



 下载:
下载:














-
激光雷达的基本原理是:出射激光脉冲与大气相互作用,采用光学天线收集大气后向散射信号后输入光学接收机,经光电转换、模数转换和数据处理后,得出一系列关键大气参数。诸如气溶胶浓度、PM2.5值、云高、温度、湿度、能见度、大气成分(如水汽、各种污染气体成分)等[1-10]。
1.5 μm波段在大气参数探测上有许多优势。激光雷达大气探测应用的首要前提是人眼安全。由于人眼在1.5 μm可耐受的曝光功率最高,该波长的激光雷达具有最佳安全性能[11]。另外,由于1.5 μm为光通信波段,可以使用成熟的光通信器件,形成模块化的全光纤系统,有适合大温差、强震动、高盐雾工况的特点[12]。相比于激光雷达常用的可见光波段,1.5 μm波段水汽吸收截面小,并拥有穿透云雾的能力,在恶劣天气下探测能力强。其次,影响激光雷达信噪比的太阳背景辐射在红外波段强度小,因此1.5 μm可以实现昼夜连续的低噪声探测。
从探测方式上,1.5 μm激光雷达分为直接探测激光雷达和相干探测激光雷达。直接探测测风激光雷达利用直接探测器如单光子探测器探测大气回波强度,获得大气参数信息。直接测风激光雷达会在探测器前加鉴频器,将激光频率的变化转化成能量的相对变化,从而提取风速信息[13]。相干探测激光雷达通过大气回波信号与本振信号进行拍频,通过对拍频信号后的射频信号进行傅里叶变换后提取大气的多普勒功率谱信息。功率谱的中心频移可以反映风速信息,谱面积即大气回波信号强度。两者相比,直接探测雷达拥有高灵敏度、高距离分辨率的优势,而相干探测测风激光雷达除了风场探测能力,还可以探测得到其它回波信号信息,从而探测雨、降雪、云和风切变等大气参数。
在1.5 μm直接探测激光雷达方向,中国科学技术大学激光雷达团队研发了单光子探测激光雷达。该雷达不再依赖高功率激光器、大面积望远镜,提出高量子效率、全光纤集成的方案。目前,单光子探测激光雷达可以实现气象参数(风、温、湿、密度)探测,也可以实现环保参数(PM2.5\PM10、能见度、大气污染成分、染颗粒物偏振态)探测。在1.5 μm相干探测方向,中国科学技术大学发展了高时空分辨率、长探测距离的高性能大气探测相干激光雷达。通过对传统相干系统的升级和数据处理算法的改进,开发了偏振态、云、降水、风切变、湍流探测的能力,并实现了单台相干激光雷达多大气参数探测。
文中介绍了近年来课题组发展的基于单光子探测和相干探测的1.5 μm大气探测激光雷达,并且介绍了这些系统的一些应用案例。
-
目前,1.5 μm最佳的单光子探测器当属超导纳米线单光子探测器,其造价昂贵,且核心部件工作温度低于−270 ℃,需要复杂庞大的制冷设备[14]。因而1.5 μm激光雷达通常采用成熟的铟镓砷探测器。由于该探测器量子效率低、噪声高,传统观点认为:只有提高激光雷达的出射功率和增大望远镜的面积,才能提高激光雷达探测信噪比。例如:2007年,美国国家大气研究中心1.5 μm系统的发射脉冲能量达125 mJ,望远镜直径0.4 m,其结构复杂、重达数吨、体积十余立方米,功耗几十千瓦。由于光学破坏阈值限制、大口径望远镜加工工艺限制,传统激光雷达的性能已经达到瓶颈。面对传统激光雷达的困境,2015年开始,中国科学技术大学激光雷达团队开始研制对流层单光子探测激光雷达。
-
2015年基于单光子频率上转换探测器的1.5 μm气溶胶激光雷达研发成功,其原理如图1所示[15]。其核心创新点为对1.5 μm的单光子信号进行了频率上转换,在1.95 μm连续光的泵浦下,使用周期极化铌酸锂波导转换为863 nm的和频光,之后使用Si-APD进行高量子效率,低噪声的单光子探测。

图 1 单光子频率上转换激光雷达系统光路图
Figure 1. System layout of the up-conversion single-photon lidar
周期极化铌酸锂波导可利用准相位匹配实现高效光学频率转换。美国斯坦福大学、日本NTT实验室和中国科学技术大学研制的周期极化铌酸锂波导,其频率转换效率可达99.9%。利用该器件,该探测器在1550 nm波段的系统单光子探测效率达15%,暗计数40 Hz。
利用单光子上转换技术,该激光雷达系统进行了连续24 h的大气气溶胶探测实验。如图2(a)所示。在试验中,该雷达成功探测到了工厂夜间排放现象,如图2(b)所示。

图 2 (a)连续气溶胶回波信号强度探测;(b)夜间工厂排放记录
Figure 2. (a) Continuous aerosol echo signal detection results; (b) record of factory emission during the night
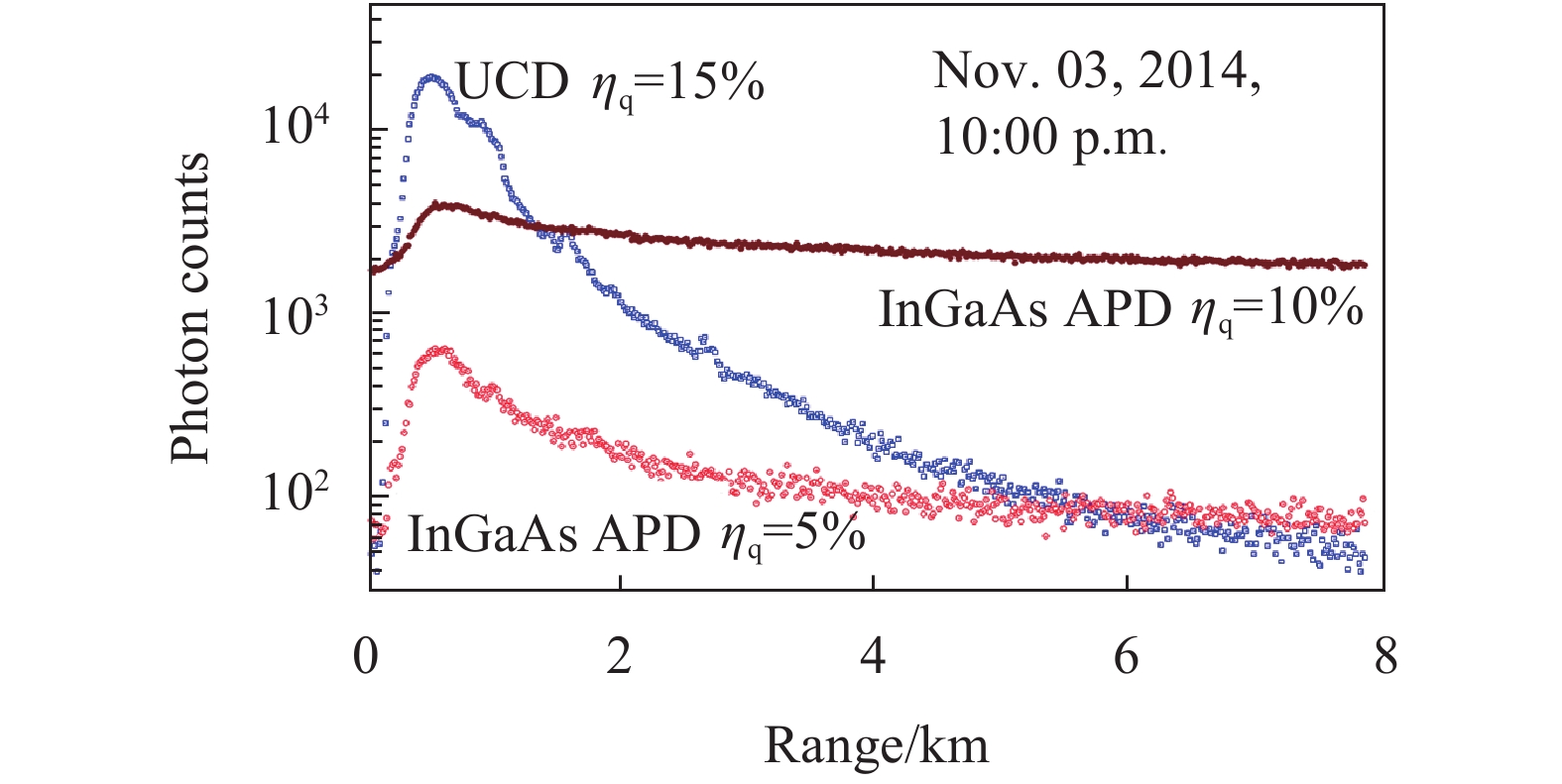
上转换单光子探测器和商业化的铟镓砷单光子探测器的性能对比如图3所示。在相同的激光器和接收望远镜条件下,单光子频率上转换探测器的探测信噪比明显比铟镓砷单光子探测器优越。

图 3 采用上转换单光子探测器(UCD)和InGaAs单光子探测器(APD)的性能比较
Figure 3. Comparison between the up-conversion single-photon detector(UCD) and the InGaAs APD
-
2016年,单光子频率上转换测风激光雷达面世[16]。该系统采用模块化设计,降低了激光雷达的复杂度,简化了激光雷达的设计、调试和维修。其光路图如图4所示。

图 4 频率上转换Doppler测风激光雷达系统光路图
Figure 4. Schematic of the frequency up-conversion Doppler wind lidar
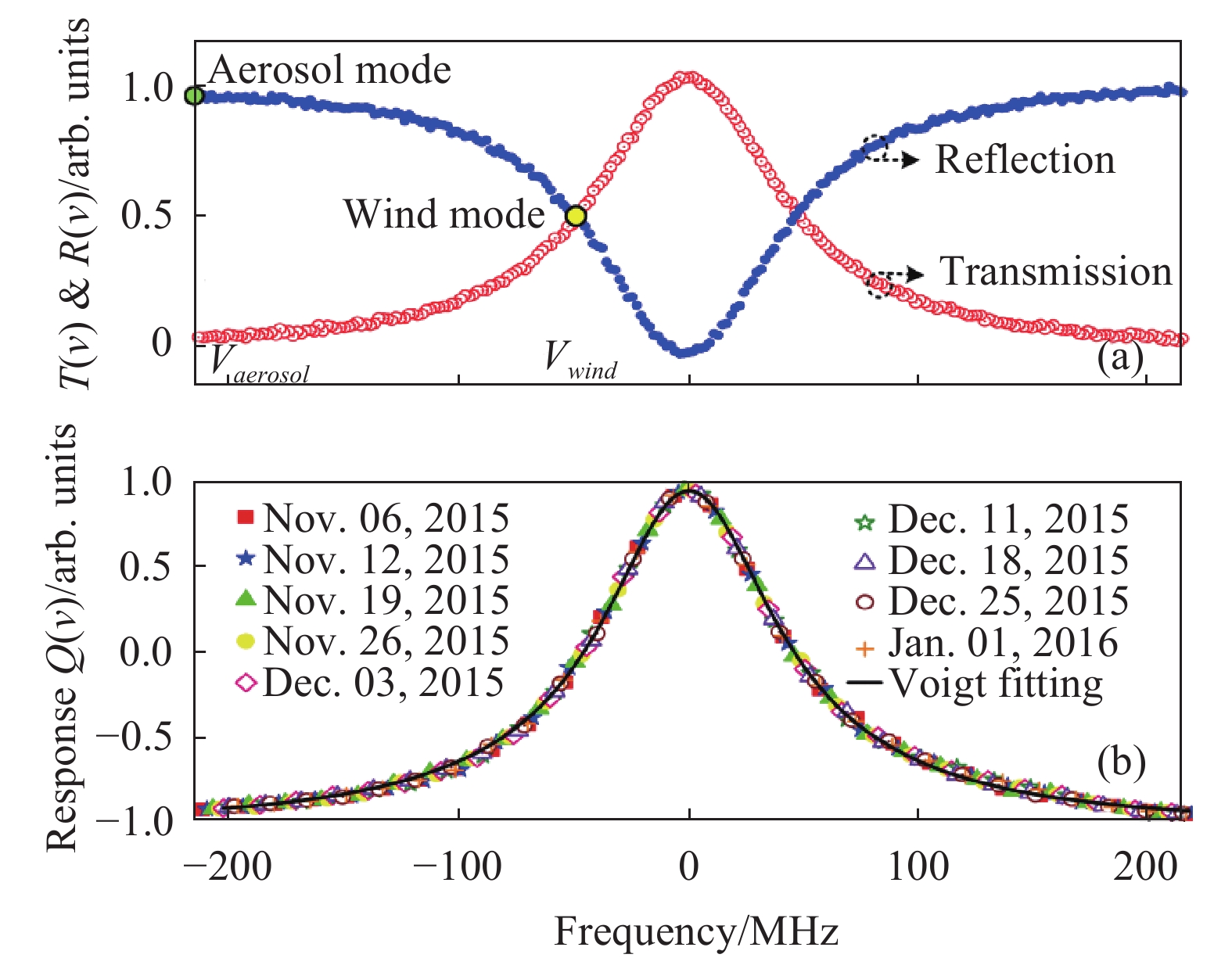
系统包括激光器模块、环形器模块、望远镜模块、光学扫描模块和接收模块。系统采用光纤布拉格光栅(FBG)滤除激光器模块产生的自发辐射噪声。为了提高系统稳定性,提出了采用时分复用技术,仅使用一个通道的FPI和单个探测器实现双边缘测风。反演大气风速的频率响应函数可由大气回波信号经FPI的透射信号和反射信号获得,透反信号的透过率曲线如图5(a)所示。其稳定性是测风激光雷达的关键,如图5(b)所示,该系统接收机的频率响应函数连续9周测量发现,其半宽的相对偏差小于0.1%。

图 5 (a)全光纤FPI的透射曲线和反射曲线;(b)连续9组测量的频率响应曲线和典型的Voigt拟合函数
Figure 5. (a) Transmission and reflection curves of FPI; (b) Frequency response functions measured over nine weeks and one typical Voigt fitting curve
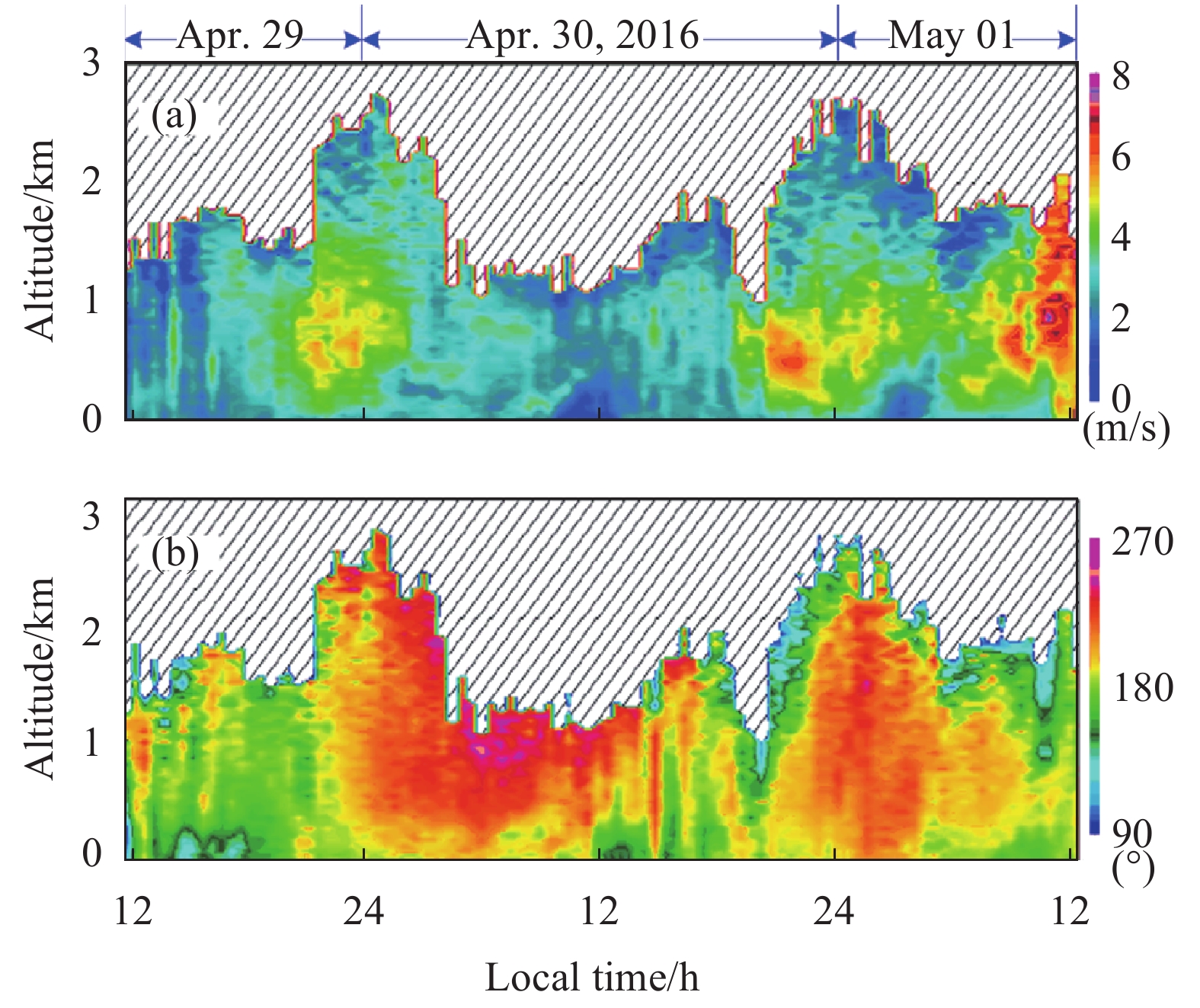
单光子测风激光雷达连续48 h的探测结果如图6所示。其时间分辨率为1 min,距离分辨率为30 m。为了进行对比,安装了一台超声波风速计同期进行探测。通过对两者的差值进行统计,可以得到风速差值的平均值为0.05 m/s,风向差值的平均值为−0.84°,风速差值的标准偏差为1.04 m/s,风向差值的标准偏差为12.3°。
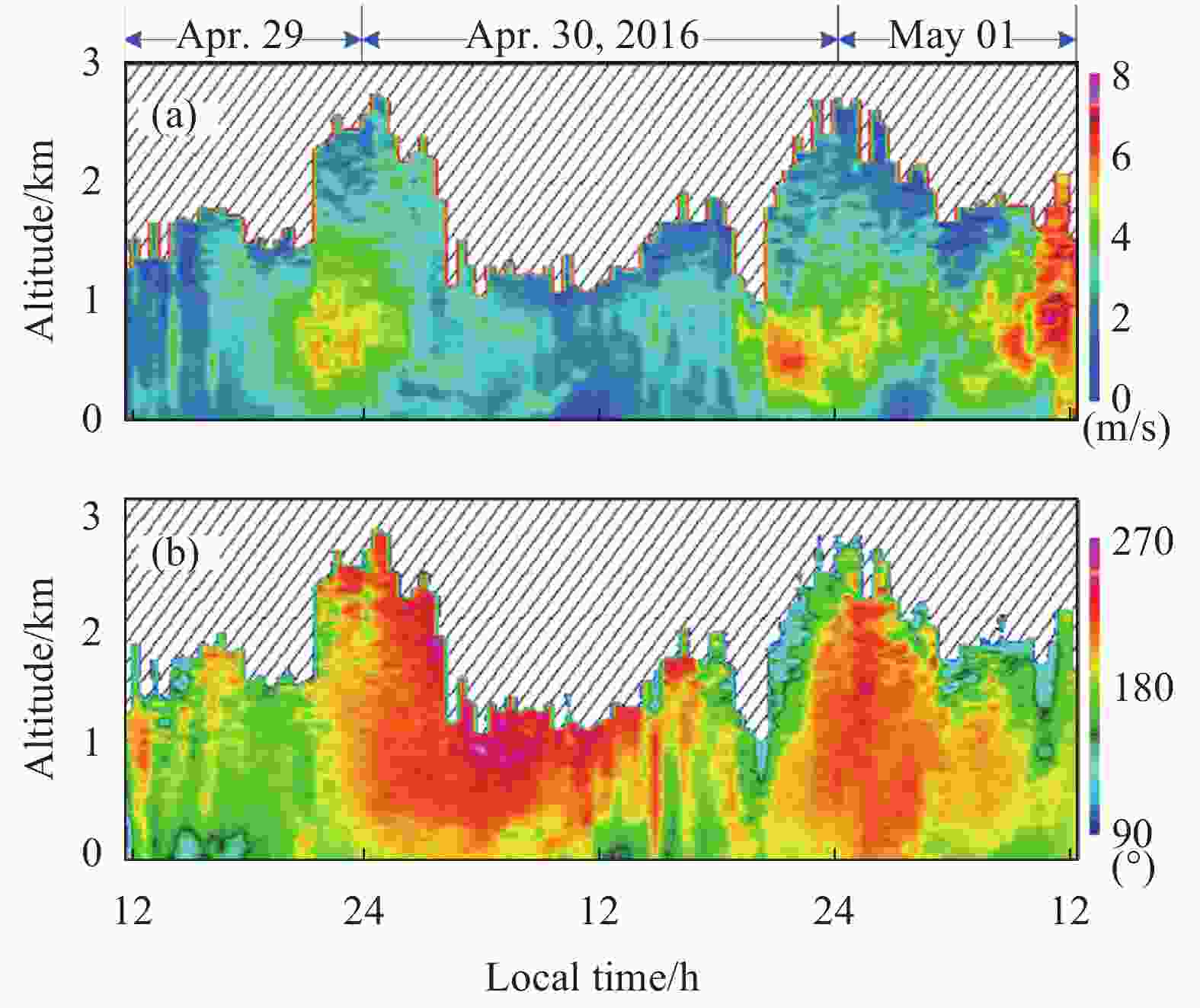
图 6 连续48 h观测的风场和能见度时空分布图(a)水平风速;(b)水平风向
Figure 6. Forty-eight-hour observation of atmospheric wind and visibility. (a) Horizontal wind speed; (b) Horizontal direction
-
传统的双边缘测风激光雷达采用双通道Fabry-Perot干涉仪,如图7(a)所示[17]。通过在两个通道引入固定的台阶,使两个通道的腔长存在固定的差异,从而实现频率间距固定的两个Fabry-Perot干涉仪透过曲线。但这种方法制作复杂,成本高,精确的光路对准、平行控制难度大,在复杂环境下稳定性差。

图 7 两种双边缘技术:(a)双通道FPI;(b)双频脉冲激光
Figure 7. Double-edge technique that adopts: (a) a double-channel FPI; (b) a dual-frequency laser pulse
为了解决这个问题,提出了基于双频激光脉冲的双边缘测风激光雷达方案[18]。如图7(b)所示,双频激光的其中一个频率(
${f_s}$ )位于Fabry-Perot干涉仪透过率曲线的上升沿,另外一个频率(${f_0}$ )位于透过率曲线的下降沿,当大气回波信号发生多普勒频移时,其导致双频信号的透过率差异,从而可以达到鉴频目的。在探测器端,该雷达使用1550 nm波段探测信噪比最高的超导纳米线单光子探测器。该探测器在1550 nm拥有超过60%的量子效率和低于300 Hz的暗计数,可为测风激光雷达提供高信噪比探测。
超导双频测风激光雷达进行了连续大气观测实验,并捕捉到了雷雨前大气边界层的风场演化过程,如图8所示。其中,水平风速和风向通过纬向风和经向风合成。从图8可以看出,2.6 km高度处雨云的风向朝北,可观测到雨云的分层的动态结构,且雨云处的风速略高于其底部的风速。

图 8 1 h观测的结果(a)纬向风、(b)经向风、(c)水平风速和(d)水平风向
Figure 8. One-hour observation results (a) zonal wind, (b) meridional wind, (c) horizontal wind speed, and (d) horizontal wind direction
-
偏振激光雷达可以利用大气气溶胶对激光的退偏振效应区分气溶胶的种类,是大气气溶胶探测的重要手段。世界首台超导偏振激光雷达在2017年诞生,其光路如图9(a)所示[19]。超导偏振激光雷达利用全光纤光路的优势,采用了时分复用技术,将信号较强的平行偏振通道信号使用保偏光纤进行延时,仅使用单探测器探测正交偏振态的两路回波信号。超导纳米线单光子探测器拥有目前世界最高的红外单光子探测效率,保障了探测信噪比。该结构解决了传统偏振激光雷达需要定期校准的问题。全光纤光路也简化了两路偏振探测通道的校准过程。如图9(b)所示,在时分复用模块前使用半波片和线偏振片调节入射光的偏振态,可以精确校准两路偏振通道的透过率。

图 9 (a)超导偏振激光雷达系统光路图;(b)雷达接收机校准光路
Figure 9. (a) Optical layout of the superconduction polarization lidar; (b) calibration layout of the lidar receiver
超导偏振激光雷达可同时探测大气气溶胶浓度和气溶胶退偏比,可以反演大气能见度并分辨气溶胶种类。如图10所示为超导偏振激光雷达探测得到的连续48 h气溶胶后向散射和其退偏比数据。该数据的时间分辨率为1 min,距离分辨率30 m。在合肥冬天雾霾天气下,大气气溶胶浓度探测距离超过6 km,气溶胶退偏比探测距离超过4 km。

图 10 连续48 h偏振雷达观测结果(a)回波信号强度分布;(b)退偏比分布
Figure 10. 48 h continuous polarization lidar measurement results of (a) backscattering intensity and (b) the LDR
在实验中,超导偏振激光雷达成功通过退偏比记录了特殊气溶胶排放。在距离雷达3.56 km处,气溶胶后向散射信号和气溶胶退偏比数据均出现了信号突增现象。根据该位置前后距离分辨率内的退偏比信号判断,可以发现强气溶胶后向散射信号伴随着退偏比的大幅度增加。这意味着该突增气溶胶种类与普通大气气溶胶有差异。经过实地考察发现,在气溶胶突增地点为在建高楼,可以判断该现象来源于建筑扬尘。
-
1.5 μm波段的单光子探测手段包括InGaAs单光子探测器、单光子频率上转换探测器、超导纳米线单光子探测器等。其中InGaAs单光子探测器虽然探测性能不如另外两类探测器,但它拥有体积小、重量轻、探测面元大、功耗小和成本低的优点,是1.5 μm激光雷达产品化的最佳方案[20]。
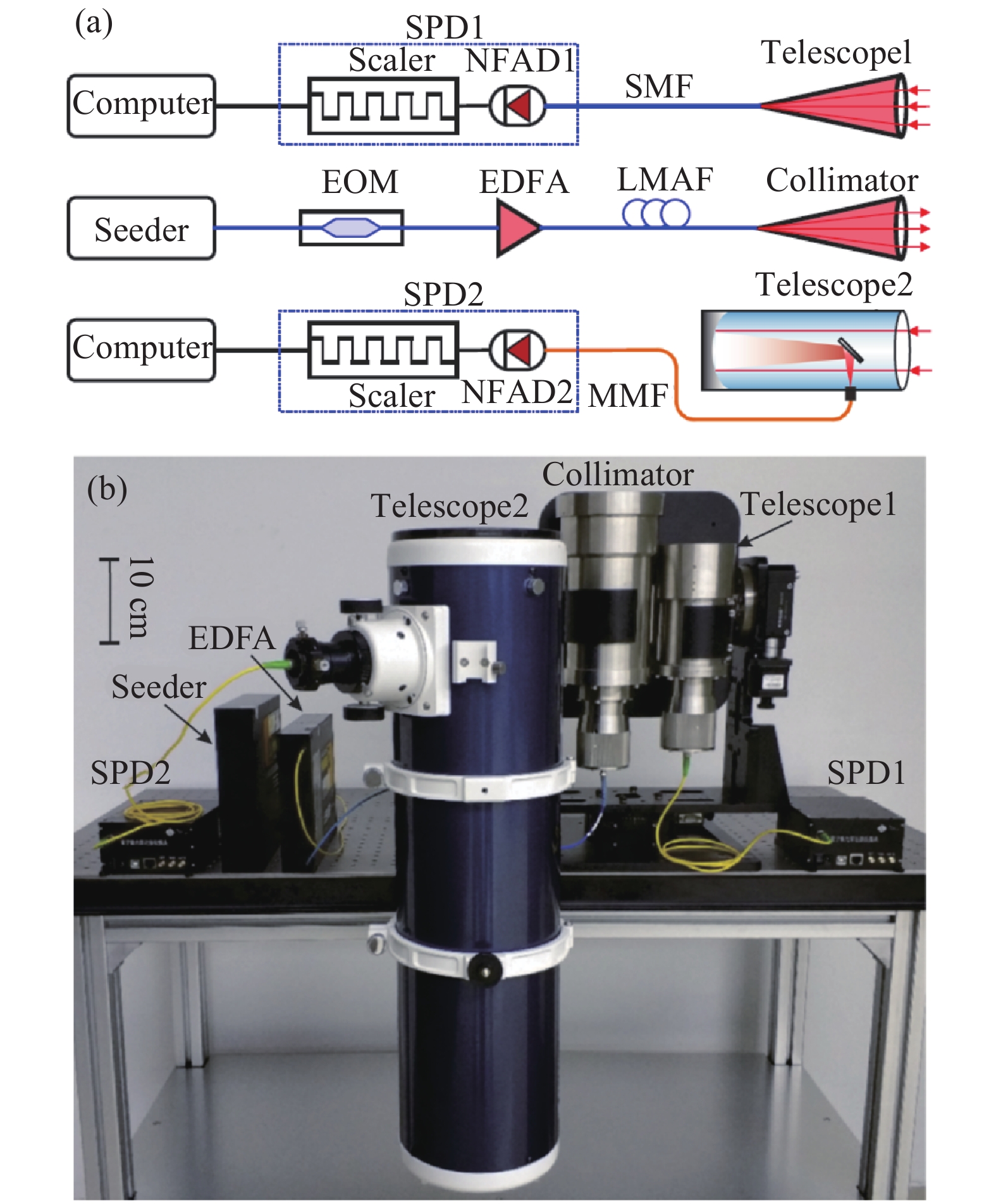
针对1.5 μm激光雷达探测,开发了一款自由运行的InGaAs/InP多模光纤耦合单光子探测器。该探测器的耦合光纤模场直径为62.5 μm,并且对入射光偏振态不敏感,可对大口径望远镜接收的大气回波信号进行探测。
利用研发的多模InGaAs/InP单光子探测器,搭建了一套单发双收云探测激光雷达样机。接收端分别为单模耦合望远镜和多模耦合反射式望远镜,旨在定量比较多模和单模接收机的性能。该套系统的光路图如图11(a)所示。其中单模耦合望远镜的口径为70 mm,视场角50 μrad,多模耦合望远镜的口径为150 mm,视场角为80 μrad。该系统的照片如图11(b)所示。

图 11 (a)实验光路;(b)1.5 μm InGaAs/InP单光子探测激光雷达照片
Figure 11. Experimental setup (a) and photo (b) of the 1.5 μm lidar using free running InGaAs/InP SPD
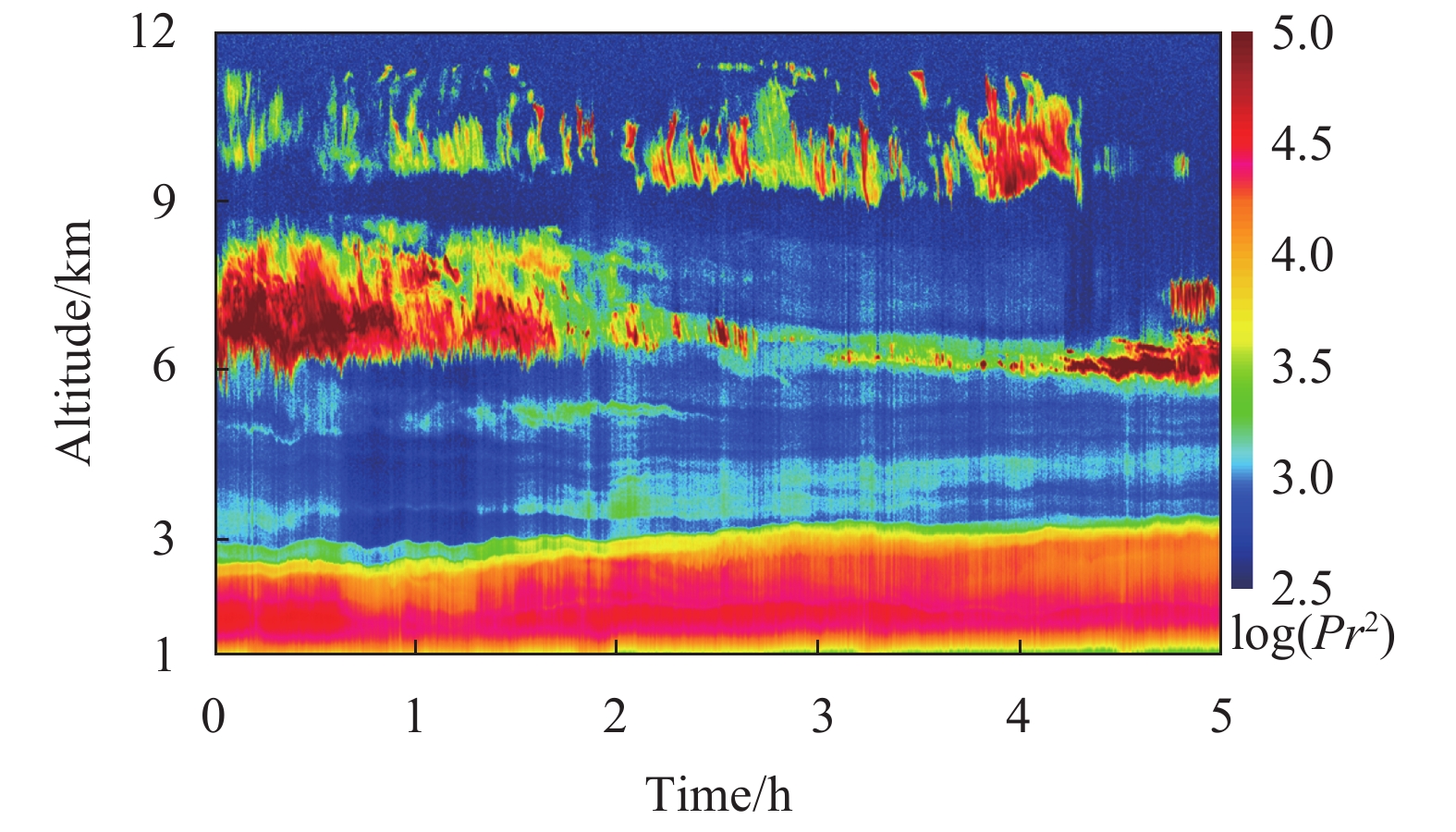
该云探测激光雷达系统进行了连续探测实验。图12为该雷达连续5 h大气垂直气溶胶和云探测的时间高度分布图。得益于1.5 μm波段的低水汽吸收和较强衍射能力,该雷达拥有卷云、积云和大气气溶胶的同时探测能力,得到云高云厚和气溶胶浓度参数。

图 12 多模接收的激光雷达的多层云距离修正回波信号
Figure 12. Range corrected signal of multi-layer clouds using the MMF receiver
-
利用超导单光子探测技术和飞秒频梳相干锁频技术,提出了自由空间、分布式的大气光谱遥感方案。该技术使用波长扫描光源作为种子光,与频率锁定的飞秒光频梳进行相干拍频,从而获得出射激光的精确绝对波长。在探测端,采用高量子探测效率的超导纳米线单光子探测器进行探测。若出射波长在大气中气体的吸收线上,该波长则随着气体吸收而快速衰减。该雷达可以获得大气中距离分辨的气体吸收谱。通过吸收谱线深度可以反演大气中痕量气体的浓度[21]。
该雷达的光路图如图13(a)所示。该雷达采用一台扫频激光器作为种子光,采用光纤放大器放大脉冲,大气回波信号采用62.5 μm多模耦合超导纳米线单光子探测器进行高信噪比探测。因为扫频激光器的波长精度不足以描绘气体吸收谱。为了对出射光的波长进行精确锁定,采用飞秒光频梳与种子光拍频的方式,使种子光出射绝对波长精度高于1 MHz。
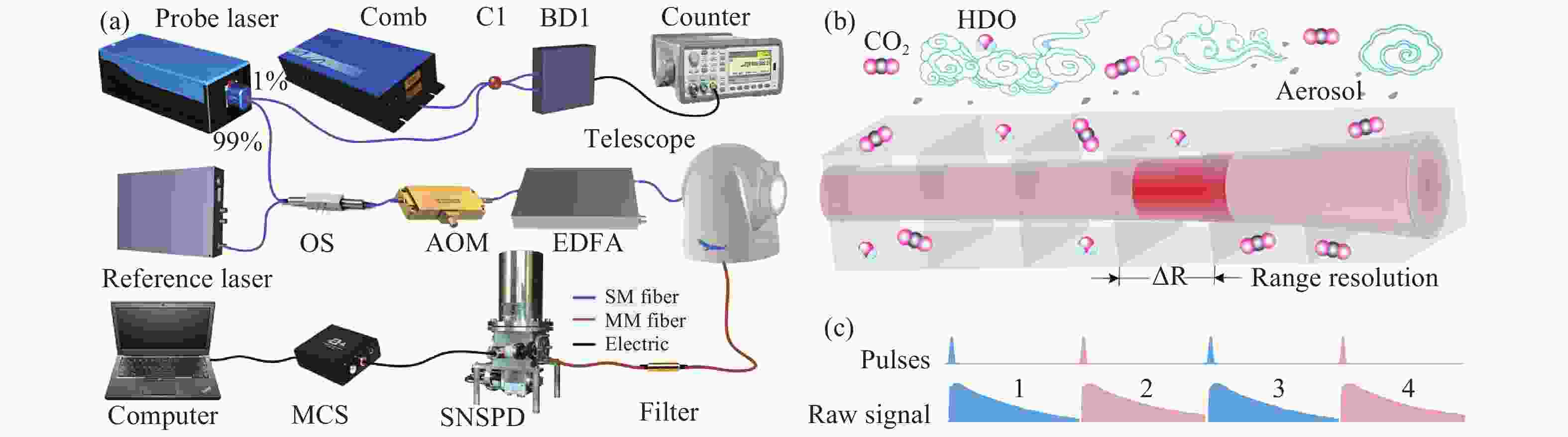
图 13 单光子分布式自由空间光谱激光雷达。(a)光路图;(b)光束与大气作用示意图;(c)时分复用时序图
Figure 13. Single-photon distributed free-space spectroscopy. (a) Optical layout; (b) Schematic of lights propagating in the atmosphere; (c) Time sequence of the time-division multiplexing technique
为了消除在波长扫描过程中大气气溶胶浓度变化、湍流引起望远镜耦合效率变化、激光器功率变化和探测器响应变化带来的影响,该系统加入了一台固定波长的1.5 μm种子激光源,通过高速光开关与扫描激光器快速时分复用交替出射,其回波信号作为大气气溶胶分布参考信号。该雷达的探测光频率为190.652 THz至190.682 THz,大气回波信号主要来自气溶胶,而主要吸收气体包括CO2和HDO,如图13(b)所示。系统的脉冲出射和大气回波时序图如图13(c)所示,其中蓝色为信号光,粉色为参考光。
该雷达的信号光通道大气回波信号强度如图14(a)所示,参考光通道回波信号强度如图14(b)所示,距离分辨率为60 m。对比可以发现信号光在吸收线中心波长吸收较强。不同距离处的光学深度与波长分布图如图14(c),可以看到在该扫描波段有三峰叠加结构。经过三峰拟合可以得到CO2和HDO的分别吸收占比,如图14(d)所示。


图 14 回波信号和光谱。(a)探测通道信号;(b)无气体吸收的参考通道信号;(c)不同距离处光学深度;(d) 4 km处吸收光谱的洛伦兹拟合结果
Figure 14. Backscattering signals and spectra. (a) The probe signal; (b) Reference signal without gas absorption; (c) Optical depth at different distance; (d) Lorentz fitting of the range-resolved spectrum at 4 km
单光子灵敏度自由空间分布式光谱探测激光雷达的连续观测结果如图15所示(1 ppm=10−6)。图15(a)为大气CO2浓度距离时间分布,图15(b)为HDO气体浓度距离时间分布。搭配大气风廓线相干探测激光雷达,可获得大气载噪比、风速和风向数据,从而计算大气的水平和垂直输送过程以及其对痕量气体浓度的影响。在实验中,可以看到在每天的早晨8:00至12:00,大气湍流强度迅速增长。同时,大气CO2浓度也随之下降。在傍晚和晚上,大气湍流运动减弱,大气中的CO2浓度也慢慢积聚增加。

图 15 连续观测结果(a)二氧化碳浓度分布;(b) HDO浓度;(c)载噪比;(d)水平风速;(e)水平风向;(f)与点式二氧化碳探测器浓度对比
Figure 15. Results of continuous observation. (a) CO2 concentration; (b) HDO concentration; (c) CNR; (d) Horizontal wind speed; (e) horizontal wind direction; (f) Point CO2 detector concentration comparison
为了验证该雷达气体浓度探测的准确性,实验在距离雷达2 km处的光路附近放置了点式CO2探测器。雷达与探测器的数据连续对比如图15(f)所示,两者结果吻合良好。
-
目前国际上相干探测雷达还未能实现大气退偏比和风场的同时观测。科罗拉多大学报道了一个同时测风和测大气退偏振比的相干多普勒测风激光雷达系统的仿真[22]。但是他们在仿真实验的光路中使用了4个平衡探测器,系统复杂,不便于使用和维护。且不同探测器的响应不可能完全相同,使用4个探测器就会由于响应不同而引入系统误差。
笔者所在课题组研发了一种使用单个平衡探测器的、可同时探测风场和大气退偏比的全光纤相干多普勒测风激光雷达[23]。其光路如图16(a)所示。相比于普通相干多普勒测风激光雷达,该雷达采用时分复用模块,实现偏振分束后的两路信号分时进入探测器进行探测。该方法只需一个探测器即可探测大气退偏比。该系统接收机的校准光路如图16(b)所示。该方案相比于多探测器偏振激光雷达系统,不需要周期性校准,提升了系统易用性和稳定度。

图 16 (a)偏振相干多普勒激光雷达光路图;(b)校准光路图
Figure 16. (a) Optical layout of the polarization coherent Doppler lidar; (b) Optical layout of calibration
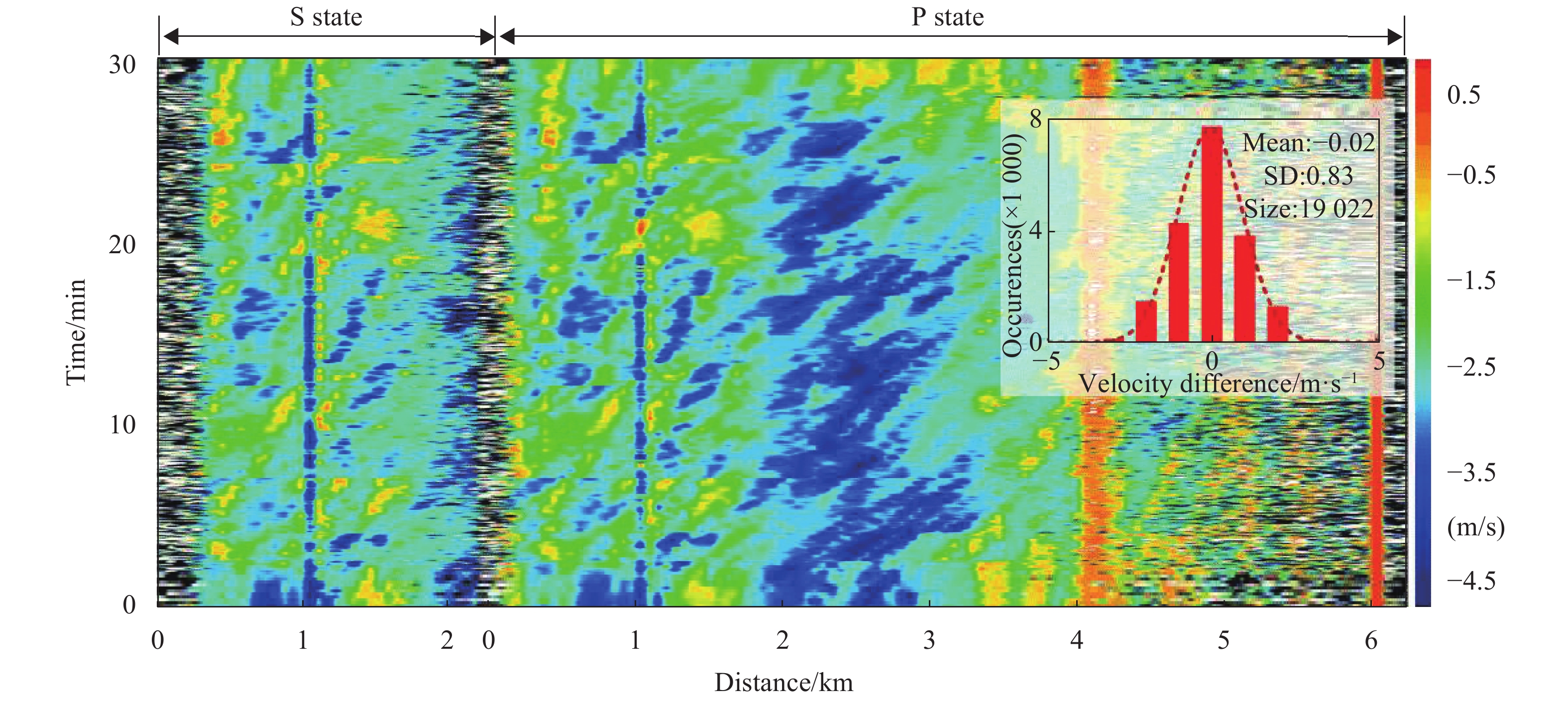
图17为该相干雷达系统探测得到的两偏振通道的风速时间距离分布。由于大气回波信号中的退偏振通道S通道的载噪比远小于平行偏振通道P通道,因此图中S偏振态的测风距离为2 km,而P偏振态的风速探测距离达6 km。

图 17 单个平衡探测器探测的S和P偏振态回波信号风速
Figure 17. Wind velocity retrieved from both S and P states backscattering by single balanced detector
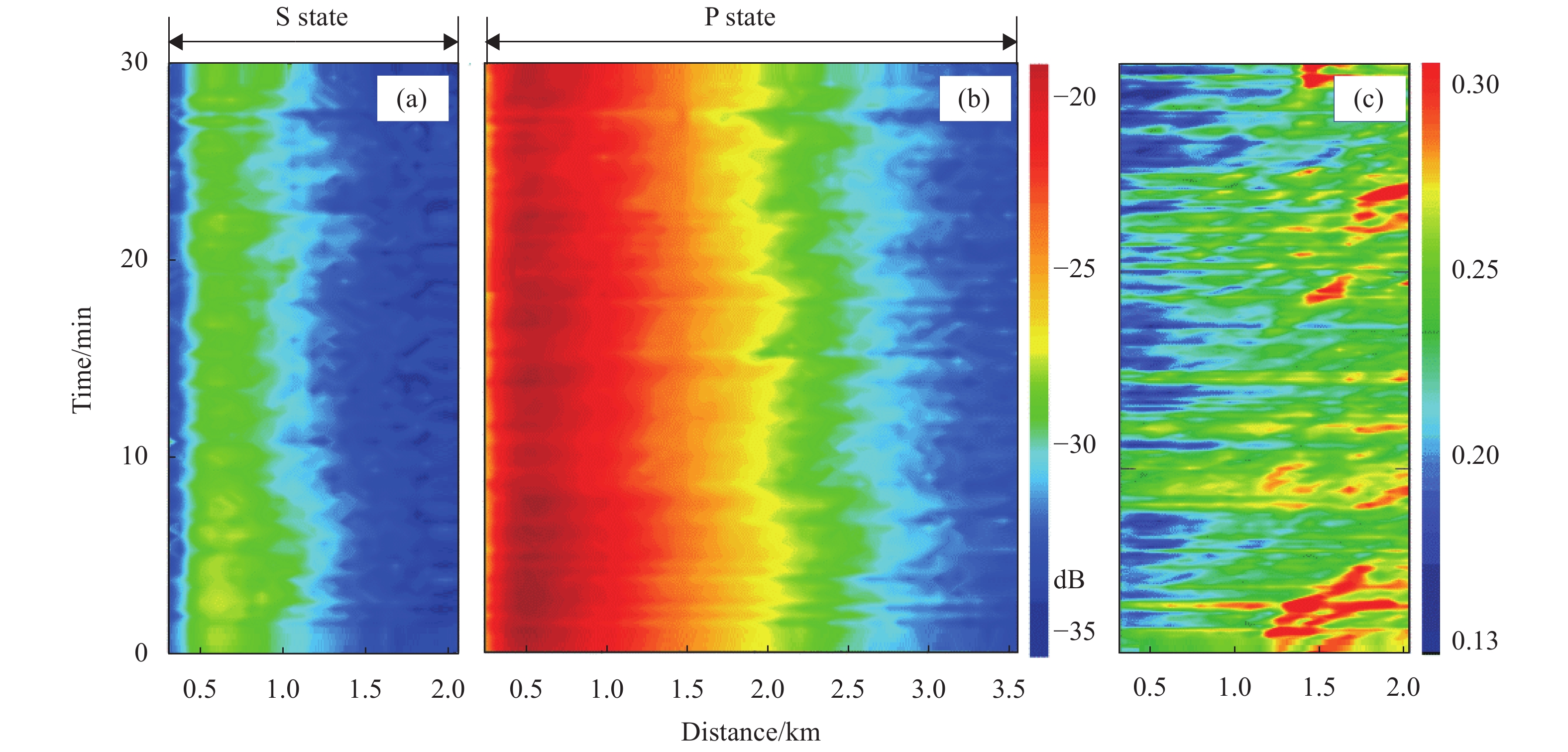
偏振相干测风激光雷达的大气退偏比由两个通道的载噪比之比计算得到。图18(a)和(b)分别为两通道的载噪比分布。图18(c)为计算得到的大气退偏比。

图 18 偏振相干多普勒激光雷达测得的(a) S偏振态的载噪比分布;(b) P偏振态的载噪比分布;(c)退偏比分布
Figure 18. (a) CNR distribution of S states, (b) CNR distribution of P states and (c) distribution of depolarization ratio measured by the polarization CDL
该偏振相干激光雷达采用了时分复用的接收方案,同时可以探测大气风场和退偏比。该雷达拥有小型化、免周期性校准的特点。其风场探测距离大于6 km,退偏比探测距离大于2 km。
-
高距离分辨率的风场探测是多普勒激光雷达发展的一个重要方向。提高距离分辨率可以将多普勒测风激光雷达应用于飞机尾流探测、风洞探测等特殊场合。基于飞行时间法的激光雷达可以缩小脉冲宽度来提高距离分辨率。但在脉冲激光器峰值功率受限情况下,缩小脉冲宽度将会降低脉冲能量,影响探测信噪比。
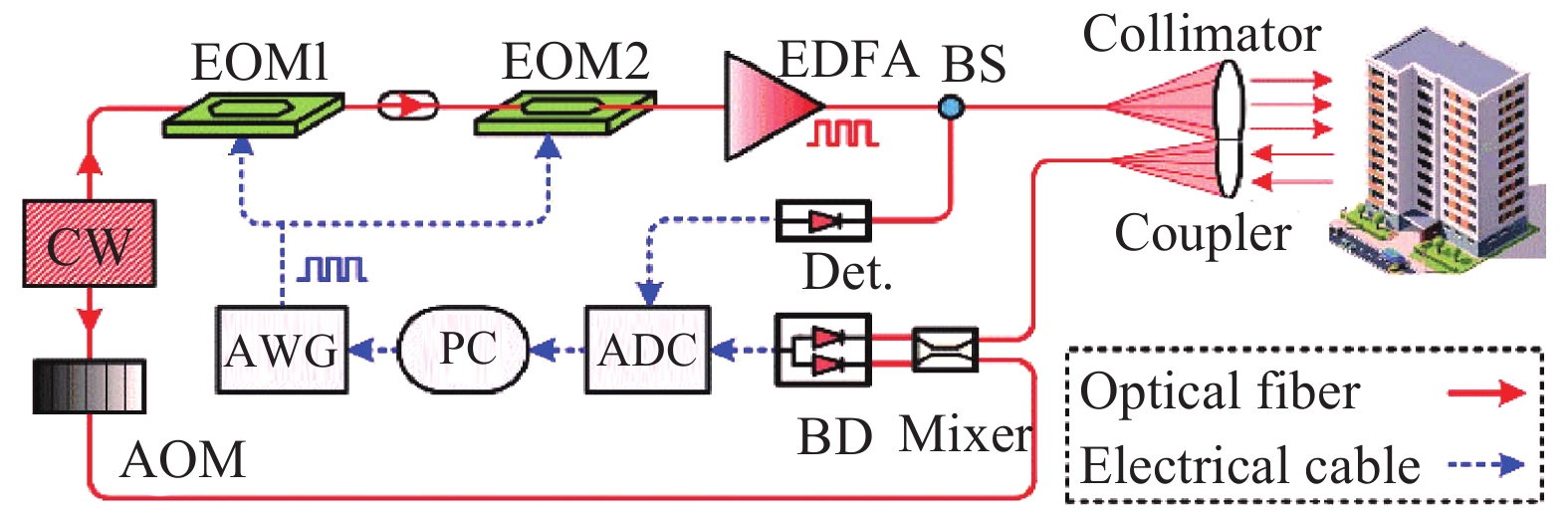
为了解决这个问题,将通信领域的脉冲编码技术应用于相干测风激光雷达,在不丢失距离分辨率信息的情况下提高脉冲的重复频率,从而提高脉冲发射的平均功率。编码相干测风激光雷达的光路图见图19。

图 19 编码相干测风激光雷达光路图。CW,连续波激光器;AOM,声光调制器;EOM,电光调制器;AWG,任意波形发生器;EDFA,掺铒光纤放大器;BS,分束器;BD,平衡探测器;ADC,模数转换器
Figure 19. Optical layout of the coding CDWL. CW, continuous-wave laser; AOM, acoustic–optic modulator; EOM, electro-optic modulator; AWG, arbitrary waveform generator; EDFA, erbium-doped fiber amplifier; BS, beam splitter; BD, balanced detector; ADC, analog-to-digital converter
种子激光器产生1550 nm的连续激光(CW),分为本振光和种子激光。双通道的任意波形发生器(AWG)产生Golay电脉冲编码序列,驱动电光调制器,将连续的种子激光调制成Golay光脉冲序列。为了保证光脉冲的消光比,此处采用两个EOM的级联方式,并调节AWG两个输出通道的延时,保证EOM1和EOM2的同步。脉冲种子光注入掺饵光纤放大器(EDFA),经1∶99的分束器(BS)之后。99%的激光经准直器(Collimator)出射,1%的激光被用于能量监测通道,监测出射激光功率。本振光经声光调制器(AOM)频移80 MHz后,输入混频器(Mixer)。回波信号由接收器(Coupler)接收,与本振光在混频器中混频,光信号在平衡探测器(BD)中被转换为模拟电信号,并由数模转换卡将模拟信号转换为数字信号,在计算机(PC)中进行数据解码和风速反演。
能量监测通道的信号如图20所示,图20(a)是经过两级EOM 之后产生的种子光序列波形。图20(b)是图20(a)经过EDFA 放大后的出射激光序列波形。平坦的种子光脉冲序列经EDFA 之后,由于放大器的瞬态效应和增益介质的耗尽,放大之后的激光序列波形不再平坦,仍然进行解码将产生严重的旁瓣干扰,甚至无法正确反演风速。
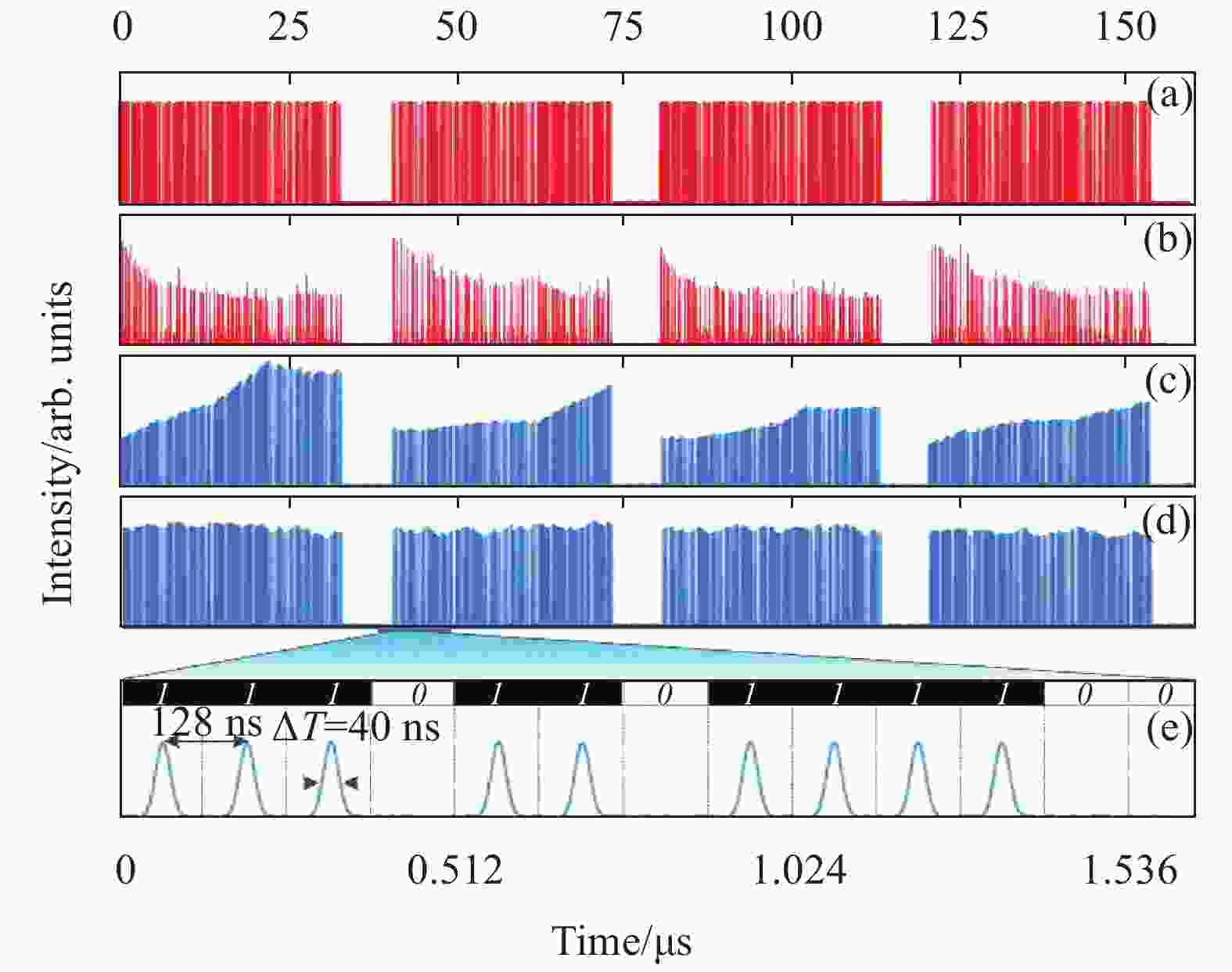
图 20 激光脉冲序列。(a)格雷编码种子光输出;(b)无反馈调制的激光脉冲放大输出;(c)反馈调制后的格雷编码种子光输出;(d)反馈调制后的激光脉冲放大输出;(e)脉冲时域(d)的放大示意图
Figure 20. Laser pulse sequence. (a) Golay coding seed laser output; (b) Amplified laser sequence without feedback control; (c) Modulated Golay coding seed laser output; (d) Amplified laser sequence output with feedback control; (e) Enlarged waveform of (d)
为了解决脉冲能量波动问题,,提出了一种自适应脉冲修正算法。使用1∶99 分束器中1%通道对出射脉冲能量进行监测,在放大器布居数较高的编码序列初始位置降低AWG电信号的幅值,降低种子光的能量。在放大器布居数较少的序列末端增加种子光的能量。并通过不断的闭环控制,减小出射激光脉冲能量抖动。图20(c)为自适应脉冲修正之后的种子激光脉冲序列,图20(d)为图20(c)经放大器之后的脉冲序列。相比图20(b),图20(d)的脉冲抖动控制在±5%以内。将图20(d)局部放大得到图20(e),此时脉冲间隔为128 ns,脉冲宽度为40 ns。
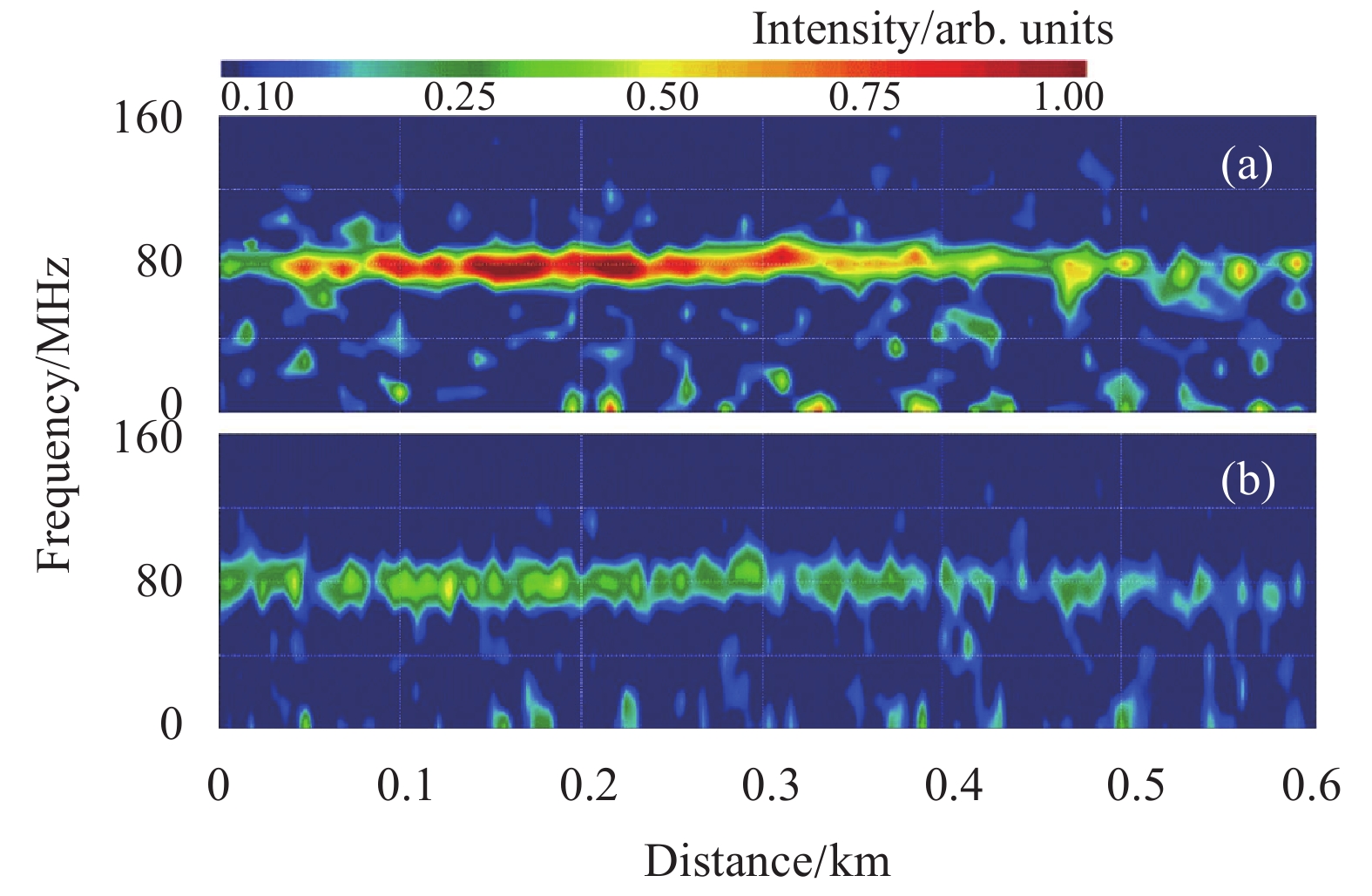
图21为非编码与编码相干多普勒测风激光雷达系统回波信号功率谱之间的比较。由图可见,由于非编码系统距离分辨率差,回波信号在距离轴上累积更多,因此其功率谱强度比编码系统大,且聚集性更好。而编码系统虽然功率谱强度低,但是拥有更高的距离分辨率。

图 21 (a)非编码和(b)格雷编码相干多普勒测风激光雷达回波信号功率谱分布
Figure 21. Power spectra distribution of (a) noncoding CDWL; (b) Golay coding CDWL
-
1.5 μm相干探测激光雷达是对流层内大气风场探测的重要手段,其具有高探测精度、高时间分辨率的特点[24-27]。传统相干探测激光雷达的输出参数只有径向风场,功能单一。通过对相干探测激光雷达回波信号的功率谱进行深度分析,可获得载噪比、谱宽、风速时间空间梯度、偏度数据,从而反演云高云厚、雨速、风切变、湍流耗散率等额外大气参数[28-29]。
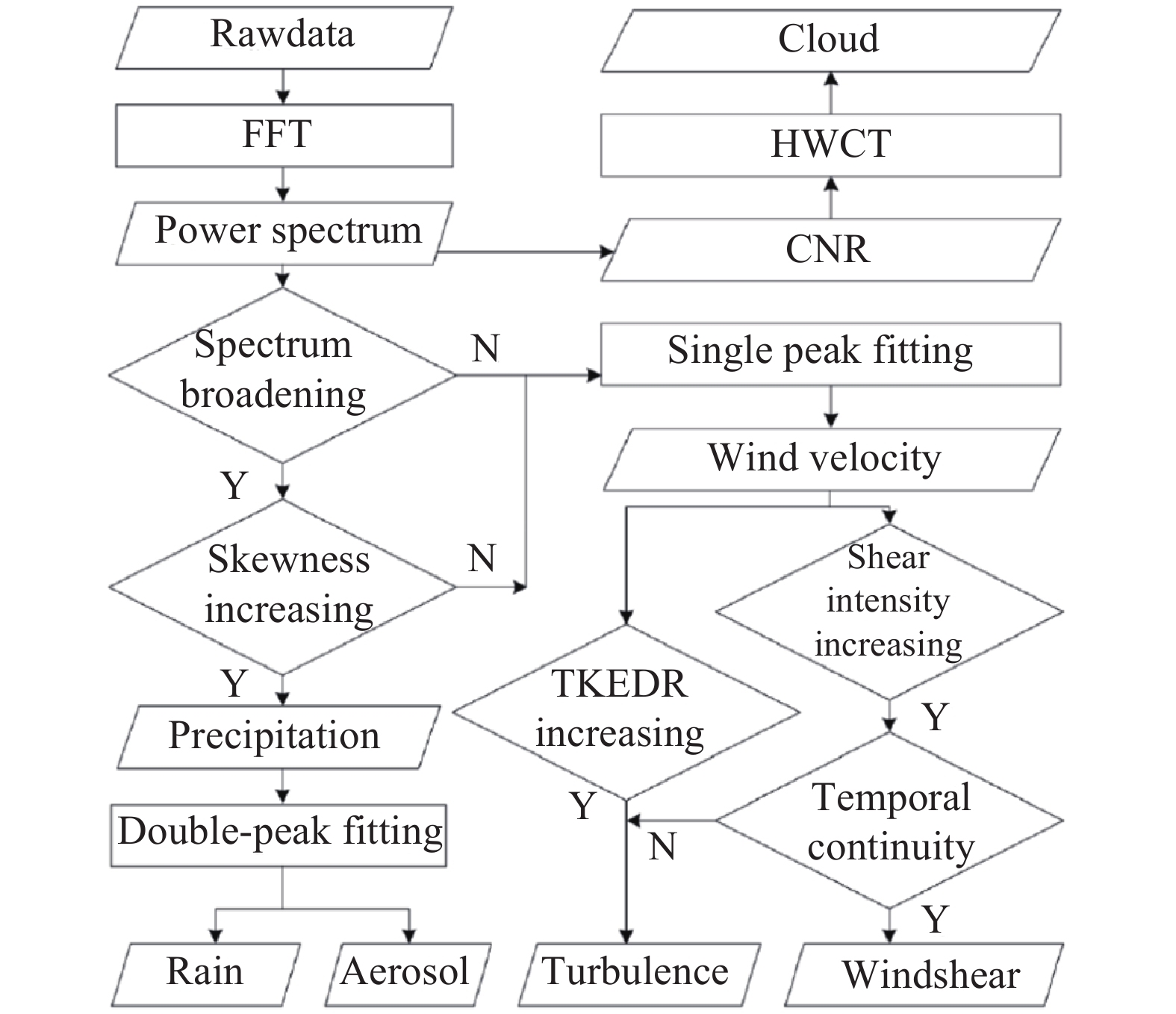
大气状况识别流程如图22所示。当雷达功率谱输入时,首先通过激光雷达载噪比可以判断云层信号。由于降水会引起回波信号功率谱增宽和产生偏度,通过谱宽和谱偏度的计算,可以识别是否有降水。通过对谱的双峰拟合,可以分离风速和雨速。对风速进行切变强度计算,可以识别风切变现象。最后流耗散率强度可以识别湍流和风切变。

图 22 云、降水、湍流和风切变的识别过程
Figure 22. Identification procedure of cloud, precipitation, turbulence, and wind shear
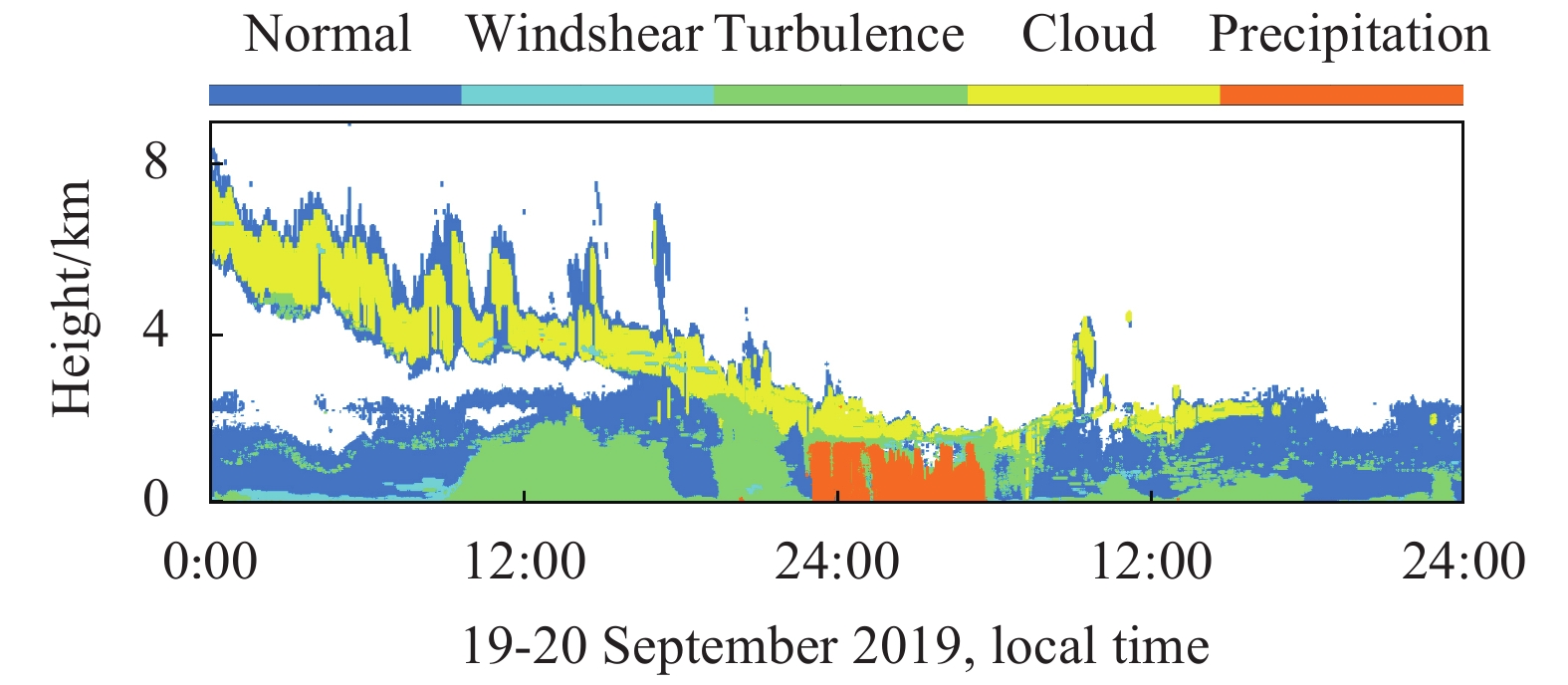
图23展示了2019年9月19至20日,大气多参数探测相干激光雷达于内蒙古记录的一次降水过程。该雷达输出的参数包括载噪比、谱宽、偏度、水平风速、水平风向、垂直风速、湍流耗散率、切变强度。根据这些参数,可以采用算法对大气状态进行识别。图24为该次探测数据的大气状况识别结果。图中可以发现切变发生在无降水夜晚的低空和边界层顶。日出时分切变被打破,湍流开始发展。当云层高度低至3 km时,开始了降水。降水后大气温度较低,第二天的湍流效应明显减弱。

图 23 2019年9月19至20日间一次降雨过程中的连续观测结果。(a)载噪比;(b)谱宽;(c)偏度;(d)水平风速;(e)水平风向;(f)垂直风速;(g)对数湍流耗散率;(h)切变强度
Figure 23. A precipitation process observed by the CDWL during 19-20 September 2019. (a) CNR; (b) Spectrum width; (c) Skewness; (d) Horizontal wind speed; (e) Horizontal wind direction; (f) Vertical wind speed; (g) log10(TKEDR); (h) Shear intensity

图 24 大气情况的识别结果
Figure 24. Identification results of atmospheric conditions
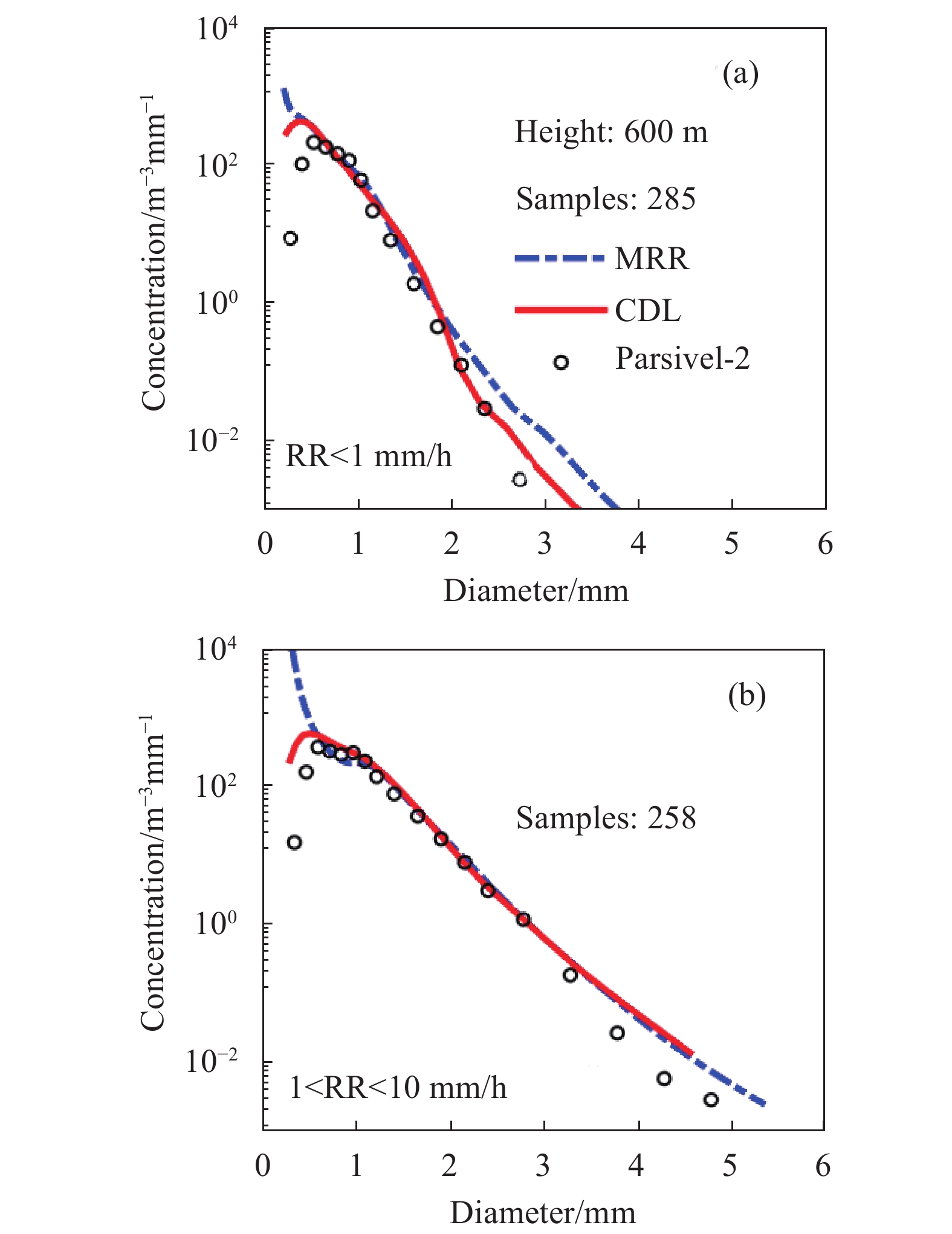
图25展示了激光雷达探测得到不同降雨率时雨滴谱的统计结果。图25(a)(b)分别展示了降雨强度小于1 mm/h和大于1 mm/h小于10 mm/h的雨滴谱分布。对比可以发现,当降雨量增大时,大尺寸雨滴的占比明显增大。降雨时相干激光雷达回波多普勒谱由大气气溶胶信号和雨滴信号谱叠加而成。气溶胶信号谱的展宽项主要为出射激光线宽和湍流。雨信号谱会由于不同大小雨滴的不同下落速度造成额外的多普勒频移展宽。通过对雷达回波多普勒谱的去卷积,可以得到雨滴尺寸分布谱。

图 25 600 m高度处相干探测激光雷达、微波测雨雷达和Parsivel-2雨滴谱仪探测得到的雨滴尺寸分布对比。(a)降水量RR<1 mm/h,(b)降水量1<RR<10 mm/h
Figure 25. Comparisons of the averaged raindrop size distributions between the detection of CDL, MRR and the Parsivel-2. at 600 m Rain rates (a) RR<1 mm/h, (b) 1<RR<10 mm/h conditions
利用该分类方法,图26示出2019年9月19日至20日降水事件时的风雨速的识别和输出。从数据中可以发现,水平风速和雨速有较强的正相关性,这是由于风对雨滴的拖拽效应引起的。由于雨滴比气溶胶重,因此在垂直方向,雨速要远大于风速。

图 26 风和降雨的分别连续观测结果。(a)气溶胶谱宽;(b)水平风速;(c)水平风向;(d)垂直风速;(e)降雨谱宽;(f)水平雨速;(g)水平雨方向;(h)垂直雨速
Figure 26. Separation results of wind and rain. (a) Aerosol spectrum width; (b) Horizontal wind speed; (c) Horizontal wind direction; (d) Vertical wind speed. (e) Rain spectrum width; (f) Horizontal rain speed; (g) Horizontal rain direction; (h) Vertical rain speed
-
随着对红外单光子探测器的深入研究和性能优化,实现了1.5 μm低功率激光器的多参数高性能激光雷达探测。该雷达有以下几个优势:(1)人眼安全,人眼可曝光功率比绿光高6个数量级;(2)全光纤模块化,集成度高,适合大温差、强震动、高盐雾工况下运行;(3)穿透云雾能力强,在恶劣天气下探测能力强;(4)太阳光在红外波段辐照度低,可实现昼夜连续、低噪声探测。技术方面建立了光纤通信、光纤遥感技术和激光雷达技术之间的桥梁,使光通信和光传感技术得以在激光雷达上实用,例如时分复用、波分复用、偏振复用、编码技术。利用这些技术基础,将开发小型化、多功能、多平台运行的1.5 μm激光雷达,在车载、机载和星载平台上对大气环境进行探测和保障。
Development of 1.5 μm lidar for atmospheric detection(Invited)
-
摘要: 激光雷达拥有探测距离远、探测精度高、时空分辨率高、探测参数多样等优点,是大气探测的重要手段。对比常见的可见光波段激光雷达,1.5 μm大气探测激光雷达有独特优势,包括人眼安全、全光纤结构、穿透云雾能力强和昼夜连续探测等。2015年,世界首台单光子频率上转换气溶胶探测激光雷达诞生,实现了6 km距离高时空分辨率的气溶胶分布连续探测。在此之后,1.5 μm大气探测激光雷达在国内外迅速发展。按照探测方式区分,1.5 μm大气探测激光雷达进展分为直接探测激光雷达和相干探测激光雷达两类。直接探测激光雷达包括单光子频率上转换激光雷达、单光子频率上转换测风雷达、超导双频测风激光雷达、超导偏振激光雷达、多模单光子探测云激光雷达和单光子光谱遥感激光雷达。相干探测激光雷达包括偏振探测相干激光雷达、格雷编码相干测风激光雷达和大气多参数探测相干激光雷达。这些雷达的探测目标包括大气气溶胶(云)、能见度、偏振、风廓线、湍流耗散率、气体浓度、降水(雨滴谱),并且单台雷达拥有多参数同时探测的能力。Abstract: Lidar has the advantages of long detection distance, high detection accuracy, high temporal and spatial resolution, and diverse detection parameters, which is an important method for atmospheric detection. Compared with the lidar working at visible wavelength, 1.5 μm atmospheric detection lidar has unique advantages, including eye-safe, all-fiber structure, able to penetrate clouds and fog, and 24 hour continuous detection. In 2015, the world's first single-photon frequency up-conversion aerosol detection lidar was born, achieving continuous detection of aerosol distribution with high spatial and temporal resolution at a distance of 6 km. The representative development of 1.5 μm atmospheric detection lidar in recent years was introduced. In terms of detection methods, direct detection lidar and coherent detection lidar were introduced respectively. Direct detection lidar includes single-photon frequency up-conversion aerosol detection lidar, single-photon frequency up-conversion wind measurement lidar, superconducting dual-frequency wind measurement lidar, superconducting polarization lidar, multimode fiber-coupled single-photon cloud detection lidar and single-photon sensitivity free-space distributed spectral detection lidar. Coherent lidar includes the polarization detection coherent lidar, Golay coding coherent wind lidar and the atmospheric multi-parameter detection coherent lidar. The detection targets of these lidars include atmospheric aerosol (cloud), visibility, polarization, wind profile, gas concentration, precipitation (raindrop size distribution), etc.. Some of them have the ability to detect multiple parameters simultaneously.
-
Key words:
- 1.5 μm lidar /
- aerosol and cloud /
- wind profile /
- TKEDR /
- gas concentration /
- raindrop size distribution
-
图 1 单光子频率上转换激光雷达系统光路图
Figure 1. System layout of the up-conversion single-photon lidar
图 2 (a)连续气溶胶回波信号强度探测;(b)夜间工厂排放记录
Figure 2. (a) Continuous aerosol echo signal detection results; (b) record of factory emission during the night
图 3 采用上转换单光子探测器(UCD)和InGaAs单光子探测器(APD)的性能比较
Figure 3. Comparison between the up-conversion single-photon detector(UCD) and the InGaAs APD
图 4 频率上转换Doppler测风激光雷达系统光路图
Figure 4. Schematic of the frequency up-conversion Doppler wind lidar
图 5 (a)全光纤FPI的透射曲线和反射曲线;(b)连续9组测量的频率响应曲线和典型的Voigt拟合函数
Figure 5. (a) Transmission and reflection curves of FPI; (b) Frequency response functions measured over nine weeks and one typical Voigt fitting curve
图 6 连续48 h观测的风场和能见度时空分布图(a)水平风速;(b)水平风向
Figure 6. Forty-eight-hour observation of atmospheric wind and visibility. (a) Horizontal wind speed; (b) Horizontal direction
图 7 两种双边缘技术:(a)双通道FPI;(b)双频脉冲激光
Figure 7. Double-edge technique that adopts: (a) a double-channel FPI; (b) a dual-frequency laser pulse
图 8 1 h观测的结果(a)纬向风、(b)经向风、(c)水平风速和(d)水平风向
Figure 8. One-hour observation results (a) zonal wind, (b) meridional wind, (c) horizontal wind speed, and (d) horizontal wind direction
图 9 (a)超导偏振激光雷达系统光路图;(b)雷达接收机校准光路
Figure 9. (a) Optical layout of the superconduction polarization lidar; (b) calibration layout of the lidar receiver
图 10 连续48 h偏振雷达观测结果(a)回波信号强度分布;(b)退偏比分布
Figure 10. 48 h continuous polarization lidar measurement results of (a) backscattering intensity and (b) the LDR
图 11 (a)实验光路;(b)1.5 μm InGaAs/InP单光子探测激光雷达照片
Figure 11. Experimental setup (a) and photo (b) of the 1.5 μm lidar using free running InGaAs/InP SPD
图 12 多模接收的激光雷达的多层云距离修正回波信号
Figure 12. Range corrected signal of multi-layer clouds using the MMF receiver
图 13 单光子分布式自由空间光谱激光雷达。(a)光路图;(b)光束与大气作用示意图;(c)时分复用时序图
Figure 13. Single-photon distributed free-space spectroscopy. (a) Optical layout; (b) Schematic of lights propagating in the atmosphere; (c) Time sequence of the time-division multiplexing technique
图 14 回波信号和光谱。(a)探测通道信号;(b)无气体吸收的参考通道信号;(c)不同距离处光学深度;(d) 4 km处吸收光谱的洛伦兹拟合结果
Figure 14. Backscattering signals and spectra. (a) The probe signal; (b) Reference signal without gas absorption; (c) Optical depth at different distance; (d) Lorentz fitting of the range-resolved spectrum at 4 km
图 15 连续观测结果(a)二氧化碳浓度分布;(b) HDO浓度;(c)载噪比;(d)水平风速;(e)水平风向;(f)与点式二氧化碳探测器浓度对比
Figure 15. Results of continuous observation. (a) CO2 concentration; (b) HDO concentration; (c) CNR; (d) Horizontal wind speed; (e) horizontal wind direction; (f) Point CO2 detector concentration comparison
图 16 (a)偏振相干多普勒激光雷达光路图;(b)校准光路图
Figure 16. (a) Optical layout of the polarization coherent Doppler lidar; (b) Optical layout of calibration
图 17 单个平衡探测器探测的S和P偏振态回波信号风速
Figure 17. Wind velocity retrieved from both S and P states backscattering by single balanced detector
图 18 偏振相干多普勒激光雷达测得的(a) S偏振态的载噪比分布;(b) P偏振态的载噪比分布;(c)退偏比分布
Figure 18. (a) CNR distribution of S states, (b) CNR distribution of P states and (c) distribution of depolarization ratio measured by the polarization CDL
图 19 编码相干测风激光雷达光路图。CW,连续波激光器;AOM,声光调制器;EOM,电光调制器;AWG,任意波形发生器;EDFA,掺铒光纤放大器;BS,分束器;BD,平衡探测器;ADC,模数转换器
Figure 19. Optical layout of the coding CDWL. CW, continuous-wave laser; AOM, acoustic–optic modulator; EOM, electro-optic modulator; AWG, arbitrary waveform generator; EDFA, erbium-doped fiber amplifier; BS, beam splitter; BD, balanced detector; ADC, analog-to-digital converter
图 20 激光脉冲序列。(a)格雷编码种子光输出;(b)无反馈调制的激光脉冲放大输出;(c)反馈调制后的格雷编码种子光输出;(d)反馈调制后的激光脉冲放大输出;(e)脉冲时域(d)的放大示意图
Figure 20. Laser pulse sequence. (a) Golay coding seed laser output; (b) Amplified laser sequence without feedback control; (c) Modulated Golay coding seed laser output; (d) Amplified laser sequence output with feedback control; (e) Enlarged waveform of (d)
图 21 (a)非编码和(b)格雷编码相干多普勒测风激光雷达回波信号功率谱分布
Figure 21. Power spectra distribution of (a) noncoding CDWL; (b) Golay coding CDWL
图 22 云、降水、湍流和风切变的识别过程
Figure 22. Identification procedure of cloud, precipitation, turbulence, and wind shear
图 23 2019年9月19至20日间一次降雨过程中的连续观测结果。(a)载噪比;(b)谱宽;(c)偏度;(d)水平风速;(e)水平风向;(f)垂直风速;(g)对数湍流耗散率;(h)切变强度
Figure 23. A precipitation process observed by the CDWL during 19-20 September 2019. (a) CNR; (b) Spectrum width; (c) Skewness; (d) Horizontal wind speed; (e) Horizontal wind direction; (f) Vertical wind speed; (g) log10(TKEDR); (h) Shear intensity
图 25 600 m高度处相干探测激光雷达、微波测雨雷达和Parsivel-2雨滴谱仪探测得到的雨滴尺寸分布对比。(a)降水量RR<1 mm/h,(b)降水量1<RR<10 mm/h
Figure 25. Comparisons of the averaged raindrop size distributions between the detection of CDL, MRR and the Parsivel-2. at 600 m Rain rates (a) RR<1 mm/h, (b) 1<RR<10 mm/h conditions
图 26 风和降雨的分别连续观测结果。(a)气溶胶谱宽;(b)水平风速;(c)水平风向;(d)垂直风速;(e)降雨谱宽;(f)水平雨速;(g)水平雨方向;(h)垂直雨速
Figure 26. Separation results of wind and rain. (a) Aerosol spectrum width; (b) Horizontal wind speed; (c) Horizontal wind direction; (d) Vertical wind speed. (e) Rain spectrum width; (f) Horizontal rain speed; (g) Horizontal rain direction; (h) Vertical rain speed
-
[1] Hua Dengxin, Uchida M, Kobayashi T. Ultraviolet high-spectral-resolution Rayleigh–Mie lidar with a dual-pass Fabry-Perot etalon for measuring atmospheric temperature profiles of the troposphere [J]. Optics Letters, 2004, 29(10): 1063-1065. doi: 10.1364/OL.29.001063 [2] Bu Lingbing, Zhu Yazong, Shan Kunling, et al. Development of probe of cloud droplet [J]. Infrared and Laser Engineering, 2011, 40(10): 1923-1927. (in Chinese) [3] Chen Weibiao, Zhou Jun, Liu Jiqiao, et al. Doppler lidar and it’s all solid-state single frequency laser [J]. Infrared and Laser Engineering, 2008, 37(1): 57-60. (in Chinese) [4] Xian Jinhong, Sun Dongsong, Xu Wenjing, et al. Urban air pollution monitoring using scanning Lidar [J]. Environmental Pollution, 2020, 258: 113696. (in Chinese) doi: 10.1016/j.envpol.2019.113696 [5] Wang Jie, Liu Wenqing, Liu Cheng, et al. The determination of aerosol distribution by a no-blind-zone scanning Lidar [J]. Remote Sensing, 2020, 12(4): 626. (in Chinese) doi: 10.3390/rs12040626 [6] Liu Zhishen, Liu Bingyi, Wu Songhua, et al. High spatial and temporal resolution mobile incoherent Doppler lidar for sea surface wind measurements [J]. Optics Letters, 2008, 33(13): 1485-1487. doi: 10.1364/OL.33.001485 [7] Xia Haiyun, Dou Xiankang, Sun Dongsong, et al. Mid-altitude wind measurements with mobile Rayleigh Doppler lidar incorporating systemlevel optical frequency control method [J]. Optics Express, 2016, 20(4): 15286-15300. [8] Xia Haiyun, Dou Xiankang, Shangguan Mingjia, et al. Stratospheric temperature measurement with scanning Fabry-Perot interferometer for wind retrieval from mobile Rayleigh Doppler lidar [J]. Optics Express, 2014, 22(18): 21775-21789. doi: 10.1364/OE.22.021775 [9] Qiu Jiawei, Xia Haiyun, Dou Xiankang, et al. Optimization of scanning Fabry-Perot interferometer in the high spectral resolution lidar for stratospheric temperature detection [J]. Optical Engineering, 2016, 55(8): 084107. doi: 10.1117/1.OE.55.8.084107 [10] Yu Chao, Shangguan Mingjia, Xia Haiyun, et al. Fully integrated free-running InGaAs/InP single-photon detector for accurate lidar applications [J]. Optics Express, 2017, 25(13): 14611-14620. doi: 10.1364/OE.25.014611 [11] Shang Xiang, Xia Haiyun, Dou Xiankang, et al. Adaptive inversion algorithm for 1.5 μm visibility lidar incorporating in situ Angstrom wavelength exponent [J]. Optics Communications, 2018, 418: 129-134. doi: 10.1016/j.optcom.2018.03.009 [12] The Optical Society, Light-based method improves practicality and quality of remote wind measurements258 [N/OL]. OSA News Release, 2017-09-06. [13] Xia Haiyun, Sun Dongsong, Shen Fahua, et al. Direct detection Doppler wind lidar with twin-channel Fabry-Perot interferometer [J]. Infrared and Laser Engineering, 2006, 35: 273-278. (in Chinese) [14] Shanguan Mingjia, Wang Chong, Xia Haiyun, et al. Brillouin optical time domain reflectometry for fast detection of dynamic strain incorporating double-edge technique [J]. Optics Communications, 2017, 398: 95-100. doi: 10.1016/j.optcom.2017.04.033 [15] Xia Haiyun, Shentu Guoliang, Shangguan Mingjia, et al. Long-range micro-pulse aerosol lidar at 1.5 μm with an upconversion single-photon detector [J]. Optics Letters, 2015, 40(7): 1579-1582. doi: 10.1364/OL.40.001579 [16] Xia Haiyun, Shangguan Mingjia, Dou Xiankang, et al. Micro-pulse upconversion Doppler lidar for wind and visibility detection in the atmospheric boundary layer [J]. Optics Letters, 2016, 41(22): 5218-5221. doi: 10.1364/OL.41.005218 [17] Xia Haiyun, Sun Dongsong, Dong Jingjing, et al. Illumination effects on the dual Fabry-Perot etalon based Doppler wind lidar [J]. Infrared and Laser Engineering, 2007, 36(3): 377-381. (in Chinese) [18] Shangguan Mingjia, Xia Haiyun, Wang Chong, et al. et al. Dual-frequency Doppler lidar for wind detection with a superconducting nanowire single-photon detector [J]. Optics Letters, 2017, 42(18): 3541-3544. doi: 10.1364/OL.42.003541 [19] Qiu Jiawei, Xia Haiyun, Dou Xiankang, et al. Micro-pulse polarization lidar at 1.5 μm using a single superconducting nanowire single photon detector [J]. Optics Letters, 2017, 42(21): 4454-4457. doi: 10.1364/OL.42.004454 [20] Yu Chao, Qiu Jiawei, Xia Haiyun, et al. Compact 1.5 μm cloud lidar with a multi-mode fiber coupling free-running InGaAs/InP single-photon detector [J]. Review of Scientific Instruments, 2018, 89: 103106. doi: 10.1063/1.5047472 [21] Zhang Zhen, Xia Haiyun, Yu Saifen, et al. Femtosecond imbalanced time-stretch spectroscopy for ultrafast gas detection [J]. Applied Physics Letters, 2020, 116: 171106. doi: 10.1063/1.5143790 [22] Abari C, Chu Xinzhao, Hardesty Michael, et al. A reconfigurable all-fiber polarization-diversity coherent Doppler lidar: principles and numerical simulations [J]. Applied Optics, 2015, 54: 8999-9009. doi: 10.1364/AO.54.008999 [23] Wang Chong, Xia Haiyun, Shangguan Mingjia, et al. 1.5 µm polarization coherent lidar incorporating time-division multiplexing [J]. Optics Express, 2017, 25(17): 20663-20674. doi: 10.1364/OE.25.020663 [24] Wang Chong, Xia Haiyun, Liu Yanping, et al. Spatial resolution enhancement of coherent Doppler wind lidar using joint time-frequency analysis [J]. Optics Communications, 2018, 424: 48-53. doi: 10.1016/j.optcom.2018.04.042 [25] Wang Chong, Xia Haiyun, Wu Yunbin, et al. Meter-scale spatial resolution coherent Doppler wind lidar based on golay coding [J]. Optics Letters, 2019, 44(2): 311-314. doi: 10.1364/OL.44.000311 [26] Wang Chong, Jia Mingjiao, Xia Haiyun, et al. Relationship analysis of PM2.5 and boundary layer height using an aerosol and turbulence detection lidar [J]. Atmospheric Measurement Techniques, 2019, 12(6): 3303-3315. (in Chinese) doi: 10.5194/amt-12-3303-2019 [27] Wei Tianwen, Xia Haiyun, Wu Yunbin, et al. Inversion probability enhancement of all-fiber CDWL by noise modeling and robust fitting [J]. Optics Express, 2020, 28(20): 29662-29675. doi: 10.1364/OE.401054 [28] Wei Tianwen, Xia Haiyun, Hu Jianjun, et al. Simultaneous wind and rainfall detection by power spectrum analysis using a VAD scanning coherent Doppler lidar [J]. Optics Express, 2019, 27(22): 31235-31245. doi: 10.1364/OE.27.031235 [29] Yuan Jinlong, Xia Haiyu, Wei Tianwen, et al. Identifying cloud, precipitation, windshear, and turbulence by deep analysis of power spectrum of coherent Doppler wind lidar [J]. Optics Express, 2020, 28(25): 37406-37418. doi: 10.1364/OE.412809 -

 点击查看大图
点击查看大图

计量
- 文章访问数: 1020
- HTML全文浏览量: 564
- PDF下载量: 279
- 被引次数: 0



