






-
点目标探测红外遥感器所探测目标的投影面积与探测距离对应的立体角远小于遥感器自身的瞬时视场,点目标探测红外遥感技术在天文观测、系统防御、成像制导等领域得到了广泛应用。探测信噪比是表征遥感器探测能力的主要技术指标之一[1],它与遥感器收集目标能量能力、遥感器系统噪声特性相关。其中,遥感器收集目标能量能力与光学入瞳面积、探测距离、能量集中度、目标与红外遥感器孔径之间的传输效率有关;遥感器系统噪声与光子噪声(景物辐射和遥感器本体背景辐射共同到达焦平面处的光子的波动)、探测器组件噪声(探测器读出噪声、暗电流噪声)、电路噪声有关。
由于探测距离远,目标辐射通常又较弱,研制过程中准确评价遥感器对点目标的探测信噪比至关重要。目前国外已成功研制了MSX、IRAS、WISE等多台天文探测红外遥感器,采用真空低温环境下的信噪比测试,但其测试误差没有系统分析[2-5];国内传统方法按照照度等效原理在实验室环境下对点目标探测系统进行测试,仅考虑目标背景辐射照度差的等效性,未真实模拟点目标和探测背景的辐射特性,且未考虑模拟器冷光阑板厚度、目标相位等对测试的影响,测试结果存在较大误差[6]。文中基于某小行星红外遥感器原理样机点目标探测信噪比的测试需求,设计研制了一套探测信噪比测试系统,测试系统采用高精度、高稳定的红外目标背景模拟器配合平行光管模拟远距离点目标成像,将仿真优化与实践经验相结合,通过仿真计算去除模拟器冷光阑盘厚度、目标相位、平行光管等的影响,有效降低了遥感器真空低温下的测量不确定度。
-
遥感器的探测信噪比可由下式计算:
$$ {{SNR}} = \frac{{{{{N}}_{{\text{signal}}}}}}{{{{{N}}_{{\text{noise}}}}}} $$ (1) 式中:Nsignal为接收到的目标信号的光子数;Nnoise为各种噪声的等效光子数。
遥感器的噪声Nnoise主要由光子噪声Nphoton、探测器读出噪声Nreadout、暗电流噪声Ndark、电路噪声Nelec组成,即
$$ N_{\text {noise }}=\sqrt{N_{\text {photon }}^{2}+N_{\text {readout }}^{2}+N_{\text {dark }}^{2}+N_{\text {elec }}^{2}} $$ (2) 其中,光子噪声Nphoton是到达探测器处的光子数随机起伏,光生电子也随机起伏,从而产生的噪声。注入到探测器的辐射功率越大,产生的光子噪声也就越大[7]。
空间红外遥感器点目标探测信噪比测试在真空罐内采用平行光管模拟在轨远距离成像过程,通过平行光管像面辐射的调整来模拟目标和背景环境,通过对遥感器成像结果分析来评价系统像质水平。
-
红外目标探测信噪比测试系统由红外目标背景模拟器、低温平行光管、真空低温罐、制冷系统以及图像采集设备组成。红外目标背景模拟器由冷光阑、真空低温面源黑体、三维电移台三部分组成,冷光阑上布有微孔,其背后放置真空低温面源黑体,面源黑体的辐射透过微孔,由平行光管准直后进入待测红外遥感器,用于模拟点源目标和探测背景。冷光阑及真空低温面源黑体整体固定在三维电移台上,由电移台机构带动实现X、Y、Z轴三轴运动,实现目标相位调整。
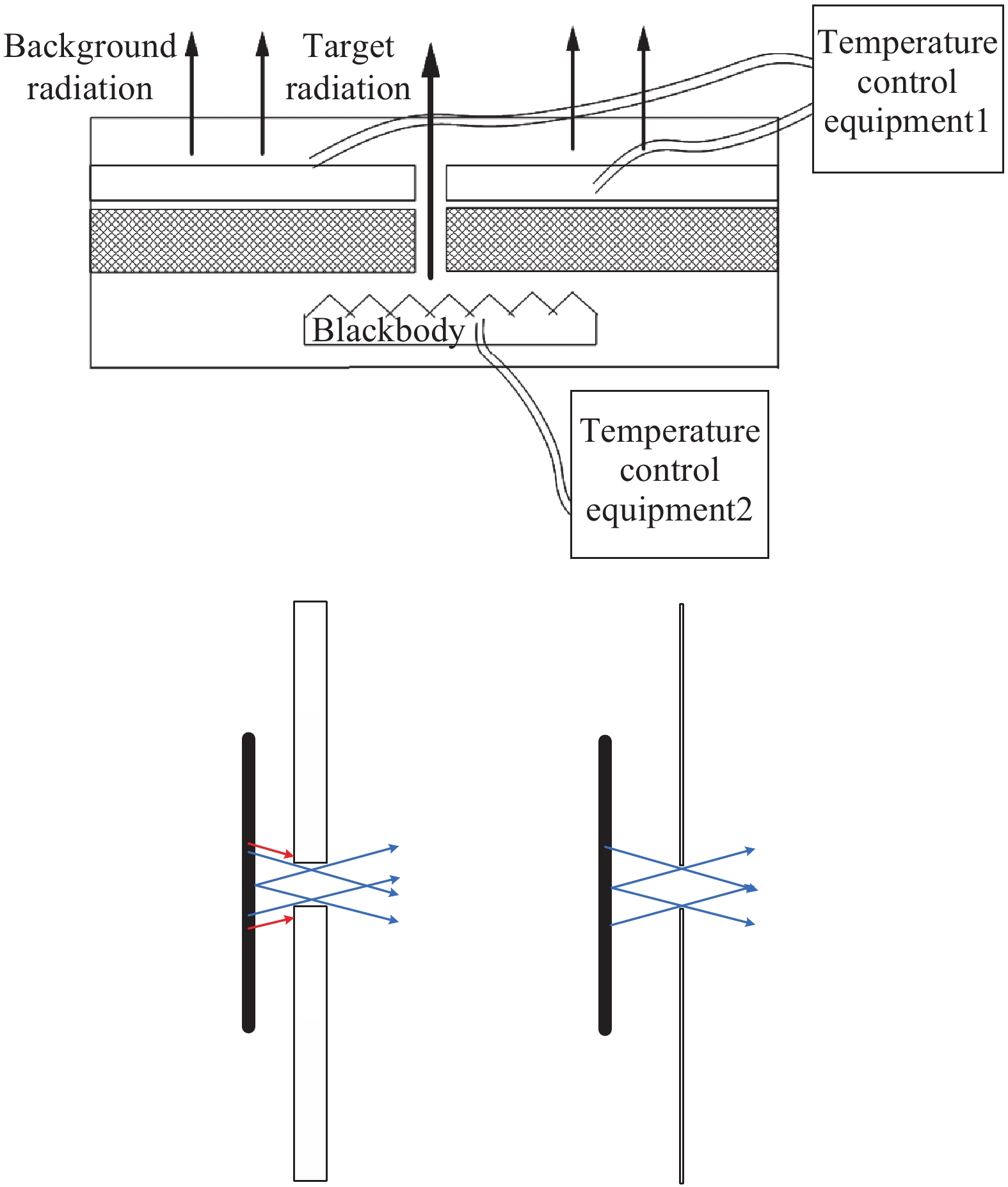
测试布局如图1所示,将红外遥感器与平行光管光路对准,平行光管将红外目标背景模拟器辐射信号准直,红外遥感器接收目标及背景辐射并成像,利用遥感器配套的处理设备实时采集图像数据,输出数字图像序列,并对数字图像进行处理,计算图像信噪比。

图 1 测试布局及原理框图
Figure 1. Testing layout & schematic diagram
测试时遥感器接收到目标信号的光子数Nsignal可由公式(3)计算。
$$ {{{N}}_{{\text{signal}}}} = \left( {{{{L}}_{{\text{BB}}}}{{ - }}{{{L}}_{\text{P}}}} \right) \cdot {\tau _{\text{a}}} \cdot {\tau _{\text{c}}} \cdot \frac{{{{{A}}_{{\text{optics}}}}}}{{{{{f}}_{{\text{collimator}}}}}} \cdot {{{A}}_{{\text{ph}}}} \cdot \frac{\lambda }{{{{h}} \cdot {{c}}}} $$ (3) 式中:LBB为黑体在探测谱段内的辐亮度;LP为冷光阑背景辐射面在探测谱段内的辐亮度;τa为测试条件下工作谱段内的大气透过率,真空环境下其值为1;τc 为平行光管的透过率;Aoptics为遥感器入瞳面积;Aph为冷光阑上的微孔面积;fcollimator为平行光管焦距;
$ \lambda $ 为探测谱段中心波长;h为普朗克常数;c为光速。 -
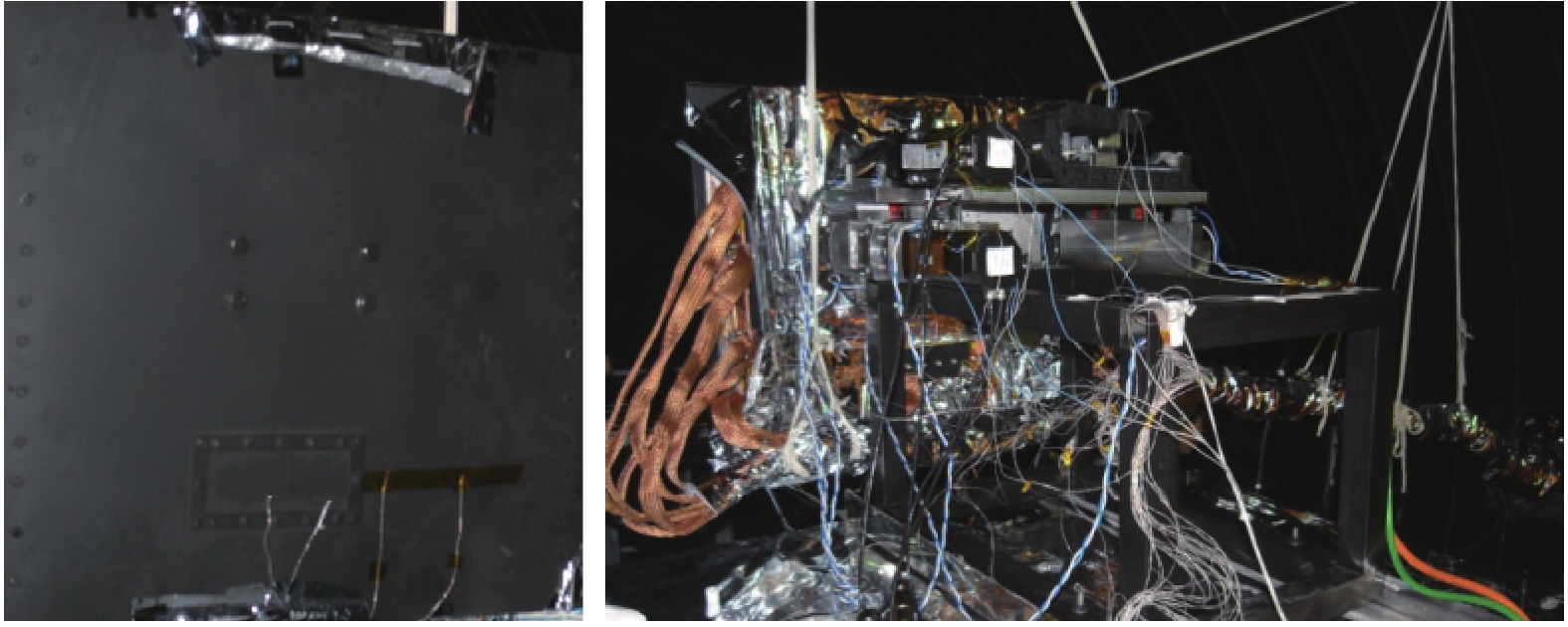
红外目标探测信噪比测试试验设备(可用于Φ280 mm口径以下遥感器测试的测试系统设备)主要参数如表1所示。红外目标背景模拟器如图2所示。
表 1 红外目标探测信噪比测试系统主要参数
Table 1. Parameters of the SNR testing system
Technical parameter Value Infrared target background simulator Cold diaphragm Emissivity >0.97 Effective emission area 100 mm×100 mm Effective diameter of transmitting hole 10-100 μm
(Optional)Thickness of cold diaphragm 0.5 mm Working temperature 230-270 K
(Adjustable)Blackbody Emissivity >0.99 Working temperature 270-760 K
(Adjustable)3D electric moving machine Motion stroke ≥20 mm Control accuracy 10 μm Cryogenic collimator Focal length 1200 mm Primary mirror aperture 300 mm Working temperature ≤200 K Vacuum cryogenic tank Size Φ4.4 m×6 m Temperature ≤100 K 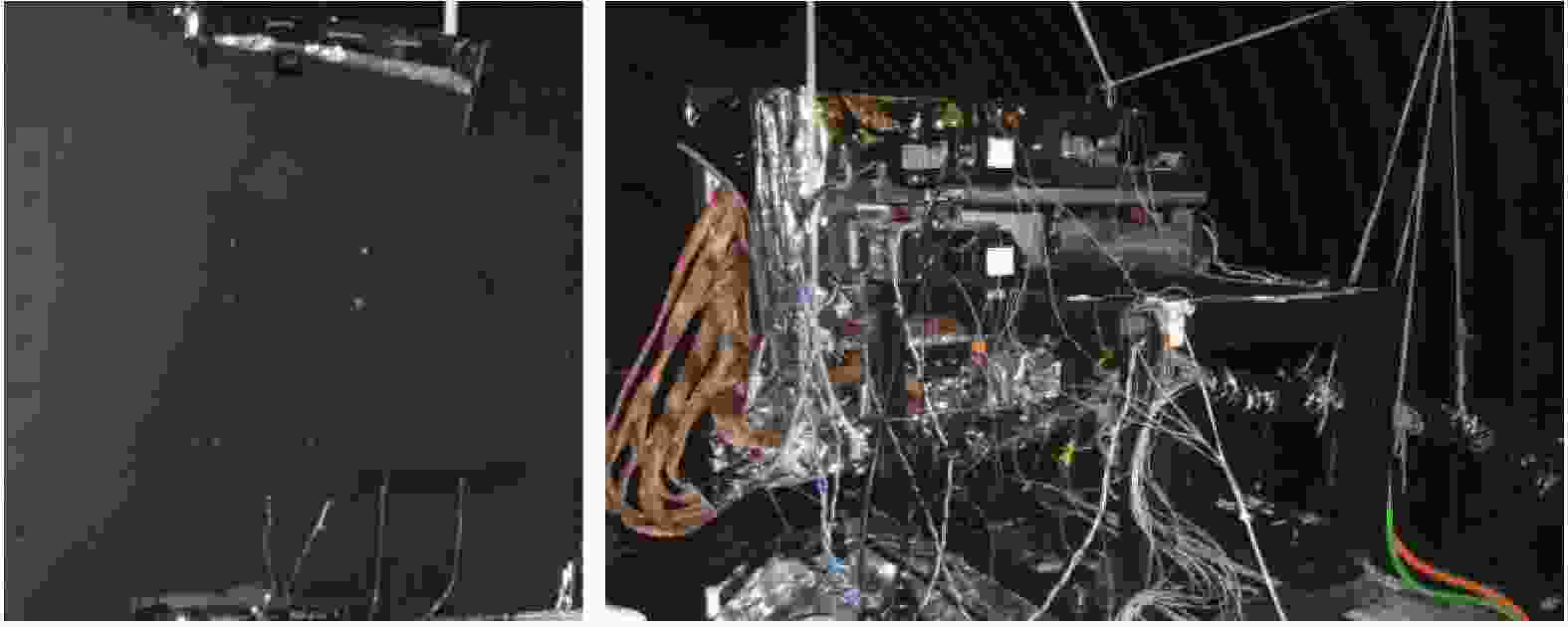
图 2 红外目标背景模拟器实物图
Figure 2. The infrared target background simulator
测试时应合理设置黑体温度、冷光阑温度、星点孔尺寸,模拟遥感器镜头接收到的目标背景辐射与探测背景辐射,根据冷光阑温度和发射率测试结果,同时考虑平行光管焦距、光学效率、测试环境大气透过率,利用普朗克定律计算其在探测谱段内产生的辐亮度,从而反推得到测试黑体温度。微孔面积应小于探测器像元在平行光管焦面处对应的面积,满足辐射孔径对平行光管张角小于红外遥感器的瞬时视场以模拟点目标,同时应避免较严重的衍射现象出现。
-
(1)冷光阑的温度传导均匀性和稳定性
需保证冷光阑与真空低温面源黑体、三维电移台、待测红外遥感器的隔热、控温。为了保证杂光抑制,冷光阑板需做到1 m×1 m,小于0.5 mm的薄板很难实现大面积温度传导均匀性。因此,冷光阑设计为一块2 mm厚的带有方孔铝板及一块安装在方孔上带有星点孔的0.5 mm的小板的二合一结构,两板通过铜条和螺栓进行镶嵌固定;冷光阑正对平行光管的一面作阳极氧化发黑处理,背部采用多层隔热材料包覆减少漏热[8-9]。
在导热索与冷光阑的连接部位安装电加热器进行热量补偿,并采用可编程PID控制器补偿控温模式进行闭环控制,从而提高冷光阑控温精度,减少温控系统的滞后性;冷光阑与电移台之间使用高强度玻璃钢绝热材料连接,减少电移台与冷光阑间传导漏热。
(2)黑体控温精度、温度稳定性
黑体控温精度、温度稳定性影响测量不确定度。由于腔式黑体的尺寸和质量大,难以安装在电移台,选择便携度好的面源黑体作为辐射源,将面源黑体表面制作成V型槽或蜂窝状等复杂表面,可提高发射率和辐射性能,可通过加装辐射罩等措施提高面源黑体温度稳定性和均匀性。
(3)冷光阑星点孔加工边缘锐度
由于机械加工的尺寸也无法保证微米级,采用飞秒激光微孔工艺加工冷光阑微孔,并用专业的微孔测量仪器进行检验,确保微孔的边缘锐度。
-
(1)低温平行光管像质影响剔除
低温平行光管的像质主要以峰-谷波前误差PV值、波前均方根误差RMS值、点扩散函数PST等为代表来表征。为了精确测量,首先采用自准直法测得低温平行光管的波前信息,之后在遥感器的光学系统装调完毕,使用干涉仪获取平行光管和遥感器光学系统的出射波前信息,综合分析波前矢高差异,剔除平行光管波前影响,从而得到遥感器光学系统真实的出射波前信息[10-11]。
(2)冷光阑板厚度对目标能量模拟影响剔除
朗伯光源(面源黑体)经过具有一定厚度冷光阑板到达星点孔外端的能量与板的厚度有关。面源黑体与冷光阑的位置关系如图3所示,假定冷光阑上的星点孔尺寸Ф50 μm、星点孔周边的冷光阑板厚度为0.5 mm,经Tracepro仿真,理论上不考虑厚度的等效目标强度与厚度0.3 mm时仿真的实际等效目标强度相差5.3%。因此,设计黑体温度时预留5.3%由厚度带来的辐射强度衰减。
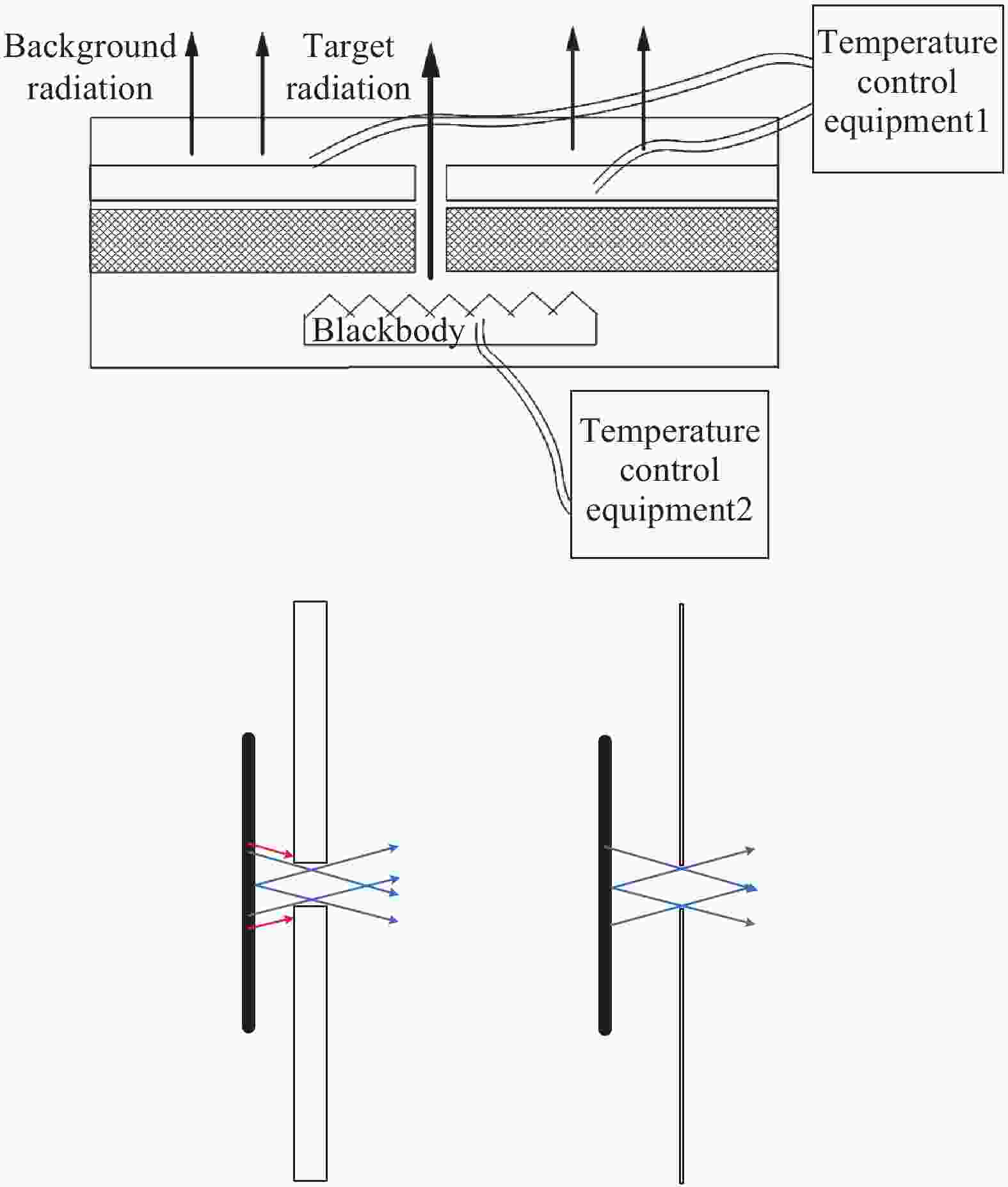
图 3 面源黑体与冷光阑的位置关系图
Figure 3. Position diagram of the blackbody and the cold diaphragm
-
测量不确定度是测量值与一级标准之间的一致程度,是测试系统基本误差(包括随机误差和系统误差)与满量程输出的百分比,用于定量表示测量结果的可靠程度。不确定度越小,所述结果与被测量的真值越接近,其使用价值越高。以信噪比测量不确定度提升为目标,用FTA (故障树)分析方法将影响测量不确定度的因素逐级分解到最基本的底事件,将底事件对测量不确定度的影响程度和原因进行深入分析,确定针对性的改进措施,可有效降低测量不确定度。
(1)目标背景模拟器辐射发射不确定度
冷光阑及真空低温面源黑体的控温精度和温度稳定性、光谱发射率测量不确定度会影响其模拟的目标和背景的辐射不确定度。在测试系统建设时应尽量提高黑体和冷光阑的控温精度、温度稳定性和表面发射率。冷光阑上加工的微孔的面积测量存在测试误差也会带来测试误差。
(2)平行光管反射率、焦距等测量误差
平行光管反射率不确定度和平行光管焦距测量不确定度会带来测试误差。
(3)成像结果中目标位置提取误差
空间点目标在遥感器的探测器靶面上成像为一个3×3~7×7像元的弥散斑,弥散斑的尺寸体现了遥感器系统能量集中度。实际测量时无法做到目标像元中心与点目标弥散斑完全重合,产生质心偏移,在设计和处理时,一方面对目标相位进行移动,采集多幅图像,用于跨像元因子分析;另一方面利用反卷积算法对目标相位进行修正[12],降低计算误差。
在测试过程中,针对各项影响因素进行相关指标重点控制,可有效降低测量不确定度。
-
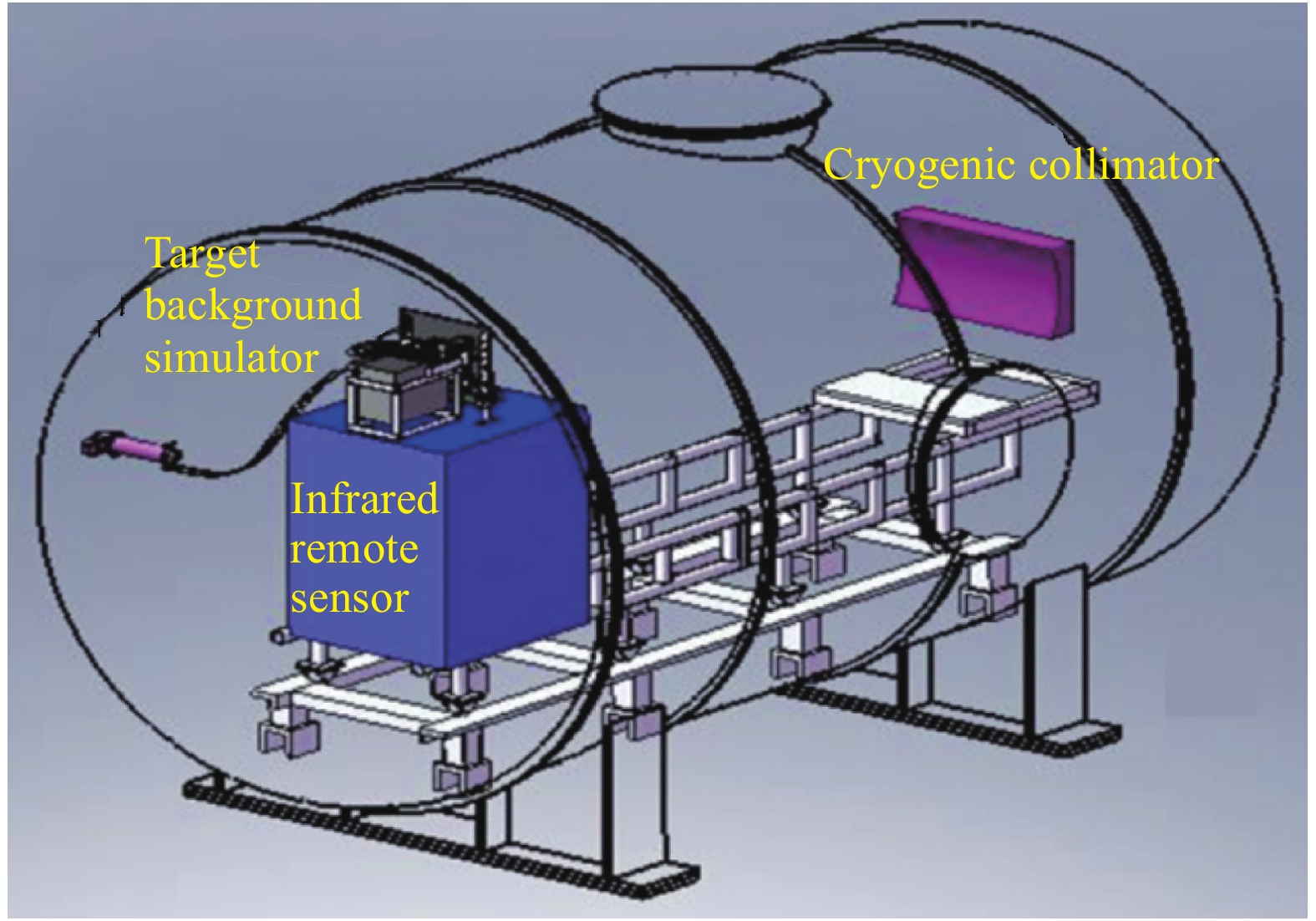
以某空间天文观测遥感器原理样机(主要参数见表2)测试为例,测试设备布局位置图如图4所示,测量不确定度要求控制在5%以内。
表 2 待测红外遥感器主要参数
Table 2. Main parameters of the infrared remote sensing system to be tested
Technical parameter Value Aperture of optical system 250 mm Focal length of optical system 425 mm Detection magnitude −20 stars Signal to noise ratio ≥5 Field of view 0.85°×0.68° Number of detector pixels 640×512 Spectral range 3-5 μm 红外星等的定义与可见光波段星等一致[13],星等的计算公式如下:
$$ m-m_{{\rm{ref}}}=-2.5\left(\log _{10} f-\log _{10} f_{{\rm{ref}}}\right) $$ (4) 式中:m为所求星的星等;mref为参考星的星等;f为所求星的辐射度;fref为参考星的辐射度,即在不同波长范围内零星等的绝对通量数据。以织女星的辐射度作为fref进行分析。经计算得到,在3~5 μm,0等星的绝对通量为4.98×10−15 W·cm−2·μm−1,−20等星的绝对通量为目标辐射通量为4.98×10−7 W·cm−2·μm−1。

图 4 探测信噪比测试设备布局位置图
Figure 4. Diagram of detecting SNR test equipments layout
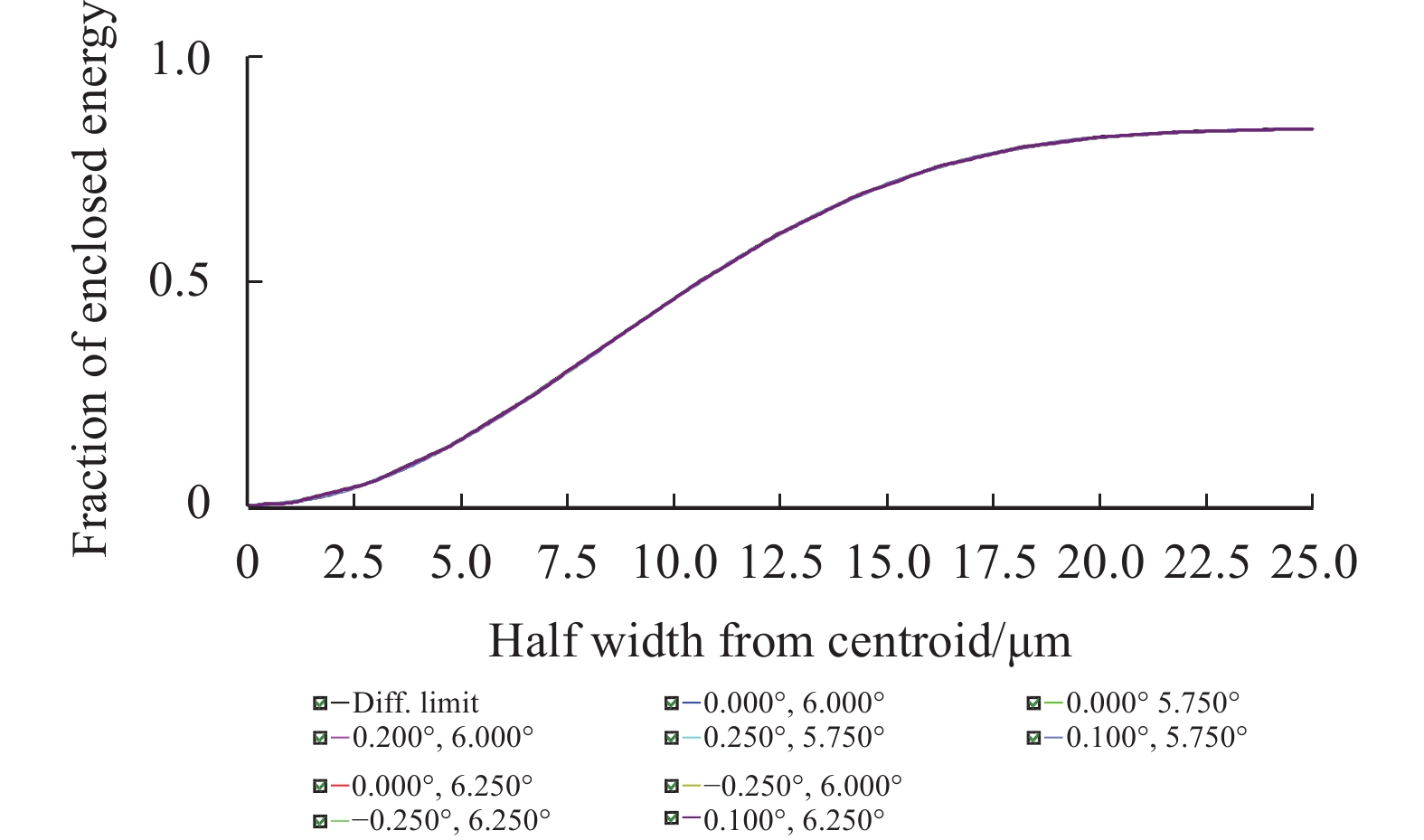
测试用平行光管参数如表3所示,平行光管光路图如图5所示,其MTF曲线如图6所示,其能量集中度如图7所示。
表 3 平行光管主要参数
Table 3. Main parameters of the collimator
Technical parameter Value Aperture of optical system Φ300 mm Focal length of optical system 1200 mm Spectral range 0.4-16 μm Field of view 2ω≥0.15° Central field wave aberration RMS≤λ/30, λ=632.8 nm 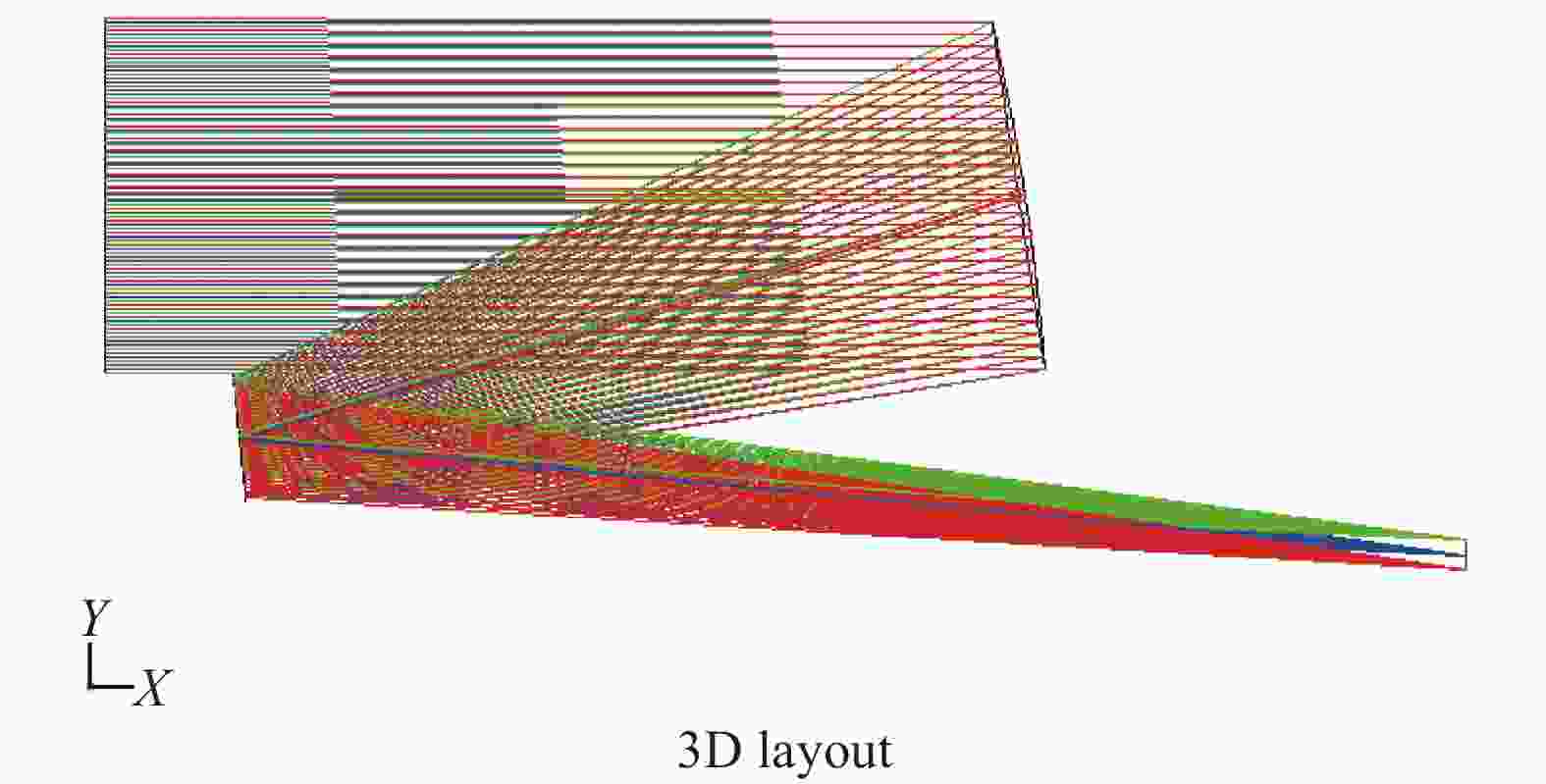
图 5 某测试用平行光管光路图
Figure 5. Light path diagram of collimator for test
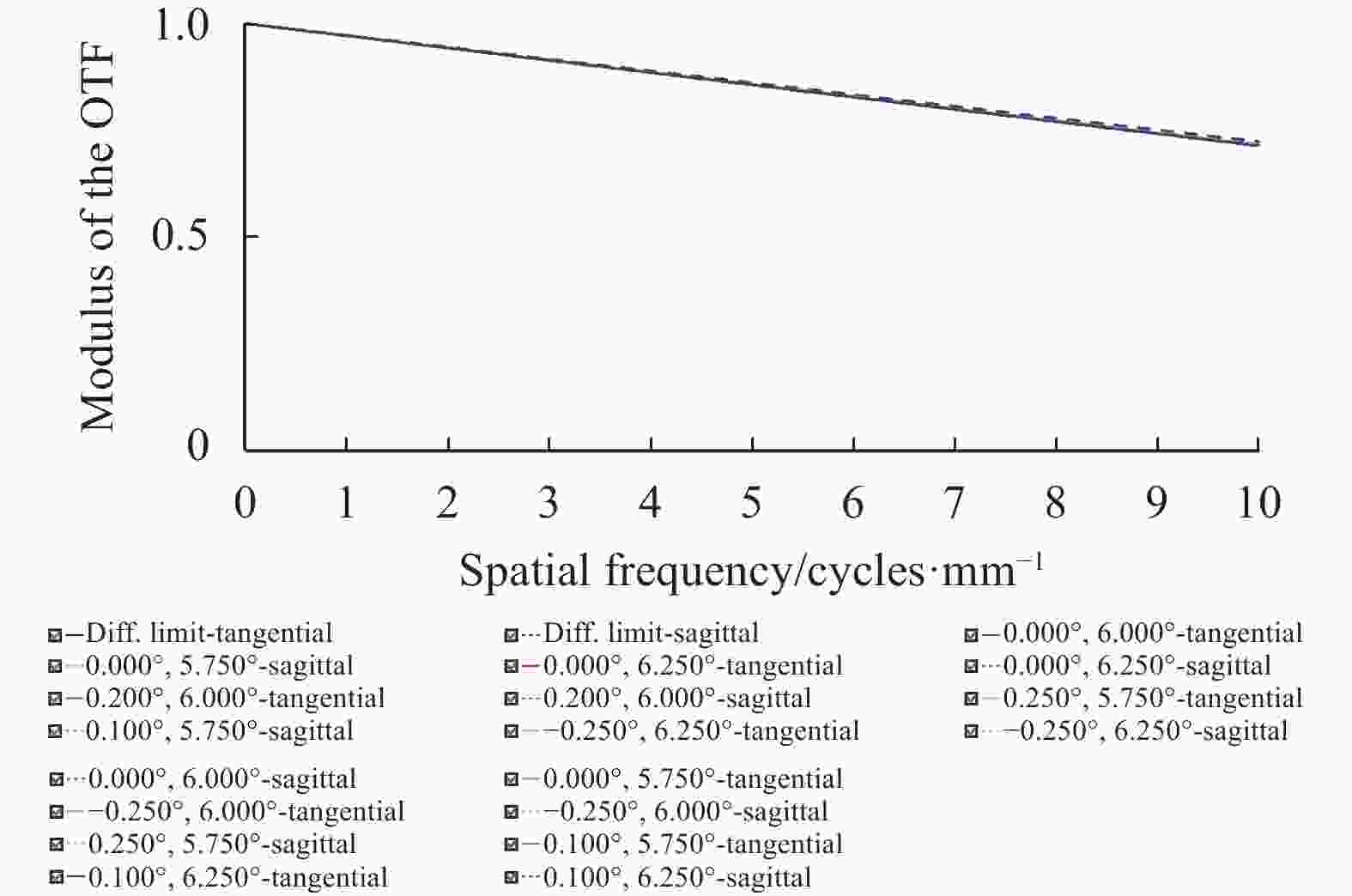
图 6 某测试用平行光管的MTF曲线
Figure 6. MTF curve of collimator for test
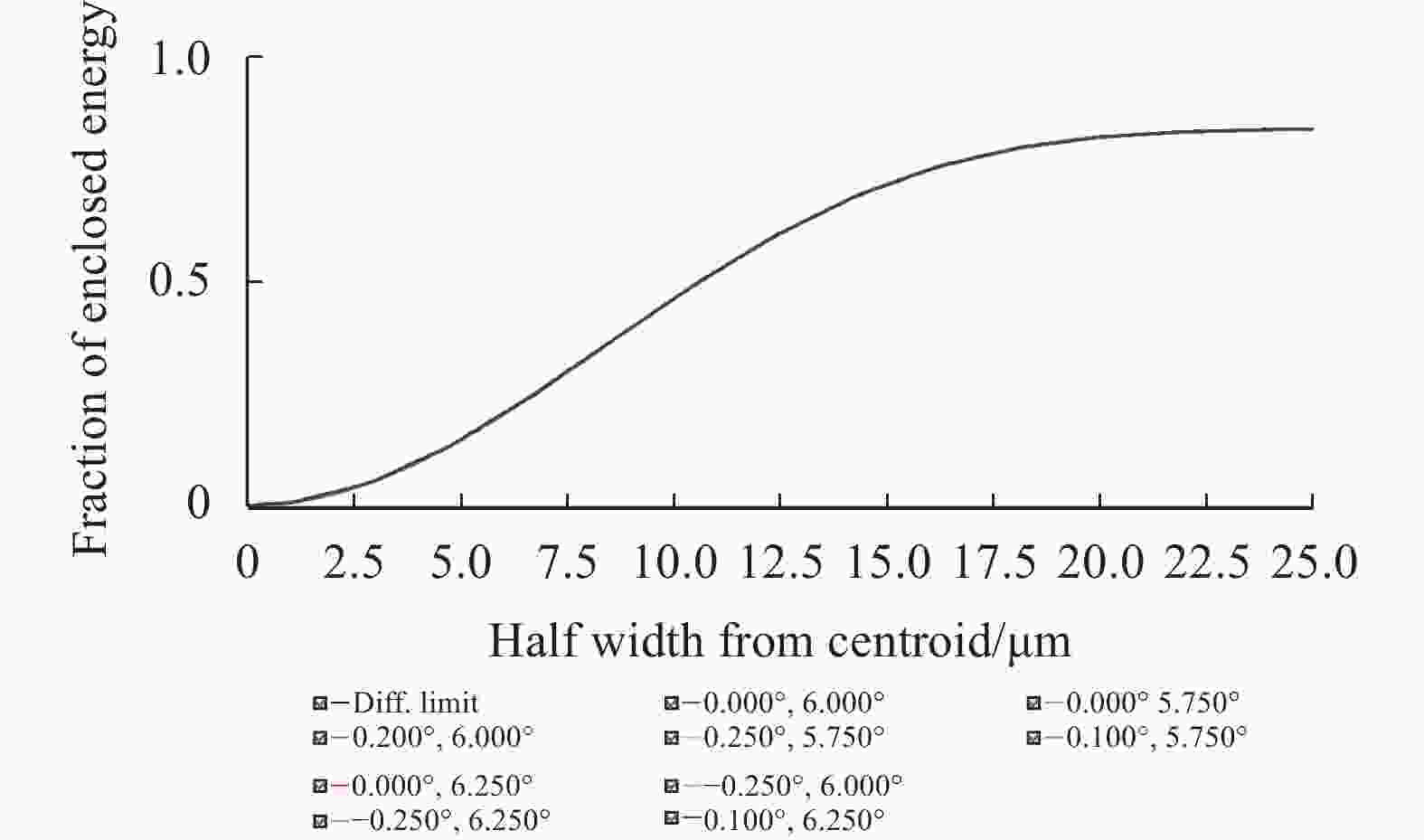
图 7 某测试用平行光管的能量集中度曲线
Figure 7. Energy concentration curve of collimator for test
遥感器探测器像元尺寸为25 μm×25 μm,平行光管焦距为遥感器焦距的2.8倍。为了模拟点源,设计星点孔尺寸≤1/4像元,则微孔的尺寸为Ф50 μm。根据探测星等的辐射度计算得到黑体温度为204.3 K,预留5.3%冷光阑板厚度衰减量、5%平行光管效率衰减量,则黑体温度应设置为205.7 K,为模拟深空背景,考虑到遥感器的背景限,冷板温度模拟≤40 K。
综合考虑冷光阑板厚度影响、平行光管影响完成了测试,对点目标成像结果如图8所示。如表4所示,系统研制过程中,对黑体光谱发射率测量不确定度为2%,发射率测量不确定度为2%;平行光管反射率综合测量不确定度0.5%,平行光管焦距测量不确定度为0.2%;冷光阑上加工的微孔的面积测量误差0.5%、厚度测量误差0.3%;目标所在相位的影响偏差1.5%;试过程中温度测量数据黑体的工作温度的稳定度为±0.05 K,冷光阑板温度不稳定度为±2 K,同时,测试系统噪声影响0.5%。综合以上分析得到测量不确定度为2.78%。
表 4 测量不确定度分析
Table 4. Measurement uncertainty analysis
Variable Factors affecting measurement uncertainty Relative uncertainty σ1 Blackbody emissivity of low
temperature area source2.00% σ2 Cold aperture emissivity 0.53% σ3 Low temperature non-point source
blackbody temperature0.75% σ4 Cold diaphragm temperature 0.20% σ5 Collimator reflectivity 0.10% σ6 Effect of collimator stray light 0.20% σ7 Uncertainty of aperture area measurement 0.50% σ8 Uncertainty of diaphragm thickness measurement 0.30% σ9 Algorithm error caused by target phase 1.50% σ10 Test system noise error 0.50% Total uncertainty 2.78% 
图 8 点目标信噪比测试目标点成像图
Figure 8. Output image of point target SNR test
-
文中基于点目标探测信噪比测试原理设计研制了探测信噪比测试系统,采用高精度、高稳定的红外目标背景模拟器配合平行光管模拟远距离点目标成像,实现了遥感器真空低温下的高精度测试。通过仿真优化设计的方式,最大程度地提高了冷光阑的降温效果和温度均匀性;将仿真优化与实践经验相结合,通过仿真计算去除模拟器冷光阑板厚度、目标相位、平行光管等的影响,有效降低系统测量不确定度。文中的仿真分析方法和验证情况对于红外遥感器点目标探测信噪比检测试验具有参考意义。
Study of testing the detecting SNR of point target imaging infrared remote sensing systems
-
摘要: 针对遥感器真空低温测试需求,设计并搭建了一套能够在低温真空环境中稳定工作的红外目标背景模拟器,模拟器主要由冷光阑、真空低温面源黑体、三维电移台三部分组成,冷光阑模拟探测背景,冷光阑上分布微孔用于模拟探测点目标。通过有效控制目标模拟器与背景模拟器间的隔热、控温以及背景模拟器与待测遥感器之间的隔热,实现稳定测试。另外,将仿真优化与实践经验相结合,通过仿真计算去除模拟器冷光阑板厚度、目标相位、平行光管等的影响,有效降低系统测量不确定度。文中的仿真分析方法和验证情况对于红外遥感器点目标探测信噪比检测试验具有参考意义。Abstract: According to the vacuum and cryogenic test requirements of remote sensors, a set of infrared target background simulators that could work stably in low temperature and vacuum environments was designed and built. The simulator is mainly composed of cold diaphragm, vacuum and low temperature surface source blackbody and three-dimensional electric moving table. The cold diaphragm simulates the detection background, and the micro holes distributed on the cold diaphragm are used to simulate the detection point targets. By effectively controlling the thermal insulation and temperature control between the target simulator and the background simulator and the thermal insulation between the background simulator and the remote sensor to be tested, the stable test is realized. In addition, combining simulation optimization with practical experience, the influence of the thickness of the cold stop plate, the target phase and the collimator of the simulator is removed through simulation calculation, which effectively reduces the measurement uncertainty of the system. The simulation analysis method and the verification results in this paper have reference significance for the detection experiment of signal-to-noise ratio of infrared remote sensor point target detection.
-
表 1 红外目标探测信噪比测试系统主要参数
Table 1. Parameters of the SNR testing system
Technical parameter Value Infrared target background simulator Cold diaphragm Emissivity >0.97 Effective emission area 100 mm×100 mm Effective diameter of transmitting hole 10-100 μm
(Optional)Thickness of cold diaphragm 0.5 mm Working temperature 230-270 K
(Adjustable)Blackbody Emissivity >0.99 Working temperature 270-760 K
(Adjustable)3D electric moving machine Motion stroke ≥20 mm Control accuracy 10 μm Cryogenic collimator Focal length 1200 mm Primary mirror aperture 300 mm Working temperature ≤200 K Vacuum cryogenic tank Size Φ4.4 m×6 m Temperature ≤100 K  下载: 导出CSV
下载: 导出CSV
表 2 待测红外遥感器主要参数
Table 2. Main parameters of the infrared remote sensing system to be tested
Technical parameter Value Aperture of optical system 250 mm Focal length of optical system 425 mm Detection magnitude −20 stars Signal to noise ratio ≥5 Field of view 0.85°×0.68° Number of detector pixels 640×512 Spectral range 3-5 μm
下载: 导出CSV
表 3 平行光管主要参数
Table 3. Main parameters of the collimator
Technical parameter Value Aperture of optical system Φ300 mm Focal length of optical system 1200 mm Spectral range 0.4-16 μm Field of view 2ω≥0.15° Central field wave aberration RMS≤λ/30, λ=632.8 nm
下载: 导出CSV
表 4 测量不确定度分析
Table 4. Measurement uncertainty analysis
Variable Factors affecting measurement uncertainty Relative uncertainty σ1 Blackbody emissivity of low
temperature area source2.00% σ2 Cold aperture emissivity 0.53% σ3 Low temperature non-point source
blackbody temperature0.75% σ4 Cold diaphragm temperature 0.20% σ5 Collimator reflectivity 0.10% σ6 Effect of collimator stray light 0.20% σ7 Uncertainty of aperture area measurement 0.50% σ8 Uncertainty of diaphragm thickness measurement 0.30% σ9 Algorithm error caused by target phase 1.50% σ10 Test system noise error 0.50% Total uncertainty 2.78%
下载: 导出CSV
-
[1] ANSYS Inc. ANSYS Modeling and Meshing Guide [M]. 12th ed. Canonsburg: SAS IP Inc, 2001. [2] Pearson D, Hardy J, Lysek M, et al. Verification facility for cryogenic optics, mechanisms and structures for the SIRTF telescope [C]//Proceedings of SPIE, 2000, 4131: 250-254. [3] Hewison T J, Muller J. Ice contamination of Meteosat /SEVIRI implied by intercalibration against Metop/IASI [J]. IEEE Transactions on Geoscience and Remote Sensing, 2013, 51(3): 1182-1186. doi: 10.1109/TGRS.2012.2236335 [4] Sergeev P A, Gogolev Y A, Zvonkova V V, et al. Collimator equipment of the large test facility vertical for testing space telescopes [C]//Proceedings of SPIE, 1995, 2475: 348-358. [5] Bartschi B Y, Morse D E, Woolston T L. The spatial infrared imaging telescope III [J]. Johns Hopkins APL Tech, 1996, 17(2): 215-225. [6] Mu Da, Li Quanyong, Dong Jianing. Analysis on ground-based infrared detection system detecting the infrared magnitude of space targets [J]. Infrared and Laser Engineering, 2011, 40(9): 1609-1613. (in Chinese) [7] Yu Lili, Zhu Yonghong, Zhu Lianzhang, et al. Numerical simulation of temperature for Al2O3 ceramics during electrical discharge machining [J]. Journal of System Simulation, 2007, 19(24): 5648-5650. (in Chinese) [8] Feng Xiaoyu, Du Jianxiang, Hou Nao, et al. A focal length testing method with high accuracy for the optical system [J]. Spacecraft Recovery & Remote Sensing, 2020, 41(4): 101-110. (in Chinese) [9] Xu Bing, Ma Long, Li Xiaoman. Development of the low-temperature optical-infrared background simulator [J]. Spacecraft Environment Engineering, 2012, 29(4): 430-436. (in Chinese) [10] Collaudin B, Rando N. Cryogenics in space: A review of the missions and the technologies [J]. Cryogenics, 2000, 40(12): 797-819. doi: 10.1016/S0011-2275(01)00035-2 [11] Kim S, Yang H, Lee Y, et al. Merit function regression method for efficient alignment control of two-mirror optical systems [J]. Optics Express, 2007, 15(8): 5059-5069. doi: 10.1364/OE.15.005059 [12] Yang Tianyuan, Zhou Feng, Xing Mailing. A method forcalculating the energy concentration degree of point target detection system [J]. Spacecraft Recovery& Remote Sensing, 2017, 38(2): 41-47. (in Chinese) [13] Huang Chen, Wang Jianjun, Gao Xin, et al. Application of infrared star catalog in ground-based infrared radiation measurement system [J]. Infrared and Laser Engineering, 2013, 42(11): 151-159. (in Chinese) -

 点击查看大图
点击查看大图

图(8) / 表(4)
计量
- 文章访问数: 151
- HTML全文浏览量: 30
- PDF下载量: 74
- 被引次数: 0






