






-
舰船的检测与跟踪是现今军事及民用领域研究的热点问题之一,在对海面进行大尺度观测时,高空间分辨率图像数据计算量较大,不利于提高检测效率,使用中低空间分辨率图像进行检测。由于舰船自身所占据的像素较少,目标信号常淹没在海面背景杂波中,且单个舰船目标便于隐身[1],而空间尺度远大于船体尺寸的舰船尾迹不易隐藏,又含有丰富的物理及图像特征,能反演出舰船的排水量、航向和航速等详细信息,因此通过尾迹特征对水面舰船进行遥感检测具有很高的应用价值。
与趋于成熟的合成孔径雷达SAR图像舰船尾迹检测比较,基于红外遥感图像的舰船尾迹检测研究虽起步较晚,但也开始涌现成果投入应用,加拿大遥感中心、挪威国防研究中心、欧洲海事安全局等机构在此领域较为知名。Xing等[2]采用长度归一化Radon变换对尾迹进行检测,并通过滤波预处理的方法增强暗尾迹;基于边缘特征和图像灰度对比,卢建斌等[3]提出了基于特征的舰船尾迹检测方法;基于图像信息融合,邹娜等[4]提出了一种基于Gabor滤波组和局部信息熵特征融合的红外舰船尾流检测算法;基于深度学习模型的优化,王春哲等[5]在候选区域获取的算法中融合了卷积边缘信息、显著性和目标位置信息,成媛媛[6]采用LightGBM算法对舰船及其尾迹进行模型建立和检测提取。但现有算法除了应用深度学习之外,多是对在SAR图像中应用良好的拉东变换或霍夫变换进行改进,受限于红外遥感图像中尾迹特征的多样性和背景的复杂性,普遍存在无法处理大幅图像、检测精度或运算速度不高等问题[7],无法满足现今大范围、高精度的检测需求,因此需要寻找新的算法探测舰船尾迹。
为了提高船只检测率,文中从尾迹物理特性着手,联系尾迹图像特性,基于随机粗糙面理论,采用二维曲率滤波的方法对船只及其尾迹进行检测,建立了Dot-Curve检测体系;为了构建更准确完备的尾迹光学特征集,降低干扰项目的影响,对检测出的尾迹进行数学建模后提取特征,区分干扰目标,并对不同红外波段图像随机选取了数百幅场景进行验证。
-
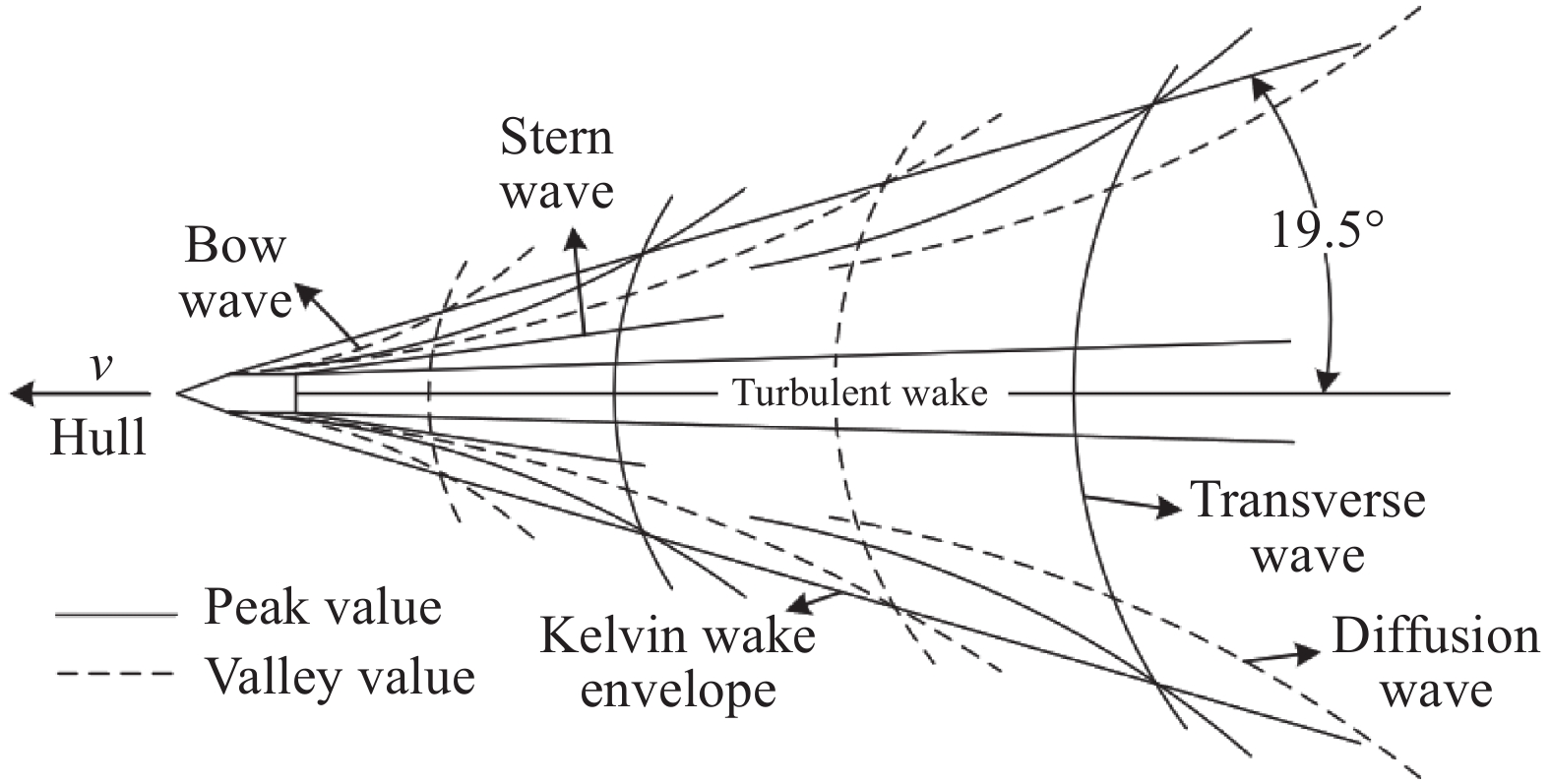
在水面航行的舰船,在行驶过的很长的一段区域内都将出现一条清晰的痕迹,即为舰船尾迹。虽然在不同场景中呈现出多种形态,但舰船尾迹按照其形成机制一般可分成表面波尾迹、湍流尾迹、内波尾迹三类[8],尾迹具体模式如图1所示。
Figure 1. Ship wake pattern
表面波尾迹有两个子类,一类是Bragg散射形成的窄“V”字形尾迹,在红外图像中无法呈现;另一类是由重力波组成的Kelvin尾迹[9],在红外图像中表现出单侧或双侧开尔文臂。
湍流尾迹[10]的产生需要有足够粗糙的海面作背景,由于船只航迹线附近的表面波被抑制,在红外图像中形成一条稍宽的暗区域,带有一边或两边亮线。
内波尾迹的生成主要出于船只运动产生的海表层流与风致短波的相互作用,在红外图像中未被表现出。
-
在长波红外波段,在垂直方向存在水温分层的海面区域,舰船的行驶使得航迹线下层冷水与周边表面温水处于同一水平面,该温差形成舰船尾流的热红外特征[11],在红外图像中形成一条很长的暗区域带。
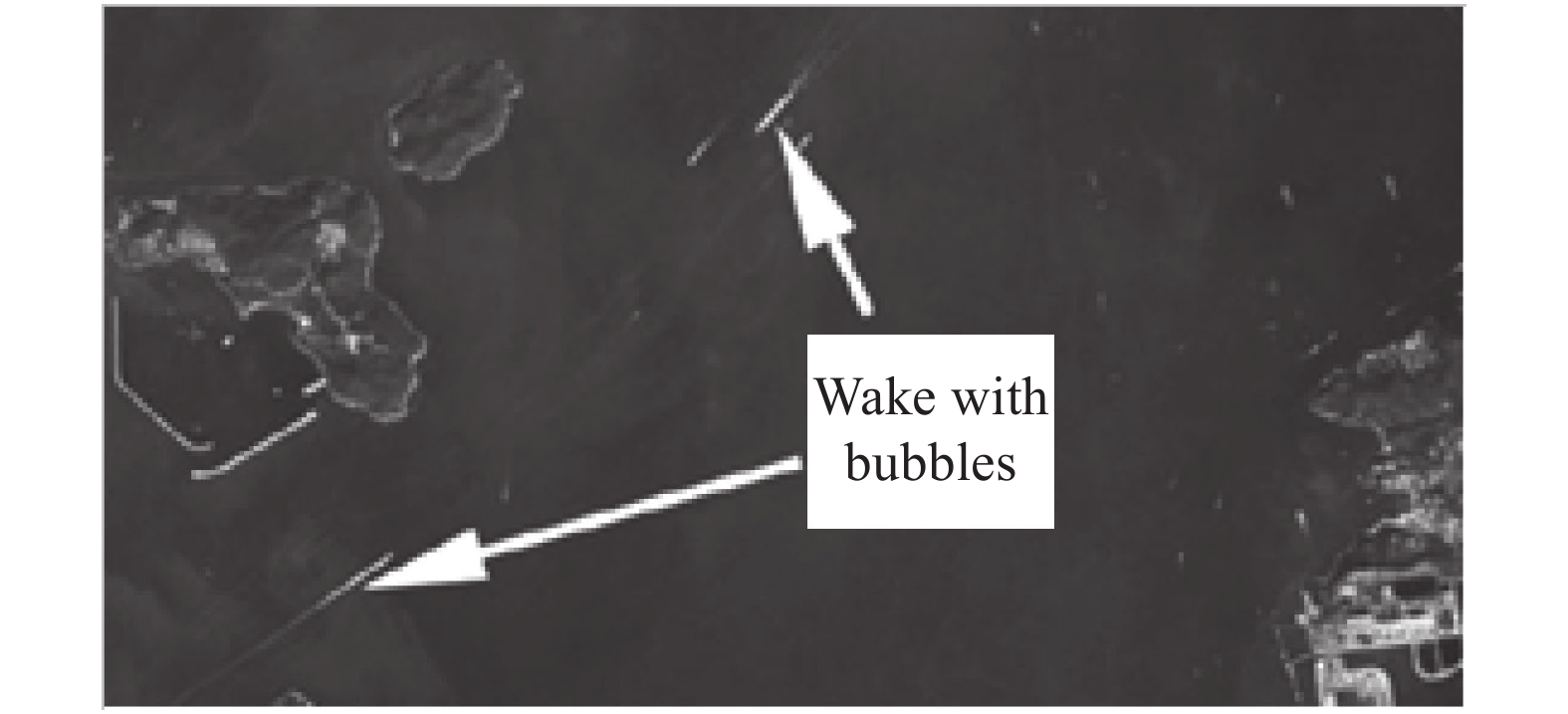
在近红外和短波红外波段, 含气泡尾迹[8]的表现非常明显并且持续时间也长,图2场景中舰船尾迹即为含气泡尾迹。随着与舰船距离的加大,尾迹中气泡浓度不断降低,遥感反射率不断减弱。

Figure 2. Optical remote sensing image of ship wake with bubbles
在空间分辨率为30 m级的红外遥感图像中,可观测到的舰船尾迹有亮尾迹和暗尾迹两类。亮尾迹的成因有两种,一是Kelvin 尾迹的倾斜面处于特定角度导致的太阳耀斑,但受日光入射角、尾迹倾斜面的角度、传感器视角以及海面粗糙度等各种条件的限制,在亮尾迹中的占比不高;二是含气泡尾迹,只要大气状况良好、有日光照射就可以成像 [12]。暗尾迹的成像原因也有两种,一是由舰船运动航迹线海面与周围海面粗糙度差生成;二是热红外图像中舰船运动航迹线海水与周围海面温度差引起。文中进行特征提取及检验的尾迹不外乎这几种。
-
随机粗糙面理论以像素坐标为x-y轴,以图像灰度为z轴数值,用曲面来表征图像,建立Dot-Curve体系,将整副图像的曲面分解成Dot点和Curve线,即多组一维曲线的集合进行数学表征。图3是Dot和Curve的示意图。
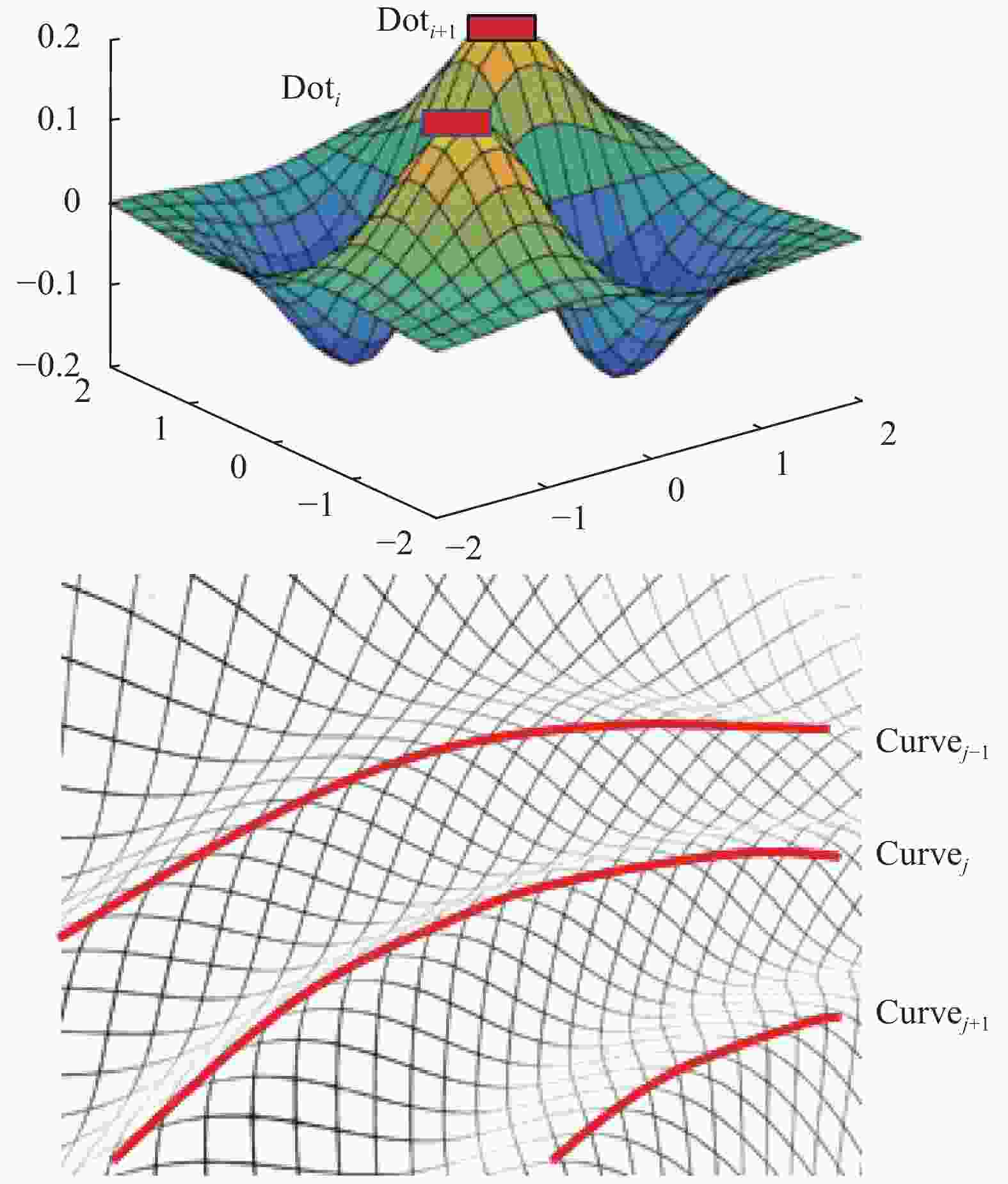
Figure 3. Sketch of Dot and Curve
对图像进行二维曲率滤波,各个方向二维曲率最小值大于阈值的点,成为Dot点;各个方向二维曲率最大值大于阈值的点组成线状连通域,以其连通域线条内的点为Curve线主轴,在主轴上选择若干节点,以节点为中心,在垂直主轴方向上取若干点,作为副轴。
-
文中尾迹检测算法基于二维曲率滤波。对于连续曲面,曲率的求导公式为:
式中:$ y' $和$ y'' $为曲面上某点的一阶导和二阶导;$cur$为该点的曲率。对于由离散点构成的海面三维曲面,由于海面小目标附近的灰度值存在一个极值,即一阶导数等于0,由公式(1)可推得小目标处的曲率为:
即小目标处的曲率为二阶导数的绝对值。因此,为计算海面曲率,需要先计算出一阶导数为0的区域,然后再计算所得区域内的二阶导数,最后再求绝对值。基于曲率的尾迹检测算法流程如图4所示。
针对大尺寸、低对比度的红外遥感图像,为了提高图像对比度,实现图像去噪,需要先进行分辨率和灰度的调整,以及混合中值滤波等操作,对图像进行预处理。
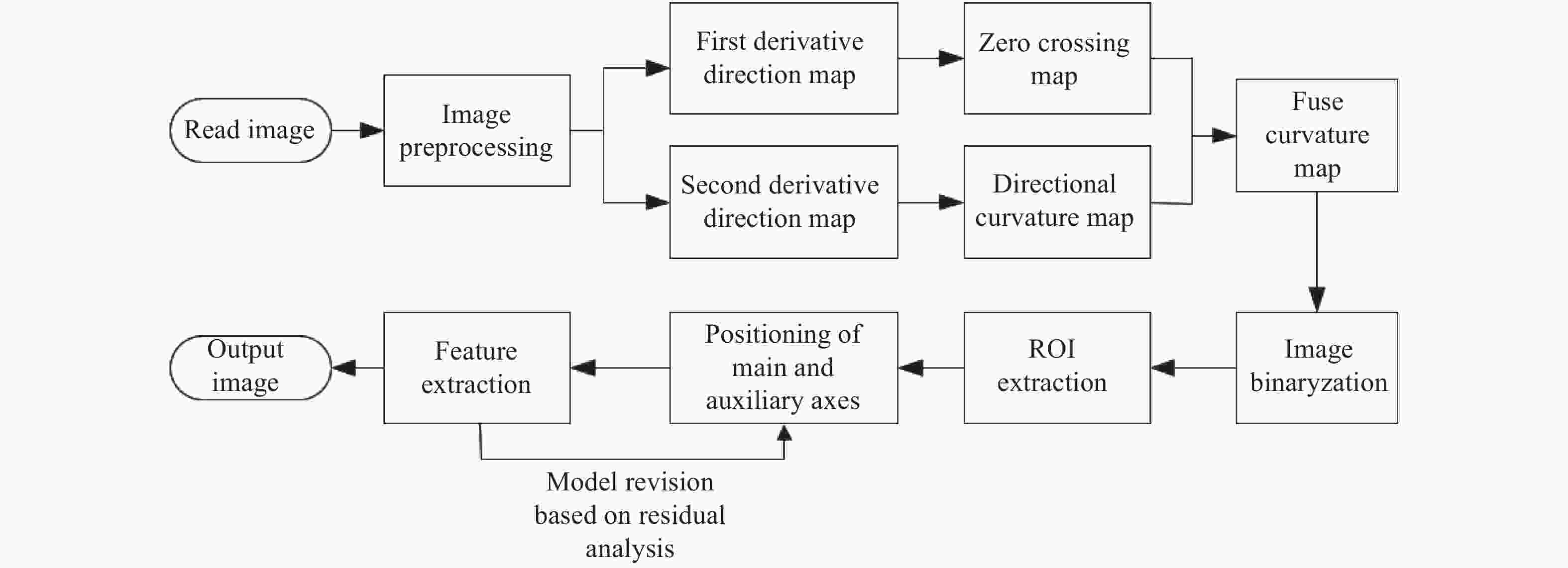
Figure 4. Wake detection and feature extraction algorithm
卷积模板的计算参考facet模型[13],对预处理后的图像分别在与y轴成0°,45°,90°,135°的四个方向计算一阶方向导数。计算一阶导数为0的区域之前先抑制海浪背景,因为海浪背景灰度起伏相对较小,将小于阈值的部分剔除:
式中:$ T(x,y) $为去除了海浪背景部分的一阶方向导数图像;$ I'(x,y) $为原一阶方向导数矩阵;$ Th $为滤波阈值,按成像质量取值,普遍取$0.1 \times \max (I'(x,y))$。
由于目标处一阶导数为0的像素也被剔除,转由计算邻域像素一阶导数乘积小于0的区域代替得到一阶导为0区域,再将图像二值化:
同样参考facet模型计算图像四个方向的二阶导数。为了抑制海浪背景的干扰,将二阶导数数值为正的值置0,然后取绝对值后经过平滑操作去除剩余的海浪得到二阶导数图像${I_{sd}}$。
融合一阶导数和二阶导数图像,得到抑制海浪背景之后的单向曲率图像${I_{cur}}$,表示为:$ {I}_{cur}={I}_{zero}\cdot{I}_{sd} $。
由于曲面上一点的高斯曲率定义为该点主曲率的乘积,所以抑制了海浪背景的曲率图像为:
曲率图像中,值大于阈值的像素点构成的线状连通域即为候选目标,对连通域内线条进行细化、生成链码、主副轴修正等处理后得到Curve线,即候选尾迹,各向曲率均大于阈值的像素为Dot点,即候选舰船。
-
为了提取出舰船尾迹特征,分别对亮尾迹和暗尾迹进行尾迹初步检测和特征统计。
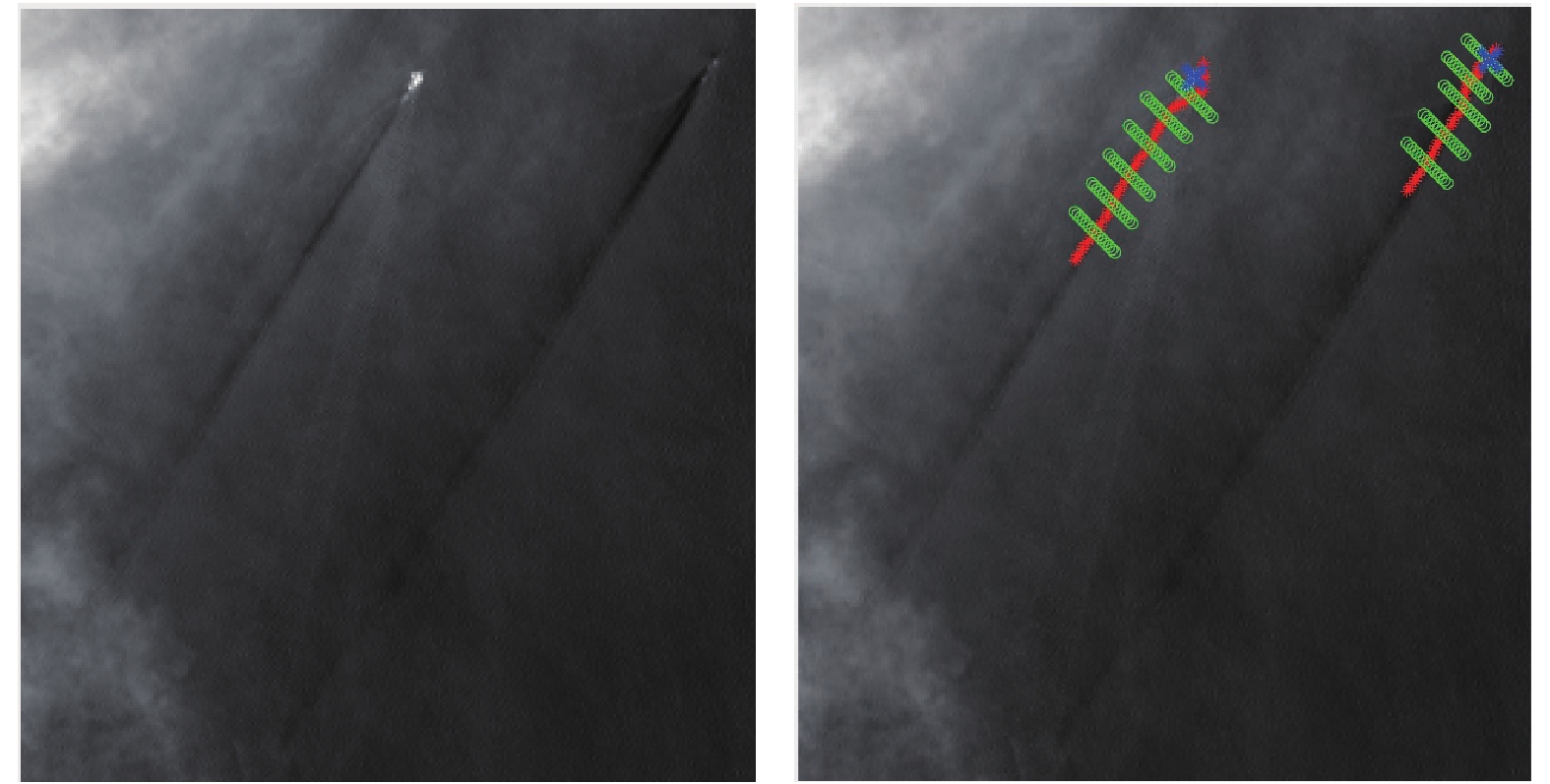
图5为韩国釜山港2019年10月21日短波红外波段图像中截取的部分场景,图中共有一条船,湍流尾迹前半部分被尾迹气泡覆盖,右边两块亮团和暗团为小块积云和它在海面上的倒影。
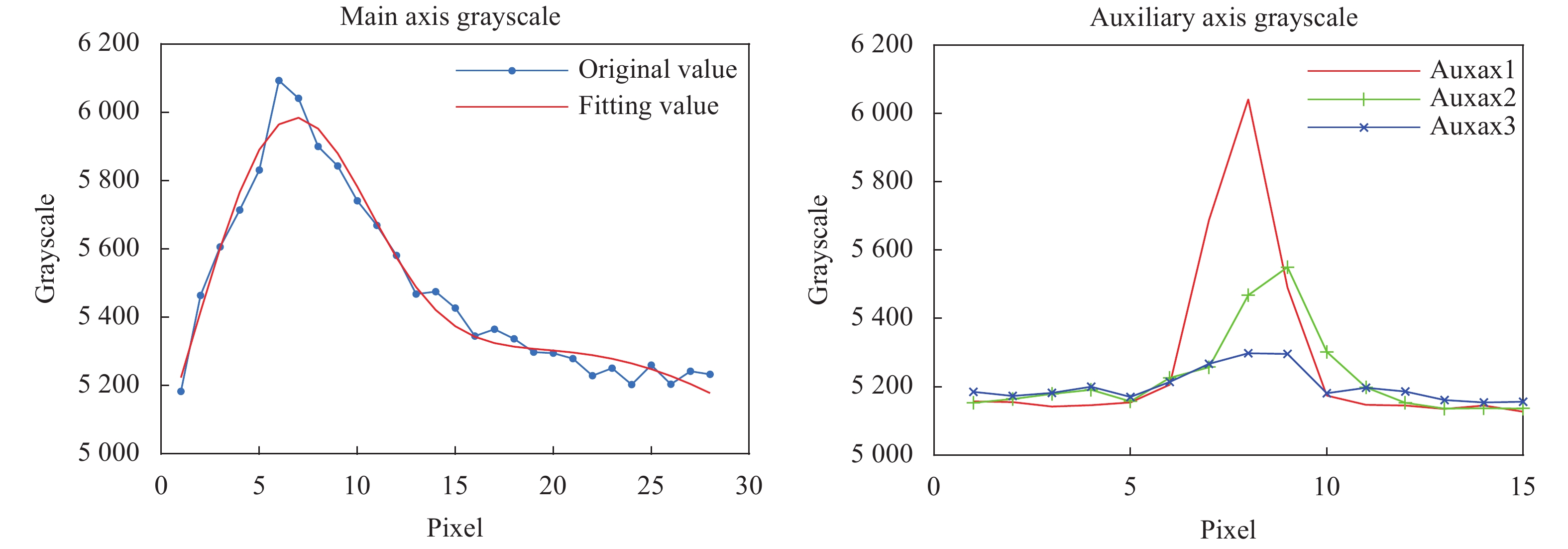
一共检测出一条Curve线,红色线状区域为主轴,绿色线状区域为副轴,蓝色x形区域为Dot点。主副轴灰度变化曲线如图6所示。主轴灰度曲线从左到右为从舰船到尾迹方向,由于尾迹气泡的亮度随着与舰船距离的增大而降低,尾迹与舰船相邻部分灰度先快速下降后逐渐平缓,主轴灰度可用双高斯函数进行拟合。副轴从1~3为近尾流到远尾流方向,灰度峰值依次下降,灰度曲线两边低中间高,符合高斯分布,副轴灰度最大值点在副轴中点附近。

Figure 5. Bright wake original image and test results
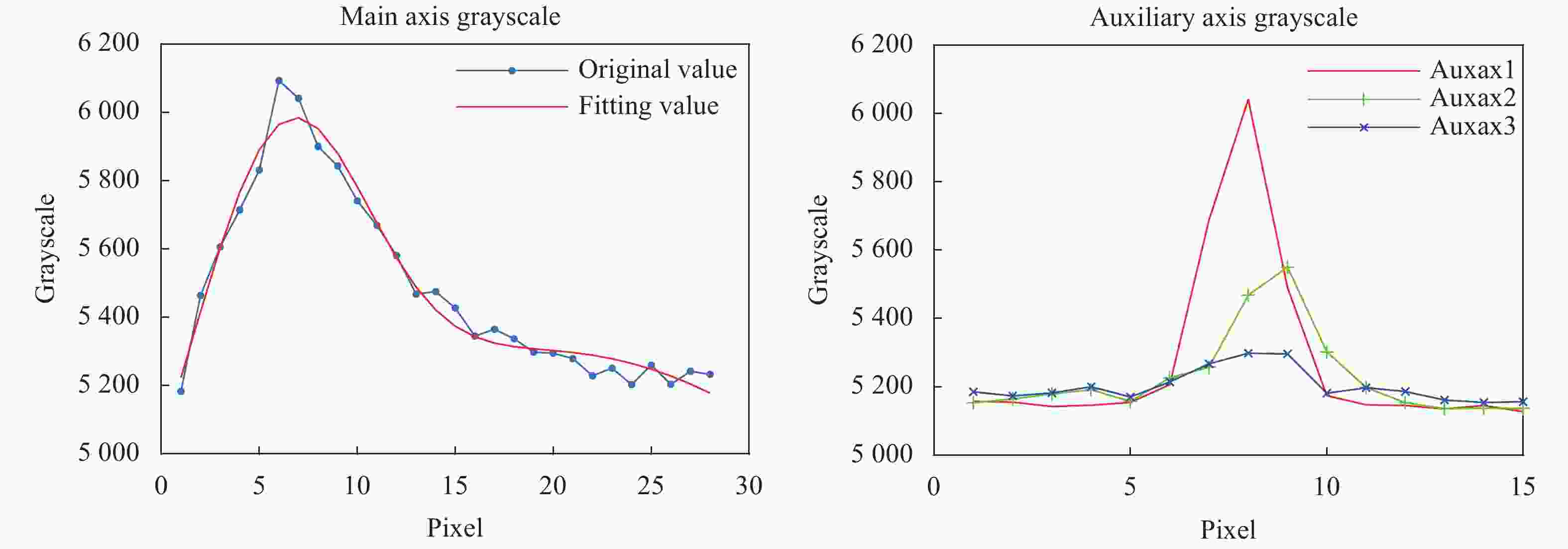
Figure 6. Grayscale curve of main and auxiliary axes of bright wake
对主副轴的灰度均值、灰度方差、副轴两侧灰度斜率(由两侧向尾迹方向拟合)进行统计,统计结果见表1。由于检测结果为亮尾迹,表格中,主轴灰度均值高于副轴灰度均值,主轴灰度方差较大,副轴两侧灰度斜率大于0。
Length of main axis Gray mean value of main axis Gray mean value of auxiliary axis Gray variance of main axis Gray variance of auxiliary axis Gray slope of auxiliary axis 28 5484.89 [5270.13;5227.13;5201.33] 271.58 [265.54;124.75;47.66] [107.77,98.12;33.06,
58.71;15.80,21.13]Table 1. Statistics of characteristics of main and auxiliary axes of bright wake
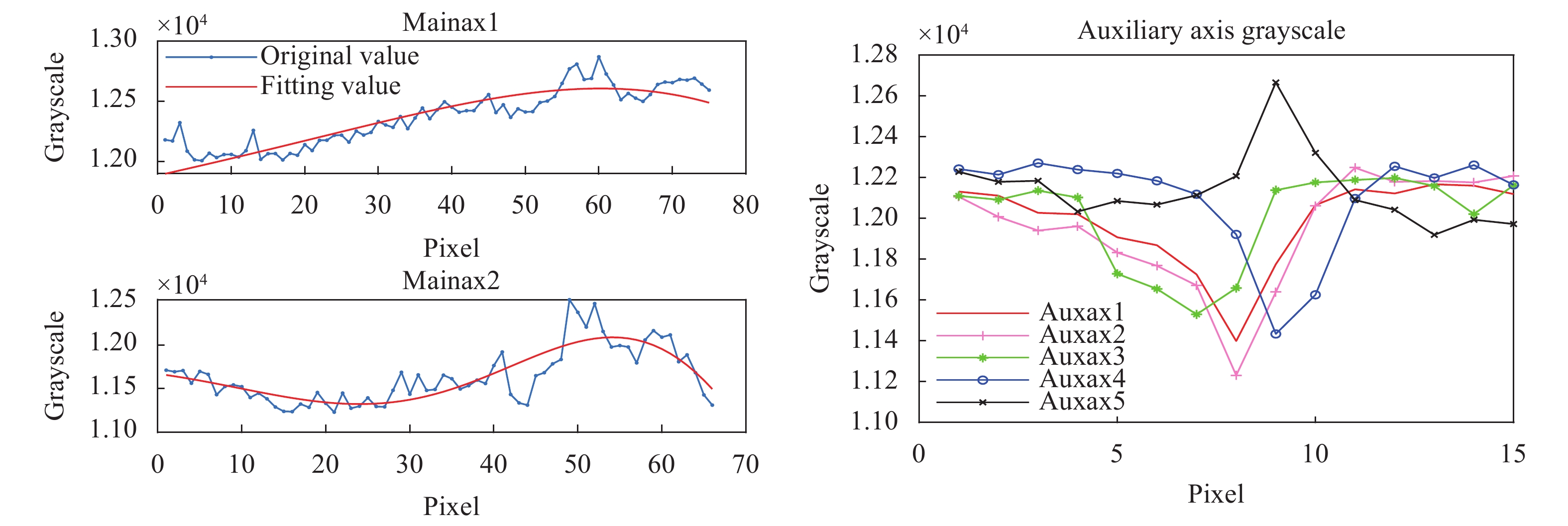
图7为韩国釜山港2019年8月2日短波红外波段图像中截取的部分场景,图中共有两条同向行驶的舰船,其湍流尾迹气泡少,表现为典型的暗尾迹,检测到的主轴为暗尾迹加上船只一侧边缘。主副轴灰度曲线如图8所示。

Figure 7. Dark wake original image and test results
对主轴的灰度进行分析,曲线图从右到左为舰船到远尾流方向,由于航迹线区域海面粗糙度的变化,舰船部分灰度值较高,近尾流部分灰度逐渐降低,往远尾流方向去,灰度又有所上升。以第二条主轴的副轴灰度为例,图8中副轴5为舰船部分,两边低中间高,符合高斯分布;其余为尾迹部分,副轴灰度曲线两边高中间低,呈反高斯形状。
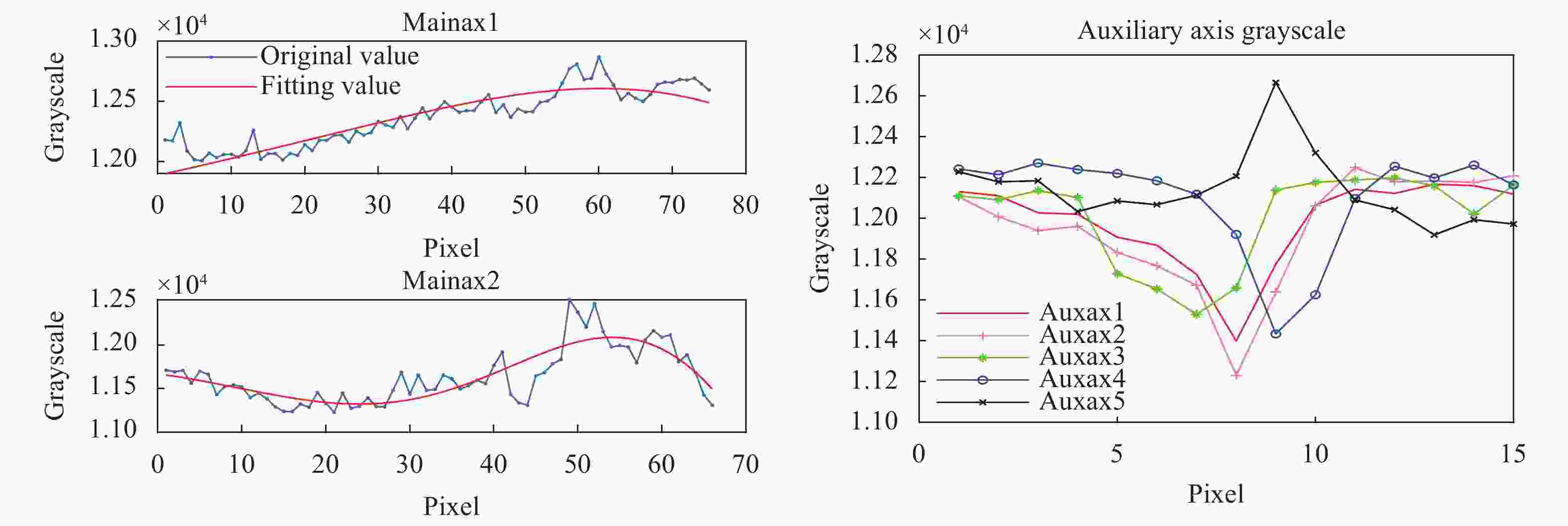
Figure 8. Grayscale curve of main and auxiliary axes of dark wake
对主副轴的灰度均值、灰度方差、副轴两侧灰度斜率(由两侧向尾迹方向拟合)进行统计,统计结果见表2。对于暗尾迹,副轴灰度均值大于主轴灰度均值,主轴灰度方差较大,因灰度曲线中间下凹,尾迹部分副轴两侧灰度斜率小于0,而船只部分副轴两侧灰度斜率大于0。
Length of main axis Gray mean value of main axis Gray mean value of auxiliary axis Gray variance of main axis Gray variance of auxiliary axis Gray slope of auxiliary axis 75 12370.44 [12388.00;12478.40;12604.87;
12713.93;12673.53;12677.73]234.51 [134.72;142.01;133.78;
119.19;110.90;186.68][−58.02,−54.10;−48.65,−51.40;−44.44,
−59.24;−39.52,−37.06;−49.67,
−34.17;18.24,20.79]66 11638.26 [11982.47;11947.07;12003.33;
12096.13;12139.93]316.11 [215.08;279.53;232.71;
249.21;180.56][−91.08,−86.40;−100.71,−117.10;
−92.79,−34.55;−35.80,
−91.88;9.24,74.57]Table 2. Statistics of characteristics of main and auxiliary axes of dark wake
综合不同波段大量图像中尾迹的检测结果,对海面舰船及内波、岛屿、云等不同目标进行相同的检测步骤,Dot结果多为船只或背景中点目标,Curve结果多为船舶尾迹或背景中呈线状的虚警,总结特征如下:(1)同幅场景中,舰船尾迹主轴灰度方差明显大于干扰项的主轴灰度方差;(2)若是亮尾迹,副轴两侧灰度斜率均大于0;若是暗尾迹,副轴两侧灰度斜率均小于0,即二者正负符号具有一致性。而干扰项多为一正一负或其中一个绝对值明显更接近0;(3)相较干扰项目,舰船尾迹主轴的线性度较高,排除海水漂移和舰船转向情况,较少出现无规则弯曲;(4)舰船尾迹主轴线两端一定有与之匹配的候选Dot点,干扰项目则不一定。
-
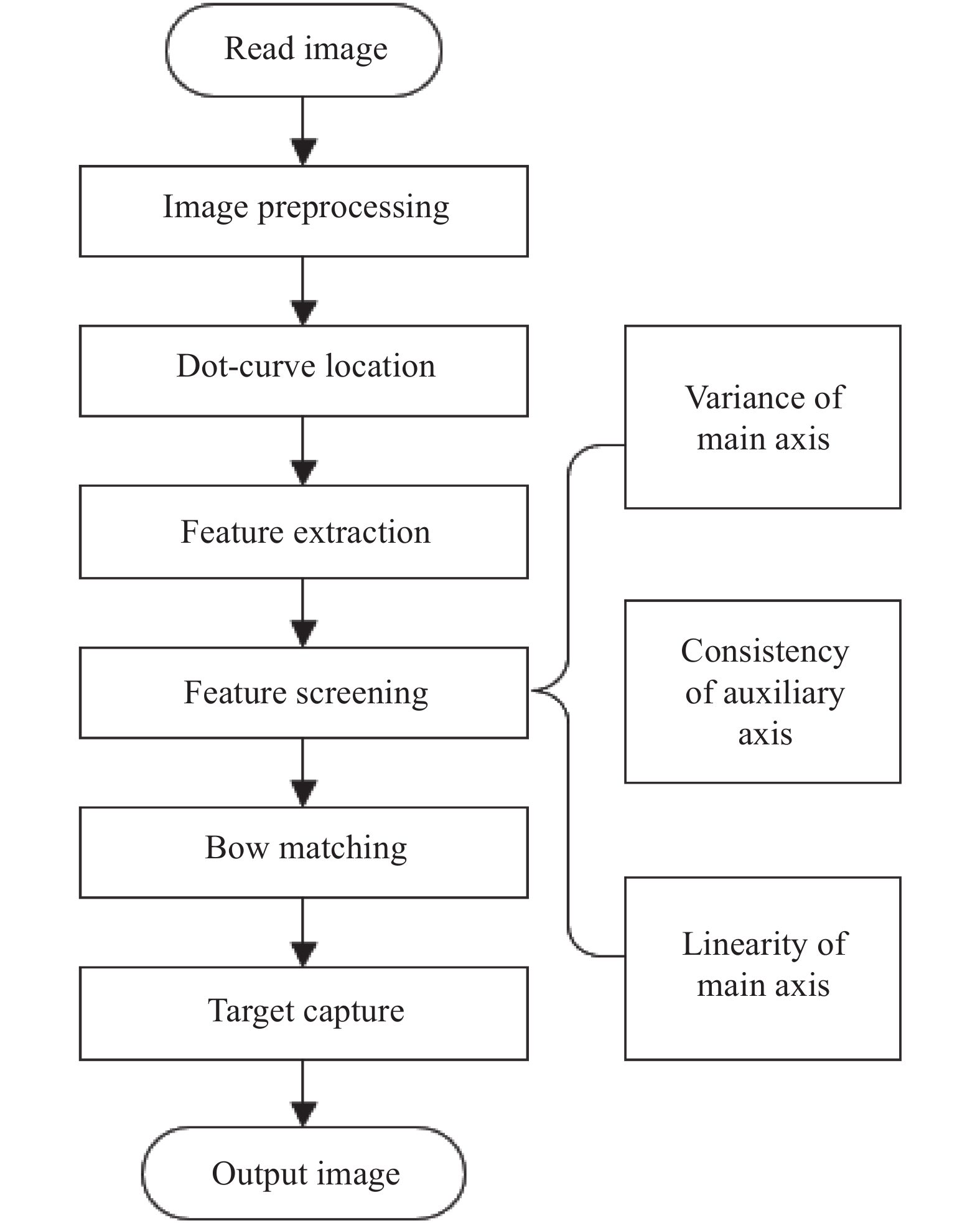
总结上述舰船尾迹特征,形成数学表征的特征集,对检测到的候选尾迹进一步鉴别筛选,算法流程如图9所示。
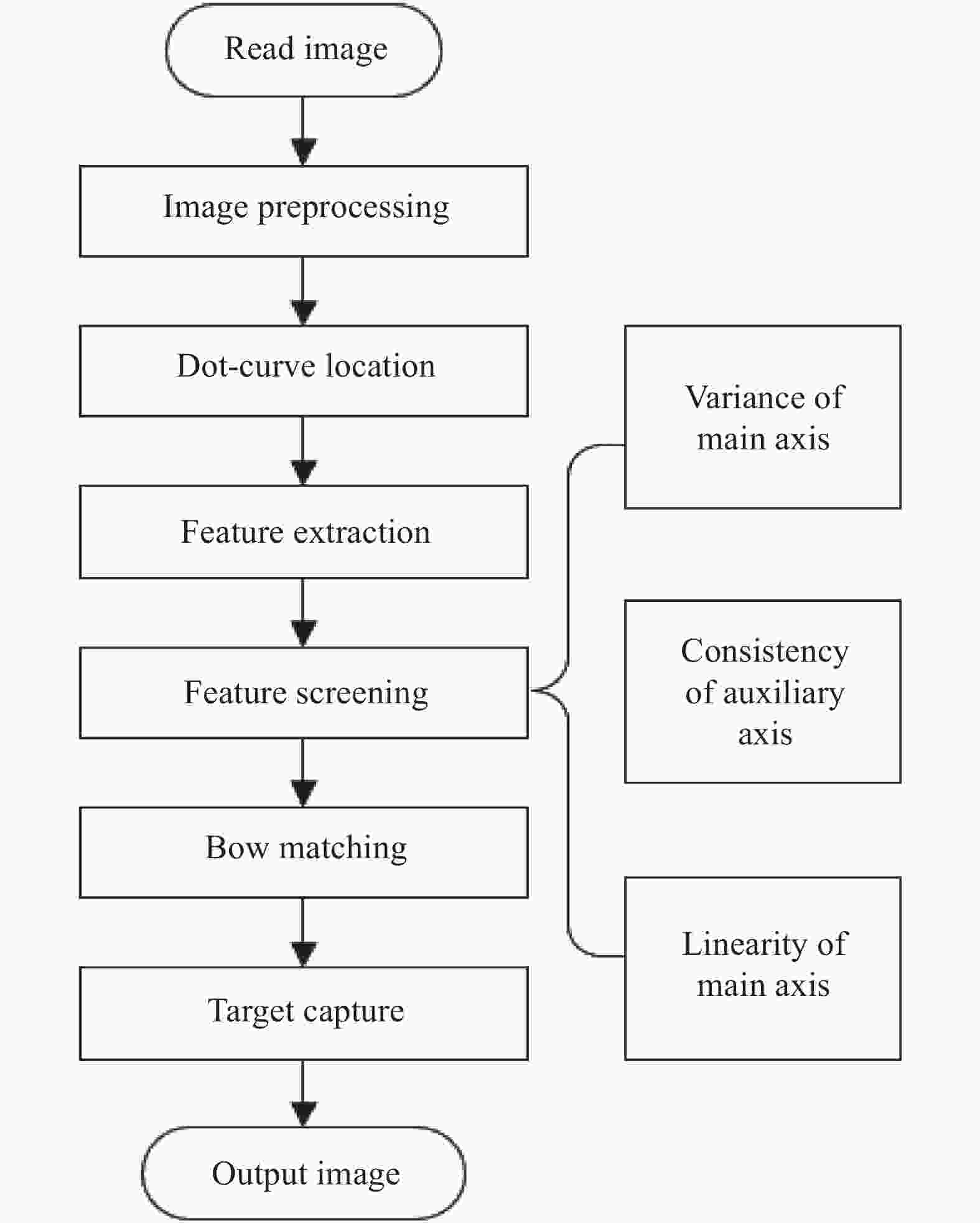
Figure 9. Flow chart of ship wake detection and identification algorithm on the sea
对图像进行预处理后,提取出Dot点和Curve线,检测出候选点目标和线目标,定位主副轴,对候选对象进行全面的特征描述,如主轴长度、主副轴灰度均值、主副轴灰度方差、主副轴坐标曲率变化等统计特征和几何特征,建立明确的特征定义,构建相对应的特征表征数学模型。然后根据总结的舰船尾迹区别于干扰项的特性规律,通过特征筛选,捕获目标,实现海面舰船尾迹的检测与鉴别。
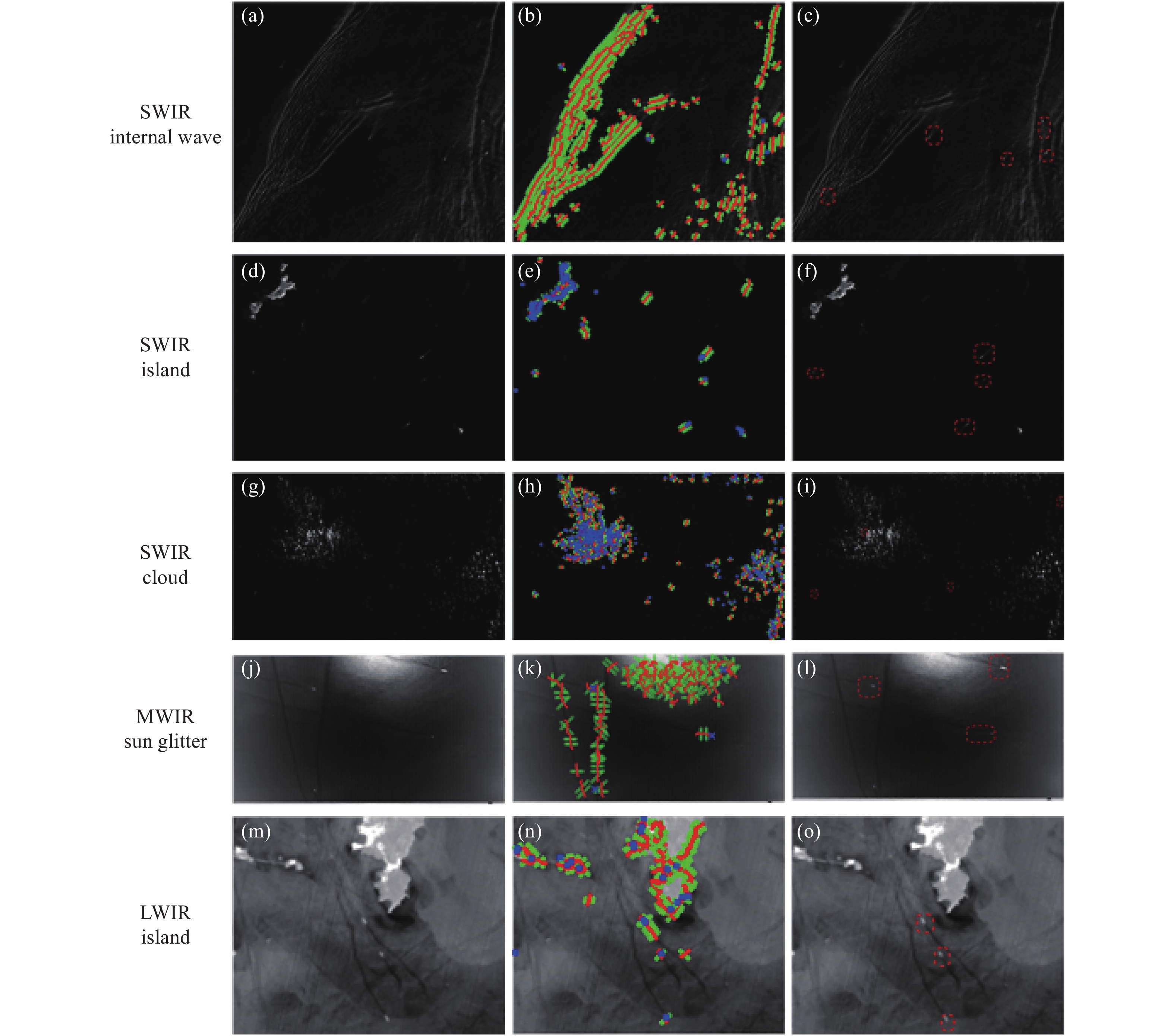
红外遥感图像的成像主要是光的反射和热辐射,分别对反射为主的短波红外波段SWIR、辐射为主的长波红外波段LWIR和二者皆有的中波红外波段MWIR三种波段的图像检验算法效能。截取大尺寸复杂背景下的海面场景对舰船目标进行检测及鉴别,分别对应不同海域,不同光照条件,不同波段,不同干扰项包括内波、岛屿、云、太阳耀光等,验证尾迹特征集的准确性和完备性,部分检测结果如图10所示。

Figure 10. Results of ship wake detection. (a), (d), (g), (j), (m) Original image; (b), (e), (h), (k), (n) Dot-Curve image; (c), (f), (i), (l), (o) Detection result
经过不同特征的多项组合,现行的尾迹鉴别选取了尾迹的四项特征转化成数学表征:尾迹主轴方差大于场景阈值,尾迹副轴两侧灰度斜率乘积大于0,尾迹主轴坐标到其进行一次多项式拟合后的直线的距离方差小于场景阈值,尾迹主轴端点邻域内存在候选Dot点目标。对复杂环境下的各类舰船进行目标检测及鉴别,每个波段分别选取100幅场景,统计场景中总船只数、识别船只数、正确识别船只数和误判船只数,计算检测率(正确识别船只数/总船只数)和虚警率(误判船只数/识别船只数),分析检测结果。
Band Detection rate False alarm rate SWIR 97.479% 8.403% LWIR 94.531% 3.968% Table 3. Efficiency of ship wake detection
从表3中算法检测效能数据可以发现,在不同红外波段,舰船检测率都很高,达到94.53%以上,高于现有大部分算法,经过尾迹鉴别,舰船虚警率降低到8.40%以下。其中,短波红外波段的舰船检测率最高,达到97.48%,但虚警率也最高,这是由于短波红外波段成像效果较好,部分舰船的多条尾迹均能检测出,在提高检测率的同时,偶尔会对同一个目标的多条尾迹造成重复检测,且在短波红外波段,部分舰船的尾迹,相较其他波段,长度较短,与背景对比度较弱,与同场景中部分高亮线状的岛屿边缘灰度分布差异较小,可能造成漏检。长波红外波段的舰船虚警率最低,低于3.97%,但检测率也相对最低,这是由于长波红外图像的灰度分布较为均匀,较长的尾迹和较少的干扰项降低了虚警率,但高温目标与低温背景的对比度不够高,在空间分辨率不够时会出现部分舰船的尾迹能检测出但船体消失的情况,造成漏检。中波红外波段对高温目标具有较强的探测能力,图像中的尾迹也长,所以检测率较高,但图像容易饱和,水面耀光对检测的影响相对明显,容易造成检测误差。基于曲率滤波的算法能够尽可能全面地提取尾迹,排除图像成像因素,算法带来的其余检测误差则需要对尾迹特征进行更深一步的分析研究。
如今大多数关于舰船尾迹检测的研究都集中在拉东变换或霍夫变换方法的改进上,要么在图像空间中增强尾流的直线形状,要么在变换空间中精确提取尾流响应的峰值,只有少数研究成功应用于海面光学图像中。与中山大学刘英飞等[14]基于光学图像的方法进行比较,该方法需手动提取船体,候选尾流首先通过以船体为中心的图像的归一化拉东变换获得,然后通过像素值验证、湍流尾迹识别、夹角验证和对比度验证来消除虚假尾流,在离散波段中表现最好的是全色波段,检测率为91.7%,相应的虚警率为6.7%。文中算法通过曲率阈值分割自动化获取船只;由于尾迹检测步骤不受船体位置限制,可检测大幅的背景复杂的图像,鲁棒性更好,不用裁剪成以船为中心的小图,提高了检测效率;基于曲率滤波的方法,对舰船转向、海水漂移等原因造成的有一定弯曲的尾迹检测效果更好,对长度较短、对比度较小的弱尾迹的检测效果也更好,提高了舰船检测率。
-
从不同红外波段的舰船检测鉴别结果来看,基于二维曲率滤波的舰船检测方法,能有效解决红外图像中复杂背景下船舶目标信号弱检测率低的问题,运算效率也较高,提取的相应尾迹统计特征和形状特征选取较为准确,为后续的船只跟踪和识别提供了基础。且针对不同的海况、大气状况、传感器参数等多种因素,可依据较少的样本,结合尾迹物理特性和图像特性,灵活组合特征,调节算法中阈值,适应性强。
从数据量大、情况多变的海面遥感红外图像中检测出船只及其尾迹,提取出特征并进行有效的目标鉴别是一个复杂的过程。文中针对短波红外至长波红外波段选用了部分特征,但实际应用中不同的探测器波段及成像质量以及特殊的船只运动状况及背景还需要更全面的特征描述,包括特征的信息反演问题,都将是下一步需要研究的内容。
Ship wake extraction and detection from infrared remote sensing images
doi: 10.3788/IRLA20210844
- Received Date: 2021-11-12
- Rev Recd Date: 2022-01-14
- Available Online: 2022-03-04
- Publish Date: 2022-02-28
-
Key words:
- wake characteristics /
- remote sensing infrared /
- curvature filter /
- Dot-Curve
Abstract: In infrared remote sensing images with low or medium spatial resolution, the number of pixels occupied by ships on the sea is very small, and the geometric shape and specific texture structure of the target are difficult to obtain. In order to improve the detection limit signal to clutter ratio, the ship wake feature with linear feature was taken as the detection element, which was mathematically characterized. The Dot-Curve detection system was established innovatively. Based on the two-dimensional curvature filtering, the ship detection and wake feature extraction were carried out preliminarily. The feature set was established, from which a number of features with large difference from the background interference items, including wake gray variance, positive and negative gray slope on both sides of the wake, wake linearity and the distance from the hull detection results, were selected to identify the detection results of the candidate targets, remove interference items and extract targets. The results show that after target identification, the ship false detection rate in different bands of infrared images is reduced to less than 8.40%, and the detection rate is improved to at least 94.53%. The ship detection algorithm combines the physical and image characteristics of the wake, which is suitable for many scenes and bands. The algorithm is refined and effective, the physical laws are clear, and the samples needed are few.




 DownLoad:
DownLoad: