








-
随着国家“海洋强国战略”的推进,适用于水下地质勘察、资源勘探、环境监测、摄影测量等应用需求的光学成像技术获得极大关注,研制可获取理想水下光学影像的专用光学系统变得十分迫切[1-4]。
近年来,公开文献报道的水下成像光学系统或为固定焦距、或为多视场切换、或为小变倍比连续变焦光学系统。其中,水下定焦光学系统一般视场较大,只工作于单一视场,用作环境监视;多视场切换型光学系统具有大小或大中小多个视场,可实现大视场监视与小视场详查功能,但无法实现变焦过程水下影像的连续获取;小变倍比连续变焦光学系统的变倍比较小,且焦段集中在短焦段,也主要用作大视场监视。另外,有针对商用镜头设计专用水下光窗的报道,但消色差光窗只适用于定焦或小变倍比镜头,而球罩一般也只用于定焦镜头[5-15]。
针对以上问题,文中就某水下大视场变焦光学系统指标要求,从水下光窗的选型、光窗引入的像差及校正方法和水下变焦系统设计三个方面出发,结合多组元变焦系统设计方法,阐述了一种水下大视场连续变焦光学系统的设计方法。
-
某水下大视场连续变焦光学系统选用0.48~0.64 μm可见谱段高灵敏度CMOS成像传感器,像元尺寸为2 μm×2 μm,像元数为3840×2160。经任务分解,具体设计指标如表1所示。
表 1 设计指标
Table 1. Design requirements
Parameter Value Work wavelength/μm 0.48-0.64 F-number 2.8-32 Diagonal field of view (DFOV)/(°) 62-5.9 Underwater distortion ≤5% Focus range 0.5 m-inf Working depth/m 11 000 Size (Without window)/mm2 ≤φ60(D)×220(L) Weight/kg ≤1.5 -
针对上述指标,下面讨论水下光学系统设计中的若干问题和设计方法。有关水下介质特性的报道已较多,此处不再赘述[16-19]。
-
如图1所示,球罩和平板是两种典型的水下光窗形式。对于前者,球面与水介质形成负透镜,当光窗球心与镜头入瞳中心重合时,可消除相对畸变和倍率色差,但对于光阑后置的一次成像变焦系统,入瞳位置会随焦距的变化发生前后移动,当变倍比较大时,入瞳移动量大,像差变化剧烈,导致设计困难。另外,水的折射率还随着温度、盐度、水深等的变化发生变化,这些都对球形光窗变焦光学系统的设计造成困难[20-22]。
而平板光窗为无焦元件,除由光窗两侧折射率不同导致光学系统视场变小和成像倍率色差及相对畸变增大外,位于光窗内侧的光学系统像差特性基本不受外界水折射率变化的影响,这也极大地便利了大变倍比水下大视场变焦光学系统的设计,为文中水下大视场变焦光学系统优选的光窗形式[21-23]。

图 1 两种典型水下光窗示意图
Figure 1. Schematics of two typical kind of underwater optical window structures
-
水下平板窗口会影响入射成像光线的出射角度,进而减小后组物镜的有效成像视场[21-23]。
如图 2所示,由物方至像方依次设置水、平板光窗、空气、成像物镜和焦面。若设水介质的折射率为n1,光线进入窗口的入射角为
${\theta }_{\rm{in}}$ ,窗口材料折射率为n2,光线从窗口进入空气的出射角为${\theta }_{\rm{out}}$ ,空气折射率为n3,则有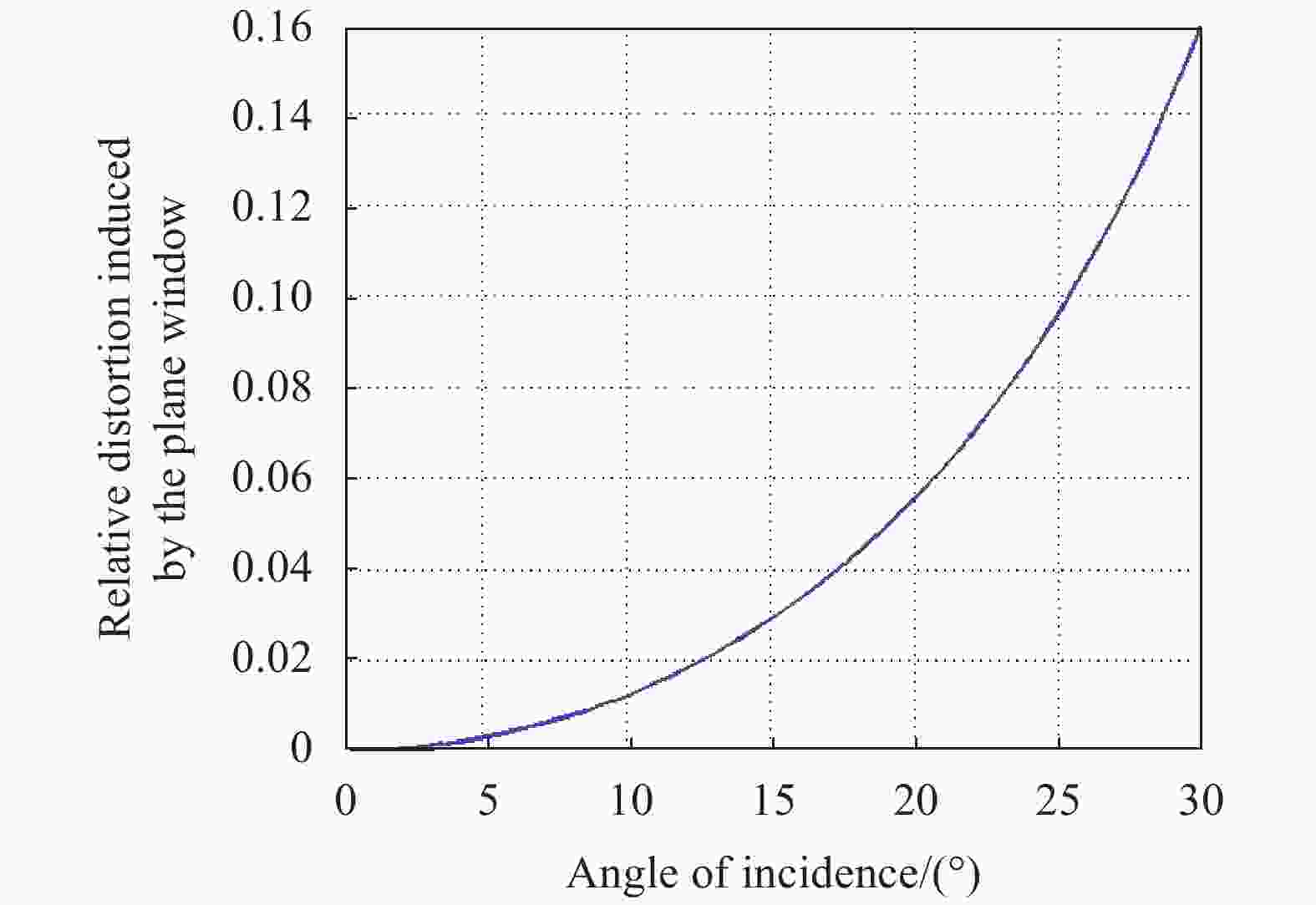
图 2 相对畸变随入射角变化分布示意图
Figure 2. Schematic of the change of relative distortion vs angle of incidence
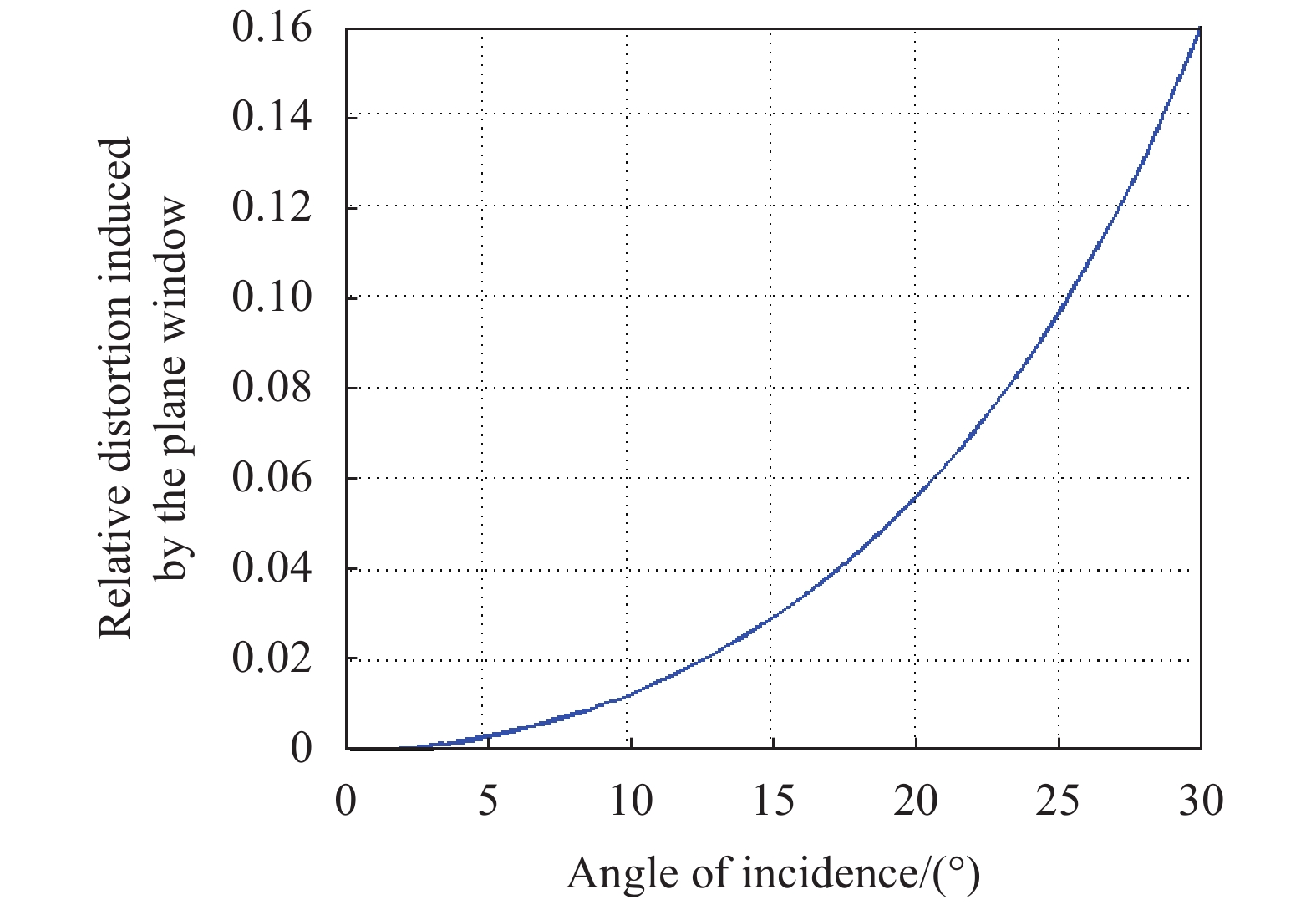
$$ {{n}}_{1}{\rm sin}{\theta }_{{\rm{in}}}={n_3}\rm sin{\theta }_{out} $$ (1) 若取水介质的折射率n1=1.33,空气折射率n3=1.0,可知,水下平板光窗会将成像物镜的有效视场缩小为空气中的约2/3。
进一步,设成像物镜在空气中的焦距为
${f}_{\rm{obj-air}}^{\rm{'}}$ ,在水下的等效焦距为${f}_{\rm{obj-uw}}^{\rm{'}}$ ,则有$$ {f}_{{\rm{obj-uw}}}^{\rm{'}}={n}_{1}· {f}_{{\rm{obj-air}}}^{\rm{'}} $$ (2) 若定义相对畸变
$$ Dist=\frac{{y}^{\rm{'}}-y}{y} $$ (3) 其中,理想像高
$y={f}_{{\rm{obj-uw}}}^{\rm{'}} {\rm{tan}}{\theta }_{{\rm{in}}}$ ,真实像高${y}^{\rm{'}}={f}_{{\rm{obj-air}}}^{\rm{'}} {\rm{tan}}{\theta }_{{\rm{out}}}$ ,整理可得$$ Dist=\dfrac{{\rm{tan}}\left(\mathit{{\rm{arcsin}}}\left(\dfrac{{n}_{1}{\rm{sin}}{\theta }_{{\rm{in}}}}{{n}_{3}}\right)\right)}{{n}_{1}{\rm{tan}}{\theta }_{{\rm{in}}}}-1 $$ (4) 此时,由平板光窗引入的相对畸变分布如图2所示,主要为正畸变(枕形畸变)。
此外,若设水对F线和C线波长光的折射率分别为
${{n}}_{\rm{1F}}$ 和${{n}}_{\rm{1C}}$ ,并取盐度0、温度20 ℃、浅水条件的水下工作环境,则有出射角差值${\theta }_{{\rm{outF}}}-{\theta }_{{\rm{outC}}}$ 随入射角的变化如图3所示,即知由平板光窗引入的倍率色差为正。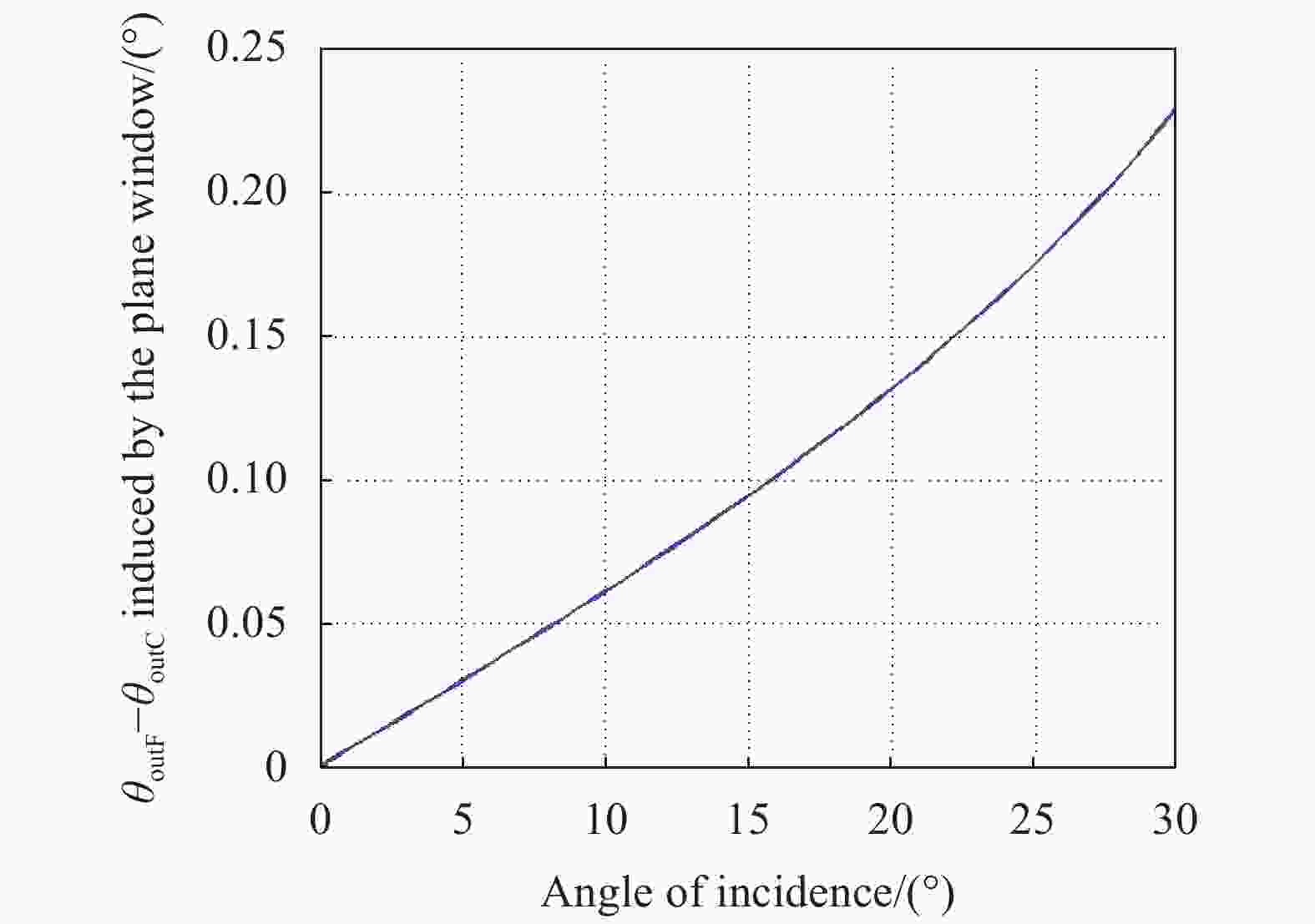
图 3
${\theta }_{\rm{outF}}-{\theta }_{\rm{outC}}$ 随入射角变化分布示意图Figure 3. Schematic diagram of the change of
${\theta }_{\rm{outF}}-{\theta }_{\rm{outC}}$ vs angle of incidence为应对由水下平板光窗导致的上述问题:指标分解上,在设计阶段尤其要注意平板光窗对水下光学系统的视场压缩;光焦度分配上,物镜组总光焦度应为负,以校正平板光窗引入的正畸变;材料选择上,物镜组也应以高折射率高色散材料为主;而且,通过采用折射率相近、色散相差较大的材料组合可实现消色差平板光窗[23-25]。
-
水下工况对光学系统有严格的包络限制,尤其是深海应用,光学系统包络直接影响耐压壳体与整机的体积和质量。针对表1中的技术要求,结合项目组设计经验[26],如图4所示,给出了一种三组联动变焦光学系统设计模型示意图。整个光学系统在PNNP型结构的后固定组中,引入像差稳定镜组,共包含:前固定镜组F、变倍镜组Z、补偿镜组C、中间固定镜组MF、像差稳定镜组AS和后固定镜组BF。其中Z和C组承担光学系统主要变倍能力,AS镜组对由Z和C组运动导致的动态像差做进一步稳定和补偿。提高了整个光学系统的像差校正能力,可进一步压缩长度,改善光学系统性能。

图 4 一种三组元联动变焦镜头设计模型示意图
Figure 4. Schematics of the design model of zoom lens with three linkage group
需要特别指出的是,该类三组元连续变焦设计模型兼具PNNP型无换根点的优点,在变焦方程及参数求解方面也可参考典型PNNP型变焦系统。设计过程中,只需单独控制像差稳定镜组的放大倍率不通过或平滑通过m=−1点,即可保证该镜组变焦过程平滑、连续、稳定,进一步简化了光学设计过程[27-30]。
-
受工作环境限制,大多数水下成像光学系统需具备近距成像能力;对于变焦光学系统,还要求对同一近景目标,变焦全程图像应连续一致保持清晰;而对于电视摄影用途,对不同物距场景,对焦过程还应精准可控,以最大程度保证跟焦准确。此时,采用传统的整组或后调焦的方式均很难实现上述功能。
针对上述问题,在靠近物方侧的镜组中设置一组或几组镜片实现对近景目标的高效调焦和对不同物距目标的精准跟焦,并可同时保证变焦全程对近景目标的清晰成像。另外,调焦过程引入的呼吸效应视不同用途也应得到关注[27-29]。
-
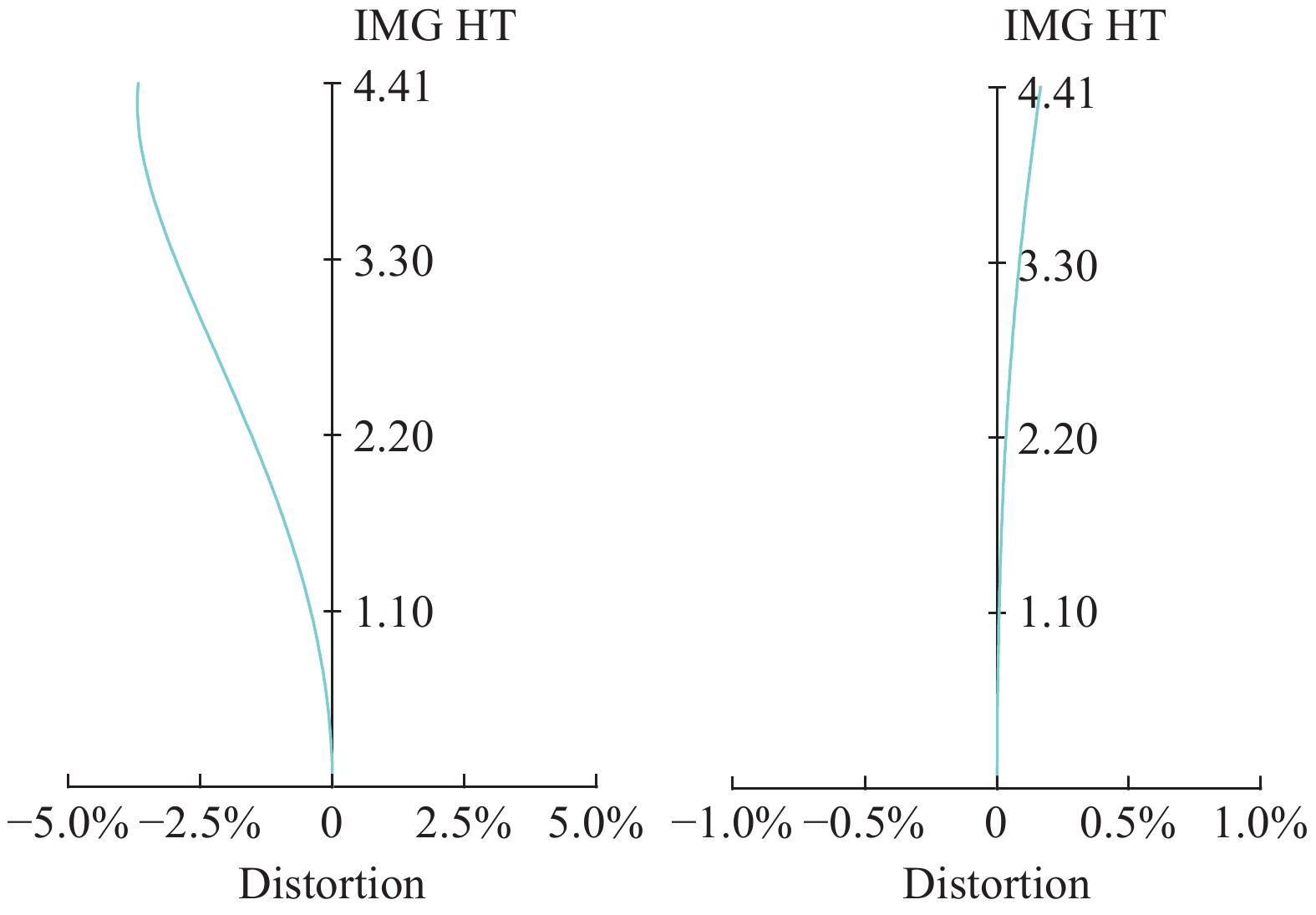
采用CodeV软件对表1中要求的光学系统进行优化分析[31]。图5和图6即为水下大视场连续变焦光学系统优化结果及对应的相对畸变和MTF评价。所述系统仅采用了七种材料,共21片透镜,单透镜最大口径不大于55 mm,窗口厚度30 mm,光学系统外表面至焦面总长218 mm,变焦行程小于52 mm,水下全视场最大相对畸变优于5%,最大倍率色差约1个像元。
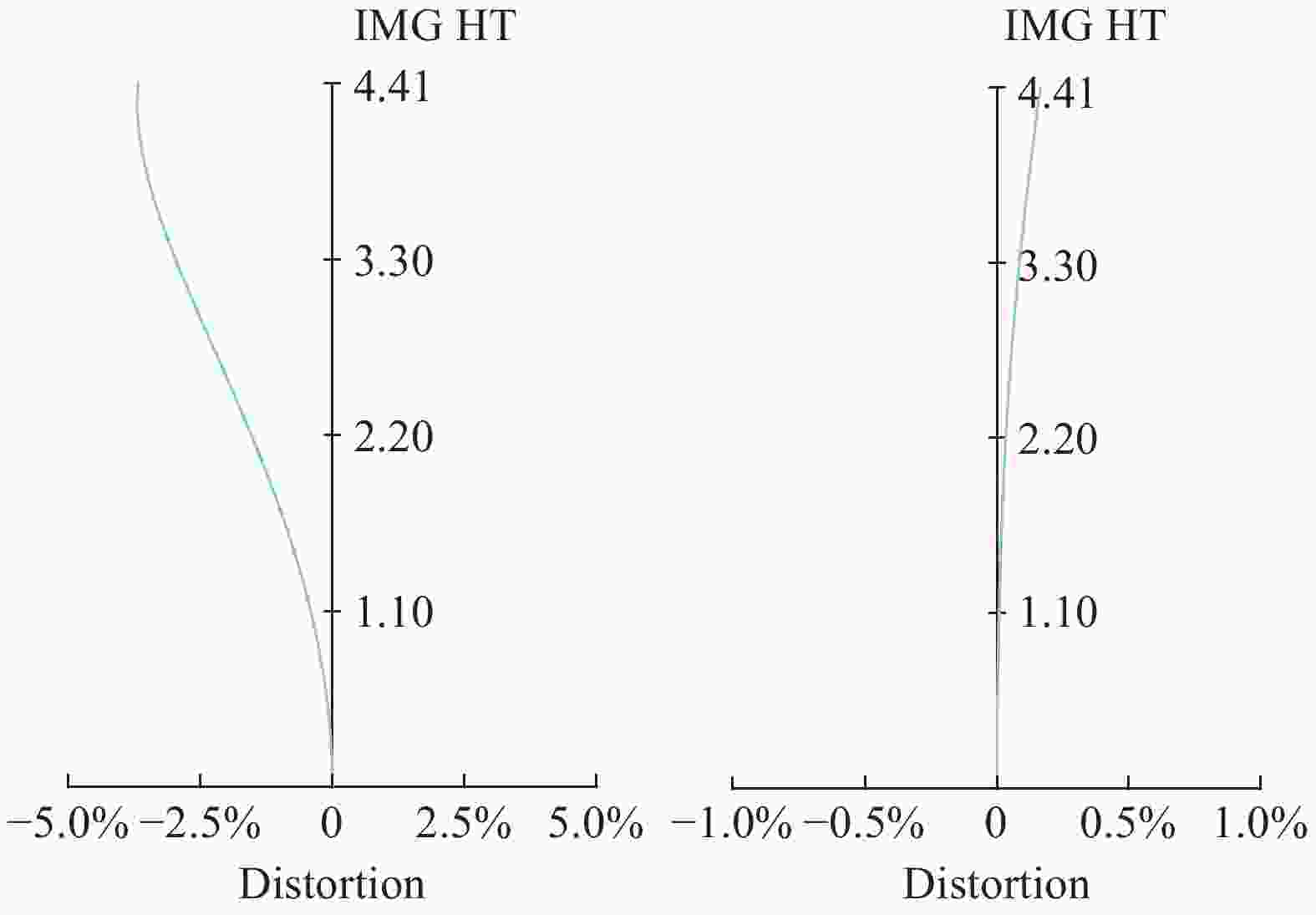
图 5 大视场水下连续变焦光学系统相对畸变评价示意图
Figure 5. Distortion performance of the underwater large FOV zoom optical system
光学系统选用三组元联动型变焦形式,采用了负组变焦-负组补偿-正组像差稳定的结构,压缩光学系统总长;前固定镜组首片具有负光焦度,采用具有高折射率高色散的HZF88材料,补偿由水下平板光窗引入的畸变和色差;调焦镜组为设置于前固定镜组中的具有正光焦度的一组胶合镜,单个镜组移动可实现对不同物距目标的清晰成像,并能保证变焦全程的一致清晰;前固定镜组单独校正了水下平板光窗引入的畸变和色差,整个变焦核中各镜组材料的选用均采用常规方法,不再赘述;另外,整个光学系统的光阑设置在中间固定镜组靠近物方侧位置,通过伺服控制,可保证变焦全程光圈恒定,并可满足对水下不同照明条件的自适应。

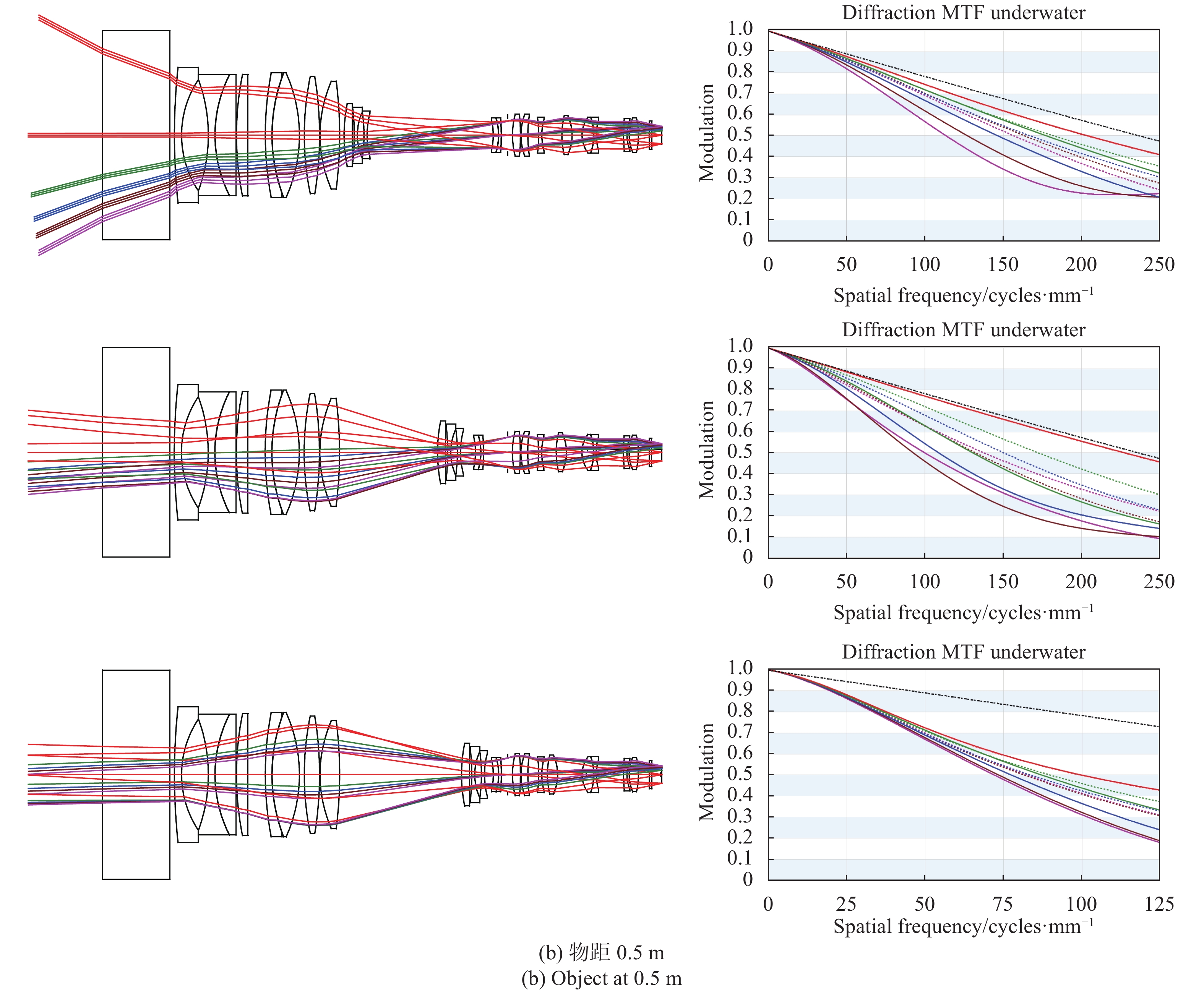
图 6 大视场水下连续变焦光学系统优化设计结果及对应的MTF评价
Figure 6. Design result of the underwater large FOV zoom optical system and corresponding MTF performance
设计完成的光学系统在各焦距位置均具有较好的成像质量:在截止频率250 lp/mm处,0.5视场内,MTF均大于0.25,其余各视场传函也具有较好分布;对0.5 m物距调焦后,长焦位置,在空间频率125 lp/mm处,0.5视场内MTF均大于0.3。利用编写的宏程序对所完成的水下大视场连续变焦光学系统进行凸轮曲线优化设计,图7即为完成优化的变焦系统凸轮曲线示意图,可以看出,整个变焦系统各动组运动平滑无拐点,也证明了上述设计方法的可行性。
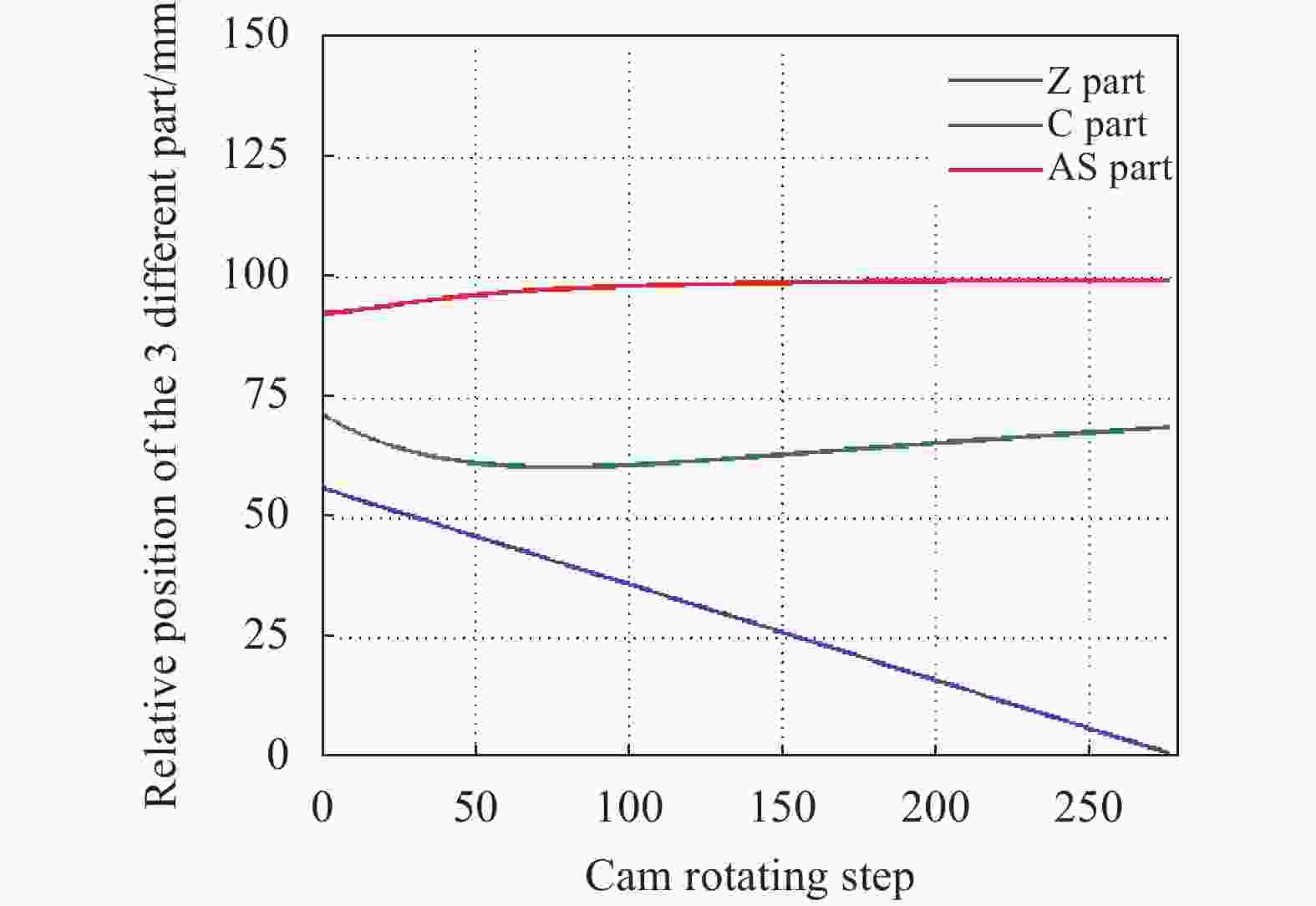
图 7 水下连续变焦光学系统凸轮曲线示意图
Figure 7. Schematic of the cam curve of the underwater zoom optical system
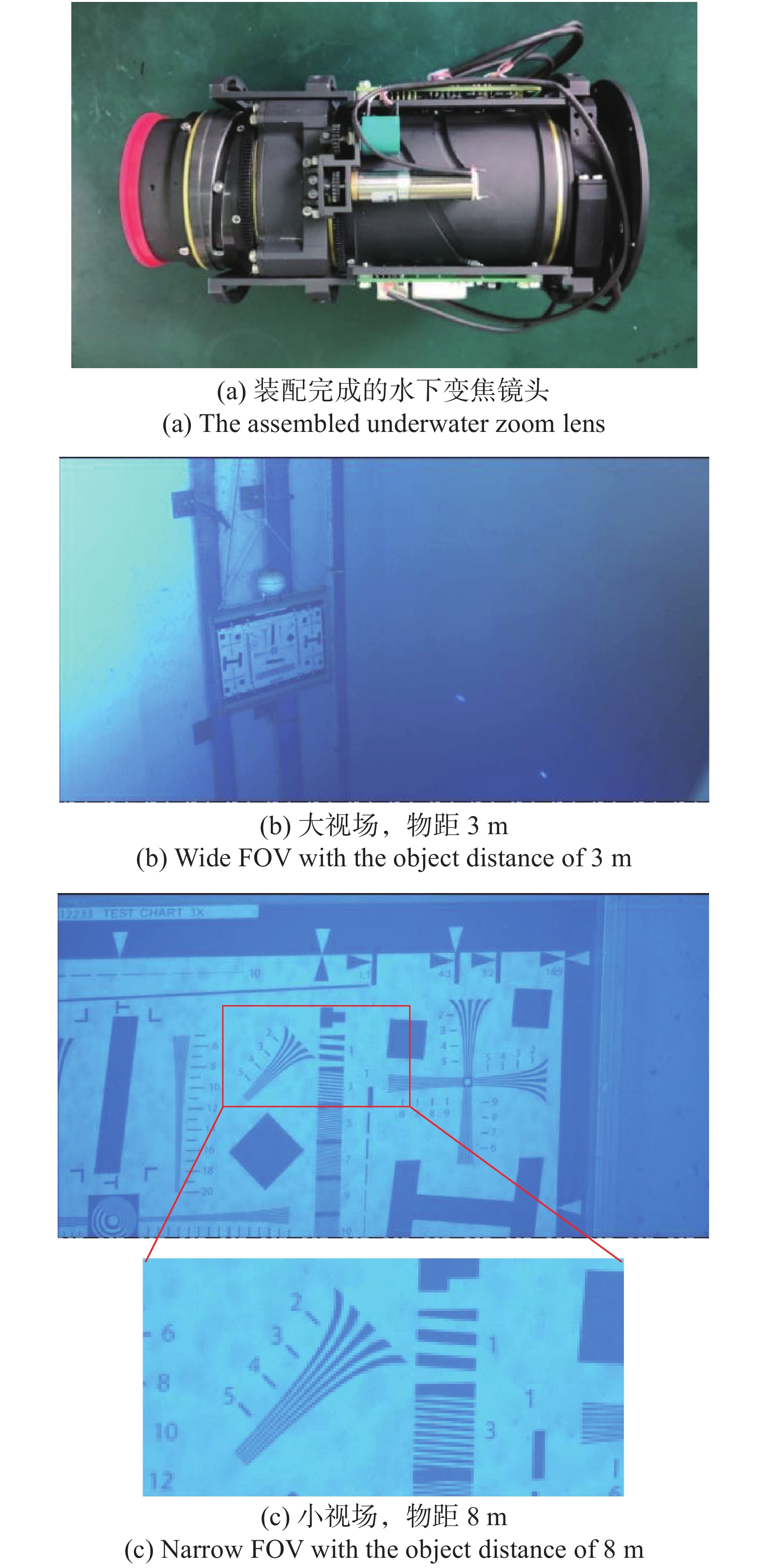
公差要求为:材料折射率公差为±0.001;阿贝数公差为±0.002;面型公差为N=3,ΔN=0.3;厚度公差为±0.02 mm;偏心公差为±0.01 mm;倾斜公差为±1′;组件与组件之间用镜筒整合,整合公差:偏心公差为±0.03 mm,倾斜公差为±1';并取调焦镜组和焦面位置作为装调补偿。装配完成的光学系统像质优良,成像效果如图8所示。其小视场0.5视场内成像分辨率可达250 lp/mm,满足任务研制需求。

图 8 连续变焦光学系统水下成像实验图
Figure 8. Image performance of the zoom optical system underwater
与现有市售水下电视成像系统相对,上述结果不仅可以实现水下4 K分辨率的10倍连续变焦,还可通过数字变焦实现1080分辨率下20倍的连续变焦功能,并可有效保证整个水下摄影过程跟调焦动作的准确完成。
-
总结了现有水下光学系统中存在的主要不足,在此基础上,针对某水下大视场连续变焦光学系统技术要求,分析了水下光窗对物镜成像性能的影响,阐述了一种三组元联动紧凑型连续变焦光学系统结构形式,并给出了水下光学系统调跟焦镜组的设置方法,为水下大视场变焦系统的实现提供了一种新的途径。作为例证,设计完成了一种4 K分辨率的水下大视场连续变焦光学系统。该系统仅使用了七种材料,实现了全视场5.9°~62°、10倍以上的连续变焦功能。系统结构紧凑,工作距离宽,具有较好公差特性,装配完成的光学系统水下成像效果优良,可望在水下监视、摄影、勘探等领域获得广泛应用。设计实例同时表明,该方法可用于类似要求的水下大视场连续变焦光学系统设计。
Design of underwater large field of view zoom optical system
-
摘要: 针对现有水下光学系统中存在的主要不足,就某大视场水下连续变焦光系统指标要求,从水下光窗选型、光窗畸变、色差等的影响入手,分析了水下平板光窗引入的相对畸变和倍率色差特性,给出了相应的应对措施。结合水下工况对包络和工作距的要求,给出了一种三组联动的变焦系统设计模型和相应调跟焦组件的设计方法;通过在PNNP型结构中引入像差稳定镜组,对动态像差做稳定和补偿,改善了光学结构的像差校正能力,同时规避了凸轮曲线断点问题;通过在物方侧镜组中设置调跟焦镜组,保证了变焦全程对近景目标的清晰成像。完成了一个4 K水下大视场连续变焦光学系统设计,该系统工作距为0.5 m~inf,设计波段为0.48~0.64 μm,采用3840×2160高灵敏CMOS面阵探测器,像元大小为2 μm,变焦全程F数最大恒定为2.8,可实现全视场5.9°~62°、10倍以上连续变焦功能,具有较短的变焦行程、平滑的变焦轨迹、优良的成像性能等优点。Abstract: Under the requirements of an underwater large field of view zoom optical system, the selection of optical window and its influence on objective lens were discussed, by which the relative distortion and lateral color induced by the plane window were analyzed and corresponding design methods were given. Regarding the special envelope and working distance requirements of the underwater optical system, a three-part zoom system design model and the design method of the corresponding focusing components were provided by introducing aberration stabilizers in the PNNP structure, dynamic aberration correction capability of the optical structure was improved, also, the problems of the cam curve breakpoints were avoided; by setting the focus lens group in the objective parts, close-range imaging through the entire zoom range was guaranteed. A 4 K underwater large field of view zoom optical system was completed using 3840×2160 high-sensitivity CMOS detector, with 0.5 m-inf working distance, 0.48−0.64 μm work waveband, constant F number of up to 2.8 and 5.9°−62° full field of view. The image quality and tolerance characters are validated by an assembled lens and its underwater imaging experiments.
-
Key words:
- ocean optics /
- underwater optics /
- zoom lens /
- large zoom ratio /
- optical design
-
图 1 两种典型水下光窗示意图
Figure 1. Schematics of two typical kind of underwater optical window structures
图 2 相对畸变随入射角变化分布示意图
Figure 2. Schematic of the change of relative distortion vs angle of incidence
图 3
${\theta }_{\rm{outF}}-{\theta }_{\rm{outC}}$ 随入射角变化分布示意图Figure 3. Schematic diagram of the change of
${\theta }_{\rm{outF}}-{\theta }_{\rm{outC}}$ vs angle of incidence
图 4 一种三组元联动变焦镜头设计模型示意图
Figure 4. Schematics of the design model of zoom lens with three linkage group
图 5 大视场水下连续变焦光学系统相对畸变评价示意图
Figure 5. Distortion performance of the underwater large FOV zoom optical system
图 6 大视场水下连续变焦光学系统优化设计结果及对应的MTF评价
Figure 6. Design result of the underwater large FOV zoom optical system and corresponding MTF performance
图 7 水下连续变焦光学系统凸轮曲线示意图
Figure 7. Schematic of the cam curve of the underwater zoom optical system
表 1 设计指标
Table 1. Design requirements
Parameter Value Work wavelength/μm 0.48-0.64 F-number 2.8-32 Diagonal field of view (DFOV)/(°) 62-5.9 Underwater distortion ≤5% Focus range 0.5 m-inf Working depth/m 11 000 Size (Without window)/mm2 ≤φ60(D)×220(L) Weight/kg ≤1.5  下载: 导出CSV
下载: 导出CSV
-
[1] Hua Dengxin, Wang Jun. Research progress of ocean laser remote sensing technology(invited) [J]. Infrared and Laser Engineering, 2018, 47(9): 0903003. (in Chinese) doi: 10.3788/IRLA201847.0903003 [2] Jin Weiqi, Wang Xia, Cao Fengmei, et al. Review of underwater opto-electrical imaging technology and equipment (II) [J]. Infrared Technology, 2011, 33(3): 125-132. (in Chinese) doi: 10.3969/j.issn.1001-8891.2011.03.001 [3] Quan Xiangqian, Chen Xiangzi, Quan Yongqian, et al. Analysis and research progress of deep-sea optical illumination and imaging system [J]. Chinese Optics, 2018, 11(2): 153-165. (in Chinese) doi: 10.3788/co.20181102.0153 [4] Jaffe J S, Moore K D, McLean J, et al. Underwater optical imaging: status and prospects[J]. Oceanography, 2001, 14(3): 66-76. [5] Thorndike E M. A wide-angle, underwater camera lens[J]. JOSA, 1950, 40(12): 823-824. [6] Bin Sen. Optical design of an underwater observation system [J]. Laser and Infrared, 1978(6): 19-22, 99. (in Chinese) [7] Zhai Xuefeng, Dong Xiaona, Wang Gufu, et al. Design of underwater zoom lens [J]. Journal of Applied Optics, 2007, 28(4): 416-420. (in Chinese) [8] Sun Chuandong, Li Chi, Zhang Jianhua, et al. Optical design of the lens for unerwater imaging system [J]. Optics and Precision Engineering, 1998, 6(5): 5-11. (in Chinese) doi: 10.3321/j.issn:1004-924X.1998.05.002 [9] Zhu Caixia, Yan Yadong, Shen Mande, et al. Low-light-level imaging system for underwater anti-terrorism [J]. Journal of Applied Optics, 2008, 29(2): 220-224. (in Chinese) [10] Xie Zhengmao, Dong Xiaona, He Junhua. Design of underwater low light photographic objective [J]. Journal of Applied Optics, 2009, 30(1): 6-10. (in Chinese) [11] Xie Zhengmao, Dong Xiaona, Cheng Lianyi, et al. Design for special underwater photography objective lens with wide angle and large relative aperture [J]. Acta Photonica Sinica, 2009, 38(4): 891-895. (in Chinese) [12] Du Ke, Cheng Xuemin, Hao Qun. Design of optical zoom system for deep-sea detection [J]. Laser & Optoelectronics Progress, 2013, 50(9): 092201. (in Chinese) [13] Ma Haikuan, Cao Xuan, Chu Dongzhi, et al. Design of underwater zoom lens for marine monitoring [J]. Laser & Optoelectronics Progress, 2017, 54(10): 100101. (in Chinese) [14] Johnson R B, Mahajan V N, Thibault S, et al. Afocal viewport optics for underwater imaging [C]//SPIE, 2014, 9192: 91920P. [15] Jiang Yang, Quan Xiangqian, Du Jie, et al. Design of deep-sea optical imaging system with wide field of view and ultra-high resolution [J]. Optics and Precision Engineering, 2019, 27(11): 2289-2295. (in Chinese) doi: 10.3788/OPE.20192711.2289 [16] Stanley E M. The refractive index of seawater as a function of temperature, pressure and two wavelengths[J]. Deep Sea Research and Oceanographic Abstracts, 1971, 18(8): 833-840. [17] Pegau W S, Gray D, Zaneveld J R. Absorption and attenuation of visible and near-infrared light in water: Dependence on temperature and salinity [J]. Applied Optics, 1997, 36(24): 6035-6046. doi: 10.1364/AO.36.006035 [18] Quan X, Fry E S. Empirical equation for the index of refraction of seawater[J]. Applied Optics, 1995, 34(18): 3477-3480. [19] Sun Chuandong, Chen Liangyi, Gao Limin, ect. Water optical properties and their effect on underwater imaging [J]. Journal of Applied Optics, 2000, 21(4): 39-46. (in Chinese) [20] Menna F, Nocerino E, Fassi F, et al. Geometric and optic characterization of a hemispherical dome port for underwater photogrammetry[J]. Sensors, 2016, 16(1): 48. [21] Menna F, Nocerino E, Remondino F. Optical aberrations in underwater photogrammetry with flat and hemispherical dome ports [C]//SPIE, 2017, 10332: 1033205. [22] Xiong Zhiqi, Deng Guoxin. Applications of glass windows in underwater optics [J]. Mine Warfare and Ship Self-defence, 2003(1): 33-36. (in Chinese) [23] Wakimoto Z. On designing underwater camera lenses[J]. Photogrammetric Engineering, 1967, 33(8): 925-936. [24] Deng Jian, Qu Rui, Huang Jianbing. Several ways to realize multi-band common aperture optical imaging system [J]. Infrared and Laser Engineering, 2020, 49(6): 20201017. (in Chinese) doi: 10.3788/IRLA20201017 [25] Warren J S. Modern Optical Engineering: The Design of Optical Systems[M]. NewYork: McGraw-Hill, Inc., 2008. [26] 曲锐, 武力, 杨洪涛, 等. 一种水下大视场连续变焦光学系统[P]. CN 110109237A. Qu Rui, Wu Li, Yang Hongtao, et al. A kind of underwater WFOV zoom lens: CN, 110109237A[P]. 2020-04-03. [27] Ellis I B, James B C, Iain A N, et al. Zoom lens system: US, 6969188B2[P]. 2005-07-29. [28] Dodoc A. Toward the global optimum in zoom lens design [C]//SPIE, 2012, 8488: 848802. [29] Neil I A. Optimization glitches in zoom lens design [C]//SPIE, 1997, 3129: 158-180. [30] 陶纯堪. 变焦距光学系统设计[M]. 北京: 国防工业出版社, 1988. Tao Chunkan. Zoom Focus Optical System Design[M]. Beijing: National Defense Industry Press, 1988. (in Chinese) [31] Optical Research Associates. Code V Reference Manual[M]. Pasadena: Optical Research Associates, 2009. -

 点击查看大图
点击查看大图

计量
- 文章访问数: 525
- HTML全文浏览量: 217
- PDF下载量: 92
- 被引次数: 0














