





-
20世纪90年代,美国提出“快、好、省”的小卫星空间应用技术,成为国际航天领域一个新的研究热点[1]。美国商业遥感卫星Skybox Imaging公司研制的SkySat系列卫星可以实现亚米级(0.9 m)空间分辨率,幅宽为8 km,单星质量仅为100 kg[2]。美国陆军Nano Eye卫星在300 km轨道高度具有1 m空间分辨率,单星质量仅为20.6 kg[3]。近年来,小卫星及小卫星星座技术凭借其低成本、轻小型、高机动性的特点在遥感、测绘、军事、天基态势感知等领域得到了广泛的应用[4]。
为了适应在微小卫星平台的基础上获取高分辨率、多谱段对地遥感图像,需要解决载荷小型化与长焦距、高分辨率、多功能性之间的矛盾。传统的同轴三反光学系统为了引出像面需要在光路中增加折叠镜,导致系统产生二次遮拦,而采用偏视场结构虽然可以避免系统的二次遮拦,但边缘视场成像质量会受到残余彗差、像散和畸变的影响[5-6],导致成像质量下降。为了解决上述问题,国内外研究人员针对四反系统进行了相应的研究[7-10],并对系统初始结构进行了推导。
文中利用高斯光学和三级像差理论,对二次成像的同轴四反光学系统初始结构进行了推导。在此基础上,通过视场偏移的方式使平面反射镜与四镜空间分离,在极大地压缩系统尺寸的同时,为后续多光路耦合的分光结构提供空间。同时将凹面四镜放置在主系统实出瞳前,配合中波红外通道成像镜组,可以有效地将系统实出瞳后移,实现系统的冷光阑匹配。这种光学结构避免了三反系统后光路分光中出瞳位置靠前,红外系统需要采用冷光学的设计方案[11],理论上可以实现100%的冷光阑效率并有效抑制红外杂散辐射(特别是成像镜组)对红外系统成像质量的影响。文中以光谱范围0.45~0.85 μm可见光通道、3.7~4.8 μm中波红外通道为例,设计了大视场、长焦距二次成像偏视场多光路耦合同轴四反光学系统,并对系统的成像质量及公差进行了详细的分析。在充分利用主光学系统能力的同时,尽可能压缩系统整体尺寸,合理布局,提升载荷与轻小型卫星平台的适用性。
-
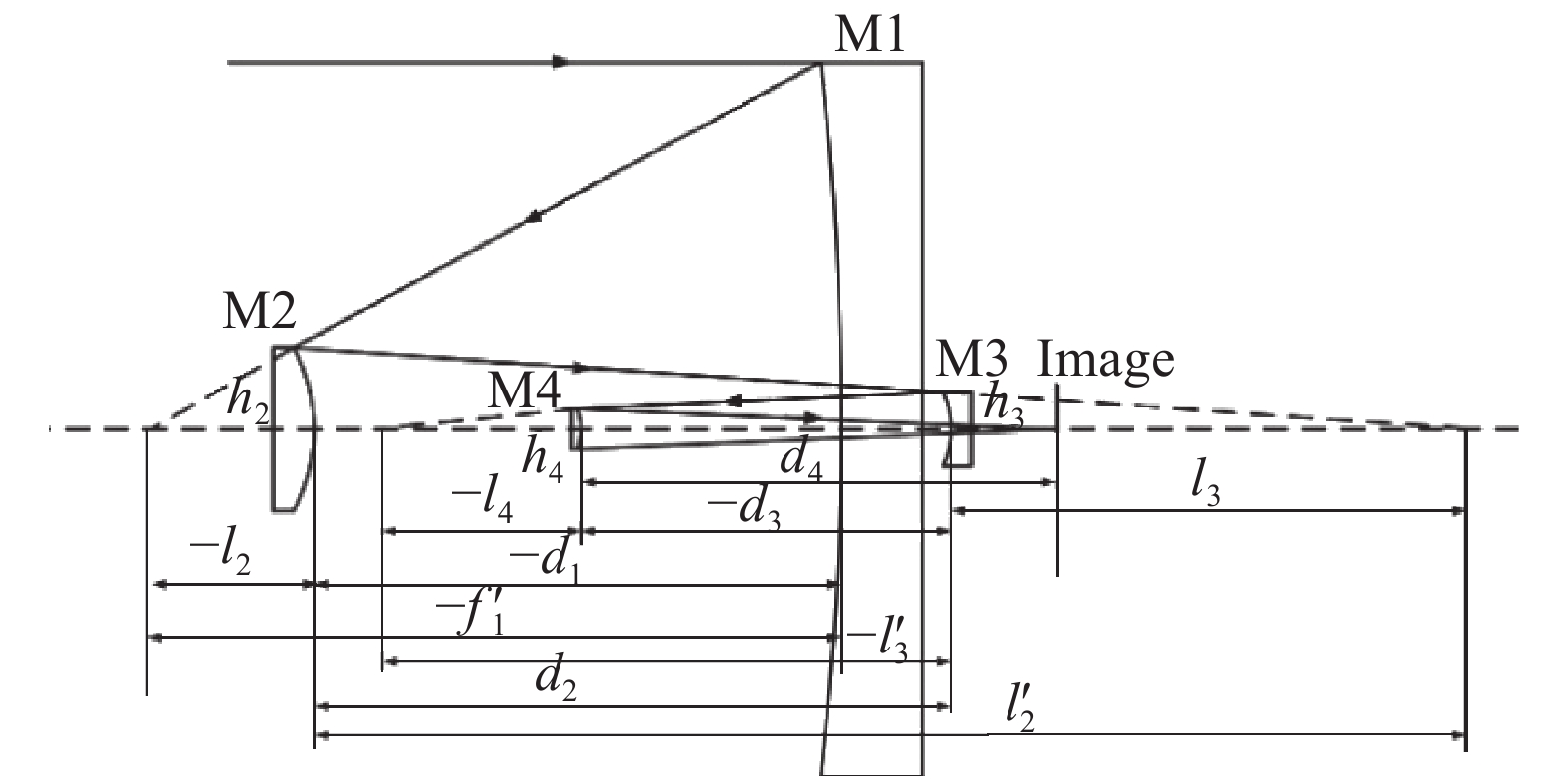
同轴四反光学系统结构如图1所示。四反系统中的结构参数有:四个反射镜的曲率半径R1、R2、R3和R4,主镜(M1)到次镜(M2)的距离d1,次镜到三镜(M3)的距离d2,三镜到四镜(M4)的距离d3,以及各反射镜的二次曲面系数
$ -{e}_{1}^{2} $ 、$ -{e}_{2}^{2} $ 、$ -{e}_{3}^{2} $ 及$ -{e}_{4}^{2} $ 。从图1中可以看出,同轴四反光学系统的结构参数可以表示为[12]:$$ {\alpha }_{1}=\frac{{l}_{2}}{{f}_{1}^{{'}}}\approx \frac{{l}_{2}}{{h}_{1}} $$ (1) $$ {\alpha }_{2}=\frac{{l}_{3}}{{l}_{2}^{{'}}}\approx \frac{{h}_{3}}{{h}_{2}} $$ (2) $$ {\alpha }_{3}=\frac{{l}_{4}}{{l}_{3}^{{'}}}\approx \frac{{h}_{4}}{{h}_{3}} $$ (3) $$ {\beta }_{1}=\frac{{l}_{2}^{{'}}}{{l}_{2}}=\frac{{u}_{2}}{{u}_{2}^{{'}}} $$ (4) $$ {\beta }_{2}=\frac{{l}_{3}^{{'}}}{{l}_{3}}=\frac{{u}_{3}}{{u}_{3}^{{'}}} $$ (5) $$ {\beta }_{3}=\frac{{l}_{4}^{{'}}}{{l}_{4}}=\frac{{u}_{4}}{{u}_{4}^{{'}}} $$ (6) 式中:α1、α2、α3分别为次镜对主镜、三镜对次镜和四镜对三镜的遮拦比;β1、β2、β3分别为次镜、三镜和四镜的角放大率;li为物距;
$ {l}_{i}^{{'}} $ 为像距;hi为反射镜半口径;$ {f}_{1}^{{'}} $ 为主镜焦距;ui为各反射镜光线入射角;$ {u}_{i}^{{'}} $ 为各反射镜光线反射角。假设物体位于无穷远且系统入瞳位于主镜上,则
$ {l}_{1}=\infty $ ,$ {u}_{1}=0 $ ,$ {x}_{1}={y}_{1}=0 $ ,对该系统进行归一化处理,令主镜半口径$ {h}_{1}=1 $ ,焦距$ {f}^{{'}}=1 $ 。同时对于反射式系统,折射率可以表示为:$ {n}_{1}={n}_{2}^{{'}}={n}_{3}={n}_{4}^{{'}}=1 $ ,$ {n}_{1}^{{'}}={n}_{2}= $ $ {n}_{3}^{{'}}={n}_{4}=-1 $ ;光线夹角可以表示为:$ {u}_{1}=0 $ ,$ {u}_{2}={u}_{1}^{{'}}= $ $ {\beta }_{1}{\beta }_{2}{\beta }_{3} $ ,$ {u}_{3}={u}_{2}^{{'}}={\beta }_{2}{\beta }_{3} $ ,$ {u}_{4}={u}_{3}^{{'}}={\beta }_{3} $ ;镜面半口径可以表示为:$ {h}_{1}=1 $ ,$ {h}_{2}={\alpha }_{1} $ ,$ {{h}_{3}=\alpha }_{1}{\alpha }_{2} $ ,$ {{h}_{4}=\alpha }_{1}{\alpha }_{2}{\alpha }_{3} $ ;物距$ {l}_{i} $ 和像距$ {l}_{i}^{{'}} $ 可以表示为:$ {l}_{1}^{{'}}={l}_{2}={\alpha }_{1}/\left({\beta }_{1}{\beta }_{2}{\beta }_{3}\right) $ ,$ {l}_{2}^{{'}}={\alpha }_{1}/\left({\beta }_{2}{\beta }_{3}\right) $ ,$ {l}_{3}=\left({\alpha }_{1}{\alpha }_{2}\right)/\left({\beta }_{2}{\beta }_{3}\right) $ ,$ {l}_{3}^{{'}}=\left({\alpha }_{1}{\alpha }_{2}\right)/{\beta }_{3} $ ,$ {l}_{4}=\left({\alpha }_{1}{\alpha }_{2}{\alpha }_{3}\right)/{\beta }_{3} $ ,$ {l}_{4}^{{'}}= $ $ {\alpha }_{1}{\alpha }_{2}{\alpha }_{3} $ 。利用几何光学可以得到四反系统各镜曲率半径Ri、间隔di及主光线高度yi的表达式为:$$ \left\{ {\begin{array}{*{20}{l}} {{R_1} = 2/\left( {{\beta _1}{\beta _2}{\beta _3}} \right)}\\ {{R_2} = 2{\alpha _1}/\left[ {(1 + {\beta _1}} \right){\beta _2}{\beta _3}]}\\ {{R_3} = 2{\alpha _1}{\alpha _2}/\left[ {(1 + {\beta _2}} \right){\beta _3}]}\\ {{R_4} = 2{\alpha _1}{\alpha _2}{\alpha _3}/(1 + {\beta _3})} \end{array}} \right.$$ (7) $$ \left\{ {\begin{array}{*{20}{l}} {{d_1} = (1 - {\alpha _1})/\left( {{\beta _1}{\beta _2}{\beta _3}} \right)}\\ {{d_2} = {\alpha _1}(1 - {\alpha _2})/\left( {{\beta _2}{\beta _3}} \right)}\\ {{d_3} = {\alpha _1}{\alpha _2}(1 - {\alpha _3})/{\beta _3}} \end{array}} \right.$$ (8) $$ \left\{ {\begin{array}{*{20}{l}} {{y_1} = 0}\\ {{y_2} = ({\alpha _1} - 1)/\left( {{\beta _1}{\beta _2}{\beta _3}} \right)}\\ {{y_3} = [{\alpha _2}\left( {{\alpha _1} - 1} \right) + {\beta _1}(1 - {\alpha _2})]/({\beta _1}{\beta _2}{\beta _3})}\\ {{y_4} = [1 + {\alpha _1}{\alpha _2}(1 - {\alpha _3})/{\beta _3}{\varDelta _1}]{y_3}} \end{array}} \right. $$ (9) 其中:公式(9)中
$ {\varDelta }_{1} $ 的表达式如公式(10)所示。将公式(1)~(9)及系统参数代入公式(11)中,可以得到四反系统P、W、П、Φ和K的相应数学表达式。利用赛德和像差中球差、彗差、像散、场曲和畸变的数学表达式(公式(12))即可计算出同轴四反光学系统的初始结构参数
$ {\alpha }_{1} $ 、$ {\alpha }_{2} $ 、$ {\alpha }_{3} $ 、$ {\;\beta }_{1} $ 、$ {\;\beta }_{2} $ 、$ {\;\beta }_{3} $ 以及各反射镜二次曲面系数$ -{e}_{1}^{2} $ 、$ -{e}_{2}^{2} $ 、$ -{e}_{3}^{2} $ 及$ -{e}_{4}^{2} $ 。$$\begin{split}& {\varDelta }_{1}=\\ & \frac{{\alpha }_{1}{\alpha }_{2}[\left(1\!-\!{\alpha }_{1}\right)\left(2\!-\!{\alpha }_{2}\right)\!+\!{\beta }_{1}(1-{\alpha }_{2}\left)\right]}{{\beta }_{3}\{\left(1\!+\!{\beta }_{2}\right)\left[\left(1-{\alpha }_{1}\right)\left(2\!-\!{\alpha }_{2}\right)\!+\!{\beta }_{1}\left(1\!-\!{\alpha }_{2}\right)\right]-{\alpha }_{2}{\beta }_{2}(1\!+\!{\beta }_{1}\!-\!{\alpha }_{1}\left)\right\}} \end{split}$$ (10) $$ \left\{\begin{array}{l}P={\left[\dfrac{\varDelta u}{\varDelta (1/n)}\right]}^{2}\varDelta \dfrac{u}{n}\\ W=\dfrac{\varDelta u}{\varDelta (1/n)}\varDelta \dfrac{u}{n}\\ \displaystyle\prod = \dfrac{\varDelta \left(nu\right)}{n{n}^{{'}}}\\ \varPhi =\dfrac{1}{h}\varDelta \dfrac{u}{n}\\ K=-\dfrac{{e}^{2}}{{R}^{3}}\varDelta n\end{array}\right. $$ (11) $$ \left\{ {\begin{array}{*{20}{l}} {{S_I} = \! \displaystyle\sum \! hP \!+\! \! \displaystyle\sum \! {h^4}K}\\ {{S_{II}} = \! \displaystyle\sum \! yP - J\! \displaystyle\sum \! W \!+\! \! \displaystyle\sum \! {h^3}yK}\\ {{S_{III}} = \! \displaystyle\sum \! \dfrac{{{y^2}P}}{h} \!+\! 2J\! \displaystyle\sum \! \dfrac{y}{h}W \!+\! {J^2}\! \displaystyle\sum \! \varPhi \!+\! \! \displaystyle\sum \! {h^2}{y^2}K}\\ {{S_{IV}} = \! \displaystyle\sum \! \dfrac{\Pi }{h}}\\ {S_V} = \! \displaystyle\sum \! \dfrac{{{y^3}P}}{{{h^2}}} - 3J\! \displaystyle\sum \! \dfrac{{{y^2}W}}{{{h^2}}} \!+\! {J^2}\! \displaystyle\sum \! \dfrac{y}{h}\left( {3\varPhi \!+\! \dfrac{\Pi }{h}} \right) - \\ {J^3}\! \displaystyle\sum \! \dfrac{1}{{{h^2}}}\Delta \dfrac{1}{{{n^2}}} \!+\! \! \displaystyle\sum \! h{y^3}K \end{array}} \right. $$ (12) 
图 1 同轴四反光学系统结构图
Figure 1. Layout of coaxial four-mirror optical system
-
根据中间像面的位置,四反系统具有三种结构形式,分别为:中间像面位于主、次镜中间(
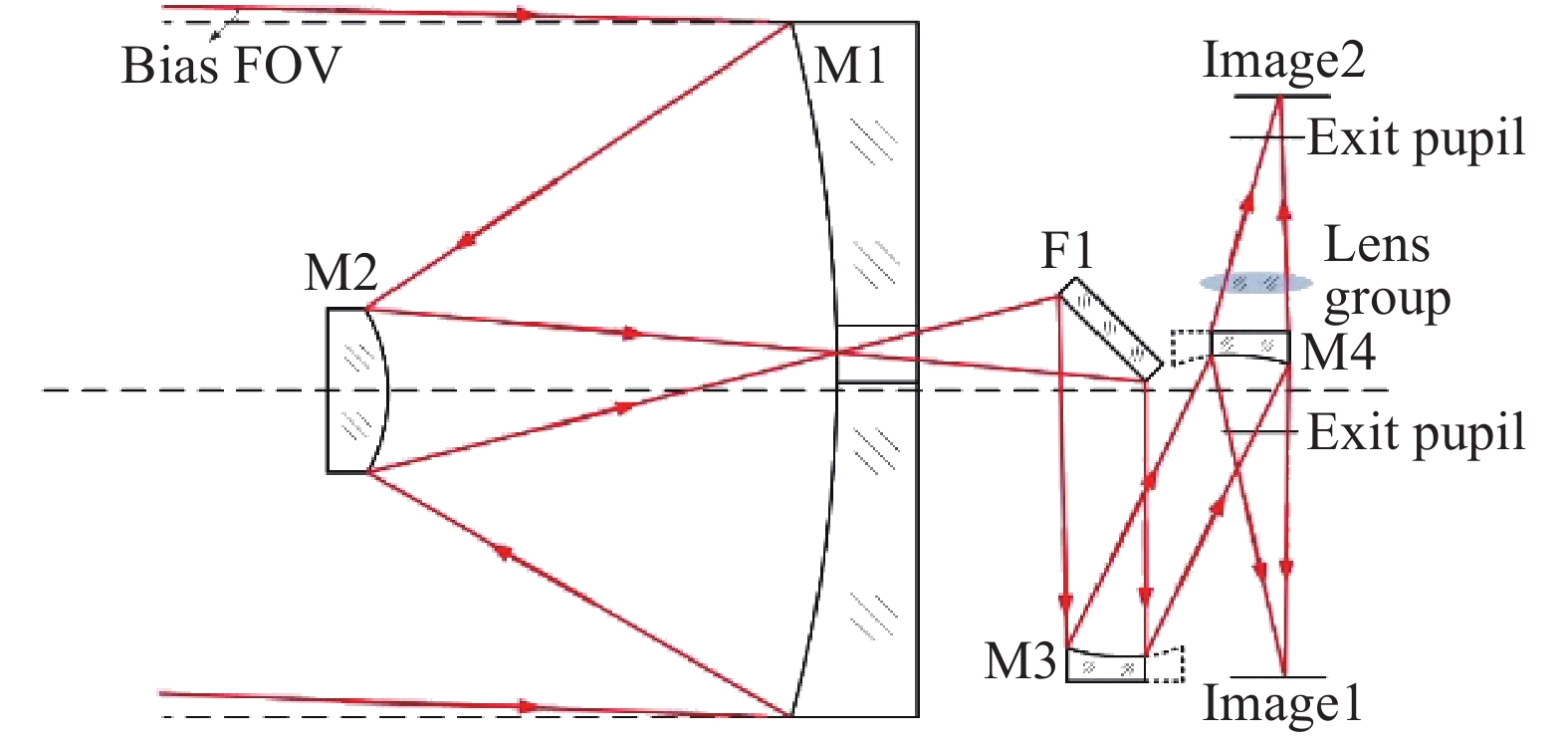
$-l'_1 < -{d}_{1}$ );中间像面位于次、三镜之间($l'_2 < {d}_{2}$ );中间像面位于三、四镜之间($-l'_3 < -{d}_{3}$ )。当$ {\alpha }_{1} $ 、$ {\alpha }_{2} $ 、$ {\alpha }_{3} $ 、$ {\beta }_{1} $ 、$ {\beta }_{2} $ 、$ {\beta }_{3} $ 取不同数值时,可求解出三种不同形式的光学系统初始参数,三种结构形式各自的特点为:(1)系统一次像面位于主、次镜中间,次镜为凹面镜,次镜尺寸及所引起的中心遮拦取决于主镜F#和主次镜间隔。在该类型结构中通常在系统的一次像面(尺寸最小)附近增加平面反射镜对光路进行折转,以降低一次遮拦对系统成像质量的影响。但该类型结构在折转光路后,其余光学元件和焦面位于系统前端,在大口径光学系统中次镜尺寸较大,不利于系统整体的轻量化设计;(2)系统一次像面位于次、三镜中间,次镜为凸面,该类型结构同样可以在一次像面附近增加平面反射镜对光路进行折转,以降低系统二次遮拦。利用偏视场成像的方法,调整成像光线与折叠镜的位置关系,从而完全避免二次遮拦对系统成像质量的影响;(3)系统一次像面位于三、四镜之间,次镜为凸面,该类型结构无论四镜在主、次镜之间或次镜之后,都会产生较大的二次遮拦。同时,利用偏视场避免二次遮拦时需要采用较大的视场偏离角度,导致边缘视场成像质量下降。综上所述,一次像面位于次、三镜中间的四反结构在整体构型、系统尺寸及偏视场消除二次遮拦等方面更加适用于轻小型光学载荷。从图1中可以看出,同轴反射式光学系统受结构布局的影响,次镜对于主镜入射光线的遮挡是不可避免的,这种遮挡通常被称为一次遮拦。而三镜中心孔、四镜对于三镜入射光线的遮挡可能会引起系统的二次、三次遮拦。为了避免四反系统二次以上的遮拦,在同轴四反结构的基础上引入视场离轴及平面反射镜(位于一次像面附近)对光路进行折转,使各光学元件自空间上分离,有效避免了系统的多次遮拦。同时,为了满足多光路耦合的应用需求,将四镜作为系统的分光元件并位于系统出瞳前,以实现中波红外通道的冷光阑匹配。系统初始结构如图2所示。

图 2 系统初始结构
Figure 2. Initial configuration of the system
在设计过程中,由已求得的同轴四反初始结构向偏视场四反系统过渡,同时为了保证分光元件(四镜)的加工精度并降低系统装调难度,四镜采用球面面型。因此,该具有四个曲率半径、三个二次曲面系数和三个镜面间隔,共10个设计参数,在满足球差、彗差、像散、场曲、畸变、系统焦距、像距、系统总长等五个初级像差和三个基本约束条件的基础上,剩余两个参数对系统的高级像差及结构布局进行优化调整。
-
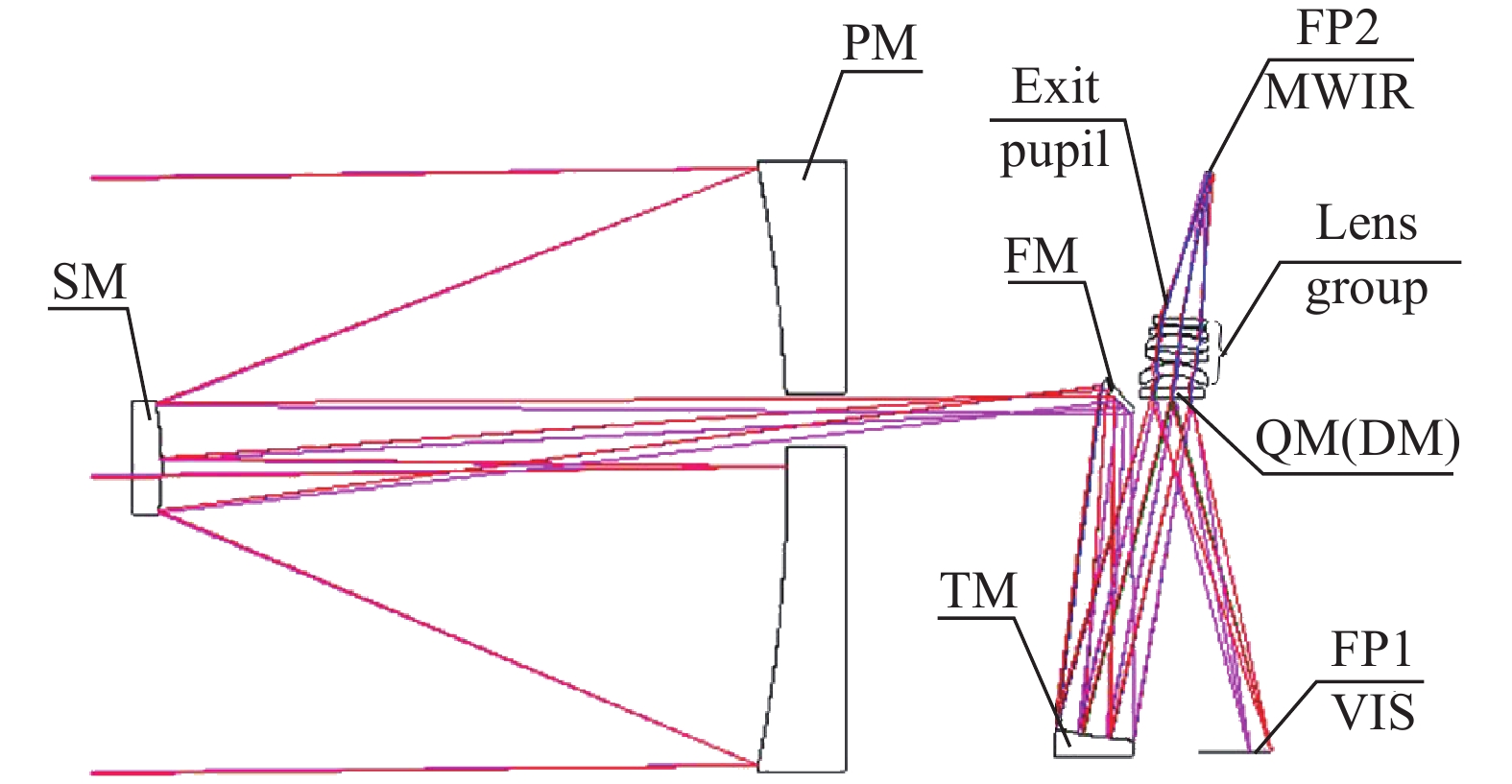
基于前文求解的初始结构,设计了一种适用于推扫成像的多光路耦合偏视场同轴四反光学系统。主光学系统结构参数如表1所示,光路图如图3所示。系统主镜面型为二次曲面系数接近于1的高次椭球面,这种面型有利于初级球差、正弦差和像散的校正。次镜面型为双曲面,三镜面型为高次双曲面。增加主镜和三镜的六次、八次非球面系数作为优化变量,进一步对系统像差进行校正。该系统可见光通道工作谱段为0.45~0.85 μm,焦距为4000 mm,相对孔径为1∶10,视场角为1.4°×0.2°,红外通道工作谱段为3.7~4.8 μm,焦距为1600 mm,相对孔径为1∶4,视场角为1.4°×0.2°。
表 1 同轴光学系统参数
Table 1. Parameters of coaxial optical system
Radius/mm Thickness/mm Conic Aspheric surface high-order term Mirror size/mm Primary mirror −1028.272 −420 −0.9868 8th Φ400 Secondary mirror −224.486 676.2 −1.5875 - Φ88 FM - −175.3 - - 98×65 Tertiary mirror 403.217 230.5 −1.1245 8th 148×56 Quartus mirror −981.876 −237.21 - - Φ53 
图 3 系统光路图
Figure 3. Optical pathway diagram of system
可见光通道由主镜(PM)、次镜(SM)、折叠镜(FM)、三镜(TM)和四镜/分色镜(QM/DM)组成,成像光线经过主镜和次镜后形成一次像面,折叠镜位于一次像面后对光路进行折转,再通过三镜和四镜最终在可见光焦面(FP1 VIS)处进行成像。在可见光通道优化设计过程中:通过优化主、次镜间隔和主镜F#对系统的一次遮拦进行控制,以提高系统信噪比并减小衍射光斑次级大对成像质量的影响;将视场偏移量作为优化变量,保证折叠镜与四镜、三镜与焦平面空间分离;将视场偏移量作为优化变量时,需要控制次镜出射光线通过主镜的位置,避免主镜中心孔边缘超出次镜产生二次遮拦;四镜为球面凹面面型并位于系统实出瞳前,一方面可以降低系统的加工、检测及装调难度,另一方面利用负光焦度对中波红外通道光线进行发散,将系统出瞳后移,保证红外通道的冷光阑匹配,实现可见及中波红外的多光路耦合成像。
红外通道经过主光学系统后,利用四镜进行分光,分光后采用透镜组对红外通道进行成像,光线追迹如图4所示。红外通道后光路由五片透镜组成,其中两片为二次曲面面型,二次曲面系数分别为1.108和−0.395。经过优化设计,红外通道出瞳位于透镜组后8 mm位置,可以实现系统100%冷光阑匹配。同时,为了有效抑制杂散光对系统成像质量的影响,可以在一次像面位置设置视场光阑,实出瞳位置设置Lyot光阑,并在主光学系统结构中增加蜂窝状的微型结构、遮光板及遮光罩等杂散光陷阱对系统的杂散光进行抑制。
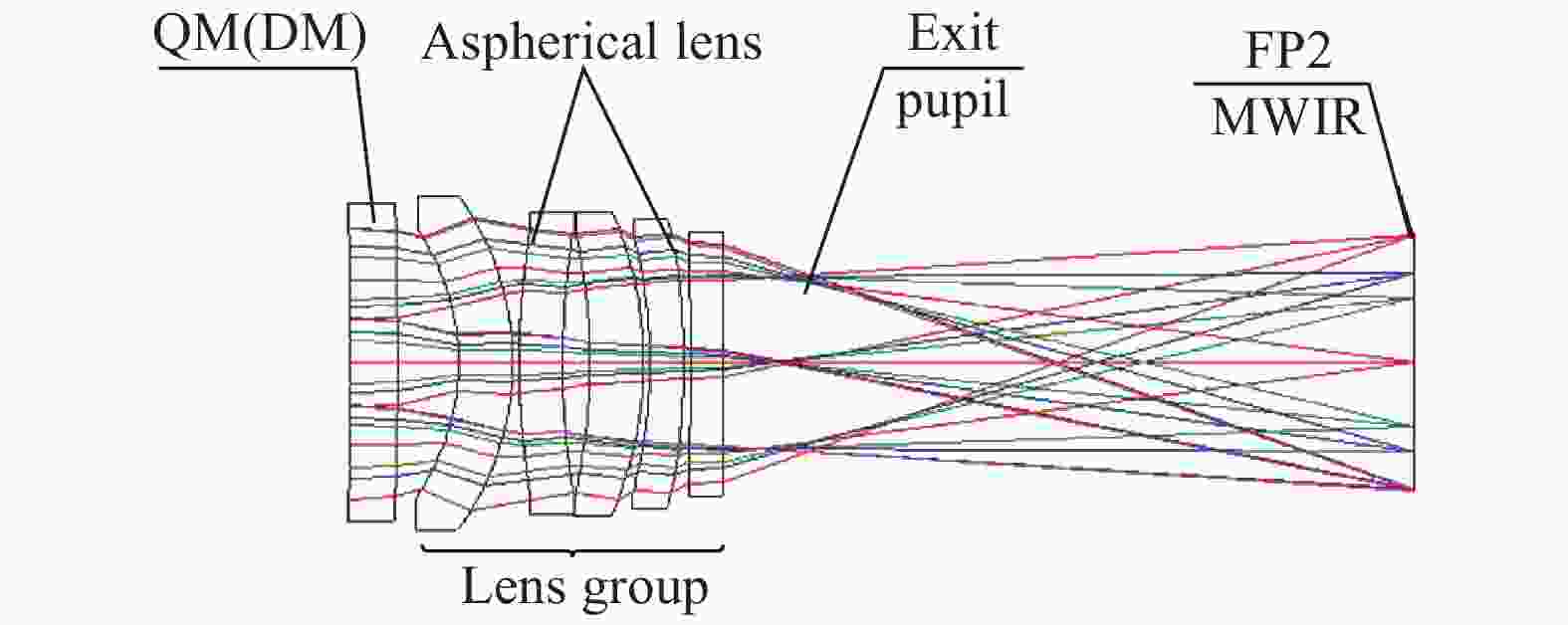
图 4 中波红外通道光路图
Figure 4. Optical pathway diagram of MWIR channel
最终系统光学设计尺寸为730 mm×400 mm ×400 mm,光学总长为f’/5.48,宽度和高度为f’/10 (f’为可见光系统焦距),系统结构紧凑,具有较高的压缩比。通过设计实例可以看出:(1)通过偏视场的使用,保证系统光学元件的安装空间,避免系统的二次遮拦;(2)充分利用主反射式光学系统能力,可有效地降低研制成本;(3)利用凹面四镜作为分光元件,使得红外通道出瞳后移,可以实现红外通道的冷光阑匹配,有效抑制杂散辐射对中波红外通道成像质量的影响;(4)主、次镜同轴,三、四镜的法向与Y轴平行且四镜为球面面型,降低了三、四镜装调难度。
-
可见光通道与中波红外通道视场均为1.4°×0.2°,采用偏视场设计方式,弧矢方向有效视场为−0.7°~0.7°,子午方向有效视场为0.65°~0.85°。在有效矩形视场内选取六个具有代表性的视场点,对各通道的成像质量分别进行评价。视场如表2所示,各编号视场位置如图5所示。
表 2 视场角
Table 2. Field of view
1 2 3 4 5 6 x/(°) 0 0.35 0.49 0.7 0.7 −0.7 y/(°) 0.75 0.75 0.75 0.75 0.65 0.85 
图 5 视场位置
Figure 5. Location of the field of view
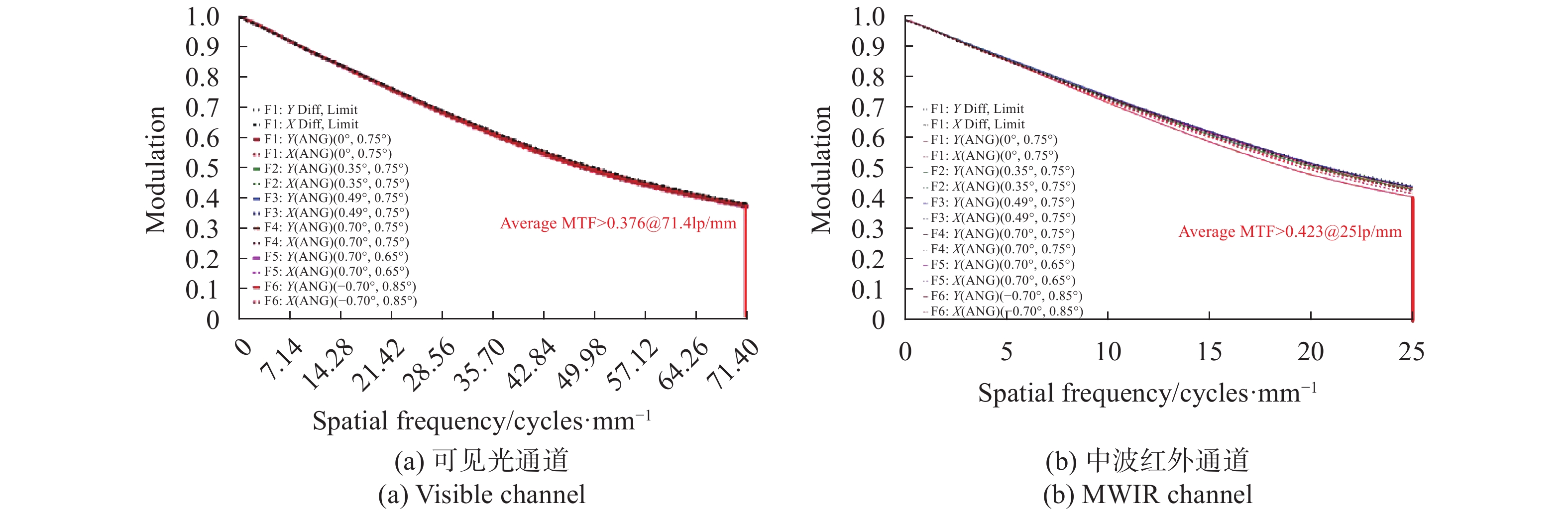
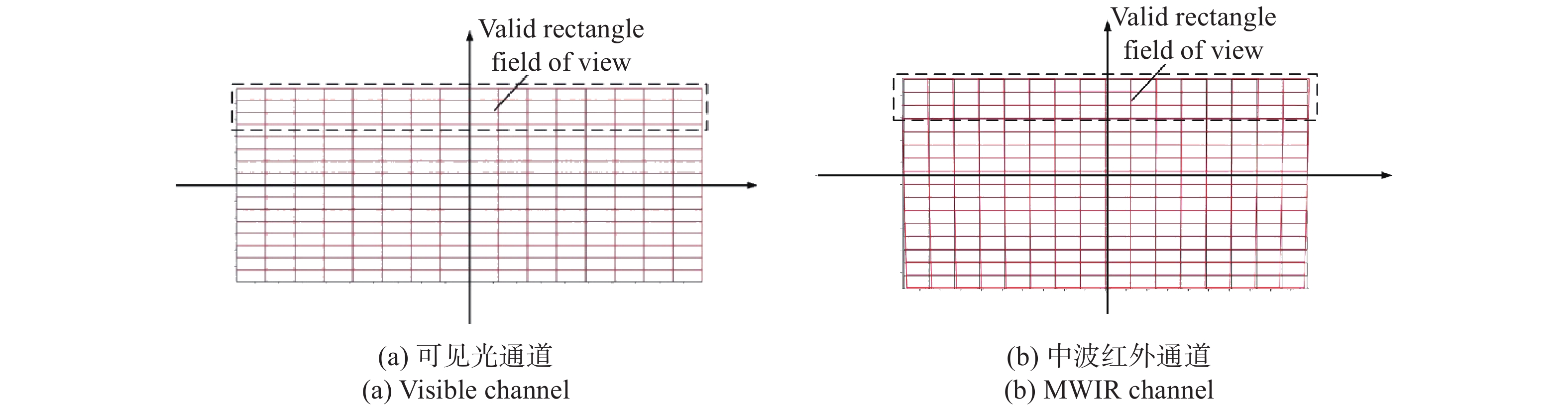
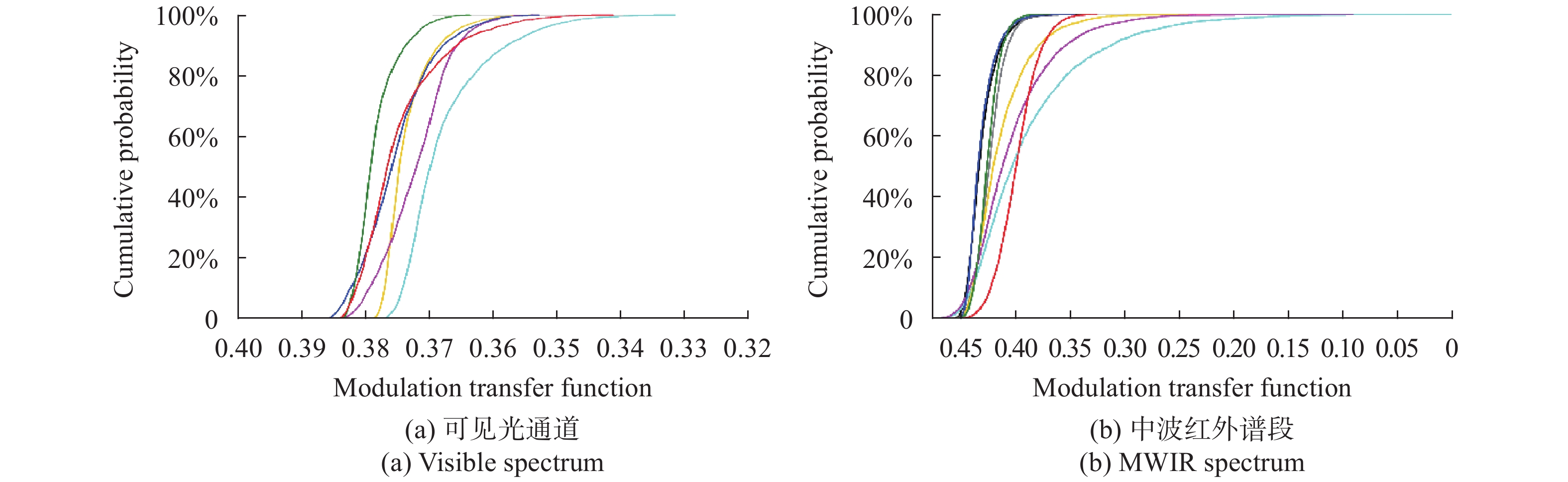
分别采用λ=632.8 nm和λ=4000 nm作为可见光通道和中红外通道的参考波长,各通道波像差如表3所示。根据参考波长及系统参数,可以得到可见光谱段的艾里斑直径为15.44 μm (可见光谱段),中波红外谱段的艾里斑直径为39.04 μm,各通道点列图如表4所示。可见光通道采用7 μm像元探测器,奈奎斯特频率为71.4 lp/mm,中波红外通道采用20 μm像元探测器,奈奎斯特频率为25 lp/mm,各通道奈奎斯特频率处调制传递函数(MTF)曲线如图6所示。在有效视场内可见光通道与中波红外通道的畸变网格如图7所示。
表 3 光学系统波像差
Table 3. Wave aberration of optical system
FOV VIS WFE RMS MWIR WFE RMS (0°, 0.75°) 0.0183 0.041 (0.35°, 0.75°) 0.0155 0.0281 (0.49°, 0.75°) 0.0179 0.0255 (0.70°, 0.75°) 0.0198 0.0281 (0.70°, 0.65°) 0.0197 0.0292 (−0.70°, 0.85°) 0.0266 0.03 表 4 各通道点列图差
Table 4. Spot diagram of different channels
No. FOV Channel VIS channel MWIR channel 1 (0°, 0.75°) 
RMS=0.0027 100% size=0.0063 
RMS=0.0097 100% size=0.018 2 (0.35°, 0.75°) 
RMS=0.0021 100% size=0.0051 
RMS=0.0061 100% size=0.013 3 (0.49°, 0.75°) 
RMS=0.0020 100% size=0.0047 
RMS=0.0062 100% size=0.019 4 (0.70°, 0.75°) 
RMS=0.0021 100% size=0.0038 
RMS=0.0063 100% size=0.019 5 (0.70°, 0.65°) 
RMS=0.0020 100% size=0.0045 
RMS=0.0069 100% size=0.025 6 (−0.70°, 0.85°) 
RMS=0.0026 100% size=0.0056 
RMS=0.0076 100% size=0.022 
图 6 各通道MTF曲线
Figure 6. MTF curves of different channel

图 7 各通道畸变网格
Figure 7. Distortion grid of different channel
可见光通道系统最大波像差RMS值为λ/37.6,中波红外通道系统最大波像差RMS值为λ/24.4。同时,虽然采用偏视场的成像方式避免了系统的多次遮拦,但次镜对于主镜的一次遮拦是不可避免的,这也导致了系统的MTF下降,可见光通道在奈奎斯特频率(71.4 lp/mm)处的设计MTF优于0.376,中波红外通道在奈奎斯特频率(25 lp/mm)处的设计MTF优于0.423。在有效矩形视场内,可见光通道最大网格畸变值为0.02%,中波红外通道最大网格畸变值为1.52%。从设计结果可以看出,系统各通道在有效矩形视场内成像质量均接近衍射极限,具有良好的成像质量。
-
系统设计完成后,以表3中视场点作为特征点,采用Monte-Carlo方法对各光学元件加工制造公差与系统装调公差进行分析,模拟1000次系统加工装调,以系统奈奎斯特频率处的MTF作为评价指标。在分析过程中,以主镜作为系统装调基准,依次调整次镜、三镜、四镜(分色镜)、透镜组及各通道像面位置完成系统装调。在中波红外通道分析过程中,以图8中QM(DM)后第一个透镜为Lens 1,其他透镜依次排列。系统可见光通道公差分配结果如表5所示,中波红外通道公差分配结果如表6所示,各通道累计概率随MTF变化的曲线如图7所示,公差分析结果如表7所示。

图 8 公差概率曲线
Figure 8. Curves of tolerance probability
表 5 可见光通道公差分配结果
Table 5. Tolerance allocation result of visible channel
Type Item Primary mirror Secondary mirror Third mirror Quartus mirror Displacement x/mm Reference for alignment 0.05 0.03 0.08 Displacement y/mm 0.02 0.05 0.05 Assembling Displacement z/mm 0.1 0.05 0.08 Tilt α/(″) 15 20 20 Tilt β/(″) 10 10 20 Tilt γ/(″) 30 20 - ΔR/mm 1 0.5 0.8 1 Manufacturing ΔK 0.0008 0.002 0.002 - ΔB 5.0×10−20 - 5×10−17 - ΔC 5.0×10−25 - 5×10−20 - Surface error RMS(λ=632.8 nm) λ/50 λ/60 λ/50 λ/30 表 6 中波红外通道公差分配结果
Table 6. Tolerance allocation result of MWIR channel
Type Item Lens 1 Lens 2 Lens 3 Lens 4 Lens 5 Displacement x/mm 0.02 0.05 0.02 0.04 0.05 Displacement y/mm 0.02 0.05 0.02 0.04 0.05 Assembling Displacement z/mm 0.04 0.08 0.04 0.1 0.1 Tilt α/(″) 15 20 15 15 20 Tilt β/(″) 15 20 15 15 20 DLF 3 3 3 3 3 Manufacturing ΔK(concave surface) 0.002 - - 0.002 - Surface error RMS(λ=632.8 nm) λ/30 λ/30 λ/30 λ/30 λ/30 表 7 公差分析结果
Table 7. Results of tolerance analysis
Cumulative
probabilityMTF Visible(71.4 lp/mm) MWIR(25 lp/mm) 50% 0.371 0.395 84.1% 0.363 0.347 97.7% 0.351 0.318 99.9% 0.332 0.305 从统计结果可以看出,系统公差较为宽松,可见光通道在奈奎斯特频率处MTF有84%的概率优于0.363,中波红外通道在奈奎斯特频率处有84%的概率优于0.347。
在装调及检测方面,系统主镜、次镜和三镜均为非球面面型,可以采用Offner型补偿器进行检测,四镜为球面面型,可直接放置在干涉仪光路中进行检测。在系统装调方面,主镜作为安装基准,利用计算机辅助装调技术对主、次镜进行安装,通过调整主、次镜间隔及光轴倾斜可以有效减小装调所引入的球差和像散,从而得到像质优良的两镜系统。以两镜系统作为基准,对平面反射镜、三镜及四镜进行安装,在可见光通道装调完成后对中波红外通道进行安装。系统在加工及装调过程均采用已成熟应用的技术手段,具备良好的可实现性。
-
设计了一种紧凑型偏视场多光路耦合同轴四反光学系统。系统主镜、次镜和三镜为非球面面型,四镜为球面面型。经设计与优化,最终系统实现了1.4°×0.2°视场多光路耦合成像,可见光通道最大畸变0.02%,中波红外通道最大畸变1.52%,系统光学总长优于f’visible/5.48,各通道MTF曲线接近衍射极限,成像质量良好。系统设计完成后对公差进行了分析,系统公差较为宽松,具有良好的可实现性。与传统的同轴三反多光路耦合系统相比,利用凹面四镜作为分光元件,使得系统出瞳后移,可以实现中波红外通道的冷光阑匹配,有效抑制杂散辐射对成像质量的影响。同时,该系统加工、装调简单,具有较高的压缩比,配合线阵推扫成像模式,充分适应低轨道轻小型卫星的应用需求,对轻小型空间遥感载荷光学系统设计具有一定的参考价值。
Design of high-density coaxial four-mirror optical system with field-bias and multi-light-channel coupled
-
摘要: 随着轻小型卫星技术的不断发展,紧凑型光学载荷成为空间光学领域一个新的研究热点。偏视场多光路耦合同轴四反光学系统具有长焦距、大视场和高轻量化水平等优点,可以更好地满足光学载荷高分辨率、多功能性、轻小型和低成本的应用需求,因此在轻小型光学遥感载荷领域有着广泛的应用前景。以高斯光学和三级像差理论为基础,对同轴四反光学系统的初始结构进行了分析。以一种适用于推扫成像的偏视场可见光、中波红外耦合成像光学系统为例,实例中可见光通道焦距4 m,工作谱段0.45~0.85 μm,相对孔径1∶10,中波红外通道焦距1.6 m,工作谱段3.7~4.8 μm,相对孔径1∶4,各通道视场角均为1.4°×0.2°。同时对系统成像质量及公差进行了分析,从分析结果可以看出,各通道成像质量均接近衍射极限,系统光学总长优于f’visible/5.48,具有较高的压缩比,且系统的加工和装配公差较为宽松,易于实现。Abstract: With the increasing development of light and small satellite technology, high-density optical payload has become a new hotspot research in space optical field. The field-bias and multi-light-channel coupled coaxial four-mirror optical system has the advantages of long focal length, large field of view and high degree of lightweight, which can satisfy the high-resolution, multi-function and low-cost applications of the optical payloads. Therefore, it has a widely application prospect in the field of light and small optical remote sensing payloads. Based on Gaussian optics and third-order aberration theory, the initial configuration of the coaxial four-mirror optical system was analyzed. An example of field-bias with visible spectrum and MWIR spectrum coupled optical system which was suitable for push-scanning was given. The visible channel has a focal length of 4 m, working spectrum of 0.45-0.85 μm, relative aperture of 1∶10, the MWIR channel has a focal length of 1.6 m, working spectrum of 3.7-4.8 μm, relative aperture of 1∶4, and the FOV of both channels are 1.4°×0.2°. The imaging quality and tolerance of the system were analyzed, from the results of the analysis, the imaging quality of each channel approaches the diffraction limit, the total length of the optical system is less than f’visible/5.48, the system has higher compression ratio, and has easily implemented quality because of the relatively loose tolerance about processing and assembling.
-
表 1 同轴光学系统参数
Table 1. Parameters of coaxial optical system
Radius/mm Thickness/mm Conic Aspheric surface high-order term Mirror size/mm Primary mirror −1028.272 −420 −0.9868 8th Φ400 Secondary mirror −224.486 676.2 −1.5875 - Φ88 FM - −175.3 - - 98×65 Tertiary mirror 403.217 230.5 −1.1245 8th 148×56 Quartus mirror −981.876 −237.21 - - Φ53  下载: 导出CSV
下载: 导出CSV
表 2 视场角
Table 2. Field of view
1 2 3 4 5 6 x/(°) 0 0.35 0.49 0.7 0.7 −0.7 y/(°) 0.75 0.75 0.75 0.75 0.65 0.85
下载: 导出CSV
表 3 光学系统波像差
Table 3. Wave aberration of optical system
FOV VIS WFE RMS MWIR WFE RMS (0°, 0.75°) 0.0183 0.041 (0.35°, 0.75°) 0.0155 0.0281 (0.49°, 0.75°) 0.0179 0.0255 (0.70°, 0.75°) 0.0198 0.0281 (0.70°, 0.65°) 0.0197 0.0292 (−0.70°, 0.85°) 0.0266 0.03
下载: 导出CSV
表 4 各通道点列图差
Table 4. Spot diagram of different channels
No. FOV Channel VIS channel MWIR channel 1 (0°, 0.75°) RMS=0.0027 100% size=0.0063 RMS=0.0097 100% size=0.018 2 (0.35°, 0.75°) RMS=0.0021 100% size=0.0051 RMS=0.0061 100% size=0.013 3 (0.49°, 0.75°) RMS=0.0020 100% size=0.0047 RMS=0.0062 100% size=0.019 4 (0.70°, 0.75°) RMS=0.0021 100% size=0.0038 RMS=0.0063 100% size=0.019 5 (0.70°, 0.65°) RMS=0.0020 100% size=0.0045 RMS=0.0069 100% size=0.025 6 (−0.70°, 0.85°) RMS=0.0026 100% size=0.0056 RMS=0.0076 100% size=0.022
下载: 导出CSV
表 5 可见光通道公差分配结果
Table 5. Tolerance allocation result of visible channel
Type Item Primary mirror Secondary mirror Third mirror Quartus mirror Displacement x/mm Reference for alignment 0.05 0.03 0.08 Displacement y/mm 0.02 0.05 0.05 Assembling Displacement z/mm 0.1 0.05 0.08 Tilt α/(″) 15 20 20 Tilt β/(″) 10 10 20 Tilt γ/(″) 30 20 - ΔR/mm 1 0.5 0.8 1 Manufacturing ΔK 0.0008 0.002 0.002 - ΔB 5.0×10−20 - 5×10−17 - ΔC 5.0×10−25 - 5×10−20 - Surface error RMS(λ=632.8 nm) λ/50 λ/60 λ/50 λ/30
下载: 导出CSV
表 6 中波红外通道公差分配结果
Table 6. Tolerance allocation result of MWIR channel
Type Item Lens 1 Lens 2 Lens 3 Lens 4 Lens 5 Displacement x/mm 0.02 0.05 0.02 0.04 0.05 Displacement y/mm 0.02 0.05 0.02 0.04 0.05 Assembling Displacement z/mm 0.04 0.08 0.04 0.1 0.1 Tilt α/(″) 15 20 15 15 20 Tilt β/(″) 15 20 15 15 20 DLF 3 3 3 3 3 Manufacturing ΔK(concave surface) 0.002 - - 0.002 - Surface error RMS(λ=632.8 nm) λ/30 λ/30 λ/30 λ/30 λ/30
下载: 导出CSV
表 7 公差分析结果
Table 7. Results of tolerance analysis
Cumulative
probabilityMTF Visible(71.4 lp/mm) MWIR(25 lp/mm) 50% 0.371 0.395 84.1% 0.363 0.347 97.7% 0.351 0.318 99.9% 0.332 0.305
下载: 导出CSV
-
[1] 白照广. 中国现代小卫星发展成就与展望[J]. 航天器工程, 2019, 28(2): 1-8. doi: 10.3969/j.issn.1673-8748.2019.02.001 Bai Zhaoguang. Development achievement and prospects of China modern small satellite [J]. Spacecraft Engineering, 2019, 28(2): 1-8. (in Chinese) doi: 10.3969/j.issn.1673-8748.2019.02.001 [2] Kiran Murthy, Shearn M, Smiley B D, et al. SkySat-1: Very high-resolution imagery from a small satellite [C]//Proc SPIE, 2014, 92411E: 1-12. [3] 马定坤, 匡银, 杨新权. 微纳卫星发展现状与趋趋势[J]. 空间电子技术, 2017, 14(3): 42-45. doi: 10.3969/j.issn.1674-7135.2017.03.009 Ma Dingkun, Kuang Yin, Yang Xinquan. Development actual state and trends of nano-satellite [J]. Space Electronic Technology, 2017, 14(3): 42-45. (in Chinese) doi: 10.3969/j.issn.1674-7135.2017.03.009 [4] Madry S, Martinez P, Laufer R, et al. Innovative Design, Manufacturing and Testing of Small Satellites || Small Satellites and the U. N. Sustainable Development Goals [M]. Berlin: Springer Praxis Books, 2018: 65-79. [5] 巩盾, 王红. 含有自由曲面的大视场低畸变同轴三反射光学系统设计[J]. 光学学报, 2014, 34(7): 0722001. Gong Dun, Wang Hong. Optical design of large field and low distortion coaxial three mirror system with free-form surface [J]. Acta Optica Sinica, 2014, 34(7): 0722001. (in Chinese) [6] 陈丽, 刘莉, 赵知诚, 等. 长焦距同轴四反射镜光学系统设计[J]. 红外与激光工程, 2019, 48(1): 0118002. Chen Li, Liu Li, Zhao Zhicheng, et al. Design of coaxial four-mirror anastigmat optical system with long focal length [J]. Infrared and Laser Engineering, 2019, 48(1): 0118002. (in Chinese) [7] 丁学专, 王欣, 兰卫华, 等. 离轴四反射光学系统设计[J]. 红外与激光工程, 2008, 37(2): 319-321. doi: 10.3969/j.issn.1007-2276.2008.02.032 Ding Xuezhuan, Wang Xin, Lan Weihua, et al. Design of four-mirror reflective anastigmat optic system [J]. Infrared and Laser Engineering, 2008, 37(2): 319-321. (in Chinese) doi: 10.3969/j.issn.1007-2276.2008.02.032 [8] 梁士通, 杨建峰, 薛彬, 等. 四反射镜光学系统像差分析与设计[J]. 光学学报, 2010, 30(11): 3300-3305. doi: 10.3788/AOS20103011.3300 Liang Shitong, Yang Jianfeng, Xue Bin, et al. Design of a four-mirror optical system with wide field of view [J]. Acta Optica Sinica, 2010, 30(11): 3300-3305. (in Chinese) doi: 10.3788/AOS20103011.3300 [9] Wilson R N. Reflecting Telescopes Optics I [M]. New York: Springer, 1998: 215-235. [10] Robb P N. Reflecting telescope with a spherical primary mirror [J]. Journal of the Optical Society of America, 1979, 69(10): 1439. [11] 赵宇宸, 何欣, 冯文田, 等. 同轴偏视场共孔径面阵成像光学系统设计[J]. 红外与激光工程, 2018, 47(7): 0718004. Zhao Yuchen, He Xin, Feng Wentian, et al. Design of common aperture coaxial field-bias optical system used in area array imaging sensor [J]. Infrared and Laser Engineering, 2018, 47(7): 0718004. (in Chinese) [12] 潘君骅. 光学非球面的设计、加工与检验[M]. 苏州: 苏州大学出版社, 2004: 10-37. Pan Junhua. Design, Fabrication and Testing of the Aspherical Optical Surfaces[M]. Suzhou: Soochow University Press, 2004: 10-37. (in Chinese) -

 点击查看大图
点击查看大图
计量
- 文章访问数: 362
- HTML全文浏览量: 93
- PDF下载量: 65
- 被引次数: 0


































































