







-
随着空间光学遥感技术的发展,空间光学遥感相机为满足大视场、高分辨率的要求,焦平面的规模越来越大[1-3]。空间相机由于发射阶段的冲击和振动以及在轨工作时环境的变化,导致相机焦平面与像面不重合,产生离焦问题。对于分辨率高、精度要求高的相机,配备调焦机构是很有必要的[4-5]。
对于线阵推扫相机,焦平面线阵长度和质量成几何倍数增加。相比传统400 mm以内的短线阵焦平面,目前长线阵焦平面尺寸达到900 mm以上,焦面质量也由原来的20 kg以内上升到50 kg以上,同时调焦机构可利用的空间降低,因此传统的调焦系统在驱动力和空间方面都无法满足现有长跨度、大负载调焦机构的设计需求。
国外文献中关于调焦机构具体设计的内容很少,没有实质性内容。国内的调焦机构通常采用旋转电机和直线电机驱动两种方式,旋转电机是指由丝杠螺母或凸轮机构将电机的回转运动转换为直线运动,再通过一系列的减速机构实现精确调焦。凸轮机构的结构比较简单,抗冲击能力强,适宜用作重载机构的运动方向转换,但凸轮曲线的加工要求较高,且凸轮机构和其减速机构的空间要求也较大。丝杠螺母机构的结构简单,运动灵活,但是其驱动力矩不足,抗冲击能力差。直线电机是将电机输出的运动直接施加在滑动件上,不需中间的转换结构,传递效率高,缺点是成本高[6-7]。针对现有调焦系统的不足和长线阵焦面的特点,文中提出了一种适用于长跨度、大负载调焦机构。根据指标要求进行了详细设计,介绍了调焦机构工作原理,并对调焦精度及稳定性做了分析及试验验证。
-
空间相机常用的调焦方式大体分为反射镜调焦、焦面调焦和镜头调焦三种[8-10]。
反射镜调焦是在镜头后截距内增加反射镜改变光路方向,通过移动反射镜改变焦面位置,适用于后截距较长、调焦精度要求高的长焦距相机。如2005年日本的MTSAT-1R的遥感相机JAMI、2006年美国的HiRISE相机(图1)、美国的KA-112全景式航空相机等,反射镜调焦在国内遥感相机中也得到了大量应用。

图 1 HiRISE空间相机
Figure 1. HiRISE space camera
焦面调焦是通过移动遥感器焦面的位置进行调焦,适用于装机空间小、焦距比较短的遥感相机,如美国的KS-146相机(图2)、2011年法国 Pleiades卫星的遥感相机、美国SNAP的天文望远镜(Optical Telescope Assembly)等,此外国内遥感卫星系列、资源卫星的CCD相机等也采用了该调焦方式。

图 2 KS-146相机调焦机构
Figure 2. Focusing mechanism of KS-146 camera
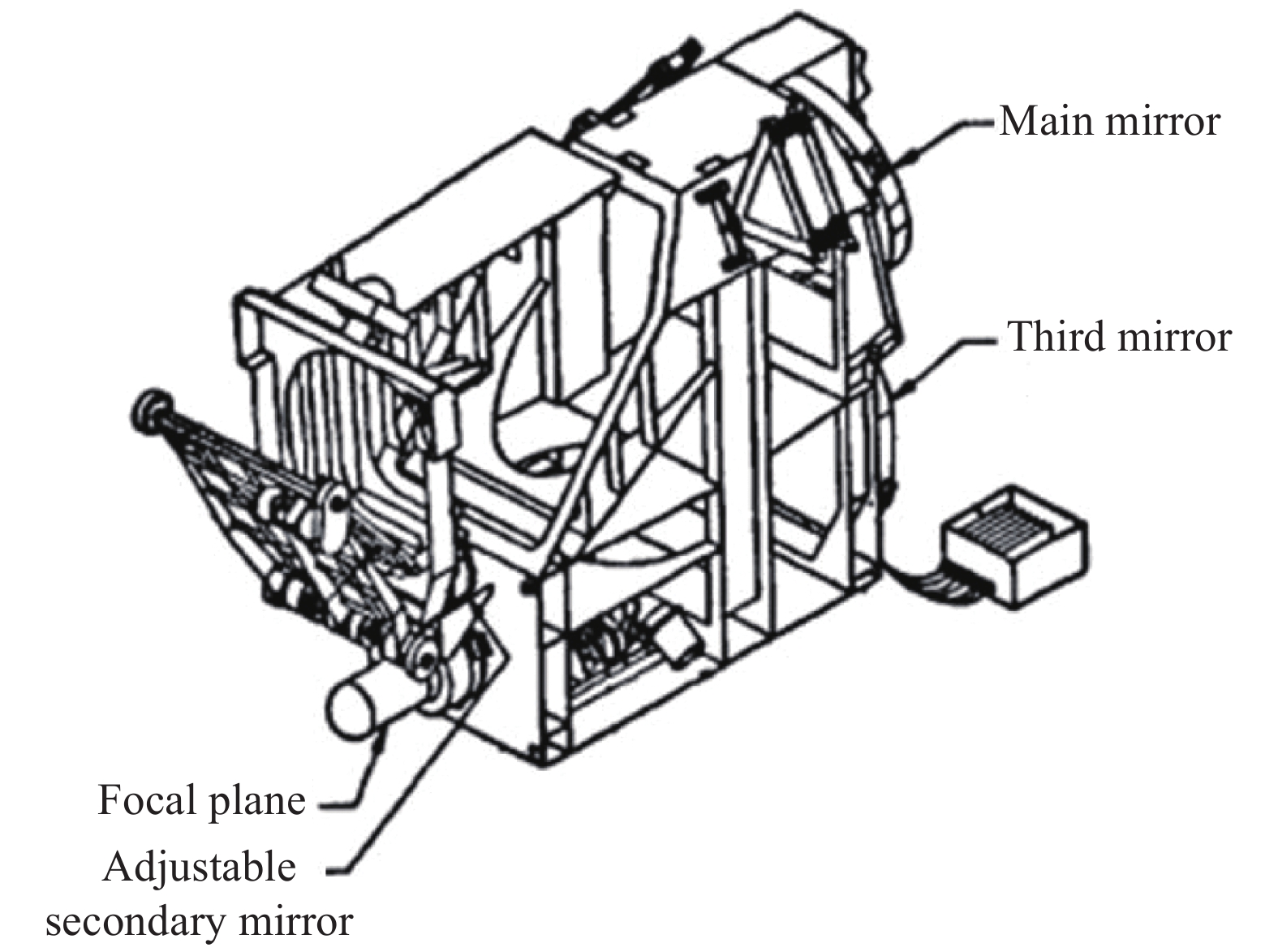
镜头调焦是通过移动光学镜头中的透镜改变焦距,适用于小型相机或望远镜头中,如美国三反离轴的多光谱成像望远镜(图3)采用次镜调焦的方式,而国内同轴相机多采用三镜调焦的方式。

图 3 多光谱成像望远镜
Figure 3. Multi-spectrum imaging telescope
-
文中设计的调焦机构用于支撑线阵长度900 mm、负载质量50 kg的焦面。结合某在研型号的指标要求分解到调焦机构的参数如下:
(1)调焦范围:不小于±3 mm;
(2)调焦步距:不超过1/10地相机镜头焦深(0.1 mm),即0.01 mm;
(3)调焦结构设计需满足焦面组件稳定性要求,调焦机构在调焦过程中需满足焦面角度偏转不超过10″;
(4)一阶频率不小于100 Hz。
-
该光学系统不涉及透镜组,如果选用反射镜调焦只能采取折镜调焦,反射镜尺寸大、质量重、支撑结构复杂,且位于光学系统最顶端,力学条件较差,为保证光学系统的稳定性,不适合采用反射镜调焦方式,故采用焦面调焦方式。
系统采用双路电机驱动的调焦方式,采用两套调焦系统分布在焦面两端,将水平直线运动转化为垂直方向直线运动,从而实现焦面调焦功能,解决了调焦驱动力矩不足、安装占用空间大等问题。相比于传统调焦机构,双电机驱动能够解决长线阵单点驱动刚度低的问题,使得刚度有明显提升,同时双电机克服了单电机驱动力低的问题,系统示意图如图4所示。

图 4 调焦系统组成示意图
Figure 4. Sketch map of focusing mechanism system composition
-
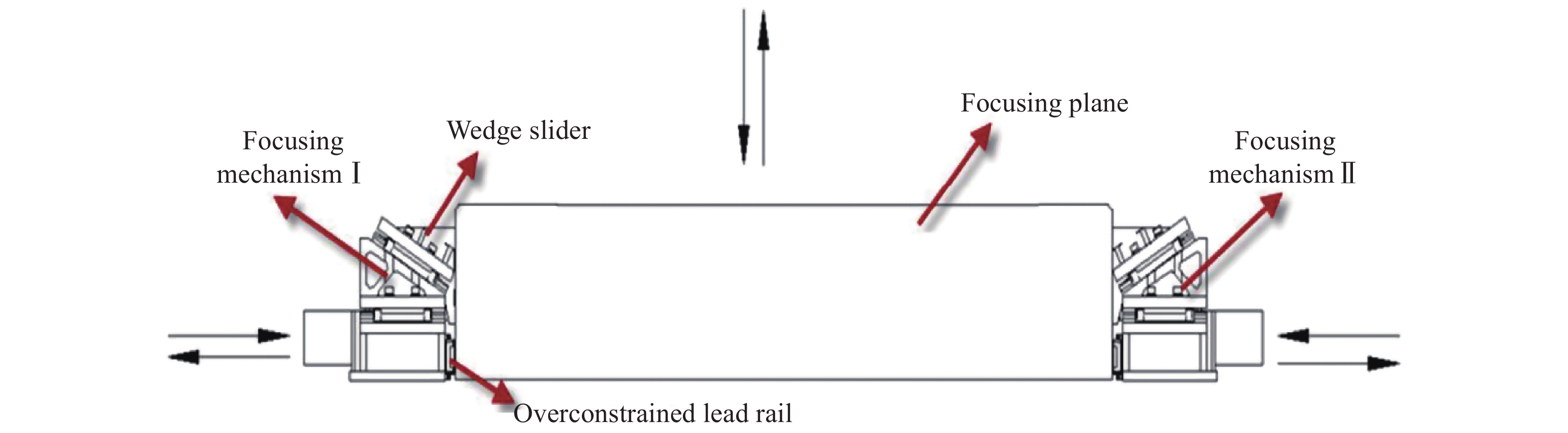
根据指标要求,结合空间需求及质量,采用双路电机驱动+闭环控制的一种焦面调焦系统方案,如图5所示。该调焦机构采用双路调焦机构驱动以提供大的驱动力矩,每路调焦机构为步进电机与滚珠丝杠副的结构形式,中间采用齿轮副作为减速机构,每路调焦机构各驱动一个楔形滑块实现焦面的移动,以达到调焦目的;为了承受发射阶段的振动和冲击,采用两组过约束导轨保证整个调焦机构组件的力学性能。

图 5 调焦机构示意图
Figure 5. Schematic diagram of focusing mechanism
具体实现形式为:电机转动通过减速齿轮组转化为滚珠丝杠副带动楔形滑块水平直线运动,两个楔形滑块同时水平运动转化为焦面的垂直运动,每个楔形滑块共安装两组直线导轨以保证前后移动时的直线度,两组过约束导轨既能保证焦面上下运动的直线性,又能提高整体的刚度,保证力学性能。
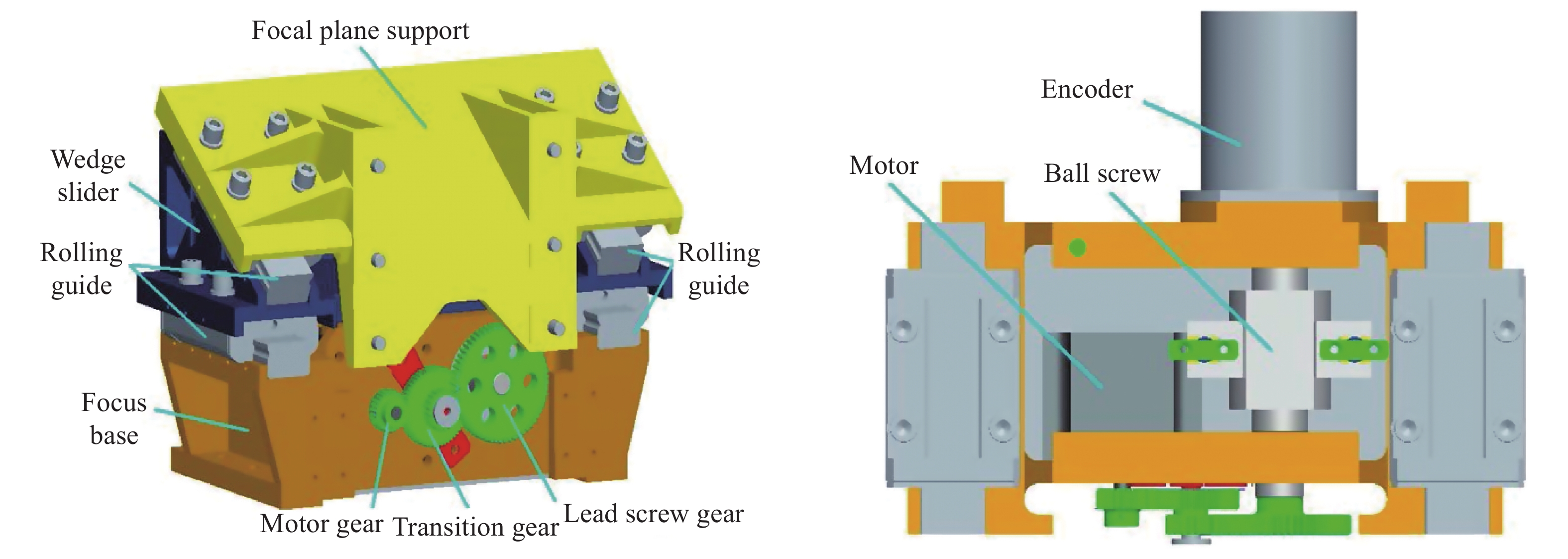
每组调焦机构主要包含调焦基座、楔形滑块、焦面支架、电机、滚珠丝杠副、编码器、直线导轨以及减速齿轮[11],如图6所示。

图 6 调焦机构组成图
Figure 6. Sketch map of focusing mechanism
该方案的优点是驱动能力大,能在地面装调阶段推动大负载焦面,保证发射段可靠的锁紧力矩。通过导轨的约束保证了焦面运动的精度及结构的整体力学性能;通过闭环控制保证两个电机驱动同步性,避免两套机构运动时不同步,保证焦面组件的稳定性。
-
为了满足0.01 mm调焦步距及两套调焦机构的同步性,首先要实现单套调焦机构的高精度,单套调焦机构需通过步进电机经过减速齿轮组和滚珠丝杠副,并配合高精度的编码器才能实现,这就对元器件的选用提出了高要求。
步进电机具有精度高、可靠性高、无累计误差等特点,因此采用步进电机驱动。根据负载50 kg以及发射阶段锁紧力矩的要求,选用较为成熟的最大静转矩不小于588 mN·m、步距角为1.8°的步进电机。在振动试验及发射条件下,焦面要承受15000 N,经过换算作用于单套丝杠的螺母上9000 N,使丝杠产生的转矩为:
$$\begin{split} \\ T = \frac{{{F_a}{P_h}}}{{2\pi \eta }} \end{split}$$ (1) 式中:T为螺纹力,N·mm;Fa为轴向载荷,N;Ph为导程,mm;η为传动效率,取0.9。可得T=3183.1 N·mm。
考虑到电机在发射主动段为单相加电自锁,电机的最大静转矩为600 N· mm。由此可计算出减速机构减速比u=T1/T2=5.3,故齿轮减速比u选用6。
双电机调焦机构的同步性精度需要具有较高的位置测量精度,根据分析,角度测量传感器的角分辨率应小于调焦机构步进角的1/3。选用电机步距角为1.8°,因此角度测量分辨率应不大于0.6°。通常高精度角度测量元件主要有电位计、编码器等,电位计由于在测量中存在盲区,无法实现一周以上的角度测量,因此选用分辨率为12位的编码器。
直线导轨、滚珠丝杠副均采用高精度等级的型号,结构部件的加工精度也采用精密级来保证两套调焦机构的一致性。
-
为了防止在轨复杂温度环境下的冷焊现象,调焦机构中的活动部件考虑了防冷焊的要求,角接触球轴承、导轨、滚珠丝杠滚珠以及齿轮等活动部件表面均涂覆二硫化钼的固体润滑层。防冷焊主要技术指标如表1所示。
表 1 MoS2要求
Table 1. Requirement of MoS2
Test project Technical index Friction conefficient μ≤0.10 Friction durability τ≥3×105 Adhesion/mN Lc≥60 Thickness/μm 1±0.5 -
影响调焦精度的主要因素是:步进电机的步距精度、步距累积误差、滚珠丝杠的运动精度,减速机构的间隙(齿轮间隙)[12-14]。由于导轨间隙控制的很小,对调焦精度影响可以忽略不计。
根据传递路径,双侧电机分别通过传动比为6的齿轮减速机构传递给导程为2 mm的滚珠丝杠,并经过30°的楔形角将水平运动转化为焦面的直线运动,可以计算电机每走一步焦面移动的距离为:
$${{L}} = \frac{{\alpha {P_h}}}{{360^\circ \times {{A}}}} \times \tan 30^\circ = 0.000\;98\;{\rm{mm}}$$ (2) 式中:α为电机的步距角,α=1.8°;Ph为滚珠丝杠副的导程,Ph=2 mm;A 为啮合齿轮的减速比,A=6;30°为楔形滑块的斜面与地面夹角。
根据滚珠丝杠的研制要求,滚珠丝杠的运动精度为0.004 mm,转化到焦面移动方向的精度为:δ1=0.0023 mm。
齿轮间隙主要包含齿轮侧隙(即反转空回)和齿距偏差,根据齿轮加工要求,齿轮间隙转化到焦面移动方向的精度为:δ2=0.03 μm。
由以上精度可知,调焦机构的精度为:
$\sqrt {{{{L}}^2} + {{\rm{\delta }}_{\rm{1}}}^2 + {{\rm{\delta }}_{\rm{2}}}^2} =$ 0.003 mm,满足小于1/10地相机镜头焦深(0.1 mm)的要求。 -
调焦稳定性精度取决于双路调焦机构的同步性,根据编码器精度可以计算出双路调焦机构的移动误差,同步误差示意图如图7所示。

图 7 调焦机构同步误差分析示意图
Figure 7. Sketch map of focusing mechanism synchronous error analysis
编码器分辨率为12位,其测量误差为:
$\Delta_{1}=\dfrac{360^{\circ}}{2^{12}}= $ $ 0.09^{\circ}$ 。根据调焦精度计算可知,焦面结构两端最大移动误差为:
(1)假设一端电机运动的0.09°全部带来焦面垂直运动情况
根据图7中几何尺寸可知,当焦面结构两端存在Δ2误差时,造成焦面偏转角度Δ3为:
$$ {\Delta _3} = \arctan \frac{{{\Delta _2}}}{{900}} = 0.000\;003\;3^\circ = 0.01^{''} $$ (2)假设一端电机运动的0.09°全部带来焦面水平运动情况
$\Delta_{4}=\dfrac{0.09^{\circ}}{1.8^{\circ}} \times 0.001\;7=0.000\;085$ (其中0.0017为电机运动0.09°引起的直线运动量)。当焦面水平运动时不会对焦面造成偏转,仅对像元位置产生影响,根据移动量计算移动的像元数即可。
由上述计算可知:调焦稳定性精度满足小于10″的精度要求。
-
调焦机构须能够承受卫星发射过程中的冲击和振动,以保证相机入轨后能正常工作。所以在调焦机构设计时,须对调焦机构的刚度进行分析与验证。文中采用Hypermesh对调焦机构建立有限元模型,整个模型全部采用10节点四面体tet10单元,螺钉连接处采用MPC(RB2)粘接,导轨连接处采用MPC与弹簧单元相结合,通过MPC(RB3)分别将导轨安装面的六个自由度约束,导轨滑块与架构之间的MPC通过弹簧单元连接,将弹簧单元沿滑动方向的刚度设置为0,其余方向设置为无穷大,这样更接近真实情况,其有限元模型如图8所示。

图 8 调焦机构有限元模型
Figure 8. FEM of focusing mechanism
对调焦组件进行了约束模态分析,前三阶模态情况如表2所示。
表 2 前三阶模态分析
Table 2. Analysis of first three order mode
Order Vibration form Frequency/Hz First 
110 Second 
148 Third 
260 -
为了验证技术的可行性,根据前期的调焦机构设计方案,在调焦机构装配完成后对其原理和精度进行验证试验[15-17]。主要包括力学试验、调焦精度和直线性测试。
-
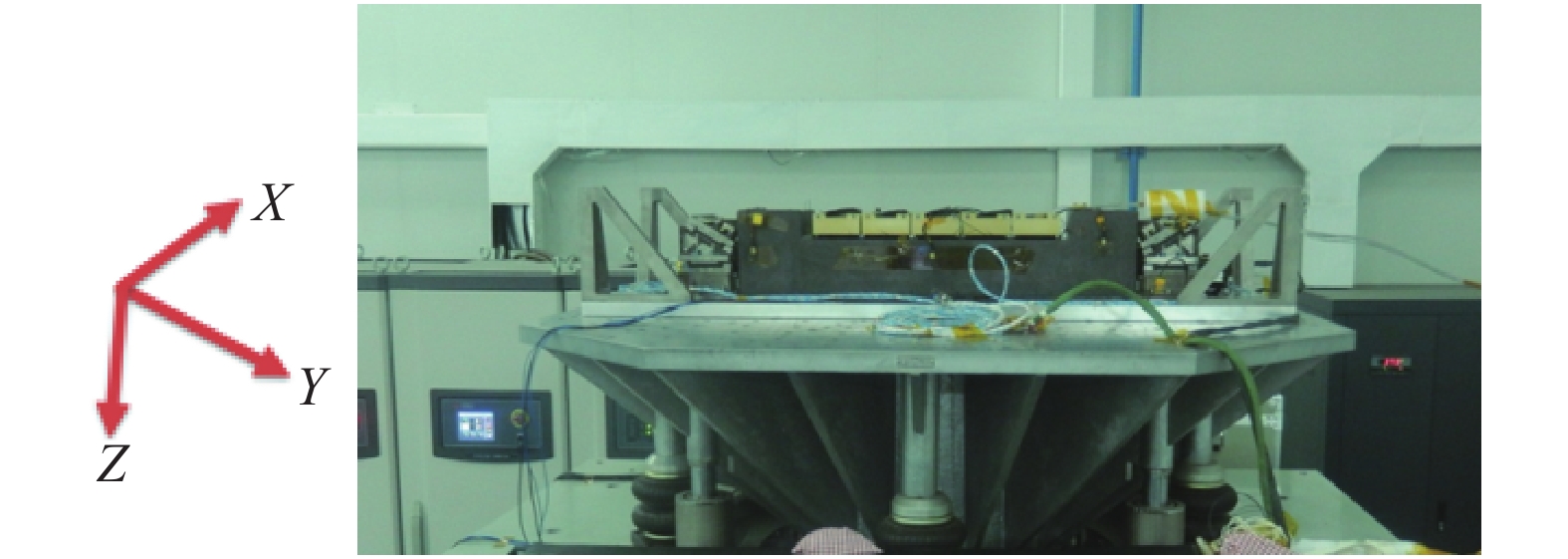
如图9所示,力学试验包括三个方向的正弦和随机振动试验,其中Y向为丝杠轴向,X为水平方向,Z向按照右手定则确定,由表3可知,调焦机构的一阶频率为X向的105 Hz,与仿真结果非常接近,满足大于100 Hz的要求。根据多次试验数据取平均数,由结果(表4~表5)可知:正弦振动时,三个方向的基频均高于100 Hz,其最大响应放大倍数均发生在100 Hz处;随机振动时,各关键部位的均方根加速度放大倍数均不超过4倍。根据试验结果,该调焦机构具有较高的力学刚度和较小的力学响应放大,可以降低力学环境对机构的破坏性。

图 9 调焦组件振动试验
Figure 9. Vibration test of focusing device
表 3 调焦组件的三向一阶特征频率
Table 3. Three directions first order characteristic frequency of focusing device
Direction X/Hz Y/Hz Z/Hz Characteristic frequency 105 197 108 表 4 正弦试验结果
Table 4. Results of sine vibration
Direction X Y Z Input acceleration/g 2 2 2.5 Output acceleration/g 4.81 10.62 14.75 Amplified factor 2.4 5.3 5.9 表 5 随机试验结果
Table 5. Results of random vibration
Direction X Y Z Input acceleration/g 2.88 2.88 2.88 Output acceleration/g 11 7.1 7.1 Amplified factor 3.8 2.5 2.5 -
振动试验前后对调焦精度及电机锁定情况进行了测试。
调焦电机在振动前加电锁定,在振动后解锁,调焦机构的编码器振动前后读数没有变化。在随机振动过程中,编码器的读数有1位的跳变,对应焦面变化量的0.3 μm。振动前后,读数发生跳变的原因是导轨,滚珠丝杠以及齿轮均有装配间隙,振动过程均会有微小弹性变形。
在焦面组件上粘立方棱镜,通过经纬仪检测焦面在全量程范围内直线运动的偏角;在焦面组件两侧各粘贴一个平面反射镜,通过双拼干涉仪可以检测两端调焦机构转化为焦面组件不同步距下的位移量。通过对振动试验前后的调焦精度的数据对比得出以下结论:在±3 mm行程调焦范围内,回程误差最大为0.006 mm,调焦精度为3.8 μm,两套机构同步性精度为1.1 μm,调焦机构在与滑动方向垂直的两个方向的偏角变化在5"以内,振动前后调焦精度基本保持不变。
根据指标要求,调焦步距需不超过1/10地相机镜头焦深(0.1 mm),即0.01 mm,调焦精度为3.8 μm,满足小于0.01 mm的要求,因此调焦机构的调焦精度满足对相机成像系统的调焦要求。
-
调焦机构采用双路电机驱动、闭环控制的方案,通过分析和试验结果表明,该调焦机构的一阶模态为105 Hz,满足大于100 Hz的要求,随机放大倍数均小于4倍,说明具有良好的动力学性能。振动试验前后测试了调焦精度和导向精度,调焦精度为3.8 μm,导向精度小于5″,说明具有较高的精度和稳定性。综上所述,该结构具有结构紧凑、运行平稳、可靠性高、位移精度高等特点,为后续长线阵大负载焦平面调焦机构提供了一种设计思路。
Design of focusing mechanism for long array focal plane with heavy load
-
摘要: 空间相机运载过程的冲击振动及在轨复杂力热环境的影响容易导致相机焦平面与像面的不重合,产生离焦问题。针对长线阵大负载焦平面离焦问题,设计了一种调焦机构。该机构采用两套机构驱动,可以提供大的驱动力矩,并采用两组过约束导轨保证其力学性能。每套驱动机构由步进电机、滚珠丝杠、编码器、滚动导轨和齿轮系组成。对调焦机构建立了有限元仿真分析模型,通过模态分析,验证了该结构具有较好的刚性,能够满足相应的力学条件要求。后续通过力学试验后的精度测试对调焦精度、稳定性精度分析表明:该调焦机构的调焦精度为3.8 μm,稳定性小于5″, 同步精度为1.1 μm。设计及试验证明,该调焦机构具有较高的调焦精度和可靠性,可以满足一定范围内长线阵焦面精密调焦需要。Abstract: The focal plane of a space camera will defocus under the launching vibration and shock and complex environmental conditions in space which are changeable. In order to compensate defocusing for focusing mechanism that is long array focal plane with heavy load, a focusing mechanism was designed. This focusing mechanism was driven by two sets of motion mechanism that could provide large driving torque. The two overconstrained lead rails could meet the need of mechanical property. Every mechanism contained a stepper motor, a screw, a encoder, a rolling guide and gear transmission. The finite-element emulation analysis method was used to establish simulation model of focusing mechanism. Through the modal analysis, it verified that this mechanism had a better rigidity and could meet dynamic requirement. Analysis of focusing precision and stability accuracy indicate that the focusing precision of focusing mechanism is 3.8 μm, the stability is less than 5″ and the synchronization precision is 1.1 μm. The design analysis and experimental results show that the focusing mechanism has high focusing precision and high reliability, which can make use of precision adjustment of long focal plane.
-
Key words:
- space camera /
- focusing mechanism /
- long focal plane /
- overconstrained lead rail
-
图 7 调焦机构同步误差分析示意图
Figure 7. Sketch map of focusing mechanism synchronous error analysis
表 1 MoS2要求
Table 1. Requirement of MoS2
Test project Technical index Friction conefficient μ≤0.10 Friction durability τ≥3×105 Adhesion/mN Lc≥60 Thickness/μm 1±0.5  下载: 导出CSV
下载: 导出CSV
表 2 前三阶模态分析
Table 2. Analysis of first three order mode
Order Vibration form Frequency/Hz First 110 Second 148 Third 260
下载: 导出CSV
表 3 调焦组件的三向一阶特征频率
Table 3. Three directions first order characteristic frequency of focusing device
Direction X/Hz Y/Hz Z/Hz Characteristic frequency 105 197 108
下载: 导出CSV
表 4 正弦试验结果
Table 4. Results of sine vibration
Direction X Y Z Input acceleration/g 2 2 2.5 Output acceleration/g 4.81 10.62 14.75 Amplified factor 2.4 5.3 5.9
下载: 导出CSV
表 5 随机试验结果
Table 5. Results of random vibration
Direction X Y Z Input acceleration/g 2.88 2.88 2.88 Output acceleration/g 11 7.1 7.1 Amplified factor 3.8 2.5 2.5
下载: 导出CSV
-
[1] Zhang Xinjie, Wang Shuqing, Yan Changxiang. Design and analysis for focusing mechanism of space camera [J]. Chinese Journal of Optics and Applied Optics, 2010, 3(5): 462-466. (in Chinese) [2] Pu Qianshuai, Zhai Yan, Wen Dahua, et al. Design and analysis of focusing mechanism for spaceborne infrared detector [J]. Journal of Changchun University of Science and Technology, 2015(2): 25-28. (in Chinese) [3] Fan Hongjie, Dong Jihong, Li Wei, et al. Design and analysis of focusing mechanism for space camera [J]. Journal of Changchun University of Science and Technology, 2016, 39(3): 1-4. (in Chinese) [4] Wang Zhongshan, He Xin, Cui Yongpeng, et al. Analysis and validation of large size focal-plane focusing device for space camera [J]. Infrared and Laser Engineering, 2014, 43(4): 1206-1209. (in Chinese) doi: 10.3969/j.issn.1007-2276.2014.04.033 [5] Du Yimin, Jia Xuezhi, An Yuan, et al. Design and analysis of focusing mechanism for a high resolution space camera [J]. Infrared Technology, 2019, 41(4): 305-310. (in Chinese) [6] Cui Yongpeng, He Xin, Wang Zhongshan. Focusing mechanism of big dimension focal plane [J]. Opto-Electronic Engineering, 2015(6): 57-61. (in Chinese) [7] Liu Lei, Cao Guohua. Double cam focusing mechanism of space camera with wide field and long-focal-plane [J]. Optics and Precision Engineering, 2012, 20(9): 1939-1944. (in Chinese) [8] Yang Yongbin. Study on focusing technique for space optical camera [J]. Spacecraft Engineering, 2011, 20(2): 20-24. (in Chinese) [9] Jia Xuezhi, Zhang Lei, An Yuan, et al. Design and experiment research on precision focusing mechanism of space remote sensor [J]. Journal of Mechanical Engineering, 2016, 52(13): 25-30. (in Chinese) doi: 10.3901/JME.2016.13.025 [10] Guo Guanqun, Yan Changxiang, Tian Haiying. Design and finite element analysis of focusing mechanism for space remote sensor [J]. Journal of Changchun University of Science and Technology, 2018, 41(3): 30-33. (in Chinese) [11] Guo Quanfeng, Dong Jihong, Li Wei, et al. Focusing mechanism design for long focal length space camera [J]. OME Information, 2010, 27(11): 47-52. (in Chinese) [12] Chen Hongda, Chen Yonghe, Shi Tingting, et al. Error analysis for focusing mechanism of space camera [J]. Optics and Precision Engineering, 2013, 21(5): 1349-1356. (in Chinese) doi: 10.3788/OPE.20132105.1349 [13] Liu Bingqiang, Zhang Fan, Li Jinglin, et al. Analysis of synchronous motion error for focusing mechanism of space camera [J]. Chinese Optics, 2013, 6(6): 946-951. (in Chinese) [14] Wang Shuxin, Li Jinglin, Liu Lei, et al. Accuracy analysis of focusing mechanism in space camera with long-focal-plane [J]. Optics and Precision Engineering, 2010, 18(10): 2239-2243. (in Chinese) [15] Wang Kai, Yan Yong, Xu Minglin, et al. Design and experiment of precision focusing mechanism of space remote sensing camera with lightweight and miniaturization [J]. Infrared and Laser Engineering, 2018, 47(12): 1218004. (in Chinese) [16] Huang Houtian, Wang Dejiang, Shen Honghai, et al. Analysis and prospect of auto-focusing technique for the aerial camera [J]. Chinese Optics, 2014, 7(4): 542-551. (in Chinese) [17] 陈世平. 空间光学遥感器设计与试验[M]. 北京: 中国宇航出版社, 2003. Chen Shiping. Design and Experiment of Spacecamera[M]. Beijing: China Astronautic Publishing House, 2003. (in Chinese) -

 点击查看大图
点击查看大图

计量
- 文章访问数: 329
- HTML全文浏览量: 108
- PDF下载量: 55
- 被引次数: 0








