














-
自适应光学(Adaptive Optics, AO)技术目前已成为大口径地基望远镜实现高分辨率成像的关键技术[1]。由于大气非等晕性的影响,传统AO技术校正视场较小的问题严重限制了其在天文观测中的应用。多层共轭自适应光学技术在结合多导引星对大气湍流进行三维探测的基础上,利用变形镜(Deformable Mirror,DM)进行分层校正,从而降低了这一影响,在大视场范围内提高了望远镜系统的成像分辨能力[2-3]。在实际的天文观测站址中,大部分的湍流都集中在地表层附近。基于这一特性,利用单变形镜仅针对地表层湍流进行校正的地表层自适应光学技术被提出[4]。由于GLAO有着更大的视场范围,这一技术成为AO领域的研究热点。GLAO系统的工作原理复杂,成本高昂,因而通常会预先对GLAO系统的性能进行理论评估,从而指导系统设计与优化,降低成本。
GLAO系统常用的性能评估理论有三种。第一种是基于参数间依赖关系的零阶误差标度律[5],其关系式很多都是基于系统的某种假设或渐近解,因而这类方法仅能提供数量级上的估计。由于数值准确度较低,该评价方法只能被用于系统性能的大概估计。第二种为一阶线性系统解析模型[6-8],其将自适应光学系统高度复杂的物理过程简化为线性系统,为系统性能评估提供了更简单方便的评价工具。在GLAO系统的理论研究中,普遍认为该方法的数值模拟结果是正确的。相对于误差标度律,该理论考虑了不同参数间的线性关系,因而其数值准确度更高。但该模型中系统导引星只能按照环形对称布局设计,而对于系统导引星为非对称排布的任意布局情况下,无法用该模型对系统性能进行仿真评估。第三种为蒙特卡洛数值模拟模型[9-10],由于该模型根据真实系统中光线历经过程进行模拟,因而在任意导引星布局下都可以对系统进行模拟。同时模型所需波动光学的物理规律是完全已知的,因而该方法对真实系统性能预测准确度更高,但该模拟结果的正确性有待验证。文中利用后两种评估方法对GLAO系统进行理论分析与性能评价工作,从而验证两种方法的正确性与准确性,并对二者数值模拟结果的误差来源进行简单分析。
-
由于线性系统理论在频域中有着更简单的形式,因而该理论通常在频谱空间中实现。针对地表层湍流校正的GLAO系统,一般使用长曝光点扩散函数(Point Spread Function, PSF)[11]描述系统校正效果,其光学传递函数(Optical Transfer Function, OTF)表示为:
$$ T\left(k\right)\approx {T}_{0}\left(k\right)\mathrm{e}\mathrm{x}\mathrm{p}[-0.5{\overline{D}}_{\varepsilon}(r\left)\right] $$ (1) 式中:k为像空间频率。假设系统满足各态历经性,该OTF依赖于残余相面
$ \varepsilon \left(\mathit{x}\right) $ 的平均结构函数(Structure Function, SF)${\overline{D}}_{\varepsilon}\left({r}\right)$ [12]:$$ {\overline{D}}_{\varepsilon}\left({r}\right)=\left\langle{{\left[\varepsilon \left({x}+{r}\right)-\varepsilon \left({x}\right)\right]}^{2}}\right\rangle $$ (2) 式中:
$ {x} $ 为瞳面坐标矢量;r为偏移矢量。根据大气分层和空间频谱滤波理论,GLAO系统校正可理解为对不同高度大气湍流进行加权滤波的叠加过程,引入误差传递函数
$ {\left|G\left({f}\right)\right|}^{2} $ 表示系统残余相差功率谱为:$$ {W}_{\varepsilon}\left({f}\right)={W}_{\varphi }\left({f}\right){\left|G\left({f}\right)\right|}^{2} $$ (3) 式中:
$ {f} $ 为瞳面上空间频率。根据维纳-辛坎原理,得到残余相位功率谱${W}_{\varepsilon}\left({f}\right)$ 与${D}_{\varepsilon}\left({r}\right)$ 的表达式:$$ \begin{split} &{D}_{\varepsilon}\left({r}\right)={\left[ϵ\left({x}+{r}\right)-ϵ\left({x}\right)\right]}^{2} =\\ &\left[\mathcal{F}{\left\{{W}_{\varepsilon}\left({f}\right)\right\}}_{r=0}-\mathcal{F}\left\{{W}_{\varepsilon}\left({f}\right)\right\}\right] =\\ &\int \left\{1-{\rm{cos}}\left[2\pi \left({f} \cdot {r}\right)\right]\right\}{W}_{\varepsilon}\left({f}\right){\rm{d}}{f} \end{split} $$ (4) 针对Von Karman湍流模型,根据大气分层理论,第i层的大气相位功率谱为
$ {W}_{\varphi ,i}\left(f\right) $ [13]:$$ {W}_{{\varphi },i}=0.022\,\,9{\left({f}^{2}+{L}_{0}^{-2}\right)}^{-11/6}\times{r}_{0,i}^{-5/3} $$ (5) 式中:
$ {L}_{0} $ 为大气湍流外尺寸;$ {r}_{0,i} $ 为第$ i $ 层大气湍流相干常数,与各层湍流强度$ {J}_{i} $ 有关:$$ {r}_{0,i}^{-\frac{5}{3}}=0.423{\left(\dfrac{2\pi }{\lambda }\right)}^{2}{J}_{i} $$ (6) ETF与系统参数、导引星排布以及湍流高度有关。各层在统计上彼此不相关,因此总功率谱为所有层的功率谱之和。在中心视场角距为
$ {{a}}_{k} $ 的K颗导引星布局下,GLAO系统各层ETF可以表示为:$$ \begin{split} {{\left|G\left({f}\right)\right|}^{2}}_{i}=& 1-2\gamma A\left(f\right)R\left({f}\right)\times \\ &\sum _{k=1}^{K}{w}_{k}\mathrm{cos}\left[2\pi f\left({{a}}_{k}-a\right)h\right]+{\gamma }^{2}{R}^{2}\left({f}\right)\times\\ &\sum _{k=1}^{K}\sum _{{k}^{\text{'}}=1}^{K}{w}_{k}{w}_{k}^{'}\mathrm{c}\mathrm{o}\mathrm{s}\left[2\pi f\left({{a}}_{k}-{{a}}_{k}^{'}\right)h\right] \end{split} $$ (7) 式中:
$ a $ 为目标星与导引星间角距;$ \gamma $ 表示位于高度H处的导引星在高度h湍流层的采样区域与瞳面采样区域直径关系,$ \gamma =1-h/H $ (对于自然导引星,$ \gamma =1 $ )。$ A\left(f\right) $ 为艾里函数;$ R\left({f}\right) $ 为与DM空间分辨率有关的低通滤波器,其具体形式为:$$ R\left({f}\right)=1,f \leqslant 1/2d $$ (8) 式中:d为瞳面对应驱动器间距。各导引星对整体校正的贡献值由权重
$ {w}_{k} $ 引入,该权重满足:$$ \begin{split} \sum _{i=1}^{K}{w}_{k}=1,{0 \leqslant w}_{k} \leqslant 1 \;(i=\mathrm{1,2},3,\cdots ,K) \end{split} $$ (9) $ {w}_{k} $ 优化是GLAO性能提升的另一个关键问题,而文中意在分析GLAO系统性能评估方法,与$ {w}_{k} $ 的选取无关。文中基于平均算法进行相关工作,即各导引星权重$ {w}_{k}=1/K $ 。结合公式(5)和(7),并按
$ {r}_{0,i} $ 归一化得到各层残余相差SF为:$$ \begin{split} {D}_{ϵ,i}\left({r}\right)=&0.002\,\,29\times \int \left\{1-{\rm{cos}}\left[2\pi \left({f} \cdot {r}\right)\right]\right\}\times\\ &{\left({f}^{2}+{L}_{0}^{-2}\right)}^{-11/6}{\left|{G}_{i}\left({f}\right)\right|}^{2}{\rm{d}}{f} \end{split} $$ (10) 进而将各层SF按Ji引入到所有层的
${D}_{ϵ}\left({r}\right)$ :$$ {D}_{ϵ}\left(\mathit{r}\right)=0.423{\left(2\pi /\lambda \right)}^{2}\times \sum _{i=1}^{N}{J}_{i}{D}_{ϵ,i}\left(\mathit{r}\right) $$ (11) 最终结合公式(1)和(11)即可得到系统的长曝光PSF,进而为后续GLAO性能分析工作的开展提供评价依据。
-
利用蒙特卡洛方法对GLAO系统的模拟包括模拟光波在大气中的传播,波前探测、校正等过程以及设计湍流相位屏[14]。根据大气湍流的功率谱密度函数反演生成多帧随机相位屏,以模拟真实大气湍流对于光波传输的影响[15]。在模拟系统时,按照经典的大气湍流折射率结构函数模型或一些典型站址的实测湍流分布,得到离散化的多层湍流模型,基于每层湍流强度生成相位屏。对于不同的湍流模型而言,其各层的参数设置是固定的,包括高度、风速、
$ {r}_{0} $ 等参数。在此基础上,通过设置上述参数使相位屏各层独立运动,产生相应的相位变化,最终将各层相位变化叠加起来得到系统对于波前总的相位变化信息。通过对系统长曝光近场残余相面进行傅里叶变换得到系统的远场长曝光PSF,进而基于该PSF进行GLAO系统性能分析与验证工作。 -
GLAO系统利用多导引星技术进行地表层波前探测时,不同方向间光束历经湍流情况的不同使得系统校正效果有所不同。因而湍流分布与导引星布局自然是影响其成像质量的主要因素,其中导引星布局又与数目和排列方式相关。为便于理解与区分,文中称GLAO系统校正后成像视场为全视场(Field of View, FOV),称全视场离散化后进行性能评价的视场为校正视场(Corrected FOV, CFOV),称导引星所处的视场位置为探测视场(Sensing FOV, SFOV)。以圆域视场示例说明,如图1所示,随导引星个数的增多,各导引星沿探测视场处按环状均匀分布。其中,第一行导引星排布沿探测视场处呈单环布局;第二行导引星呈中间一颗,其余沿探测视场处排布的双环布局。导引星探测视场的优化分析是基于全视场的,如图2所示。文中利用两种模型在不同导引星布局下模拟GLAO系统性能,进而对比两种方法。
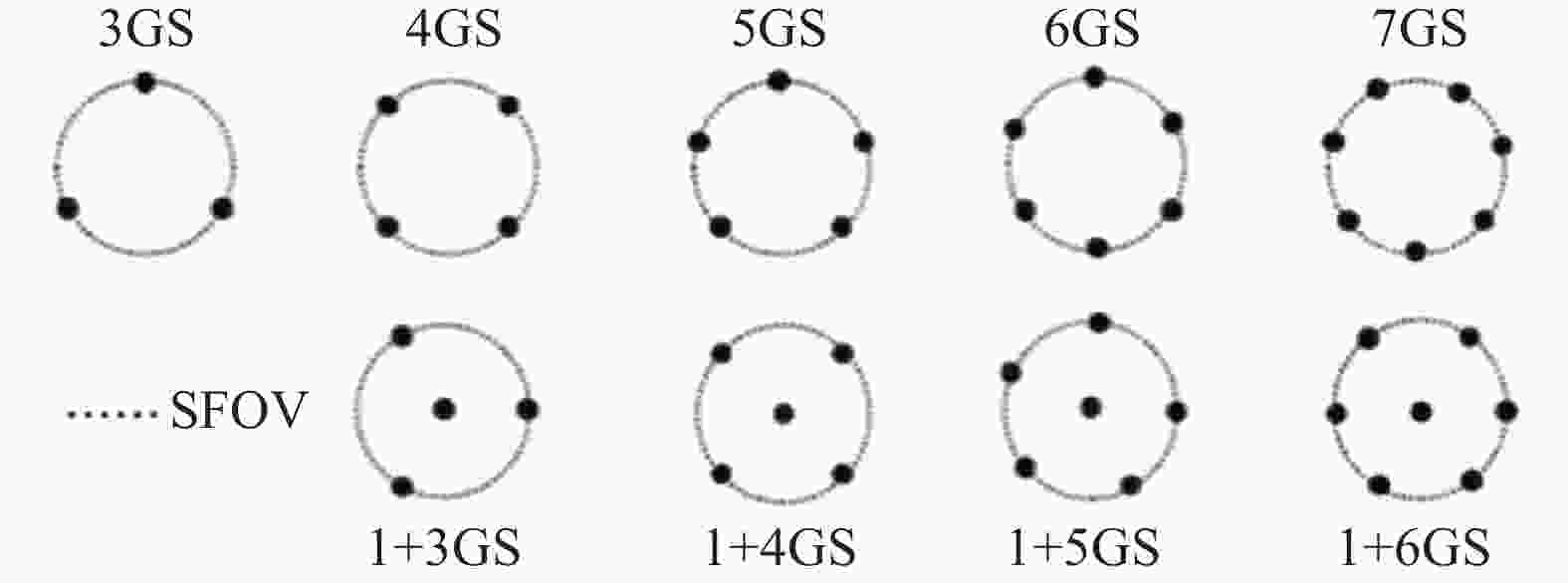
图 1 导引星不同个数与排布方式示意图
Figure 1. Schematic diagram of GS with different numbers and arrangements

图 2 导引星不同探测视场示意图
Figure 2. Schematic diagram of GS with different SFOV
此外,为了更准确地分析不同视场区域的提升效果,对视场进行了环带划分。由Kolmogorov湍流理论可知,在空间任意两点间距固定的情况下,在一定活动范围内可认为该湍流是均匀各向同性的。假设全视场范围内的湍流条件符合该均匀各向同性理论,因此在距离中心视场相同距离、不同方向处,其成像效果也应满足一致性。如图3所示,将圆域视场划分为七个环带。利用不同视场环带内校正后的长曝光PSF半高全宽的均值
${FWHM}_{{\rm{ave}}}$ 衡量系统的平均校正效果,也称为系统的平均分辨率。${FWHM}_{{\rm{ave}}}$ 越小,表示处于该导引星布局下系统不同视场间的平均校正效果更佳。
图 3 视场环带图
Figure 3. Schematic diagram of FOV annulus
-
利用空间滤波理论与蒙特卡洛方法对GLAO系统进行建模,并对两种方法的建模过程与结果进行对比分析。其中,针对不同的导引星布局与湍流环境对系统校正性能的影响进行分析。系统的仿真参数与分析过程如下。
-
系统输入参数主要包括系统参数与环境参数。系统参数主要是望远镜与GLAO系统参数,如表1所示;环境参数主要指大气湍流模型与大气相干长度r0,共采用两种大气湍流模型:Cerro Pachon站址实测数据拟合CP-7模型 [16],分层情况如表2所示。大气视宁度与r0大小有如表3的定性关系[17]。仿真用r0为7、10、15 cm分别模拟“Bad”、“Typical”、“Good”三种大气环境下GLAO校正性能。
表 1 系统参数
Table 1. Parameter of the system
Basic parameter Spatial spectrum filter Monte Carlo Telescope diameter 2.5 m Cut-off frequency 1 m−1 Sampling period 0.7 s FOV Φ5′ Sampling rate 64 Frame number 500 Sensing/Imaging wavelength 0.55/0.705 μm Outer scale turbulence ${{L} }_{ { {{0} } } }$ 30 m Turbulence phase screen Layers number 7 Grids number 4096$ \times $4096(1-4)
8192$ \times $8192(5-7)表 2 CP-7湍流廓线模型
Table 2. Turbulence profile model of CP-7
hi 1 2 3 4 5 6 7 Height/km 0 1.80 3.20 5.80 7.40 13.00 15.80 Fractional ${{C} }_{{n} }^{ {{2} } }$ 0.646 0.078 0.119 0.035 0.025 0.08 0.015 表 3 视宁度与r0的关系
Table 3. Relationship between seeing and r0
r0/cm ≤8 8-15 15-20 ≥20 Seeing Bad Typical Good Great -
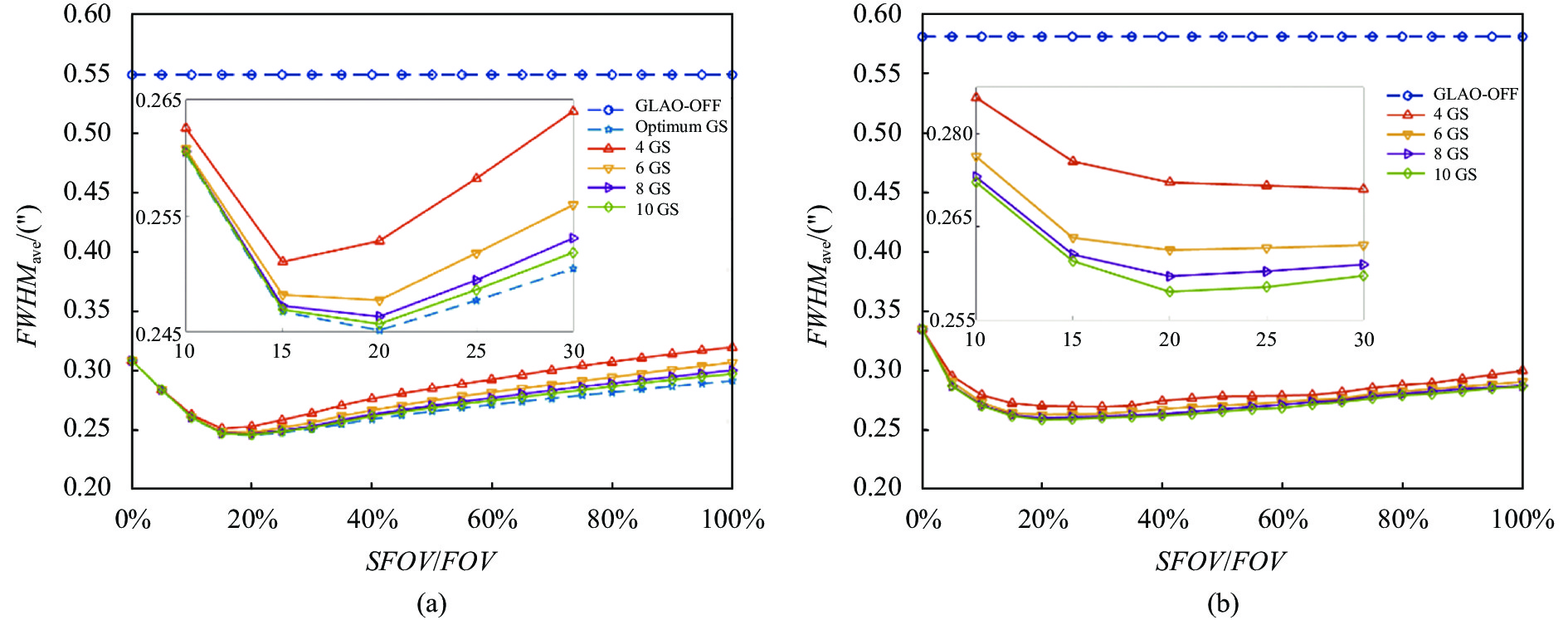
首先利用两种模型针对不同的导引星探测视场与个数对GLAO系统进行仿真。在r0=15 cm的CP-7湍流环境下,各导引星呈单环排列方式,针对遍历全视场的21个探测视场分析了GLAO系统的全视场校正性能,如图4所示。其中,图4(a)为空间频谱滤波模型计算的导引星处于不同探测视场下全视场的平均校正效果。分析可知,随着探测视场占比的增大,系统全视场平均分辨率呈先增后减的规律,且探测视场位于全视场的20%时,系统全视场平均分辨率最高约为0.247″。图4(b)为蒙特卡洛模型计算的导引星处于不同探测视场下全视场的平均校正效果,通过与图4(a)对比可知,两种方法的特征规律保持一致。

图 4 不同模型下GLAO系统全视场平均校正效果,其中“o”虚线代表开环,其余代表不同导引星数目下的闭环校正效果。(a) 空间频谱滤波模型;(b)蒙特卡洛模型
Figure 4. GLAO average correction effect of FOV by different models. "o" line denotes the GLAO in open loop, and others denote different numbers of GSs in close loop. (a) Spatial frequency spectrum filtering model; (b) Monte Carlo model
同时,图4(a)中各曲线分别代表了4、6、8、10、无数个单环导引星,通过对比可知,系统校正性能随导引星个数增多而提升,且收益逐渐降低。当个数大于八以上时系统校正效果的提升并不明显,10个导引星与无限个导引星下理想系统全视场平均分辨率相差小于0.005″。
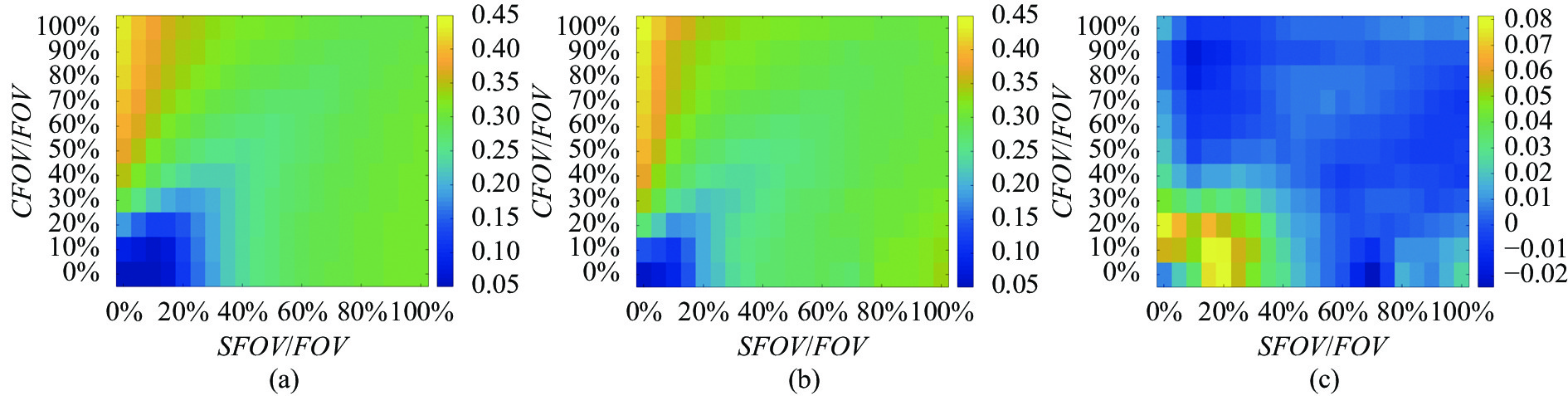
为了更清晰地分析不同校正视场的提升效果,将视场划分为11个等距校正环带,针对六个导引星呈单环布局分析了GLAO系统不同校正视场的校正性能。如图5(a)、(b)分别为两种模型的计算结果,图5(c)为两种模型的差值。通过对比可知,两种模型得到的系统不同校正视场校正规律保持一致,但在全视场平均校正数值上大约有0.01″的偏差。这是由于一阶空间频谱滤波模型建立在系统是各态遍历性假设的基础上,该结果是将复杂系统理想化后的计算结果,因而其数值解偏小。而蒙特卡洛模型则按照光束真实经历模拟系统的工作状态,包含了实际系统中很多非线性甚至随机性现象,对于这些现象带来的很多高阶像差,GLAO系统是无法完全校正的,导致其数值解偏大。两种方法原理性的差异是导致二者数值解存在微小偏差的根本原因。此外,在蒙特卡洛模型的仿真过程中,忽略了哈特曼波前传感器的采样过程、变形镜校正过程以及衍射传输过程等。若期望蒙特卡洛系统达到空间频谱滤波模型的各态遍历性,则需要运行无限长的时间,而仿真中只使用了500帧随机相位屏数据,时间采样不足可能是导致两种方法数值解存在偏差的另一原因,但数值大小的微小差异对于系统收益特征规律的分析并无影响。

图 5 不同模型下GLAO系统各校正视场平均校正效果。 (a) 空间频谱滤波模型; (b) 蒙特卡洛模型; (c)两种模型的差值
Figure 5. GLAO average correction effect of FOV by different models. (a) Spatial frequency spectrum filtering model; (b) Monte Carlo model; (c) The value variance between two models
综上所述,利用两种模型研究导引星不同个数与探测视场对GLAO系统性能的影响关系时,两种模型计算得到的特征规律保持一致。
-
在导引星探测视场、个数固定的情况下,分析不同导引星排布方式与湍流环境下的校正效果,从而更全面地比较两种模型的适用范围。相对于AO系统,GLAO系统不追求衍射极限,其致力于在大视场范围内提高成像分辨率。对于GLAO系统最优性能而言,应该满足大视场内各局部小视场成像质量均较高,因而在对比分析不同排布方式时应着重关注各视场环带的成像质量。由图5可知,探测视场范围为全视场的70%~80%,不同校正视场的平均分辨率均较高,大约为0.27'',即导引星处于该探测视场范围内时,系统大视场内各局部小视场的成像质量均处于较高水平。
经3.2节分析可知,GLAO系统校正性能随导引星个数的增多而提升,不同个数下视场内各环带的校正特征规律保持不变,也就是说,任一固定导引星数目下对导引星排布方式特征规律的分析都可代表该类导引星排布方式的特征。由上述仿真分析可知,六个导引星下系统校正效果的提升较为明显,六个导引星所对应的排布方式共有两种:六个导引星均匀排布于探测视场处的单环布局与视场中心一个、其余五个沿探测视场处均匀分布的双环布局。图6所示为两种排布方式下各视场环带的成像分辨率,其探测视场为全视场的70%~80%,从上至下分别为不同湍流环境下的校正结果,从左至右分别为空间频谱滤波模型、蒙特卡洛模型的计算结果及二者的差值。分析图6(a)可知,相对于开环,经GLAO系统校正后分辨率提高约45%。单环排布方式下系统各环带平均分辨率在5′视场内都保持较高水平,即在全视场范围内高成像质量的起伏更小,稳定范围更大;双环排布方式下由于中心视场优异的校正效果,致使全视场范围内成像质量的起伏较大,只有距中心1′外视场的成像质量才能保持较好的稳定性。两种排布方式各有优势,在系统全视场成像分辨率相差不超过0.03″的情况下,单环布局下全视场内高成像质量的视场范围更大。此外,对比图图6(a)、(d)、(g)可知,不同湍流环境下导引星布局特性一致,验证了空间频谱滤波模型适用于不同的湍流环境。

图 6 不同湍流环境下各视场环带平均校正效果图,其中“o”虚线代表开环,“
$ \Delta $ ”与“$ \nabla $ ”分别代表导引星呈单环与双环“1+5”下系统闭环校正效果。从上至下代表所处湍流强度r0分别为15、10、7 cm,从左至右分别代表空间频谱滤波模型、蒙特卡洛模型及两种模型的差值Figure 6. GLAO average correction of FOV annulus under different turbulence profile. "o" line denotes the GLAO in open loop, "
$ \Delta $ " and "$ \nabla $ " denotes the GLAO in close loop with single ring and "1+5" with double rings GSs. From top to bottom: r0=15 cm, r0=10 cm, r0=7 cm. From left to right: Spatial frequency spectrum filtering model, Monte Carlo model and the value variance between two models此外,利用空间频率滤波模型得到系统开环时各校正视场平均分辨率相等。这是由于空间频谱滤波理论在基于大气功率谱分析系统开环性能时忽略了位置因素,因而关于不同校正视场处的性能仿真结果相同。为了更清晰地了解不同校正视场的提升情况,在相同参数设置下利用蒙特卡洛法进行模拟,如图6(b)、(e)、(h)所示。通过与空间频谱滤波理论的模拟结果对比可知,两种方法得到的系统校正特征规律保持一致。但笔者发现,随着湍流强度的增大,两种模型对于系统闭环模拟的数值偏差逐渐变大,如图6(c)、(f)、(i)所示。这是由于在蒙特卡洛模拟过程中忽略了哈特曼波前传感器采样与变形镜校正的过程,因而利用蒙特卡洛模拟下系统的校正效果未随湍流环境恶劣程度的加剧而明显降低。但对于一个参数固定的GLAO系统来说,由于受变形镜面形变化范围的限制,该系统能有效校正的最大程度也是有限的,因而实际系统的校正效果会随着湍流强度的增大明显降低。此外,对于不同的湍流强度,不同校正视场间两种方法数据偏差的特征规律是一致的,并且蒙特卡洛模型可以更清晰地模拟不同校正视场的提升情况。
综上所述,两种模型在不同导引星排列方式与湍流环境下系统仿真特征规律保持一致。同时发现在不同湍流环境下,在系统全视场平均分辨率相差不大的情况下,单环导引星布局的校正效果更佳均匀。
-
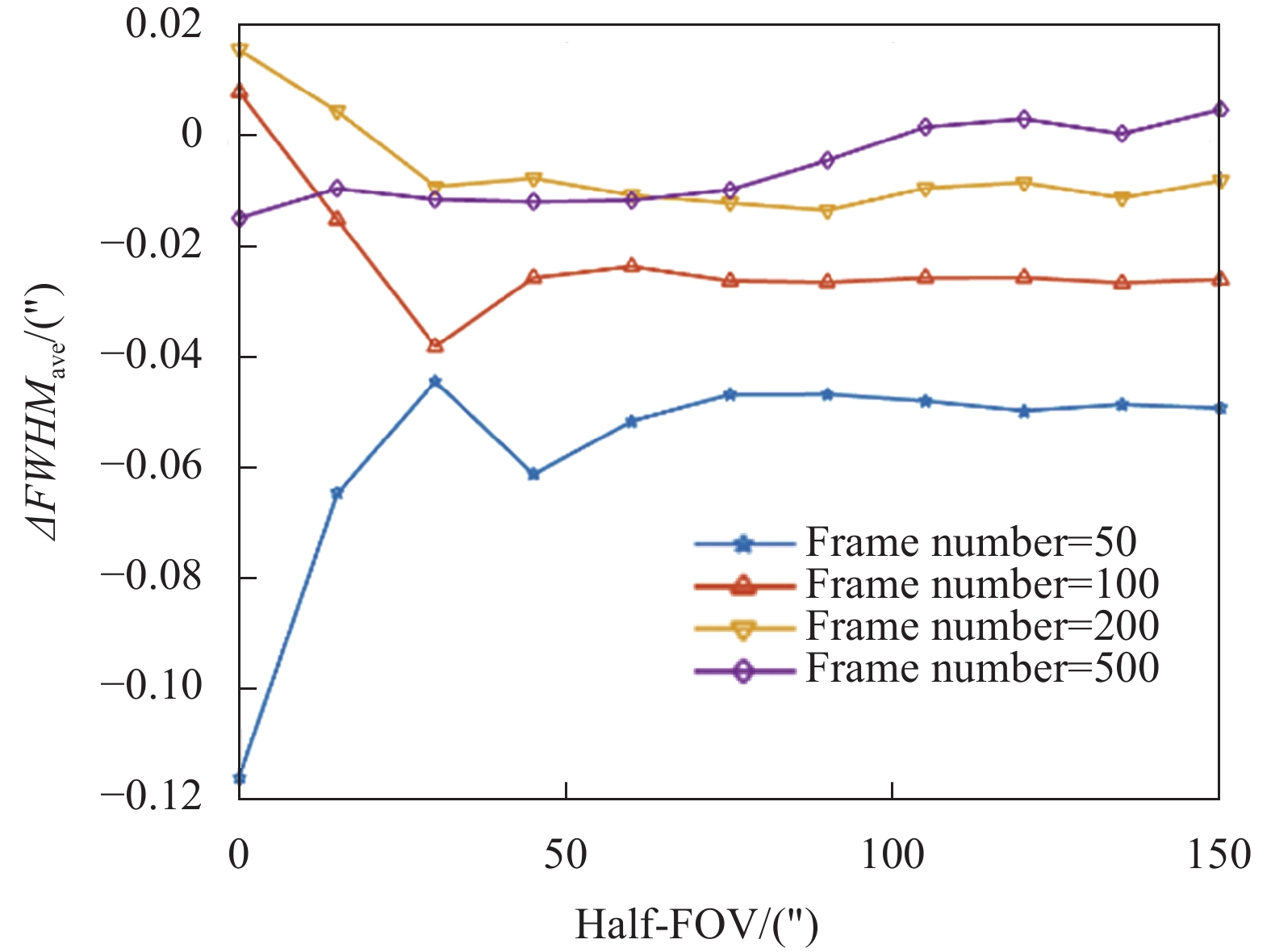
通过对比分析基于空间频谱滤波理论的解析结果和蒙特卡洛模拟结果,可以发现两种方法在数值大小上有微小偏差。基于3.2节中的分析,首先对比分析了不同采样帧数对系统校正效果的影响。利用蒙特卡洛模型在时间采样帧数分别为50、100、200、500下得到了不同视场环带的校正效果,图7所示为不同帧数下蒙特卡洛模型与空间频谱滤波模型的数值偏差,其中湍流环境与系统等参数设置与图6(a)相同。分析图7可知,随着时间采样的增多,蒙特卡洛系统模拟的随机误差减小,各视场环带的模拟结果更为平滑,两种方法模拟结果的数值差距明显减小,但采样时长为500帧的数值绝对差相对于200帧时的绝对差没有明显变化,系统仍存在约0.01″的偏差。这意味着增大蒙特卡洛方法的时间采样率可以在一定范围内减小两种模型的数值模拟偏差,但并不能完全消除。在蒙特卡洛模拟忽略哈特曼采样与变形镜的校正、衍射传输等过程及时间采样足够大的基础上,相对于蒙特卡洛模型,空间频谱滤波模型在良好湍流环境下对于系统闭环全视场平均校正效果的数值模拟偏差最大不超过4.6%。
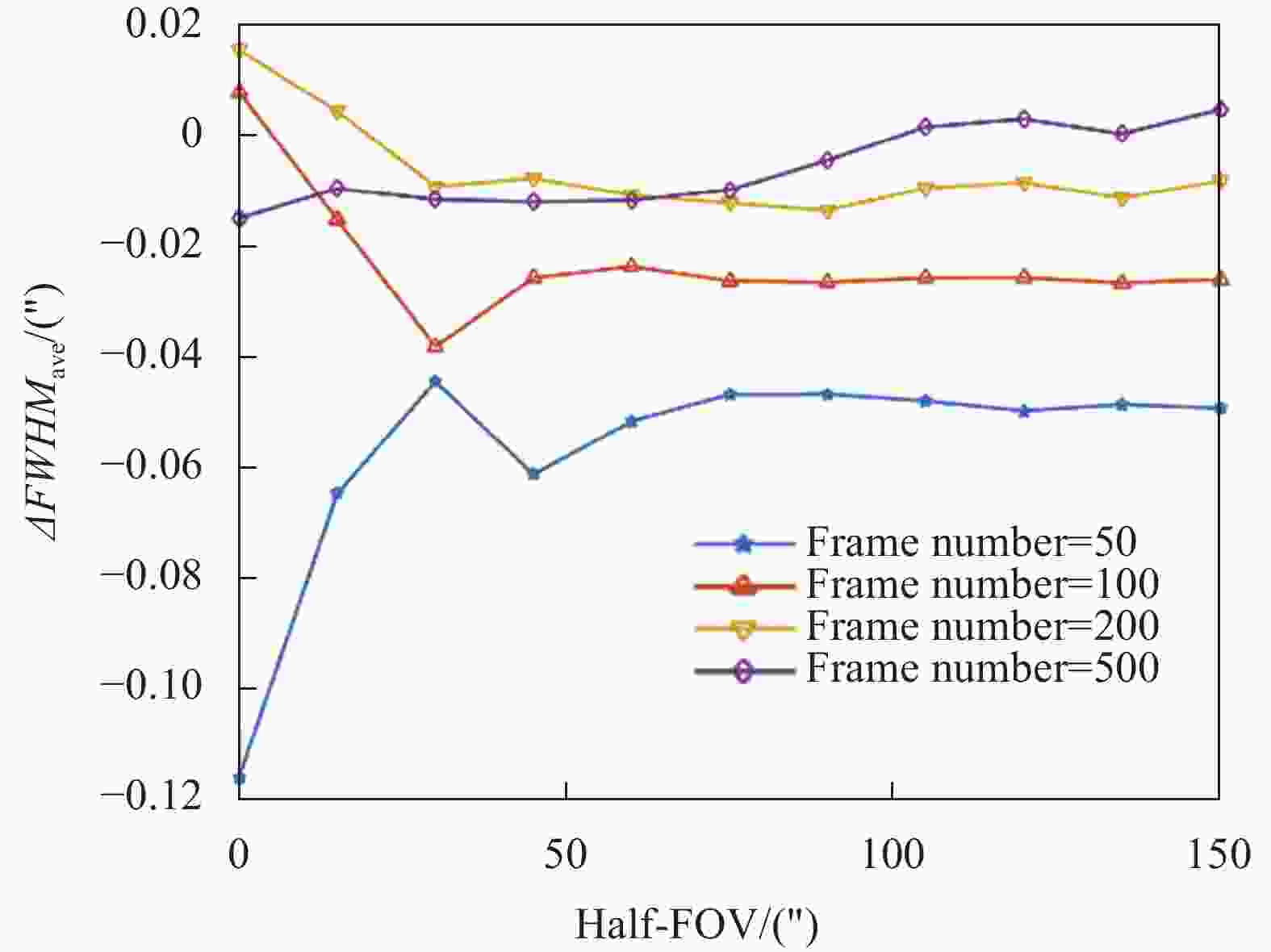
图 7 不同采样帧数下两种模型的数值偏差
Figure 7. The value variance of different frame numbers under two models
实际上,系统校正后相位残余误差分为两类,分别为线性误差与其他误差。基于空间频谱滤波理论的解析模型,利用线性算符将GLAO参数空间联系在一起,将复杂系统简化为线性系统,其系统模拟残余误差仅来源于系统的线性部分。利用该方法只能得到理想线性系统的模拟结果,对于线性以外的现象,该系统是无法模拟的。而蒙特卡洛方法基于几何光学的物理规律上,按照光束真实经历模拟系统的工作状态,将实际系统中的很多非线性甚至随机现象都包含在内。对于这些现象带来的很多高阶像差,GLAO系统是无法完全校正的。该模拟方法下系统的残余误差包含了系统的线性与其他误差,其数值结果更接近真实系统。二者方法原理性的差异是模拟结果产生偏差的根本原因,但该数值上的偏差不影响分析系统的校正特性。
同时,可以发现空间频谱滤波理论的实现过程更为简单,计算速度更快,便于发现系统的特征规律。但其忽略了实际系统中哈特曼测量误差、变形镜拟合误差、系统倾斜校正、精跟踪过程以及各部分的时间延迟,尤其是针对非对称的任意导引星布局,解析计算有一定的局限性,对于系统性能优化分析有一定的限制。而上述缺陷不存在于蒙特卡洛模拟。此外,蒙特卡洛模型还可以得到系统任一时刻的工作性能,但若期望系统有较高的实时性,则对于系统的软硬件资源也提出了更高的要求。因此,在实际工作中可以根据需求选择模拟方法,从而更高效率地完成系统分析与设计,为未来天文观测提供更优异、更稳定的系统。
-
文中从大视场GLAO系统高分辨力成像需求出发,围绕不同的湍流分布与导引星布局,利用空间频谱滤波理论与蒙特卡洛方法对GLAO系统性能进行理论分析,从而对比两种评估方法。结果表明,两种模型得到的系统校正规律呈现明显的一致性。在一定条件下,两种方法数值模拟偏差最大不超过4.6%。空间频谱滤波原理将系统简化为线性模型,其计算速度更快,便于发现系统特征规律,不适用于非对称排布的任意导星布局解析分析。蒙特卡洛方法结合真实系统的物理过程进行实时模拟,其导引星布局可以任意设置,对于系统实际运行状态的预测更加准确。文中在两种分析方法对比的基础上,进一步针对系统布局给出了初步的优化结果,相关工作对未来GLAO系统的设计与优化具有指导意义。
Analysis of performance evaluation methods of wide-field ground-layer adaptive optics
-
摘要: 在天文大视场高分辨率成像领域,对地表层自适应光学(Ground-Layer Adaptive Optics, GLAO)系统作出准确的理论评估是系统设计与优化的关键前提。在GLAO技术中,地表层湍流特性与导引星布局是影响系统性能的重要因素。针对不同湍流环境与导引星位置分布,基于空间频谱滤波理论和蒙特卡洛方法对GLAO系统进行理论分析与性能评价工作,从而验证两种方法的正确性与准确性。结果表明,两种模型得到的系统校正规律呈现明显的一致性。在一定条件下,两种方法数值模拟偏差最大不超过4.6%。空间频谱滤波原理将系统简化为线性模型,其计算速度更快,便于发现系统特征规律,但是该方法适用于导引星呈对称布局的系统性能分析,不适用于非对称排布的任意导星布局解析分析。蒙特卡洛方法结合真实系统的物理过程进行实时模拟,其导引星布局可以任意设置,对于系统实际运行状态的预测更加准确。在两种分析方法对比的基础上,进一步针对系统布局给出了初步的优化结果,相关工作对未来GLAO系统的设计与优化具有指导意义。Abstract: The performance evaluatation of ground layer adaptive opitcs (GLAO) is helpful for system design and optimization. The turbulence distribution and the layout of the guide stars (GSs) are the main factors affecting GLAO performance. Considering the impact of the turbulence distribution and the layout of GSs, the performance of GLAO was analysed and evaluated by comparing spatial frequency spectrum filtering theory and Monte Carlo simulation. The results show that the conclusions of the two methods are clearly consistent with an error margin of less than 4.6%. Spatial frequency spectrum filtering simplifies the system into a linear model and it is simpler and faster for the calculation, which is convenient for discovering the characteristic rules. However, the accuracy is slightly low if considering the noise and error in a real system. In addition, this method is suitable for analysing the system performance with a symmetrical GS layout. The Monte Carlo method is better for simulating the system running state in detail with a random GS layout. The brief results of the system performance analysis are given in the end by combining the two methods. The study will be useful for the system design and optimization of future GLAOs.
-
图 1 导引星不同个数与排布方式示意图
Figure 1. Schematic diagram of GS with different numbers and arrangements
图 4 不同模型下GLAO系统全视场平均校正效果,其中“o”虚线代表开环,其余代表不同导引星数目下的闭环校正效果。(a) 空间频谱滤波模型;(b)蒙特卡洛模型
Figure 4. GLAO average correction effect of FOV by different models. "o" line denotes the GLAO in open loop, and others denote different numbers of GSs in close loop. (a) Spatial frequency spectrum filtering model; (b) Monte Carlo model
图 5 不同模型下GLAO系统各校正视场平均校正效果。 (a) 空间频谱滤波模型; (b) 蒙特卡洛模型; (c)两种模型的差值
Figure 5. GLAO average correction effect of FOV by different models. (a) Spatial frequency spectrum filtering model; (b) Monte Carlo model; (c) The value variance between two models
图 6 不同湍流环境下各视场环带平均校正效果图,其中“o”虚线代表开环,“
$ \Delta $ ”与“$ \nabla $ ”分别代表导引星呈单环与双环“1+5”下系统闭环校正效果。从上至下代表所处湍流强度r0分别为15、10、7 cm,从左至右分别代表空间频谱滤波模型、蒙特卡洛模型及两种模型的差值Figure 6. GLAO average correction of FOV annulus under different turbulence profile. "o" line denotes the GLAO in open loop, "
$ \Delta $ " and "$ \nabla $ " denotes the GLAO in close loop with single ring and "1+5" with double rings GSs. From top to bottom: r0=15 cm, r0=10 cm, r0=7 cm. From left to right: Spatial frequency spectrum filtering model, Monte Carlo model and the value variance between two models
图 7 不同采样帧数下两种模型的数值偏差
Figure 7. The value variance of different frame numbers under two models
表 1 系统参数
Table 1. Parameter of the system
Basic parameter Spatial spectrum filter Monte Carlo Telescope diameter 2.5 m Cut-off frequency 1 m−1 Sampling period 0.7 s FOV Φ5′ Sampling rate 64 Frame number 500 Sensing/Imaging wavelength 0.55/0.705 μm Outer scale turbulence ${{L} }_{ { {{0} } } }$ 30 m Turbulence phase screen Layers number 7 Grids number 4096 $ \times $ 4096(1-4)
8192$ \times $ 8192(5-7) 下载: 导出CSV
下载: 导出CSV
表 2 CP-7湍流廓线模型
Table 2. Turbulence profile model of CP-7
hi 1 2 3 4 5 6 7 Height/km 0 1.80 3.20 5.80 7.40 13.00 15.80 Fractional ${{C} }_{{n} }^{ {{2} } }$ 0.646 0.078 0.119 0.035 0.025 0.08 0.015
下载: 导出CSV
表 3 视宁度与r0的关系
Table 3. Relationship between seeing and r0
r0/cm ≤8 8-15 15-20 ≥20 Seeing Bad Typical Good Great
下载: 导出CSV
-
[1] Jiang Wenhan. Overview of adaptive optics development [J]. Opto-Electronic Engineering, 2018, 45(3): 7-21. (in Chinese) [2] Ulrich M H. ESO conference on very large telescopes and their instrumentation [C]//ESO Conference and Workshop Proceedings, 1988, 1 & 2: 30. [3] Beckers J M. Detailed compensation of atmospheric seeing using multiconjugate adaptive optics[C]//Active Telescope Systems. International Society for Optics and Photonics, 1989, 1114: 215-219. [4] Rigaut F. Ground conjugate wide field adaptive optics for the ELTs [C]//European Southern Observatory Conference and Workshop Proceedings, 2002, 58: 11. [5] Hardy J W. Adaptive Optics for Astronomical Telescopes[M]. New York: Oxford University Press, 1998. [6] Ellerbroek B L. First-order performance evaluation of adaptive-optics systems for atmospheric-turbulence compensation in extended-field-of-view astronomical telescopes [J]. JOSA A, 1994, 11(2): 783-805. doi: 10.1364/JOSAA.11.000783 [7] Tokovinin A. Seeing improvement with ground‐layer adaptive optics [J]. Publications of the Astronomical Society of the Pacific, 2004, 116(824): 941-351. doi: 10.1086/424805 [8] Chen Jingyuan, Li Youkuan. First-order theoretical model for laser guide star adaptive optics system [J]. High Power Laser and Particle Beams, 2009, 21(5): 649-657. (in Chinese) [9] Andersen D R, Stoesz J, Morris S, et al. Performance modeling of a wide‐field ground‐layer adaptive optics system [J]. Publications of the Astronomical Society of the Pacific, 2006, 118(849): 1574. doi: 10.1086/509266 [10] Correia C M, Bond C Z, Sauvage J F, et al. Modeling astronomical adaptive optics performance with temporally filtered Wiener reconstruction of slope data [J]. JOSA A, 2017, 34(10): 1877-1887. doi: 10.1364/JOSAA.34.001877 [11] Ge Qi, Wang Kedong, Zhang Hong, et al. Estimation of point spread function for long-exposure atmospheric turbulence-degraded images [J]. Infrared and Laser Engineering, 2014, 43(4): 1327-1331. (in Chinese) doi: 10.3969/j.issn.1007-2276.2014.04.055 [12] Véran J P, Rigaut F, Maıtre H, et al. Estimation of the adaptive optics long-exposure point-spread function using control loop data [J]. JOSA A, 1997, 14(11): 3057-3069. doi: 10.1364/JOSAA.14.003057 [13] Whiteley M R, Roggemann M C, Welsh B M. Temporal properties of the Zernike expansion coefficients of turbulence-induced phase aberrations for aperture and source motion [J]. JOSA A, 1998, 15(4): 993-1005. doi: 10.1364/JOSAA.15.000993 [14] Li Jun, Chen Haiqing, Ren Wenxin, et al. Simulation of the optical parts in an adaptive optics system [J]. Journal of Optoelectronics · Laser, 2006, 17(6): 669-672. (in Chinese) doi: 10.3321/j.issn:1005-0086.2006.06.006 [15] Li Dun, Ning Yu, Wu Wuming, et al. Numerical simulation and validation method of atmospheric turbulence of phase screen in rotation [J]. Infrared and Laser Engineering, 2017, 46(12): 1211003. (in Chinese) [16] Ellerbroek B L, Rigaut F J. Scaling multiconjugate adaptive optics performance estimates to extremely large telescopes[C]//Adaptive Optical Systems Technology. International Society for Optics and Photonics, 2000, 4007: 1088-1099. [17] Song Zhengfang, Yang Gaochao, Liu Xiaochun, et al. Measurements of atmospheric seeing in Yunnan Observatory [J]. Chinese J Quantum Electron, 1997, 14(1): 68-74. (in Chinese) -

 点击查看大图
点击查看大图

计量
- 文章访问数: 218
- HTML全文浏览量: 62
- PDF下载量: 28
- 被引次数: 0








































