



 下载:
下载:



-
由于激光半主动制导武器有高精度、低成本、结构简单等独特的优势,在现代战争中扮演着越来越重要的角色,许多国家竞相研发激光半主动制导武器[1-3]。激光半主动导引头是激光制导武器的重要组成部分,由光学头罩、激光半主动镜头和四象限探测器构成,其作用是探测目标所反射的激光能量,依据制导规律反馈对应参数给控制系统,实现弹道修正,进行精准打击[4-5]。
目前,激光半主动光学镜头的检测多在整机阶段进行[6-8],现有资料少有针对单独激光半主动镜头的检测评价手段,对于镜头整体性能指标缺乏定量的评价方法,激光半主动镜头综合测试设备的研制将大幅提高激光半主动镜头的可靠性,缩短问题处理周期。激光半主动光学系统光斑均匀性、圆度是影响制导精度的关键参数,因此激光半主动镜头综合测试设备需要具有“看到”光斑大小的功能,同时也需要具有“感受”光斑能量的功能。因此,亟需配备激光半主动光学系统综合测试设备,以全面评价系统光学性能,提升产品质量,进而提高制导精度。
-
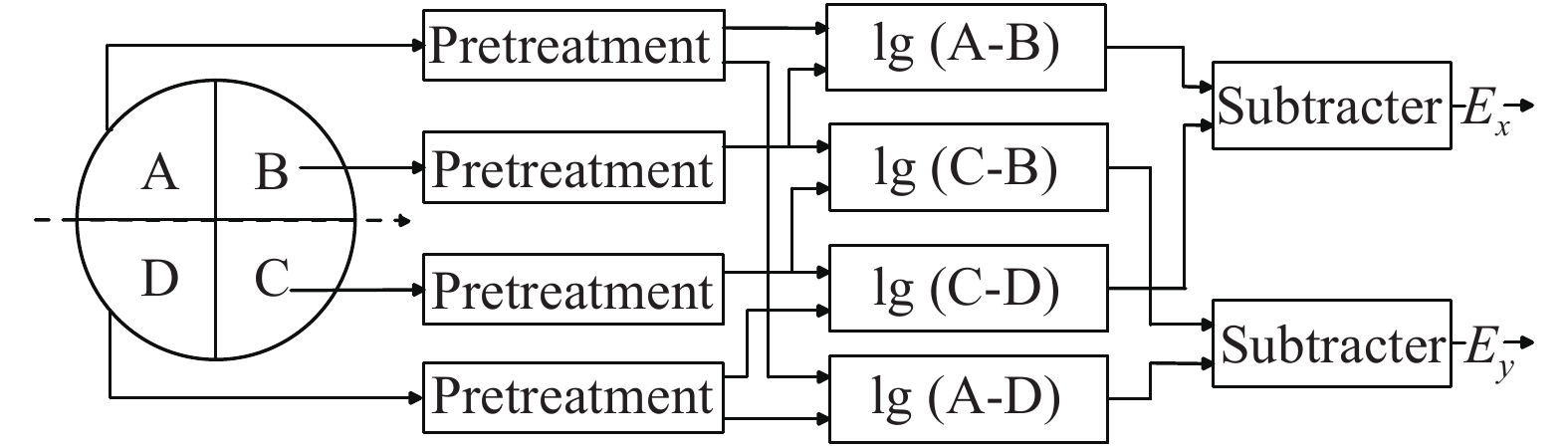
在激光半主动寻的制导中,根据分布在探测器不同象限的光斑能量进行信号处理,读取角度偏差值,对信号的角度偏差进行计算,进而得到信号与光轴的夹角,调整导弹飞行方向,对准目标。
角度偏差是通过对四象限探测器输出的各象限信号幅值进行运算得出,且采用对数相减的运算方式,其运算原理见图1,以下两式用于计算角度偏差:
$${E_{{x}}} = \lg \left( {{S_{\rm A}} - {S_{\rm B}}} \right) - \lg \left( {{S_{\rm C}} - {S_{\rm D}}} \right)$$ (1) $${E_{{y}}} = \lg \left( {{S_{\rm A}} - {S_{\rm D}}} \right) - \lg \left( {{S_{\rm C}} - {S_{\rm B}}} \right)$$ (2) 式中:SA、SB、SC、SD分别为光斑在四象限探测器中A、B、C、D象限对应的能量值强度;当目标位于视场中心时,Ex、Ey相等,导弹对准目标,可准确地飞向攻击目标。当Ex、Ey不等时,说明导弹与目标具有角度误差,通过实时处理Ex、Ey两者差值,不断自动修正导弹飞行方向,直至导弹准确对准目标,进行攻击。此运算方式可以实现高精度测角,对光斑大小及均匀性要求较高;光斑的大小及均匀性不符合要求将导致制导武器的制导效果变差。

图 1 四象限探测器工作原理
Figure 1. Operating principle diagram of four quadrant detector
-
激光半主动寻的制导中所接收的指示激光波长漂移较小,光学系统设计过程中仅需考虑单色像差对系统跟踪精度的影响,结合1.1节的分析,主要考虑像差对光斑能量均匀性分布与光斑大小的影响[9]。根据以上两方面,将像差分为非对称、对称像差。非对称像差主要影响轴外视场光斑能量均匀性分布,间接影响光斑大小,包含彗差、像散、场曲、畸变;对称像差主要影响光斑大小,主要为球差。
明确单色像差对半主动光学系统的影响后,可得到构建其光学系统的原则:(1)根据轴上光线球差与目标光斑大小确定光学系统的初始结构与调焦量;(2)在得到光学系统初始结构后,优化非对称像差提高光斑能量均匀性,得到满足设计要求的光学系统。
等效焦距是光学系统的重要参数,也是光学系统设计的关键参数之一。对于远物距激光半主动光学系统,按公式(3)确定等效焦距
$f'$ :$$f' = \frac{D}{{2 \cdot \tan ({{\rm FOV} / {2)}}}}$$ (3) 式中:D为探测器光敏面直径;FOV为全视场角。
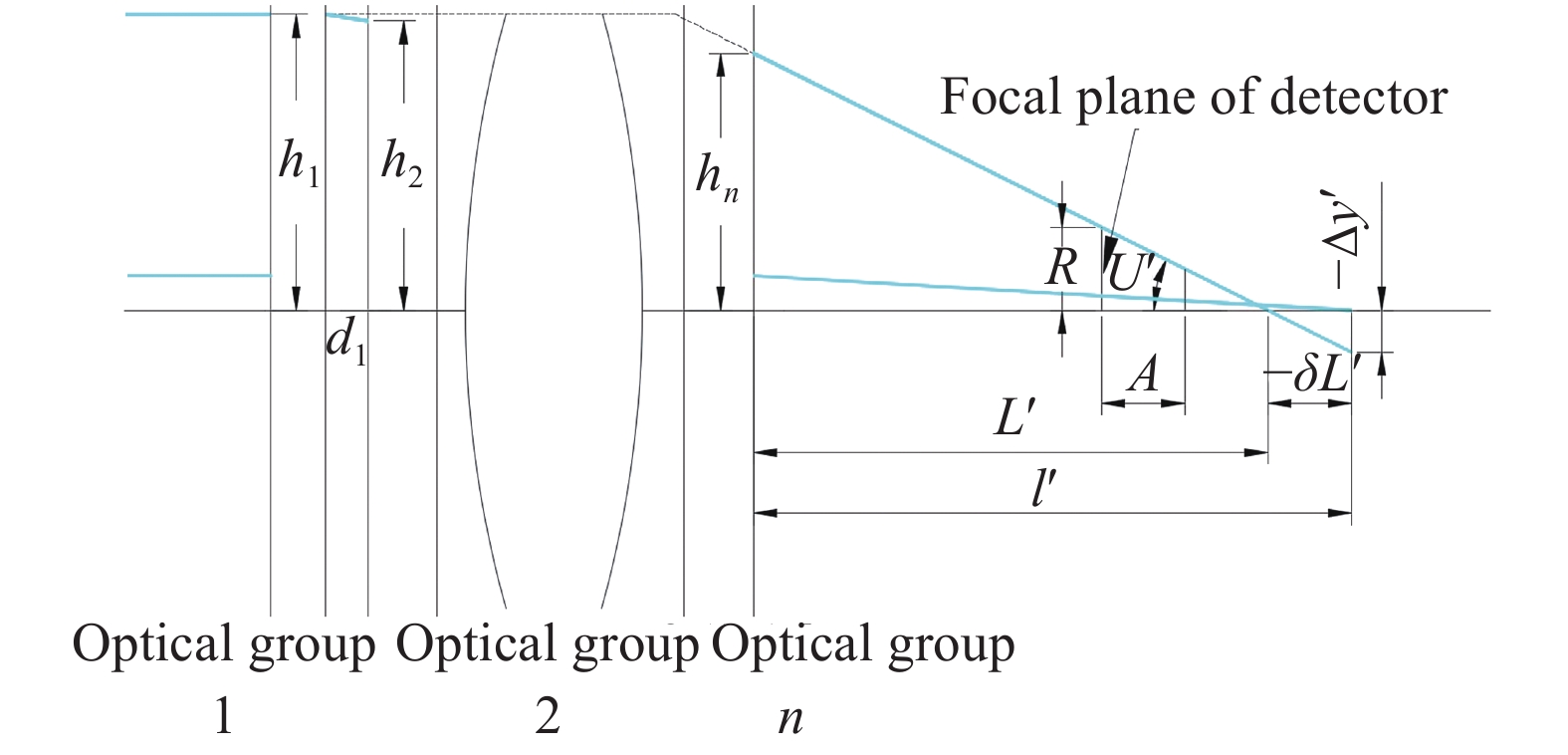
图2为激光半主动光学系统原理图,其中,光学系统是由多个透镜组组合而成的,
$f'$ 为系统等效焦距,d为各个透镜组之间的间隔,l′为系统的近轴像距,L′为边缘光线的像面距离,Δy′为垂轴球差,要保证半主动系统的光斑大小,透镜组的光焦度分配以及轴向球差与离焦量的对应关系应满足以下公式:$$ \sum\limits_{{{i}} = 1}^{{j}} {{{{h}}_{{i}}}{\varPhi _{{i}}}} = \varPhi $$ (4) $${\rm{tan}} (U') = \frac{R}{{A{\rm{ + }}\left( { - \delta L'} \right)}} = {h_1} \cdot \varPhi $$ (5) 式中:hi为入射光线在各透镜组的高度;R为像面的光斑半径;Φ为系统光焦度;Φi为各个透镜组的光焦度;U′为像方孔径角;δL′为轴向球差;A为后工作距调节量。
在激光半主动光学系统设计时,可通过赋予不同的球差与离焦量设计出不同初始结构的光学系统,最终光学系统结构形式也不尽相同。
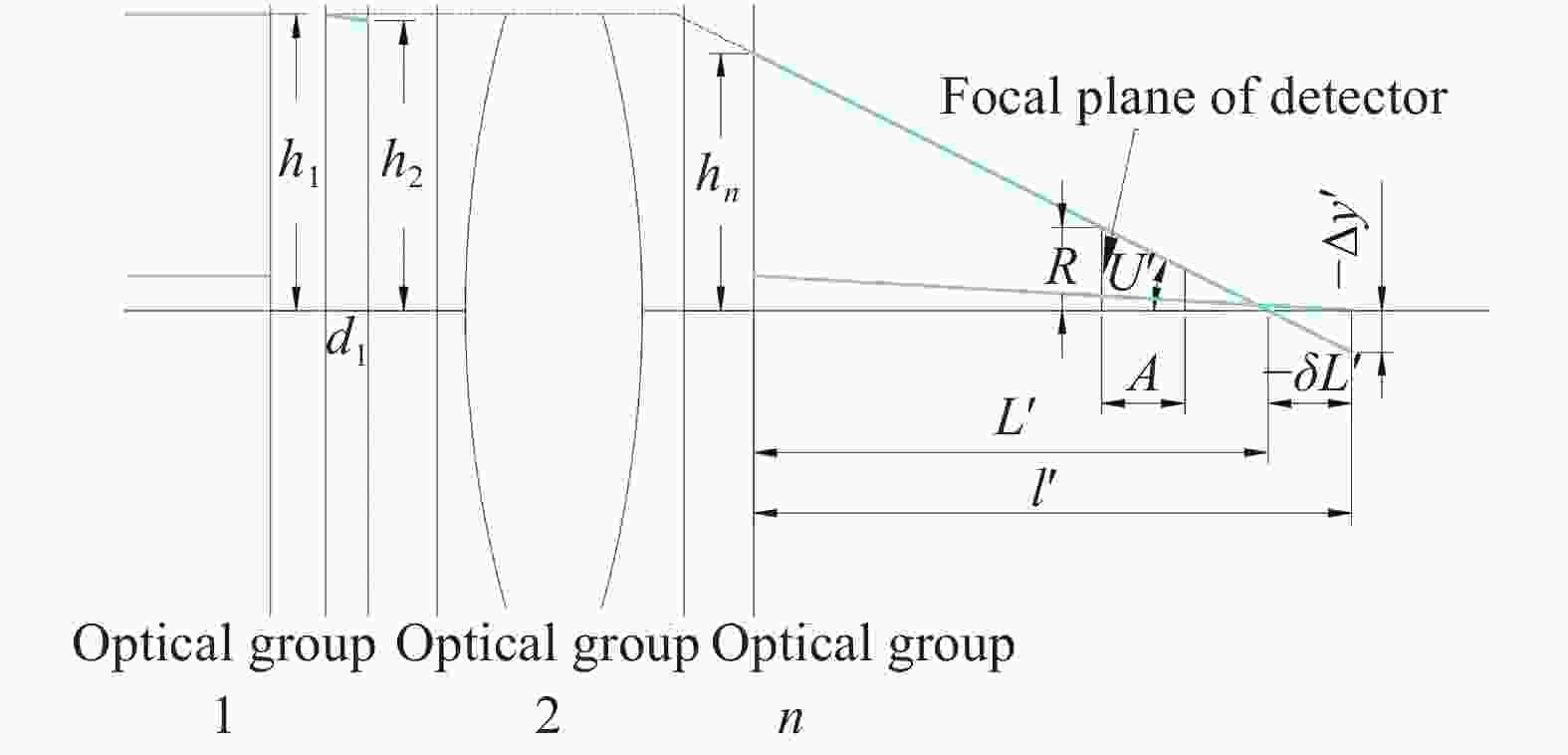
图 2 激光半主动光学系统原理图
Figure 2. Sketch of laser semi-active optical system
-
相对于激光光谱响应探测器近15万元的售价,可见光COMS探测器价格不足千元,价格相差约150倍,为了实现对镜头低成本检测,激光半主动光学系统设计时,要同时对系统进行谱段迁移的可视化检测设计。可视化检测方案选用可见光探测器、632.8 nm光源搭建低成本的可视化检测系统。
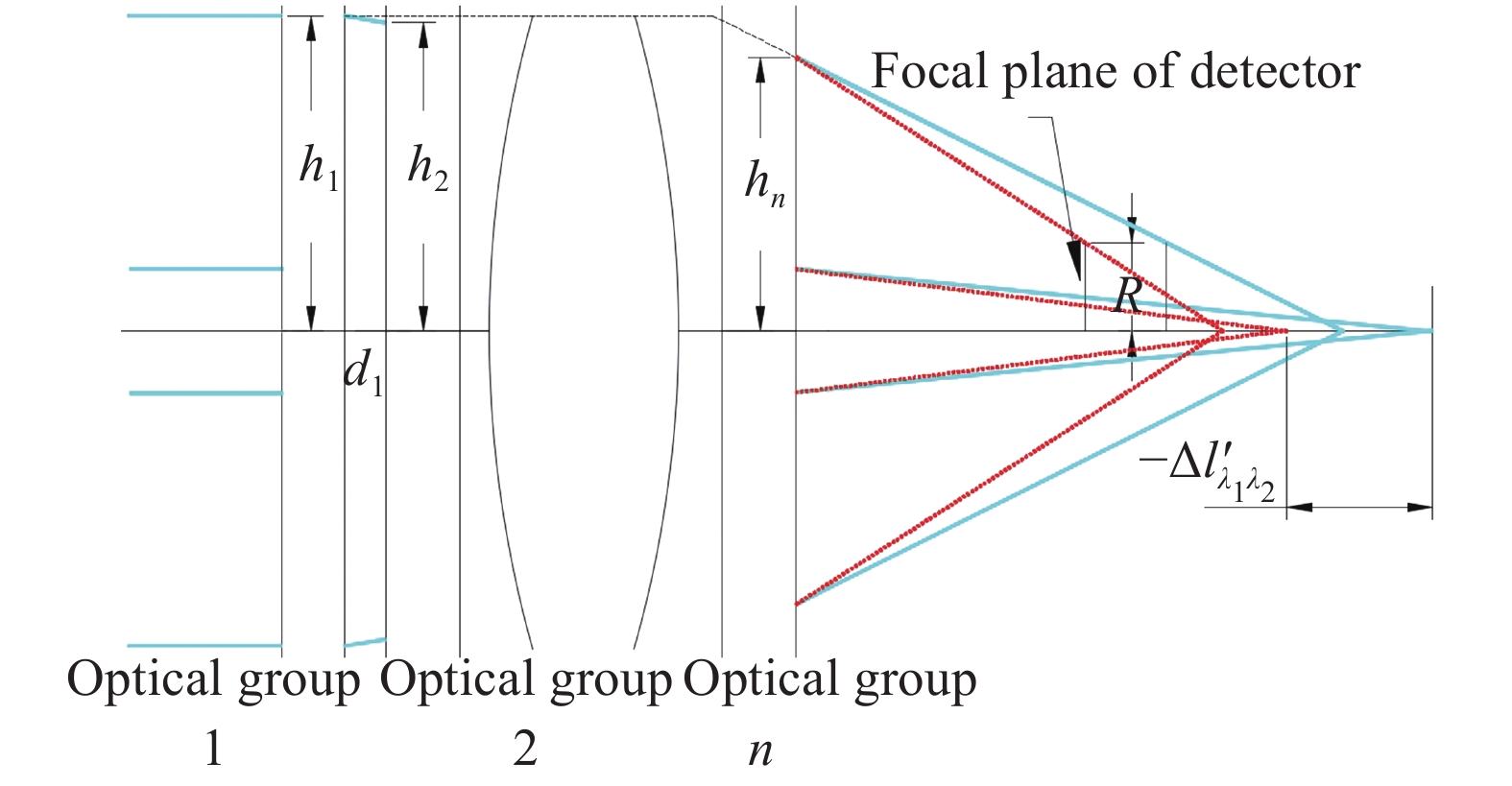
(1)光斑大小检测原理:由于折射率是光波波长的函数,光学材料对短波长的折射率要比长波长大,造成短波长在透镜的表面有更强的折射。见图3,选用可见光波段波长(632.8 nm,图3中红色光线),对应产生该波长下的球差和该波长与激光波长(1064 nm,图3中蓝色光线)产生的色差Δlλ1λ2′,进而得到632.8 nm光谱对应离焦位置的光斑大小。同时根据公式(5)可以得出对应波长(632.8 nm)相同光斑口径的理论离焦量,从而明确可见光探测器与镜头的相对位置,进行光斑大小的间接检测。
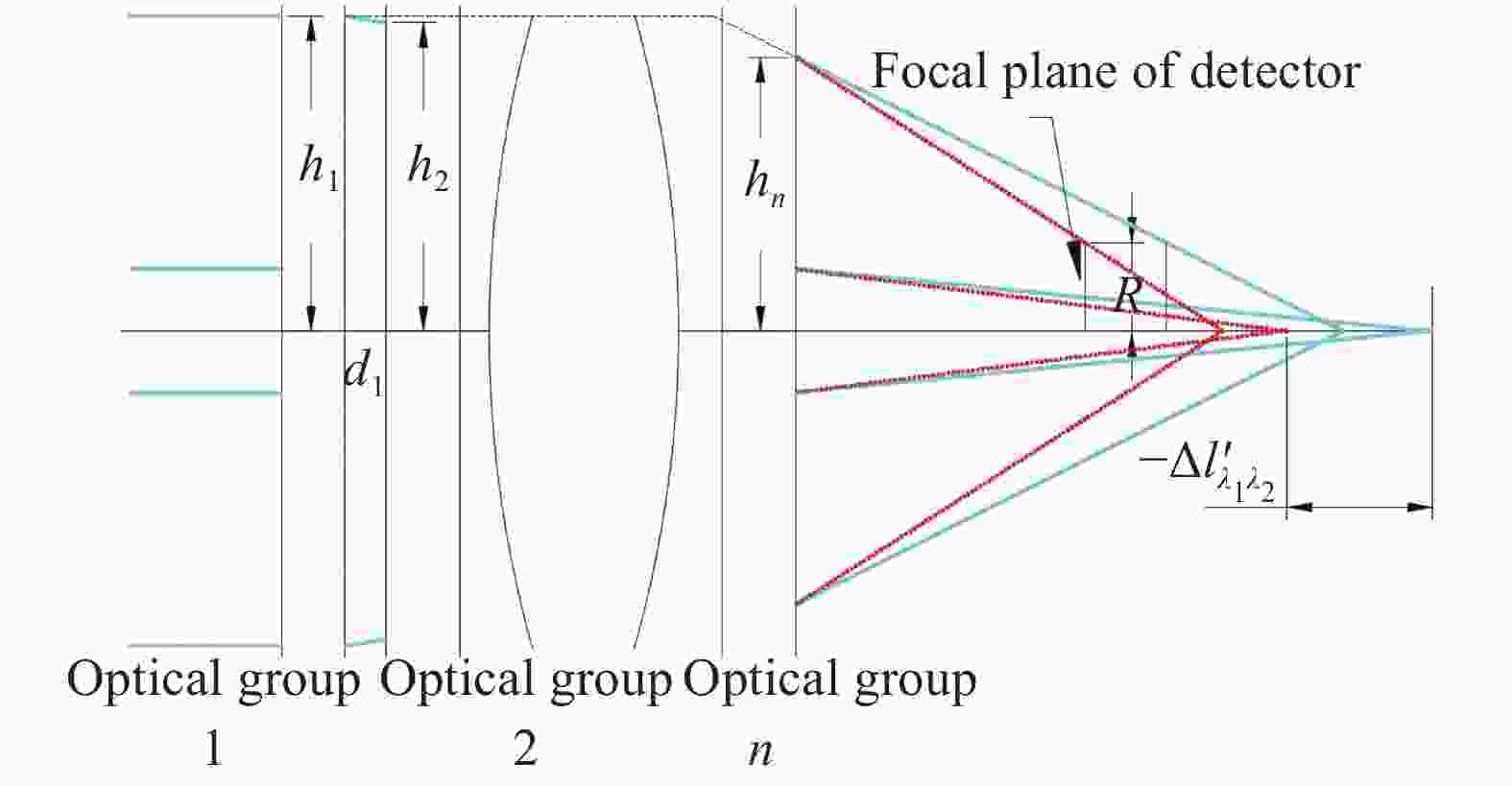
图 3 低成本可视化检测原理图
Figure 3. Sketch of low-cost visual testing
(2)光斑能量均匀性检测原理:像差改变及镀膜会影响光斑汇聚状态,对光斑均匀性带来影响。因此,需采用间接测量方法。首先,在仿真软件中分析1064 nm波长下光斑均匀的光学系统在632.8 nm波长下光斑均匀性;之后对632.8 nm波长下光斑均匀性进行测试,与仿真分析结果进行对比;若两者一致,则可代表光学系统在1064 nm波长下光斑均匀。
(3)透镜倾斜光斑状态检测原理:通常光学系统存在鬼像通道,透镜倾斜后,鬼像通道形成光斑,偏离光斑中心。通过镀制在1064 nm波段处反射率低、在632.8 nm波段处反射率高的膜层,提高关注鬼像光斑的能量,依据该现象,可作为检测镜头透镜倾斜的依据,进而快速筛选不合格镜头。
-
光学系统技术指标如下:工作波段,1064 nm;通光口径,32 mm;视场(FOV),±9.2°;线性视场,±4.6°;光敏面尺寸,Φ10 mm;光斑大小,Φ5 mm。
-
由公式(3)得到光学系统的焦距f′=30.8 mm,由公式(4)、(5)可知
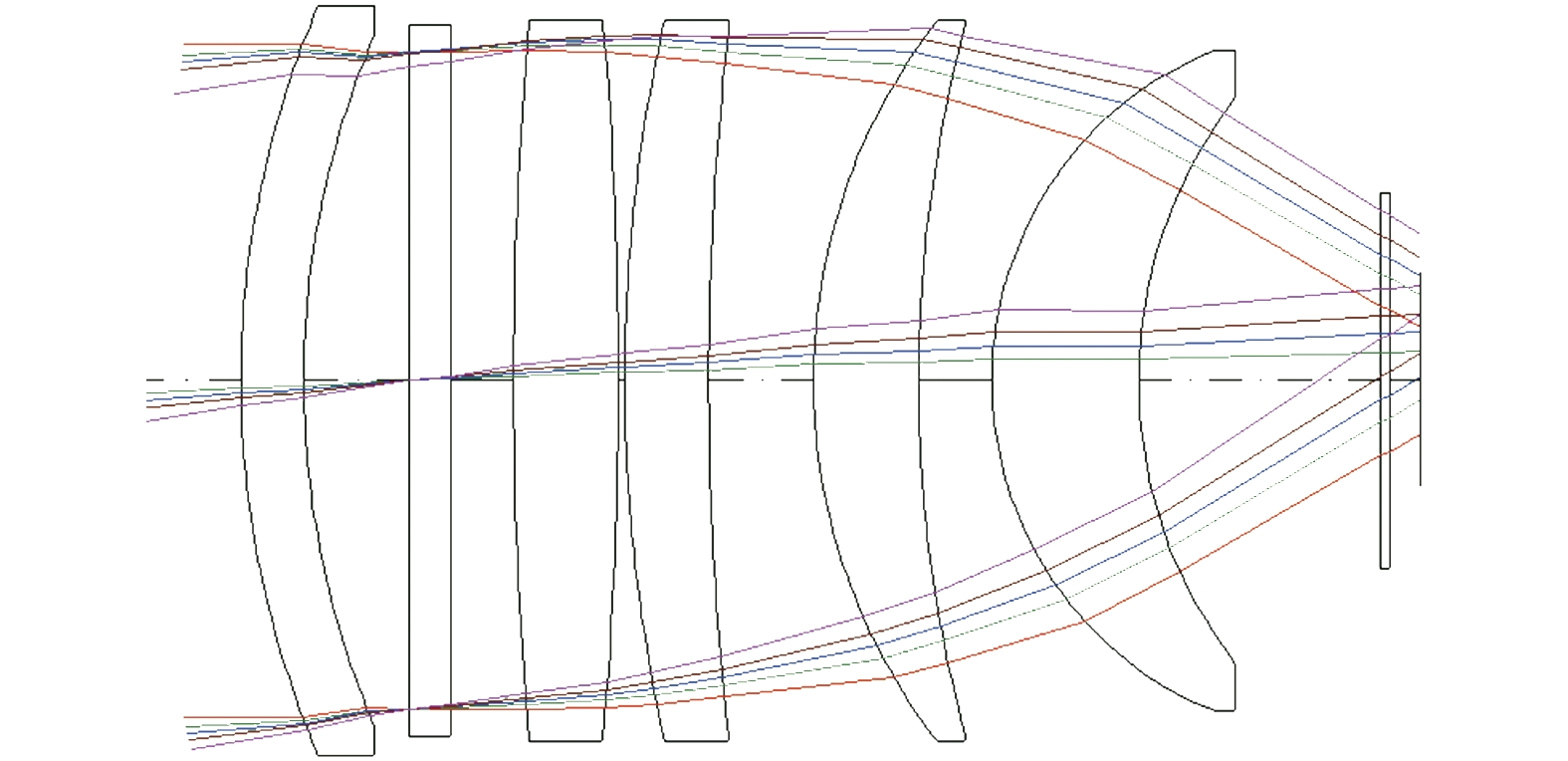
$A{\rm{ + }}\left( { - \delta L'} \right)$ =4.8 mm。系统通过四片正透镜得到负球差,结合离焦设计满足特定的光斑大小要求;通过控制透镜形状以及使用不同的光学材料控制非对称像差,进而实现光斑的均匀性的要求;最终光学系统外形结构见图4,系统F#为0.94,视场角为18.4°(±9.2°)。对应的透镜表面均为球面,透镜1的第1面为孔径光阑,这样有利于减小系统的孔径,系统是由光学头罩、滤光片、及四片透镜组成,考虑到成本和工艺性,四片透镜采用H-K9L、H-ZF6两种常见的光学材料。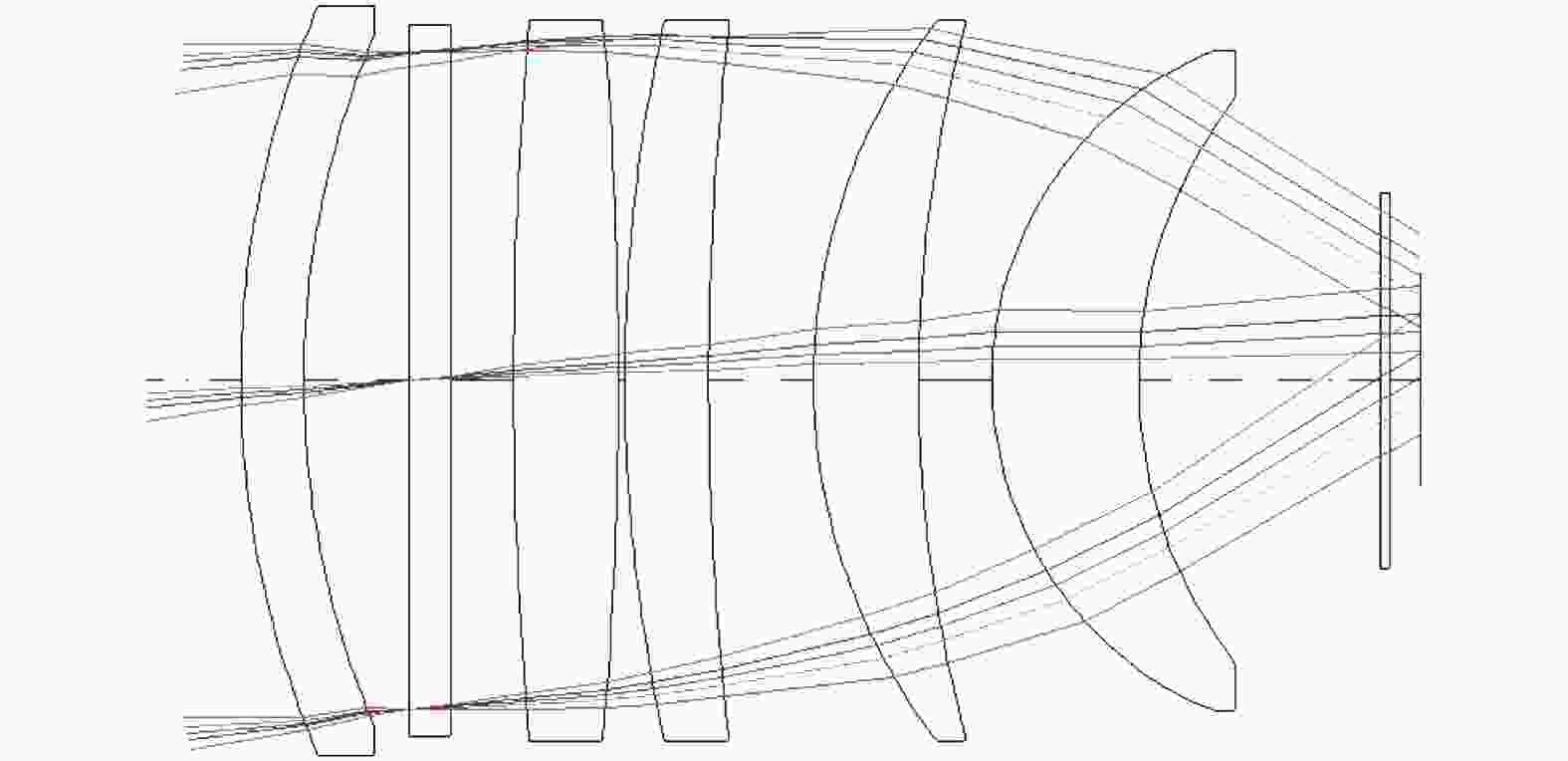
图 4 光学系统外形结构
Figure 4. Optical system structure
-
激光半主动系统中光斑点列图能够体现不同视场的光斑大小、光斑圆度及对称度,同时可从中分析光斑的均匀性,光学系统各视场光斑点列图分布见图5(a)。从图中可以看出,0°、2.8°、4.6°、6.4°、9.2°视场光斑直径大小分别为5.05 mm、4.99 mm、4.86 mm、4.77 mm和4.45 mm,光学系统在线性视场角度范围内光斑尺寸变化不大,圆度及对称度较好。
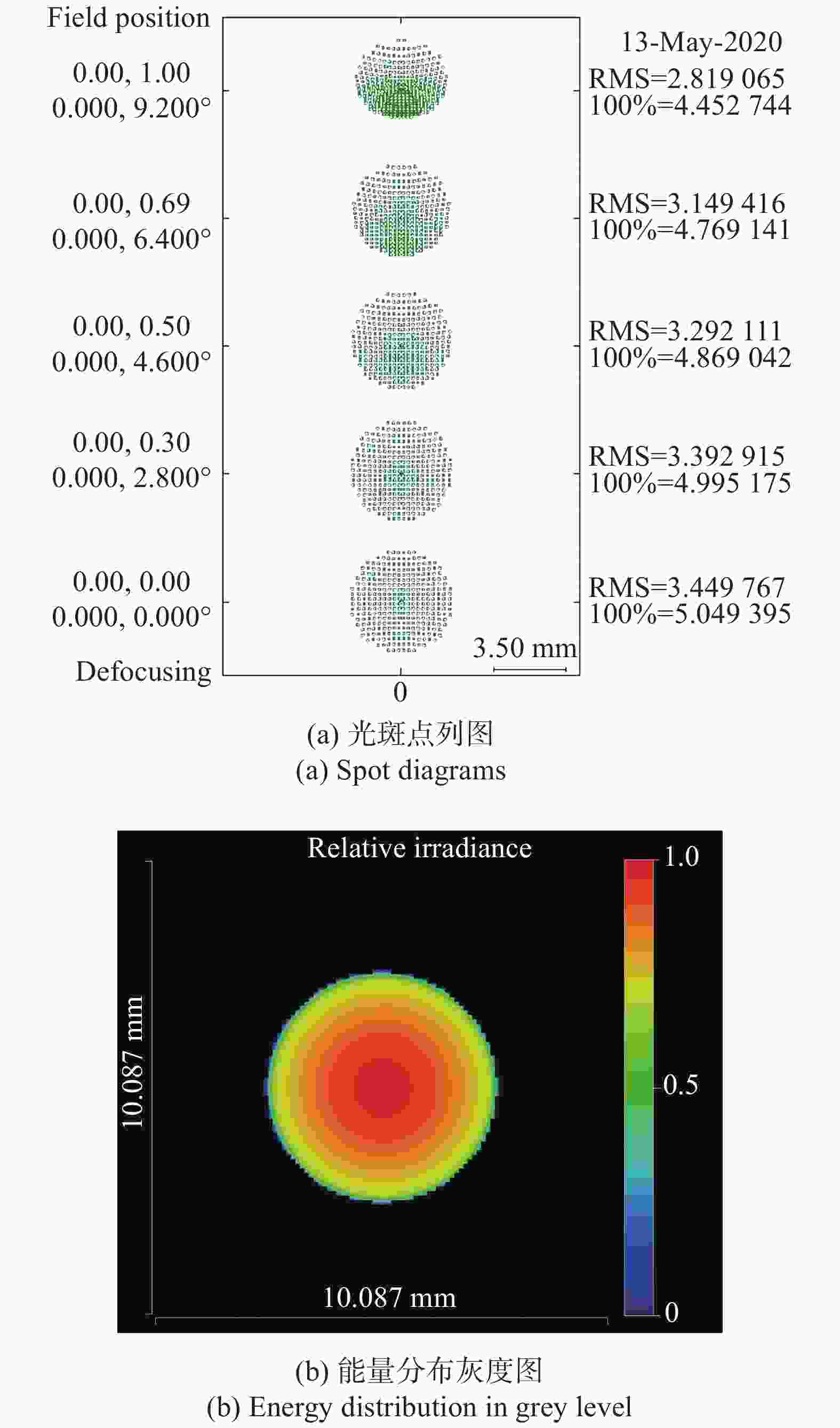
图 5 不同视场下光斑
Figure 5. Spot of different field
-
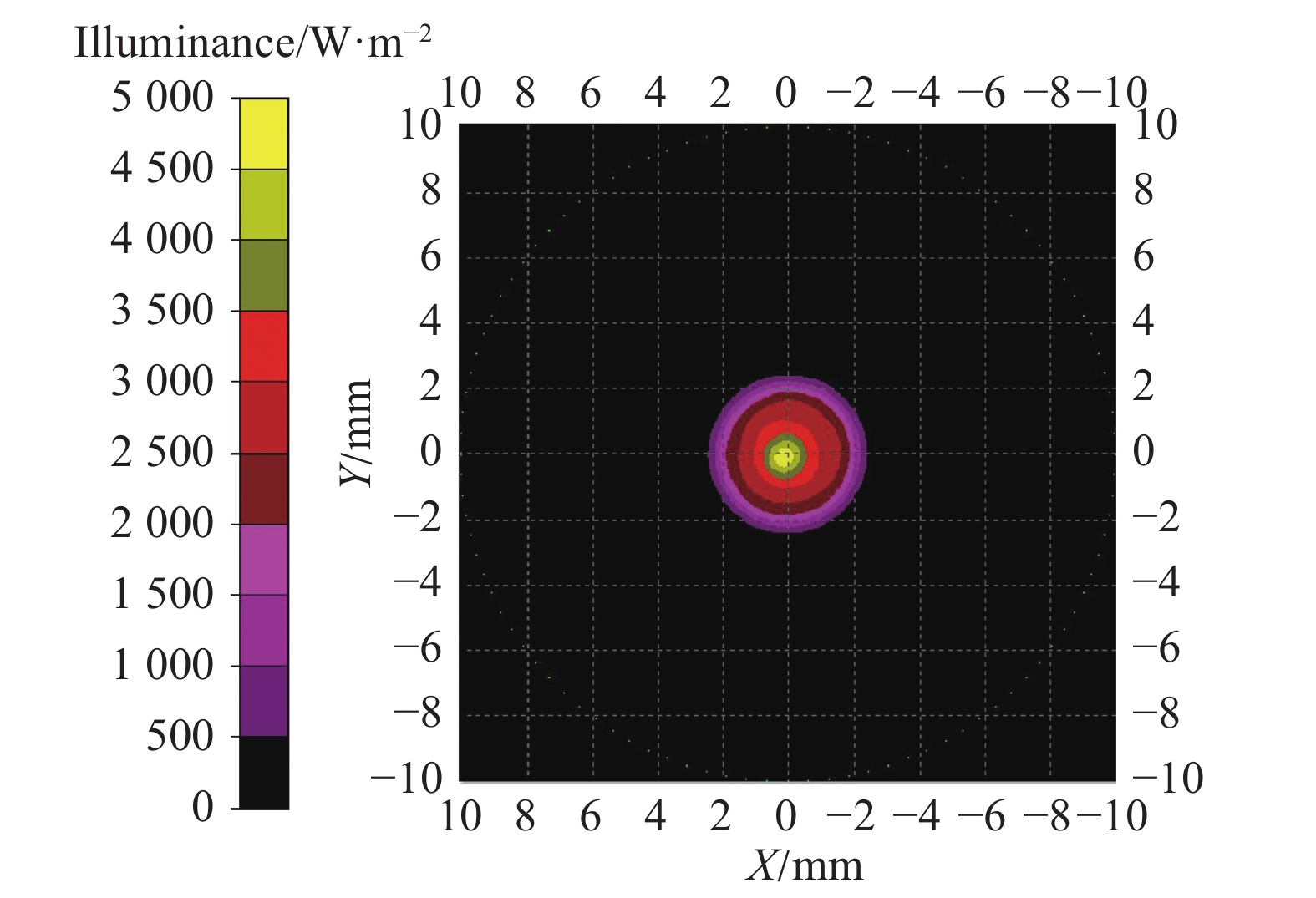
除了光斑圆度与对称度外,光斑均匀性也是激光半主动类光学系统的重要性能指标,因此对光学系统进行了光线追迹,得到的光斑能量分布见图5(b),从中得到光学系统像面光斑分布较均匀。
-
经分析,系统光学透镜的加工公差对光斑质量影响较小;同时文中系统为普通装校镜头,透镜的倾斜误差较大,且系统中透镜3与透镜4的倾斜误差对光斑质量影响大,当透镜3与透镜4各自相对镜筒倾斜0.5°时,0°视场光斑仿真结果见图6,可看出透镜倾斜后的光斑能量左下半部分强,右上半部分较弱,分布不均匀。因此,在系统可视化检测设计时,要着重关注透镜3、透镜4的倾斜情况。
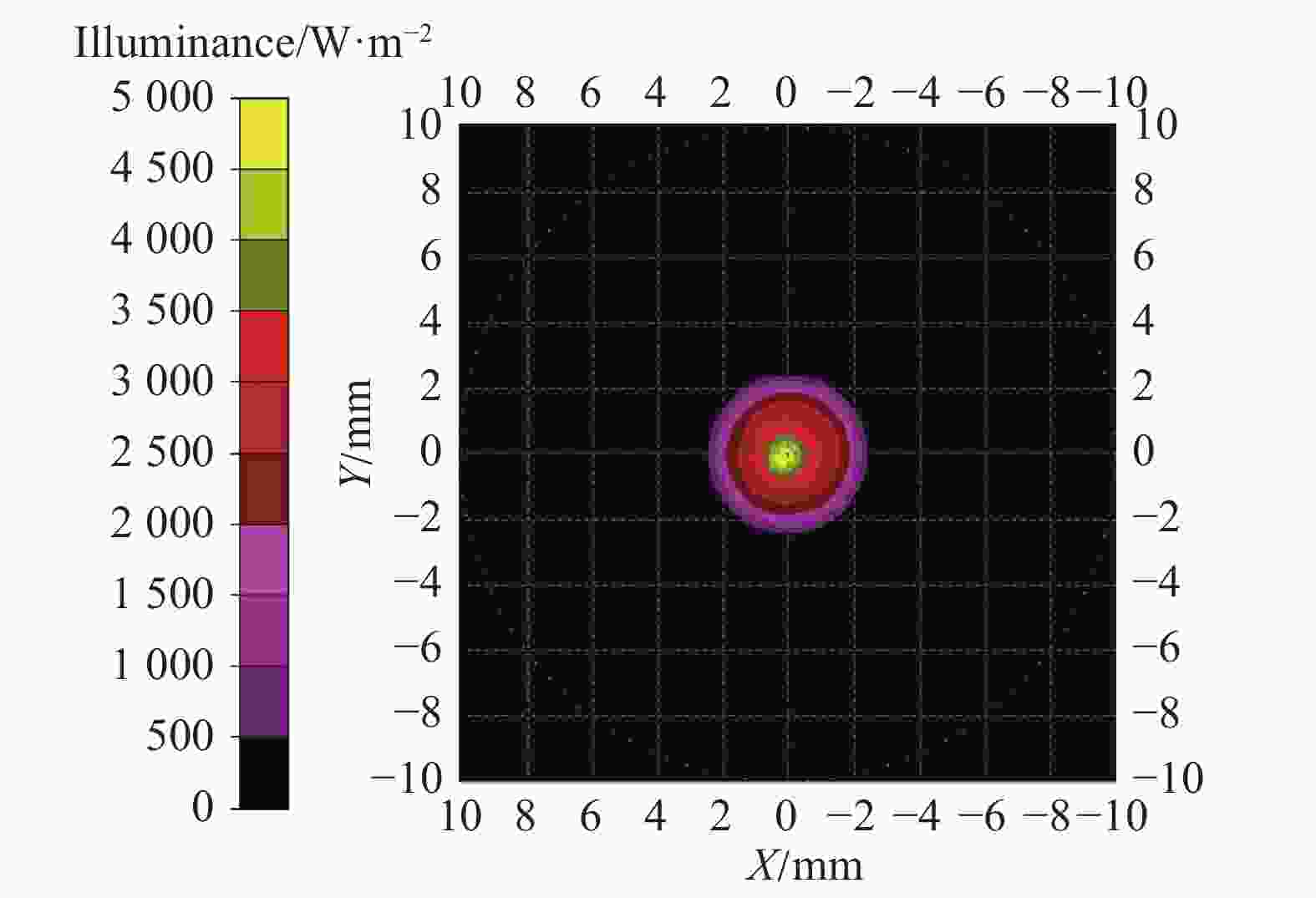
图 6 0°视场光斑均匀度仿真结果
Figure 6. Simulation results of 0° field of view spot uniformity
-
在照明分析软件中,对镜头开展鬼像分析时,发现透镜3后表面和透镜4后表面存在鬼像通道,如图7所示,当透镜表面剩余反射率高时,该通道将在像面形成圆斑。该通道与透镜3、透镜4直接相关,可利用该鬼像通道对透镜3、透镜4的倾斜进行监控,依据可视化检测要求,对光学透镜膜层提出在632.8 nm表面剩余反射大于30%、在1064 nm表面剩余反射小于1%的要求。
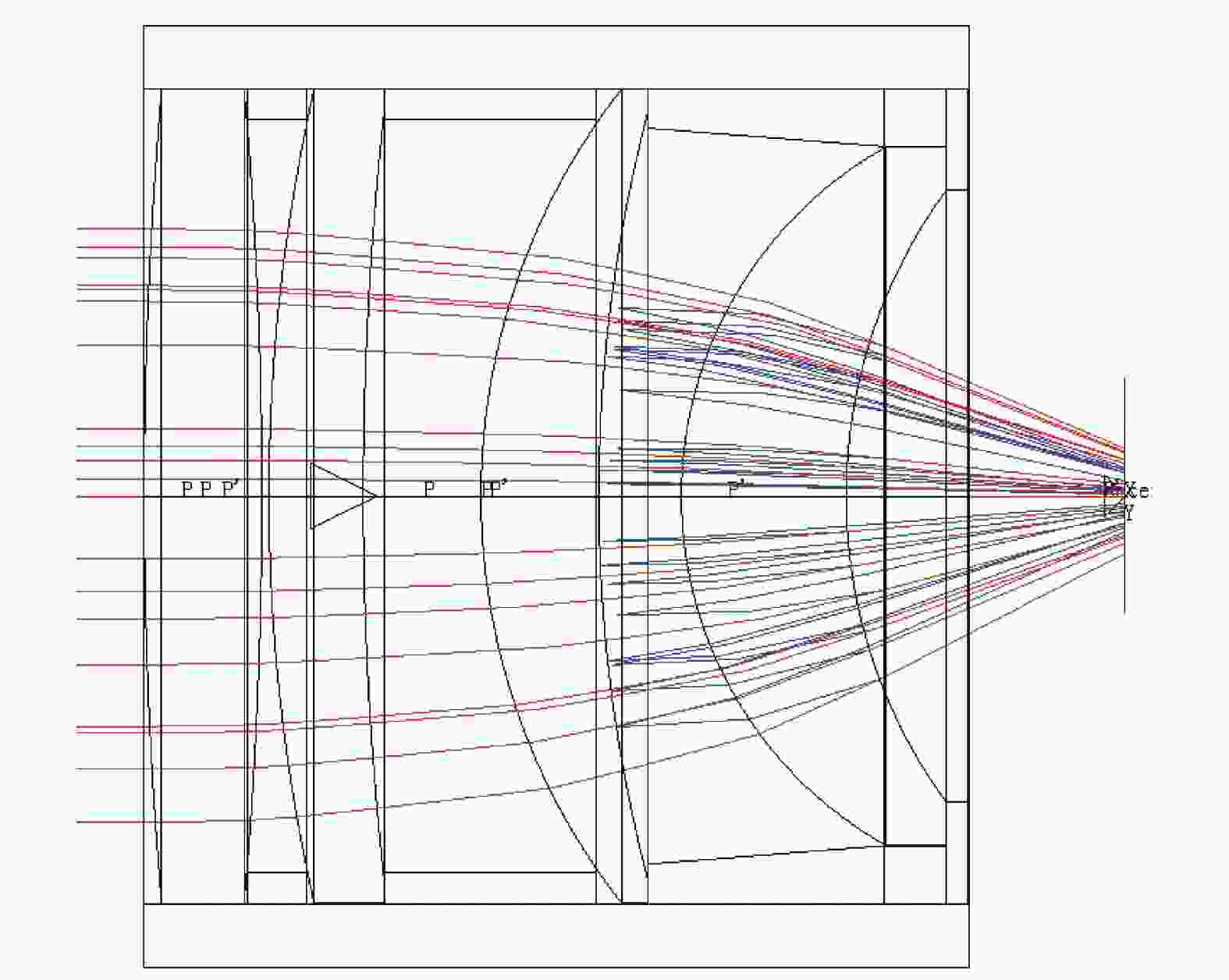
图 7 镜头仿真分析
Figure 7. Lens simulation analysis
(1)光斑大小分析:调整光学镜头后工作距,可视化检测系统在632.8 nm波长、0°平行光入射状态下,在探测器光敏面处接收光斑,见图8(a),从图中可以看出:632.8 nm的0°平行光入射后,两个圆形光斑呈叠加状态;其中尺寸较大的圆形光斑为设计光斑(图7中红色光线部分产生),光斑直径大小为5 mm。内部尺寸较小的圆形光斑为透镜3后表面与透镜4前表面之间反射产生的鬼像(图7中蓝色光线部分引起)。
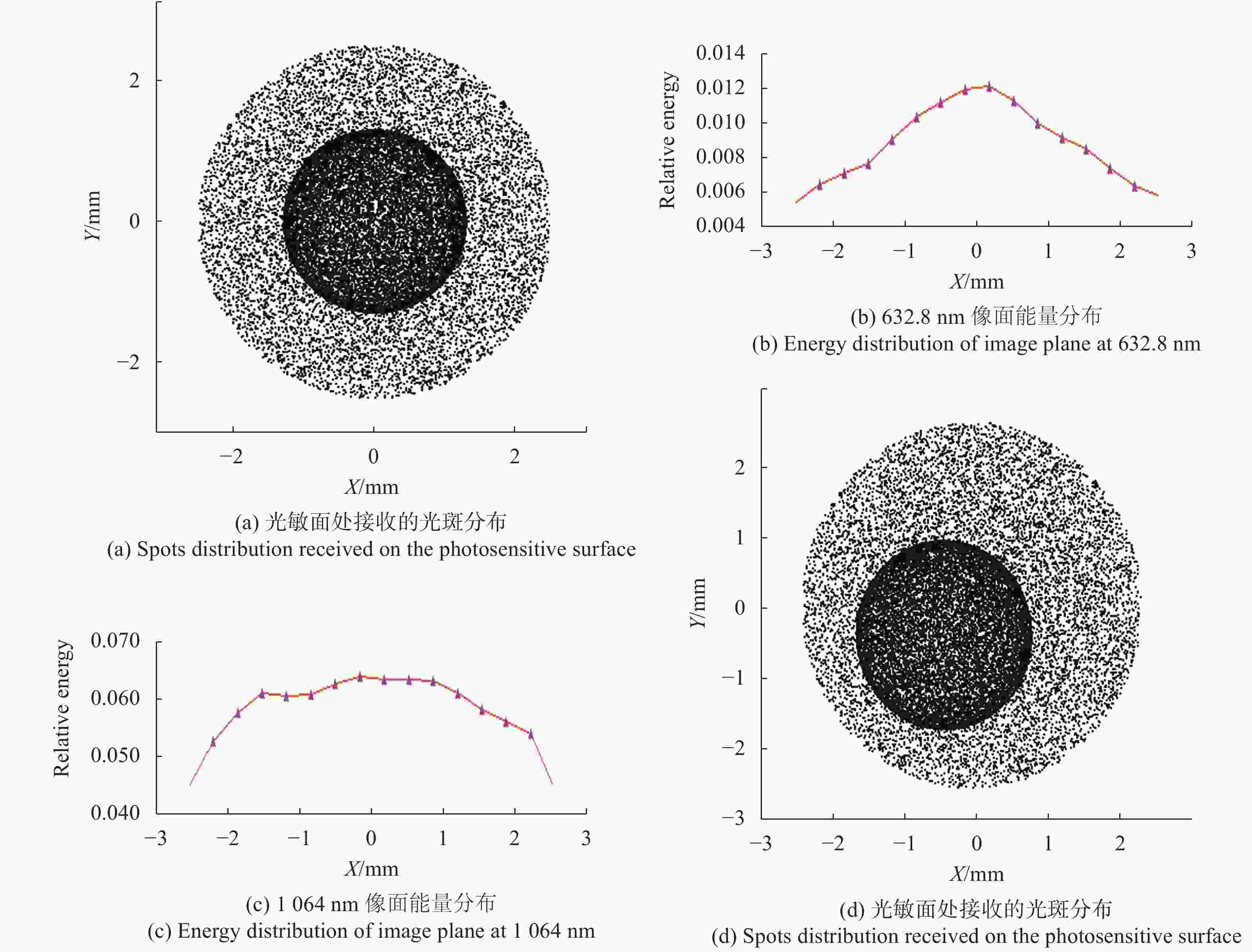
图 8 光斑分布
Figure 8. Spots distribution
(2)光斑能量均匀性分析:像面能量分布见图8(b),同状态下1064 nm波段的照度仿真见图8(c)。鬼像光斑叠加到正常光斑后呈现的光斑能量比正常光斑能量强;同时相较于1064 nm像面能量分布,632.8 nm下像面中心能量较高。
(3)透镜倾斜后光斑状态仿真分析:透镜3、4的倾斜误差对1064 nm波长下的光斑均匀性造成较为明显的影响,在632.8 nm波长下,透镜3、4倾斜相同角度时光斑状态见图8(d),透镜倾斜后,内部鬼像光斑偏离光斑中心。该现象可作为半主动镜头可视化检测的依据,进而快速筛选不合格镜头。
-
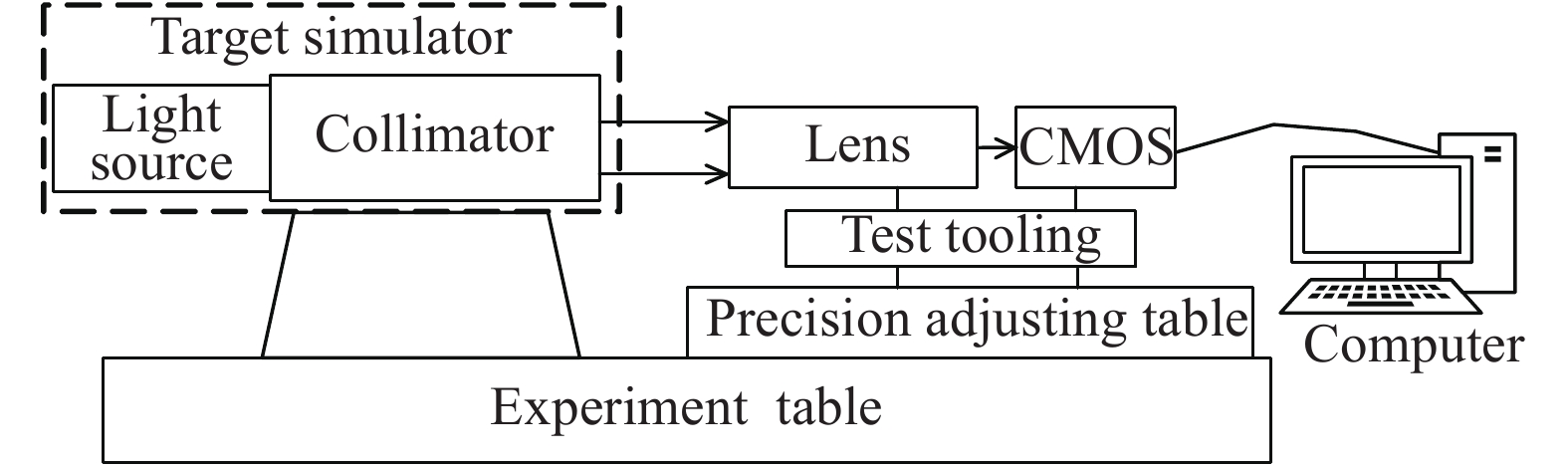
依据1.3节激光半主动镜头可视化检测的理论依据,搭建如图9所示激光半主动镜头可视化检测光路。该检测系统由光源、平行光管、待测光学镜头(未装配滤光片)及测试工装、CMOS、计算机组成。

图 9 可视化检测系统的原理图
Figure 9. Principle diagram of visual testing system
光源与平行光管共同组成了可见光目标模拟器,通过改变光源电流的大小实现目标模拟器的能量调节;使用可见光光源配合单波段滤光片,用于提供632.8 nm可见光单波段波长;测试工装可调整光学镜头与CMOS的间隔;待测光学镜头、测试工装及CMOS固定在精密转台上,可相对可见光目标模拟器进行转动,用于接收不同视场的平行光;目标模拟器出射的平行光进入待测镜头,并由CMOS接收,用于与仿真计算机的控制软件进行动态信息交换,最终完成待测镜头光斑大小及能量均匀性测试。
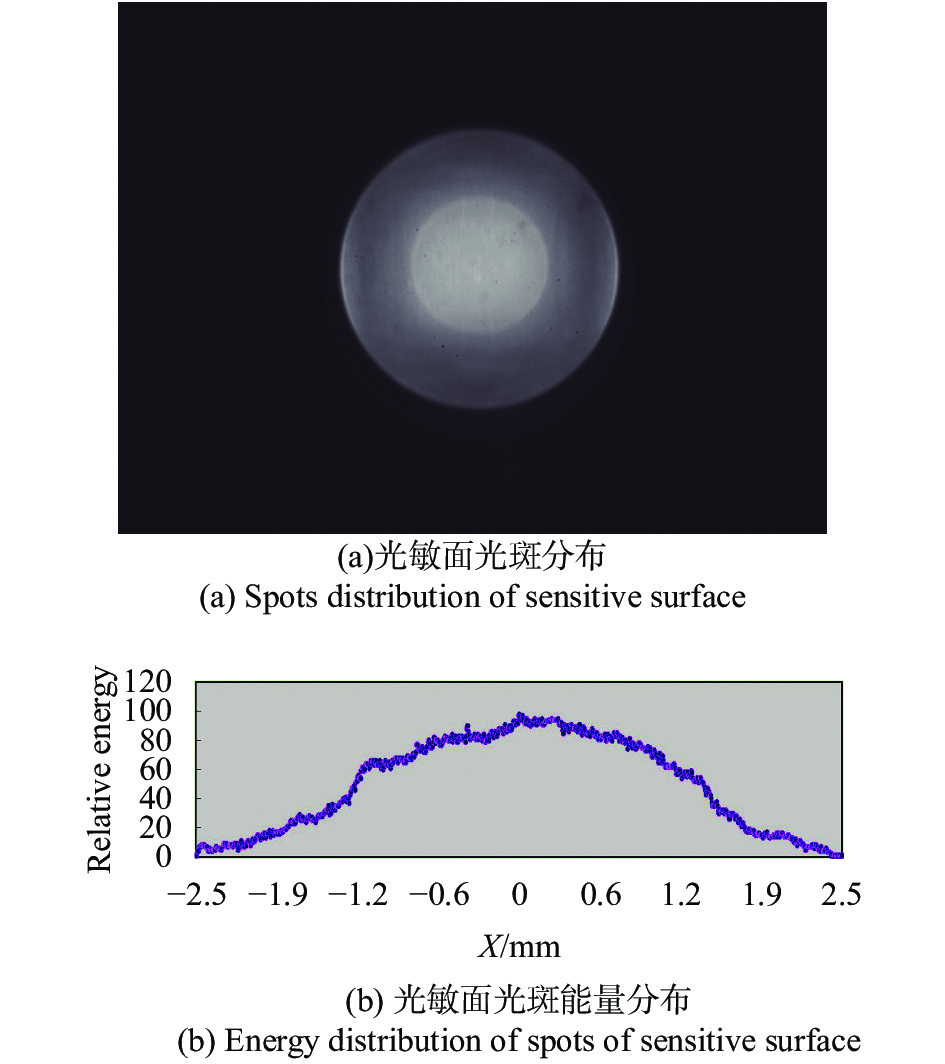
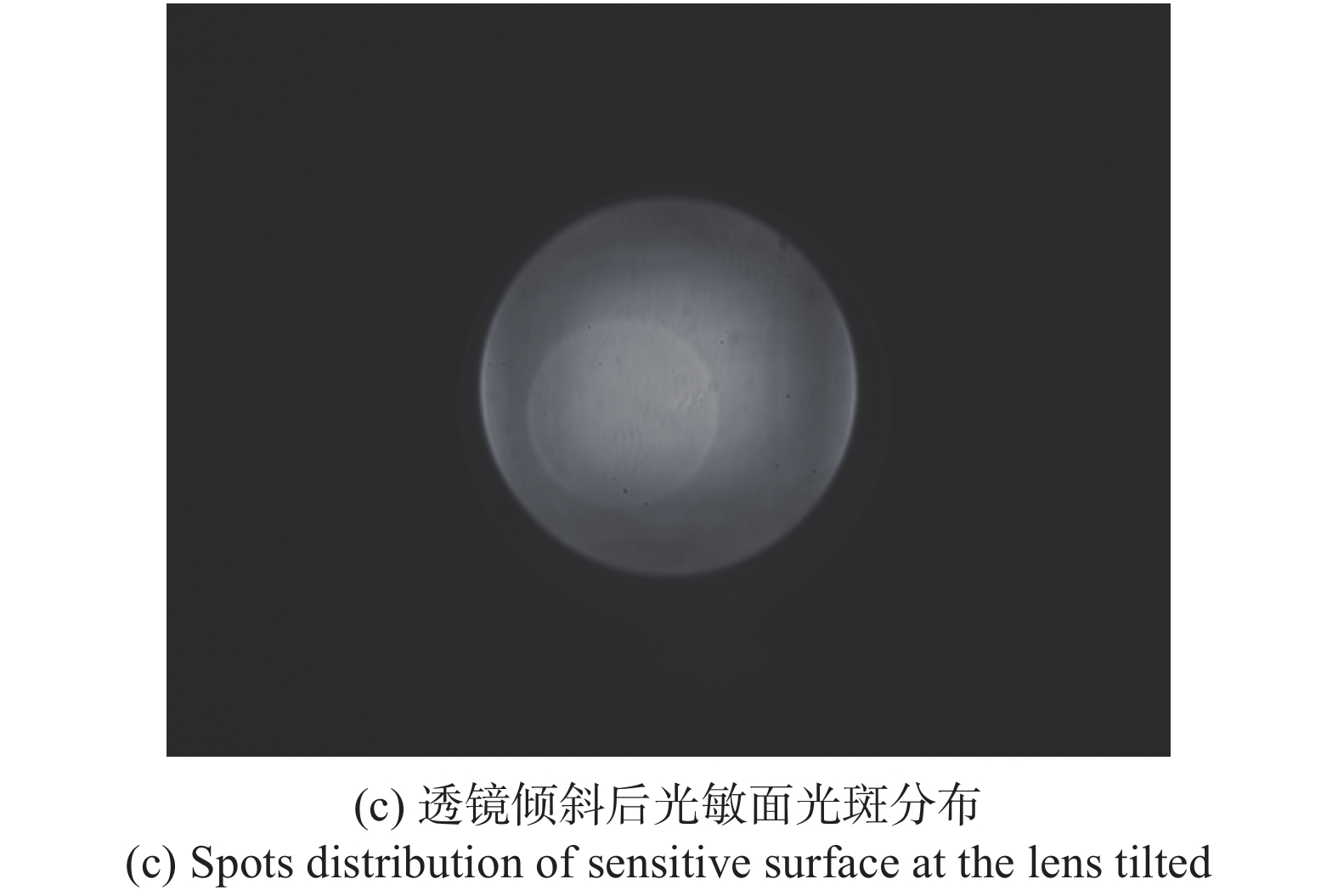
采集的光斑见图10(a),光斑能量均匀性分析见图10(b),光斑边缘清晰,光斑大小、形状与理论设计一致;实测能量分布与图8(b)能量分布趋势相同,满足设计指标要求。见图10(c),当透镜3、4倾斜时对镜头进行检测,检测后采集得到的光斑与理论分析一致,测试结果满足了可视化检测系统的使用需求,大幅提高了镜头检测效率、易于工程化、批量化。
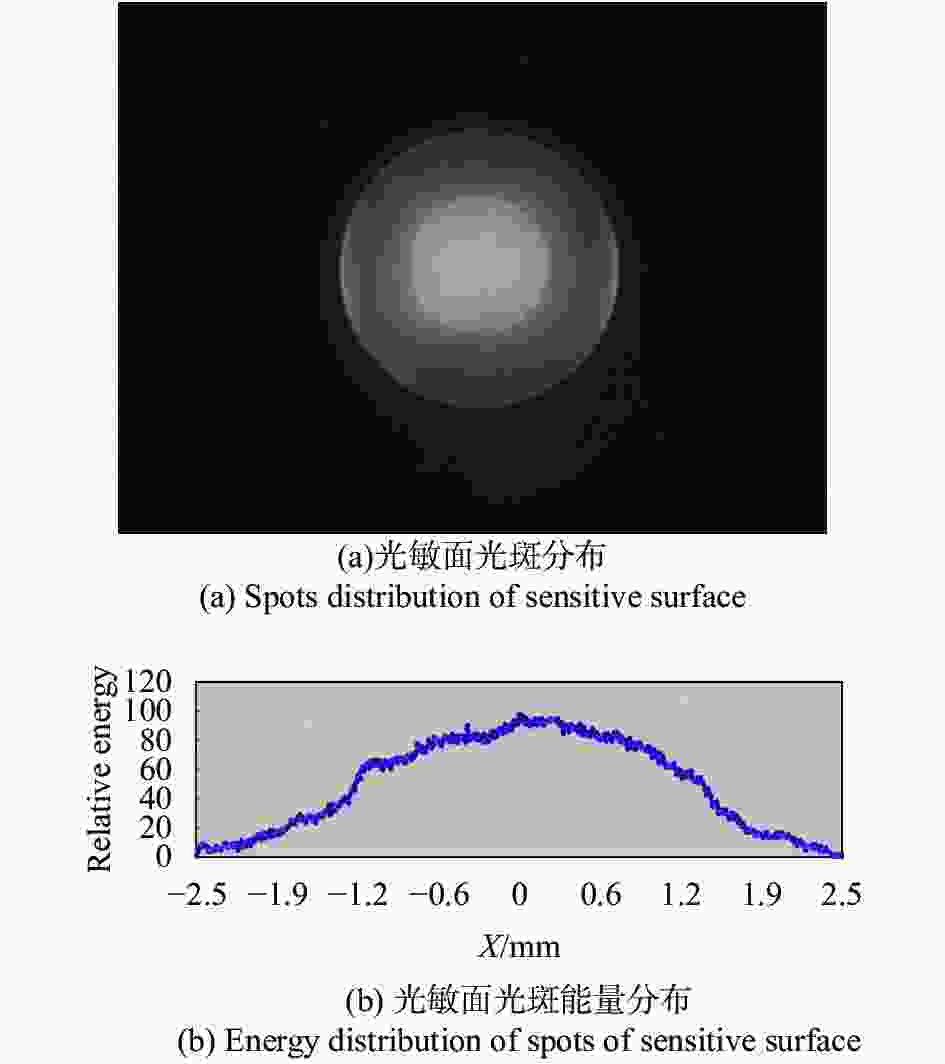
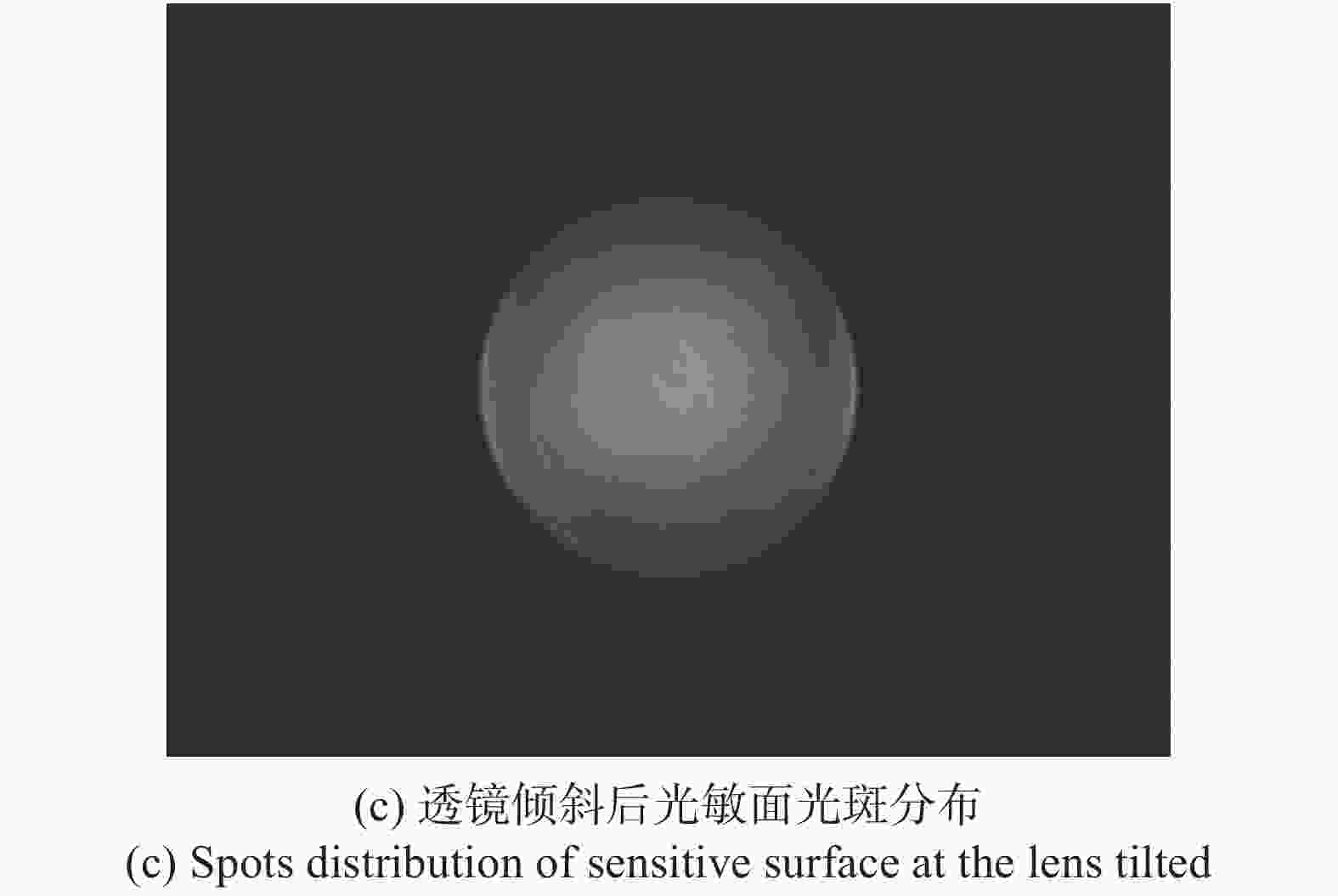
图 10 采集得到光斑及能量分布
Figure 10. Collecting the spot and energy distribution
-
依据像差理论设计了激光半主动镜头,对影响光斑质量的关键因素进行了分析,并以此为基础;在实验室条件下,搭建了激光半主动光学系统可视化检测系统,实验结果表明:实测光斑形状、大小与理论分析光斑形状、大小状态基本一致;仿真分析得到的鬼像光斑与实测的鬼像光斑状态一致,且鬼像光斑的位置反映了透镜3、透镜4的倾斜量,依据此现象可以快速筛选镜头。该测试系统应用于批产类激光半主动制导镜头测试筛选中,大幅降低了激光类检测系统的成本,提高了半主动类光学系统的检测效率。
Design of laser semi-active optical system and visual testing
-
摘要: 激光制导是当今最常用的制导方式之一,激光半主动光学系统性能的优劣直接影响其制导精度。提出了一种激光半主动光学系统像差优化设计方法,通过赋予不同的球差与离焦量实现激光半主动光学系统初始结构设计,通过对非对称像差优化实现光斑均匀化设计,设计并研制了折射式激光半主动光学镜头,光学系统工作波段1064 nm,视场为±9.2°,光斑大小5 mm,能量分布均匀;为解决激光半主动镜头不能单独检测的问题,提出了利用色差特性实现镜头低成本可视化检测的原理,并搭建了激光半主动光学镜头的可视化检测系统。镜头的测试结果表明,光斑大小满足设计要求,低成本可视化检测系统大幅提高了镜头检测效率,并易于工程化,批量化生产。Abstract: Laser guidance is one of the most commonly used guidance methods nowadays, and the performance of laser semi-active optical system directly affects its guidance accuracy. The method for the aberration optimization design of laser semi-active optical system was discussed, the initial structure of the optical system was realized by giving different spherical aberration and defocus values, and the spot uniformity design was realized by controlling the asymmetric aberration. A refractive laser semi-active lens was designed and fabricated, in 1064 nm working wavelength, with ± 9.2° field of view, 5 mm spot size, uniform energy distribution. In order to solve the problem that laser semi-active lens can not be detected separately, the principle of a low-cost visual testing of lens was proposed, which based on the chromatic aberration characteristics, and the visual testing system for laser semi-active optical lens was built. Test results of the lens show that the spot size satisfies the design requirements, and the low-cost visual testing system significantly improves the efficiency of lens testing and is easy to engineering and mass-produce.
-
Key words:
- laser semi-active seeking guidance /
- optical design /
- visual testing /
- aberration
-
[1] Wang Kuangbiao. Latest development and trends of semiactive laser guidance technology [J]. Infrared and Laser Engineering, 2008, 37(S): 275-279. (in Chinese) [2] Zhang Tengfei, Zhang Hexin, Hui Junjun. A review on development and application of laser-guided weapons [J]. Electronics Optics & Control, 2015, 22(10): 62-67. (in Chinese) [3] Gao Siyuan, Liu Hui, Zhu Mingchao, et al. Analysis and optimization of angle measurement accuracy of strap-down laser semi-active guidance seeker [J]. Infrared and Laser Engineering, 2015, 44(7): 2169-2174. (in Chinese) doi: 10.3969/j.issn.1007-2276.2015.07.035 [4] Qian Kun, Li Ting, Li Junwei. Design of a semi-active laser/active radar/infrared common aperture compound optical system[C]//Proc of SPIE, 2018, 10832: 108321H. [5] Barth J, Fendt A, Florint R, et al. Dual mode seeker with imaging sensor and semi-active laser detector[C]//Proc of SPIE, 2007, 6542: 65423B. [6] Peng Jingjing, Chen Huixin, Huang Hongyun. Based on semiconductor laser diode a laser target simultor [J]. Guidance & Fuze, 2018, 39(1): 17-21. (in Chinese) [7] Yu Xiaojun, Zheng Zhiqiang, Liu Linhai. Air semi-active laser guided weapons hardware-in-the-loop simulation research [J]. Aviation Precision Manufacturing Technology, 2016, 52(6): 13-22. (in Chinese) doi: 10.3969/j.issn.1003-5451.2016.06.005 [8] Han Wenbo, Yang Xiaomao. Target acquisition and tracking system of infrared seeker [J]. Journal of Changchun University of Science and Technology (Natural Science Edition), 2016, 39(1): 36-41. (in Chinese) [9] (郁道银, 谈恒英. 工程光学. 北京: 机械工业出版社), 1999. Yu Daoyin, Tan Hengying. Engineering Optics[M]. Beijing: Mechanic Industry Press, 1999. (in Chinese) -

 点击查看大图
点击查看大图
图(11)
计量
- 文章访问数: 393
- HTML全文浏览量: 151
- PDF下载量: 65
- 被引次数: 0









