









-
为了实现更高的成像分辨率与探测灵敏度,望远镜的口径越来越大,目前地基望远镜口径已达到30 m级[1],太空望远镜口径已达到6 m级[2]。随着光学设备口径的增大,对系统装调与检测提出了更高的要求。传统的装调机构和设备,例如Keck望远镜所采用的往复式运动机构,这种方式虽然运动稳定、控制简单,但通用性较差,无法应对目前越来越复杂的装调场景。
基于机械臂结构设计的具有解决复杂问题能力的可变形机构可被统一称为“可变智能桁架”,与传统被动桁架结构相比具有高刚度、多自由度、运动灵活等优势,具体来说:(1)少自由度智能桁架系统可直接作为光学系统结构组件的一部分,即采用“可变智能桁架”代替传统桁架降低系统的复杂性;(2)可实现极端环境的无人远程光学集成,如南极穹顶A[3],月球空间站[4],哈勃空间望远镜HST[5]。可适应高可变度工作,结合迁移学习与终生学习等人工智能技术可实现自我的任务规划;(3)通过不同精度执行机构的捷联,可兼顾大调节跨度与高精度调整。
可变智能桁架从自由度可分为少自由度、六自由度与冗余自由度结构,从实现功能上可分为望远镜嵌合式可变智能桁架和可变智能桁架辅助装调。其中,望远镜嵌合式可变智能桁架主要实现既定的功能与运动,而可变智能桁架主要面对辅助装调可变任务。
传统机械臂大多仅拥有内部的度量系统,为实现可变智能桁架所预设的目标,仅依靠内部度量系统,其末端执行系统的精度将难以保证。从机构学的角度看,串联型机构的精度是逐关节损失的,单纯提高机械精度很难满足光学波长级别的调整要求。为完成可变智能桁架的预设目标,需要设立额外的反馈手段,目前主流方法主要可分为机器视觉、坐标测量、波前传感等。
因此文中对基于机械臂形式的可变桁架进行了调研,总结了现有桁架在不同领域的各种应用,介绍了其性能指标并总结了优缺点,并对可变桁架的未来发展趋势进行了展望。
-
为了解决运载火箭内部空间的问题,采用可展开结构将望远镜放入运载火箭是克服运载能力限制的主要手段,通过少自由度的可变桁架方案降低了对航天器和光学设备的设计和装调要求。将传统的桁架结构改为可变的次镜桁架结构,可压缩运载空间。
在此介绍几个典型的应用可变桁架的望远镜和其展开桁架的形式,并对其中的技术细节进行了分析与总结。
-
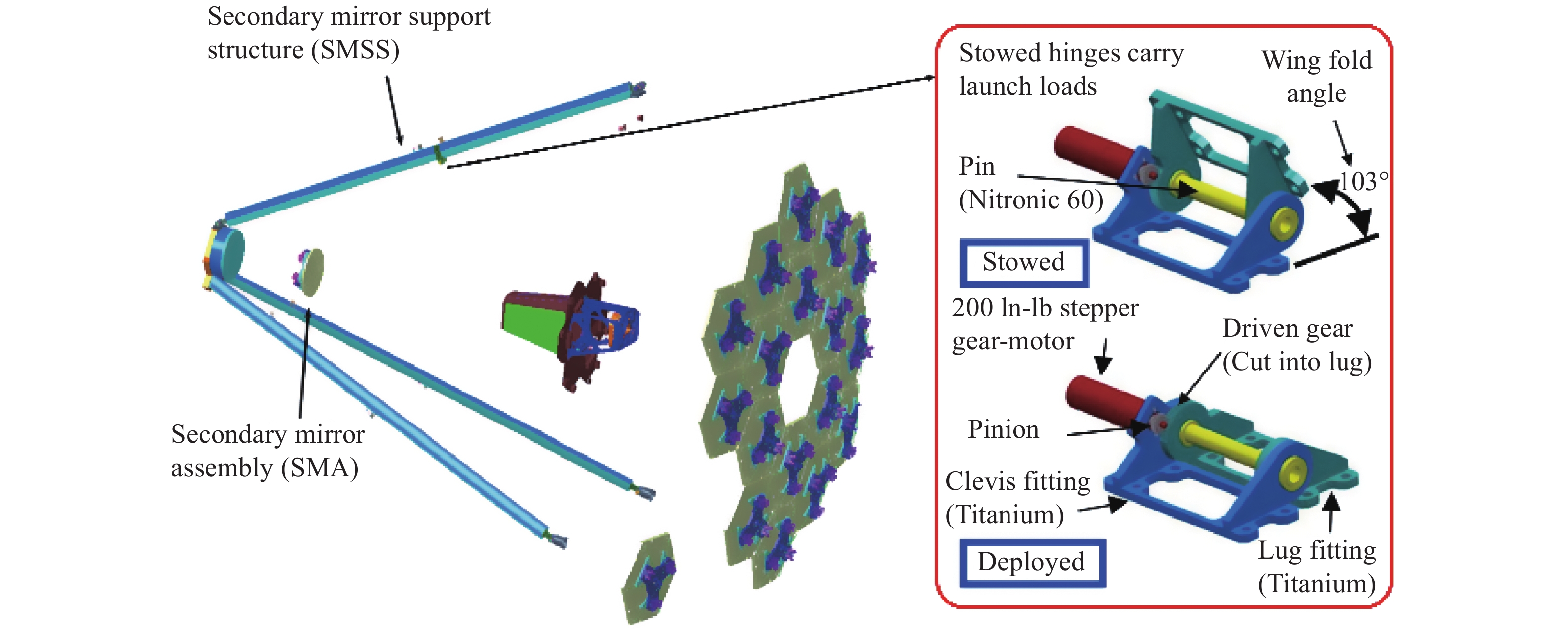
詹姆斯韦伯空间望远镜(James Webb Space Telescope, JWST)是NASA主导的新一代空间望远镜系统,其可变次镜桁架(Secondary Mirror Support Structure,SMSS)设计为可展开的三脚支架形式,通过四个铰链实现了折叠与展开的功能。当望远镜入轨后,通过步进电机驱动使铰链进行解锁,提供超过22.5 Nm的扭矩,驱动可变智能桁架展开;当桁架展开后,再通过铰链对其限位并锁定形成刚性杆。其中,铰链的结构如图1所示[6-7],SMSS为可变次镜桁架,SMA为次镜组件,通过桁架中的铰链可实现展开并锁紧。
锁紧机构的设计是通过内侧和外侧铰链构成的。通过旋转销来提供展开精度,通过夹紧销进行锁紧并提供10倍于操作负载的承载能力。锁紧机构的设计细节如图2所示。
SMSS中的铰链在锁紧时将系统中的应力降至最低。展开后SMSS五个铰链均锁定,但中间铰链是唯一的预装限位铰链。剩余的四个锁紧装置利用其铝件的热收缩功能在冷却至工作温度期间将其固定在适当的位置,因此它们可以在任意旋转角度进行闩锁,通过挡块实现平面与球面接触,基于运动学原理实现桁架高精度的定位精度,以达到光学设计中主次镜相对位置的要求。
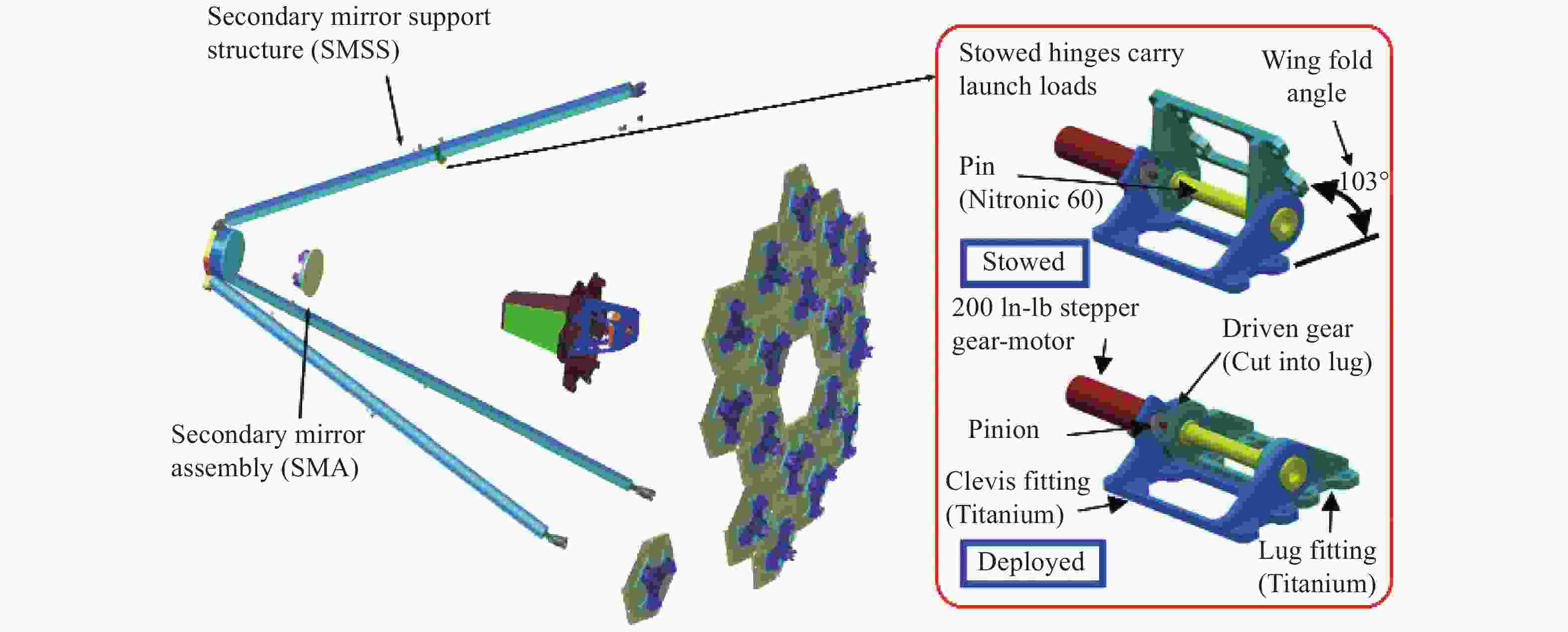
图 1 JWST桁架铰链结构
Figure 1. JWST hinge structure of the truss

图 2 JWST桁架锁紧机构
Figure 2. JWST locking mechanism of the truss
-
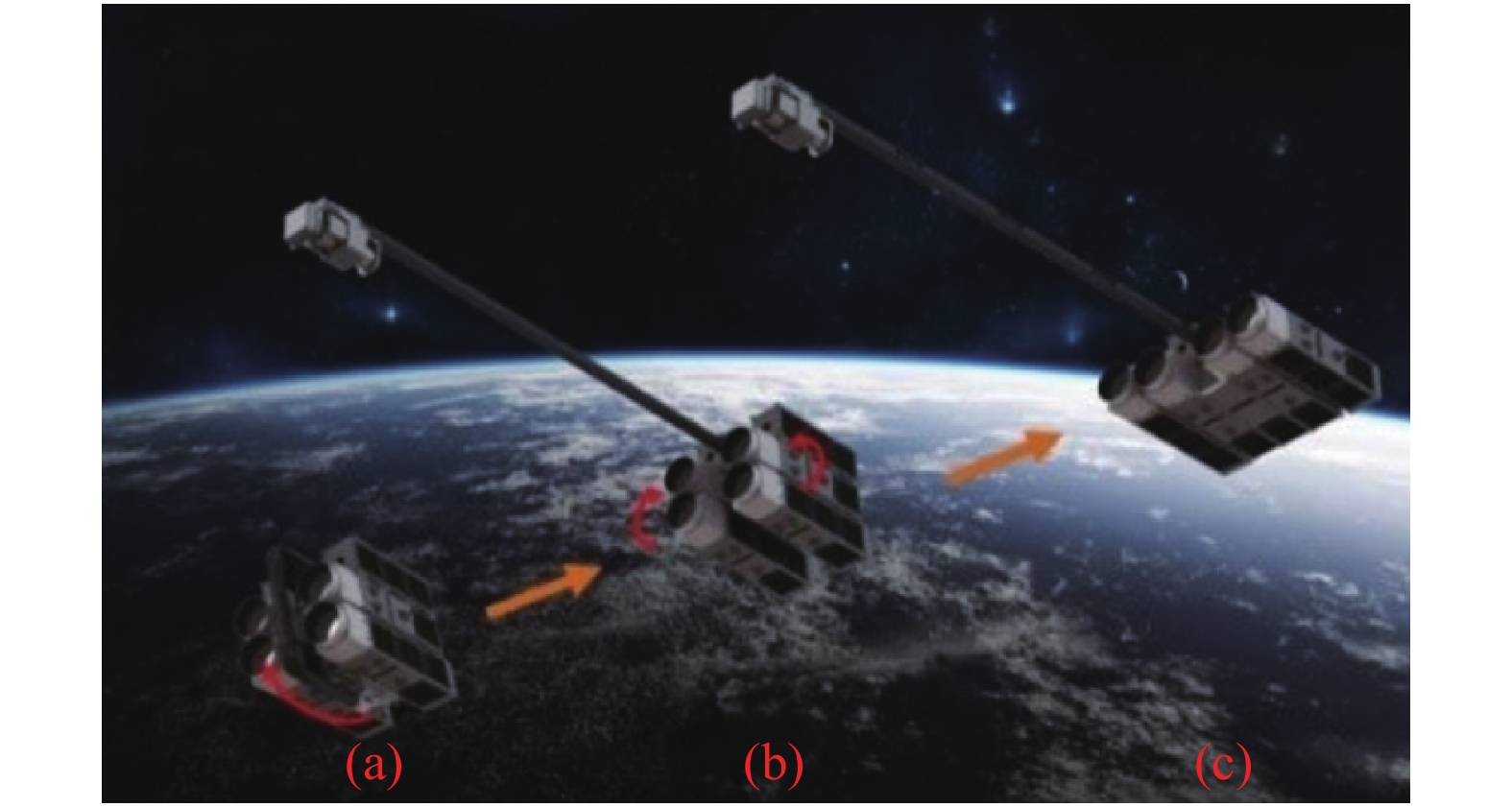
英国萨里大学和美国加州理工学院、印度空间科学与技术学院联合开展了AAReST (Autonomous Assembly of a Reconfigurable Space Telescope)计划[8-10]。AAReST望远镜为实现大视场的光学系统采用了主焦点形式(焦距1.2 m,视场0.3°),主镜采用稀疏孔径的形式,展开后由四个圆反射镜组成,子镜口径为100 mm。为节省运载器空间,发射时为收起状态,其体积为0.5 m×0.5 m×0.6 m。在轨工作时主次镜展开,且主镜的组成部分连接到一组Cubesats集群,如图3所示。串联可变桁架通过电机驱动具有二维自由度。与主要有效载荷分离后,通过可变智能桁架结构将次镜组件调整至工作状态[11]。望远镜具有两种工作模式:由图3中(a)的折叠运载状态在可变桁架展开后实现图3(b)的高分辨率模式(compact mode);通过克服磁吸式结构的非线性力来实现不同形式的主镜子镜拼接,通过图3(c)中的形式实现大视场模式(wild mode)。
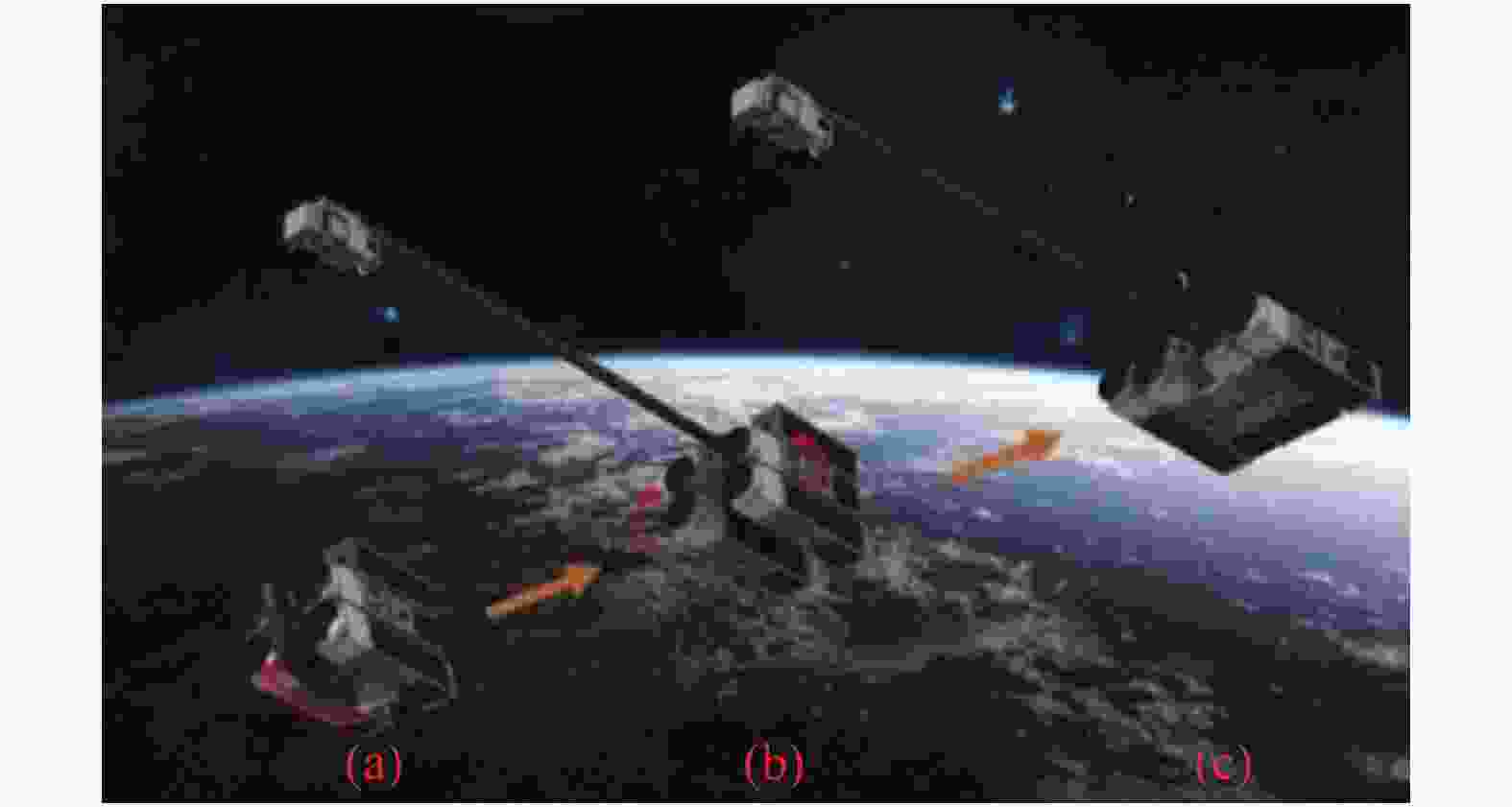
图 3 AAReST望远镜展开示意图
Figure 3. Schematic diagram of AAReST telescope deployment
-
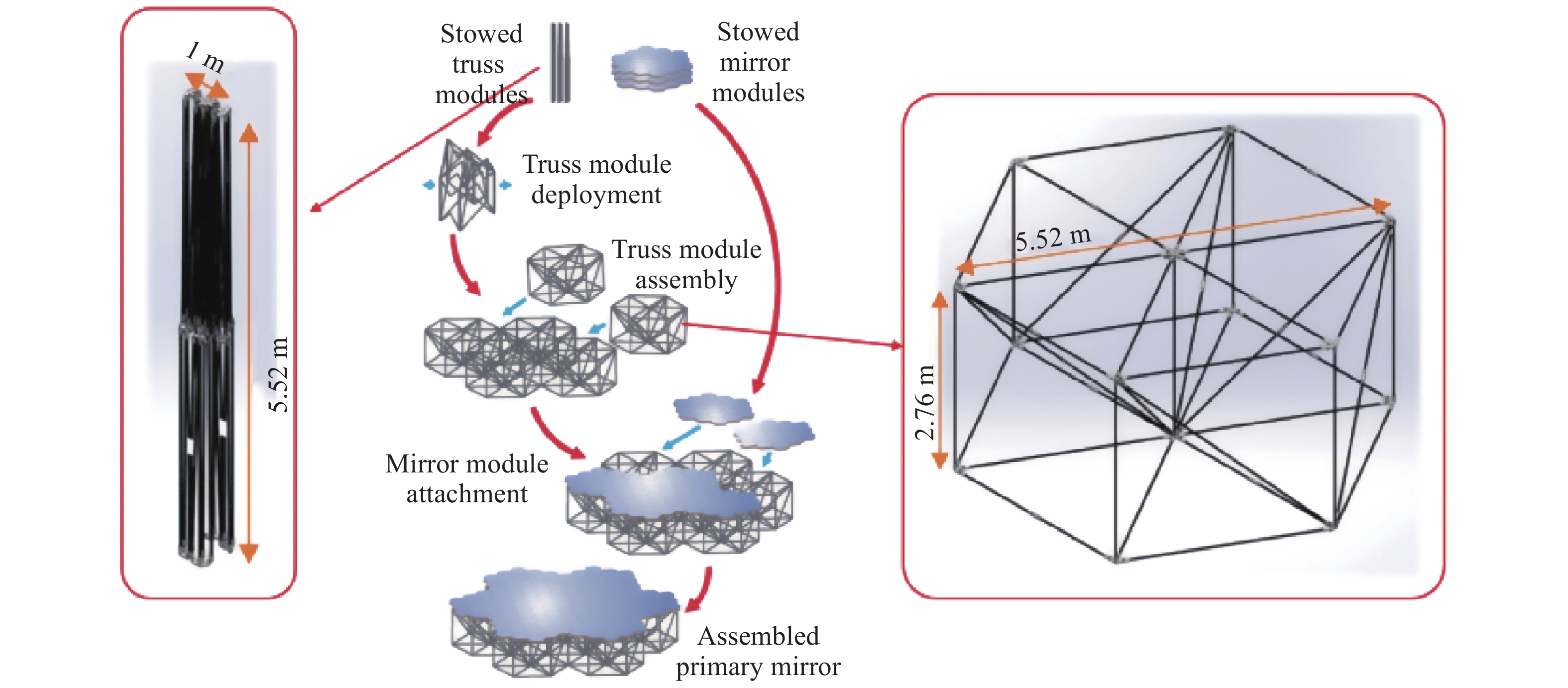
RAMST望远镜为100 m量级的空间望远镜,通过在紫外至近红外波段工作,以达到观测太阳系外行星和恒星种群、暗物质等的科学目标。其主要挑战是主镜背板的结构形式必须适应主镜表面的球形几何形状并尽量减小光学误差,同时在发射时具有高体积压缩比。为了达到这些要求,最终采用六边形桁架作为可变桁架结构的展开形式,并通过并联机器人将弹簧铰链压缩状态实现展开,然后将子镜模块在适当的对接位置安装在桁架上。每个桁架展开后口径可达5.5 m,如图4所示。子桁架的部署主要可分为桁架展开与子桁架拼接两部分工作。在桁架展开阶段,通过机器人上的双目视觉系统与力传感器实现力、视觉的反馈,从而实现0.5°的控制精度来展开桁架模块。通过机器人和压缩状态桁架铰链中预载弹簧力展开后,再通过锁紧机构锁定桁架。在子桁架拼接阶段,通过七自由度并联机器人对子桁架实现拼接,通过机器人的视觉系统与激光跟踪仪配合使用来保证拼接的精度。
可变桁架采用碳纤维M55 J作为主要材料。为使桁架满足0.69 Hz的一阶频率和1 μm的表面定位精度的要求,将单个桁架设计为长2.76 m,直径45 mm,厚度为3 mm。每个可变桁架端部的铰链不采用额外的锁紧机构弹簧加载的形式实现锁紧,展开后锁紧的铰链具有高刚度。该设计的基本频率为1.1 Hz,超过了系统要求并实现了3.8 kg/m2的结构面密度[12]。

图 4 RAMST可变桁架结构
Figure 4. RAMST variable truss structure
-
随着光学设备的口径越来越大,对光学设备的集成检测也提出了更高的要求。传统的装调工装及设备,目前已经有一些大型光电设备将机械臂应用在计算机辅助装调中,文中对其采用方法进行了总结。
-
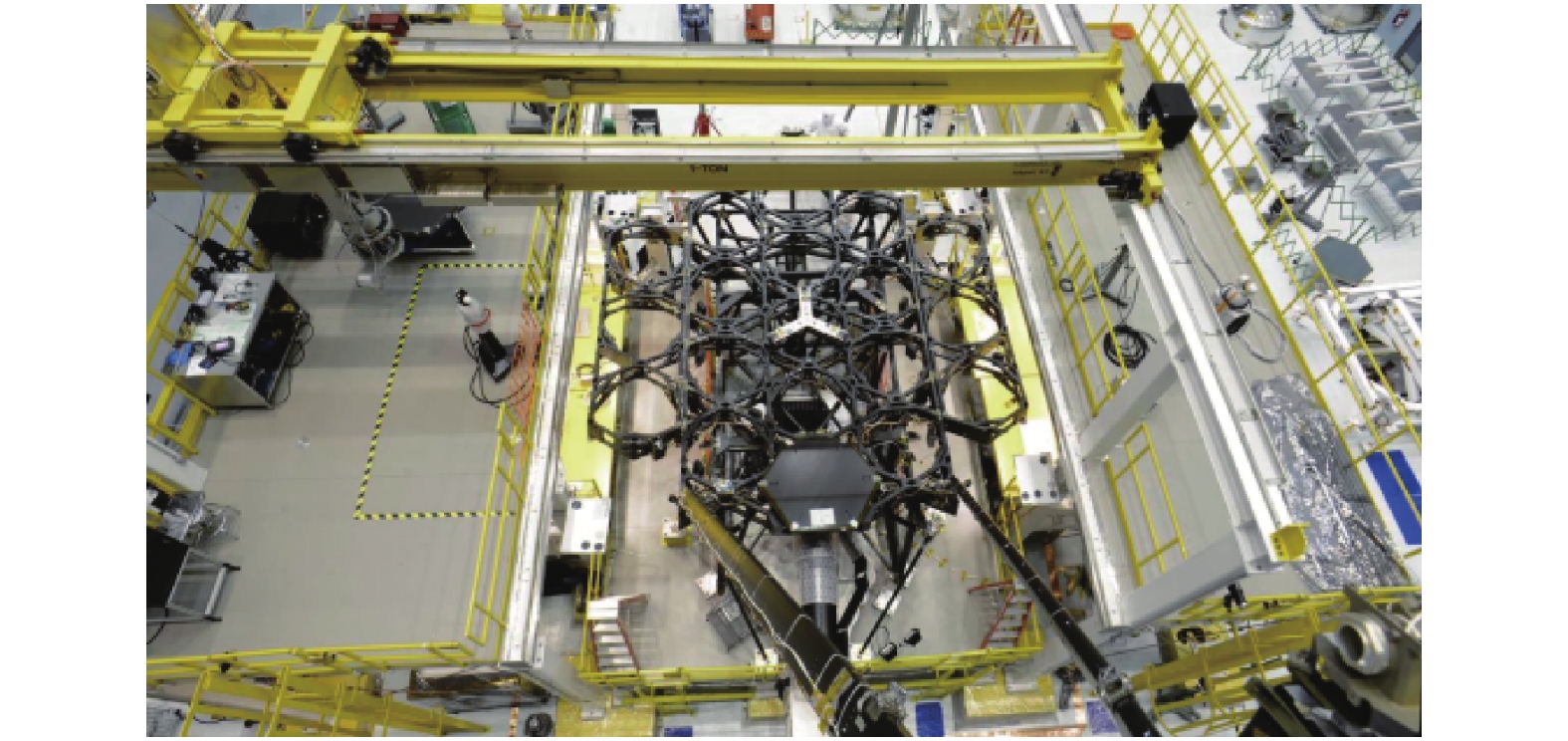
备受瞩目的下一代空间望远镜JWST的主镜为直径6.5 m的拼接镜,如此巨大的太空望远镜很难找到合适的发射器,所以它们只能被折叠放置于运载火箭中而后在太空中展开,如图5所示。NASA从2018年5月开始使用天基构造方法来研究望远镜在轨组装技术,这项研究与多个机构合作以找出巨型望远镜在太空中组装的最佳方案。机械臂在完成任务时会进入休眠阶段,直到望远镜需要进行维修等操作时才会被唤醒。

图 5 对JWST进行装调
Figure 5. Adjustment of JWST
在主镜拼接子镜地面装调检测中,JWST使用了机器人结构和激光跟踪仪。子镜的位置监控由多台激光跟踪仪实现,将三个与激光跟踪仪配套的反射靶球设置为一组,同组内三个反射靶球的反射方向不同,以保证在不同位置都可以实现位置检测。子镜位置控制执行元件由机械臂和六自由度并联平台组成。机械臂采用典型的关节式机器人,通过机械臂移动光学元件到所对应的位置,以实现大范围移动。通过六自由度并联平台在小范围内实现六个自由度的位置精确调节。结合六自由度并联机器人与机械臂可同时实现大操作行程与高定位精度,实现微米级精度的装调,如图6所示。

图 6 JWST采用机器人进行主镜装调
Figure 6. Adjustment of JWST primary mirror with robotics
JWST装调主镜时采用的坐标测量方法难以满足光学精度且不存在实时反馈,使得光学系统需进行后续调整,且激光跟踪仪仅可应用于地面的装调,对于光学系统在太空中的装调场景具有局限性。
-
主反射镜在轨组装是解决空间望远镜口径增大的一种可靠方案,通过在轨组装的方式可以突破传统太空望远镜受火箭整流罩的尺寸以及运载能力的限制。主镜的可装配性使得子镜具有轻量化、低成本、可变形、可替换等特点,从而降低空间相机的总体质量,延长相机使用寿命,节约发射成本。
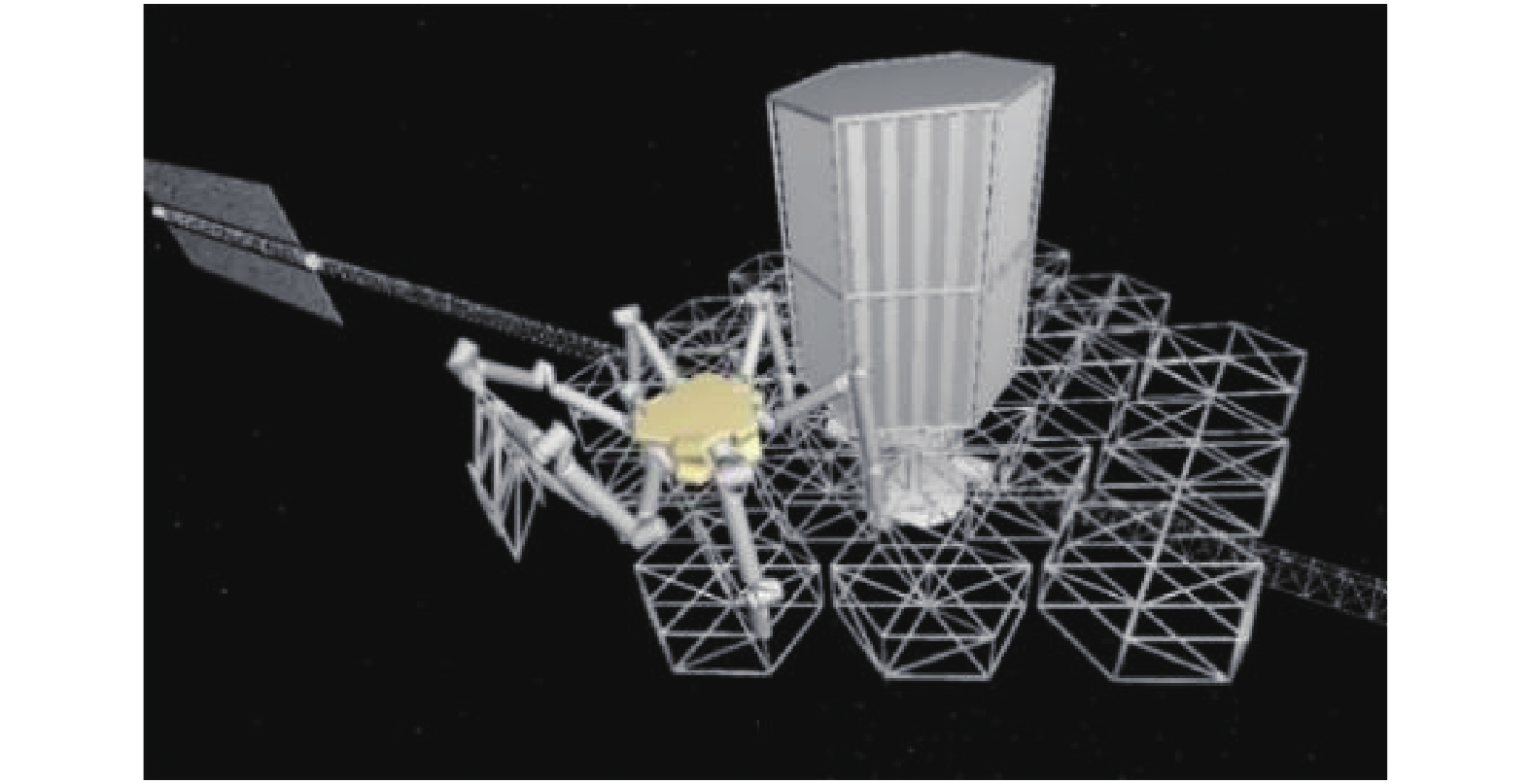
RAMST望远镜为主镜100 m量级的空间望远镜其主镜与主镜支撑桁架结构的装调与维护均需通过六足机器人作为装调机器人实现,如图7所示。六肢中的四个专门用于运动,以实现在桁架上行走。另外两个机械臂用于抓取桁架和子镜以进行运输。六足机器人每条支链具有七个自由度,前六个用于确定末端执行器的位置和方向,第七个自由度提供运动学冗余[13-15]。
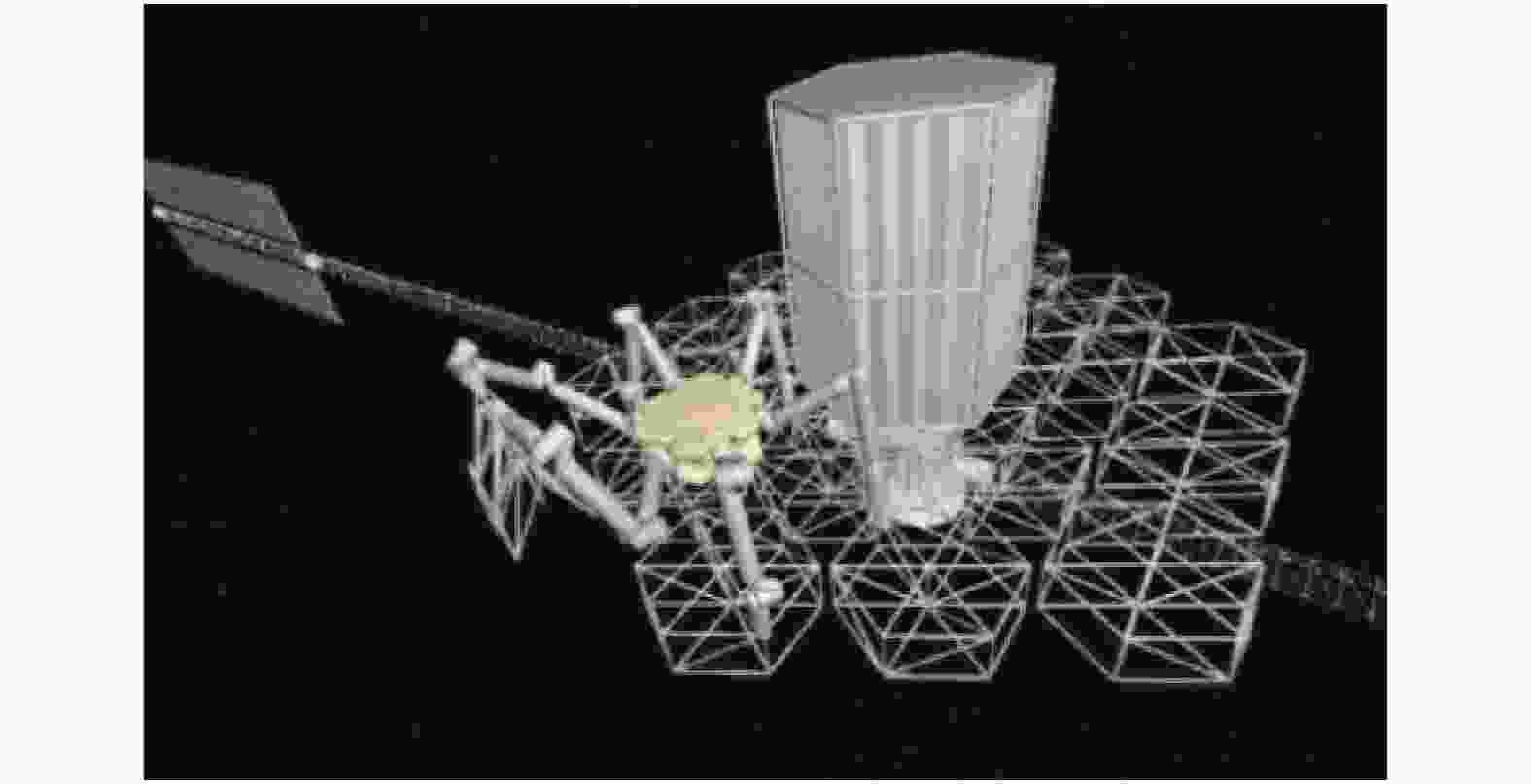
图 7 RAMST通过六足机器人安装主镜
Figure 7. RAMST primary mirror installation with the hexapod robotics
-
目前的航天器普遍采用一体化设计、一次性使用的设计思想,航天器接受服务存在较大难度。未来航天器将普遍应用接受在轨服务设计,引入标准机电热接口、模块化可更换接口、在轨加注接口、可重构智能系统等概念,其中模块化是提升航天器接受在轨服务能力的有效手段。目前国际上正在进行的几个项目已经取得了相应进展[16-18]。
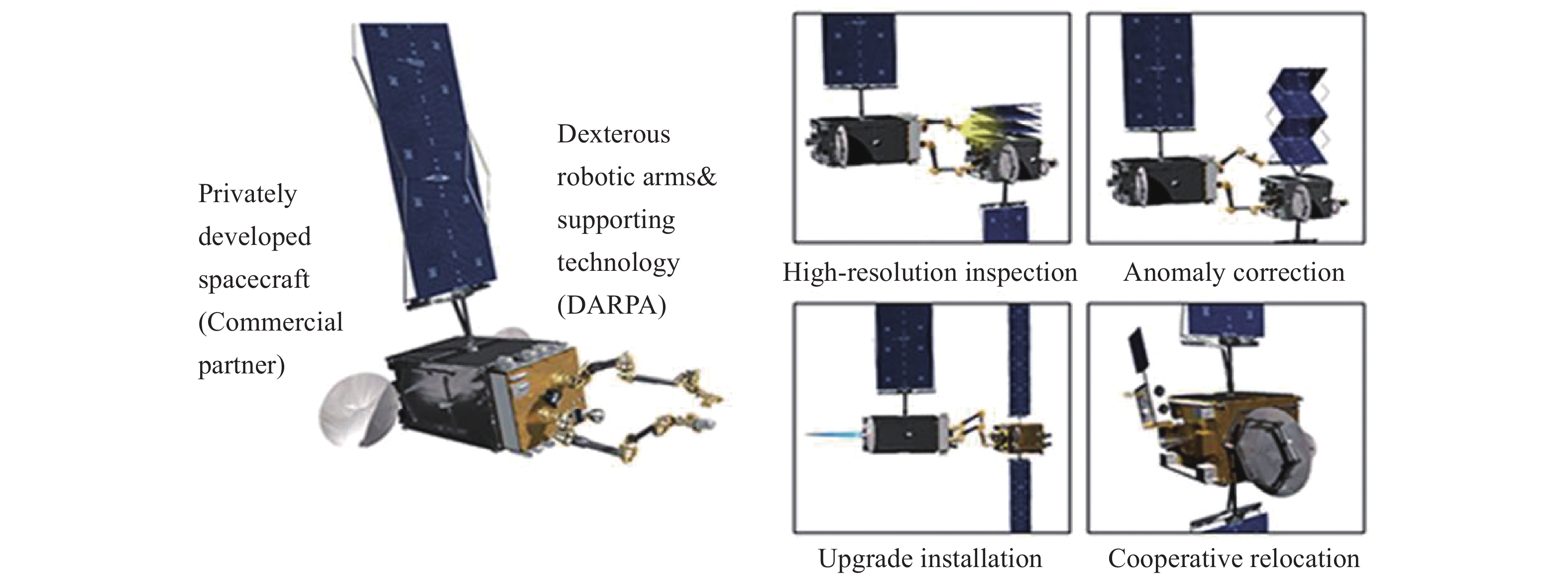
2016年美国启动了地球同步轨道卫星自主服务项目,其任务是高轨废弃卫星的重新利用。项目中自主服务航天器平台首先完成了对客户卫星的近距离详查,并通过可变智能桁架对太阳电池阵、天线展开故障等机械异常进行修正,然后利用携带的FREND-MK2可变桁架实现与卫星之间的连接并为卫星系统升级,如图8所示。
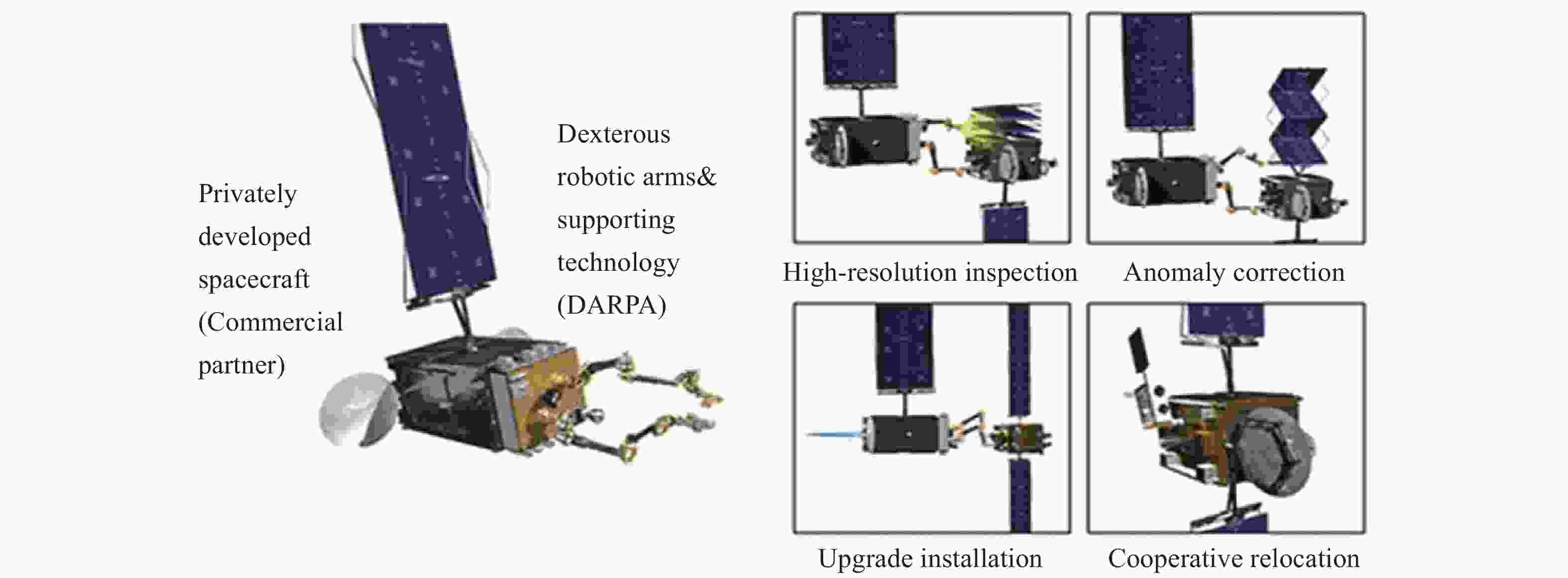
图 8 DAPRA通过可变智能桁架实现在轨维护
Figure 8. DAPRA realizes on-orbit maintenance through variable intelligent truss
2020年7月,美国国防高级研究计划局(DARPA)发布消息,在轨维护项目预计将于2023年发射。DARPA将通过与美国海军研究实验室(NRL)达成的协议提供飞行载具的有效载荷,包括可变智能桁架。2021年,NRL将把可变桁架整合到有效载荷结构上,然后预计在同年底开始环境试验。
-
2019年10月,诺斯罗普·格鲁曼公司子公司的SpaceLogistics将其任务扩展飞行器(MEV-1)送入轨道。该航天器的设计目标是在客户卫星燃料耗尽时使其与卫星对接,将自身固定在客户卫星上。MEV-1综合利用电推进、化学推进、动量轮系统实现轨道机动,并通过特制探头等机构与目标卫星连接和锁定,其对接机构能与80%以上的在轨卫星连接。MEV-1是该行业的第一个商业在轨服务任务,首次尝试在地球静止轨道附近的两个航天器之间进行对接,通过可变智能桁架对其进行维护并提供能源,完成任务后使桁架解锁并分离,如图9所示,并在对接后实现了检测与维修、配件更换以及燃料补给,从而使目标卫星延长寿命。其高自由度在完成在轨维护时提供了显著的作用[19]。

图 9 MEV-1通过可变桁架对接与分离过程
Figure 9. Docking and separation process of MEV-1 through the variable truss
-
Martin Kortmann在基于德国航空航天中心(DLR)资助的iBoss项目中提出了采用标准接口的块形式的模块来构建iBoss的空间系统。所有常见的卫星子系统都可以由iBoss构建块组成,并且将有效载荷放置在iBoss模块中。
由于在大多数轨道上人工操作是不可行的,且延迟和高精度要求使纯远程操作方法无法使用。该项目通过可变智能桁架实现模块之间的组队变阵,通过iBoss模块化组合,组合成为不同的有效载荷。
为实现对接功能,可变智能桁架轨需具有轨迹规划和高精度的定位功能。通过工业机械臂KUKA LWR IV进行实验,最大可实现7 kg负载,定位精度可达0.05 mm。机械臂末端设置接口并固定卫星模型以进行实验,如图10所示。

图 10 轨迹规划与精度实验
Figure 10. Trajectory planning and accuracy experiment
最终将多个模块组合成一个移动卫星平台,通过该方式采用可变桁架在其生命周期内为多个客户提供服务,该平台能够到达不同客户的轨道。通过可变智能桁架是实现在轨组装的目标。桁架配备与卫星模块相同的接口作为维护时的机械连接,当模块未连接到客户卫星时,该电接口用作模块的电源,如图11所示。采用了机器视觉的方法进行标记并对目标完成定位[20]。

图 11 卫星模块自动对接的机械接口
Figure 11. Mechanical interface for automatic docking of the satellite module
-
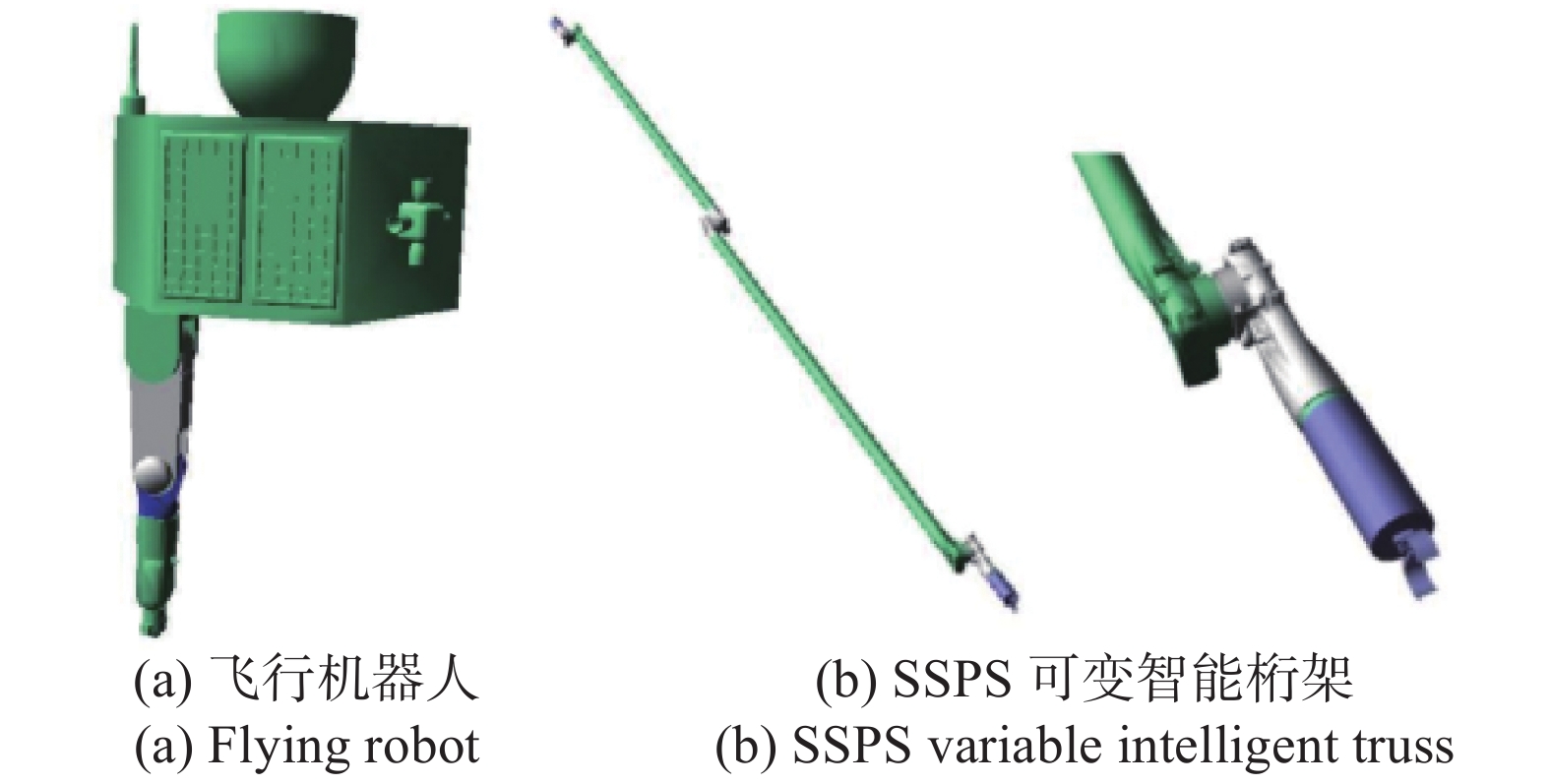
空间太阳能发电站(Space Solar Power Station,SSPS)是中国科学院与中科空间信息技术有限公司的合作研究项目,受限于发射能力这种类型的千米级站必须在轨道上组装。对于SSPS,因为其规模使任务范围非常大,所以组装任务通过飞行机器人和可变智能桁架协同完成[21-22]。通过无线通信与协作机器人交换信息,并采用分级控制策略,不仅适合集中决策,而且适合快速灵活的系统需求[23]。通过推进器实现姿态和轨道控制,以在太空中自由飞行。然后通过可变智能桁架将天线模块安装到天线子桁架结构上。
飞行机器人是展开长度2.4 m的三自由度机械臂,具有三个旋转自由度,质量约为0.5 t(1 t =103 kg);可变智能桁架总长24 m并具有七自由度,总质量约为0.1 t。末端执行机构的定位精度可达1 mm,见图12。

图 12 在轨组装智能桁架
Figure 12. Variable truss assembly on orbit
组装子模块时需要多个太空机器人协同完成工作。在对地静止轨道中,将子模块在组装位置附近由手臂释放,然后在轨道上部署到其操作配置中。多个自由飞行的机器人对一个子模块进行捕获,并将其运至装配位置约10 m的范围内,然后通过可变智能桁架将模块定位到装配点并完成对接,如图13所示。

图 13 SPSS装配过程
Figure 13. Assembly process of SPSS
-
从上文所述可知,在工作量如此大的工程中,可变智能桁架在组装和维护任务中起着重要作用。对装配目标识别并自主完成,大大地降低了装配任务的依赖性。
机械臂形式的智能桁架结构能够节省空间从而实现运载更大口径的空间光电设备、适应更为复杂环境的装调、对空间卫星实现在轨维护延长寿命,这些都是机械臂形式桁架显著的优点。但是这种结构面临的问题和挑战是,如果仅采用一个机械臂,内部的度量系统、执行系统的精度难以保证。串联型机械臂的精度是逐关节损失的,即使在结构上精度再高也无法满足光学波长级别的调整要求。想要完成基于机械臂的辅助装调则需要光学的反馈手段,目前主流方法主要可分为波前传感、机器视觉、曲率传感等。
-
激光跟踪仪是一种常用的坐标测量设备,美国 Arizona 大学的 Burge 等人最早应用激光跟踪仪来检测研磨阶段的大口径光学非球面的面形[24],之后在光学检测中逐渐广泛应用。JWST在装配过程中使用了激光跟踪仪进行反馈实现主镜的装调[25];中国科学院光电技术研究所也通过激光跟踪仪对1.3 m的主反射镜检测面形精度[26],得到了0.5 μm RMS的测量精度。
此外,目前采用激光跟踪仪对机械臂实现定位与反馈也有很多研究,国外在这方面的研究起步较早:1991年Nakamura对基于多边式的激光跟踪测量进行了研究,之后Takasuji对多边法的测量改进精度达到了49 μm;国内学者也进行了较多研究:为了实现更高的定位精度,乔贵方等人通过基于模型转换的串联机器人运动学参数标定方法实现了高精度的运动学参数误差辨识和误差补偿;马一心等人建立了基于先验信息的动态测量粗差探测模型,分析了不同粗差探测模型在激光跟踪仪动态测量数据粗差探测处理的有效性[27-29];孙大林等人通过单激光跟踪仪的顺序多站式测量系统实现了大型串联工业机器人的高精度标定。通过在不同位置对工业机器人的末端位置进行顺序测量,并基于多边测量方法计算机器人的末端位置,有效地优化了末端位置的测量不确定度[30]。
基于坐标测量的设备除激光跟踪仪外,还包括摆臂式轮廓仪,可应用于非球面的研磨和抛光初期阶段的面形检测,能够实现微米至亚微米级的面形检测精度。
此外还有非球面轮廓测量仪,通过两个正交方向的线性平台进行探测,被测件置于360°旋转台上,实现其轮廓的测量。采用该技术的LUPHOScan系统可得到优于50 nm的面形测量精度。但这些方法受限于体积,且难以应用于在轨组装的场景下[31]。
-
机器视觉也是可变桁架主要反馈手段之一,可在大行程范围实现反馈,减少执行时间与定位误差,提升效率。
20世纪70年代,日本琉球大学的白井等人通过机器视觉获取目标的位置,然后基于位置来控制机器人,形成了最早期的视觉机器人系统。随着计算机算力的提升,机器视觉也由识别二维图像升级为三维成像。2016年,普林斯顿大学的Andy提出了一种多视图自我学习的视觉机器人抓取技术,利用卷积神经网络分割和标记不同视角目标场景,通过多视觉系统相关的迭代运算,将三维CAD模型与点云图匹配来完成目标6D姿态估计[32]。国内经过多年的不断探索和科研积累也取得了一定的成绩。
温卓漫等人通过Sobel算子和改进的非极大值抑制算法提取靶标图像的单像素边缘,然后采用最小二乘法进行圆拟合,最后根据圆形的大小在每个圆形周围开出一大一小两个正方形窗口,统计在两窗的补集内距离圆心较近的直线数量,若直线数量满足规定条件则认为是合作靶标。利用手眼相机、六自由度转台和合作靶标对算法进行了验证,实验结果表明该算法能在1.5 m的距离内准确识别合作靶标,实现了快速且稳定的合作靶标的识别算法[33]。文婉欣等人基于单目视觉利用halcon软件中的轮廓提取算法提取出图像的像素坐标,对其进行九点标定,结合手眼关系得到相机和机械臂基坐标系之间的位置关系[34]。
虽然采用机器视觉的手段可实现大范围内的反馈,但其精度无法胜任在轨装调等高精度工作中,需与其他反馈方法配合使用。
-
波前传感技术在光学装调应用最为广泛。目前的主流是通过计算机辅助装调的手段提高装调效率与精度。
Arizona大学的Anastacia利用灵敏度矩阵法分析了南非大型望远镜球差校正器的失调像差特性;杨晓飞也曾将灵敏度矩阵模型应用于离轴三反望远镜[35]。曹宇泽等人通过两步式灵敏度矩阵法解决了传统的二次模型灵敏度矩阵法的精度问题,对传统灵敏度矩阵改进加入了精调步骤,最终将300 mm口径的卡塞格林系统调整至RMS优于0.03波长[36]。
针对传统的计算机辅助装调的缺陷科研人员也提出了改进方法。Lee等人提出了一种对不同情况进行随机模拟,然后分别分析失调对相位和振幅项的影响的方法[37]。由于大口径光学系统内部空间有限,由此梁琼心等人采用基于本征模式系数求解失调量的计算机辅助装调方法,相比传统的灵敏度矩计算量小,无需对探测器分区处理,并简化了波前重构矩阵的构造[38]。
此外还对矢量像差在装调中的应用进行了研究。矢量像差理论由Hopkins的旋转对称光学系统的波像差理论发展而来。Schmid在McLeod工作的基础上在R-C望远镜校正失调彗差的情况下提出了两种方法计算次镜的失调量,并推导了失调两反望远镜的三级彗差场和三级像散场的矢量表示形式。在此基础上,顾志远推导了失调两反望远镜的像差场偏移矢量的表达式和三级彗差场和三级像散场的矢量解析式,并分析了光阑在主镜的两反望远镜主镜像散面形误差对像散场的影响。
-
由于可变桁架应用在空间卫星的在轨组装维护或光学系统的装调需提供高精度,且具有多自由度,使得控制系统更加复杂,对控制算法也提出了更高的要求。因此出现了很多应用于在轨组装的机械臂控制算法:Nanos等通过求解合适的空间机械臂关节角及基座姿态的初始值,使设定的轨迹不会遇到广义雅可比矩阵奇异的情况[39];Reis等人提出了一种结合驱动关节轨迹规划的线性二次最优和压电致动器的正位置反馈控制算法用于单连杆旋转柔性臂的振动控制中。在用PD算法实现驱动关节运动控制的同时实现运动轨迹规划[40];李鹤宇等人针对现有空间机械臂控制方法在实际应用中调试时间长、稳定性差的问题,提出了一种基于深度强化学习的控制算法。构建仿真环境用于产生数据,通过状态变量实现仿真环境与深度强化学习算法的交互,通过奖励函数实现对神经网络参数的训练,最终实现使用近端策略优化算法控制空间机械臂将抓手移动至物体下方特定位置的目的[41]。
随着在轨维护与装调任务的复杂程度和要求的逐渐提高,使研究重点逐渐演变为多机械臂协同控制与如何实现快速高精度的算法控制。并联空间机器人与单臂空间机器人相比,应用于在轨捕获更具有优势,且可实现更高精度。然而由于捕获前后使开环系统变为闭环,使运动学约束、动力学以及能量传递等问题的研究变得更加复杂;基于视觉引导的方法存在较大误差,引导完成后难以保证部件准确装配到位,存在间隙或应力。因此,在装配界面发生接触后,需采用力反馈控制确保部件准确到位的同时保证装配界面受力在安全范围内。
为了解决多臂协同控制的问题,Jia等人对闭链双臂空间机器人提出了自适应控制方案[42]。
李硕等人针对任务空间中基座位置不受控、姿态受控的双臂空间机器人轨迹跟踪控制问题,提出了一种基于状态依赖 Riccati方程的优化控制方法,实现了对双臂空间机器人末端抓手位置与基座姿态的协同轨迹跟踪[43]。
为解决视觉引导存在较大误差的问题,胡瑞钦等人提出采用视觉与力觉结合的方法进行控制,实现卫星特殊部件的装配需求。通过相机进行标定并建立视觉测量场;然后手眼标定,通过建立机械臂的基坐标系与末端坐标系,并对执行末端的靶球进行标定,得到机器人坐标系与视觉测量坐标系间的转换关系;通过探针式手持测量工具绕测量点进行多次标定,完成对标定工具的标定,并求得被测点坐标,然后通过逆运动学求解得到机械臂的目标位姿;在规划路径后采用六维力传感器作为反馈元件,对力、位移控制的自由度分解。在机械臂负载变化时,对负载的质量特性进行预先测量,进行负载质量特性参数的切换,实现对应负载的重力补偿,并采用柔顺控制方法释放作用力[44]。
然后手眼标定,通过建立机械臂的基坐标系与末端坐标系,并对执行末端的靶球进行标定,得到机器人坐标系与视觉测量坐标系间的转换关系;通过探针式手持测量工具绕测量点进行多次标定,完成对标定工具的标定,并求得被测点坐标,然后通过逆运动学求解得到机械臂的目标位姿;在规划路径后采用六维力传感器作为反馈元件,对力、位移控制的自由度分解。在机械臂负载变化时,对负载的质量特性进行预先测量,进行负载质量特性参数的切换,实现对应负载的重力补偿,并采用柔顺控制方法释放作用力[44]。
艾海平等人通过捕获后闭链系统运动几何关系及力的传递规律分析了捕获接触、碰撞过程对之后闭链系统产生的冲击效应,提出了无源性理论的模糊控制方法,解决了漂浮基空间机器人双臂夹持捕获航天器过程的冲击效应及其后镇定运动的力/位置控制问题[45]。
与此同时,为了实现机械臂的路径规划,在空间环境下的高效作业规划算法的研究及采用通过目标视觉识别方法的研究逐渐增多。
Leutenegger等人提出了二进制鲁棒尺度不变特征Brisk在一系列同心圆上等间距选取采样点,求出采样点间的距离集合,并利用其中短距离集合构造二进制描述算子[46];Strecha依据投影变换原理,通过学习目标函数,以最小化相似图像对的类内特征方差,最大化不相关图像对的类间特征方差,提取最优变换投影和阈值数据[47]。
-
根据目前国内外在可变智能桁架取得的进展,可以对其发展趋势进行展望。
(1)由少自由度发展为多自由度
在ATLAST-9.2 m空间望远镜AAReST项目中,通过少自由度的可变智能桁架应用在次镜支撑上仅具有定位功能,并不具有调整功能。而后出现的通过六自由度和冗余可变智能桁架应用于在轨组装和光学装调中,自由度的提升使该桁架的应用场景更加广泛。在自由度增多的同时,使运动学约束变化及动力学变得更加复杂,因此对控制方法提出了更严格的要求。
(2)由地面装调发展为在轨装调检测
JWST在主镜的安装是通过可变智能桁架在地面进行实现的。而RAMST桁架的展开以及主镜拼接等工作均需要实现无人值守的自动化在轨组装工作,这使得任务的复杂程度提高。同时地面的检测手段并不适用于空间工作,如JWST在地面使用激光跟踪仪检测并对子镜间的位置误差反馈,在轨组装时难以应用。因此科研人员对曲率传感技术等反馈方法进行研究并应用在空间卫星和望远镜的组装工作中。望远镜嵌合式可变智能桁架和可变智能桁架辅助装调之间的区别也越来越模糊。
(3)单一检测与控制方法发展为多种方法融合
装调任务难度和要求的提高、系统精度的提升对检测与控制方法提出了更高的要求。机器视觉精度可达毫米级,坐标测量精度可达微米级,而光学手段可达亚微米到微米级。为了实现系统大范围的高精度控制,一般采用多方法的融合手段。同时,融合了深度学习的控制方法也受到广泛研究,以应对更为复杂的工作,实现轨迹规划和更高的控制精度。机器视觉、曲率传感及波前传感等方法在在轨组装和光学装调中也得到了广泛应用。
在完全自主在轨服务中,航天器在人工智能的支持下不依赖地面测控,仅依靠自身传感器和控制装置就能自主地完成相关操作,具有更高的灵活性,是未来的发展趋势。在轨服务操作涉及到的关键技术主要有测量与感知、决策与规划、操作与控制、学习与适应、多智能体等。目前在轨服务操作关键技术的发展现状和趋势如表1所示。
表 1 计算机辅助装调关键技术现状与趋势
Table 1. Current status and trend of key technologies for computer aided adjustment
Key technology Development status Trends Measurement and perception Force feedback Perception and measurement based on multi-method fusion,
high-speed and high-precision scene reconstructionDecision and planning Model-based autonomous trajectory planning and human-based auxiliary decision-making Autonomous learning and decision-making in a complex dynamic environment Operation and control Autonomous, supervised, cooperative target grabbing, plugging, and other operations Multi-parameter fusion control based on force and vision Learn and adapting Manually extract features to determine the planning and control of the environment Autonomous extraction of features, trajectory planning, perception and control based on self-learning Intelligence Multi-truss control Multi-truss control based on distributed and collaborative learning -
空间望远镜克服了大气扰动的问题,实现了更好的成像质量。JWST已完成地面试验,基本具备状态,且更大口径的空间望远镜已在论证当中。我国在空间望远镜方面的研究起步较晚,目前我国最大口径的空间望远镜为正在研制中的空间站2 m级空间望远镜。因此,开展非常规环境下可变智能桁架研究,对空间望远镜模块化制造、望远镜融合式高精度传感与控制等方面均具有十分的重要理论与实践意义。不仅如此,利用可变智能桁架技术可在空间环境下实现太空柔性制造与系统集成,解决空间智能制造所面临的共性问题。
可变智能桁架作为大口径空间望远镜及空间载荷重要的研究内容之一。设计可变智能桁架方案需结合具体望远镜工作方式及系统要求,确定合适的自由度、协同工作的可变桁架数量、尺寸等相关参数。由于机器视觉、坐标测量、光学测量等方法的定位精度不同,需要选择合适的控制方法和光学反馈手段,以提升可变智能桁架系统的工作精度和性能。
目前可变桁架的执行精度通过现有的反馈及控制方法可基本满足精度要求,需在远程智能化方面进一步研究以实现更为复杂的决策与环境适应能力。此外,针对目前的光学检测手段难以在太空实现的问题,可通过融合各检测方法实现更便捷、快速且适用于太空环境的波长量级反馈方法。
Application of variable intelligent trusses in large aperture optical telescopes
-
摘要: 可变智能桁架在光学设备装调与在轨组装与维护等方面均有着巨大的优势,针对可变智能桁架在大口径光学设备上的相关技术及应用进行了归纳总结,并对其未来发展趋势进行了展望。首先,针对少自由度串联构型的桁架论述了关于望远镜嵌合式可变智能桁架设计及其应用;之后,着重介绍了可变智能桁架在望远镜在轨组装、调节以及在轨服务中的应用。针对其自由度与定位精度高的特点,总结了智能桁架调节时可使用的反馈方法并对可变智能桁架的结构与控制算法进行了论述;最后,对目前应用于智能桁架的技术进行了总结,并对未来的发展趋势进行了展望。
-
关键词:
- 大口径望远镜 /
- 在轨装调 /
- 可变智能桁架 /
- 计算机辅助装调反馈方法
Abstract: Variable intelligent trusses have great advantages in optical equipment and on-orbit assembly. The relevant applications and the development of variable intelligent trusses on large-aperture optical equipment were summarized. Firstly, for serial configuration with less degrees of freedom, the design and application of variable intelligent trusses applied on telescopes were discussed; then, the application of the variable intelligent trusses in the on-orbit assembly, service and adjustment of the telescope were introduced. In view of its high degree of freedom and high positioning accuracy, the feedback methods that could be used in the adjustment of the trusses were summarized, the structure and control algorithm of the trusses were discussed as well. Finally, the technologies currently applied to smart trusses were summarized and the development trend was summarized. -
图 7 RAMST通过六足机器人安装主镜
Figure 7. RAMST primary mirror installation with the hexapod robotics
图 8 DAPRA通过可变智能桁架实现在轨维护
Figure 8. DAPRA realizes on-orbit maintenance through variable intelligent truss
图 9 MEV-1通过可变桁架对接与分离过程
Figure 9. Docking and separation process of MEV-1 through the variable truss
图 11 卫星模块自动对接的机械接口
Figure 11. Mechanical interface for automatic docking of the satellite module
表 1 计算机辅助装调关键技术现状与趋势
Table 1. Current status and trend of key technologies for computer aided adjustment
Key technology Development status Trends Measurement and perception Force feedback Perception and measurement based on multi-method fusion,
high-speed and high-precision scene reconstructionDecision and planning Model-based autonomous trajectory planning and human-based auxiliary decision-making Autonomous learning and decision-making in a complex dynamic environment Operation and control Autonomous, supervised, cooperative target grabbing, plugging, and other operations Multi-parameter fusion control based on force and vision Learn and adapting Manually extract features to determine the planning and control of the environment Autonomous extraction of features, trajectory planning, perception and control based on self-learning Intelligence Multi-truss control Multi-truss control based on distributed and collaborative learning  下载: 导出CSV
下载: 导出CSV
-
[1] Fan Wenqiang, Wang Zhichen, Chen Baogang, et al. Review of the active control technology of large aperture ground telescopes with segmented mirrors [J]. Chinese Optics, 2020, 13(6): 1195-1208. (in Chinese) [2] Paul A L, Charles A, Mark C, et al. James Webb Space Telescope: Large deployable cryogenic telescope in space [J]. Optical Engineering, 2012, 50(1): 011003. [3] Bin M, Yi H, Zhaohui S, et al. Automation of the AST3 optical sky survey from Dome A, Antarctica [J]. Monthly Notices of the Royal Astronomical Society, 2020, 496: 2768-2775. doi: 10.1093/mnras/staa1730 [4] Abdussamatov H, Lapovok Y, Khankov S. The thermal regime of the special space-based lunar telescope STL-200 for monitoring variations of the global albedo of the earth from the earthshine of the moon[J]. Journal of Optical Technology, 2014, 81(7): 382-387. [5] Allison Y, Youngblood A, Arney G N. The hubble space telescope's near-UV and optical transmission spectrum of earth as an exoplanet [J]. The Astronomical Journal, 2020, 160(3): 100. doi: 10.3847/1538-3881/aba0b4 [6] Tiffany G, Joshua L, Till L, et al. Alignment of the James Webb space telescope optical telescope element [C]//Proc of SPIE, 2016, 9904: 99043Z. [7] Paul R, Charlie A, Larry G. Design and development of the primary and secondary mirror deployment systems for the cryogenic JWST [C]//Proc of the 37th Aerospace Mechanisms Symposium, 2004: 29-44. [8] Redding D C, Feinberg L, Postman M, et al. Beyond JWST: Performance requirements for a future large UVOIR space telescope [C]//Proc of SPIE, 2014, 9413: 914312. [9] William R O, Lee D F, Lloyd R P. ATLAST-9.2 m: a large-aperture deployable space telescope [C]//Proc of SPIE, 2010, 7731: 77312M. [10] Craig U. Autonomous Assembly of a Reconfiguarble Space Telescope (AAReST)-A CubeSat/Microsatellite based technology demonstrator [C]//27th Annual AIAA/USU Conference on Small Satellites, 2013: 1-7. [11] Lee D F, Ritva K, Charlie A, et al. James Webb Space Telescope (JWST) Optical Telescope Element (OTE) pathfinder status and plans [C]//Proc of SPIE, 2014, 9143: 91430E. [12] Nicolas L, Paul B, Joel B. Architecture for in-space robotic assembly of a modular space telescope [J]. Journal of Astronomical Telescopes, Instruments, and Systems, 2016, 2(4): 041207. doi: 10.1117/1.JATIS.2.4.041207 [13] Cheng Zhengai, Hou Xinbin, Zhang Xinghua, et al. In-orbit assembly mission for the Space Solar Power Station [J]. Acta Astronautica, 2016, 129: 299-308. doi: 10.1016/j.actaastro.2016.08.019 [14] Wang Rui, Wang Fuguo, Hao Liang, et al. Research on degree of freedom of secondary mirror truss mechanism based on screw theory and geometry algebra applied on large telescopes [J]. Optik, 2020, 224: 165474. doi: 10.1016/j.ijleo.2020.165474 [15] Wang Rui, Wang Fuguo, Hao Liang, et al. Posture optimization of a 3-6R parallel mechanism for secondary mirror truss applied on large telescopes [J]. Optik, 2020, 227: 165520. [16] Angel F, Ou M, Khanh P, et al. A review of space robotics technologies for on-orbit servicing [J]. Progress in Aerospace Sciences, 2014, 68: 1-26. doi: 10.1016/j.paerosci.2014.03.002 [17] Hari N, Khaled A, Andrew A. Space robotics technologies for deep well operations [C]//Offshore Technology Conference, 2012: 22989. [18] Hrishik M, Phillip S. Motion and parameter estimation for the robotic capture of a non-cooperative space target considering egomotion uncertainty [C]//14th Symposium on Advanced Space Technologies in Robotics and Automation, 2017. [19] Jakob S, Frank K. Space robotics: An overview of challenges, applications and technologies [J]. Kunstliche Intelligenz, 2014, 28: 71-76. [20] Martin K, Thomas A S, Hauke S, et al. Building block-based "iBOSS" approach: Fully modular systems with standard interface to enhance future satellites [C]//66rd International Astronautical Congress, 2015. [21] Rutkovsky V, Sukhanov V, Glumov V. Free-flying manipulation robot using for in-orbit assembly of large space structures [C]//International Conference on Recent Advances in Space Technologies, IEEE, 2011: 808-813. [22] Nishida S, Yoshikawa T. A new end-effector for on-orbit assembly of a large reflector [C]//International Conference on Control, 2006: 1-6. [23] Ozaki F, Machida K. Robot control strategy for in-orbit assembly of a micro satellite [J]. Advanced Robotics, 2004, 18(2): 199-222. doi: 10.1163/156855304322758024 [24] Burge J H, Su P, Zhao C Y, et al. Use of a commercial laser tracker for optical alignment [C]//Proceedings of SPIE, 2007, 6676: 66760E. [25] Liu Fengwei, Wu Yongqian, Chen Qiang, et al. Overview of advanced manufacturing technology of large-aperture aspheric mirror [J]. Opto-Electronic Engineering, 2020, 47(10): 200203. (in Chinese) doi: 10.12086/oee.2020.200203 [26] Zhang Lei, Liu Dong, Shi Tu, et al. Optical free-form surfaces testing technologies [J]. Chinese Optics, 2017, 10(6): 283-299. (in Chinese) [27] Nakamura O, Goto M. Four-beam laser interferometry for three-dimensional microscopic coordinate measurement [J]. Applied Optics, 1994, 33(1): 31-36. doi: 10.1364/AO.33.000031 [28] Takasuji T, Goto M, Kurosawa T, et al. The first measurement of a three-dimensional coordinate by use of a laser tracking interferometer system based on trilateration [J]. Measurement Science and Technology, 1998, 9(1): 38. doi: 10.1088/0957-0233/9/1/006 [29] Ma Yixin, Lu Feng, Wang Hongwei, et al. Dynamic measurement gross error detection model of laser tracker based on prior information [J]. Beijing Surveying and Mapping, 2020, 34(11): 1516-1519. (in Chinese) [30] Qiao Guifang, Sun Dalin, Wen Xiulan, et al. Modeling and analysis of sequential multi-lateration measurement system based on single laser tracker for robot calibration [J]. Acta Metrologica Sinica, 2020, 41(11): 1313-1320. (in Chinese) doi: 10.3969/j.issn.1000-1158.2020.11.01 [31] Anderson D S, Burge J H. Swing-arm profilometry of aspherics [C]//Proceedings of SPIE, 1995, 2536: 169-179. [32] Zeng A, Yu K T, Song S, et al. Multi-view self-supervised deep learning for 6d pose estimation in the amazon picking challenge [C]//IEEE International Conference on Robotics and Automation, 2017. [33] Wen Zhuoman, Wang Yanjie, Di Nan, et al. Fast recognition of cooperative target used for position and orientation measurement of space station’s robot arm [J]. Acta Aeronautica et Astronautica Sinica, 2015, 36(4): 1330-1338. (in Chinese) [34] 文婉欣, 张鑫, 白净. 一种基于单目视觉的智能机械臂系统[J]. 石河子科技, 2020, 254(6): 37-39. doi: 10.3969/j.issn.1008-0899.2020.02.018 [35] Hvisc A M, Burge J H. Alignment analysis of four-mirror spherical aberration correctors [C]//Astronomical Telescopes Instrumentation, International Society for Optics and Photonics, SPIE, 2008, 7018: 701819. [36] Cao Yuze, Ma Wen. Application of two step sensitivity matrix method in Cassegrain telescope alignment [J]. Opto-Electronic Engineering, 2020, 47(2): 180536. (in Chinese) doi: 10.12086/oee.2020.180536 [37] Wang Yu, Zhang Xin, Wang Lingjie. Freeform optical system alignment based on artificial neural networks [J]. Acta Optica Sinica, 2013, 33(12): 1211001. (in Chinese) doi: 10.3788/AOS201333.1211001 [38] Liang Qiongxin, Huang Jinlong, Pan Nian, et al. Alignment method of large aperture telescope based on eigen coefficient [J]. Laser & Optoelectronics Progress, 2021, 58(12): 1211001. (in Chinese) [39] Nanos K, Papadopoulos L. On Cartesian motions with singularities avoidance for free-loating space robots [C]//IEEE lnternational Conference on Robotics and Automation, 2012: 6224695. [40] Jia Zhen, Lou Junqiang, Yang Yiling, et al. Experimental identification and servo velocity-based vibration suppression of a rotating flexible manipulator system [J]. Journal of Vibration and Shock, 2020, 39(24): 76-83. (in Chinese) [41] Li Heyu, Lin Tingyu, Zeng Bi. Control method of space manipulator by using reinforcement learning [J]. Aerospace Control, 2020, 38(6): 38-43. (in Chinese) doi: 10.3969/j.issn.1006-3242.2020.06.007 [42] Cheng Jing, Chen Li. Mechanical analysis and calm control of dual-arm space robot for capture a sitellite [J]. Chinese Journal of Theoretical and Applied Mechanics, 2016, 48(4): 823-834. (in Chinese) doi: 10.6052/0459-1879-16-158 [43] Li Shuo, Li Xixing, Zhao Yan. Optimization of trajectory tracking control in task space for dual-arm space robot [J]. Journal of Mechanical Transmission, 2020, 44(10): 80-85. (in Chinese) [44] Hu Ruixin, Long Changyu, Zhang Lijian. Robotic assembly technology for satellite component based on visual and force information [J]. Optics and Precision Engineering, 2018, 26(10): 2505-2515. (in Chinese) [45] Ai Haiping, Chen Li. Force/position control of dual-arm space robot capture spacecraft [J]. Journal of Harbin Engineering University, 2020, 41(12): 7. (in Chinese) doi: 10.11990/jheu.201812041 [46] Leutenegger S. BRISK: Binary robust invariant scalable keypoint [C]//Proceedings of the 13th IEEE International Conference on Computer Vision, 2011: 2548-2555. [47] Strecha C, Bronstein A, Bronstei M, et al. LDAHash improved matching with smaller descriptors[J]. IEEE Trans on Pattern Analysis and Machine Intelligence, 2012, 34(1): 66-78. -

 点击查看大图
点击查看大图
计量
- 文章访问数: 289
- HTML全文浏览量: 120
- PDF下载量: 61
- 被引次数: 0

