










-
天基探测与感知技术是目前制约我国近地轨道资源开发和防护的关键技术,对空间碎片监视、碰撞评估分析、空间情报收集等极具研究价值和军事意义。欧美等国家自20世纪70年代开始,制定了较为详细的空间目标探测计划,建立了较为完备的态势感知体系,部署了具有作战实力的各类攻防武器,我国太空资源安全已经面临前所未有的挑战[1-6]。
美国建立的地基—天基全局感知体系以及正在开发的临近感知体系,能够覆盖轨道空间所有较大尺寸目标,包括碎片、卫星、导弹、近地目标等[7-11],相关进展得益于以下技术上的创新性发展:
(1)增强探测模式的大规模应用。MSX (MidCourse Space Experiment) 可见光探测器采用多CCD拼接方法,加大了捕获目标的成功率[12]。后续的SBSS (Space-Based Space Surveillance) 万向架机动法,能够实现3π视场的捕获能力。STARE采用NANO星座技术,能够将10 cm大小的碎片交会概率评估提升到99%[13]。
(2)多种平台的协作与共享策略。2000年以前,对于低地球轨道 (Low Earth Orbit,LEO) ≥10 cm、GEO≥1 m空间较大碎片和卫星的观测、编目主要依靠地基雷达和光电设备完成。2000年以后,随着天基监视网广泛建立起来,逐步搭建了广域监视告警系统,将访问时间最短缩到24 h内,最慢可在几天内完成捕获[14-15]。为避免微小目标的频繁碰撞,国际空间站等大型空间设施装备了专属的SDS(Space Debris Sensor)系统,可对周围的目标进行全域感知,对我国空间站的安全发展提供了有效策略[16-17]。
(3)核心算法上的突破性进展。经过多年的技术积累,欧美在不同观测模式下星点提取取得突破,包括恒星跟踪和目标跟踪模式。由此地基和天基设施将探测器性能发挥到极致,可支撑各种探测模式[18-20]。
(4)算法的硬件化加速了产品迭代流程。T. Yanagisawa等提出的基于FPGA的堆栈法,较软件方法耗时降低上千倍[20]。除使用FPGA做硬件流水提取外,P. C. Zimmer等提出GPU加速技术通过并行处理多帧多区域数据[21]。
(5)特性测量研究的深入与工程化发展。综合各种测量手段,进行数据融合,实现对目标特性的详尽分析与精细化测量,积极搜集对战场极具价值的情报信息,对保护轨道资源、实时精确对准意义重大,也是空间力量进入实战的有效前提[22-24]。
更小、更暗、更精、更专、效率更高是目前空间目标探测的主导方向[25-29]。对于我国,空间微小目标的探测识别、编目定轨技术仍然是瓶颈技术。为提升微小目标探测能力,视场覆盖能力、探测灵敏度、探测效率、探测精度、目标探测概率等主要指标要求很高。然而,探测器拍摄的星图是个复杂的背景。要观测10 cm@1 000 km目标,预计灵敏度达到12 Mv以上,银道区域内1°视场内恒星有200颗以上;而要观测1 cm@1 000 km目标,灵敏度要达到17 Mv,1°视场内恒星4 000颗以上。可知,目标越小、探测距离越长,则灵敏度要求越高,而视场越大恒星越稠密,背景越复杂,这些情况对数据处理速度提出了严峻挑战[6, 9, 29]。
为提升灵敏度,并解决高灵敏度密集星场下的空间目标探测问题,文中首先给出高灵敏度探测的若干问题,研究高密度星场在线处理问题硬件流水线解决方法,提出基于目标运动特性的空间目标证认方法,最后通过以研制的样机进行试验和分析,验证方法的可行性和可靠性。
-
以灵敏度(14 Mv)、视场(15°)为例,像平面的平均星数接近58 000颗,如表1所示。像平面将充斥大量恒星,背景不仅包括暗黑的天空背景,还包括由恒星散射光造成的整个像面的不均匀分布,这对恒星目标的提取、剔除,进而捕获目标提出重大挑战。
表 1 星数与不同星等、视场之间的关系
Table 1. Stellar population for different magnitude and field of view
Item Magnitude ≤7.0 ≤8.0 ≤10 ≤11 ≤12 ≤13 ≤14 Star number in 4π space 12 890 38 082 297 267 776 664 1 933 747 4 614 474 10 586 016 Average star number in ${15^ \circ }$ 70.3 207.7 1 621.3 4 236 10 547 25 168 57 738 即使采用硬件流水技术加速星点提取,目标提取同样存在问题。如图1所示,对于灵敏度更高的天基设施,虽然运行过程中只对某参数进行了微弱调整,却导致背景提取目标数出现大范围波动,与常规星敏感器星点提取特征相差较大。

图 1 提取的点目标数目变化(22:40对某参数微调,23:00参数调回原值)
Figure 1. Variety in star extraction number(with a changed value for one important parameter at 22:40, and be back to its original value at 23:00)
-
空间目标形貌复杂,材料特性未知,为计算其光学特性,一般会采用简化模型,将其等效为规则形貌的漫反射体。如图2所示,在O-XYZ本体坐标系中,目标的单位矢量与Z轴夹角为
$\varphi $ ,与X轴夹角为$\theta $ ,太阳矢量方向沿着Y轴方向,目标单位矢量与太阳矢量的夹角为$\vartheta $ ,太阳矢量与观测矢量夹角为$\gamma $ ,与观测矢量的夹角为$\beta $ ,与观测平台的距离为$L$ ,目标的漫反射率为${\sigma _{{s}}}$ ,不考虑地球散射光的影响,则空间目标在观测平台处产生的可见光照度为:
图 2 空间目标在观测相机处幅照度示意图
Figure 2. Diagram of the luminance of a space target at the observation camera site
$${E_{ob}} = {\left( {\pi {L^2}} \right)^{ - 1}}{E_{sun}}\int\limits_0^{2\pi } {\int\limits_0^\pi {{\sigma _s}{r^2}\sin \varphi \cos \vartheta \cos \beta d\varphi d\theta } } ,\vartheta ,\beta \leqslant 90°,$$ 在同样敏感器配置下,E0为零等星的能量,则空间目标的等价星等可通过下式得到:
$$m = - 2.512 \times \log \left( {\frac{{{E_{{\rm{ob}}}}}}{{{E_0}}}} \right)$$ (1) 探测距离与星等的关系
设目标漫反射率
${\sigma _{{s}}}{\rm{ = }}0.2$ ,太阳与观测平台夹角$\gamma {\rm{ = }}{0^ \circ }$ ,空间目标大小10 cm球体,可获得不同观测距离与星等的关系如表2所示。表 2 空间目标不同观测距离与星等之间的关系
Table 2. Visual magnitude of space targets at different observation distances
Item Value Range L/km 800 900 1 000 1 100 1 200 1 300 1 400 Magnitude 10.48 10.74 10.97 11.18 11.37 11.54 11.70 (2) 目标相位角与星等的关系
亮度特征与距离有关,假设卫星轨道高度600 km,空间目标为10 cm球体,目标漫反射率
${\sigma _{{s}}} = 0.2$ ,固定距离L = 1 400 km,目标相位角(太阳视线与观测视线的夹角)与星等之间的关系如表3所示。表 3 空间目标不同的相位角与星等之间的关系
Table 3. Visual magnitude of space target for different solar exclusive angle
$\gamma $ 0 10 20 30 40 50 60 70 80 90 Magnitude 11.99 12.14 12.20 12.24 12.28 12.32 12.40 12.52 12.70 12.95 实际上,空间目标包括平面、球面、圆锥面、不规则几何等多种复杂形貌。除上述因素外,空间目标的姿态、表面材料性质等是另一大因素,不同材质的散射特性非常不同,可以预知,相同的太阳入射场景,其不同方向的目标辐射亮度也将不同。可见,复杂的光变曲线、目标凌星、探测器固有缺陷导致的高亮瞬态噪点等这些探测的固有因素,给目标身份的确定、目标长时关联带来巨大困难。
-
为解决更高灵敏度在线处理问题,大容量并行处理技术有望应用于目标探测和态势感知领域。有以下优势:(1)当出现多个探测单元时,GPU可分核处理单个单元;(2)当出现大规模并行运行程序时,可分线程处理。GPU技术主要功能是处理复杂耗时的算法,完成姿态识别和运动目标的捕获跟踪。高精度高效率星表设计将协助多目标识别与跟踪模块实现真实运动目标的识别。而FPGA主要负责星图预处理,包括3项任务:(1)噪声滤波,采用高斯核滤波器对图像背景进行平滑处理;(2)背景估计,选择合适的窗口剔除无效像元,计算窗口均值与均方根;(3)像素点聚类和质心计算,设原始灰度值为
${g_{i,j}}$ ,计算得到区域图像阈值为$mean + \kappa \cdot \sigma $ ,当${g_{i,j}} > mean + \kappa \cdot \sigma $ 时,该像元为高亮像元,依据四连通邻域内必存在其他属于该星点的像元的原则,将有效像元中属于某星点的像元聚类为一组,然后计算质心输出。 -
针对不同的类别进行特别处理,直到最终将目标提取出来,可划分为以下几类进行处理:
(1)恒星背景。利用恒星在天球坐标系内不动的特点,可以将其剔除,另外一部分亮星可以用作导航星,输出姿态。
(2)运动目标。运动目标的成像特性与恒星相同,在单帧图像中可提取,但无法识别;运动目标可能包括多个,需利用目标不同的特性,如运动速度、面积大小、星等大小等不同的特点,进行计算。通过多帧比对,根据目标相对于恒星背景运动的信息进行识别和分类。
(3)探测器固有因素。探测器缺陷处会存在高亮噪点,根据其不动的特性将其去除,探测器在一些位置会产生大量的瞬态点,可以根据其杂乱无章、不能持续的特性将其去除。
-
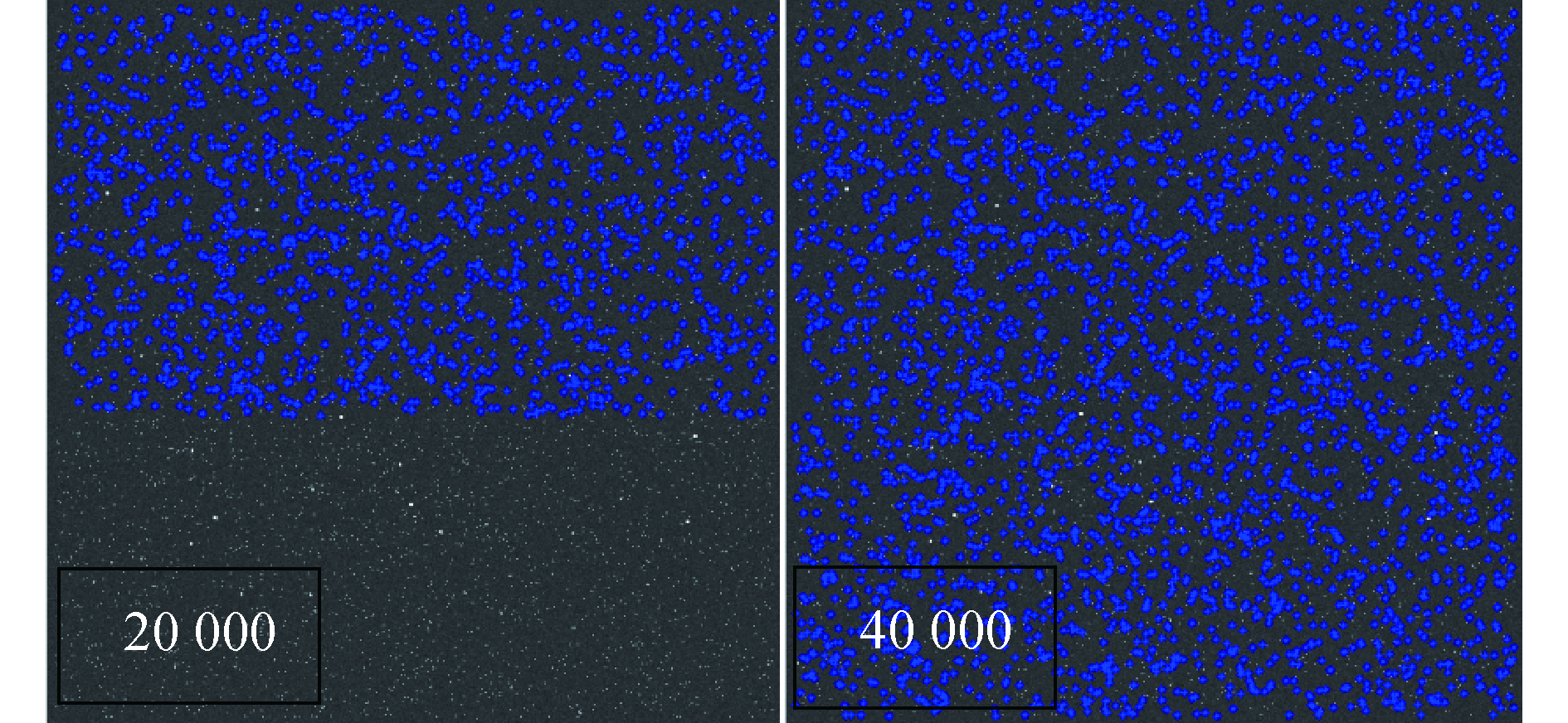
FPGA完成整幅星图的预处理,点源提取等任务,提取结果见图3。如图3所示,当FPGA资源量从5 000增长到40 000时,实际处理的星图面积也从1/8提升到1,说明背景恒星较多时,较少的FPGA资源难以满足星图处理需求。

图 3 不同滤除像素点对应有效提取的星点数
Figure 3. Effective extraction star number of different filtered pixels
-
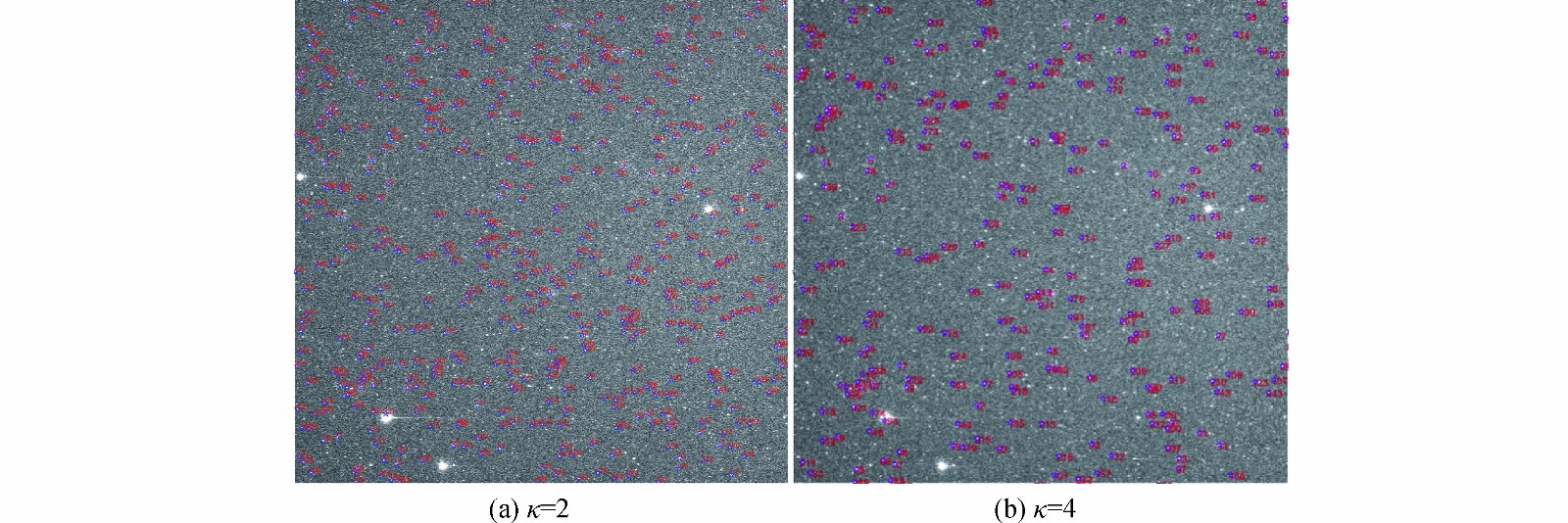
拍摄真实的夜空图,提取像元数与提取星数之间的关系参见表4,不同的背景参数
$\kappa $ (参见2.1节)实施效果参见图4。表 4 不同背景参数所达到的提取指标
Table 4. Outcomes for different sets of background parameter κ
$\kappa $ Extracted pixels Extracted stars Average pixels per star Star number Extraction probability 4 4 453 251 17.74 507 49.50% 3.5 5 237 283 21.14 507 55.80% 3 6 361 327 19.45 507 64.49% 2.5 8 602 407 18.51 507 80.27% 2 13 883 500 17.74 507 98.6% 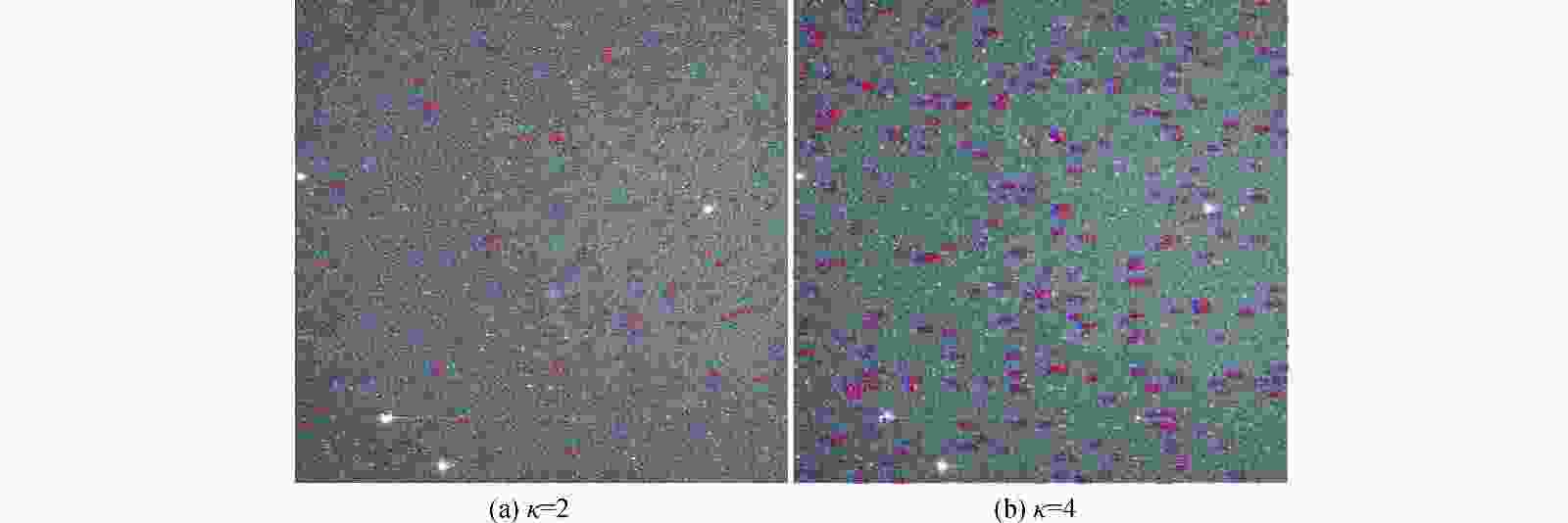
图 4 提取的星点数效果图
Figure 4. Diagram of extracted star number
由图4可知,当
$\kappa = 2$ 时,能将图中500颗恒星提出,提取成功率达到98.6%。但同时看到,需要提取上万像素点才能达到上述要求,这对星载资源处理提出了重大挑战。 -
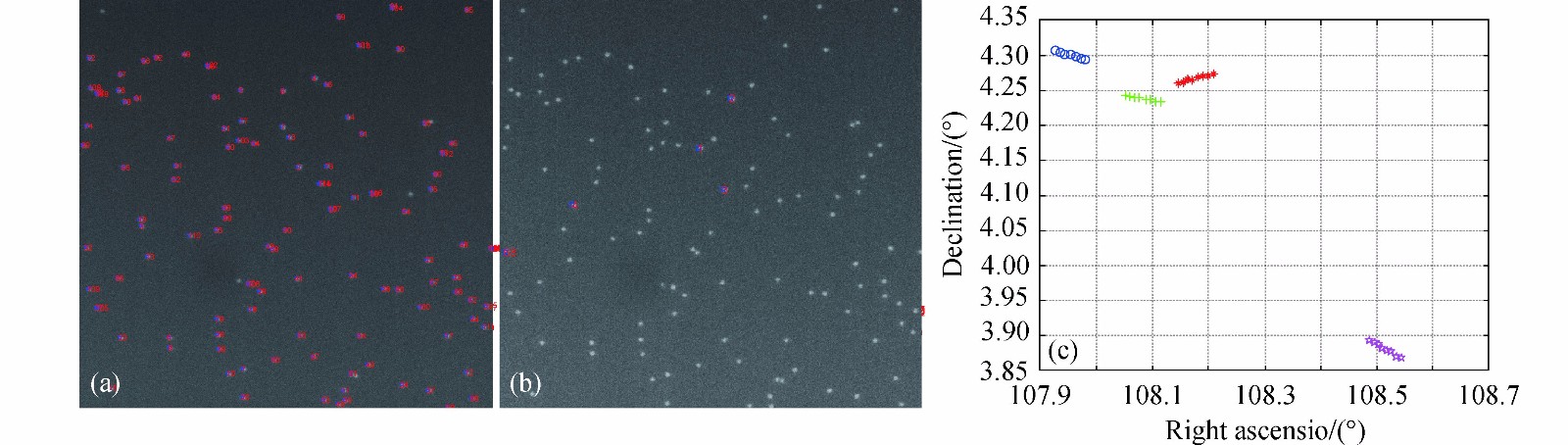
原始图像及处理结果参见图5,图(a)为原始图像,图(b)为目标图像,图(c)为证认后的目标轨迹。有效提取的7个疑似目标中,对应图(b),绿色(1),蓝色(2),红色(3),紫色(4)是真实的运动目标,已经被有效提取,对于其他干扰点,则全部滤除。

图 5 原始图像、提取的目标图、认证和跟踪算法后提取的目标轨迹(其中,绿色(1),蓝色(2),红色(3),紫色(4))
Figure 5. Original image, extracted target image and its trajectory after certification and tracking algorithm
-
研制了具有高灵敏度目标探测功能的载荷并进行了地面试验,获得了不同天区星图和空间目标数据。地面星图经UCAC星表进行分析,灵敏度接近14 Mv,参见图6。
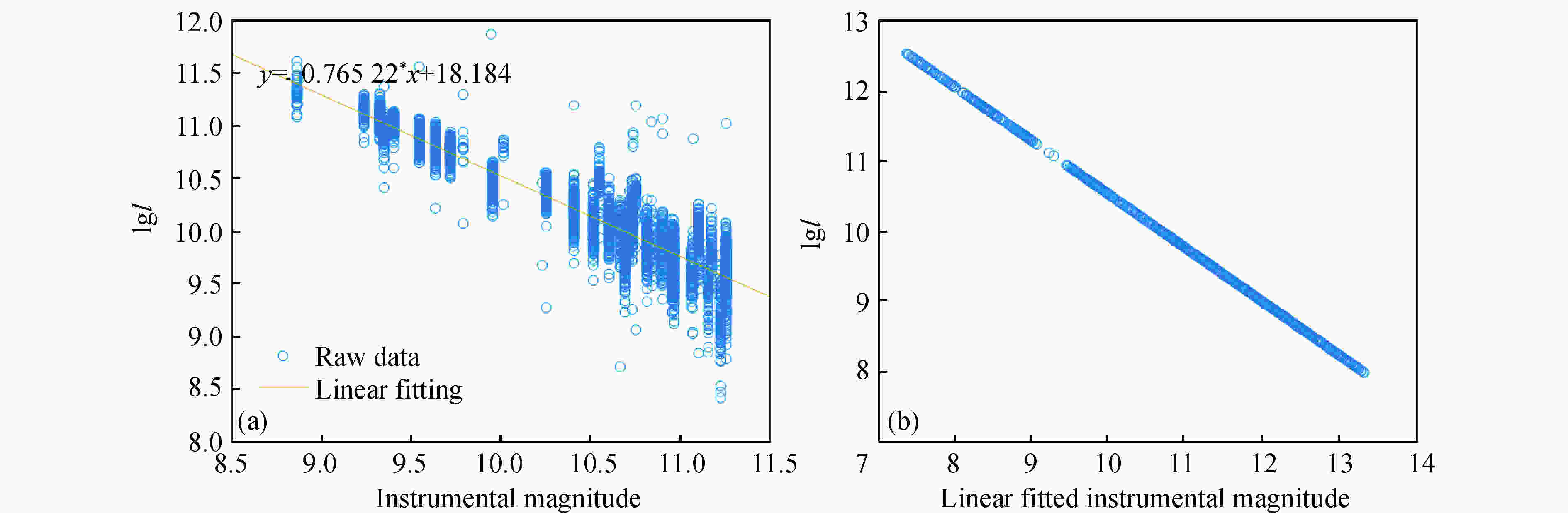
图 6 地面目标探测的灵敏度分析
Figure 6. Sensitivity analysis for on-ground object detection
图7为拍摄的运动目标图像(包括4颗目标),经过处理后的结果参见图7(a),运动目标的识别结果参见图7(b)。由图7可知,图像中的4个目标全部被识别出来,对于中间轨迹中断、速度畸变情况,轨迹关联做了较好处理,能够将多次断连的轨迹关联起来。

图 7 地面目标探测的处理结果
Figure 7. Processing results for on-ground object detection
-
目标观测形貌、相位可变性,稠密星云背景,目标凌星现象导致空间目标提取较难,突破空间目标提取技术是走向应用和工程化的难点之一。文中提出空间目标证认关联技术,将大部分星表不能覆盖的恒星大部分剔除,基于目标自身的运动特性对目标进行了识别与分类,达到了长时关联的目标。分别对不同的天基背景进行了仿真建模和地面观星试验,结果表明,文中提出的方法可正确完成轨迹关联处理,滤除干扰因素,100%的提取空间运动目标。研制的试验载荷进行了性能验证,灵敏度接近14 Mv,可实时捕获跟踪目标,全面验证了前述方法,为我国天基目标监视、系内行星探测打下了良好基础。
High sensitive automatic detection technique for space objects
-
摘要: 在线捕获GEO远距离暗弱目标,实时监视轨道目标状态对于空间安全具有越来越重要的意义。在灵敏度接近14 Mv情况下,密集恒星、恒星散射光效应将极大影响目标探测。为解决上述问题,提出一种背景稠密恒星同步剔除和空间目标证认方法,利用目标短时间内规律运行的特征,实现目标的捕获、分类和在线跟踪,地面仿真和试验充分验证了方法的有效性和准确性。文中方法对于太阳系内行星、小行星探测等深空项目亦具有重要的借鉴意义。Abstract: In orbit capturing and real-time monitoring the status of distant dimmer space targets is of vital importance for space safety. However, when the sensitivity approaches 14 magnitude, the intensive stellar population, the stellar scattering light will reduce the detection efficiency greatly, resulting in a limited detection range and ability. To solve this problem, a simple method for space object capturing, classification and online tracking was presented, synchronously eliminating the dense background stars and sequentially extracting the possible space targets, utilizing the regular motion of a moving object in a short timespan. Ground simulations and tests validate the effectiveness and accuracy of the method. It seems that this method can also be used as a basic function for deep space projects, such as asteroid and planet exploration in the solar system.
-
图 1 提取的点目标数目变化(22:40对某参数微调,23:00参数调回原值)
Figure 1. Variety in star extraction number(with a changed value for one important parameter at 22:40, and be back to its original value at 23:00)
图 2 空间目标在观测相机处幅照度示意图
Figure 2. Diagram of the luminance of a space target at the observation camera site
图 3 不同滤除像素点对应有效提取的星点数
Figure 3. Effective extraction star number of different filtered pixels
图 5 原始图像、提取的目标图、认证和跟踪算法后提取的目标轨迹(其中,绿色(1),蓝色(2),红色(3),紫色(4))
Figure 5. Original image, extracted target image and its trajectory after certification and tracking algorithm
表 1 星数与不同星等、视场之间的关系
Table 1. Stellar population for different magnitude and field of view
Item Magnitude ≤7.0 ≤8.0 ≤10 ≤11 ≤12 ≤13 ≤14 Star number in 4π space 12 890 38 082 297 267 776 664 1 933 747 4 614 474 10 586 016 Average star number in ${15^ \circ }$ 70.3 207.7 1 621.3 4 236 10 547 25 168 57 738  下载: 导出CSV
下载: 导出CSV
表 2 空间目标不同观测距离与星等之间的关系
Table 2. Visual magnitude of space targets at different observation distances
Item Value Range L/km 800 900 1 000 1 100 1 200 1 300 1 400 Magnitude 10.48 10.74 10.97 11.18 11.37 11.54 11.70
下载: 导出CSV
表 3 空间目标不同的相位角与星等之间的关系
Table 3. Visual magnitude of space target for different solar exclusive angle
$\gamma $ 0 10 20 30 40 50 60 70 80 90 Magnitude 11.99 12.14 12.20 12.24 12.28 12.32 12.40 12.52 12.70 12.95
下载: 导出CSV
表 4 不同背景参数所达到的提取指标
Table 4. Outcomes for different sets of background parameter κ
$\kappa $ Extracted pixels Extracted stars Average pixels per star Star number Extraction probability 4 4 453 251 17.74 507 49.50% 3.5 5 237 283 21.14 507 55.80% 3 6 361 327 19.45 507 64.49% 2.5 8 602 407 18.51 507 80.27% 2 13 883 500 17.74 507 98.6%
下载: 导出CSV
-
[1] Liu Yongzheng, Liu Xuebin. Study on the ability of U. S. space situation awareness [J]. Aerospace Electronic Warfare, 2008, 25(3): 1−3. (in Chinese) [2] Gong Zizheng, Li Ming. The giant collision of US-Russia satellites in space and its influences on spaceflight activities [J]. Spacecraft Environment Engineering, 2009, 26(2): 101−106. (in Chinese) [3] Gong Zizheng, Han Zengyao, Pang Baojun. A review of studies on protection against M/OD [J]. Spacecraft Environment Engineering, 2010, 27(1): 13−21. (in Chinese) [4] Gao Lin, Liu Hejun, Song Yaodong. Present status and development trends of space attack and defense equipment of USA [J]. Electronic and Electro Optical Systems, 2009(2): 43−46. (in Chinese) [5] Li Ming. Progress of space debris research in China [J]. Spacecraft Engineering, 2017(5): 1−5. (in Chinese) [6] Li Ming, Gong Zizheng, Liu Guoqing,. Frontier technology and system development of space debris surveillance and active removal [J]. Chinese Science Bulletin, 2018, 63(63): 2570. (in Chinese) [7] Su Xiancheng, Yu Xiaohong, Liu Zhenxin. Analysis of the fevelopment of US dpace dituation swareness [J]. Journal of the Academy of Equipment Command & Technology, 2010, 21(2): 42−46. (in Chinese) [8] Lu Zhen. History and dtatus of US dpace dituational swareness [J]. Journal of Ordnance Equipment Engineering, 2016, 37(1): 1−8. (in Chinese) [9] Zhong Hongjun, Zhang Jun, Liang Shitong, et al. Space-based technology of long range wide-field-of-view detection, identification and tracking for space debris [J]. Space Debris Research, 2019, 4: 5−10. (in Chinese) [10] Utzmann J, Wagner A, Blanchet G, et al. Architectural design for a european SST system. 6th european conference on space debris[C] 2013. [11] Kennewell J A, Vo B N. An overview of space situational awareness. Information Fusion[C]//2013 16th International Conference on. IEEE, 2013: 1029-1036. [12] Sharma J, Stokes G H, von Braun C, et al. Toward operational space-based space surveillance [J]. Lincoln Laboratory Journal, 2002, 13(2): 309−334. [13] Felicetti L, Emami M R. Spacecraft formation for debris surveillance[C]// Aerospace Conference, IEEE, 2017: 1-12. [14] Flohrer T, Peltonen J, Kramer A, et al. Space-based optical observations of space debris[C]//4th European Conference on Space Debris, 2005, 587: 165. [15] Flohrer T, Schildknecht T, Musci R. Proposed strategies for optical observations in a future European Space Surveillance network [J]. Advances in Space Research, 2008, 41(7): 1010−1021. doi: 10.1016/j.asr.2007.02.018 [16] Krause L H, Minow J I, Coffey V N, et al. The situational awareness sensor suite for the ISS (SASSI): A mission concept to investigate ISS charging and wake effects[C]//13th Spacecraft Charging Technology Conference (SCTC), 2014: 3478. [17] Christiansen E L, Hyde J L, Bernhard R P. Space shuttle debris and meteoroid impacts [J]. Advances in Space Research, 2004, 34(5): 1097−1103. doi: 10.1016/j.asr.2003.12.008 [18] Marchant J M, Green S F, Dick J S B. Algorithm for optical real-time ground-based space debris detection [J]. Advances in Space Research, 1997, 19(2): 233−236. doi: 10.1016/S0273-1177(97)00006-9 [19] Schildknecht T, Hugentobler U, Verdun A. Algorithms for ground based optical detection of space debris [J]. Advances in Space Research, 1995, 16(11): 47−50. doi: 10.1016/0273-1177(95)98752-A [20] Yanagisawa T, Kurosaki H, Banno H, et al. Comparison between four detection algorithms for GEO objects[C]// Proceedings of the Advanced Maui Optical and Space Surveillance Technologies Conference. 2012, 1114: 9197. [21] Zimmer P, McGraw J T, Ackermann M R. Affordable wide-field optical space surveillance using sCMOS and GPUs[C]//Advanced Maui Optical and Space Surveillance Technologies Conference, 2016: 25. [22] Cardona T, Seitzer P, Rossi A, et al. BVRI photometric observations and light-curve analysis of GEO objects [J]. Advances in Space Research, 2016, 58(4): 514−527. doi: 10.1016/j.asr.2016.05.025 [23] Seitzer P, Abercromby K, Barker E, et al. Optical studies of space debris at GEO-survey and follow-up with two telescopes[C]//8th Air Force Maui Optical and Supercomputing (AMOS) Technical Conf. Wailea, Maui, Hawaii, 2007: 10-14. [24] Zhang Zhongping, Zhang Haifeng, Deng Huarong, et al. Experiment of laser ranging to space debris by using two receiving telescopes [J]. Infrared and Laser Engineering, 2016, 45(1): 0102002. (in Chinese) doi: 10.3788/irla201645.0102002 [25] Gao Yang, Zhao Jinyu, Liu Junchi, et al. Ground_based photoelectric surveillance for mid--high orbit target [J]. Optics and Precision Engineering, 2017, 25(10): 2584−2590. (in Chinese) doi: 10.3788/OPE.20172510.2584 [26] Sun Rongyu, Zhao Changyin. Optical survey technique for Sspace debris in GEO [J]. Progress in Astronomy, 2012, 30(3): 394−410. (in Chinese) [27] Zhang Chen, Ping Yiding. Object recognition method of space debris tracking [J]. Acta Astronomica Sinica, 2015, 56(5): 506−515. (in Chinese) [28] Li Zhenwei, Zhang Tao, Zhang Nan, et al. High precision orientation of faint space object [J]. Optics and Precision Engineering, 2015, 23(9): 2627−2634. (in Chinese) doi: 10.3788/OPE.20152309.2627 [29] Luo Hao, Mao Yindun, Yu Yong, et al. A method of GEO targets recognition in wide-field opto-electronic telescope observation [J]. Opto-Electronic Engineering, 2017, 44(4): 418−421. (in Chinese) -

 点击查看大图
点击查看大图
计量
- 文章访问数: 2360
- HTML全文浏览量: 1382
- 被引次数: 0


















