





-
红外成像技术由于具有穿透力强、环境适应性强和成像质量高等特点,在车辆辅助驾驶方面得到日益广泛的应用[1-2]。在民用领域,车载红外辅助驾驶系统能够大幅度提高汽车夜间行驶的效率和安全性,在凯迪拉克、通用、宝马、红旗等公司旗下的多种车型上得以成功应用;在军事领域,借助车载红外辅助驾驶系统,战场上能够实现夜间和恶劣天气条件下的快速隐蔽机动,支持军用车辆全天时、全天候作战,自2004年开始,美军、英军、德军等陆续研制了多种型号并大量装备于军事地面车辆。其中,辅助驾驶性能作为车载红外辅助驾驶系统的核心性能,不仅关系到人车安全,更决定着系统效能的生成,对其展开深入的研究具有重要意义。
近年来,国内外对车载红外辅助驾驶系统开展了广泛的研究,如燕山大学的刘秋锦[3]、电子科技大学的吴传福[4]、华南理工大学的边二涛[5]等对红外车载夜视系统进行了研究设计;Brehar R[6]、Hwang S[7]、王国华[8]等对车载红外行人检测算法进行了研究;Lu Yuesheng[9]、Michelle A G[10]等基于红外成像技术进行了夜间车载行人探测系统的设计和实验验证;沈振一[11]、范德营[12]等对车载红外视频图像的三维重建和彩色化进行了研究。但这些研究主要集中于系统设计、行人检测算法、视频图像处理等方面,对辅助驾驶性能的研究较少。
对于红外辅助驾驶系统、驾驶员、车辆和路况环境共同构成的动态系统而言,安全行车能力是辅助驾驶性能的关键指标,其核心体现于安全行车车速,受天气条件影响极大。为此,文中开展车载红外辅助驾驶性能研究,通过分析辅助驾驶安全制动过程及其影响因素,建立辅助驾驶行车视距模型,分析辅助驾驶最大安全车速与路况环境、红外探测性能之间的关系,在对行车视距模型进行修正的基础上,完成恶劣天气下探测距离和最大安全车速的模拟仿真,研究探索雾天、雨天对辅助驾驶性能的影响。
-
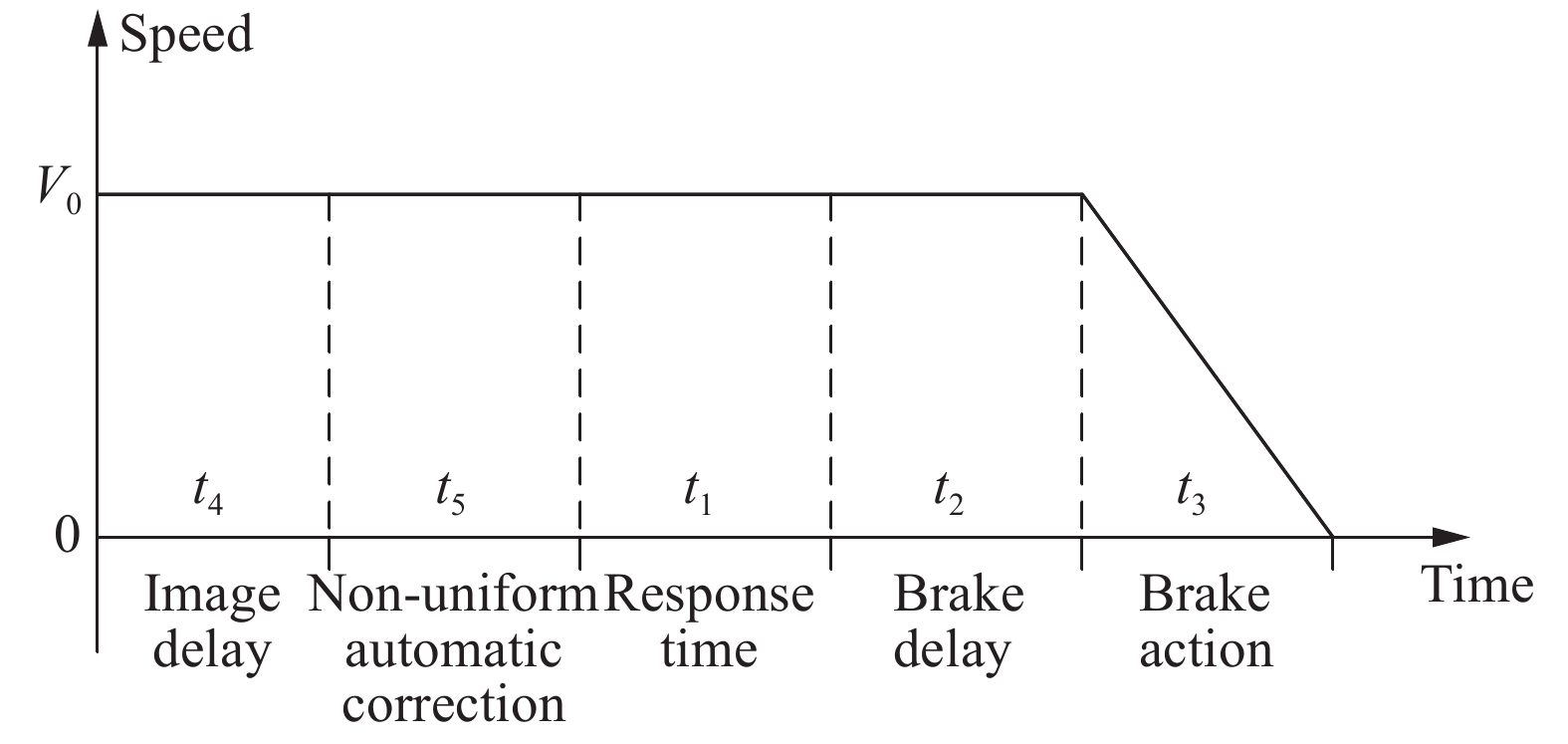
车载红外辅助驾驶系统的应用场景主要是夜间或恶劣天气环境,特别是应用于战场灯火管制时,人眼观察范围极其有限,安全风险指数高,辅助驾驶过程中需保持足够的行车视距,以确保前方遇到障碍物或突发情况时车辆能够迅速制动。行驶车辆的制动过程一般可分为人员反应、制动延时和制动器作用三个阶段,即:
式中:
$S$ 为制动距离;${S_1}$ 、${S_2}$ 和${S_3}$ 分别为人员反应、制动延时和制动器作用过程中车辆行驶的距离。车载红外辅助驾驶系统一般由摄像头和显示器组成,安装在车外的摄像头拍摄路况图像,传输至驾驶室内的显示器供驾驶员观察,在此过程中会存在视频图像的延迟。另外,由于红外成像系统存在着非均匀性的问题[13-14],每隔一定时间需进行一次非均匀校正,如果非均匀校正发生于车辆制动阶段,会延长制动过程。因此,车载红外辅助驾驶的整个制动过程如图1所示,可分为图像延迟、非均匀自动校正、人员反应、制动延时和制动器作用五个阶段。

Figure 1. Braking process of driving assistance
如果制动器作用前车速为
${V_0}$ ,制动器起作用后车辆减速为$a = {\varphi _s}g$ ,其中$g$ 表示重力加速度,${\varphi _s}$ 表示滑动附着系数。则车载红外辅助驾驶制动距离可表示为:式中:
${S_4}$ 、${S_5}$ 分别表示图像延迟和非均匀自动校正过程中车辆行驶的距离。假设车载红外辅助驾驶系统的探测距离为$R$ ,为保证行车安全,则有:式中:
$d$ 为车辆制动结束后与前方障碍物或人员、车辆等所需保持的安全距离。同时,车载红外辅助驾驶系统观察到前方路况信息,需满足红外探测系统实现目标探测的基本条件:(1)对于空间频率为f的目标,它与背景的实际等效温差在经过大气衰减到达红外探测系统时,不小于系统对应的最小可分辨温差MRTD;(2)观察目标对红外探测系统的张角应不小于观察等级所要求的最小视角。即:
式中:
$\Delta {T_{\rm e}}$ 为目标与背景的实际等效温差;${\tau _{\rm a}}(R)$ 为大气透过率;$H$ 为目标高度;${n_{\rm e}}$ 为观察等级要求的目标等效条带对数。车载红外辅助驾驶过程中,车载红外辅助驾驶系统与路面目标处于相向运动的状态,因此,在上述红外静态性能模型基础上,进一步引入动态性能模型,其中,被广为接受的红外动态性能模型是CNVEO模型。假设探测过程中车辆为匀速运动,在时段
$t$ 内的动态探测概率${p_2}$ 为:式中:
${p_1}$ 为静态探测概率;${T_{eye}}$ 为人眼的积分时间。结合动态探测过程,则车载红外辅助驾驶的安全行车视距模型可表示为:
-
从安全行车视距模型的建立过程可以看出,车载红外辅助驾驶系统的安全车速与路面条件和探测距离有直接关系,最大安全车速
${V_{\max }}$ 满足式中:滑动附着系数
${\varphi _{\rm s}}$ 与路面条件直接相关[15],常见路面土路和混凝土路的滑动附着系数如表1所示。Pavement type Dry concrete road Wet concrete road Dry dirt road Wet dirt road Muddy dirt road Sliding adhesion coefficient 0.75 0.35 0.65 0.20 0.15 Table 1. Sliding adhesion coefficient of common pavement type
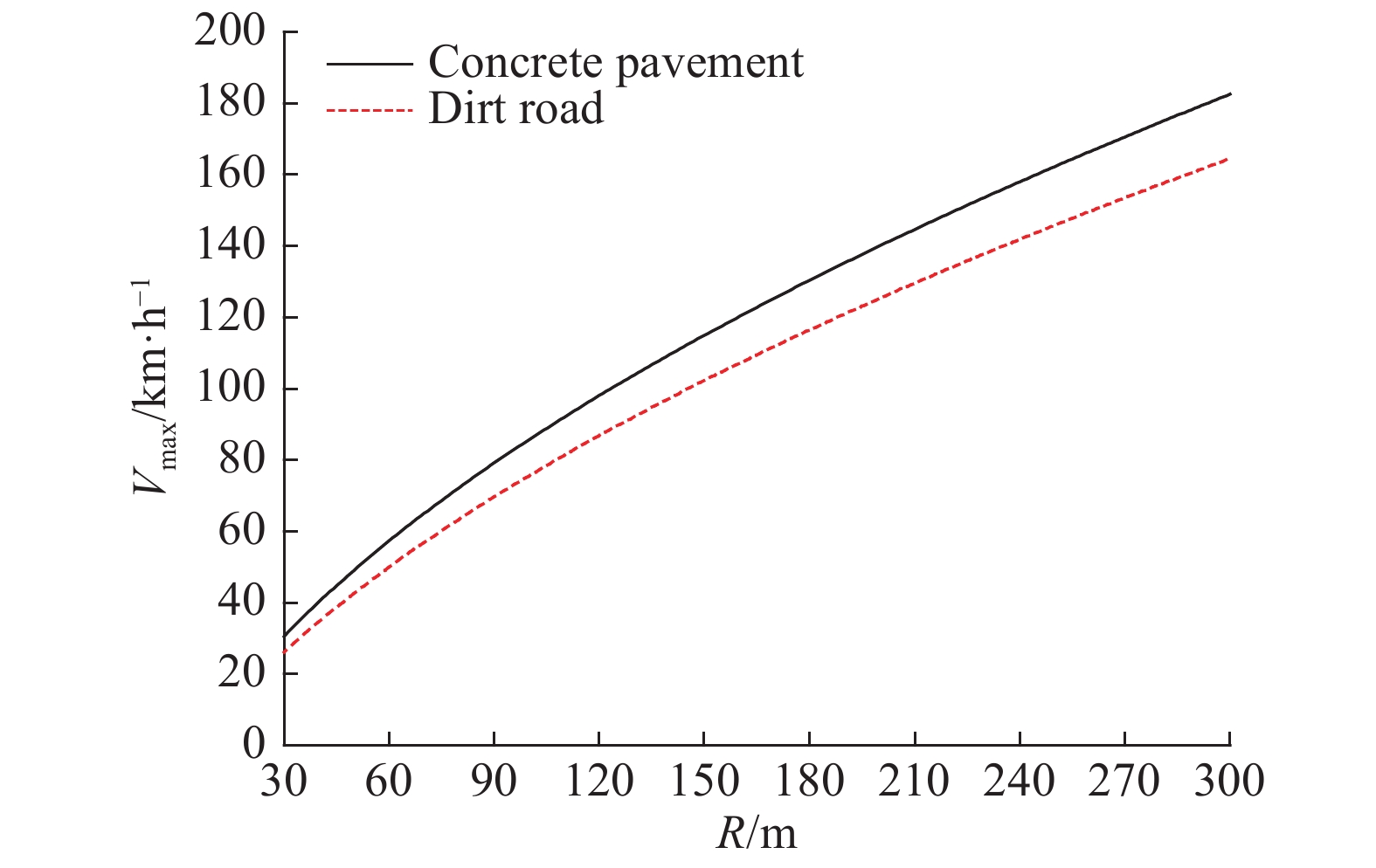
路况一定时,辅助驾驶的最大安全车速主要取决于动态探测概率和红外探测器的探测距离。干燥土路面和干燥混凝土路面条件下,取动态探测概率
${p_2} = 99\% $ ,探测距离对最大安全车速的影响如图2所示。可以明显看出二者的正相关关系,当探测距离分别大于190 m左右、160 m左右时,最大安全车速达到了120 km/h。
Figure 2. Relationship between maximum safety speed and detection distance
为了进一步分析环境条件对最大安全车速的影响,需对探测距离
$R$ 进行求解,求解之前首先对$MRTD(f)$ 进行修正。$MRTD(f)$ 的大小一般来自于实验室测试或理论计算,通过车载红外辅助驾驶系统实际观察目标时,由于不满足实验室标准条件和理论计算理想条件,可对一些因子进行修正。以噪声等效温差
$NETD$ 为基础,考虑热成像系统全部电路的带宽及人眼作用,$MRTD(f)$ 可表示为:式中:
$SN{R_{\rm DT}}$ 为阈值信噪比;$MT{F_{\rm S}}\left( f \right)$ 为热成像系统总的调制传递函数;$\alpha $ 、$\beta $ 分别为探测器横向和纵向的角分辨率;${\tau _{\rm d}}$ 为探测器的积分时间;${f_{\rm P}}$ 为帧频;$\Delta {f_{ n}}$ 为放大电路等效噪声带宽。实验室MRTD测试采用的是长宽比为7:1的四条带标准靶,辅助驾驶过程中路面目标的实际高宽比不一定满足理想条件,因此,需要进行目标形状的修正。目标形状修正因子为
${k_1} = \sqrt {7/\varepsilon } $ ,其中,$\varepsilon $ 表示目标等效高宽比,与实际高宽比${\varepsilon _0}$ 的关系可表示为:同时,实验室
$MRTD$ 测试采用的是恒定温度为${T_{\rm T}}$ 的黑体目标背景,辅助驾驶过程中需根据实际路面温度${T_{\rm m}}$ 进行修正,修正因子为${k_2} = {T_{\rm T}}/{T_{\rm m}}$ 。车载红外辅助驾驶系统对路面目标的静态探测概率
${p_1}$ 与阈值信噪比$SNR$ 有关,其关系为:阈值信噪比修正因子为
${k_3} = SNR/SN{R_{\rm DT}}$ 。修正后的
$MRTD(f)$ 可表示为:则有:
可以看出,最大安全车速
${V_{\max }}$ 的影响因素主要包括探测概率${p_1}$ 和${p_2}$ 、目标尺寸、目标与背景等效温差、大气透过率、目标高度、目标等效条带对数。辅助驾驶过程中,为确保行车安全,可取静态探测概率${p_1} = 100\% $ 。目前,车载红外辅助驾驶系统一般采用8~14 μm波段探测器,当探测距离为300 m时,通过LOWTRAN计算不同能见度下的大气透过率,结果如图3所示。可以看出,由于车载红外辅助驾驶系统为近距离探测,天气条件较好时能见度对大气透过率的影响不明显。

Figure 3. Atmospheric transmittance in 8-14 μm band
可见观察等级和目标一定时,良好天气下的最大安全车速主要与目标背景温差有关。图4为干燥土路面和干燥混凝土路面下,观察等级分别为发现和识别时,最大安全车速与目标背景温差的变化关系,仿真计算过程中基本参数值如表2所示。从图中可以看出,随着温差的增大最大安全车速也明显增大,且观察等级为发现时的最大安全车速远大于识别时。辅助驾驶过程中,为保证行车安全应以识别条件下的车速控制为主,当路况条件较好时可选择发现条件下的车速控制。

Figure 4. Relationship between maximum safety speed and temperature difference
SNRDT ${\tau _{\rm{d}}}$ Teye fP NETD H p1 p2 2.8 30 µs 0.1 s 50 Hz 40 20 cm 1 0.99 Table 2. Basic parameter value of simulation calculation
-
恶劣天气条件对车载红外辅助性能的影响,主要来自于两方面,一是容易造成路面的潮湿和积水,对行车制动性能造成严重影响;二是大气对红外辐射信号衰减严重,导致探测器探测距离的下降。恶劣天气下,大气对红外辐射的衰减主要由于大气吸收、大气散射和雾、雨等恶劣天气条件引起的衰减。三种衰减因素影响下的光谱透过率
$\tau (\lambda )$ 与衰减系数$\mu (\lambda )$ 均满足波盖尔-朗伯定律,即:式中:
${\varphi _e}(\lambda ,R)$ 为距离$R$ 处,目标背景辐射能量的光谱密度。吸收、散射和气象衰减共同影响下的大气光谱透过率即为三种大气透过率的乘积。由于车载红外辅助驾驶系统属于近距离探测,红外辐射信号传输路径相对较短,大气吸收和散射对辐射信号传输的影响相对较小,大气消光作用主要来自于恶劣天气条件引起的衰减,造成大气透过率的下降。对大气透过率的计算,目前,大多数研究主要借助于经验公式或专门的仿真软件。由于大气影响因素比较复杂,通过经验公式计算时容易产生较大的误差,因此,文中采用较为成熟的LOWTRAN大气仿真软件,对雾、雨天气条件下的大气透过率进行仿真计算。
-
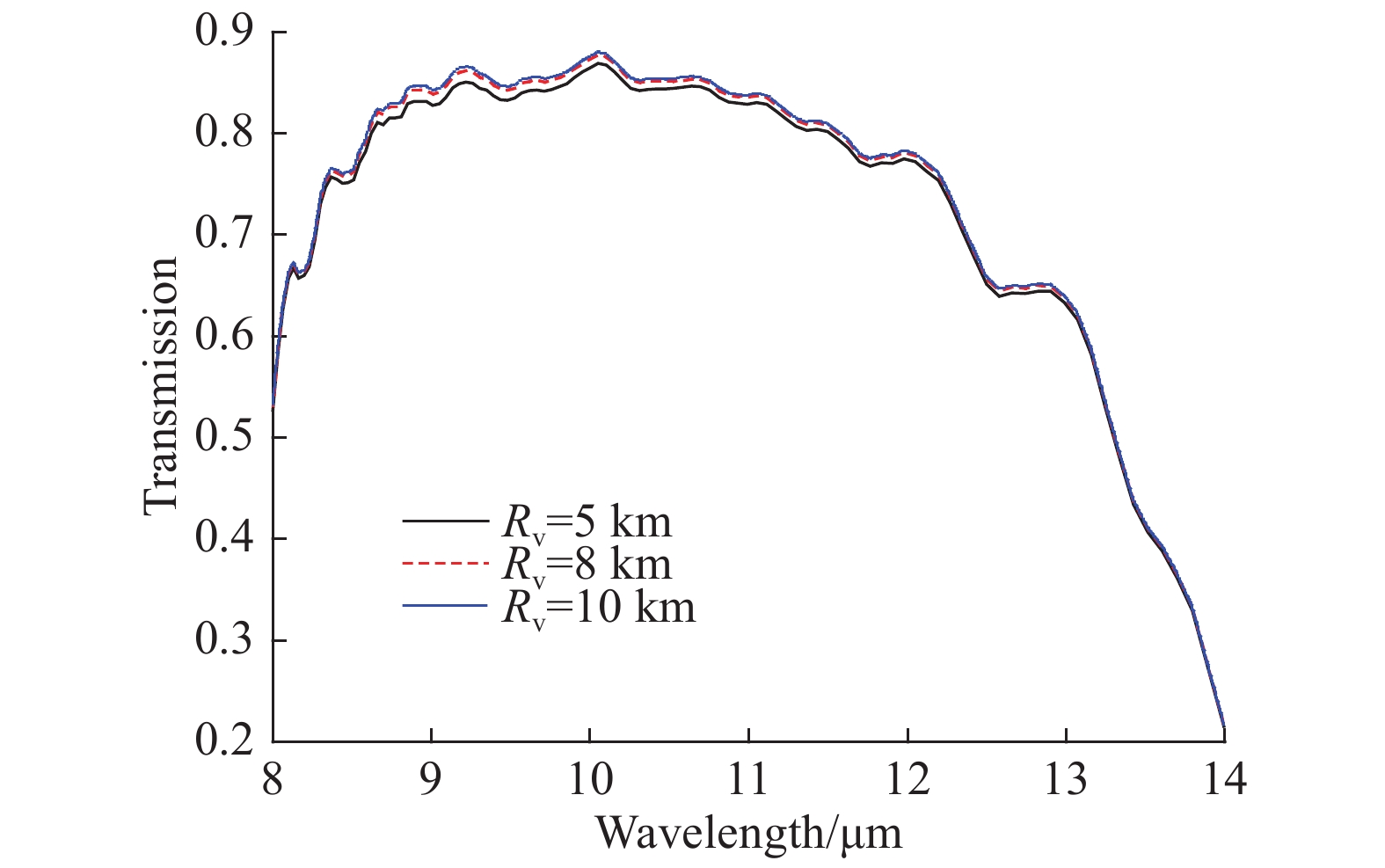
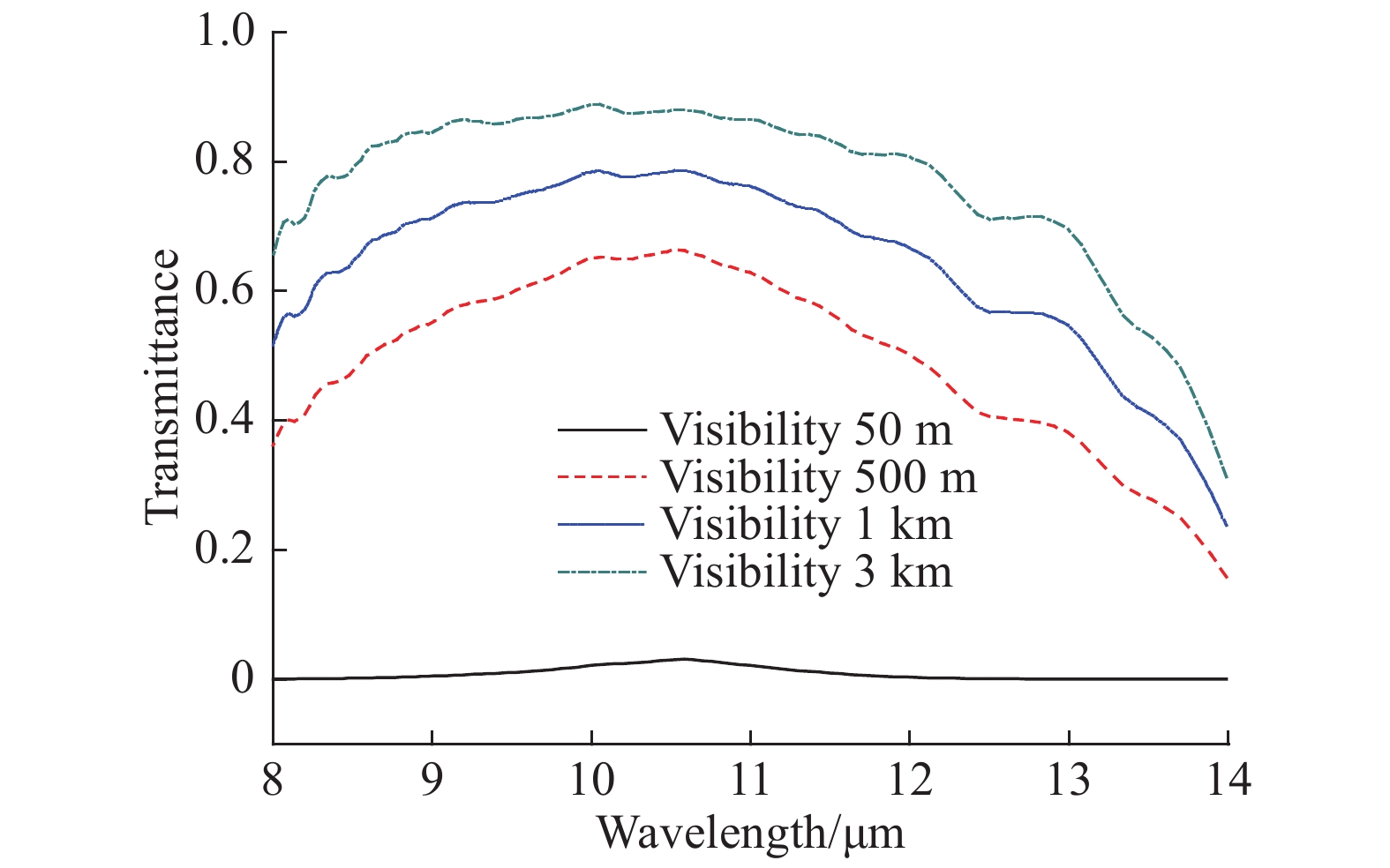
雾是在高湿度条件下由小水滴或冰晶形成的水汽凝结物,红外辐射在雾中传播时,衰减系数主要取决于雾粒子浓度的大小,而雾粒子浓度的变化可通过能见度来表征。8~14 μm波段,不同能见度条件下雾天大气透过率的仿真结果如图5所示(LOWTRAN参数设置为:西安七月平均大气模式,辐射雾消光系数,海拔高度350 m)。从图中可以看出,当能见度由3 km到50 m变化时,大气透过率明显减小,特别是能见度降至50 m时,大气透过率已经接近于0;对比图3可以发现,当能见度为3 km时,雾对大气透过率的影响已经相对不明显。
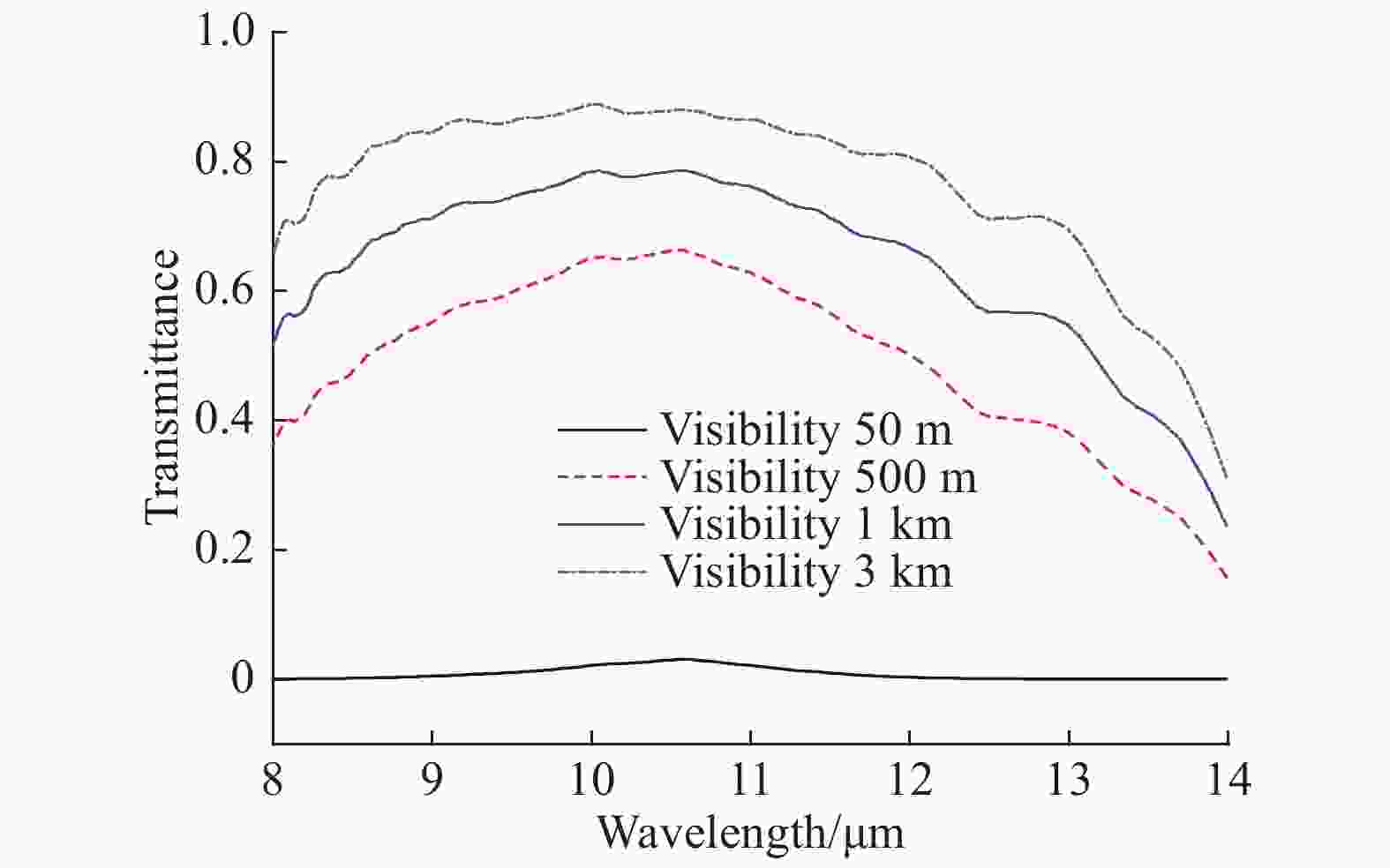
Figure 5. Atmospheric transmittance in fog
将8~14 μm波段的大气透过率均值代入公式(12)进行仿真计算,目标背景温差设置为5 K,其他参数设置见表2。雾天能见度对探测距离和最大安全车速的影响,分别如图6和图7所示。从两张图中均可以看出,探测距离和最大安全车速随着能见度的增大均逐渐增大,且变化趋势在能见度小于1 km时,比较急速,在大于1 km时比较平缓,说明当能见度小于1 km时雾天对探测距离的影响加剧。因此辅助驾驶过程中,当能见度小于1 km时应以识别条件下的最大车速控制为主;能见度大于1 km时,可根据路况情况选择识别或发现条件下的最大车速。结合图7可以看出,能见度为3000 m时,土路、混凝土路两种路面下的最大车速分别达到33~61 、38~70 km/h,能见度为500 m时,分别降至21 、25 km/h。
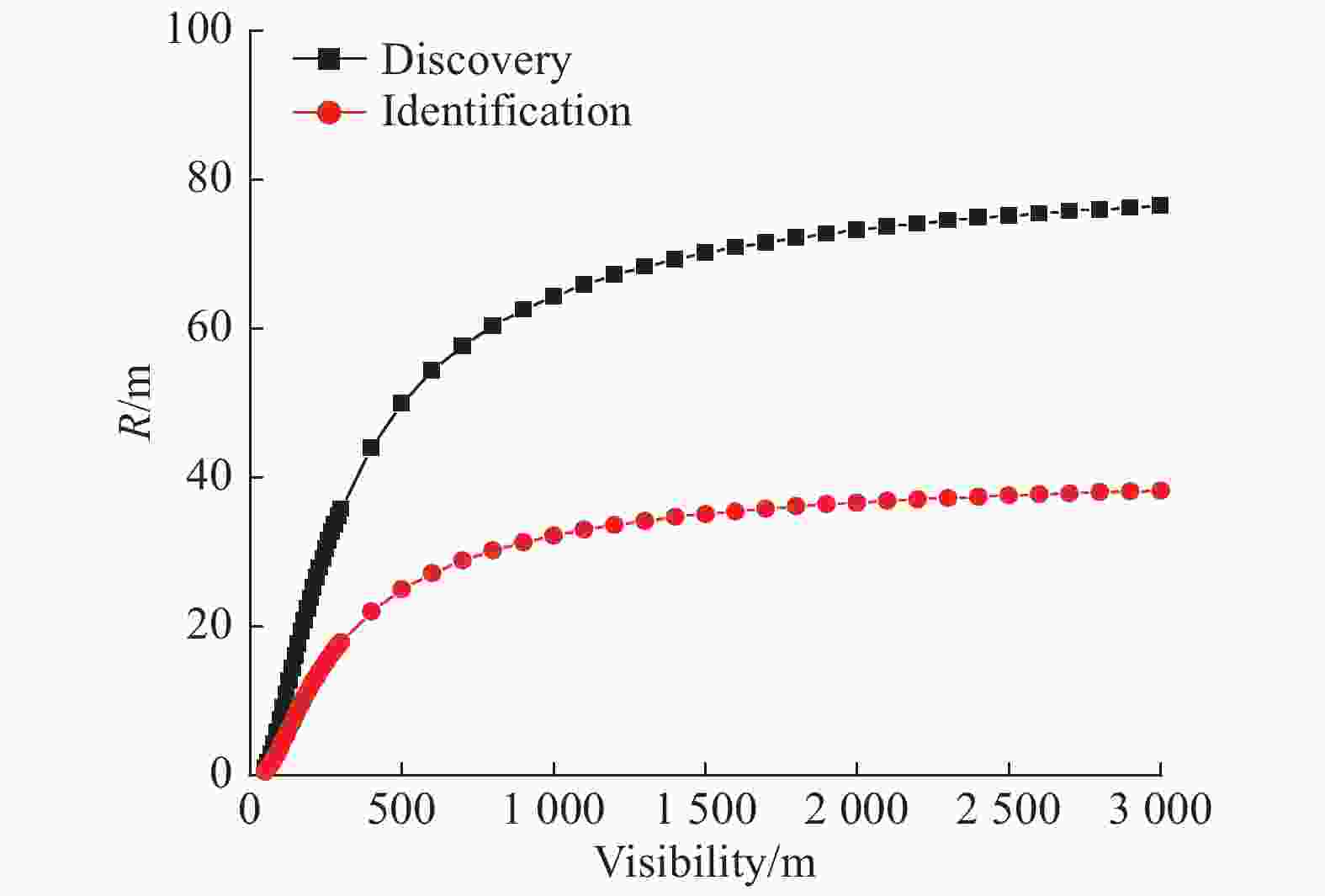
Figure 6. Relationship between detection distance and visibility in fog

Figure 7. Relationship between maximum safety speed and visibility in fog
-
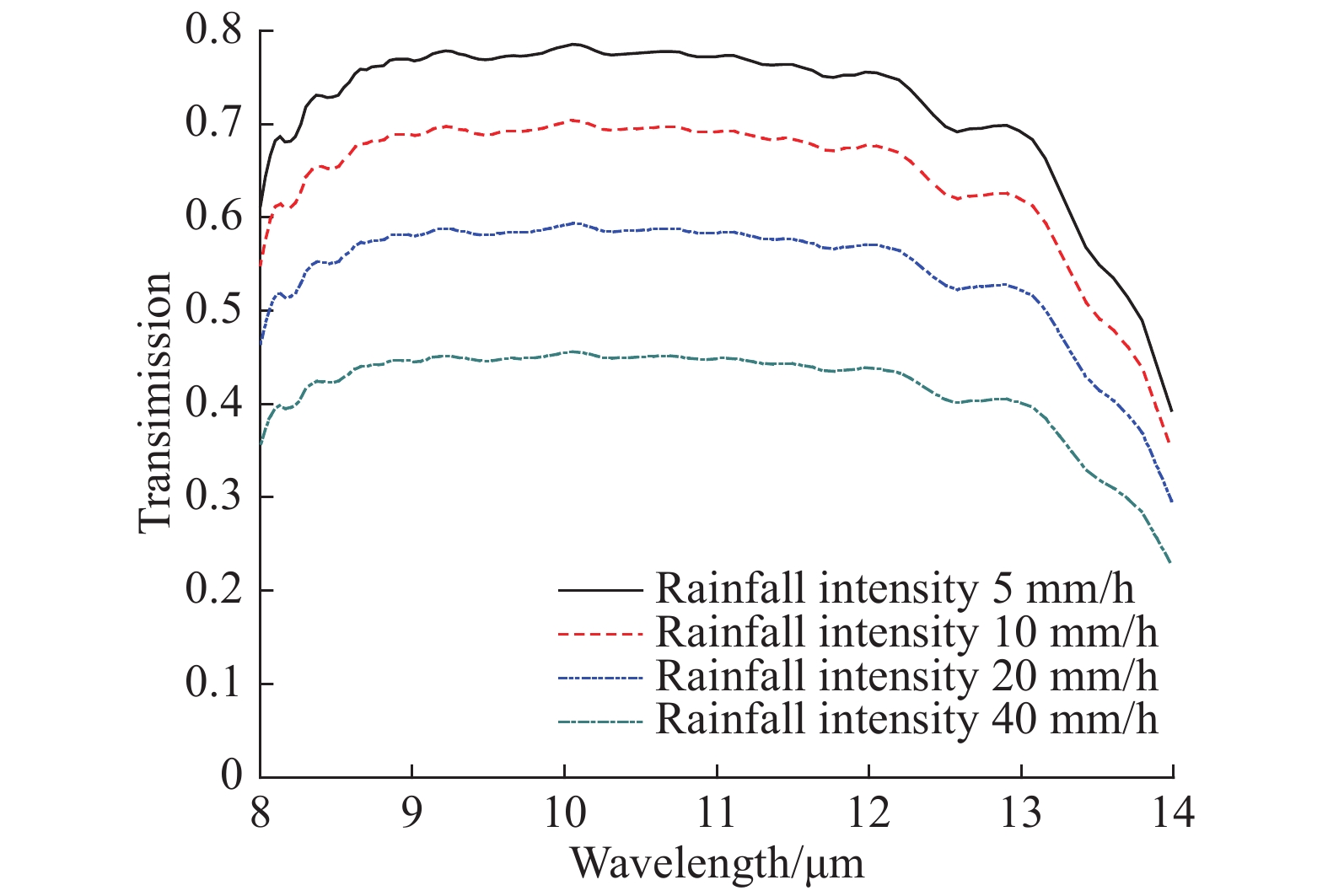
雨天同样会对红外辐射信号形成衰减,从而影响车载红外辅助驾驶系统的探测距离。同时,雨天还会造成路面的泥泞和湿滑,对滑动附着系数有很大影响,导致车辆制动性能的下降。如图8所示,为雨天8~14 μm波段大气透过率的仿真结果(LOWTRAN仿真参数设置为:西安七月平均大气模式,乡村消光系数,海拔高度350 m)。图中显示了不同降雨量时的透过率曲线,可以看出从5~40 mm/h变化时,大气透过率明显减小。同时,还可以发现辐射波长从8~14 μm变化时,雨天的透过率曲线相对比较平缓,这是由于雨天粒子的尺寸要比雾滴的尺寸更大,其产生的衰减为非选择性衰减,对8~14 μm整个波段都有明显的衰减作用。
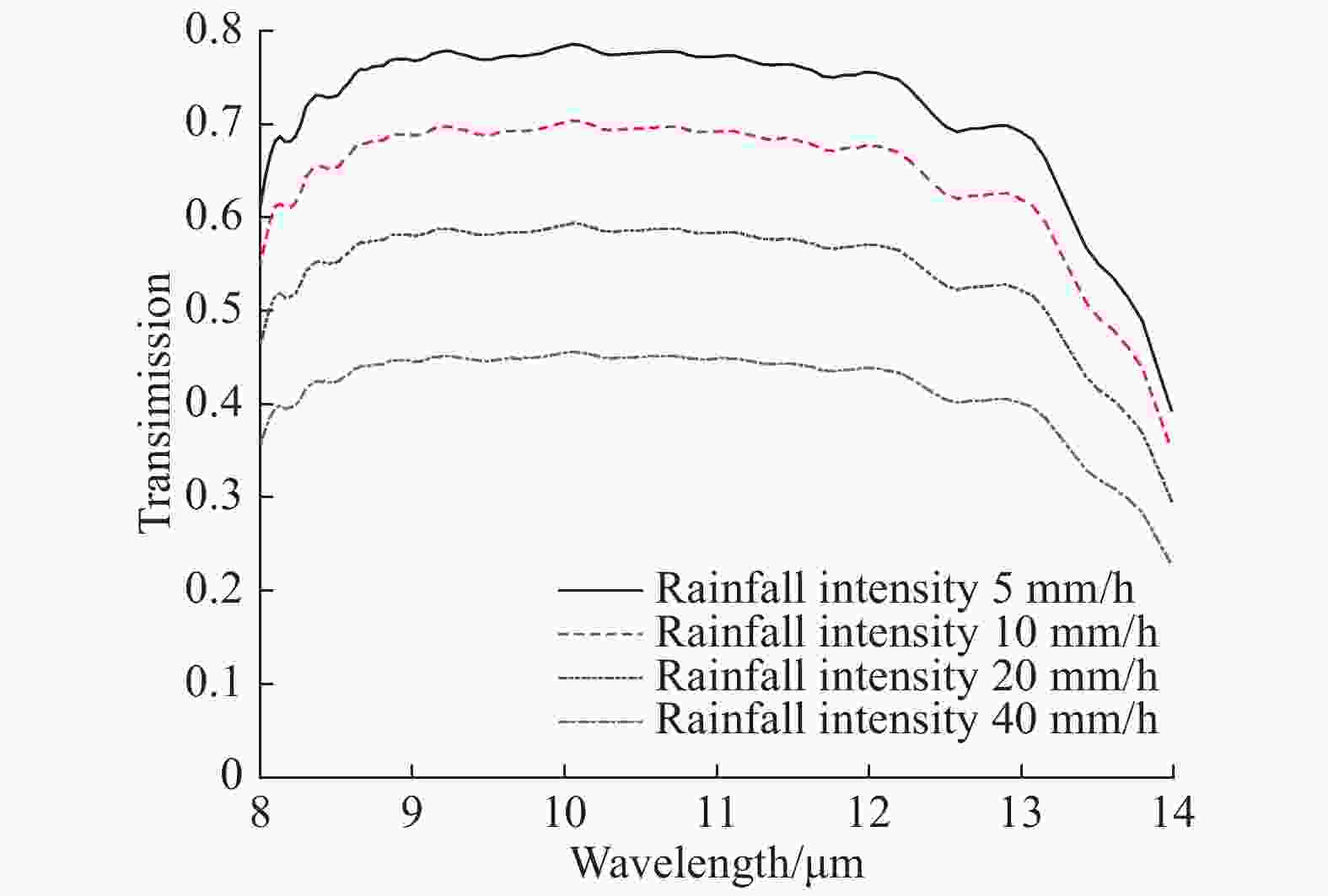
Figure 8. Atmospheric transmittance in the rain
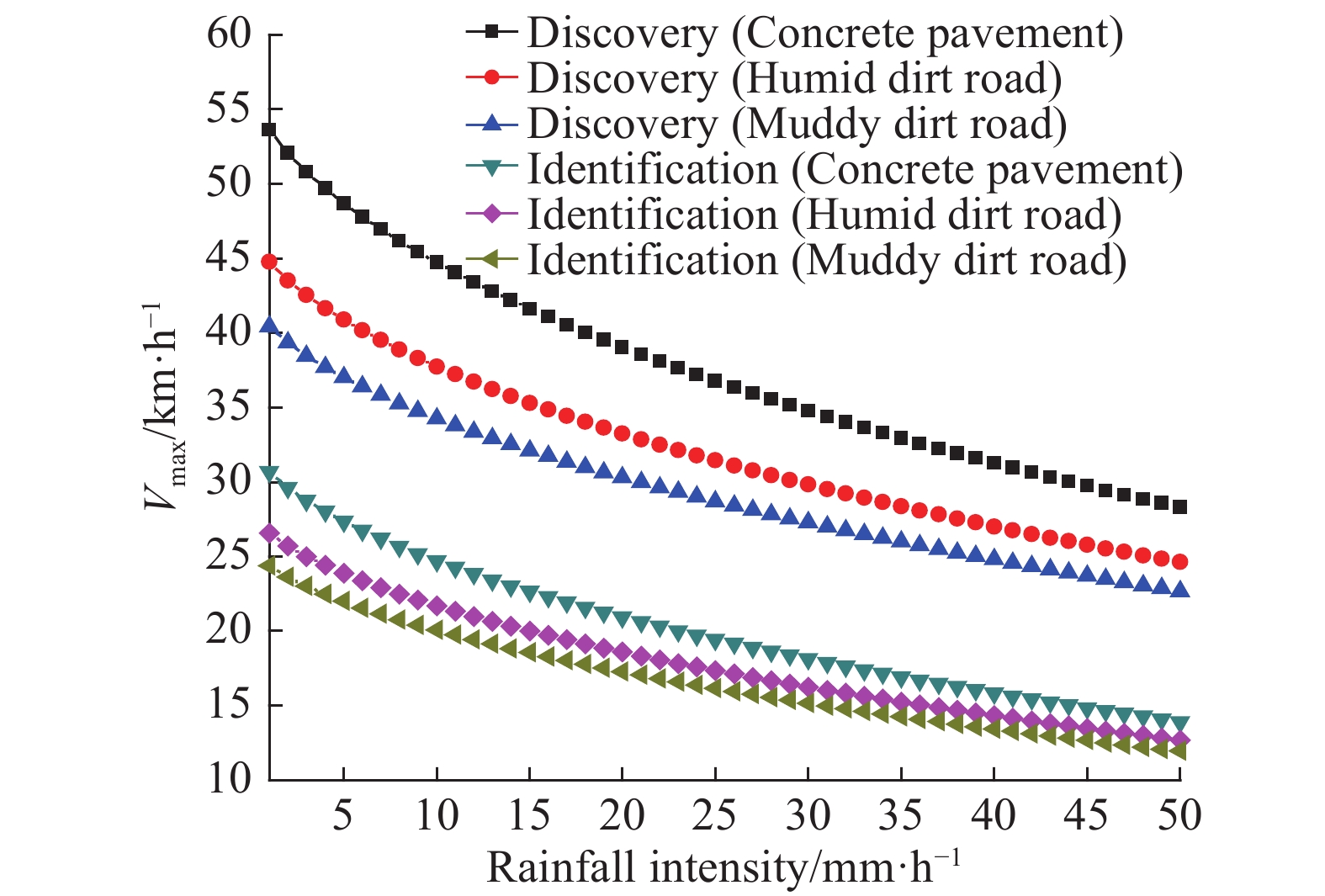
将8~14 μm波段的大气透过率均值代入公式(12)进行仿真计算。雨天降雨强度对探测距离和最大安全车速的影响,分别如图9和图10所示。从图9可以看出:随着降雨强度的增大,车载红外夜视系统对20 cm目标的探测距离逐渐减小,降雨强度为50 mm/h时发现距离、识别距离分别减小至36 和18 m。对于混凝土路和土路,雨天会导致混凝土路面的潮湿、土路面的潮湿或泥泞,路面滑动附着系数减小(如表1所示)。如图10所示,潮湿混凝土路、潮湿土路和泥泞土路三种路面下,随着降雨强度的增大,由于夜视系统探测距离和路面滑动附着系数的减小,辅助驾驶最大安全车速均迅速减小。考虑到雨天驾驶安全风险较大,辅助驾驶过程中应区分路面状况的同时以识别条件下的最大车速控制为主,降雨强度5 mm/h时,三种路面下的最大安全车速分别可达到27 、24 、22 km/h,降雨强度增大至50 mm/h时分别降至14 、13 、12 km/h。

Figure 9. Relationship between detection distance and rainfall intensity
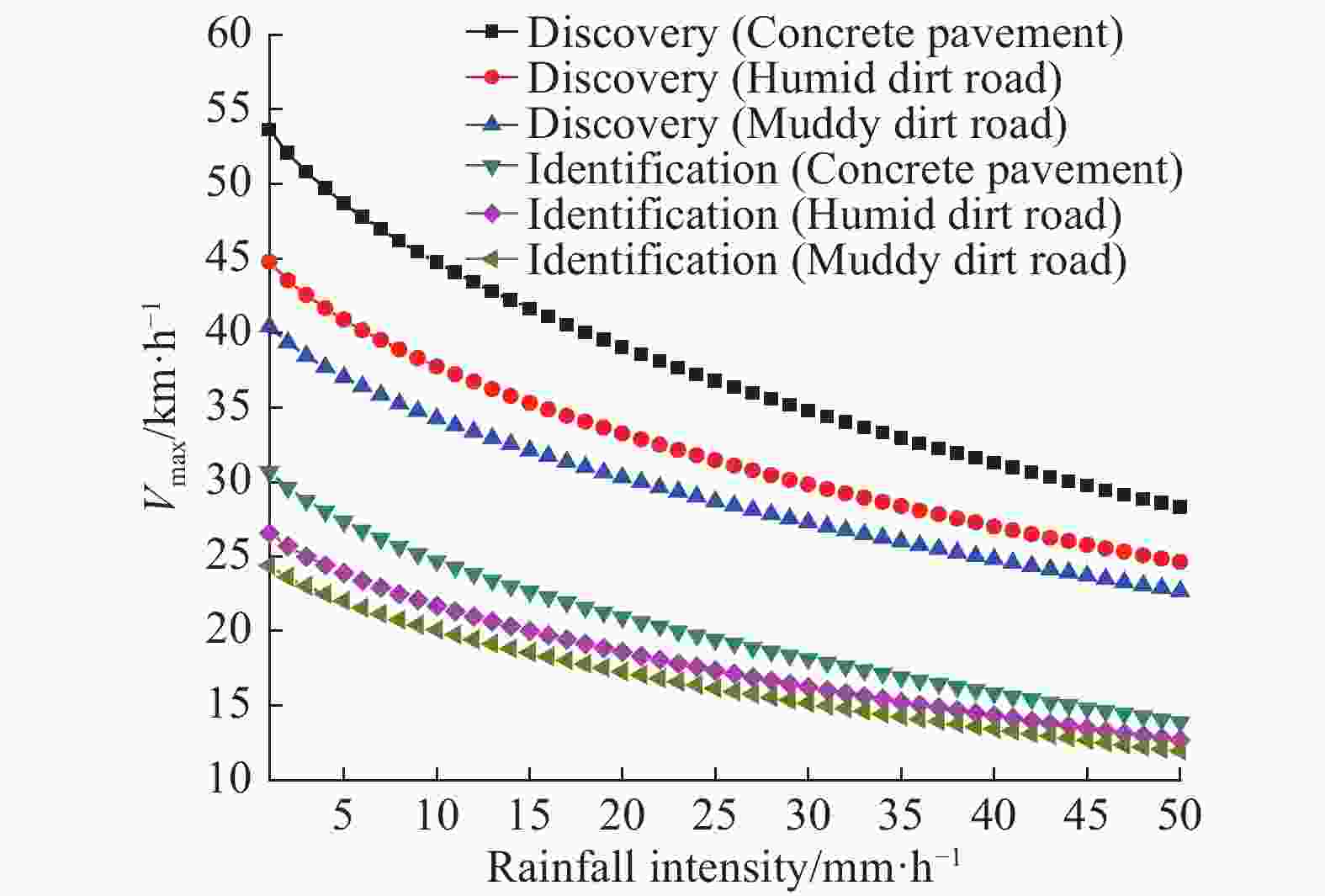
Figure 10. Relationship between maximum safety speed and rainfall intensity
-
文中开展天气条件对车载红外辅助驾驶性能影响的研究,首先分析了辅助驾驶安全制动过程,综合考虑辅助驾驶制动的五个阶段、红外探测静态性能模型和动态性能模型,建立了辅助驾驶安全行车视距模型;对最大安全车速的影响因素进行了分析,发现主要与滑动附着系数和探测距离有关;对MRTD进行修正的基础上,建立了最大安全车速与探测概率、目标与背景特性、大气透过率、观察等级等参数之间的关系,仿真分析发现:良好天气下大气透过率的影响较小,最大安全车速主要与目标背景温差有关;最后,以雾天和雨天为重点进行实例分析,区分不同的观察等级和恶劣天气影响下的不同路面状况,对探测距离和最大安全车速进行了模拟仿真;雾天影响下的仿真结果表明:能见度小于1 km时雾天对探测距离和最大安全车速的影响加剧,应以识别条件下的最大车速控制为主;雨天影响下的仿真结果表明:随着降雨强度的增大,探测距离和路面滑动附着系数的减小,导致最大安全车速均迅速减小,且雨天辅助驾驶应区分路面状况的同时以识别条件下的最大车速控制为主。文中研究成果可为车载红外辅助驾驶性能的相关研究提供借鉴,也可为不同天气条件下车载红外辅助驾驶系统的使用提供技术支持。
Influences of weather conditions on vehicular infrared assistant driving performance
doi: 10.3788/IRLA20190507
- Received Date: 2019-11-15
- Rev Recd Date: 2019-12-20
- Available Online: 2020-04-30
- Publish Date: 2020-07-23
-
Key words:
- vehicular infrared assistant driving system /
- assistant driving performance /
- maximum safe speed /
- detection distance /
- sliding adhesion coefficient
Abstract: Based on comprehensive analysis of vehicle infrared assisted driving safety braking process, infrared static detection model and dynamic detection model, the model of visual range for assistant driving safety was established. The relationship between maximum safe speed, road condition, infrared detection performance was analyzed. It is found that it is mainly related to sliding adhesion coefficient and detection distance. Through the correction calculation of infrared detection distance, the maximum safe speed at night was simulated. The results show that it is mainly affected by the temperature difference between target and background. Emphasis is laid on foggy and rainy weather for example analysis. The results show that foggy weather mainly affects the detection distance, especially when the visibility is less than 1 km, and the maximum safe speed need be controlled at 21-25 km/h when the visibility is 5 km. Rainy weather will affect the sliding adhesion coefficient and detection distance. The maximum safe speed control under infrared recognition is the main method for assistant driving. When rainfall intensity is 50 mm/h, the maximum safe speed need be controlled at 12-14 km/h.



























































 DownLoad:
DownLoad: