






-
机载光电系统是指搭载在飞行器上的红外相机、摄像头和瞄准器等光电设备,通过控制光电设备转动保持视轴对准目标方位,进而完成航拍、测绘和定检巡逻等工作的系统[1-3]。由于光电设备是以飞行器为平台来工作的,那么飞行器的运动姿态必然会影响光电设备的稳定,并且飞行器会持续振动而干扰光电设备的对准精度[4-5]。另外,大气中的不稳定气流也会使光电设备的视轴偏离目标方位,导致任务效率不高[6-7]。
为了解决这些问题,学者们开展了深入的研究,丛敬文等人[8]为了提高机载光电系统在干扰影响下的对准精度,在PI控制中引入干扰观测器,实现了对机载光电系统的鲁棒控制,但是该控制方法的响应速度较慢;陈丹琪等人[9]针对机载光电平台的目标定位,设计了基于最小二乘与高斯牛顿的混合非线性算法,在一定程度上提高了机载光电系统的控制精度,但是没有考虑机体振动和气流扰动的影响;王诚等人[10]针对机载光电探测系统提出了一种基于快反镜的二级稳定控制方法,通过提高工作带宽来抑制扰动影响,能够确保机载光电探测系统的视轴稳定,但是该方法不能准确估计干扰大小;吴卓昆等人[11]针对机载光电系统的跟瞄稳定问题,通过设计二阶低通滤波器来抑制干扰,并设计超前控制环节来补偿信号延迟,实现了对机载光电系统的稳定控制,但是控制精度不高。基于以上分析,文中针对三轴机载光电系统提出了一种模糊滑模鲁棒控制方法,并引入模糊算法来准确估计干扰,最终实现了对机载光电系统的高精度控制。
-
三轴机载光电系统[12]的结构如图1所示。其中,阴影部分表示机载光电设备,经X轴固定安装在内框上,内框经Y轴固定安装在外框上,外框经Z轴固定安装机体上。

图 1 三轴机载光电系统结构
Figure 1. Structure of three-axis airborne optoelectronic system
在转轴电机的作用下,光电设备可以绕X轴自由转动,因此,X轴又称为俯仰轴;内框可以带动光电设备绕Y轴自由转动,Y轴为飞行器的飞行方向,因此,Y轴又称为滚转轴;外框可以带动内框和光电设备绕Z轴自由转动,因此,Z轴又称为航向轴。机载光电系统的两框三轴结构可以确保光电设备能够对准任意目标方位,利用坐标转换关系可以得到三轴机载光电系统的数学模型为:
$$ {\boldsymbol{G\ddot \omega }} + {\boldsymbol{C\dot \omega }} = {\boldsymbol{T}} $$ (1) 式中:
$ {\boldsymbol{\omega }} = {\left[ {\begin{array}{*{20}{c}}\theta &\phi &\psi \end{array}} \right]^{\text{T}}} $ 分别表示机载光电设备相对于地面惯性坐标系的俯仰角、滚转角和航向角;$ {\boldsymbol{T}} = {\left[ {\begin{array}{*{20}{c}}{{T_X}}&{{T_Y}}&{{T_Z}} \end{array}} \right]^{\text{T}}} $ 分别表示俯仰电机、滚转电机和航向电机的驱动力矩;${\boldsymbol{G}}$ 和${\boldsymbol{C}}$ 为三轴机载光电系统的系数矩阵,具体表达式为:$$ \left\{ \begin{array}{l} {\boldsymbol{G}} = \left[ {\begin{array}{*{20}{l}} {{g_1}}&0&0 \\ 0&{{g_2}}&{{g_3}} \\ {{g_4}}&{{g_5}}&{{g_6}} \end{array}} \right] \\ {g_1} = {J_{Eyy}} \\ {g_2} = {J_{Rxx}}\cos {\theta _E} \\ {g_3} = {J_{Rxx}}\sin {\theta _E} \\ {g_4} = {J_{A{\textit{z}}{\textit{z}}}}\sin {\theta _R} \\ {g_5} = - {J_{A{\textit{z}}{\textit{z}}}}\sin {\theta _E}\cos {\theta _R} \\ {g_6} = {J_{A{\textit{z}}{\textit{z}}}}\cos {\theta _E}\cos {\theta _R} \\ \end{array} \right. $$ (2) $$ \left\{ \begin{array}{l} {\boldsymbol{C}} = \left[ {\begin{array}{*{20}{l}} {{c_1}}&0&0 \\ 0&{{c_2}}&{{c_3}} \\ {{c_4}}&{{c_5}}&{{c_6}} \end{array}} \right] \\ {c_1} = {K_f} \\ {c_2} = {{\dot \theta }_E}\sin {\theta _E}\left( {{J_{R{\textit{z}}{\textit{z}}}} - {J_{Ryy}} - 1} \right) + {K_f}\cos {\theta _E} \\ {c_3} = {J_{Rxx}}{{\dot \theta }_E}\cos {\theta _E} - {{\dot \theta }_E}\cos {\theta _E}\left( {{J_{R{\textit{z}}{\textit{z}}}} - {J_{Ryy}}} \right) + {K_f}\sin {\theta _E} \\ {c_4} = {{\dot \theta }_R}\cos {\theta _R}\left( {{J_{A{\textit{z}}{\textit{z}}}} - 1} \right) + {K_f}\sin {\theta _R} \\ {c_5} = \left( {1 - {J_{A{\textit{z}}{\textit{z}}}}} \right){{\dot \theta }_E}\cos {\theta _E}\cos {\theta _R} + \left( {{J_{A{\textit{z}}{\textit{z}}}} - 1} \right){{\dot \theta }_R}\sin {\theta _E}\sin {\theta _R} -\\ {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {K_f}\sin {\theta _E}\cos {\theta _R} \\ {c_6} = \left( {1 - {J_{A{\textit{z}}{\textit{z}}}}} \right){{\dot \theta }_R}\cos {\theta _E}\sin {\theta _R} - \left( {{J_{A{\textit{z}}{\textit{z}}}} + 1} \right){{\dot \theta }_E}\sin {\theta _E}\cos {\theta _R} +\\ {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {K_f}\cos {\theta _E}\cos {\theta _R} \\[-6pt] \end{array} \right. $$ (3) 式中:
${J_{Axx}}$ 、${J_{Ayy}}$ 和${J_{A{\textit{z}}{\textit{z}}}}$ 为机载光电系统整体的三轴转动惯量;${J_{Rxx}}$ 、${J_{Ryy}}$ 和${J_{R{\textit{z}}{\textit{z}}}}$ 为内框及光电设备的三轴转动惯量;${J_{Exx}}$ 、${J_{Eyy}}$ 和${J_{E{\textit{z}}{\textit{z}}}}$ 为光电设备的三轴转动惯量;${\theta _R}$ 表示外框相对于航向轴转动的角度;${\theta _E}$ 表示内框相对于滚转轴转动的角度;${K_f}$ 表示驱动电机的摩擦系数。由于机载光电系统容易受到飞行器机体振动以及气流扰动的影响,这会严重影响光电设备对准目标方位,因此必须充分考虑机体振动和气流扰动等干扰,才能实现对机载光电系统的精确控制,确保光电设备的准确定位,考虑干扰的三轴机载光电系统的数学模型为:
$$ {\boldsymbol{G\ddot \omega }} + {\boldsymbol{C\dot \omega }} = {\boldsymbol{T}} + {{\boldsymbol{T}}_d} $$ (4) 式中:
$ {{\boldsymbol{T}}_d} = {\left[ {\begin{array}{*{20}{c}}{{T_1}}&{{T_2}}&{{T_3}} \end{array}} \right]^{\text{T}}} $ 表示干扰矩阵。 -
首先针对三轴机载光电系统设计模糊滑模鲁棒控制方法,然后利用模糊算法估计出干扰大小,并进行稳定性分析,最终实现对三轴机载光电系统的精确控制。控制系统结构如图2所示。

图 2 控制系统结构
Figure 2. Control system structure
-
定义三轴机载光电系统的跟踪误差为:
$$ {\boldsymbol{e}} = {\boldsymbol{\omega }} - {{\boldsymbol{\omega }}_c} $$ (5) 式中:
$ {{\boldsymbol{\omega }}_c} = {\left[ {\begin{array}{*{20}{c}}{{\theta _c}}&{{\phi _c}}&{{\psi _c}} \end{array}} \right]^{\text{T}}} $ 表示期望的目标方位。进一步可以得到跟踪误差微分方程为:
$$ \left\{ \begin{gathered} {\boldsymbol{\dot e}} = {\boldsymbol{\dot \omega }} - {{{\boldsymbol{\dot \omega }}}_c} \\ {\boldsymbol{\ddot e}} = {\boldsymbol{\ddot \omega }} - {{{\boldsymbol{\ddot \omega }}}_c} \\ \end{gathered} \right. $$ (6) 积分滑模是通过合理设定积分器的初始状态,使系统的初始状态一开始就处于滑模面上,从而消除跟踪误差的一种非线性控制方法,能够有效提高传统滑模控制的鲁棒性和快速性。
设计如下积分终端滑模面:
$$ \left\{ \begin{array}{l} {\boldsymbol{\eta }} = {\boldsymbol{\dot e}} + {\boldsymbol{ce}} \\ {\boldsymbol{S}} = \displaystyle\int_0^t {{\boldsymbol{\eta }}{\rm d}t + {\boldsymbol{\eta }}{\rm{\rm{sgn}}} \left( {\boldsymbol{\eta }} \right) + {{\boldsymbol{\eta }}^{\frac{g}{h}}}{\rm{\rm{sgn}}} \left( {\boldsymbol{S}} \right)} \\ \end{array} \right. $$ (7) 式中:
${\boldsymbol{\eta }}$ 为传统滑模面;${\boldsymbol{S}}$ 为积分终端滑模面;${\boldsymbol{c}}$ 为正定矩阵;$1 < {g \mathord{\left/{\vphantom {g h}} \right.} h} < 2$ 。则可以得到积分终端滑模面微分方程为:$$ \begin{split} {\boldsymbol{\dot S}} =& {\boldsymbol{\eta }} + {\boldsymbol{\dot \eta }}{\rm{sgn}} \left( {\boldsymbol{\eta }} \right) + \frac{g}{h}{{\boldsymbol{\eta }}^{\frac{g}{h} - 1}}{\rm{sgn}} \left( {\boldsymbol{S}} \right) =\\ & {\boldsymbol{\dot e}} + {\boldsymbol{ce}} + \left( {{\boldsymbol{\ddot e}} + {\boldsymbol{c\dot e}}} \right){\rm{sgn}} \left( {\boldsymbol{\eta }} \right) + \frac{g}{h}{{\boldsymbol{\eta }}^{\frac{g}{h} - 1}}{\rm{sgn}} \left( {\boldsymbol{S}} \right) = \\ & {\boldsymbol{ce}} + \left[ {{\boldsymbol{c}}{\rm{sgn}} \left( {\boldsymbol{\eta }} \right) + 1} \right]{\boldsymbol{\dot e}} + {\rm{sgn}} \left( {\boldsymbol{\eta }} \right){\boldsymbol{\ddot e}} + \frac{g}{h}{{\boldsymbol{\eta }}^{\frac{g}{h} - 1}}{\rm{sgn}} \left( {\boldsymbol{S}} \right) \\ \end{split} $$ (8) 考虑如下Lyapunov函数
$V$ :$$ V = \frac{1}{2}{{\boldsymbol{S}}^{\text{T}}}{\boldsymbol{S}} $$ (9) 对公式(8)求导可以得到:
$$ \begin{split} \dot V = &{{\boldsymbol{S}}^{\text{T}}}{\boldsymbol{\dot S}}= {{\boldsymbol{S}}^{\text{T}}}\left( {{\boldsymbol{ce}} + \left( {{\boldsymbol{c}}{\rm{sgn}} \left( {\boldsymbol{\eta }} \right) + 1} \right){\boldsymbol{\dot e}} + } \right. {\rm{sgn}} \left( {\boldsymbol{\eta }} \right)\left( {{{\boldsymbol{G}}^{ - 1}}} \right.\left( {{\boldsymbol{T}} + } \right. \\& \left. {{{\boldsymbol{T}}_d} - {\boldsymbol{C\dot \omega }}} \right)\left. { - {{{\boldsymbol{\ddot \omega }}}_c}} \right)\left. { + \frac{g}{h}{{\boldsymbol{\eta }}^{\frac{g}{h} - 1}}{\rm{sgn}} \left( {\boldsymbol{S}} \right)} \right) \\ \end{split} $$ (10) 根据公式(10)设计三轴机载光电系统的积分终端滑模鲁棒控制律为:
$$ \begin{split} {\boldsymbol{T}} =& {\boldsymbol{C\dot \omega }} - {{\boldsymbol{T}}_d} + {\boldsymbol{G}}\left( {{{{\boldsymbol{\ddot \omega }}}_c} - \frac{g}{h}{{\boldsymbol{\eta }}^{\frac{g}{h} - 1}}{\rm{sgn}} \left( {\boldsymbol{S}} \right)} \right) + {\kern 1pt} {\kern 1pt} \\& {\rm{sgn}} \left( {\boldsymbol{\eta }} \right){\boldsymbol{G}}\left( { - {\boldsymbol{ce}} - \left( {{\boldsymbol{c}}{\rm{sgn}} \left( {\boldsymbol{\eta }} \right) + 1} \right){\boldsymbol{\dot e}} - {\boldsymbol{aS}}} \right) \\ \end{split} $$ (11) 式中:
$ {\boldsymbol{a}} $ 为正定矩阵。将公式(11)代入公式(10),化简可得:
$$ \dot V = - {{\boldsymbol{S}}^{\text{T}}}{\boldsymbol{aS}} \leqslant - {a_{\min }}{\left\| {\boldsymbol{S}} \right\|^2} \leqslant 0 $$ (12) 式中:
$ {a_{\min }} $ 是矩阵$ {\boldsymbol{a}} $ 的最小值。则由Lyapunov稳定性定理可以得到,积分终端滑模鲁棒控制律公式(11)可以确保三轴机载光电系统稳定跟踪目标方位。需要注意的是,终端滑模鲁棒控制律公式(11)是建立在干扰矩阵
$ {{\boldsymbol{T}}_d} $ 已知的前提下,但是通常情况下,$ {{\boldsymbol{T}}_d} $ 的准确值是难以获得的。接下来,利用模糊算法来估计干扰矩阵$ {{\boldsymbol{T}}_d} $ 。 -
模糊算法[13]是通过划定合理的模糊集合和论域范围,选用合适的隶属度函数进行模糊化,总结合理的模糊规则库并利用合理的模糊推理方法进行推理的的一种智能算法,具有速度快、精度高的优点,本节利用模糊算法来估计干扰矩阵
$ {{\boldsymbol{T}}_d} $ 。定义模糊算法的变量为:NB (负大)、NM (负中)、ZE (零)、PM (正中)、PB (正大),设计模糊规则如下:
(1) IF
$ {S_i} $ 为NB,THEN$ {\hat T_i} $ 为NB;(2) IF
$ {S_i} $ 为NM,THEN$ {\hat T_i} $ 为NM;(3) IF
$ {S_i} $ 为ZE,THEN$ {\hat T_i} $ 为ZE;(4) IF
$ {S_i} $ 为PM,THEN$ {\hat T_i} $ 为PM;(5) IF
$ {S_i} $ 为PB,THEN$ {\hat T_i} $ 为PB。设计模糊算法的隶属函数为:
$$ {\phi _i}\left( {{S_i}} \right) = \frac{{\displaystyle\prod\limits_{j = 1}^5 {\left[ {1 - S_i^2} \right]{{\rm e}^{1 - S_i^2}}} }}{{\displaystyle\sum\limits_{i = 1}^3 {\left[ {\prod\limits_{j = 1}^5 {\left[ {1 - S_i^2} \right]{{\rm e}^{1 - S_i^2}}} } \right]} }} $$ (13) 式中:
$ {\phi _j}\left( {{S_i}} \right) $ 表示第j个模糊规则的隶属函数。则可以得到干扰矩阵的估计值为:
$$ {{\boldsymbol{\hat T}}_d} = {\boldsymbol{\hat W}}{\boldsymbol{\phi}} \left( {\boldsymbol{S}} \right) $$ (14) 式中:
$ {\boldsymbol{\phi}} \left( {\boldsymbol{S}} \right) = {\left[ {\begin{array}{*{20}{c}}{{\phi _1}\left( {{S_1}} \right)}&{{\phi _2}\left( {{S_2}} \right)}&{{\phi _3}\left( {{S_3}} \right)} \end{array}} \right]^{\text{T}}} $ ;$ {\boldsymbol{\hat W}} $ 表示模糊算法权值$ {\boldsymbol{W}} $ 向量的估计值,自适应律设计如下:$$ \boldsymbol{\dot{\hat{W}}}=-{{\boldsymbol{G}}^{-1}}\text{sgn}\left( \boldsymbol{\eta\ } \right)\boldsymbol{S}-\text{ }\boldsymbol{b\tilde{W}}$$ (15) 式中:
$ {\boldsymbol{\tilde W}} $ 表示估计误差,$ {\boldsymbol{\tilde W}} = {\boldsymbol{\hat W}} - {\boldsymbol{W}} $ ;$ {\boldsymbol{b}} $ 为待设计的正定矩阵。在模糊算法的基础上,将三轴机载光电系统的积分终端滑模鲁棒控制律改进为:
$$ \begin{split} {\boldsymbol{T}} =& {\boldsymbol{C\dot \omega }} - {{{\boldsymbol{\hat T}}}_d} + {\boldsymbol{G}}\left( {{{{\boldsymbol{\ddot \omega }}}_c} - \frac{g}{h}{{\boldsymbol{\eta }}^{\frac{g}{h} - 1}}{\rm{sgn}} \left( {\boldsymbol{S}} \right)} \right) + {\kern 1pt} {\kern 1pt} \\& {\rm{sgn}} \left( {\boldsymbol{\eta }} \right){\boldsymbol{G}}\left( { - {\boldsymbol{ce}} - \left( {{\boldsymbol{c}}{\rm{sgn}} \left( {\boldsymbol{\eta }} \right) + 1} \right){\boldsymbol{\dot e}} - {\boldsymbol{aS}}} \right) \\ \end{split} $$ (16) -
定理1:文中所设计的积分终端滑模鲁棒控制律(16)能够确保三轴机载光电系统稳定跟踪目标方位。
证明:构建如下Lyapunov函数
$ W $ :$$ W = \frac{1}{2}{{\boldsymbol{S}}^{\text{T}}}{\boldsymbol{S}} + \frac{1}{2}{{\boldsymbol{\tilde W}}^{\text{T}}}{\boldsymbol{\tilde W}} $$ (17) 对公式(17)求导可得:
$$ \begin{split} \dot{W}=&{{\boldsymbol{S}}^{\text{T}}}\left( \boldsymbol{ce}+\left( \boldsymbol{c}\;{\rm{sgn}} \left( \boldsymbol{\eta } \right)+1 \right)\boldsymbol{\dot{e}}+ \right.{\rm{sgn}} \left( \boldsymbol{\eta } \right)\left( {{\boldsymbol{G}}^{-1}}\left( \boldsymbol{T}+ \right. \right. \\ & \left. {{\boldsymbol{T}}_{d}}-\boldsymbol{C\dot{\omega }} \right)-\left. {\boldsymbol{\ddot{\omega }}} \right)\left. +\frac{g}{h}{{\boldsymbol{\eta }}^{\frac{g}{h}-1}}\;{\rm{sgn}} \left( \boldsymbol{S} \right) \right)+{{{\boldsymbol{\tilde{W}}}}^{\rm T}}\boldsymbol{\dot{\tilde{W}}} \end{split}$$ (18) 将公式(8)、(14)、(15)代入公式(18)化简可得:
$$ \begin{split} \dot W =& - {{\boldsymbol{S}}^{\text{T}}}{\boldsymbol{aS}} - {{{\boldsymbol{\tilde W}}}^{\text{T}}}{\boldsymbol{b\tilde W}} \\ \leqslant & - {a_{\min }}{\left\| {\boldsymbol{S}} \right\|^2} - {b_{\min }}{\left\| {{\boldsymbol{\tilde W}}} \right\|^2} \\ \leqslant &0 \end{split} $$ (19) 式中:
$ {b_{\min }} $ 是矩阵$ {\boldsymbol{b}} $ 的最小值。由Lyapunov稳定性定理可得到定理1成立,即设计的积分终端滑模鲁棒控制律公式(16)能够确保三轴机载光电系统稳定跟踪目标方位。
-
为了验证提出的模糊滑模鲁棒控制方法的有效性和优越性,分别采用文中方法和参考文献[14]的分数阶控制方法进行对比仿真。整个仿真过程持续时长为20 s,三轴机载光电系统参数和控制参数如表1和表2所示。
表 1 三轴机载光电系统参数
Table 1. Three-axis airborne optoelectronic system parameters
Parameter Value Parameter Value JAxx 0.035 kg·m2 JAyy 0.038 kg·m2 JAzz 0.042 kg·m2 JRxx 0.028 kg·m2 JRyy 0.032 kg·m2 JRzz 0.036 kg·m2 JExx 0.021 kg·m2 JEyy 0.026 kg·m2 JEzz 0.032 kg·m2 Kf 0.00075 N·m·s2/(°) 表 2 控制参数
Table 2. Control parameters
Parameter Value Target orientation command ωc=[(2t+5cost)°, (8cost +e0.2t)°,
(10+2t+e0.2t)°]TInterference matrix Td=[0.2t+ e0.1t +2sint]3×1 N·m Parameter of fuzzy sliding mode robust control law g=5, h=3, a=diag{8,9,12},
b=diag{8,6,10}, c=diag{12,9,13} -
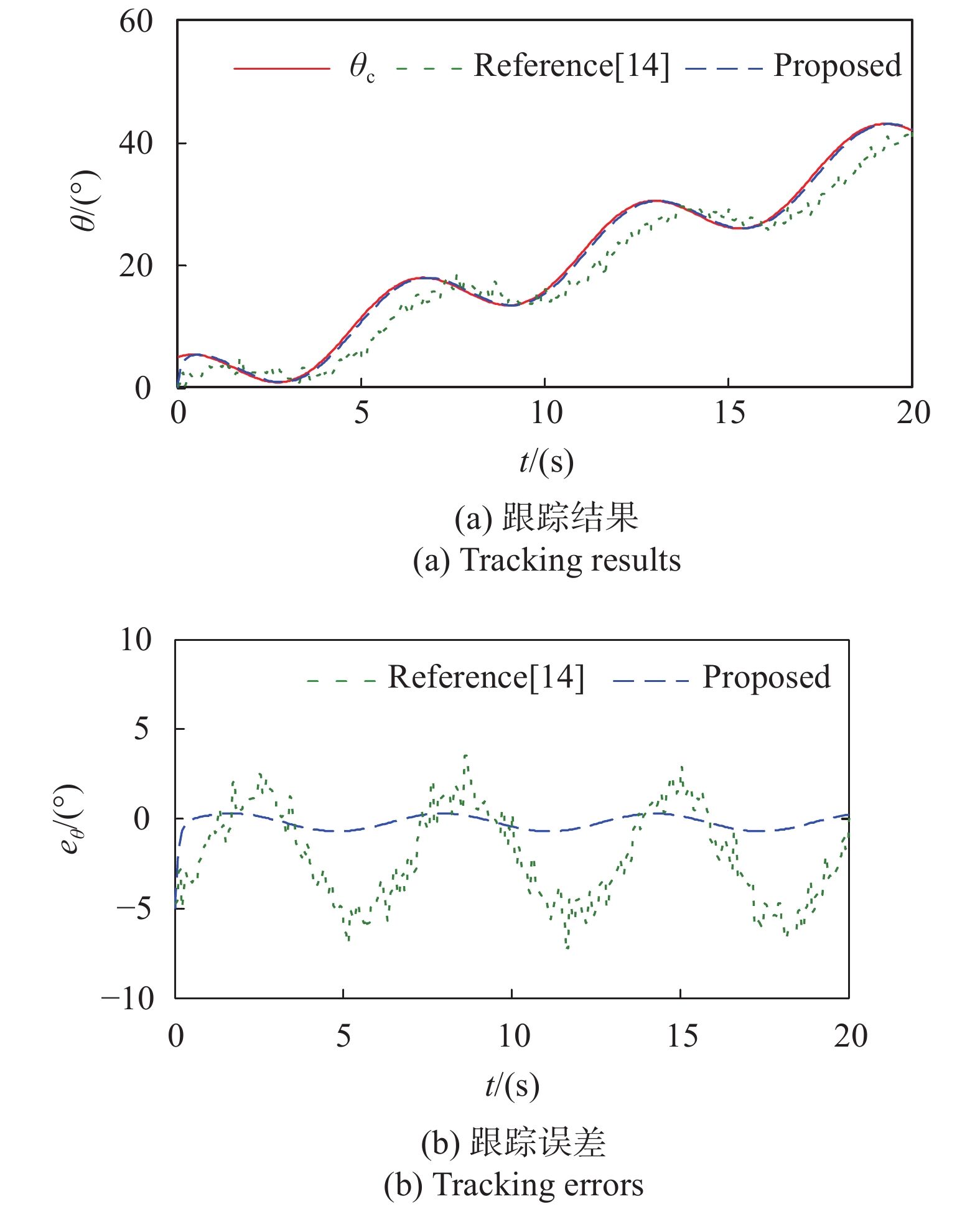
由于目标方位能否对准是衡量三轴机载光电系统控制效果的重要指标,在模拟的复合干扰条件下对方位进行了跟踪仿真,得到俯仰角
$ \theta $ 、滚转角$ \phi $ 和航向角$ \psi $ 的跟踪如图3~图5所示,其中$ {e_\theta } = \theta - {\theta _c} $ 、$ {e_\phi } = \phi - {\phi _c} $ 、$ {e_\psi } = \psi - {\psi _c} $ 。
图 3 俯仰角仿真结果
Figure 3. Simulation results of pitch angle

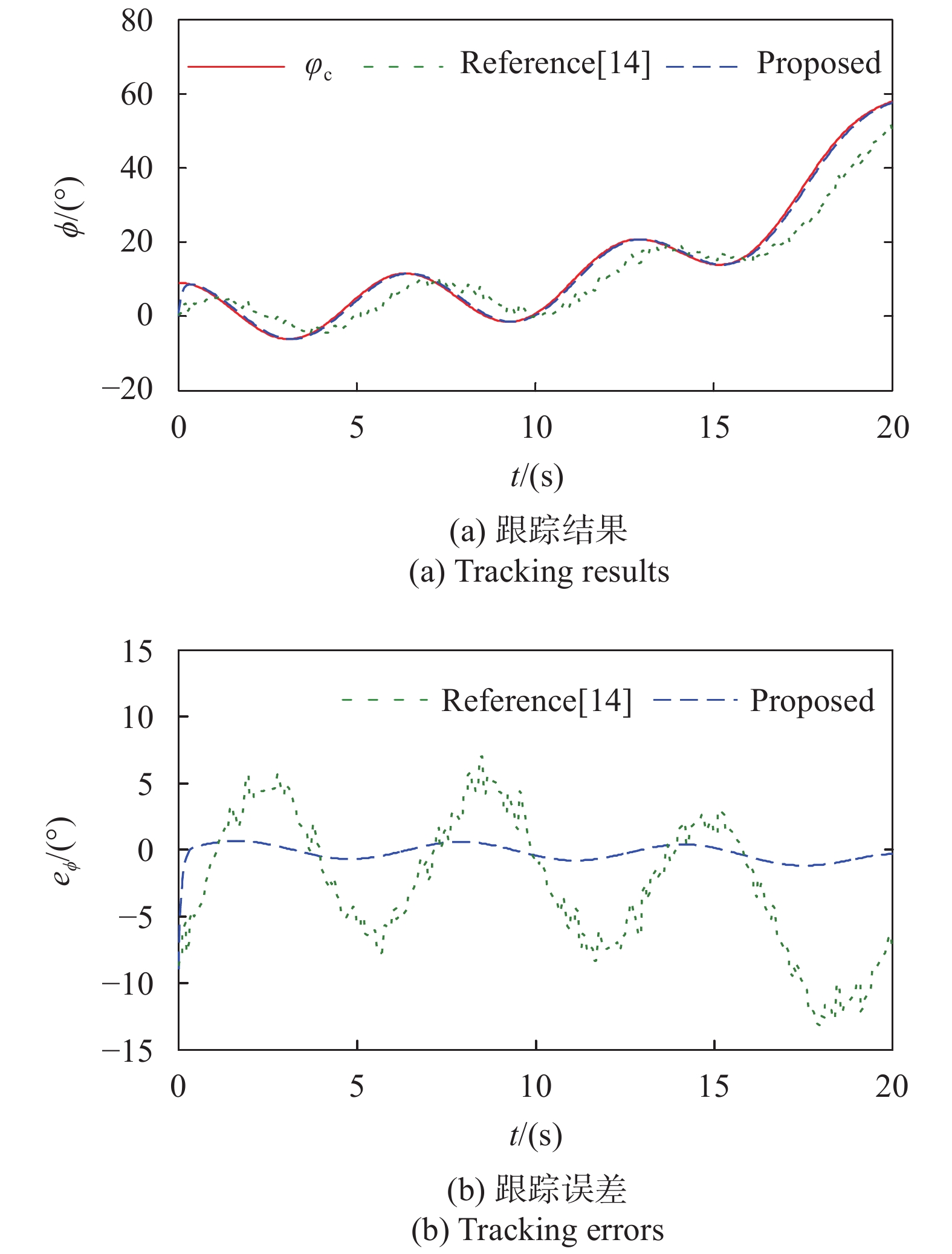
图 4 滚转角仿真结果
Figure 4. Simulation results of roll angle

图 5 航向角仿真结果
Figure 5. Simulation results of heading angle
由图3俯仰角仿真结果可看出,参考文献[14]的分数阶控制方法虽然能够使机载光电系统在2 s后,基本跟上俯仰角指令信号的变化趋势,但是总是滞后于指令信号,并且跟踪误差范围在−7°~4°之间波动,控制精度不高;而在文中控制方法的作用下,机载光电系统能够在300 ms内准确跟踪指令信号,且控制精度更高,最大跟踪误差范围仅为0.5°。
同理,滚转角仿真曲线的分析过程与俯仰角的类似,参考文献[14]的响应时间为2 s,跟踪误差范围在−13°~7°之间波动;而文中控制方法的响应时间仅为300 ms,最大跟踪误差范围仅为0.7°。
同理,航向角仿真曲线的分析过程与俯仰角的类似,参考文献[14]的响应时间为2 s,跟踪误差范围在−8°~5°之间波动;而文中控制方法的响应时间为300 ms,最大跟踪误差范围仅为0.4°。通过对比突出了文中设计的模糊滑模鲁棒控制方法具有更快的响应速度,并且控制精度高,控制效果更优。
-
为了进一步验证文中提出的方法对于干扰的估计效果,给出干扰估计仿真结果如图6所示,其中
$ {e_{{T_d}}} = {\hat T_d} - {T_d} $ 。
图 6 干扰仿真结果
Figure 6. Simulation results of disturbance
由干扰仿真结果可看出:参考文献[14]能够大致估计干扰真实值,但是估计误差较大,误差范围在−2.2~2.3 N·m之间波动,估计精度不高;而文中的模糊算法可以快速准确估计干扰值,最大估计误差仅为0.2 N·m,估计精度高,通过对比突出了文中模糊算法对干扰具有更优的估计效果。
-
为了补偿机体振动和气流扰动对三轴机载光电系统对准精度的影响,提出了一种改进的积分终端滑模鲁棒控制方法,通过引入模糊算法能准确估计出干扰大小,可有效保持机体的稳定性。通过对比仿真实验进行了验证,提出的方法可有效克服机体振动和气流扰动的影响,具有较高的控制精度,俯仰角、滚转角和航向角的最大跟踪误差分别仅为0.5°、0.7°和0.4°,而且具有更快的响应速度,可在300 ms内稳定跟踪指令信号,模糊算法也能够快速、准确地估计出干扰值,最大估计误差仅为0.2 N·m,大幅提高了三轴机载光电系统的对准精度,该控制方法可广泛应用于三轴机载光电设备的对准系统。
Fuzzy sliding mode robust control method for a three-axis airborne optoelectronic system
-
摘要: 为了克服机体振动和气流扰动对三轴机载光电系统对准精度的影响,提出了一种模糊滑模鲁棒控制方法。首先根据坐标转换关系建立了三轴机载光电系统的数学模型,然后引入模糊算法准确估计干扰大小,并设计了模糊滑模鲁棒控制律,最后给出了稳定性分析,能够确保三轴机载光电系统对目标方位的高精度跟踪。仿真结果表明:提出的方法与分数阶控制方法相比,表现出了更优的控制效果,可在300 ms内稳定跟踪指令信号,最大干扰估计误差仅为0.2 N·m,且具有更高的控制精度,对俯仰角、滚转角和航向角的最大跟踪误差分别仅为0.5°、0.7°和0.4°,大幅提高了三轴机载光电系统的对准精度。Abstract: To overcome the influence of body vibration and airflow disturbance on the alignment accuracy of the three-axis airborne optoelectronic system, a fuzzy sliding mode robust control method was proposed. First, the mathematical model of the three-axis airborne optoelectronic system was established according to the coordinate transformation relationship. Then, the fuzzy sliding mode robust control law was designed by introducing a fuzzy algorithm to estimate the interference value. Finally, the stability analysis was given, which can ensure that the three-axis airborne photoelectric system has high-precision tracking for the target orientation. The simulation results show that the proposed method has a better control effect than the fractional order control method, can track the command signal stably in 300 ms, and the maximum interference estimation error is only 0.2 N·m and has higher control accuracy, the maximum tracking error of pitch angle, roll angle and heading angle is only 0.5°, 0.7° and 0.4°, respectively, which greatly improves the alignment accuracy of the three-axis airborne optoelectronic system.
-
表 1 三轴机载光电系统参数
Table 1. Three-axis airborne optoelectronic system parameters
Parameter Value Parameter Value JAxx 0.035 kg·m2 JAyy 0.038 kg·m2 JAzz 0.042 kg·m2 JRxx 0.028 kg·m2 JRyy 0.032 kg·m2 JRzz 0.036 kg·m2 JExx 0.021 kg·m2 JEyy 0.026 kg·m2 JEzz 0.032 kg·m2 Kf 0.00075 N·m·s2/(°)  下载: 导出CSV
下载: 导出CSV
表 2 控制参数
Table 2. Control parameters
Parameter Value Target orientation command ωc=[(2t+5cost)°, (8cost +e0.2t)°,
(10+2t+e0.2t)°]TInterference matrix Td=[0.2t+ e0.1t +2sint]3×1 N·m Parameter of fuzzy sliding mode robust control law g=5, h=3, a=diag{8,9,12},
b=diag{8,6,10}, c=diag{12,9,13}
下载: 导出CSV
-
[1] 刘国强, 陈维义, 陈华东, 等. 采用改进粒子群算法的机载光电平台多目标优化[J]. 西安交通大学学报, 2019, 53(6): 92-100 Liu G Q, Chen W Y, Chen H D, et al. Multi-objective optimization of airborne electro-optical platform with ameliorated particle swarm optimization algorithm [J]. Journal of Xi’an Jiaotong University, 2019, 53(6): 92-100. (in Chinese) [2] 张洋. 机载光电瞄准系统红外灵敏度测试技术[J]. 电光与控制, 2021, 28(3): 90-93 doi: 10.3969/j.issn.1671-637X.2021.03.018 Zhang Y. Infrared sensitivity testing technology of airborne electro-optical targeting system [J]. Electronics Optics & Control, 2021, 28(3): 90-93. (in Chinese) doi: 10.3969/j.issn.1671-637X.2021.03.018 [3] 张敏, 李勃, 滕云杰. 基于迭代学习控制的潜望式激光通信终端系统的动态跟踪设计[J]. 红外与激光工程, 2020, 49(10): 195-202 doi: 10.3788/IRLA20200056 Zhang M, Li B, Teng Y J. Design of dynamic tracking for periscopic laser communication terminal system based on iterative learning control [J]. Infrared and Laser Engineering, 2020, 49(10): 20200056. (in Chinese) doi: 10.3788/IRLA20200056 [4] 辛瑞昊, 喻佳俊, 唐琪, 等. 基于自抗扰控制器的光电平台视轴稳定控制方法[J]. 现代工业经济和信息化, 2021, 11(12):70-72. Xin R H, Yu J J, Tang Q, et al. Stabilization control method for optoelectronic platform based on self-anti-disturbance controller for visual axis [J]. Modern Industrial Economy and Informationization, 2021, 11(12): 70-72. (in Chinese) [5] 王芳, 寇人可, 罗寰, 等. 机载光电雷达性能测试系统的设计[J]. 激光与光电子学进展, 2019, 56(1): 45-50 Wang F, Kou R K, Luo H, et al. Design of airborne photoelectric radar performance test system [J]. Laser & Optoelectronics Progress, 2019, 56(1): 010101. (in Chinese) [6] 陈晓刚, 蔡猛, 戴宁. 基于DOB观测器的机载光电稳定平台扰动抑制方法[J]. 电光与控制, 2020, 27(1): 98-101 doi: 10.3969/j.issn.1671-637X.2020.01.020 Chen X G, Cai M, Dai N. A DOB based disturbance suppression method for airborne photoelectric stabilized platform [J]. Electronics Optics & Control, 2020, 27(1): 98-101. (in Chinese) doi: 10.3969/j.issn.1671-637X.2020.01.020 [7] 张伟明, 史泽林, 马德鹏. 气流扰动下光电系统高精度稳像控制方法[J]. 红外与激光工程, 2019, 48(10): 198-205 doi: 10.3788/IRLA201948.1013008 Zhang W M, Shi Z L, Ma D P. Control method of high accuracy video-stabilization with airstream disturbance for opto-electronic system [J]. Infrared and Laser Engineering, 2019, 48(10): 1013008. (in Chinese) doi: 10.3788/IRLA201948.1013008 [8] 丛敬文, 田大鹏, 沈宏海. 机载光电平台转动惯量耦合自校正干扰抑制控制研究[J]. 机电工程, 2019, 36(7): 749-754 doi: 10.3969/j.issn.1001-4551.2019.07.018 Cong J W, Tian D P, Shen H H. Rotational inertia coupling self-correcting interference suppression control of airborne photoelectric platform [J]. Journal of Mechanical & Electrical Engineering, 2019, 36(7): 749-754. (in Chinese) doi: 10.3969/j.issn.1001-4551.2019.07.018 [9] 陈丹琪, 金国栋, 谭力宁, 等. 基于非线性最小二乘法的无人机机载光电平台目标定位[J]. 光电工程, 2019, 46(9): 84-92 Chen D Q, Jin G D, Tan L N, et al. Target positioning of UAV airborne optoelectronic platform based on nonlinear least squares [J]. Opto-Electronic Engineering, 2019, 46(9): 84-92. (in Chinese) [10] 王诚, 闯家亮, 李江勇, 等. 机载光电探测系统二级稳定控制分析[J]. 激光与红外, 2019, 49(4): 473-476 doi: 10.3969/j.issn.1001-5078.2019.04.014 Wang C, Chuang J L, Li J Y, et al. Analysis of two-stage stabilization control based on airborne electro-optical detection system [J]. Laser & Infrared, 2019, 49(4): 473-476. (in Chinese) doi: 10.3969/j.issn.1001-5078.2019.04.014 [11] 吴卓昆, 佟鑫刚. 机载光电跟瞄半捷联稳定控制技术研究[J]. 光电技术应用, 2018, 33(6): 62-67 doi: 10.3969/j.issn.1673-1255.2018.06.013 Wu Z K, Tong X G. Research on semi-strapdown stabilization technology of airborne electro-optical tracking and pointing system [J]. Electro-Optic Technology Application, 2018, 33(6): 62-67. (in Chinese) doi: 10.3969/j.issn.1673-1255.2018.06.013 [12] 王玫羽, 田大鹏, 郭立红. 面向机载光电平台的串联球面机构运动学建模与验模[J]. 光学精密工程, 2020, 28(8): 1725-1732 Wang M Y, Tian D P, Guo L H. Kinematics modeling and model validation of series spherical mechanism for photoelectric platform [J]. Optics and Precision Engineering, 2020, 28(8): 1725-1732. (in Chinese) [13] 杜亚雯, 董全林, 蒲小琴, 等. 基于模糊滑模的激光导引头伺服控制系统仿真分析[J]. 红外与激光工程, 2019, 48(S2): 37-43 doi: 10.3788/IRLAS213003 Du Y W, Dong Q L, Pu X Q, et al. Simulation and analysis of laser seeker servo control system based on fuzzy sliding model control [J]. Infrared and Laser Engineering, 2019, 48(S2): S213003. (in Chinese) doi: 10.3788/IRLAS213003 [14] 王春阳, 孙靖, 肖博, 等. 机载光电稳瞄平台的扰动观测分数阶控制方法[J]. 控制与决策, 2020, 35(8): 1902-1908 Wang C Y, Sun J, Xiao B. Disturbance observation fractional order control method for airborne photoelectric stabilized platform [J]. Control and Decision, 2020, 35(8): 1902-1908. (in Chinese) -

 点击查看大图
点击查看大图

图(6) / 表(2)
计量
- 文章访问数: 142
- HTML全文浏览量: 23
- PDF下载量: 22
- 被引次数: 0













































































