












-
在空间光学遥感领域,为了获得更加宽广的视野,通常采用扫描系统将入射光范围扩大,以增大地面的视野及相机的幅宽。国内外的光机扫描成像主要有四种方式:45°旋转反射镜扫描、摆镜扫描、双面镜扫描、望远镜整体旋转扫描等[1]。45°旋转反射镜扫描缺点是焦平面有像旋,需要消旋装置,我国的FY-1扫描辐射计,HY-1海洋水色扫描仪,日本的OCTS(Ocean Color and Temperature Scanner)成像仪均为此类;双面镜旋转扫描缺点是扫描镜尺寸较大,且难以观测冷空间,美国的MODIS(Moderate Resolution Imaging Spectroradiometer),我国的中分辨率成像光谱仪均为此类;摆镜扫描缺点是扫描幅宽窄,红外定标困难;而望远镜整体旋转扫描与其它扫描方式相比,具有无像旋、偏振小、望远镜口径小,并且能够在扫描目标范围外加入定标源、有利于在飞行中进行全口径、全光路定标等优点[2-3],我国也正在研制此类新一代海洋水色水温扫描仪,与此同时,基于望远镜整体旋转的高精度扫描控制系统设计是亟需解决的关键技术之一。文中正是基于此研究目标,研究望远镜转速周期性波动的干扰抑制方法。
为了保证成像质量,需要保证望远镜在规定的成像积分时间内转速与探测器的同步脉冲周期匹配,例如,文中讨论的某新一代海洋水温水色仪,像元尺寸为96 μm,积分时间为500 μs,根据成像要求,若要满足配准要求,必须保证在成像驻留时间内望远镜的角度偏差小于1/5像元,对应望远镜的角度误差要求10 ms内≤±7″,对应的速度波动≤0.28%。然而,实际系统中,由于周期性干扰力矩的存在,造成了望远镜周期性的速度波动。干扰力矩主要包括摩擦力矩、电机波动力矩[4-5]等。实验表明这种干扰随着时间的变化而发生改变,参考文献[6]对干扰的机理进行分析,得到干扰在位置域上的特点,其往往表现为旋转角位置的周期函数。为了保证电机的控制精度,需要对这种时变周期性干扰进行抑制。
针对时变周期干扰的抑制,已有大量学者进行研究[7-9],迭代学习控制、重复控制等方法都取得了很好的效果。参考文献[10]采用重复控制降低周期性扰动误差,然而其参数选择对系统的稳定性能有一定影响,参考文献[11]设计了基于模型参考自适应控制来估计伺服系统中的随机摩擦,得到满意的速度控制性能,然而其计算量大,设计复杂难以在星载仪器上得到应用,参考文献[12]设计了基于扰动力矩观测器的永磁同步电机速度控制器,提高电机的速度稳态精度和抗扰动能力,但由于其需要估算系统的加速度,需要对位置编码器进行一阶微分,甚至二阶微分,易引入噪声,从而影响了观测器的估计精度。
针对上述分析,文中针对旋转望远扫描系统展开研究,通过实验分析得到干扰的位置域周期性特性,并提出一种测量交轴电流
${I_q}$ 的干扰力矩采集系统,结合傅里叶理论提取了干扰力矩模型并进行补偿控制来抑制望远镜的周期性速度波动,并对其应用效果进行实验验证。 -
旋转望远镜扫描成像系统通过旋转望远镜连续旋转结合卫星平台的运转实现对目标的二维成像。望远系统组件由扫描轴系组件(含驱动电机、光电码盘、轴承、转轴)和主光学组件(含主镜组件、次镜组件、三镜组件、折转镜组件、遮光罩、挡光板)组成,两组件之间通过主光学支撑框连接。望远镜扫描系统三维图如图1所示。扫描轴系组件通过永磁同步电机直接驱动主光学组件进行360°连续单向匀速扫描,并通过同一转轴上的光电码盘对旋转角度进行测量并反馈给扫描控制器来完成闭环控制。望远镜扫描系统速度均匀性对扫描成像的性能影响主要体现在两方面:一方面,扫描控制精度影响会影响扫描方向上谱段间配准精度;另一方面,若线阵TDI(Time Delay Integration)探测器同步脉冲周期与扫描速度不匹配,会降低相机总体光学传递函数MTF(Modulation Transfer Function)。因此,望远镜扫描系统的速度平稳性尤为重要,将直接影响到相机的成像质量。
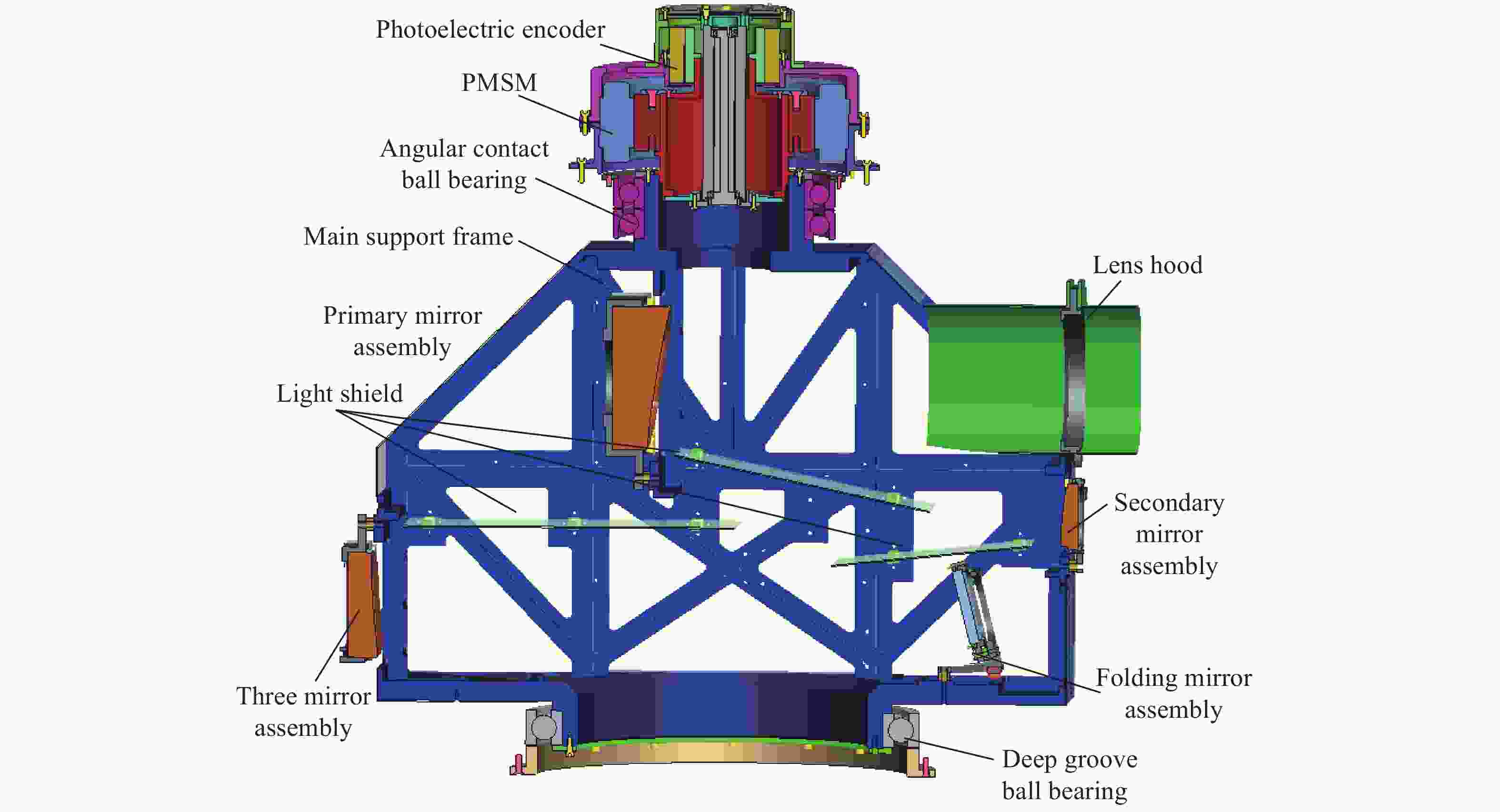
图 1 望远镜扫描系统三维图
Figure 1. Three-dimensional diagram of the telescope scanning system
-
关于望远镜扫描系统这类典型机电伺服系统干扰成分的机理建模已有大量研究成果,具体可参考文献[13-15],干扰的种类复杂,常见的有电机的齿槽力矩波动,制造和装配过程中引起的非理想力矩波动,电磁转矩波动,轴承的摩擦力矩等。为了对干扰力矩的特性进行分析,文中基于上述旋转望远镜扫描系统直接开展实验建模,首先介绍实验平台。
-
实验平台利用模拟负载代替上述主光学组件,系统由控制器、永磁同步力矩电机、模拟负载、光电码盘及其解算电路组成,其中控制器由DSP(Digital Signal Processing)和FPGA(Field Programmable Gate Array)作为核心处理器,FPGA接收光电码盘的角度数据并转发给DSP,DSP生成响应位置指令和速度指令,并在其中断周期内进行位置闭环、速度闭环后产生控制量,送给FPGA生成PWM(Pulse Width Modulation)波信号送入驱动器,由驱动器放大后驱动电机运动,实现闭环。系统的结构框图如图2所示。
图中,
$\omega _n^*$ 为给定的速度信号,${\omega _n}$ 为电机角速度,$\theta $ 为电机机械角度,${T_f}$ 为扰动力矩,${T_e}$ 为驱动力矩,${W_v}(s)$ 为速度环控制器,${W_f}(s)$ 为速度环数字滤波器,${k_{PWM}}$ 为功率放大系数,$L$ 、$R$ 分别为交轴电感和电阻,${U_q}$ 为交轴电压,${I_q}$ 为交轴电流,${K_t}$ 、${K_e}$ 、$J$ 分别为电机的电流力矩系数、反电势系数和转动惯量。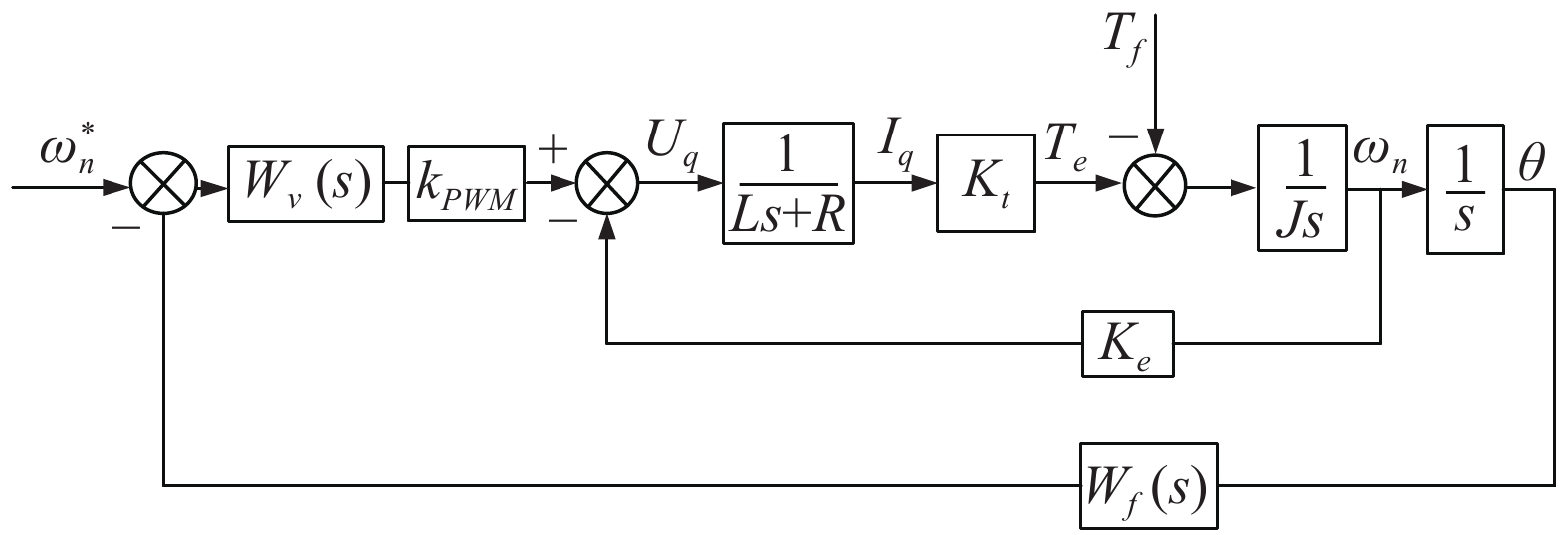
图 2 望远镜速度环数学模型
Figure 2. Model of the telescope speed loop
在给定速度信号和干扰力矩双重输入的作用下,角速度
${\omega _n}$ 可表示为:$${\omega _n} = \frac{{\omega _n^*{W_v}(s){k_{PWM}}{K_t}s - {T_f}(Ls + R)s}}{{J{s^2}(Ls + R) + {K_e}{K_t}s + {W_f}(s){W_v}(s){k_{PWM}}{K_t}}}$$ (1) 当
${W_f}(s) = \dfrac{s}{{{T_v}s + 1}}$ ,${W_v}(s) = {K_p}\left(1 + \dfrac{1}{{{T_i}s}}\right)$ 时,其中${K_p}$ 为PI(Proportion Integral)控制器增益系数,${T_i}$ 为PI控制器积分系数,${T_v}$ 为数字滤波器时间常数,$s$ 为拉普拉斯变换的复频率,由公式(1)可知,当系统进入稳态时,若不考虑干扰力矩${T_f}$ ,根据终值定理,${\omega _n} = \omega _n^*$ ,因此扰动力矩可以通过稳态时的速度输出来反映。 -
实验中,测试系统在不同的恒速指令下运行,其指令速度分别为25、50、75、100、125、150 (°)/s,利用上位机存储角度数据,按照10 ms为间隔计算速度,得到输出如图3(a)~3(f)所示。

图 3 速度输出波形及其FFT分析
Figure 3. Output waveform of speed and the analysis of FFT
对不同恒速下速度输出进行时域FFT(Fast Fourier Transformation)分析,如图3(g)~3(h)所示。从图中可看出,恒速下干扰具有周期性,但在不同速度下干扰周期不同。根据参考文献[4],对于永磁同步单机系统,干扰力矩应为角位置的周期函数。因此,文中引入位置域的概念,定义信号的位置域频率
${f^*}$ 为:$${f^*} = \frac{1}{{{\theta _T}}}$$ (2) 式中:
${\theta _T}$ 为干扰信号的位置周期。在恒速${\omega _n}$ 运行时有:$${f^*} = \frac{1}{{{\omega _n}T}} = \frac{1}{{{\omega _n}}}f$$ (3) 式中:
$T$ 为信号的时间周期;$f$ 为周期$T$ 对应的频率。由公式(3)可知,恒速下位置域频率可由时间域频率通过线性变换获得。从图中可以看出,所有转速下均存在位置域频率分量为
${f^*} = \dfrac{{24}}{{{{360}^{\circ }}}} = 0.066\;7$ 的周期性干扰,即在一个机械圆周内存在24个周期性干扰,由参考文献[5]可知,电机波动力矩主要分为齿槽波动力矩和电磁波动力矩,所选用永磁同步力矩电机极对数为24,因此${f^*}$ 的位置周期与电磁波动力矩相对应。不同恒速下速度信号的时域、位置与频率分析对比如表1所示。由表1可知,不同速度下时间域信号频率随指令速度成倍变化,而位置域信号频率不变,因此,经过实验分析,干扰在机械圆周期上具有周期性特征。
表 1 不同恒速下信号频谱分析
Table 1. Spectrum analysis of signals at different constant speeds
Command velocity/(°)·s−1 Temporal frequency/Hz Spatial frequency/(°) 25 1.709 0.06836 50 3.296 0.06592 75 5.005 0.06674 100 6.714 0.06714 125 8.301 0.06641 150 10.01 0.06674 -
为了估计干扰力矩模型,利用霍尔电流传感器采集电机A,B,C相相电流,并利用FPGA和DSP对其进行采集和转换,建立如图4组成的干扰力矩采集系统。
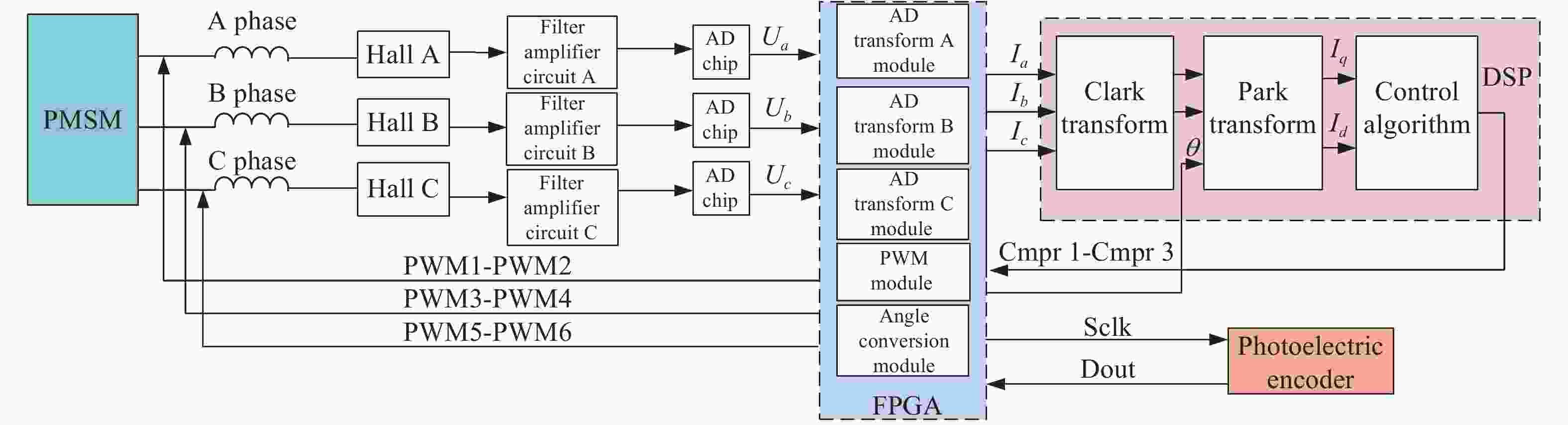
图 4 干扰力矩采集系统
Figure 4. Disturbance torque acquisition system
按照以上硬件搭建干扰力矩采集处理系统,然后通过以下八个步骤可提取与理论分析相符的干扰力矩数学模型:
(1)在电机的A,B,C相绕组中分别串联三支高精度霍尔电流传感器,将A,B,C相相电流信号转换为相电压信号
${U_a}$ ,${U_b}$ ,${U_c}$ ;(2)对电压信号
${U_a}$ ,${U_b}$ ,${U_c}$ 进行有源滤波和放大处理后送入三片AD转换芯片;(3) FPGA生成相应的时序,同时采集三路AD芯片的输出相电流信号
${I_a}$ ,${I_b}$ ,${I_c}$ 和码盘的角度信号$\theta $ ;(4) DSP在控制周期内,采集
${I_a}$ ,${I_b}$ ,${I_c}$ ,$\theta $ 进行自然坐标系到静止坐标系变换和静止坐标系到同步旋转坐标系变换,得到相应的交轴电流${I_q}$ ,直轴电流${I_d}$ ;(5)若没有干扰力矩的影响,望远镜扫描系统跟踪匀速转速信号,其
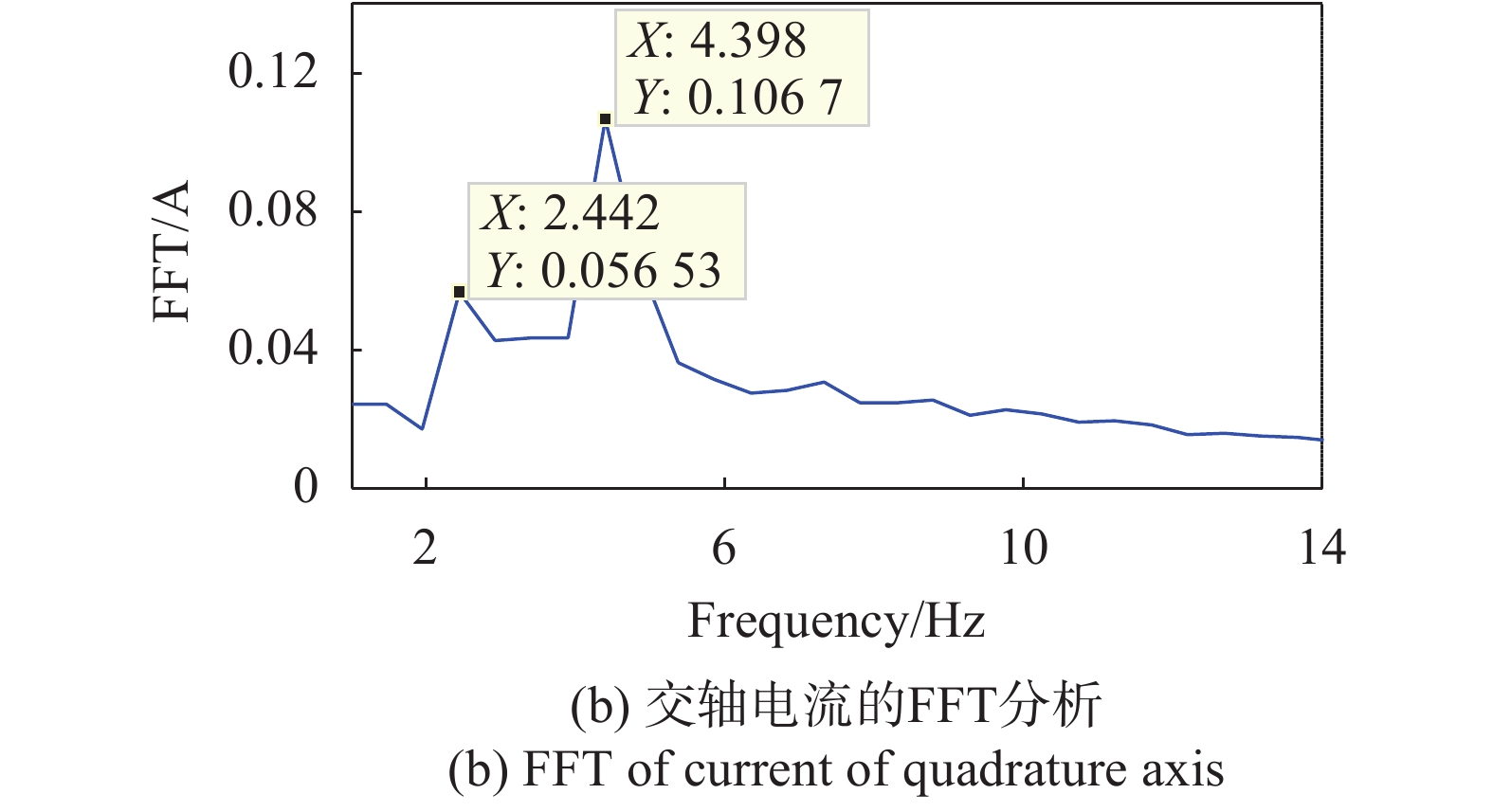
${I_q} = 0$ ,但由于干扰力矩的存在,实测的${I_q}$ 如图5(a)蓝线所示。
图 5 交轴电流信号FFT频谱分析及拟合曲线
Figure 5. Analysis of FFT and fitting curve of current of quadrature axis
${I_q}(s)$ 为幅值,周期固定的周期信号,信号没有间断点,具有有限极大值极小值,并且绝对可积,满足狄利克傅里叶级数条件,因此依据傅里叶理论${I_q}(s)$ 可表示为:$$\begin{split} {I_q}(s) = {a_0} + \displaystyle\sum\limits_{k = 1}^n {({b_k}\sin (k{\omega _0}t + {\mu _k})} + {{c_k}} \cos (k{\omega _0}t + {\mu _k})) \end{split} $$ (4) 式中:
${a_0}$ 为直流系数;${b_k}$ 为正弦分量幅值;${c_k}$ 为余弦分量幅值;${\omega _0}$ 为正余弦分量频率;${\mu _k}$ 为正余弦分量相位。(6)对
${I_q}(s)$ 进行8192点FFT频谱分析,如图5(b)所示。
交轴电流
${I_q}(s)$ 主要包含了两种频率成分:${f_a} = $ $ 2.442\;{\rm{Hz}}$ ,${f_b} = 4.396\;{\rm{Hz}}$ ,且${f_b}$ 的频谱分量最大。(7)对
${I_q}(s)$ 进行一阶曲线拟合,如图5(a)红线所示,可得${I_q}(s)$ 的表达式为:$${I_q}(s) = {a_0} + {b_0}\sin ({\omega _0}\theta ) + {c_0}\cos ({\omega _0}\theta )$$ (5) 式中:
${a_0} = 0.657\;2$ ,${b_0} = 0.124\;6$ ;${c_0} = - 0.028\;82$ ,${\omega _0} = $ $ 23.98$ 。(8)依据图2 中线性系统模型推导干扰力矩
${T_f}(s)$ 的模型:$$\left\{ \begin{array}{l} ( - \theta {W_f}(s){W_v}(s){k_{PWM}} - {\omega _n}{K_e})\dfrac{1}{{Ls + R}} = {I_q} \\ ({I_q}{K_t} - {T_f})\dfrac{1}{{Js}} = {\omega _n} \\ {\omega _n}\dfrac{1}{s} = \theta \\ \end{array} \right.$$ (6) 令输入
$\omega _n^* = 0$ ,${G_1}(s) = \dfrac{1}{{J{s^2}}}{W_f}(s){W_v}(s){k_{PWM}}$ ,${G_2}(s) = $ $ \dfrac{1}{{Js}}{K_e}$ ,${G_3}(s) = \dfrac{1}{{Ls + R}}$ ,则:$$ {T_f} = \frac{{1 + ({G_1}(s) + {G_2}(s)){G_3}(s){K_t}}}{{({G_1}(s) + {G_2}(s)){G_3}(s)}}{I_q} = G(s){I_q} $$ (7) 画出
$G(s)$ 的波特图,找出${\omega _0}$ 频率点对应的幅值A和相角$\alpha $ ,则:$$\begin{split} {T_f}(s) = {b_0}A\sin ({\omega _0}\theta + \alpha ) +{c_0}A\cos ({\omega _0}\theta + \alpha ) \end{split} $$ (8) -
对望远镜扫描过程中产生的周期性速度误差进行控制补偿,过程如下。
首先,在图2所示的望远镜扫描系统反馈回路中设置与角度
$\theta $ 相关的干扰力矩模型${T_f}(\theta )$ 和级联的误差调节器$M(\theta )$ ,$M(\theta )$ 的计算方法可依据系统在输入$\omega _n^* = 0$ 的条件下,加入干扰力矩${T_f}$ 和补偿力矩$T_f^*$ 后,${\omega _n} = 0$ 来进行推导。推导过程如下:$$\begin{split}& [( - \theta {W_f}(s){W_v}(s) + T_f^*){k_{PWM}} - {\omega _n}{K_e}] \cdot \\ & \frac{1}{{Ls + R}}{K_t} - {T_f} = {\omega _n}Js \end{split} $$ (9) 当
${\omega _n} = 0$ 时,公式(9)化简为:$$T_f^* = \frac{{Ls + R}}{{{k_{PWM}}{K_t}}}{T_f}$$ (10) 误差调节器M可以依据实际工程对象对干扰力矩模型的幅值和相位进行微调,补偿框图如图6所示。

图 6 补偿后控制结构框图
Figure 6. Structure diagram of the system after compensation
其次,根据工程经验,通过误差调节器M对干扰力矩模型
${T_f}(\theta )$ 中各正余弦基波函数中的幅值和相位进行迭代修正。然后,通过Matlab对望远镜速度信号进行FFT频谱分析。若谱线幅值分布中不存在固定频率的大点,说明干扰力矩带来的周期性干扰得到了有效抑制。
最后,进行望远镜速度的平稳性测试试验,通过试验数据验证补偿效果是否满足要求。
-
依据图6,系统在输入速度指令
$\omega _n^*$ 和干扰力矩${T_f}$ 的双重输入下,输出${\omega _n}$ 的表达式如下:$$\begin{split} {\omega _n} =& \frac{{\omega _n^*{W_v}(s){k_{PWM}}{K_t}s}}{{J{s^2}(Ls + R) + {K_e}{K_t}s + {W_f}(s){W_v}(s){k_{PWM}}{K_t}}} +\\ &\frac{{{T_f}[M(s){k_{PWM}}{K_t}s - (Ls + R)s]}}{{J{s^2}(Ls + R) + {K_e}{K_t}s + {W_f}(s){W_v}(s){k_{PWM}}{K_t}}} \end{split} $$ (11) 当
$$M(s) = \frac{{Ls + R}}{{{k_{PWM}}{K_t}}}$$ (12) 将公式(12)公式代入(11),可得:
$${\omega _n} = \frac{{\omega _n^*{W_v}(s){k_{PWM}}{K_t}s}}{{J{s^2}(Ls + R) + {K_e}{K_t}s + {W_f}(s){W_v}(s){k_{PWM}}{K_t}}}$$ (13) 由公式(13)可见, 在该补偿方式下,扰动对系统输出的影响完全被前馈控制所补偿,使输出不受扰动的影响,实际上这种补偿为系统输出对扰动实现了完全不变性。且对比公式(11)与公式(1)可知,该补偿控制的引入不改变系统的特征方程和极点的分布,因此不影响系统的稳定性。
-
为了验证上述干扰模型和补偿控制的有效性,搭建了旋转望远镜扫描控制系统,采用了科尔摩根力矩电机KBM-57X02-C直接驱动方式,码盘选用中国科学院光电技术研究所精度为±2.8″的码盘GBJ40SY,扫描装置总质量约45 kg,转动惯量0.78 kg·m2,其标称转速为68 (°)/s,搭建的系统实物图如图7所示。

图 7 旋转望远扫描系统实验系统
Figure 7. Experimental platform of rotating telescope scanning system
图7(a)为望远镜机构,主要包含扫描轴系组件(包含永磁同步力矩电机、光电码盘与轴承),主光学组件(包含主镜、次镜、三镜、折转镜等光学元件),两者间通过主光学支撑框连接。
图7(b)为一套控制系统,主要包含控制器单机,相关电源,上位机和用于调试的仿真机。
为了对周期性速度波动进行有效补偿,在电机的三相绕组A,B,C中各串联一支 513所的霍尔电流传感器HBC-ZN01,其电流分辨率可达1 mA,其响应时间≤1 μs,实验过程如下:
(1)按照3.1节中所述建模过程,首先利用FPGA和DSP每250 μs采集电机相电流
${I_a}$ ,${I_b}$ ,${I_c}$ 及角度信息$\theta $ ,经过Clark变换和Park变换后,得到交轴电流${I_q}$ 关于角度的表达式,并对其进行一阶傅里叶级数拟合,得到${I_q}(\theta )$ 的表达式;(2)依据公式(8)得到干扰力矩模型
${T_f}(\theta )$ ;(3)按照3.2节中所述补偿过程,依据公式(10)得到补偿控制器
$M(\theta )$ ;(4)依据图6,将
$M(\theta )$ 加入原速度环控制器${W_v}(s)$ 后,作为前馈控制对干扰力矩进行完全补偿;(5)利用上位机Labview软件每250 μs采集一次望远镜的实时角度并存储,按照每10 ms的间隔计算望远镜的实时速度;
为了与2.2节实验数据做对比,分别对25、50、75、100 (°)/s四种频率下进行了测试,并对补偿控制和消除前后的速度波动进行了对比,测试结果如下图8(a)-(d)所示。结果如下:

图 8 补偿前后实验测试结果
Figure 8. Experimental results before and after compensation
(1)由图8(a)可知,望远镜在25 (°)/s速度指令条件下进行匀速转动,校正前速度的波动范围为−0.2899~0.2945 (°)/s,校正后速度的波动范围为−0.177~0.1556 (°)/s,下降幅度约39%~47%, 速度波动的方差由0.0152 (°)/s减小至0.0035 (°)/s;
(2)由图8(b)可知,望远镜在50 (°)/s速度指令条件下进行匀速转动,校正前速度的波动范围为−0.2747~0.2533 (°)/s,校正后速度的波动范围为−0.1648~0.1587 (°)/s,下降幅度约40%~37%,速度波动的方差由0.012 (°)/s下降至0.0033 (°)/s;
(3)由图8(c)可知,望远镜在75 (°)/s速度指令条件下进行匀速转动,校正前速度的波动范围为−0.1831~0.2029 (°)/s,校正后速度的波动范围为−0.1234~0.1602 (°)/s,下降幅度约32%~21%,速度波动的方差由0.0053 (°)/s下降至0.0018 (°)/s;
(4)由图8(d)可知,望远镜在100 (°)/s速度指令条件下进行匀速转动,校正前速度的波动范围为−0.2930~0.2029 (°)/s,校正后速度的波动范围为−0.2167~0.1694 (°)/s,下降幅度约27%~17%,速度波动的方差由0.0067 (°)/s下降至0.0039 (°)/s。
数据整理如表2所示。可以看出,在各个转速下,补偿前后的速度波动均得到了大幅下降,且速度25 (°)/s和50 (°)/s条件下降幅较大,而75 (°)/s和100 (°)/s条件下降幅较小,原因可由图3看到,在后两者转速条件下,速度误差在位置域频谱中除含0.0667°的较大分量以外,在低频处也有较大影响的频率分量,而在实验中仅对频率分量0.0667°进行了校正,若对其他影响较大的位置域频率分量也进行校正,将得到更好的实验效果。
为了验证系统的性能是否满足引言中所述技术要求,又在68 (°)/s的标称转速下进行了测试,测试结果如图8(e)~8(f)所示,由图8(e)可知,校正前望远镜每10 ms角度误差值≤±8″,校正后望远镜每10 ms角度误差值≤±5.5″,满足技术要求≤±7″,角度误差减小31.3%;由图8(f)可知,校正前望远镜速度波动≤0.35%,校正后望远镜速度波动≤0.23%,满足技术要求≤0.28%,速度波动减小34.3%。
表 2 不同转速下补偿结果对比
Table 2. Comparison of compensation results at different speeds
Speed
command/(°)·s−1Speed fluctuation Speed variance Before compensation/(°)·s−1 After compensation/(°)·s−1 Decrease Before compensation/(°)·s−1 After compensation/(°)·s−1 Decrease 25 −0.290-0.294 −0.177-0.156 39%-47% 0.0152 0.0035 77% 50 −0.275-0.253 −0.165-0.159 37%-40% 0.012 0.0033 72% 75 −0.183-0.203 −0.123-0.160 21%-32% 0.0053 0.0018 66% 100 −0.293-0.203 −0.217-0.169 17%-27% 0.0067 0.0039 42% -
文中针对旋转望远镜扫描系统转速周期性波动问题,通过实验研究验证了干扰力矩的存在,确定了其频率成分。针对时变周期干扰在位置域上的周期性特征,利用交轴电流提取干扰力矩模型,并在速度回路中设置控制补偿器对干扰力矩进行完全补偿。实验结果显示,该干扰力矩补偿方法对周期性干扰有很好的抑制能力,该方法可在系统各个转速下有效抑制干扰。引入补偿控制后,望远镜速度波动减小30%以上。
实验结果表明:基于位置域的前馈补偿控制方法能够有效抑制旋转望远扫描镜中存在的时变周期干扰,满足其高精度速度稳定性要求,在不影响系统稳定性能的同时提高了系统的精度。
Periodic disturbance suppression method in position domain for rotating telescope
-
摘要: 为了抑制周期性干扰信号对旋转望远镜扫描系统速度平稳性和成像效果的影响,通过建立干扰力矩模型和误差补偿器,对系统进行了干扰补偿控制。首先,通过实验得到周期性干扰信号具有角位置域定周期的特征;其次,通过测量交轴电流
${I_q}$ 建立了一套基于傅里叶理论的干扰力矩模型采集系统,并通过八个步骤提取了干扰力矩模型的具体表达式;然后,依据提取的干扰力矩表达式,分四个步骤对系统周期性误差进行补偿控制;最后,通过实际系统来验证控制补偿的有效性。实验结果表明,望远镜在68 (°)/s的转速下运行时,每10 ms角度误差可降低至±5.5″以内,降低幅度30%以上,能够满足成像系统角度误差≤±7″的要求,速度稳定度得到了明显改善。Abstract: In order to suppress influence of the periodic interference signal’s fluctuation on the rotating telescope scanning system speed stability and imaging effect, the interference compensation control was carried out by establishing the interference torque model and error compensator. Firstly, it was obtained that the periods of the disturbances were time-varying but position-fixed through experiment. Secondly, by measuring the current of quadrature axis${I_q}$ , a set of disturbance torque model acquisition system based on Fourier theory was established, and the specific expression of the disturbance torque model was extracted through eight steps. Then, the periodic error was compensated according to the expressions through four steps. Finally, the effectiveness of control compensation was verified by the actual system. The experimental results show that angle error of the telescope can be reduced to less than ±5.5″ of the angle error every 10 ms when the telescope is running at the speed of 68 (°)/s, and the reduction amplitude is more than 30%, which can meet the requirement of ±7″, and the speed stability is greatly improved.-
Key words:
- rotating telescope /
- speed stability /
- disturbance suppression /
- scanning system
-
图 5 交轴电流信号FFT频谱分析及拟合曲线
Figure 5. Analysis of FFT and fitting curve of current of quadrature axis
图 7 旋转望远扫描系统实验系统
Figure 7. Experimental platform of rotating telescope scanning system
表 1 不同恒速下信号频谱分析
Table 1. Spectrum analysis of signals at different constant speeds
Command velocity/(°)·s−1 Temporal frequency/Hz Spatial frequency/(°) 25 1.709 0.06836 50 3.296 0.06592 75 5.005 0.06674 100 6.714 0.06714 125 8.301 0.06641 150 10.01 0.06674  下载: 导出CSV
下载: 导出CSV
表 2 不同转速下补偿结果对比
Table 2. Comparison of compensation results at different speeds
Speed
command/(°)·s−1Speed fluctuation Speed variance Before compensation/(°)·s−1 After compensation/(°)·s−1 Decrease Before compensation/(°)·s−1 After compensation/(°)·s−1 Decrease 25 −0.290-0.294 −0.177-0.156 39%-47% 0.0152 0.0035 77% 50 −0.275-0.253 −0.165-0.159 37%-40% 0.012 0.0033 72% 75 −0.183-0.203 −0.123-0.160 21%-32% 0.0053 0.0018 66% 100 −0.293-0.203 −0.217-0.169 17%-27% 0.0067 0.0039 42%
下载: 导出CSV
-
[1] 刘云芳. 旋转望远镜扫描机构控制技术研究[D]. 上海: 上海技术物理研究所, 2013. Liu Yunfang. The study of Rotating telescope scanning mechanism control technology[D]. Shanghai: Shanghai Institute of Technical Physics Chinese Academy of Sciences, 2013. (in Chinese) [2] 杨哲辉. 离轴反射望远镜整体旋转扫描机构设计研究[D]. 上海: 中科院上海技术物理研究所, 2017. Yang Zhehui. Research on scanning mechanism design for off-axis three mirror telescope overall rotation[D]. Shanghai: Shanghai Institute of Technical Physics Chinese Academy of Sciences, 2017. (in Chinese) [3] Hook S B, Mc C R. The calib ration and validation of sea WiFS data [J]. Progress in Oceanography, 2000, 45: 427-465. doi: 10.1016/S0079-6611(00)00012-4 [4] Gebregergis A, Chowdhury M H, Islam M S, et al. Modeling of permanent magnet synchronous machine including torque ripple effects [J]. IEEE Transactions on Industry Application, 2015, 51(1): 232-239. doi: 10.1109/TIA.2014.2334733 [5] Ransara H K S, Madawala U K. A torque ripple compensation technique for a low-cost brushless DC motor drive [J]. IEEE Transactions on Industrial Electronics, 2015, 62(10): 7171-6182. [6] Huo Xin, Tong Xingang, Liu Kangzhi, et al. A compound control method for the rejection of spatially periodic and uncertain disturbances of rotary machines and its implementation under uniform time sampling [J]. Control Engineering Practice, 2016, 53: 68-78. doi: 10.1016/j.conengprac.2016.05.001 [7] Hao S, Liu T, Paszke W, et al. Robust iterative learning control for batch processes with input delay subject to time-varying uncertainties [J]. Iet Control Theory & Applications, 2016, 10(15): 1904-1915. [8] Nguyen D H, Banjerdpongchai D. Robust iterative learning control for linear systems with time-varying parametric uncertainties [C]//Proceedings of the IEEE Conference on Decision and Control, 2009: 428-433. [9] Steinbuch M. Repetitive control for systems with uncertain period-time [J]. Automatica, 2002, 38(12): 2103-2109. doi: 10.1016/S0005-1098(02)00134-6 [10] Guo Lanjie, Ma Wenpo, Wang Chun, et al. Design of translating optical path scanning control system for Fourier spectrometer [J]. Infrared and Laser Engineering, 2020, 49(1): 0105002. (in Chinese) [11] Li Hao, Zhang Zhenchao, Li Guoping, et al. Active disturbance rejection control of position actuator system for segmented mirror telescope [J]. Infrared and Laser Engineering, 2019, 48(2): 0218005. (in Chinese) [12] Deng Yongting, Li Hongwen, Liu Jing, et al. Low-speed control of large telescope based on disturbance torque observer [J]. Optics and Precision Engineering, 2017, 25(10): 2636-2644. (in Chinese) doi: 10.3788/OPE.20172510.2636 [13] Huo Xin, Wu Aijing, Wang Mengyu, et al. Time-varying periodic disturbance suppression of laser seeker testing system based on spatial iterative learning control [J]. Infrared and Laser Engineering, 2019, 48(9): 0913002. (in Chinese) [14] Duan Qingtao, Zhou Yangzhong, Qu Aiwen, Open-circuit fault-tolerant direct torque control with Low torque ripple for six-phase and three-phase PMSM series-connected system[C]//Proceeding of the CSEE, 2019, 39(2):347-358. (in Chinese) [15] Li Yaohua, Meng Xiangzhen, Shi Haohao, et al. Direct torque control system of surface Permanent Magnet Synchronous Motor based on bivariate predictive control [J]. Motor and Control Application, 2019, 46: 15-20. (in Chinese) doi: 10.3969/j.issn.1673-6540.2019.06.003 -

 点击查看大图
点击查看大图

计量
- 文章访问数: 461
- HTML全文浏览量: 159
- PDF下载量: 21
- 被引次数: 0





















































































































