








-
风力发电依靠风能为动力,机组的运行效率依赖于风速的大小和迎风的角度。为了提高风能利用率,降低风力发电机载荷,必须根据迎风面的风速和风向对机组进行有效的偏航控制[1-2]。传统风速仪无法优选安装位置,架设测风塔工程量大且成本较高。若将风速仪安装于机舱顶部,则实测气流受到风轮转动的强烈干扰,无法反映真实的迎风信息,造成风力发电机偏航误差大,风能捕获能力弱。据统计,风力发电机普遍存在偏航现象,偏航角度一般在7.5°~15°之间,对应的发电效率损失为2.4%~13%[3-5]。长期偏航还会造成机组的疲劳载荷和极限载荷显著增加,严重影响了风力发电机的运行安全和使用寿命。激光测风系统可以安装于机舱顶部或机舱内,所测量的风场一般位于风力发电机前方数十米至上百米处,避免了风轮转动对测风精度的影响,可为偏航控制提供可靠的迎风信息,且相干激光测风技术分辨率高、探测范围大,符合风力发电机运行对测风系统性能的要求[6-8]。ZX lidars、Windar Photonics、Leosphere等公司针对风力发电领域应用背景,分别推出了自主研发的商用激光测风系统[9-11]。Simley和Mikkelsen分别通过仿真计算和实验测试,对比了ZephIR连续相干型激光测风系统和Windcube脉冲相干型激光测风系统的风速测量误差,结果显示ZephIR连续相干型在50 ~100 m范围内具有更高的测量精度[12- 13]。相比于脉冲相干型系统,连续相干型系统还具有结构简单,成本低,寿命长等优点,易于工程应用[14]。
文中针对风力发电机偏航控制需求,改进了课题组近期研制的1.55 μm波段连续相干激光风速仪,加装二维扫描装置实现了对指定区域的风场观测[15]。之后与深圳市气象梯度观测塔进行了测风对比试验,验证了系统的精确性和稳定性。
-
大气中悬浮的气溶胶粒子随风飘动,是风场变化的有效示踪物。激光测风系统输出单一频率的高质量激光进入大气中,被沿途空间中的气溶胶粒子散射,其中小部分后向散射光按原路返回被系统接收。该后向散射信号与激光测风系统的本振光信号拍频,形成的差频信号中包含了由于气溶胶粒子运动而产生的多普勒频移,即
$${\upsilon _D} = \dfrac{{2{v_{los}}}}{\lambda }$$ (1) 式中:
${\upsilon _D}$ 为发生散射处气溶胶粒子运动所产生的多普勒频移;$\lambda $ 为出射激光的波长。通过提取该多普勒频移,可计算发生散射处气溶胶粒子运动速度沿望远镜径向的投影分量${v_{los}}$ 。通过合成空间中多个不同角度径向分量,即可反演测量区域的风场信息。 -
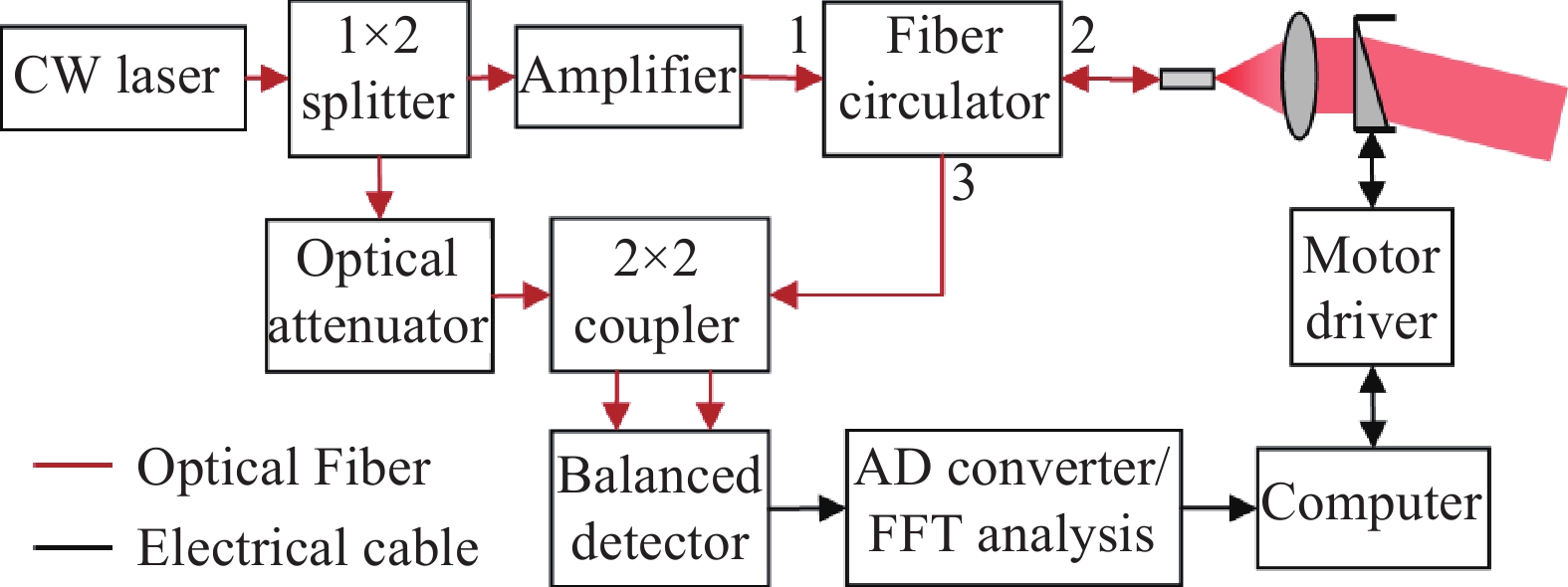
文中介绍的激光测风系统采用连续相干探测体制和全光纤光路,其结构如图1所示。
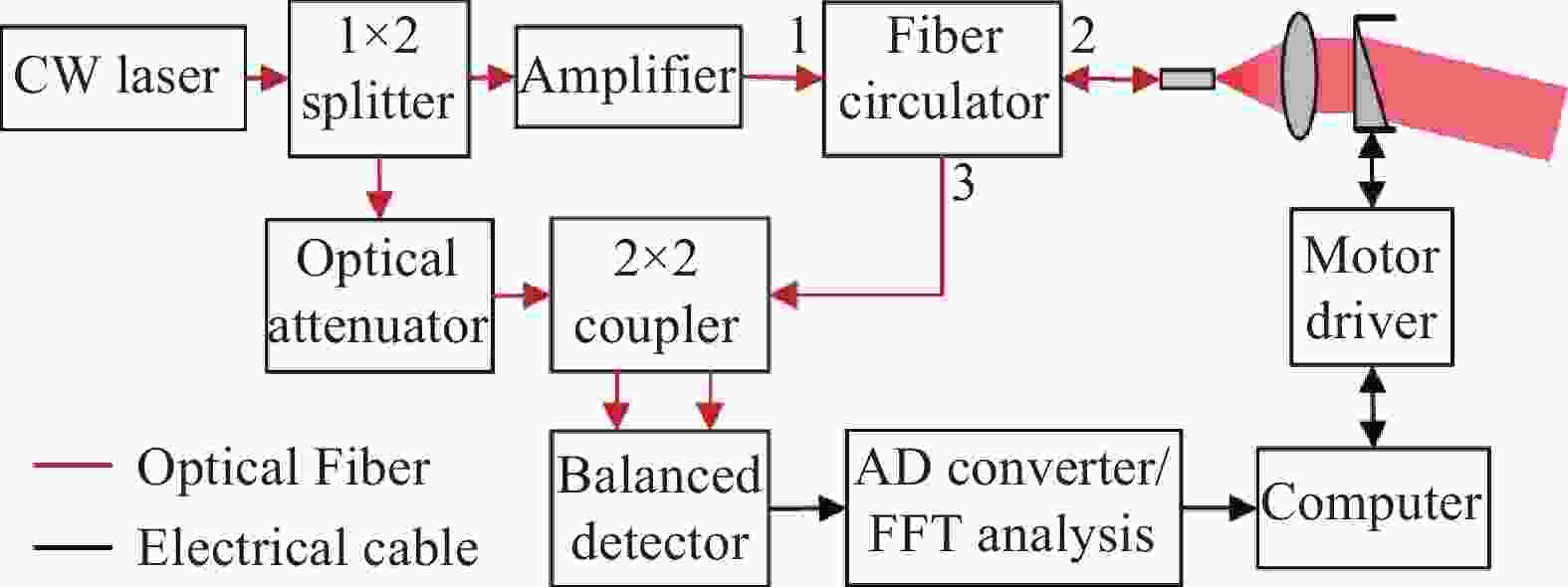
图 1 激光测风系统结构示意图
Figure 1. Schematic diagram of the laser wind measurement system
系统选用了一台1.55 μm波段的连续激光器,输出能量被保偏分束器分成两部分,其中一部分连接衰减器降低能量后用作本振光;另一部分经过光纤放大器和环形器后进入望远镜中。望远镜为同轴透射式结构,由非球面镜将光束聚焦并发射进入大气中,聚焦距离为80 m。大气中气溶胶的后向散射信号被望远镜接收,并与本振光相干后进入平衡探测器转换为电信号,之后由采集卡进行A/D转换,再利用板载现场可编程门阵列(FPGA)进行快速傅里叶变换(FFT),计算回波信号的多普勒频移以反演径向风速。系统安装了二维扫描装置,通过电机带动楔形镜旋转,完成扫描调速和角度定位,对空间中不同径向的风速进行测量,最终合成风场信息。
所设计的激光测风系统关键参数如表1所示,由于风电场的选址和机组的架设均考虑了当地的长期风向,出现180°风向反转的可能性很小,因此,为了提高自身的性价比,压缩体积和质量,激光测风系统没有使用移频设备。
表 1 激光测风系统关键参数
Table 1. Key parameters of laser wind measurement system
Item Parameters Value Laser Wavelength 1549 nm Linewidth 7 kHz@1549 nm Output power 1 W Telescope Effective aperture 70 mm Waist radius of Guassian beam 1.7 cm Focus distance 80 m Balanced detector 3 dB bandwidth 75 MHz Responsitivity 0.95 A/W A/D converter Sampling rate 250 MHz Sampling precision 14 bit -
激光测风系统运行过程如图2所示,以正对风力发电机方向为正方向,设定风速由
$u$ 、$v$ 、$w$ 三个方向分量构成,$\theta $ 为扫描锥角,$\varphi $ 为方位角。径向风速${v_{los}}$ 可表示为: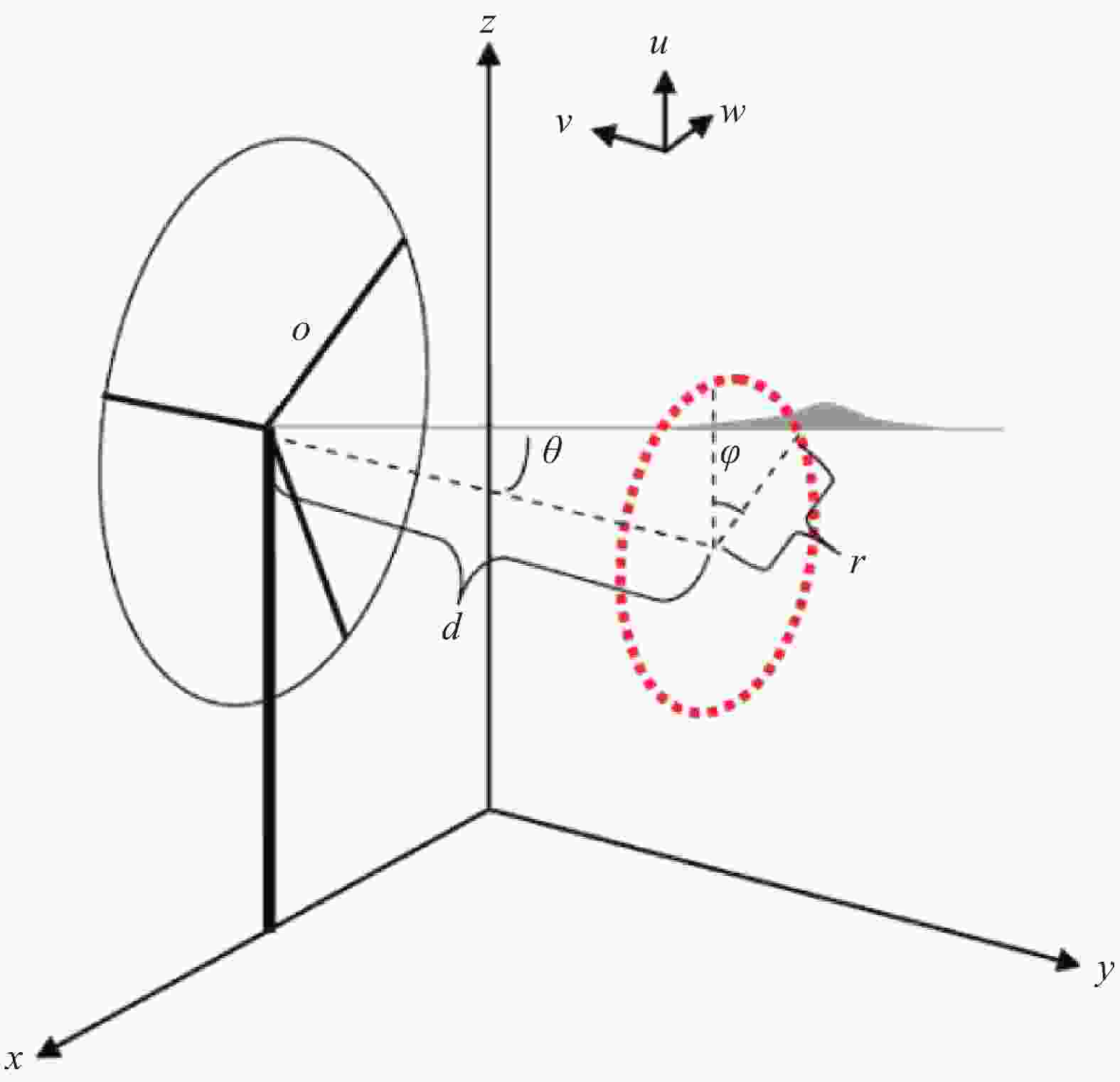
图 2 激光测风系统运行示意图
Figure 2. Operation of the laser wind measurement system
$${v_{los}} = u\sin \theta \sin \varphi + v\cos \theta - w\sin \theta \cos \varphi $$ (2) 假设大气均匀稳定且风力发电机没有偏航误差,此时风向应沿
$v$ 方向垂直于风轮所在平面xz,风速分量$u = w = 0$ ,则$v$ 分量的估计值为:$$\hat v = \dfrac{{{v_{los}}}}{{\cos \theta }}$$ (3) 将公式(2)代入公式(3)可得:
$$\hat v = v + \tan \theta (u\sin \phi - w\cos \phi )$$ (4) 式中:
$\tan \theta (u\sin \phi - w\cos \phi )$ 即是$v$ 的估计误差。若风力发电机存在一定偏航,稳定风场条件下$u$ 和$w$ 方向的风速分量基本恒定且不为0,当方位角$\varphi $ 相同时,则风速的测量误差将主要受扫描锥角正切值$\tan \theta $ 的影响,即误差随锥角$\theta $ 的增大而增大。为了提高风速测量精度,文中系统选用了顶角为15°的楔形镜,其光束偏转后的扫描锥角为15°。激光测风系统的扫描装置结构如图3所示,将70 mm口径楔形镜安装于直驱电机中心孔内,并由电机旋转带动实现了光束对大气的扫描。扫描装置中无机械传动部件,结构简单,运行平稳,不易磨损。为了提高系统在外场条件下的可用性,在楔形镜外部还加装了保护玻璃。

图 3 扫描装置结构图
Figure 3. Structure diagram of the scanner
-
扫描测风是通过探测不同径向上的风速并结合扫描方位角度来计算风场信息的。其中,扫描方式、扫描频率和采样频率等参数的设置尤其重要,它们是影响风场反演精度的重要因素。
常用扫描方式有扇形扫描和圆锥扫描,前者是光束每次转过一个固定角度后停止,采样完毕后再继续扫描。扇形扫描过程中,每次停转采样以及电机的启动、制动过程会消耗时间,导致扫描频率大幅降低,测风结果更新较慢,影响偏航控制系统的实时性。圆锥扫描过程中光束旋转连续不间断,扫描频率较高,但由于其信号处理系统是以一定的频率进行离散采样的,也会造成风速测量结果在空间上被平均而存在一定误差。假设某次采样起点是光束旋转角度为
${\phi _s}$ 的时刻,经过频谱的采样和非相干累积楔形镜旋转到了${\phi _s}{\rm{ + d}}\phi $ 位置,则代表${\phi _s}$ 方向的径向风速实际是$({\phi _s}{\text{,}} {\phi _s}{\rm{ + d}}\phi )$ 区间内的平均风速。由于系统没有安装移频设备,因此不具有分辨径向风速正负方向的能力。故实测径向风速分量将随着扫描方位角度增大呈现正弦绝对值的变化规律,如公式(5)所示:
$$\left\{ \begin{array}{l} {v_{los}} = \left| {a\cos \varphi + c} \right| \\ {v_{ver}} = a/\sin \theta \\ {v_{hor}} = c/\cos \theta \\ \end{array} \right.$$ (5) 式中:
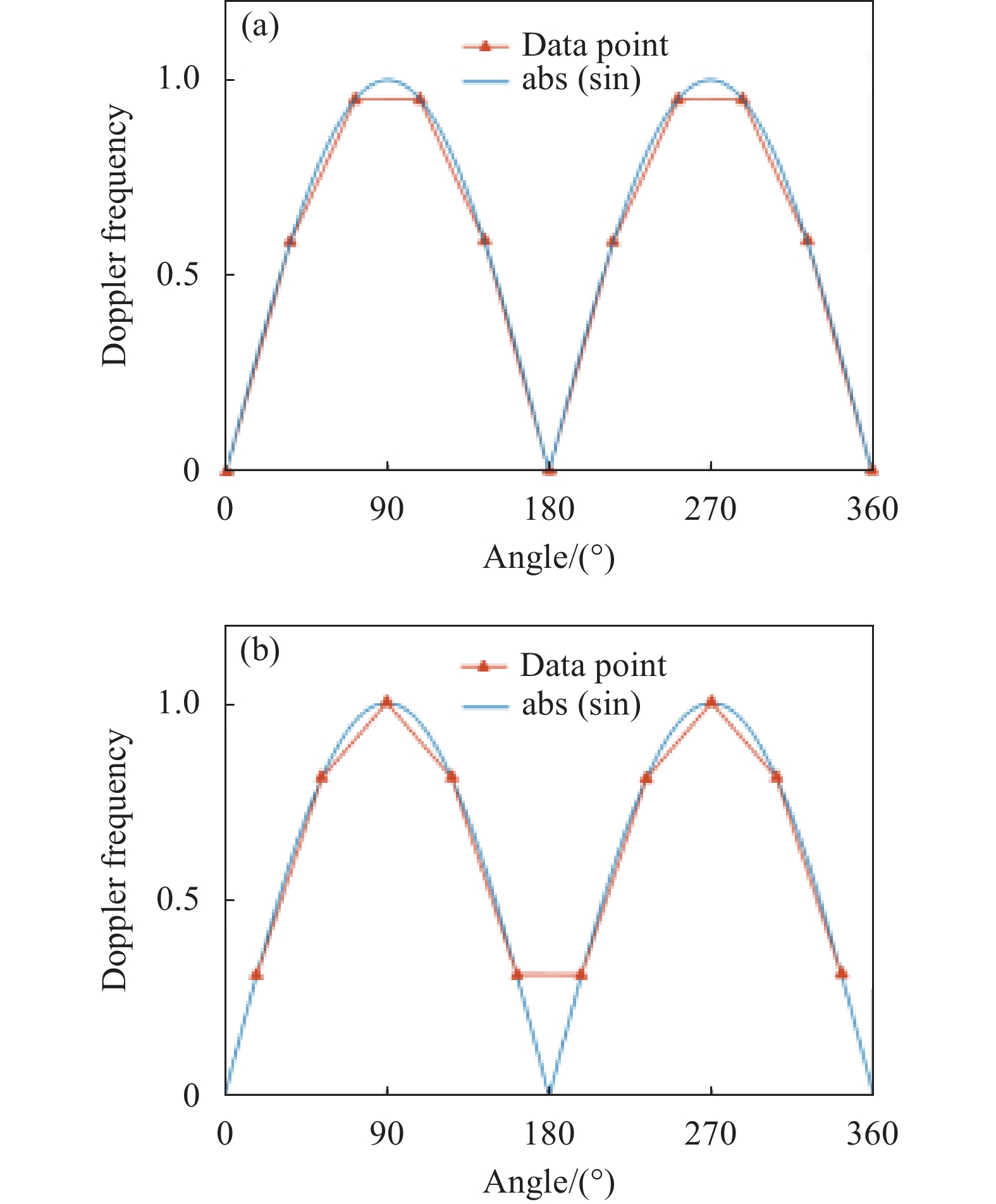
${v_{ver}}$ 和${v_{hor}}$ 分别为风速的垂直分量和水平分量;a和c为正弦拟合参数。设置系统扫描1圈采样10个点,则两点之间旋转步长角度为
${\text{π}} {\rm{/5}}$ ,图4所示为平均效果带来的最大风速处和最小风速处的极限误差。由图4(a)可见,设${\phi _s}{\rm{ = 0}}$ ,则在$\pi {\rm{/2}}$ 和${\rm{3}}{\text{π}} {\rm{/2}}$ 位置所估计的最大风速分别是区间$\left( {{\text{π}} {\rm{/2 - }}{\text{π}} {\rm{/10}}{\text{,}}{\text{π}} {\rm{/2 + }}{\text{π}} {\rm{/10}}} \right)$ 和$\left( {{\rm{3}}\pi {\rm{/2 - }}{\text{π}} {\rm{/10}}{\text{,}}{\rm{ 3}}{\text{π}} {\rm{/2 + }}{\text{π}} {\rm{/10}}} \right)$ 的平均值,因此估计的多普勒频移偏低,反演风速偏小,在此区间内估计误差可表示为: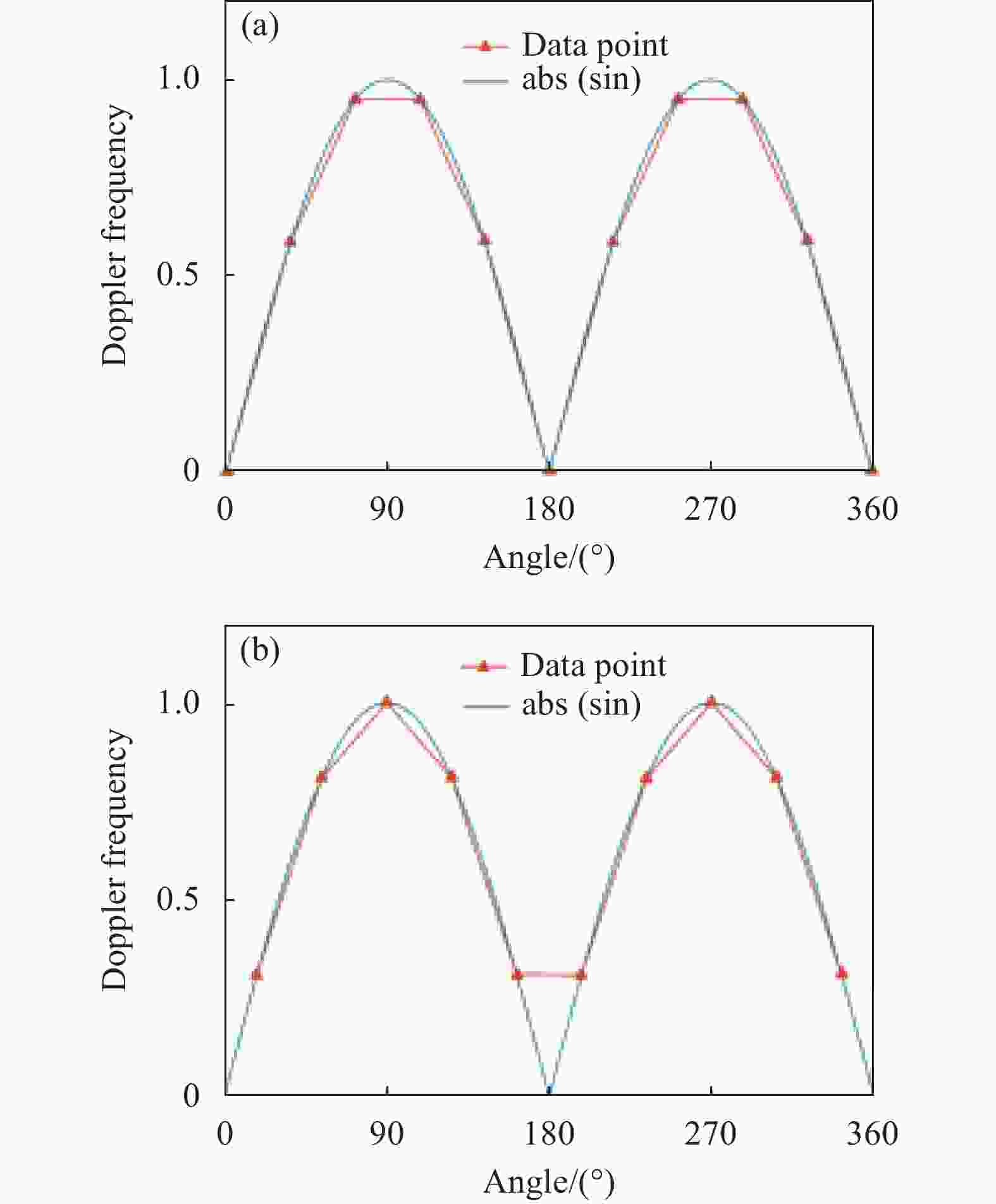
图 4 正弦拟合的估计误差(10采样点/圈)
Figure 4. Estimated errors of sine fitting(10 points per scan)
$${\varepsilon _{\rm{1}}} = \dfrac{{\displaystyle\sum\limits_{i = 1}^n {\left| {\sin {\theta _i}} \right|} }}{n} - \sin \left(\dfrac{\pi }{2}\right)$$ (6) 式中:
${\theta _i}$ 为所求区间内等间距的n个角度值。假设非相干累加次数n为10万次,计算出估计误差为1.64%。由图4(b)可见,若
${\phi _s}{\rm{ = }}\pi {\rm{/10}}$ ,在$\pi $ 位置所估计的最小风速是$\left( {\pi {\rm{ - }}\pi {\rm{/30}}\pi {\rm{ + }}\pi {\rm{/30}}} \right)$ 的平均值,因此估计的多普勒频移偏高,反演风速偏大,在此区间内估计误差可表示为:$${\varepsilon _{\rm{2}}} = \dfrac{{\displaystyle\sum\limits_{i = 1}^n {\left| {\sin {\theta _i}} \right|} }}{n} - \sin (\pi )$$ (7) 式中:
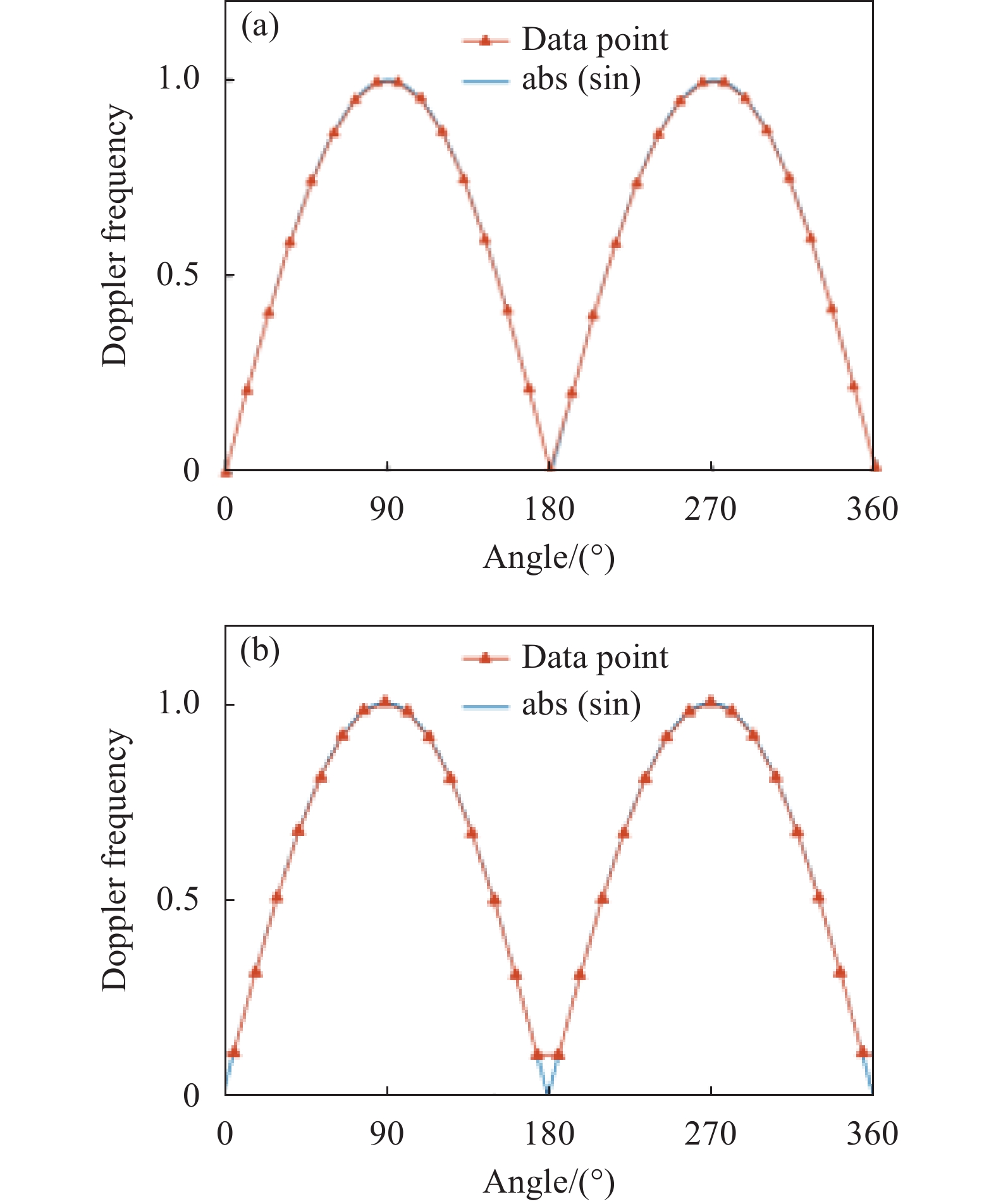
${\theta _i}$ 为所求区间内等间距的n个角度值。非相干累加次数n为10万次时,计算出估计误差达到了15.58%,显然该误差不能忽视。但对于安装了移频器的测风系统,因为所累积的频谱中多普勒频移有正负之分,根据公式(6)计算出的最小风速偏差几乎为零,可以忽略不计。增加每圈的采样点数可以减小平均效果带来的误差。设置系统扫描1圈采样30个点,两点之间旋转步长角度为
${\text{π}} {\rm{/15}}$ 。如图5(a)所示,若${\phi _s}{\rm{ = 0}}$ ,则在${\text{π}} {\rm{/2}}$ 和${\rm{3}}{\text{π}}{\rm{/2}}$ 位置所估计的最大风速分别是区间$\left( {{\text{π}} {\rm{/2 - }}{\text{π}} {\rm{/10}}{\text{,}}{\text{π}} {\rm{/2 + }}{\text{π}} {\rm{/10}}} \right)$ 和$\left( {{\rm{3}}{\text{π}} {\rm{/2 - }}{\text{π}} {\rm{/10}}{\text{,}}{\rm{ 3}}{\text{π}} {\rm{/2 + }}{\text{π}} {\rm{/10}}} \right)$ 的平均值,根据公式(5),其估计误差为0.18%。由图5(b)可见,若${\phi _s}{\rm{ = }}{\text{π}} {\rm{/30}}$ ,在${\text{π}} $ 位置所估计的最小风速是$\left( {{\text{π}} {\rm{ - }}{\text{π}} {\rm{/30}}{\text{,}}{\text{π}} {\rm{ + }}{\text{π}} {\rm{/30}}} \right)$ 的平均值,根据公式(7),其估计误差为5.23%。与每圈10个采样点相比,每圈30个采样点时风速的估计误差已经大大减小。
图 5 激光测风系统的正弦拟合误差(30采样点/圈)
Figure 5. Estimated errors of sine fitting(30 points per scan)
基于连续相干探测技术的激光测风系统在低频区域存在测速盲区,其低风速时的测量结果本身存在较大误差,且过低风速对于风力发电利用价值不大[16]。因此,最小风速处5.23%的相对误差对风力发电产生的影响可以忽略不计。考虑到过多的采样点数对数据处理和存储设备的性能有着更高要求,会增加系统成本,因此选择每圈30个采样点较为合适。
采样频率为
${f_{{\rm{AD}}}}$ 的采集卡对$n$ 次非相干累积数据的采样时间${T_{\rm{s}}}$ 为:$${T_{\rm{s}}} = \dfrac{{n{L_{FFT}}}}{{{f_{{\rm{AD}}}}}}$$ (7) 文中设计的系统中FFT长度
${L_{FFT}}$ 为1 024,累积次数$n$ 为10万,则${T_{\rm{s}}}$ 为0.41 s。由于系统中信号采集和处理可以并行,即两个采样点之间时间间隔大于0.41 s,原则上就不会出现采样数据的覆盖,故文中系统设置扫描一圈的时间为15 s。 -
2020年2月27日18:00~24:00期间,激光测风系统在深圳试验场(22.65 N,113.90 E)开展外场试验。将系统作为地基雷达进行VAD(Velocity Azimuth Display)扫描,并测量水平风速风向。现场如图6所示。

图 6 激光测风系统与气象梯度观测塔
Figure 6. Laser wind measurement system and meteorological gradient observation tower
激光测风系统安装位于深圳市气象梯度观测塔下,两者直线距离约20 m。气象塔上离地高度80 m处装有超声波风速仪,测量风速精度为0.1 m/s,风向精度为1°,其共享的测风数据刷新时间为1 min。外场试验期间,该风速仪的测风结果被用来对比参考,以验证激光测风系统的性能。
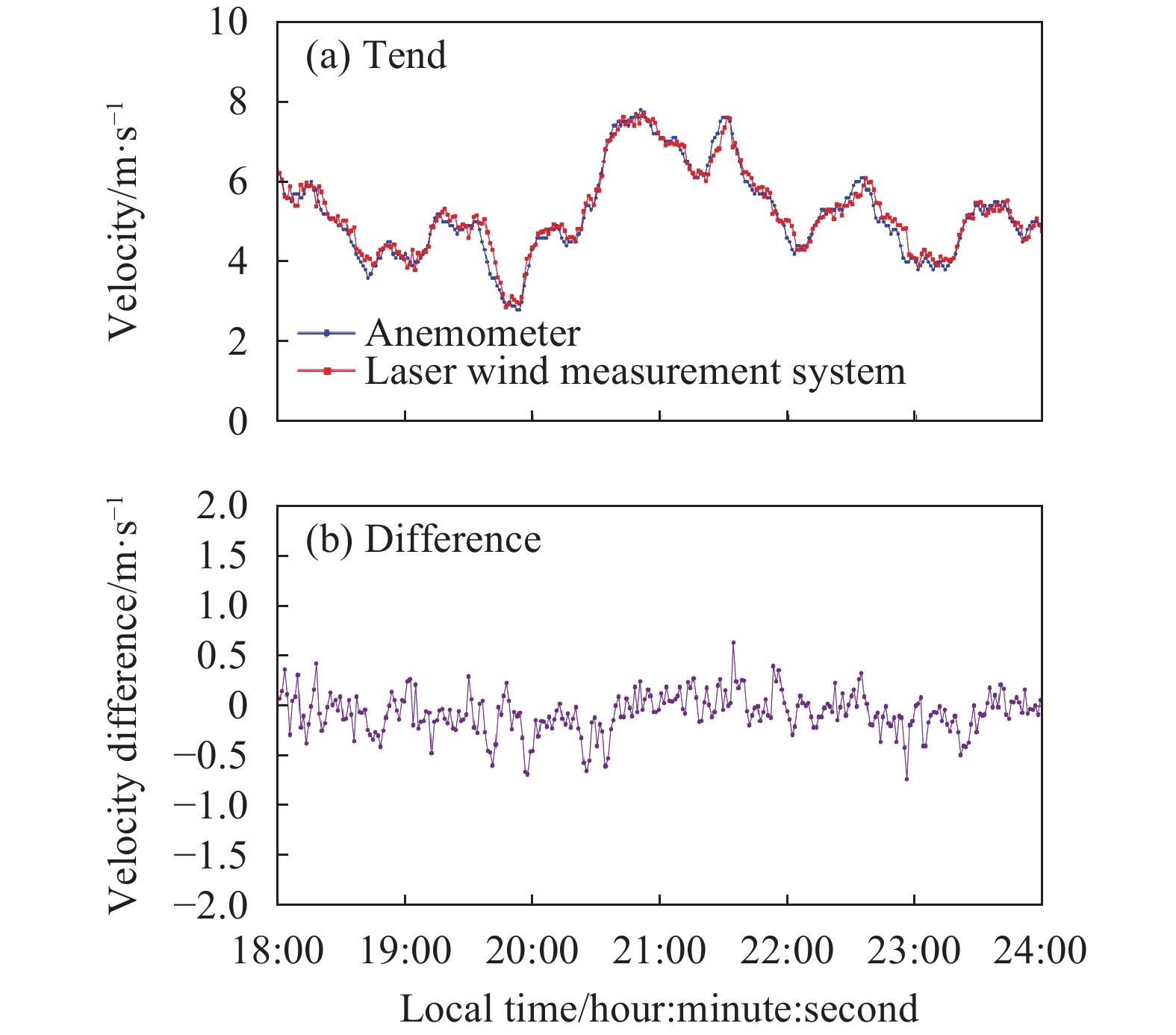
将激光测风系统每1 min内的测量数据求取一次平均值,并与超声波风速仪测量数据在时间上严格对应,用于对比的风向和风速数据均为360组。如图7所示,在相同时间段内,风速对比结果显示,两设备的测风趋势一致性较高,最大偏差为0.73 m/s。

图 7 风速对比 。(a)趋势;(b)差值
Figure 7. Wind velocity comparisons. (a) Trend; (b) difference
如图8所示,在相同时间段内,激光测风系统与超声波风速仪的风向测量结果也基本保持一致,最大偏差为9.96°。由于可能出现的大气不规则运动(湍流、风切变、阵风等)速度较快,而激光扫描一周时间较长,难以及时捕捉该过程中的风场变化。超声波风速仪测量速度较快,对大气的不规则运动的反应更为敏感,这是造成激光测风系统与气象塔的测风数据之间存在差异的原因之一。综合风速风向对比结果可见,在某些风向偏差较大的时刻(如19:43附近和21:36附近),对应的风速偏差也有所增加,这也表明了该误差应当是由不规则的大气运动引起的。若要减小此误差,可以继续增加系统扫描一圈的采样点个数,并缩短数据采样时间,提高系统的时间分辨率。根据公式(7),增大采样频率
${f_{{\rm{AD}}}}$ ,减小FFT长度${L_{FFT}}$ 或减小累积次数$n$ 等方法均可实现采样时间${T_{\rm{s}}}$ 的降低,但这些改变均需要激光测风系统有足够的信噪比作为前提。散粒噪声极限条件下,基于连续相干探测技术的激光测风系统信噪比$S/N$ 可表示为[17]:
图 8 风向对比 。(a)趋势;(b)差值
Figure 8. Wind direction comparisons. (a) Trend; (b) difference
$$S/N = \dfrac{{{\text{π}} {R_d}\eta _R^2{P_T}\varGamma }}{{{q_e}{f_{bin}}}}$$ (9) 式中:
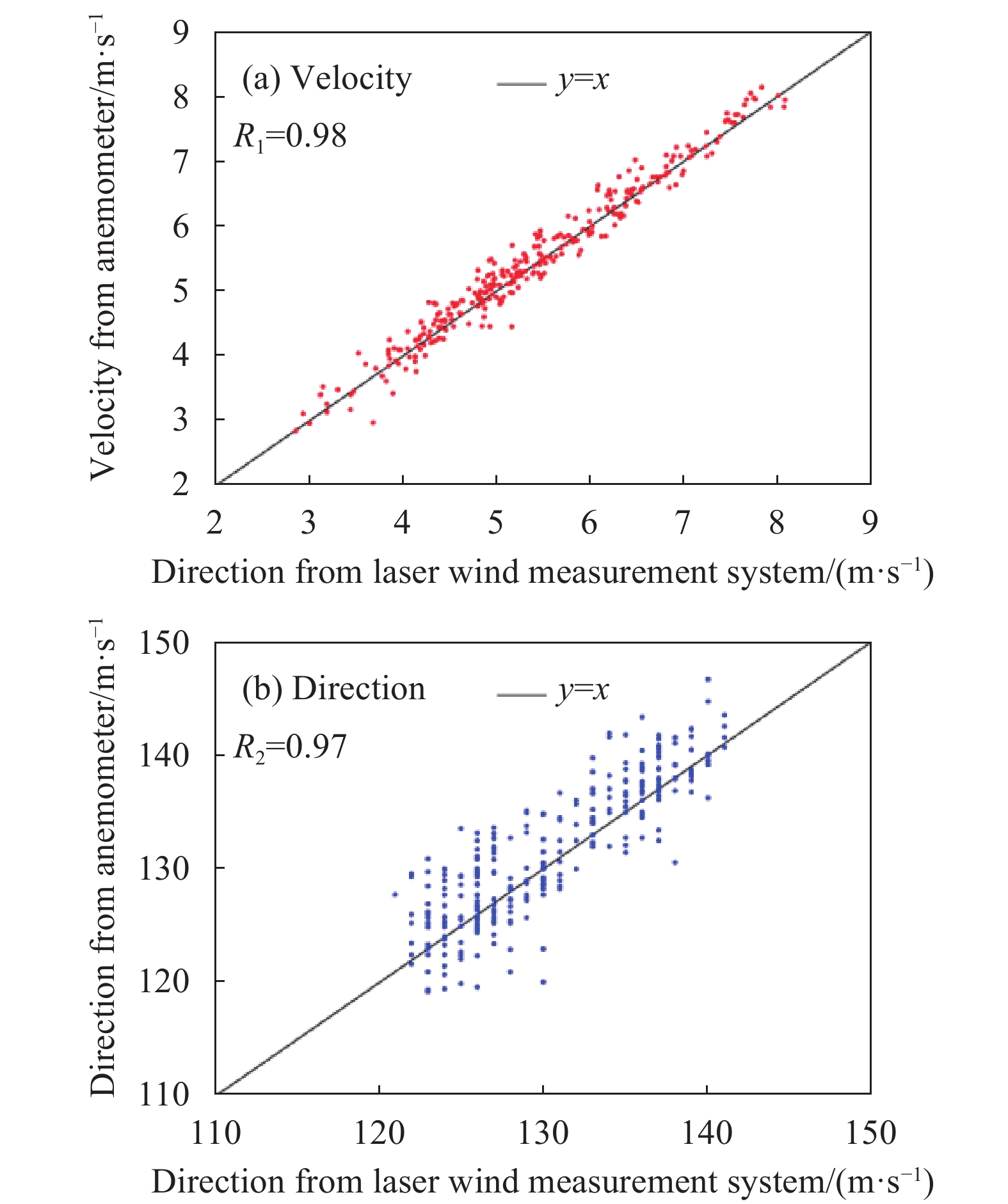
${R_d}$ 为探测器响应度;${\eta _R}$ 为接收机效率;${P_T}$ 为激光器发射功率;${q_e}$ 为电子电荷量;${f_{bin}}{\rm{ = }}{f_{AD}}/{L_{FFT}}$ 为频率最小分辨率;$\varGamma$ 为探测距离内气溶胶的反射系数。增大采样频率${f_{{{AD}}}}$ 和减小FFT长度${L_{FFT}}$ 均会降低系统信噪比,应当通过选用高响应度探测器,提高接收机效率,或适当增大激光器发射功率等手段加以弥补。将对比试验数据进行回归分析和误差分布统计以验证激光测风系统工作性能,结果如图9和图10所示。两设备测量风速数据相关系数R1
为0.98,风向数据相关系数R2为0.97;风速方差σ1为0.22 m/s,风向方差σ2为3.04°,且误差基本符合正态分布,表明激光测风系统工作较为稳定。 
图 9 回归分析 。(a)风速;(b)风向
Figure 9. Regression plot. (a) Velocity; (b) direction

图 10 误差分布 。(a)风速;(b)风向
Figure 10. Error distribution. (a) Velocity; (b) direction
将该误差代入风力发电机发电量计算公式:
$${P_O} = \dfrac{{\rm{1}}}{{\rm{2}}}\rho {A_s}{C_p}{v_i}^3{\cos ^3}\varLambda $$ (10) 式中:
${P_O}$ 为风力发电机从风能中转化的能量;$\rho $ 为空气密度;${A_s}$ 为风轮扫过的面积;${C_P}$ 为风能利用系数;${v_i}$ 为风风速;$\varLambda $ 是风轮平面法线与风向的夹角,即偏航角。计算出文中系统由于风速误差造成的发电量损失约为1.06%,由于风向误差造成的发电量损失约为1.55%。可见,激光测风系统能够为风力发电机提供准确的风场参数,使发电效率获得较大提升。由于此次试验中激光测风系统是作为地基探测系统使用的,测量水平风速时光束的仰角达到了75°,若将其架设到风力发电机上,仰角将减小为15°,其风速测量误差有望进一步缩小,系统精度可获得继续提升。
-
研制了基于相干探测技术的激光测风系统来测量风力发电机的迎风信息。设计了二维扫描装置,通过直驱电机带动15°顶角的楔形镜旋转,实现了测量光束在大气中的圆锥扫描。系统单圈扫描用时15 s,扫描一圈过程中将对30个不同径向进行测速,结合扫描方位角,采用正弦拟合技术计算风速和风向。利用所研制的激光测风系统开展外场试验,与深圳市气象梯度观测塔测风数据进行对比,两设备测得风速数据相关系数为0.98,标准差为0.22 m/s,风向数据相关系数为0.97,标准差为3.04°,这表明了所研制的激光测风系统具有较高的精确性和稳定性。下一步会将此系统安装在风力发电机上,开展迎风信息探测试验,完善其与风力发电机测控系统之间的兼容性。
Design and test of laser wind measurement system for yaw control of wind turbine
-
摘要: 为实现风力发电机迎风信息的精确测量,采用连续波相干探测技术,设计了针对风力发电机偏航控制需求的激光测风系统。该系统的扫描装置中由直驱电机带动15°顶角楔形镜旋转实现激光对大气的圆锥扫描,设置扫描一圈用时为15 s,每圈采样点数为30个,利用正弦拟合方法反演风力发电机前方的风场信息。将激光测风系统安装在深圳市气象观测梯度塔下,与塔上超声波风速仪进行了对比测风试验。经过数据分析,水平风速相关系数达0.98,标准差为0.22 m/s,风向相关系数达0.97,标准差为3.04°,表明所设计的激光测风系统性能优良,工作稳定可靠,能够为风力发电机提供精确风场参数,提高风能的利用效率。Abstract: In order to measure the incoming wind information before it reaches a wind turbine, a laser wind measurement system was developed for need of yaw control of wind turbine based on continuous wave coherence detection. A direct drive(DD) motor was installed in the scanner to drive a wedge lens with 15° vertex angle for laser conical scanning in the atmosphere. The scan period is 15 s, and has 30 sampling points. The sinusoidal fitting method was used to retrieve the velocity and direction of the incoming wind field of wind turbine. The laser wind measurement system was installed under the meteorological gradient observation tower in Shenzhen, and a comparative experiment was carried out with the ultrasonic anemometer on the tower. Measured data were compared and the results are as follows: the correlation coefficient of horizontal wind speed was 0.98 and the standard deviation was 0.22 m/s, the correlation coefficient of wind direction data was 0.97 and the standard deviation was 3.04°. It shows that the laser wind measurement system has satisfactory performance and can provide accurate parameters of wind turbine, which is conducive to improve the efficiency of wind energy utilization.
-
Key words:
- wind measurement /
- wind turbine /
- coherence detection /
- yaw control
-
图 5 激光测风系统的正弦拟合误差(30采样点/圈)
Figure 5. Estimated errors of sine fitting(30 points per scan)
图 6 激光测风系统与气象梯度观测塔
Figure 6. Laser wind measurement system and meteorological gradient observation tower
表 1 激光测风系统关键参数
Table 1. Key parameters of laser wind measurement system
Item Parameters Value Laser Wavelength 1549 nm Linewidth 7 kHz@1549 nm Output power 1 W Telescope Effective aperture 70 mm Waist radius of Guassian beam 1.7 cm Focus distance 80 m Balanced detector 3 dB bandwidth 75 MHz Responsitivity 0.95 A/W A/D converter Sampling rate 250 MHz Sampling precision 14 bit  下载: 导出CSV
下载: 导出CSV
-
[1] Pao L Y, Johnson K E. Control of wind turbines: Approaches, challenges and recent developments [J]. IEEE Control Systems Magazine, 2011, 31(2): 44-62. doi: 10.1109/MCS.2010.939962 [2] Rahman M, Ong Z C, Chong W T, et al. Performance enhancement of wind turbine systems with vibration control: A review [J]. Renewable and Sustainable Energy Reviews, 2015, 51(C): 43-54. [3] Choi D, Shin W, Ko K. Static and dynamic yaw misalignments of wind turbines and machine learning based correction methods using LiDAR Data [J]. IEEE Transactions on Sustainable Energy, 2019, 10(2): 971-982. doi: 10.1109/TSTE.2018.2856919 [4] Marathe N, Swift A, Hirth B, et al. Characterizing power performance and wake of a wind turbine under yaw and blade pitch [J]. Wind Energy, 2015, 19(5): 963-978. [5] Cortina G, Sharma V, Calaf M. Investigation of the incoming wind vector for improved wind turbine yaw adjustment under different atmospheric and wind farm conditions [J]. Renewable Energy, 2017, 101(C): 376-386. [6] Mikkelsen T L, Angelou N, Hansen K, et al. A spinner-integrated wind LiDAR for enhanced wind turbine control [J]. Wind Energy, 2013, 16(4): 625-643. doi: 10.1002/we.1564 [7] Beuth T, Fox M, Stork W. Parameterization of a geometrical reaction time model for two beam nacelle LiDARs[C]// Proc of SPIE, 2015, 9612: 96120J. [8] Hu Q, Rodrigo P J, Pedersen C. Remote wind sensing with a CW diode laser lidar beyond the coherence regime [J]. Optics Letters, 2014, 39(16): 4875-4878. doi: 10.1364/OL.39.004875 [9] Smith M, Wylie S, Woodward A, et al. Turning the tides on wind measurements: The use of Lidar to verify the performance of a meteorological mast[C]// European Wind Energy Conference and Exhibition, 2016: PO 028. [10] Rodrigo P, Christian P. Field performance of an all-semiconductor laser coherent Doppler lidar [J]. Optics Letters, 2012, 37(12): 2277-2279. doi: 10.1364/OL.37.002277 [11] Burchhart T, Gray C, Krishnamurthy R. Evaluation of wind turbine performance using WINDCUBE with FCR™ and WIND IRIS nacelle-mounted LiDARs in complex terrain[C]// European Wind Energy Conference and Exhibition, 2015: PO 025. [12] Simley E, Pao L Y, Frehlich R, et al. Analysis of light detection and ranging wind speed measurements for wind turbine control [J]. Wind Energy, 2014, 17(3): 413-433. doi: 10.1002/we.1584 [13] Mikkelsen T L. On mean wind and turbulence profile measurements from ground-based wind lidars: limitations in time and space resolution with continuous wave and pulsed lidar systems[C]//European Wind Energy Conference and Exhibition, 2009: PO 171. [14] Brinkmeyer E, Waterholter T. Continuous wave synthetic low-coherence wind sensing Lidar: motionless measurement system with subsequent numerical range scanning [J]. Optics Express, 2013, 21(2): 1872-1897. doi: 10.1364/OE.21.001872 [15] 蒋杉, 孙东松, 韩於利, 等. 连续相干激光风速仪设计与测试[J]. 红外与激光工程, 2019, 48(12): 1203008. doi: 10.3788/IRLA201948.1203008 Jiang Shan, Sun Dongsong, Han Yuli, et al. Design and test of laser anemometer based on continuous wave coherence detection [J]. Infrared and Laser Engineering, 2019, 48(12): 1203008. (in Chinese) doi: 10.3788/IRLA201948.1203008 [16] Jiang S, Sun D S, Han Y L, et al. Performance of continuous-wave coherent Doppler lidar for wind measurement [J]. Current Optics and Photonics, 2019, 3(5): 466-472. [17] Hansen R S, Pedersen C. All semiconductor laser Doppler anemometer at 1.55 μm [J]. Optics Express, 2008, 16(22): 18288-18295. doi: 10.1364/OE.16.018288 -

 点击查看大图
点击查看大图
图(10) / 表(1)
计量
- 文章访问数: 604
- HTML全文浏览量: 162
- PDF下载量: 38
- 被引次数: 0

















































































