












-
温度和湿度是地球大气的重要状态变量。同时温度还是常规观测的气象参数之一[1],是引起城市热岛效应的主要原因[2]。激光雷达技术具有高时空分辨率以及能连续观测温湿度廓线的优点。目前大气温度观测的激光雷达主要有转动拉曼激光雷达和高光谱分辨率激光雷达。高光谱分辨率激光雷达对系统的稳定性要求更高,而且很难充分抑制米散射信号;而转动拉曼激光雷达结合最新的干涉滤光片,即使在有云的情况下也能进行温度探测[3]。水汽探测的激光雷达技术主要有差分吸收激光雷达和拉曼激光雷达。差分吸收激光雷达的优点是能够自校准且有更高的探测精度,但是发射机复杂[4]。拉曼激光雷达需要外部校准且白天探测的精度相对于差分吸收激光雷达更低,但是发射机简单[4]。
2002 年,Behrendt等人在日本空间和大气无线电科学中心(RASC)搭建了同步探测温度、湿度等大气参量的拉曼激光雷达系统,可以实现11 km 以下大气温、湿度廓线、气溶胶光学参数廓线的同步探测[5]。2004年,I. Balin等人在瑞士联邦工程学院空气和土壤实验室(LPAS)研发了多波长拉曼-米散射激光雷达系统,使用双光栅多色仪作为分光器件,可以同步探测大气温度、湿度和气溶胶光学参数,大气水汽的探测高度达10 km以上[6]。2015年,Hammann等人在德国霍恩海姆大学研制了一台拉曼激光雷达系统,实现了大气温度、水汽、以及气溶胶光学参数的全天时观测[4],白天观测温度不确定度在1020 m以下小于1 K[7]。2015 年,西安理工大学王玉峰等人设计了一台转动-振动拉曼激光雷达系统,在10 km以下温度的探测误差小于1 K,相对湿度不确定度小于10%[8]。2020年,中国科学院安徽光学精密机械研究所研制了一台多功能拉曼激光雷达,可以同时观测大气温度、水汽和气溶胶,在天气晴好的情况下,6.2 km高度以下的夜间统计温度误差小于1 K[9]。
针对拉曼温湿度廓线激光雷达白天探测精度较低的问题,文中设计了一台使用收发合置望远镜的拉曼激光雷达系统并对系统的探测性能进行了仿真。由于收发合置的望远镜减小了系统的接收视场角,仿真结果表明系统白天探测的性能得到了提升。
-
拉曼激光雷达利用转动拉曼技术反演大气温度廓线[10]。在转动拉曼测温激光雷达技术的研究中,通常认为空气是N2和O2的恒定混合物,不考虑其他气体,此假设在湿度探测原理中也适用[11]。激光波长为354.8 nm时,
${\rm N_2}$ 和${\rm O_2}$ 分子的纯转动拉曼光谱图如图1所示。由于${\rm N_2}$ 和${\rm O_2}$ 的斯托克斯谱线受到大气荧光的影响[11],因此通常选用反斯托克斯谱线反演大气温度。转动拉曼测温就是依据${\rm N_2}$ 和${\rm O_2}$ 的纯转动拉曼谱线强度的温度依赖性[10],从拉曼光谱高低转动量子数位置各提取一部分,这两部分的比值是一个只与温度有关的函数,由此可以反演大气温度。转动拉曼通道探测到的光子数可由公式(1)计算得到[11]:$$\begin{split} {S_{RR}}\left( {{\textit{z}},T} \right) =& {S_0}\eta \frac{{AO\left( {\textit{z}} \right)}}{{{{\left( {{\textit{z}} - {{\textit{z}}_0}} \right)}^2}}}\Delta {\textit{z}}N\left( {\textit{z}} \right)\times\\ &\left[ {\sum\limits_{i = {\rm O_2},{\rm N_2}} {\sum\limits_{{J_i}} {f\left( {{\lambda _{{J_i}}}} \right){\varepsilon _i}} \left( {\frac{{{\rm{d}}\sigma }}{{{\rm{d}}\varOmega }}} \right)_\pi ^{RR,i}\left( {{J_i},T} \right)} } \right] \times {\tau _{{\rm atm}}}{\left( {{{\textit{z}}_0},{\textit{z}}} \right)^2} \end{split}$$ (1) 式中:
${S_0}$ 为激光器发射的光子数;$\eta $ 为探测效率;$A$ 为望远镜的受光面积;$O\left( {\textit{z}} \right)$ 为重叠因子;$\Delta {\textit{z}}$ 为距离分辨率;$N\left( {\textit{z}} \right)$ 为大气分子数密度;$f\left( {{\lambda _{{J_i}}}} \right)$ 为干涉滤光片在转动拉曼谱线${\lambda _{{J_i}}}$ 波长处的透过率;${\varepsilon _i}$ 为大气中${\rm N_2}$ 和${\rm O_2}$ 各自所占的体积比;$\left( {\dfrac{{{\rm d}\sigma }}{{{\rm d}\varOmega }}} \right)_\pi ^{RR,i}\left( {{J_i},T} \right)$ 为微分散射截面;${\tau _{\rm atm}}{\left( {{{\textit{z}}_0},{\textit{z}}} \right)^2}$ 为大气往返透过率。公式(2)是由单支谱拉曼激光雷达推导得到的[12]。对于在一个转动拉曼通道提取多条拉曼谱线的拉曼激光雷达系统来说,在探测高度只有几千米时,公式(2)依然可以使用[4]:
$$Q\left( T \right) = \frac{{{S_{RR2}}}}{{{S_{RR1}}}} = \exp \left( {\frac{a}{T} + b} \right)$$ (2) 式中:
${S_{RR1}}$ 和${S_{RR2}}$ 分别为低高转动量子数拉曼通道的回波信号;a为可由拉曼理论推出的常数值;b与两个拉曼通道系统参数的比值有关。由公式(2)可得:$$T{\rm{ = }}\frac{{a}}{{\ln \left( Q \right) - {b}}}$$ (3) 温度不确定度
$\Delta T$ 可由公式(4)表示:$$\Delta T = \frac{{\partial T}}{{\partial Q}}Q\sqrt {\frac{{{S_{RR1}} + {S_{B1}}}}{{{S_{RR1}}^2}} + \frac{{{S_{RR2}} + {S_{B2}}}}{{{S_{RR2}}^2}}} $$ (4) 式中:
${S_{B1}}$ 和${S_{B2}}$ 分别为低高转动量子数通道的背景信号。
图 1 N2和O2的纯转动拉曼光谱
Figure 1. Pure rotational Raman spectrum of N2 and O2
-
水汽在大气中的含量大约在0.1%~4%之间[13]。同一高度相同体积内水汽质量和干空气质量之比即为水汽混合比[14]。水汽混合比随高度的变化可由公式(5)表示:
$$w\left( {\textit{z}} \right) = \frac{{{n_H}\left( {\textit{z}} \right)}}{{{n_{\rm dry}}\left( {\textit{z}} \right)}}\frac{{{M_H}}}{{{M_{\rm dry}}}}$$ (5) 式中:
${n_H}\left( {\textit{z}} \right)$ 和${n_{\rm dry}}\left( {\textit{z}} \right)$ 为水汽和干空气的密度;${M_H}$ 和${M_{{\rm{dry}}}}$ 为水汽和干空气的分子量。由于大气中N2大约占空气总量的78%且含量非常稳定,所以可以通过探测水汽和N2的振动拉曼回波信号来反演水汽混合比[14]:$$w\left( {\textit{z}} \right) = {C_w}\Delta _q^w\left( {{{\textit{z}}_0},{\textit{z}}} \right)\frac{{{S_H}\left( {\textit{z}} \right)}}{{{S_{{\rm N_2}}}\left( {\textit{z}} \right)}}$$ (6) 式中:
${C_w}$ 为校准常数;$\Delta _q^w\left( {{{\textit{z}}_0},{\textit{z}}} \right)$ 为大气透过率的修正函数;${S_H}\left( {\rm{{\textit{z}}}} \right)$ 和${S_{{\rm N_2}}}\left( {\rm{{\textit{z}}}} \right)$ 分别为水汽和N2的振动拉曼回波信号。水汽混合比的统计误差可由公式(7)计算:
$$\Delta w = {C_w} \times \frac{{{S_H}\left( {\textit{z}} \right)}}{{{S_{{\rm N_2}}}\left( {\textit{z}} \right)}}\sqrt {\frac{{{S_H}\left( {\textit{z}} \right) + {S_{BH}}\left( {\textit{z}} \right)}}{{{S_H}{{\left( {\textit{z}} \right)}^2}}} + \frac{{{S_{{\rm N_2}}}\left( {\textit{z}} \right) + {S_{B{\rm N_2}}}\left( {\textit{z}} \right)}}{{{S_{{\rm N_2}}}{{\left( {\textit{z}} \right)}^2}}}} $$ (7) 式中:
${S_{BH}}\left( {{{\textit{z}}}} \right)$ 和${S_{B{\rm N_2}}}\left( {{{\textit{z}}}} \right)$ 为水汽和N2通道的背景信号。 -
大多数拉曼激光雷达系统工作在354.8 nm或532 nm。假设532 nm和354.8 nm激光器能量相同,且根据工程实际假设532 nm拉曼激光雷达的接收机效率是354.8 nm的2倍。下面通过仿真简单分析354.8 nm和532 nm拉曼激光雷达的探测性能。纯转动拉曼通道回波光子数的比值如公式(8)所示:
$$ \begin{split} &\dfrac{{{S_{RR}}\left( {532,J} \right)}}{{{S_{RR}}\left( {354.8,J} \right)}} =\\ &\dfrac{{{{{\rm{d}}\sigma } /{{\rm{d}}\varOmega \left( {532} \right)}}}}{{{{{\rm{d}}\sigma } /{{\rm{d}}\varOmega \left( {354.8} \right)}}}}{\left( {\dfrac{{\tau \left( {532} \right)}}{{\tau \left( {354.8} \right)}}} \right)^2}\dfrac{{\eta \left( {532} \right)}}{{\eta \left( {354.8} \right)}}\dfrac{{{S_0}\left( {532} \right)}}{{{S_0}\left( {354.8} \right)}}\approx \\ & {\rm{ }}0.2 \times {\left( {\dfrac{{\tau \left( {532} \right)}}{{\tau \left( {354.8} \right)}}} \right)^2} \times 2 \times 1.5\approx \\ &0.6 \times {\left( {\dfrac{{\tau \left( {532} \right)}}{{\tau \left( {354.8} \right)}}} \right)^2} \\ \end{split} $$ (8) 式中:
${S_{RR}}\left( {\lambda_i,J} \right)$ 为纯转动拉曼通道探测到的光子数;${{{\rm{d}}\sigma } /{{\rm{d}}\varOmega \left( {\lambda_i} \right)}}$ 为纯转动拉曼单根谱线的微分散射截面;$\tau \left( {\lambda_i} \right)$ 为大气透过率;$\eta \left( {\lambda_i} \right)$ 为接收机效率;${S_0}\left( {\lambda_i} \right)$ 为激光器发射的光子数。大气透过率由美国1976标准大气模型[15]计算得到。
${{{S_{RR}}\left( {532,J} \right)} /{{S_{RR}}\left( {354.8,J} \right)}}$ 随高度变化的曲线如图2(a)所示。从图中可以看出:大约在4500 m以下,354.8 nm拉曼激光雷达的信号强度更大,在4500 m以上,532 nm的信号强度更大。因此,532 nm更适合对流层上层和平流层的温度探测,354.8 nm更适合低对流层的温度探测。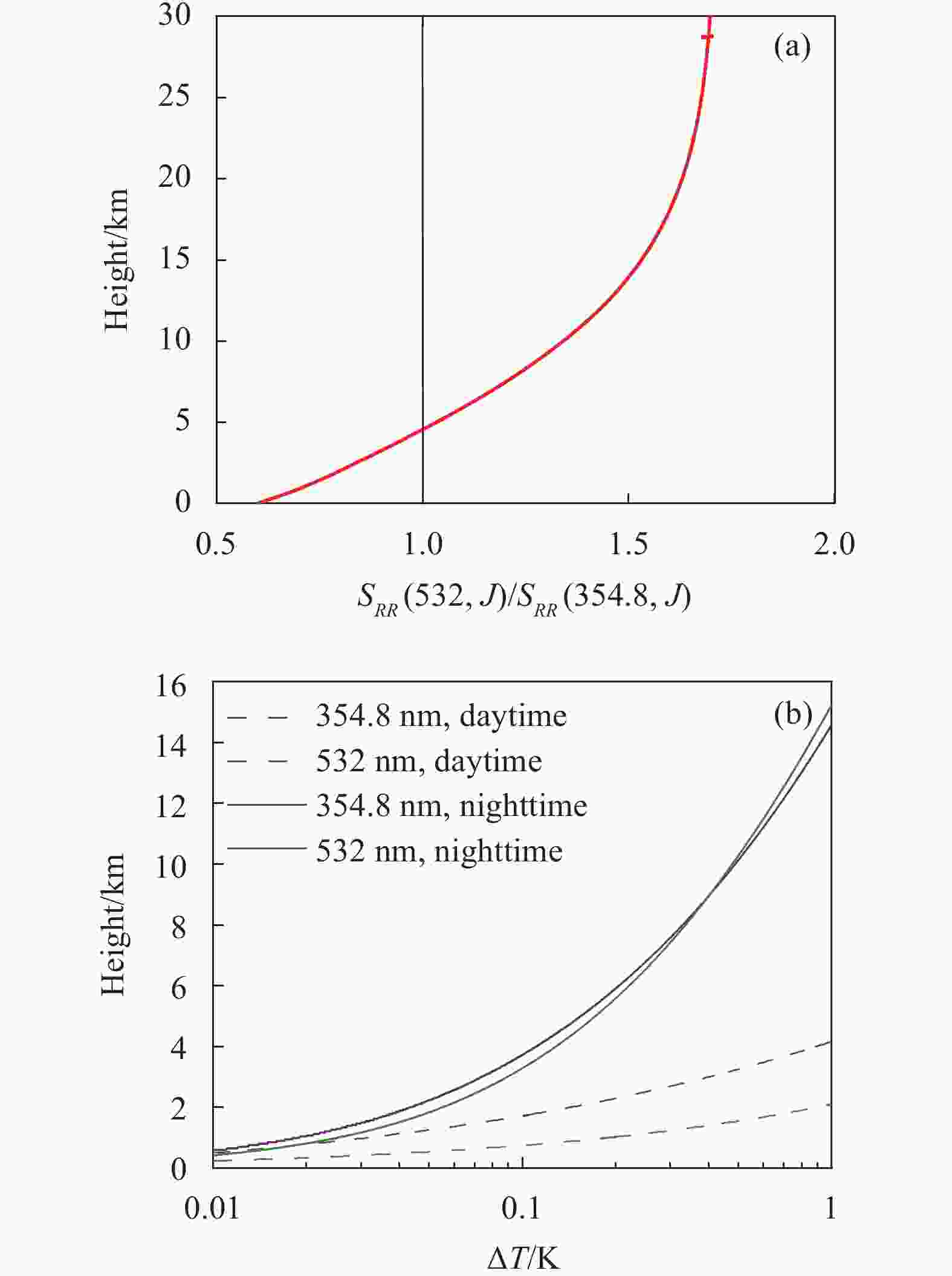
图 2 (a)转动拉曼回波信号强度之比
${{{S_{RR}}\left( {532,J} \right)} /{{S_{RR}}\left( {354.8,J} \right)}}$ ;(b) 532 nm和354.8 nm拉曼激光雷达系统温度不确定度的比较Figure 2. (a) Ratio of rotational Raman echo signal intensities
${{{S_{RR}}\left( {532,J} \right)}} / $ $ { {{S_{RR}}\left( {354.8,J} \right)}}$ ; (b) Comparison of statistical temperature uncertainty between 532 nm and 354.8 nm Raman lidar systems仿真过程中使用的系统常数见表1,采用合适的干涉滤光片参数[4, 16]。532 nm和354.8 nm拉曼激光雷达的温度不确定度如图2(b)所示。工作在532 nm的拉曼测温激光雷达由于激光能量和光学效率更高,同时大气消光更少,所以在夜晚观测中探测范围更大;工作在354.8 nm的拉曼激光雷达后向散射截面更大、太阳背景更小,因此在白天探测中温度不确定性更小。文中系统更关注白天温度探测,所以选用激光器的发射波长为354.8 nm。
表 1 拉曼激光雷达系统仿真参数
Table 1. Simulation parameters of Raman lidar system
Parameter Value Temporal resolution/s 1200 Spatial resolution/m 105 Emission optical efficiency 0.8 Quantum efficiency of PMT 0.25 Overlap function 1 -
文中设计的拉曼激光雷达系统采用收发合置的望远镜减小系统的接收视场角,以达到抑制背景光,提高白天探测性能的目的。系统的光路图如图3所示。激光光源是一台种子注入的三倍频Nd:YAG激光器。激光器产生的线偏振光经扩束器扩束后透射通过偏振分光棱镜,透射光经过1/4波片后变成圆偏振光,照射到收发合置的反射式望远镜的次镜上,然后被主镜反射到大气中。光子与大气粒子相互作用后产生后向散射回波信号,被望远镜接收后经1/4波片后又变成线偏振光,由于偏振方向发生了改变,回波信号被偏振分光棱镜反射后入射到以一定角度倾斜放置的分色分束器BS1上,波长大于395 nm的水汽振动拉曼散射信号被反射,经干涉滤光片IF3后由透镜汇聚,被光电探测器件接收。透射光中波长大于370 nm的
${\rm N_2}$ 振动拉曼散射信号被BS2反射后由透镜汇聚,被光电探测器件接收。波长小于370 nm的光经干涉滤光片IF0滤除背景光后进入转动拉曼散射信号的接收模块。由于低转动量子数拉曼信号距离弹性信号较近,为了保证对弹性信号的充分抑制,需要经过两个完全相同的干涉滤光片IF1a和IF1b后由透镜汇聚,被光电探测器接收。高转动量子数的拉曼信号经过干涉滤光片IF2后由透镜汇聚,被光电探测器接收。拉曼激光雷达主要器件的参数见表2。
图 3 拉曼激光雷达系统光路图
Figure 3. Light path diagram of the Raman lidar system
表 2 拉曼激光雷达系统主要参数
Table 2. Key parameters of Raman lidar system
Device Parameter Value Laser Wavelength/nm 354.8 Repetition rate/Hz 50 Pulse energy/mJ 200 Divergence angle/mrad <0.5 Beam expander Beam-expansion factor 10 Telescope Diameter/mm 400 Field of view/mrad 0.05 -
干涉滤光片参数的选取对拉曼激光雷达系统的测温性能有着至关重要的影响[11]。在选取干涉滤光片参数的时候要权衡拉曼信号温度敏感性和拉曼信号强度。利用修正的高斯函数模拟干涉滤光片的透过率曲线[11]:
$$f\left( \lambda \right) = A\exp \left[ { - {{\left( {\frac{{2\left( {\lambda - {\lambda _{\rm CWL}}} \right)B}}{{\Delta {\lambda _{\rm FWHM}}}}} \right)}^4}} \right] + {10^{ - \rm OD}}$$ (9) 式中:A为峰值透过率;
${\lambda _{\rm CWL}}$ 为干涉滤光片的中心波长;$\Delta {\lambda _{\rm FWHM}}$ 为干涉滤光片的带宽;B决定了干涉滤光片透过率曲线的形状,这里$B = \sqrt {\ln 2} $ ;OD为干涉滤光片的截止深度。首先考虑拉曼信号的温度敏感性:
$$\frac{{\partial S}}{{\partial T}} \approx \frac{{{S_{RR}}\left( {{\textit{z}},{T_2}} \right) - {S_{RR}}\left( {{\textit{z}},{T_1}} \right)}}{{{T_2} - {T_1}}}$$ (10) 滤光片的中心波长和带宽取值范围分别是352.8~354.8 nm、0.05~1 nm,取值步长是0.01 nm。温度
${T_1}$ 和${T_2}$ 分别取285 K和280 K。高度z取3 km,将公式(9)代入公式(1)可得随温度变化的转动拉曼信号。然后通过公式(10)对公式(1)求导得到转动拉曼信号的温度敏感性如图4所示。可以看到正负相关性区域大概以353.95 nm为界,可作为低高转动量子数拉曼通道选择的依据。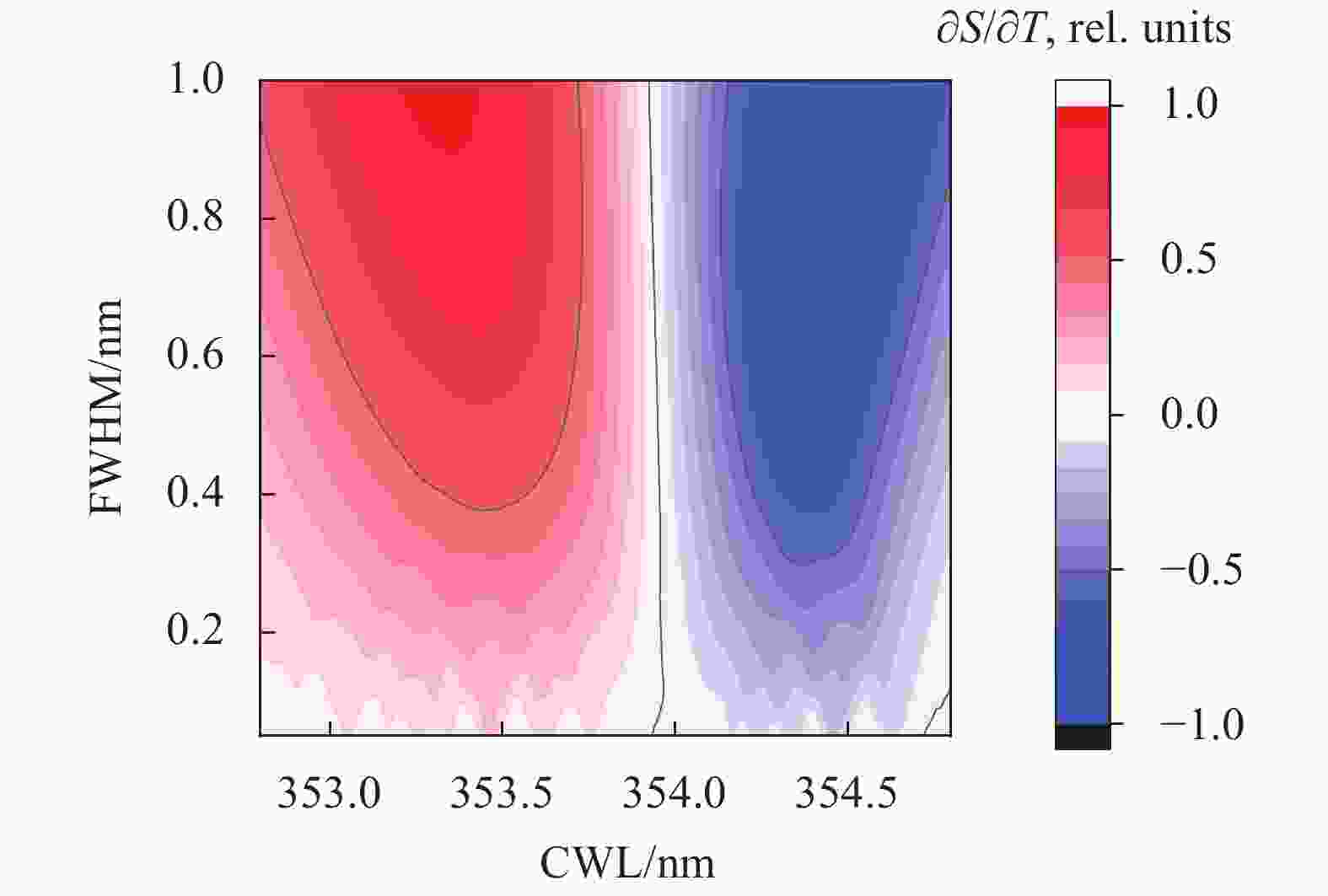
图 4 纯转动拉曼信号的温度敏感性
Figure 4. Temperature sensitivity of pure rotational Raman signals
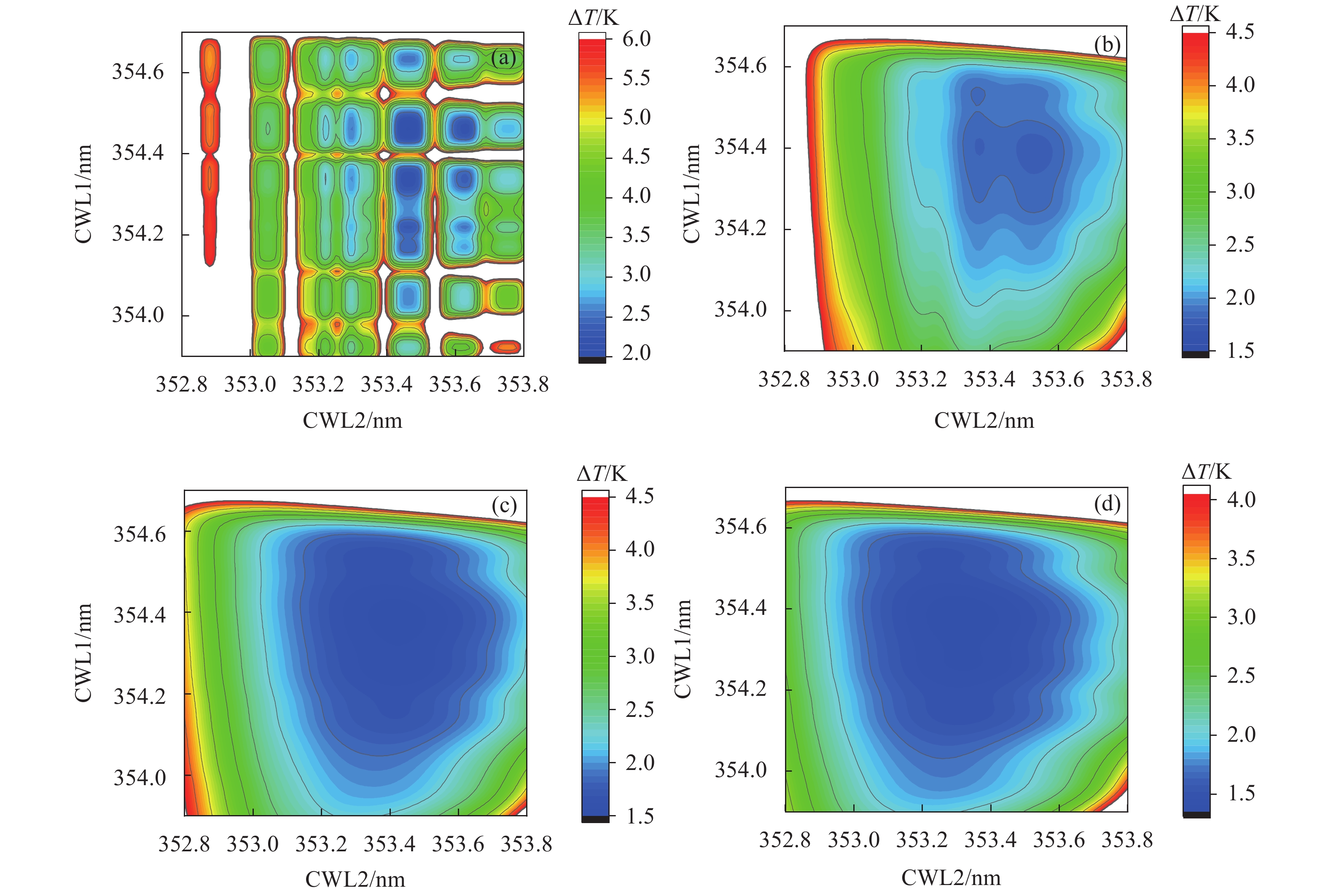
首先选取干涉滤光片的带宽。图5是带宽取不同值时温度不确定度随中心波长变化的等高线图。低、高转动量子数拉曼通道干涉滤光片的带宽分别用Δλ1和Δλ2表示,中心波长用CWL1和CWL2表示。干涉滤光片的带宽和中心波长的取值步长为0.01 nm。图5(a)中,Δλ1=Δλ2=0.1 nm;图5(b)中,Δλ1=Δλ2=0.3 nm;图5(c)中,Δλ1=0.3 nm,Δλ2=0.5 nm;图5(d)中,Δλ1=0.3 nm,Δλ2=0.8 nm。高度取5 km,温度取300 K。带宽取不同值时温度不确定度的平均值见表3。仿真表明,Δλ1=Δλ2=0.1 nm是最不合适的选择,因为当激光器的波长为354.8 nm时,N2纯转动拉曼谱线的间隔是大约是0.1 nm。Δλ1=0.3 nm,Δλ2=0.8 nm时,温度不确定度取值最小。但为保证白天探测的温度不确定度在后向散射系数≤50的云层中小于等于1 K,干涉滤光片IF2对弹性信号的抑制至少要达到6个数量级[11]。同时为了选取出具有高信号强度和高温度敏感性的转动拉曼信号,根据图1和图4,IF2的中心波长不应小于353 nm。结合工程实际,CWL2≥353 nm,Δλ2=0.8 nm不能保证充分抑制弹性信号,所以最终选择干涉滤光片的带宽为Δλ1=0.3 nm,Δλ2=0.5 nm。

图 5 白天探测滤光片带宽取不同值时,温度不确定度随中心波长的变化。(a) Δλ1=Δλ2=0.1 nm;(b) Δλ1=Δλ2=0.3 nm;(c) Δλ1=0.3 nm,Δλ2=0.5 nm;(d) Δλ1=0.3 nm,Δλ2=0.8 nm
Figure 5. Statistical temperature uncertainty versus filter center wavelength for different filter bandwidth in the daytime. (a) Δλ1=Δλ2=0.1 nm; (b) Δλ1=Δλ2=0.3 nm; (c) Δλ1=0.3 nm, Δλ2=0.5 nm; (d) Δλ1=0.3 nm, Δλ2=0.8 nm
表 3 温度不确定度的平均值
Table 3. Average value of statistical temperature uncertainty
Δλ1/nm Δλ2/nm ΔT/K 0.1 0.1 5.35 0.3 0.3 3.11 0.3 0.5 2.63 0.3 0.8 2.36 确定了干涉滤光片的带宽之后,需要确定干涉滤光片的中心波长。图6(a)和6(b)分别是白天和夜晚探测中,温度不确定度随CWL1和CWL2变化的等高线图。图6(c)和6(d)分别是白天和夜晚探测中CWL1取定值时,温度不确定度随CWL2变化的曲线;图6(e)和6(f)分别是白天和夜晚探测中CWL2取定值时,温度不确定度随CWL1变化的曲线。考虑到对弹性信号的充分抑制,低转动量子数拉曼通道的中心波长不应大于354.2 nm。由图6(c)和6(d)可以选定低转动量子数拉曼通道的的中心波长为354.15 nm。由图6(e)可得白天探测高转动量子数拉曼通道中心波长的最佳取值是353.4 nm,由图6(f)可得夜晚观测高转动量子数拉曼通道中心波长的最佳取值是353.2 nm。综合考虑白天和夜晚的观测性能,选定高转动量子数拉曼通道干涉滤光片的中心波长为353.3 nm。

图 6 温度不确定度随干涉滤光片中心波长的变化。(a)、(b) 白天、夜晚探测温度不确定度随中心波长CWL1和CWL2变化的等高线图;(c)、(d) 白天、夜晚探测CWL1取定值,温度不确定度随CWL2的变化;(e)、(f) 白天、夜晚探测CWL2取定值,温度不确定度随CWL1的变化
Figure 6. Statistical temperature uncertainty versus filter center wavelengths. (a), (b) Contour map of the variation of the statistical temperature uncertainty in daytime and nighttime detection with central wavelength CWL1 and CWL2; (c), (d) CWL1 takes a fixed value, the statistical temperature uncertainty changes with CWL2 in daytime and nighttime; (e), (f) CWL2 takes a fixed value, the statistical temperature uncertainty changes with CWL1 in daytime and nighttime
最后考虑干涉滤光片的截止深度对温度不确定度的影响。IF1a和IF1b在354.8 nm处的截止深度相同,记做OD1,IF2在354.8 nm处的截止深度记做OD2。OD1和OD2的取值范围是2~9。CWL1=354.15 nm,CWL2=353.3 nm,高度取5 km,温度300 K。图7是白天探测的温度不确定度随OD1和OD2变化的等高线图。综合考虑系统的性能和干涉滤光片的制作成本,最终选择OD1=3,OD2=6。
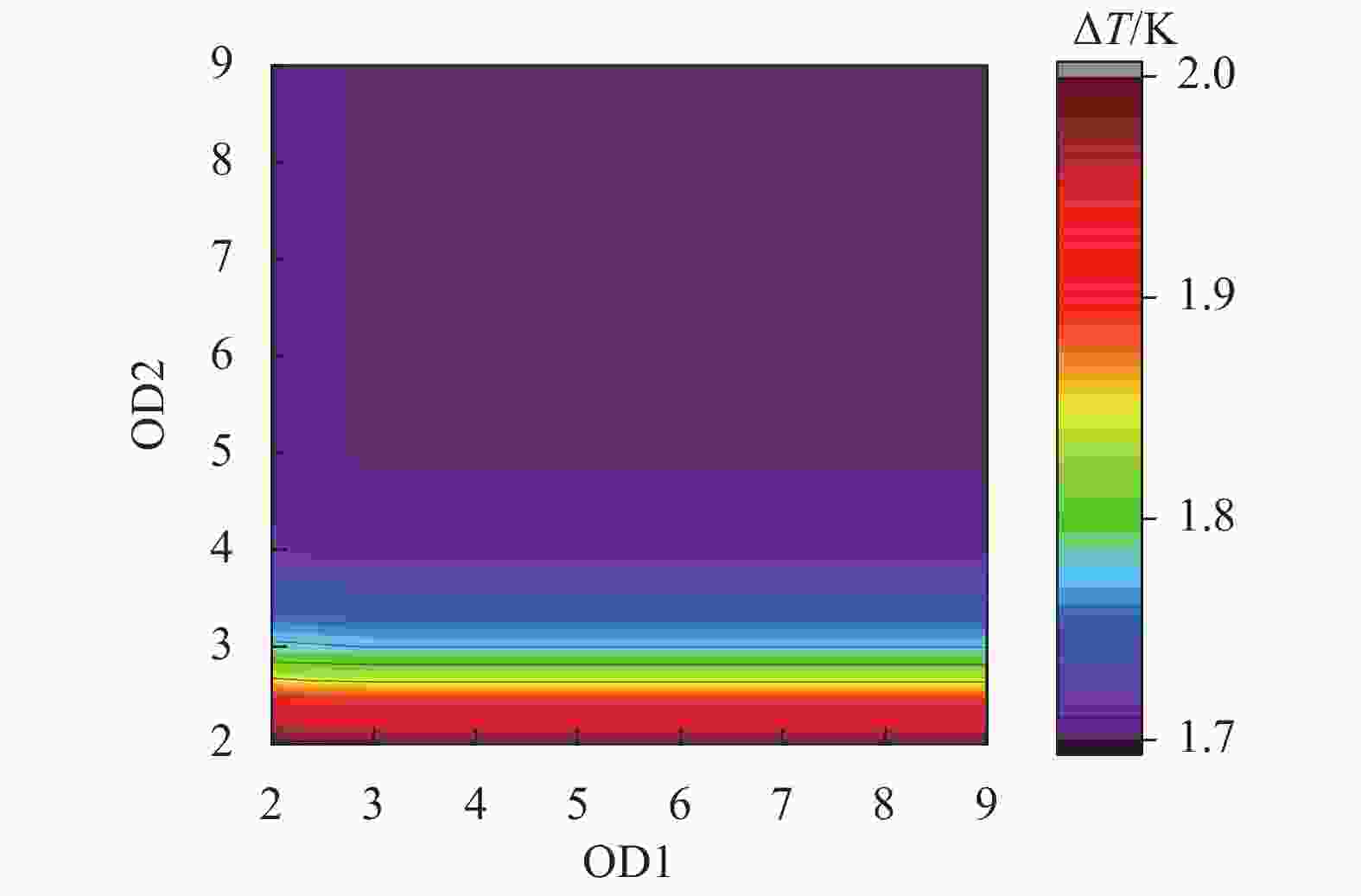
图 7 温度不确定度随截止深度变化的等高线图
Figure 7. Contour map of statistical temperature uncertainty varying with optical density
-
由于系统采用收发合置的望远镜,所以需要考虑退偏的问题。拉曼谱线退偏比的理论值是3/4[17],即当入射光是线偏振光时,后向散射信号中有4/7与入射光的偏振方向平行,3/7与入射光的振动面垂直[11]。在使用收发合置望远镜的拉曼激光雷达系统中,只有与入射光的振动面垂直的拉曼回波信号才能由偏振分光棱镜反射进入接收单元,拉曼回波信号的损失会导致系统的温度不确定度和水汽混合比统计误差增大。仿真过程中使用美国1976标准大气模型[15]模拟大气条件,系统常数见表1,干涉滤光片的参数见表4。将系统的仿真参数代入公式(4)计算得到白天和夜探测的温度不确定度如图8(a)所示。图8(a)中,红线、黑线分别表示使用收发合置的望远镜仿真得到的白天、夜晚探测的温度不确定度;蓝线表示收发分置拉曼激光雷达系统仿真得到的白天探测的温度不确定度,收发分置系统仿真计算时系统的视场角取0.75 mrad[4]。从图8(a)中可以看出使用收发合置的望远镜时,夜晚探测的温度不确定度在3730 m以下小于0.1 K,白天探测的温度不确定度在3180 m以下小于1 K;而使用收发分置的望远镜时,白天观测的温度不确定性在1 760 m以下小于1 K。白天温度探测的高度从1760 m提高到了3180 m,这是因为收发合置的望远镜减小了系统的接收视场角,并且减小后系统视场角仍然大于扩束后的激光发散角。假设水汽占大气总量的0.3%,将仿真参数代入公式(7)得到白天探测水汽混合比统计误差的仿真结果如图8(b)所示,白天探测水汽混合比的统计误差在2400 m以下小于0.001 g/kg。
表 4 干涉滤光片参数
Table 4. Parameters of interference filter
IF0 IF1a/IF1b IF2 IF3 IF4 Center wavelength/nm 355 354.15 353.3 407.7 386.8 Band width/nm 8.5 0.3 0.5 0.3 0.5 Peak transmission 0.56 0.59 0.52 0.75 0.7 Optical density 5 3 6 7 7 
图 8 (a)温度不确定度;(b)白天探测水汽混合比的统计误差
Figure 8. (a) Statistical temperature uncertainty; (b) Statistical error of water vapor mixing ratio in the daytime
-
文中介绍了温湿度廓线拉曼激光雷达系统的设计和仿真。比较了532 nm和354.8 nm作为拉曼激光雷达的激光光源时,白天和夜晚温度探测的性能。白天温度探测中,532 nm拉曼激光雷达的温度不确定度在2 000 m以下小于1 K,354.8 nm拉曼激光雷达的温度不确定度在4160 m以下小于1 K。354.8 nm的拉曼激光雷达白天温度探测性能明显优于532 nm,因此选择354.8 nm作为所设计系统的激光光源。为了抑制背景光,提高白天探测的性能,在光路设计中选择收发合置的望远镜以减小系统的接收视场角。采用级联的干涉滤光片进行分光。以最小的温度不确定度为依据,通过仿真分析确定了高低转动量子数拉曼通道干涉滤光片的带宽、中心波长以及截止深度。由于系统采用了收发合置的望远镜,所以需要考虑退偏的问题。在考虑退偏的情况下,白天探测的温度不确定度在3180 m以下小于1 K,白天探测水汽混合比的统计误差在2400 m以下小于0.001 g/kg。与收发分置系统相比,文中提出的收发合置拉曼激光雷达系统白天探测的性能得到了提升。
Design and simulation of Raman lidar with small field of view for atmospheric temperature and humidity detection
-
摘要: 太阳光背景辐射严重影响拉曼激光雷达白天探测的性能。为提高拉曼激光雷达白天探测的高度和精度,设计了激光波长为354.8 nm的拉曼激光雷达系统,讨论了354.8 nm和532 nm激光光源对拉曼激光雷达探测性能的影响,完成了系统的光路设计。偏振分光棱镜和1/4波片组成的光开关与收发合置的望远镜相结合,减小了系统的接收视场角,优化了白天探测的性能。以最小的温度不确定度为标准,通过仿真分析选取了转动拉曼通道干涉滤光片的各项参数,并对系统的探测性能进行了仿真。仿真过程中激光能量取200 mJ,频率50 Hz,积分时间20 min,距离分辨率105 m。收发合置的拉曼激光雷达系统在考虑退偏的情况下,白天探测的温度不确定度在3180 m以下小于1 K。白天探测水汽混合比的统计误差在2400 m以下,小于0.001 g/kg。仿真结果表明,白天探测的性能得到了一定程度的提高。Abstract: The solar background radiation seriously affects the detection performance of Raman lidar during daytime. In order to improve the detection height and accuracy of Raman lidar during daytime, a Raman lidar system with laser wavelength of 354.8 nm was designed. The influence of 354.8 nm and 532 nm laser sources on the detection performance of Raman lidar was discussed. The optical path design of the system was completed. The combination of photoswitch and monostatic telescope reduced the receiving field of view angle and optimized daytime detection performance. The photoswitch was composed of polarization splitting prism and 1/4 wave plate. With the minimum statistical temperature uncertainty as the standard, the parameters of rotational Raman channel interference filter were selected through simulation analysis. And the detection performance of the system was simulated. During simulation, the laser energy was 200 mJ, the frequency was 50 Hz, the integration time was 20 min, and the range resolution was 105 m. Under the condition of depolarization, the statistical temperature uncertainty of the monostatic Raman lidar system less than 1 K was obtained up to 3180 m height in the daytime. The statistical error of water vapor mixing ratio was less than 0.001 g/kg up to 2400 m height during daytime. The simulation results show that the performance of daytime detection has been improved to some extent.
-
Key words:
- lidar /
- Raman scattering /
- monostatic /
- temperature and humidity detection
-
图 2 (a)转动拉曼回波信号强度之比
${{{S_{RR}}\left( {532,J} \right)} /{{S_{RR}}\left( {354.8,J} \right)}}$ ;(b) 532 nm和354.8 nm拉曼激光雷达系统温度不确定度的比较Figure 2. (a) Ratio of rotational Raman echo signal intensities
${{{S_{RR}}\left( {532,J} \right)}} / $ $ { {{S_{RR}}\left( {354.8,J} \right)}}$ ; (b) Comparison of statistical temperature uncertainty between 532 nm and 354.8 nm Raman lidar systems
图 5 白天探测滤光片带宽取不同值时,温度不确定度随中心波长的变化。(a) Δλ1=Δλ2=0.1 nm;(b) Δλ1=Δλ2=0.3 nm;(c) Δλ1=0.3 nm,Δλ2=0.5 nm;(d) Δλ1=0.3 nm,Δλ2=0.8 nm
Figure 5. Statistical temperature uncertainty versus filter center wavelength for different filter bandwidth in the daytime. (a) Δλ1=Δλ2=0.1 nm; (b) Δλ1=Δλ2=0.3 nm; (c) Δλ1=0.3 nm, Δλ2=0.5 nm; (d) Δλ1=0.3 nm, Δλ2=0.8 nm
图 6 温度不确定度随干涉滤光片中心波长的变化。(a)、(b) 白天、夜晚探测温度不确定度随中心波长CWL1和CWL2变化的等高线图;(c)、(d) 白天、夜晚探测CWL1取定值,温度不确定度随CWL2的变化;(e)、(f) 白天、夜晚探测CWL2取定值,温度不确定度随CWL1的变化
Figure 6. Statistical temperature uncertainty versus filter center wavelengths. (a), (b) Contour map of the variation of the statistical temperature uncertainty in daytime and nighttime detection with central wavelength CWL1 and CWL2; (c), (d) CWL1 takes a fixed value, the statistical temperature uncertainty changes with CWL2 in daytime and nighttime; (e), (f) CWL2 takes a fixed value, the statistical temperature uncertainty changes with CWL1 in daytime and nighttime
图 7 温度不确定度随截止深度变化的等高线图
Figure 7. Contour map of statistical temperature uncertainty varying with optical density
图 8 (a)温度不确定度;(b)白天探测水汽混合比的统计误差
Figure 8. (a) Statistical temperature uncertainty; (b) Statistical error of water vapor mixing ratio in the daytime
表 1 拉曼激光雷达系统仿真参数
Table 1. Simulation parameters of Raman lidar system
Parameter Value Temporal resolution/s 1200 Spatial resolution/m 105 Emission optical efficiency 0.8 Quantum efficiency of PMT 0.25 Overlap function 1  下载: 导出CSV
下载: 导出CSV
表 2 拉曼激光雷达系统主要参数
Table 2. Key parameters of Raman lidar system
Device Parameter Value Laser Wavelength/nm 354.8 Repetition rate/Hz 50 Pulse energy/mJ 200 Divergence angle/mrad <0.5 Beam expander Beam-expansion factor 10 Telescope Diameter/mm 400 Field of view/mrad 0.05
下载: 导出CSV
表 3 温度不确定度的平均值
Table 3. Average value of statistical temperature uncertainty
Δλ1/nm Δλ2/nm ΔT/K 0.1 0.1 5.35 0.3 0.3 3.11 0.3 0.5 2.63 0.3 0.8 2.36
下载: 导出CSV
表 4 干涉滤光片参数
Table 4. Parameters of interference filter
IF0 IF1a/IF1b IF2 IF3 IF4 Center wavelength/nm 355 354.15 353.3 407.7 386.8 Band width/nm 8.5 0.3 0.5 0.3 0.5 Peak transmission 0.56 0.59 0.52 0.75 0.7 Optical density 5 3 6 7 7
下载: 导出CSV
-
[1] Shang Zhen, Xie Chenbo, Wang Bangxin, et al. Pure rotational Raman lidar measurements of atmospheric temperature near ground in Beijing [J]. Infrared and Laser Engineering, 2017, 46(10): 1030001. (in Chinese) doi: 1030001 [2] Liu Yang, Zhang Tianshu, Zhao Xuesong, et al. Optical design and analysis of laser Radar spectrometer with high accuracy [J]. Optics and Precision Engineering, 2018, 26(8): 74-79. (in Chinese) [3] Radlach M, Behrendt A, Wulfmeyer V. Scanning rotational Raman lidar at 355 nm for the measurement of tropospheric temperature fields [J]. Atmospheric Chemistry & Physics, 2008, 8(2): 7569-7602. [4] Hammann E, Behrendt A, Le Mounier F, et al. Temperature profiling of the atmospheric boundary layer with rotational Raman lidar during the HD(CP)2 Observational Prototype Experiment [J]. Atmospheric Chemistry and Physics, 2015, 15(5): 2867-2881. doi: 10.5194/acp-15-2867-2015 [5] Behrendt A, Nakamura T, Onishi M, et al. Combined Raman lidar for the measurement of atmospheric temperature, water vapor, particle extinction coefficient, and particle backscatter coefficient [J]. Applied Optics, 2002, 41(36): 7657-7666. doi: 10.1364/AO.41.007657 [6] Balin I, Serikov I, Bobrovnikov S, et al. Simultaneous measurement of atmospheric temperature, humidity, and aerosol extinction and backscatter coefficients by a combined vibrational-pure-rotational Raman lidar [J]. Applied Physics B: Lasers and Optics, 2004, 79(6): 775-782. doi: 10.1007/s00340-004-1631-2 [7] Behrendt A, Wulfmeyer V, Hammann E, et al. Profiles of second- to fourth-order moments of turbulent temperature fluctuations in the convective boundary layer: first measurements with rotational Raman lidar [J]. Atmospheric Chemistry and Physics, 2015, 15(10): 5485-5500. doi: 10.5194/acp-15-5485-2015 [8] Wang Yufeng, Gao Fei, Zhu Chengxuan, et al. Raman lidar for atmospheric temperature, humidity and aerosols up to troposphere height [J]. Acta Optica Sinica, 2015, 35(3): 0328004. (in Chinese) doi: 0328004 [9] Tan Min, Wang Bangxin, Zhuang Peng, et al. Study on atmospheric temperature and water-vapor mixing ratio based on Raman lidar [J]. Spectroscopy and Spectral Analysis, 2020, 40(5): 1397-1401. (in Chinese) [10] Cooney J. Measurement of Atmospheric Temperature Profiles by Raman Backscatter [J]. Journal of Applied Meteorology, 1972, 11(1): 108-112. doi: 10.1175/1520-0450(1972)011<0108:MOATPB>2.0.CO;2 [11] Weitkamp C. Lidar: Range-Resolved Optical Remote Sensing of the Atmosphere[M]. Berlin: Springer, 2015. [12] Weng M, Yi F, Liu F, et al. Single-line-extracted pure rotational Raman lidar to measure atmospheric temperature and aerosol profiles [J]. Optics Express, 2018, 26(21): 27555-27571. doi: 10.1364/OE.26.027555 [13] Shang Zhen, Xie Chenbo, Zhong Zhiqing, et al. Raman lidar for measurement of tropospheric water vapor [J]. Infrared and Laser Engineering, 2016, 45(12): 1211003. (in Chinese) doi: 1211003 [14] Whiteman D N, Melfi S H, Ferrare R A. Raman lidar system for the measurement of water vapor and aerosols in the Earth's atmosphere [J]. Applied Optics, 1992, 31(16): 3068-3082. doi: 10.1364/AO.31.003068 [15] National Aeronautics and Space Administration. U. S. Standard Atmosphere, NASA-TM-X-74335[R]. Washington, D. C., US: Government Printing Office, 1976. [16] Li Yajuan, Song Shalei, Li Faquan, et al. High-precision measurements of lower atmospheric temperature based on pure rotational Raman lidar [J]. Chinese Journal of Geophysics, 2015, 58(7): 2294-2305. (in Chinese) [17] Penney C M, Lapp M. Raman-scattering cross sections for water vapor [J]. Journal of the Optical Society of America, 1976, 66(5): 422-425. doi: 10.1364/JOSA.66.000422 -

 点击查看大图
点击查看大图

计量
- 文章访问数: 329
- HTML全文浏览量: 130
- PDF下载量: 53
- 被引次数: 0

























































