








-
舰船目标检测是海洋监视的重要手段之一,其在维护国家安全、海上交通、污染治理、边境管理等方面都有广泛的应用。利用高空间分辨率(以下简称高分辨率)光学遥感卫星影像对海面舰船目标进行探测、发现和识别是舰船目标检测的一个重要手段。舰船目标识别方法的研究和效果评估需要多样性数据样本,但不同类型船只在不同海况、不同海域、不同航行状态、不同光照及观测条件下的高分辨率卫星图像难以针对获取。因此,在舰船目标检测和识别方法研究及效果评估方面,海上目标的光学成像仿真研究具有较好的应用前景。然而,海面舰船目标光学成像仿真研究在公开文献中并不多见。Yao Y等[1]在2016年模拟了不同海况、不同云类型及不同目标的GaoFen-1和GaoFen-2卫星成像效果。其仿真方法是基于图像合成,先收集该卫星的历史数据,提取其中的船只、云等目标图片,直接添加到需要仿真的海况卫星数据上,形成需要的仿真结果。仿真结果并未与实测图像进行定量对比验证,从视觉效果上具有一定的真实感。
目前,具有较高可信度的光学遥感成像仿真方主要还是严格依据从地表反射辐射经大气传输到达遥感器入瞳,经光电系统调制输出结果的物理过程,模拟计算了辐射量变化及光电转换结果。而对于海面目标,海面波浪起伏、目标与海水交互作用形成的波纹、尾迹和空化泡沫等动态过程,为计算海表的反射辐射场造成困难,也是基于辐射传输的海面目标成像仿真难点所在。近年来,基于计算流体力学(Computational Fluid Dynamics,CFD)的船舶流场建模以及海水光学辐射特性方面的研究为海面目标光学辐射场建模提供了可借鉴和利用的相关基础。张志荣等[2]对水面船舶绕流场进行了数值模拟,并将兴波波形与实验进行对比,验证了CFD在船舶流场模拟方面的可行性;王展志等[3]结合RANS方程和RNG k-ω湍流模型对三种船体进行了三维粘性流场数值模拟;黄德波等[4]基于RANS方法结合VOF多项流模型分别对单体船和三体船进行了自由面波形以及船尾轴向伴流进行了模拟。Chang Huaixin等[5]采用有限体积法模拟了包括兴波的三维船体周围的粘性流场,且计算结果与实验结果吻合较好。在船行波及尾部湍流的辐射特性方面,Zhang、Lewis等[6-7]对不同水体含气泡船舶尾迹海水的反射率特征进行了研究;张建生[8]、王江安[9]、纪延俊[10]等对尾流中气泡在水下的光学散射特性进行了相关研究。因海水本身的极化现象非常明显,镜面反射的出射方向与海面法向方向密切相关,而海水三维结构的扰动会改变海表小波面的法向朝向,从而改变海水的镜面反射方向,进而导致出射辐射场亮度分布的变化。船体与海水碰撞后,除了会产生海水的波面起伏外,还会产生一定的泡沫,泡沫相对于海水来说反射率要更高,也会对海面出射辐射产生一定的改变。但对于船舶航行流场的研究主要集中在计算船只在航行中的阻力情况,以优化船体外形流体设计,并没有考虑其光学辐射特性。对于船行波的辐射特性研究只是对含泡沫水体的反射率进行了测量,并未考虑船行波及尾流三维结构动态变化的特性以及该变化所带来的辐射调制作用。因此对于二者的研究都是割裂和独立的,并没有考虑二者耦合带来的变化。
文中提出的海洋目标高空间分辨率成像仿真方法,重点对高分辨率下可呈现的海面目标与海水耦合作用和成像过程模拟方法进行了研究。通过CFD的方法建立了特定船体结构在不同航行状态下与海面耦合所产生的航行流场的三维模型,通过映射的方法将船舶伴流场的辐射特性与其三维结构关联,形成舰船与背景耦合流场的整体辐射分布模型,利用光线追踪技术模拟光线在场景内部的多次反射,得到场景的出射辐射场,模拟了大气的辐射传输和邻近效应作用以及传感器系统调制,得到不同情况下高分辨率卫星海面目标成像结果,可以为海面目标检测效能评估提供有力的数据支撑。
-
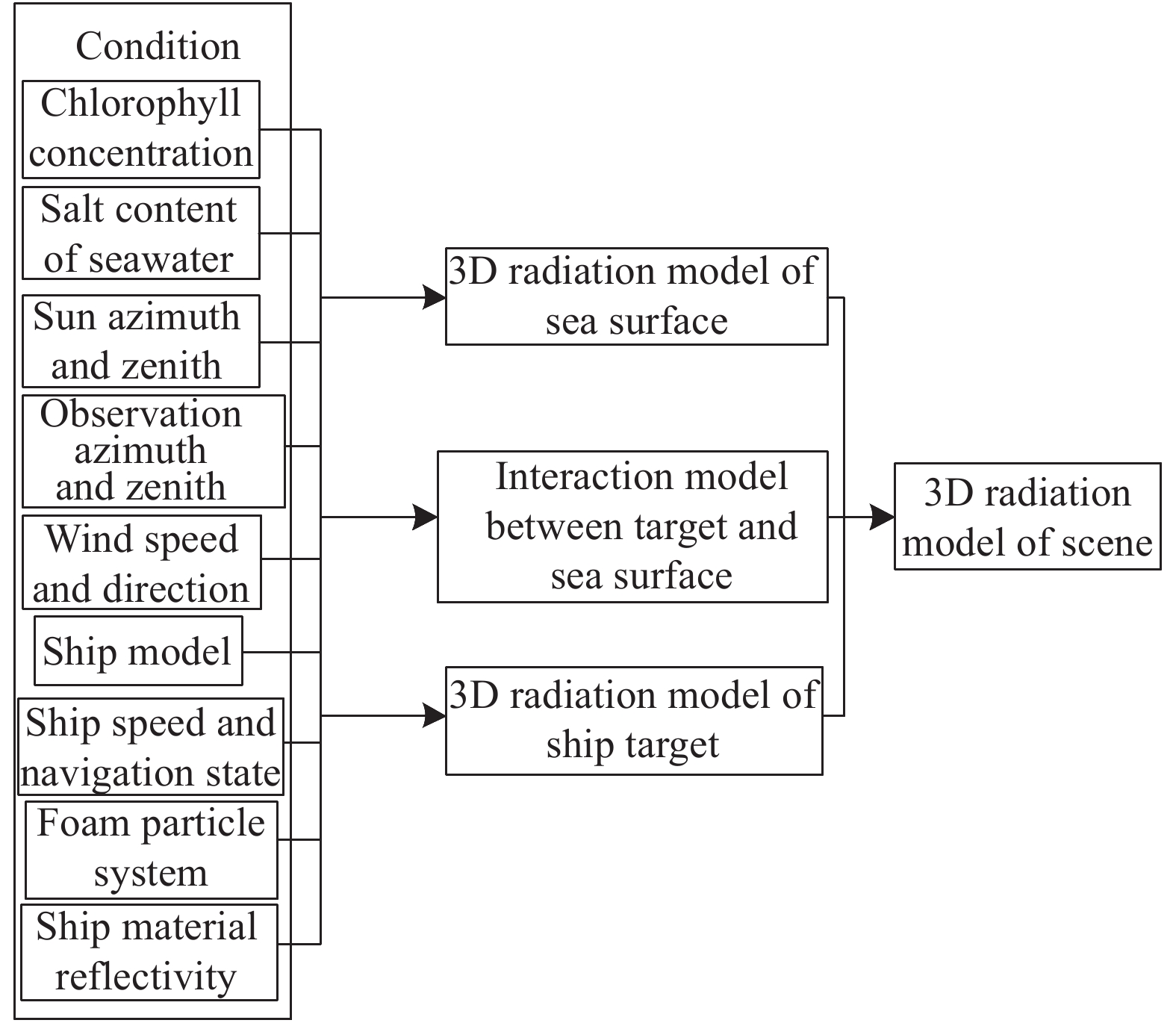
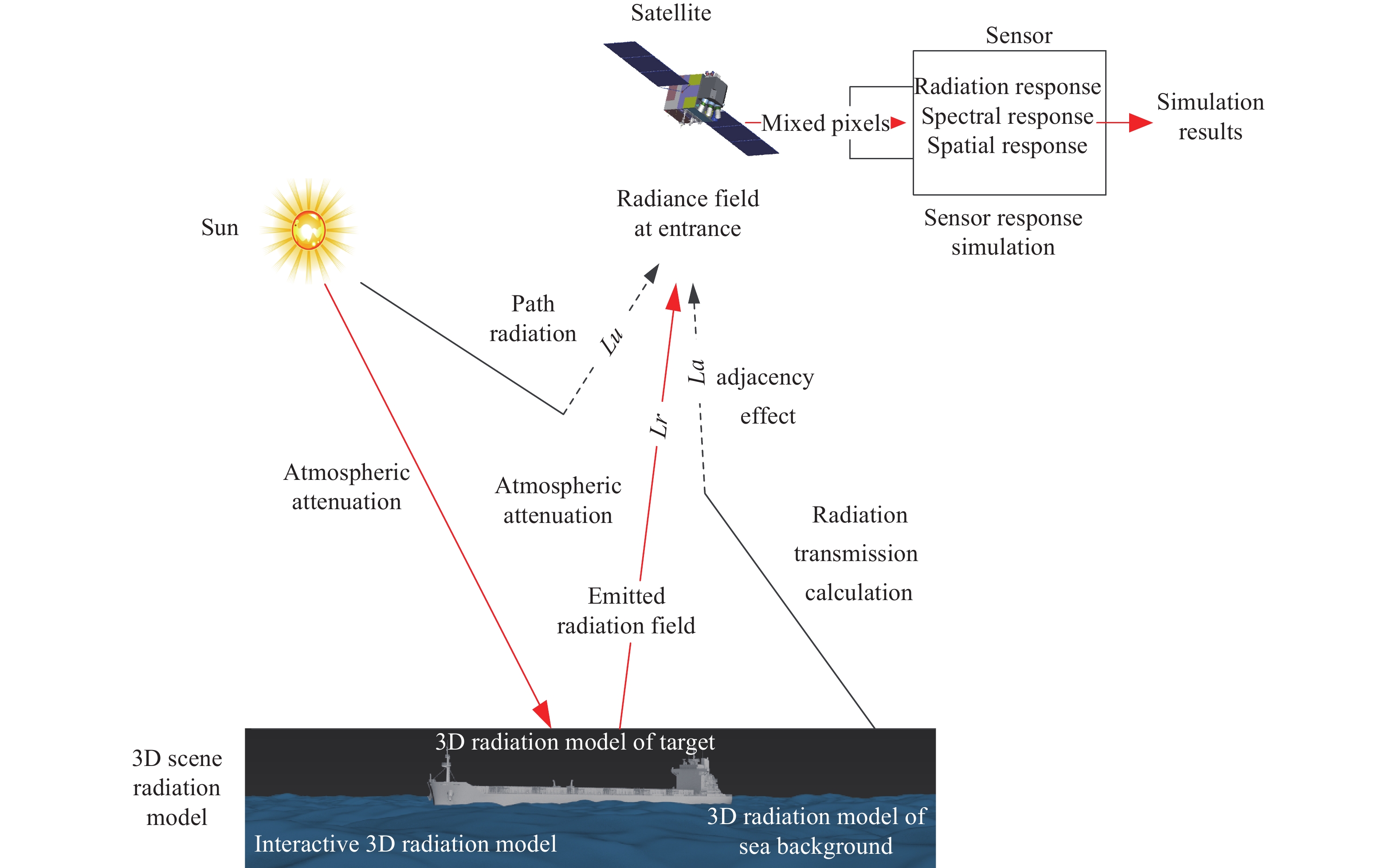
海面目标高分辨率卫星成像仿真,首先需要构建海面、船只以及二者交互形成的流场的精细几何模型,添加各组分的方向辐射特性,形成海面目标场景的辐射特性模型。然后根据光照及观测条件计算出零视距辐射场,再根据大气条件,利用辐射传输模型和蒙特卡洛方法模拟大气的衰减及邻近效应,得到卫星入瞳处的辐射场,最后模拟传感器的辐射响应、空间响应及光电响应,得到仿真结果。整体仿真流程如图 1所示。
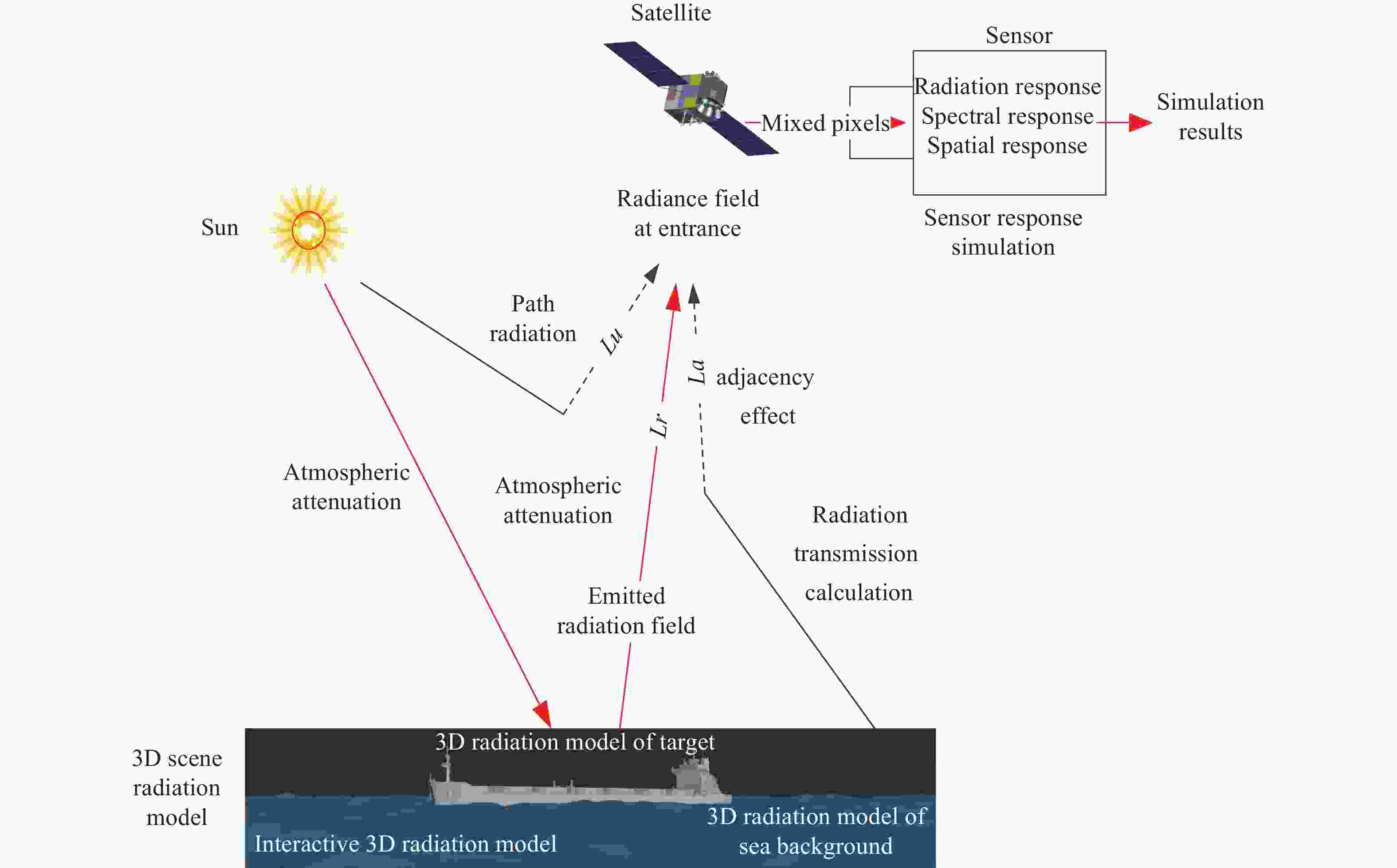
图 1 卫星成像仿真总流程示意图
Figure 1. General flow chart of satellite imaging simulation
-
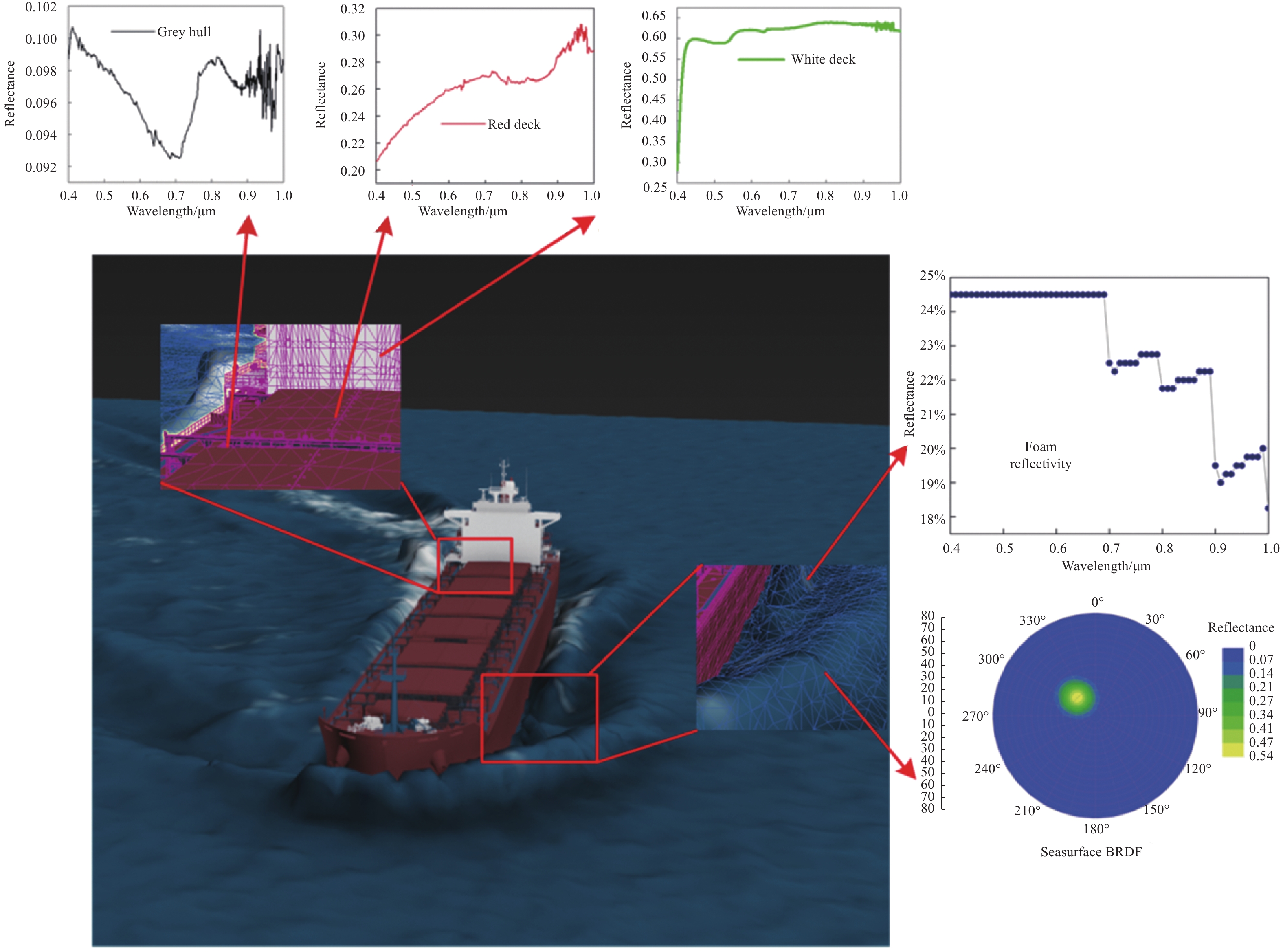
针对目标及海面综合场景的建模,首先需要建立海面目标场景的三维辐射特性模型。海面目标场景三维辐射特性模型的构建如图 2所示,可以分为三个部分:海面背景辐射特性建模,包括海面几何模型、海面组分分布划分及海水反射特性映射;目标辐射特性建模,包括船只几何模型和船体反射特性映射;目标与海水耦合流场辐射特性建模,包括流场几何形态、空化产生的组分不均匀分布以及流场中各组分反射特性映射。最终得到目标与背景耦合作用下的方向反射率分布模型。

图 2 海面场景三维辐射模型构建示意图
Figure 2. Construction of 3D radiation model of sea scene
-
海面三维辐射模型的构建,首先需要根据海水的叶绿素浓度、风速、含盐量、太阳及观测几何条件,利用OCEABRDF模型计算海水的方向反射率及泡沫的反射率信息,建立海面各组分的辐射特性模型,然后根据风速及风向利用海浪模型构建海面三维几何结构,将二者以材质纹理映射的方式相关联,形成三维海面辐射模型,其流程如图 3所示。

图 3 海面背景建模示意图
Figure 3. Schematic diagram of sea background modeling
采用基于FFT(Fast Fourier Transform)的频谱分析方法,根据海面的实测风速,通过计算海浪的频谱函数得到多个频率、振幅对应的正余弦波,并利用FFT算法计算空间域下的海浪顶点高度[11]。X=(x,y)表示海面网格上的一点,其在t时刻的高度记为h(X,t),则其表达式为:
$$ \left\{ {\begin{array}{*{20}{l}} {h(X,t) = \displaystyle\sum\limits_K {\tilde h} (K,t){\rm{exp}}(iK \cdot X)}\\ {\tilde h(K,t) = {{\tilde h}_0}(K){\rm{exp}}[i\omega (K)t] + \tilde h_0^*( - K){\rm{exp}}[ - i\omega (K)t]}\\ {{\omega ^{\rm{2}}}\left( K \right) = gk = g\sqrt {k_x^2 + k_y^2} }\\ {{{\tilde h}_0}(K) = \left( {{\varepsilon _r} + i{\varepsilon _i}} \right)\sqrt {Ph(K)/2} }\\ {Ph(K) = A\dfrac{{{\rm{exp}}[ - 1/{{(kL)}^2}]}}{{{k^4}}}{{\left| {\dfrac{{K \cdot u}}{{kU}}} \right|}^2}} \end{array}} \right.$$ (1) 式中:波数向量K=(kx,ky)=(kcosθ,ksinθ),其中k=|K|=
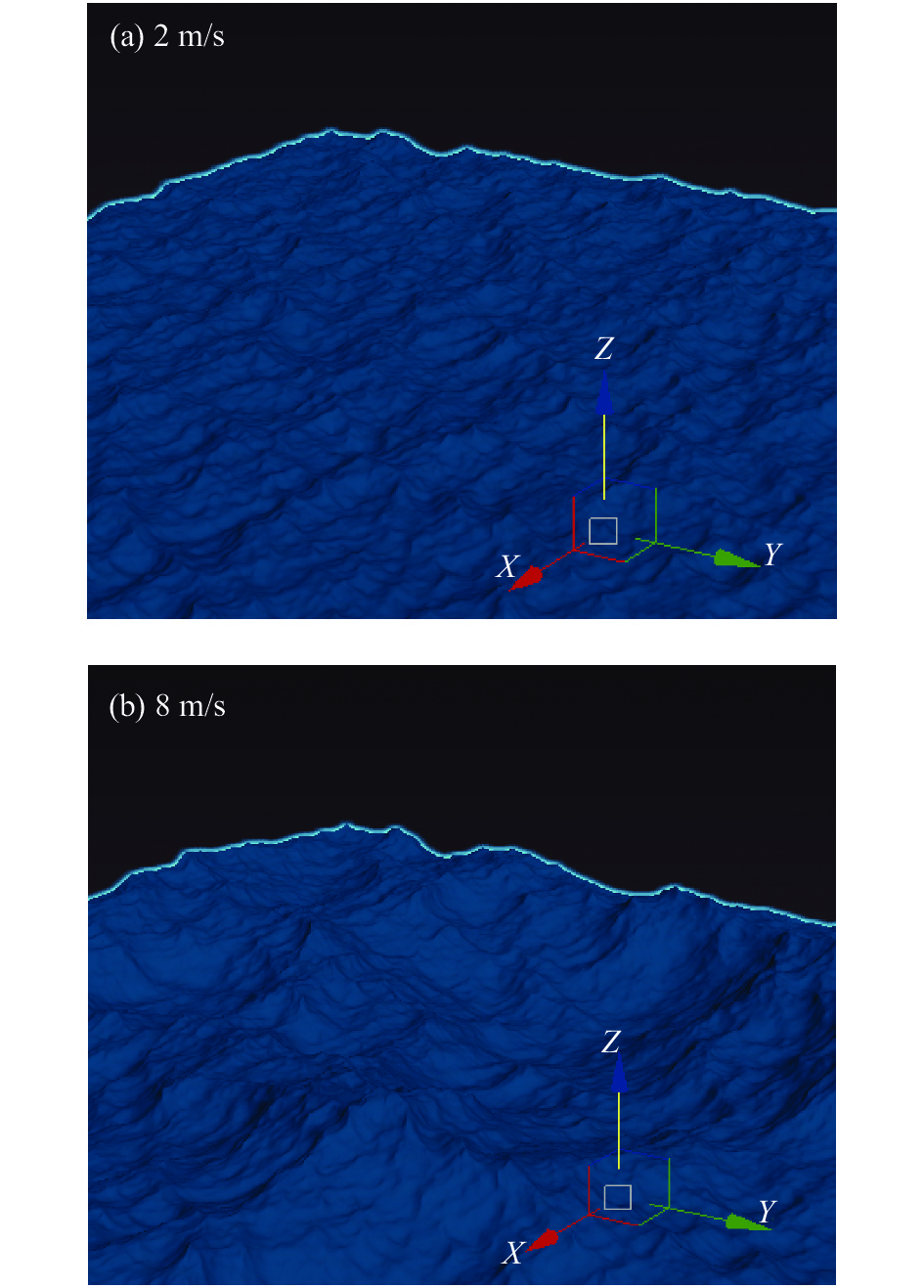
$\sqrt {k_x^2 + k_y^2} $ ,θ为向量K与x轴正半轴的夹角;$\tilde h(K,t)$ 表示振幅的傅里叶分量;A为常数;$L = {U^2}/g$ ;u=(Ucosα,Usinα),其中U为风速大小,α为风向。将不同海面风速及风向参数代入公式(1)中,得到海面上任一位置X(x, y)在t时刻的高度h(x, t)。图4为利用海浪网格模型生成面片数为1024×1024、单元尺寸大小为0.5 m的海面三维网格模型。

图 4 不同风速下的海面三维结构
Figure 4. 3D structure of sea surface under different wind speeds
对海面三维几何网格的各个面片指定海面反射特性。动态海面因海浪作用会出现呈高反射率特征的泡沫,因此各面片指定的组分属性有海水和白帽(泡沫)两种,其出现概率为
$W = {2.9510^{ - 6}}\;{{w}}{{{s}}^{3.52}}$ ,ws为风速,单位m/s[12]。根据Koepke (1984)的描述,白帽反射率的计算方法如公式(2)所示:$${\rho _{{\rm{ef}}}}(\lambda ) = \frac{{{\rho _{{\rm{wc}}}}(\lambda )}}{W}$$ (2) 由公式(2)可以看出,白帽的有效反射率 ρef(λ)只与波长λ有关,与观测角度等其他变量无关,则认为其为朗伯体,各方向反射相同。
海水和水面泡沫的反射率由于难以利用光谱测量手段实地获取,其反射率光谱数据基于6S (Second Simulation of the Satellite Signal in the Solar Spectrum)中的OCEABRDF模型计算获得。该模型通过输入风速风向、海水含盐量、叶绿素浓度及太阳和观测角度,可以得到白帽、耀斑及水体的反射率光谱。利用OCEABRDF模型,分别计算了不同观测角及方位角度下组成海面辐射的白帽、水体及耀斑的反射率值[13]。其中计算所需要的风速及风向参数可以从Weather Underground (
www.wunderground.com )网站获取,叶绿素浓度值可从MODIS (Moderate Resolution Imaging Spectroradiometer)的产品中获取,海水的含盐量可以从中国Argo (Array for real-time geostrophic oceanography)实时海洋观测网(www.argo.org.cn )获取。模型的输入参数如表 1(1 ppt=10−12)所示。表 1 OCEABRDF输入参数表
Table 1. OCEABRDF input parameter table
Parameter Value Wind speed/m·s−1 1.78 Wind direction N Salt content/ppt 34.2 Chlorophyll concentration/mg·m−3 0.1 Sun zenith 17.18 Sun azimuth 103.6 通过计算,获取了海面无泡沫覆盖区域在太阳天顶角为17.18°,太阳方位角为103.6°时的水体450~900 nm波段的方向反射信息(图 5)及泡沫反射率光谱(图 6)。

图 5 OCEABRDF模型计算的海水无泡沫覆盖区域的方向反射率
Figure 5. Directional reflectance of seawater without foam covering area calculated by OCEABRDF model

图 6 海面泡沫反射率光谱
Figure 6. Reflectivity spectrum of sea surface foam
-
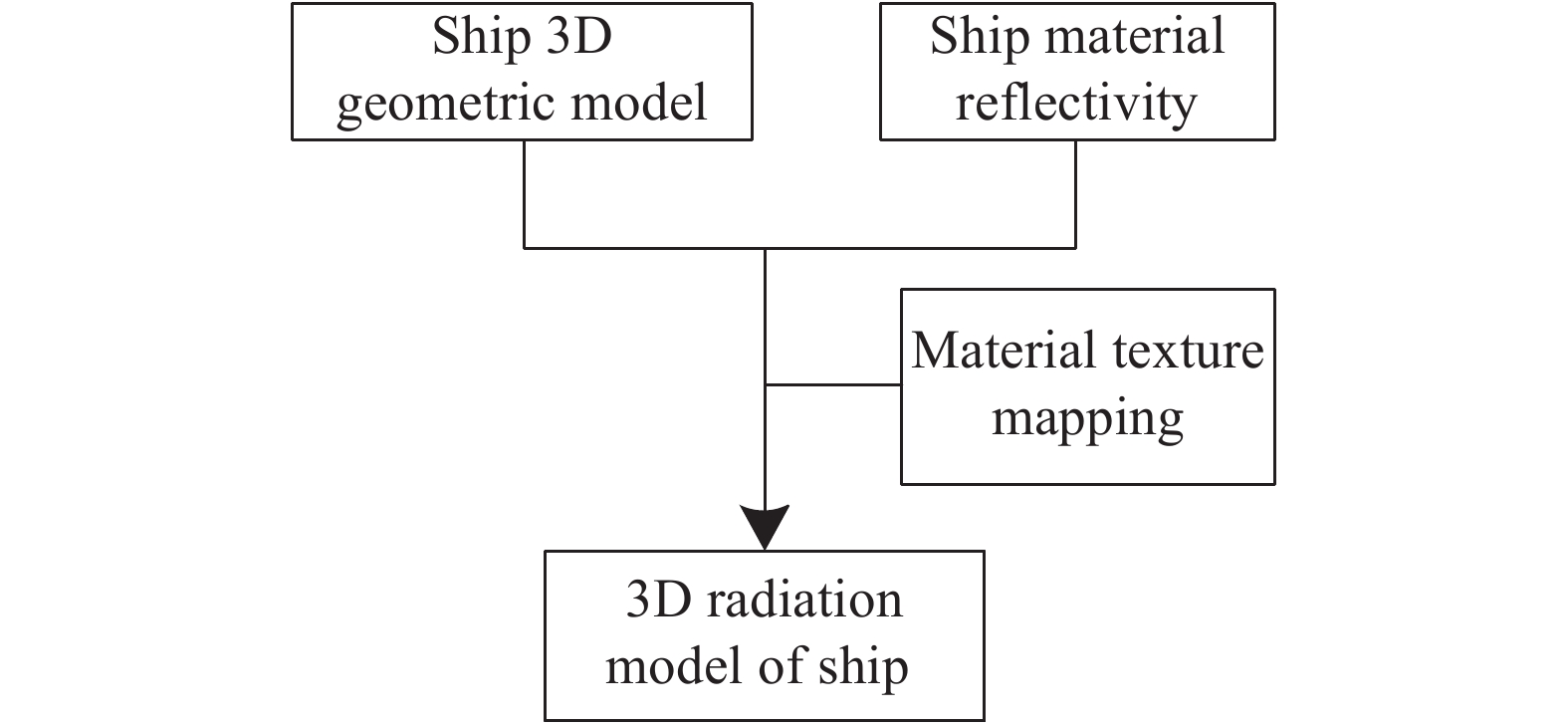
海面目标即目标船只的模型构建,是以纹理贴图映射的方式将地物光谱库中的反射率信息与船只三维模型的纹理相关联映射,形成目标的三维辐射模型,其流程如图7所示。

图 7 海面目标建模示意图
Figure 7. Modeling sketch of sea surface target
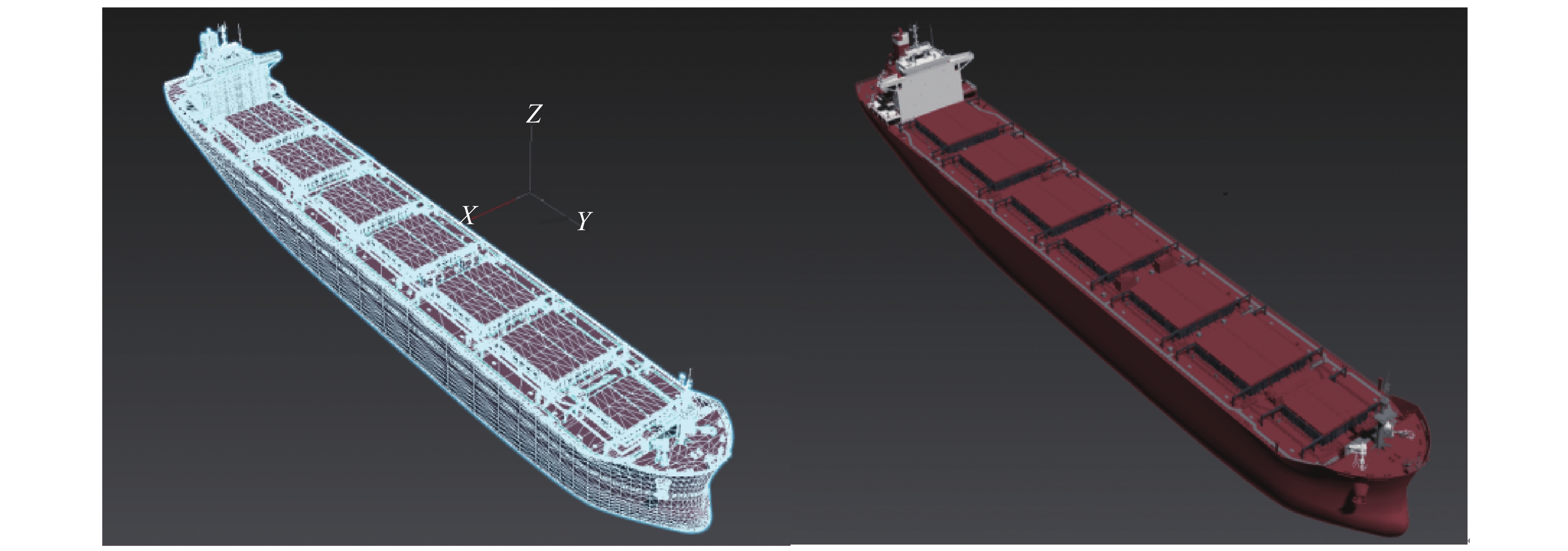
选取的船只目标模型是港口比较常见的一种型号的散货船(Capesize bulk carrier),其三维模型如图 8所示,模型信息如表 2所示。模型共计949732个面片,平均面片尺寸小于0.5 m2,不同面片分别映射船体甲板、船舷、舰桥等表面光谱反射率。

图 8 货船三维模型
Figure 8. 3D model of cargo ship
表 2 货船模型信息
Table 2. Cargo ship model information
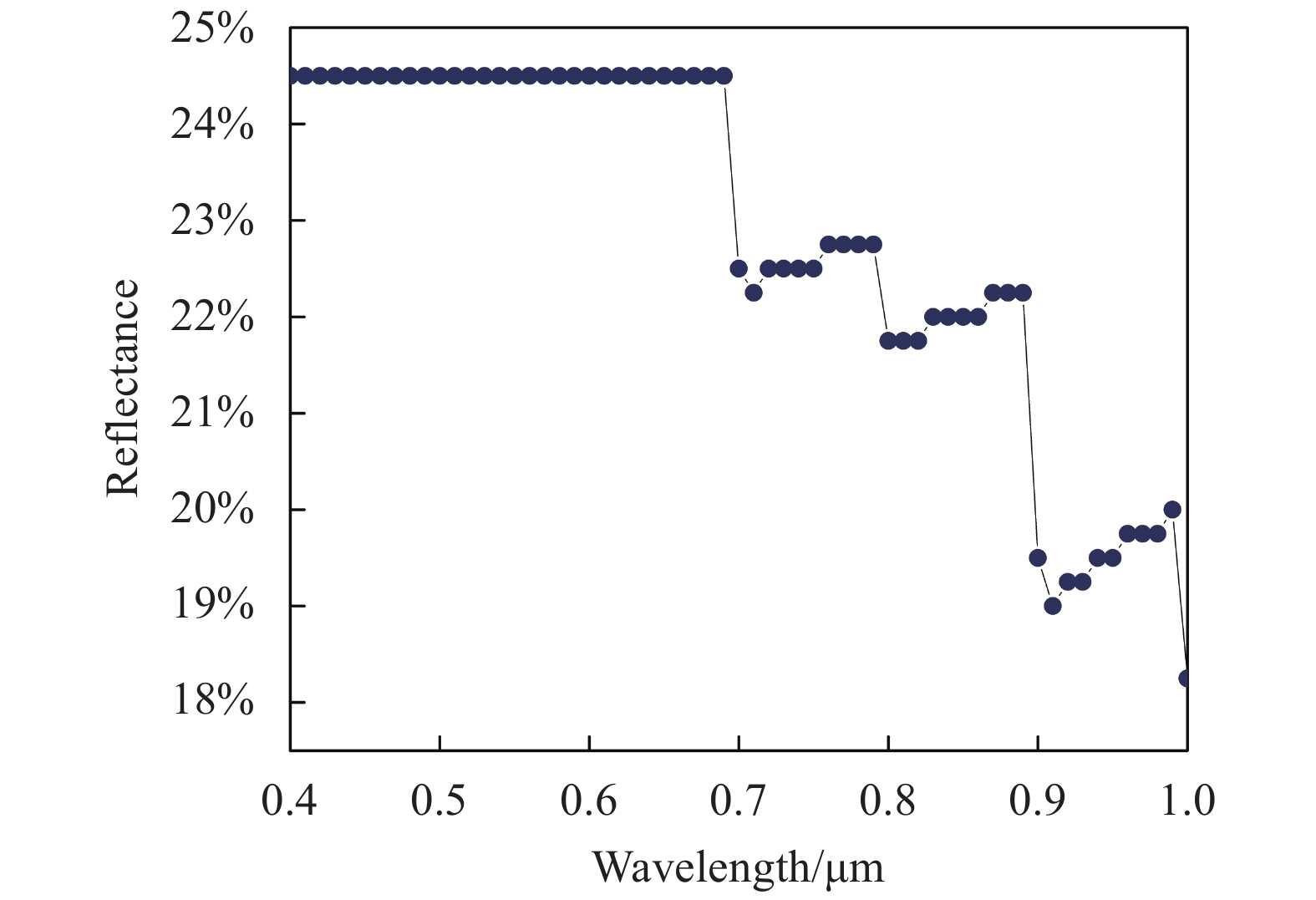
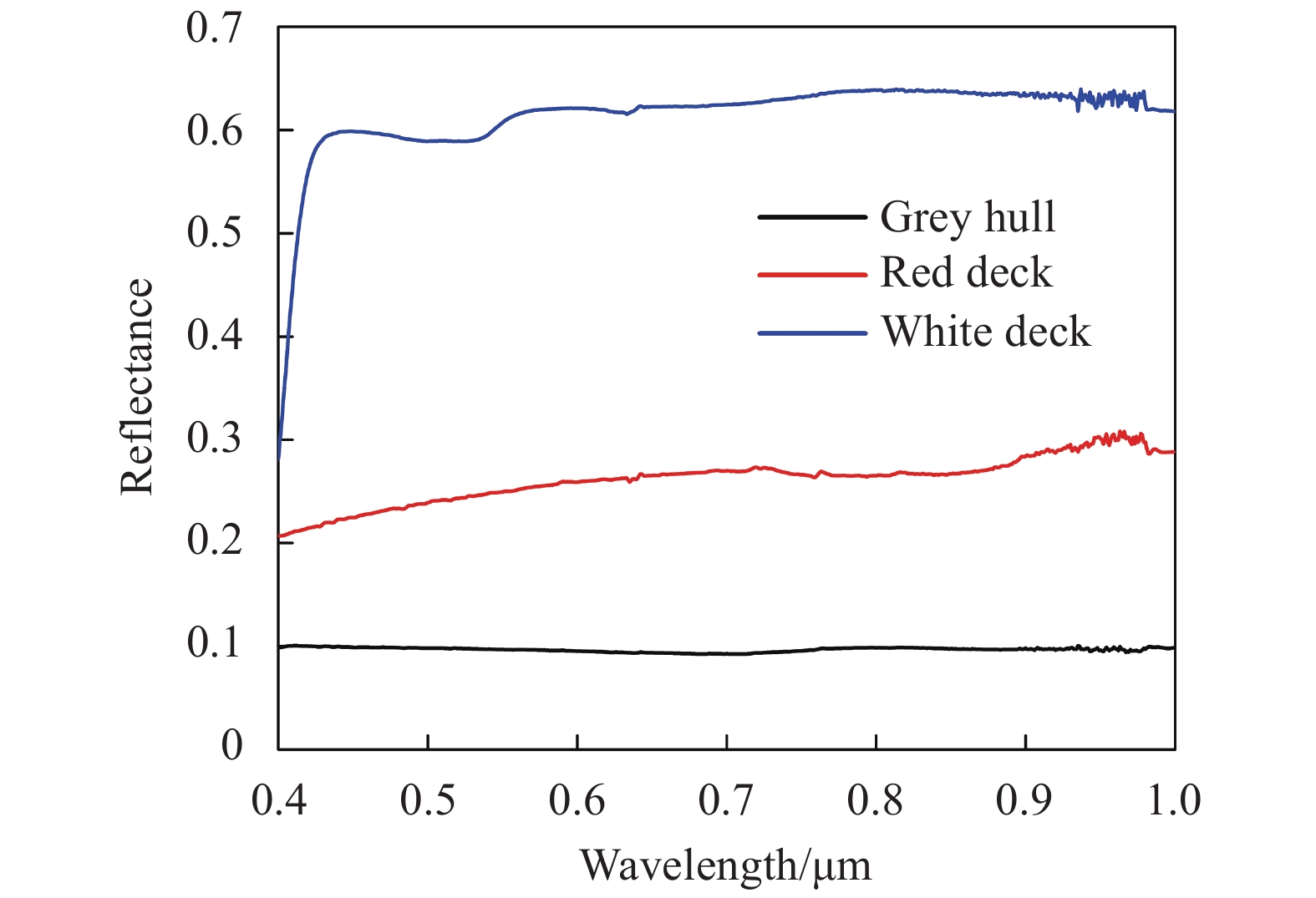
Overall length/m Molded breadth/m Depth moulded/m Full load draft/m Number of patches Number of vertices 274 46 24.2 17.1 949732 532336 对于船只本身的反射率信息,根据卫星多通道的反射率反演结果,在地物光谱数据库中选择与之相媲美的钢板或涂料材质反射率光谱作为目标的反射率信息,部分主要反射率信息如图 9所示。利用参考文献[14]中描述的材质纹理映射技术将船体反射率信息与模型面片信息相关联。

图 9 船体部分反射率信息
Figure 9. Reflectivity information of hull part
-
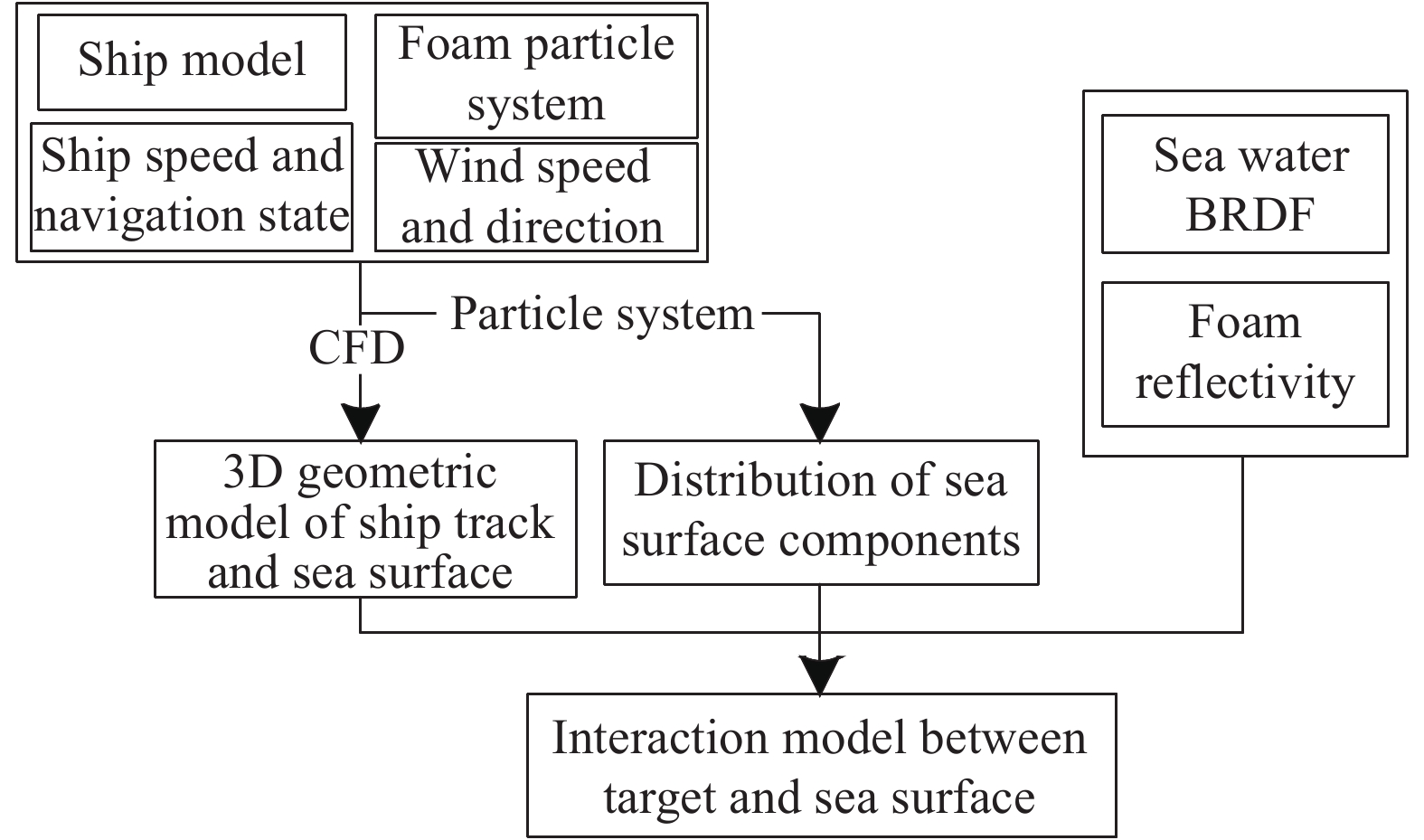
目标与海面背景的辐射耦合模型需要根据目标的几何结构及运行速度,使用CFD的方式获取目标与海面背景耦合的三维几何模型,通过泡沫粒子系统确定耦合海面的各部分组分分布,然后依据OCEABRDF模型计算的水体方向反射信息及泡沫反射信息作为非泡沫区及泡沫区的辐射信息,构建目标与海面交互的三维辐射特性模型。目标与海面背景耦合建模示意图如图 10所示。
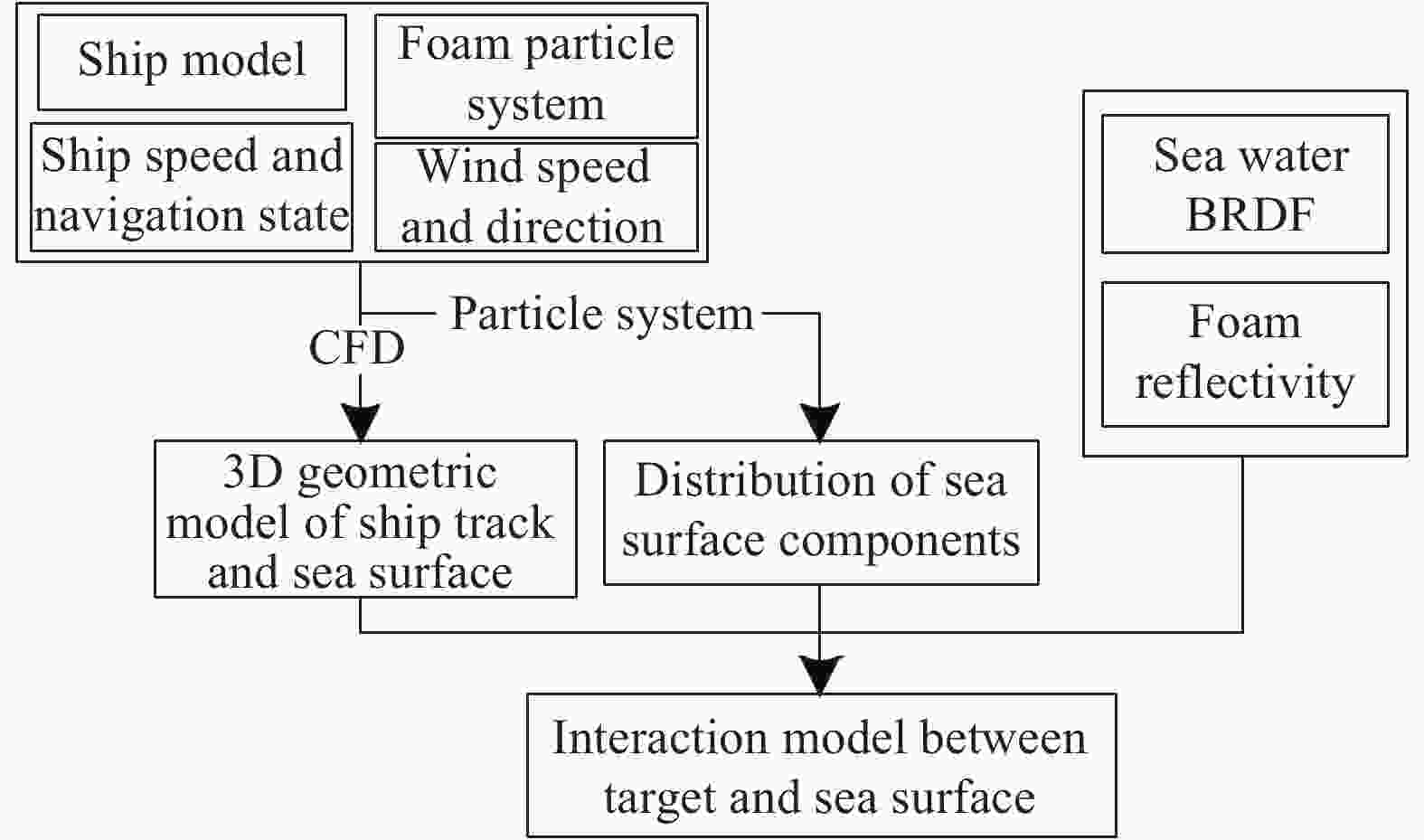
图 10 目标与海面背景耦合建模示意图
Figure 10. Sketch of coupling modeling between target and sea background
构建海面目标及背景交互的三维模型,需要先进行流体力学计算。在计算过程中使用的均为偏微分方程,因其求解问题的复杂性,难以直接对方程求解。在此需要对计算域进行离散化,将整个区域分成无数个子区域,每个子区域中心生成网格,将所求方程在每个网格上进行离散,得到相应的代数方程,进而求解。船体结构以设计的船速和航向与水体网格碰撞,网格内每个顶点会在不同的的受力情况下进行相应运动,从而产生整个网格面片位置的对应移动,在任意时间网格的顶点及面片分布即构成了该时刻海面的三维结构。计算过程中添加粒子系统模拟流体碰撞产生的泡沫分布,以海面碰撞后的网格位置为依据,在海面网格高度高于1 m时,在该面片区域内产生泡沫粒子,根据参考文献[15]的描述,设置泡沫粒子的半衰期为0.5 s。经过一段时间的运动获取航行流场的粒子分布。
利用CFD对船舶航迹流场进行计算,首先需将连续的流体计算域进行离散化,利用离散化得到的近似解来代替空间域的连续流场;然后将计算所得的离散点上的各变量按规则组合,建立变量之间相互关系的方程组;最后通过迭代方式求解方程得到流场中变量的近似值[16-18]。
在获取目标与背景耦合流场的三维结构及粒子系统计算的泡沫分布后,分别将海水的方向特性及泡沫的反射特性以纹理映射的方式与耦合流场三维结构相关联。其中,泡沫的反射率信息使用2.1节的白帽反射率信息替代,因其物理本质都是因水体的空化现象而产生,所以认为其辐射特性一致。结合2.1节背景三维辐射模型和2.2节目标三维辐射模型,最终得到的场景三维辐射模型示意图如图 11所示。

图 11 场景三维辐射模型示意图
Figure 11. Schematic diagram of scene 3D radiation model
-
在构建了上述辐射反射场以后,依据假定的观测天气条件,先利用辐射传输模型计算出场景的入射辐射,然后利用逆向光线追踪技术模拟辐射能量在场景内部的多次反射,如图 12所示。以入射的辐射能量为各光子基础能量,追踪计算成千上万的光子在场景内部的碰撞过程,在光子与几何面片碰撞时,先判断面片的材质类别,然后根据该材质的方向反射乘以入射的能量值作为光子反射的出射能量,再根据面片的法向信息判断光子的出射方向,完成一次反射计算。如此经过五次反射计算后统计各光子位置及其辐射能量分布,即零视距出射辐射图。

图 12 光线追踪模拟辐射能量在场景内部多次反射示意图
Figure 12. Schematic diagram of ray tracing simulation of multiple reflections of radiant energy inside the scene
计算得到该工程船只在转弯状态下1 km2海面场景、2 m空间分辨率的全色波段零视距出射辐射场分布,如图 13所示。
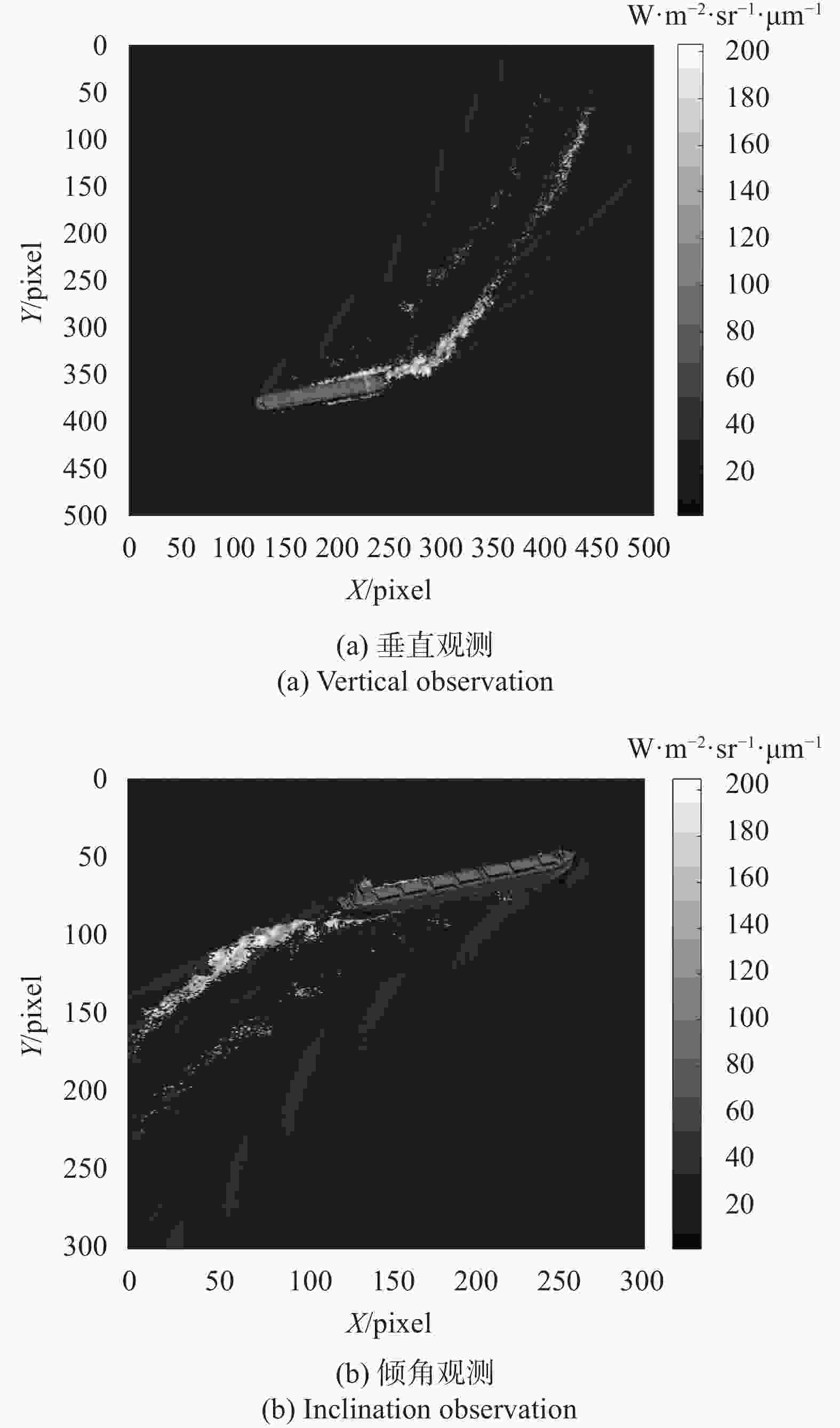
图 13 船只转弯状态下仿真零视距辐射分布图
Figure 13. Simulation zero line of sight radiation distribution under turning state
-
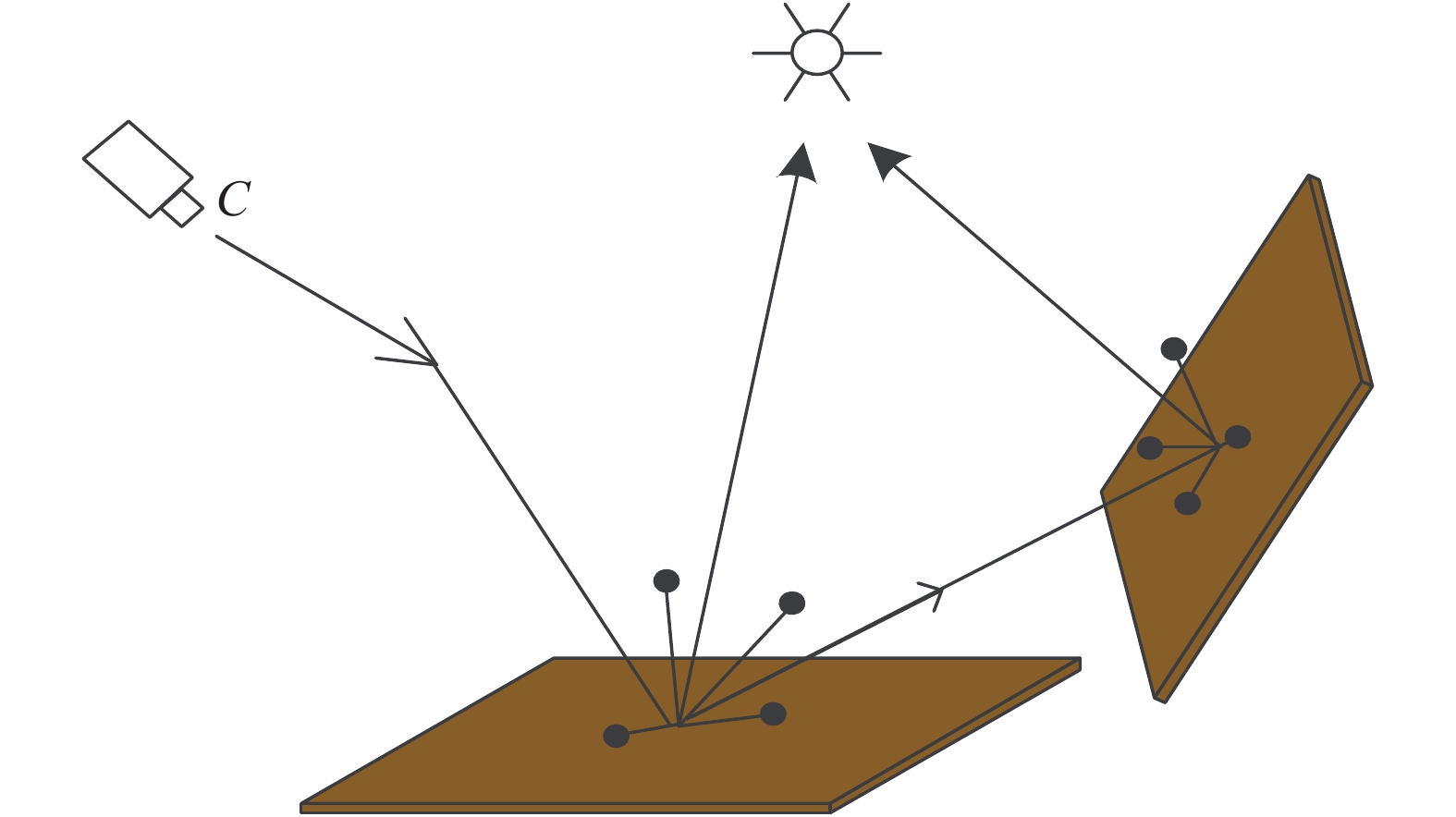
光学卫星传感器单个像元所能接收到的辐射能量可以表示为三部分辐射的总和,包括:(1)经过海表反射且未发生散射部分Lsu,表示目标本身反射被传感器接收的辐射量,这部分能量包含了地表的信息;(2)经海表反射后在大气中再次散射进入视场的部分Lsd,表示大气的邻近效应作用,会使相对较亮的目标变暗,相对较暗的目标变亮,造成图像的模糊效应;(3)未到达海表,经大气散射直接进入传感器部分Lsp,表示程辐射,会整体提高传感器接收到的总能量,并一定程度上降低图像的对比度。
传感器入瞳处接收到的所有辐射亮度可表示为:
$$ \begin{split} {L_0}\left( {x,y} \right) = &{L_{su}} + {L_{sd}} + {L_{sp}} = \rho (x,y,\lambda )\dfrac{{{\tau _v}(\lambda ){\tau _s}(\lambda )E_\lambda ^0}}{\pi }\cdot\\ &\cos [\theta (x,y)] + T(x,y)\rho (x,y,\lambda )\dfrac{{{\tau _v}(\lambda )E_\lambda ^d}}{\pi } + {L_{sp}} =\\ &\rho (x,y,\lambda )\dfrac{{{\tau _v}(\lambda )}}{\pi }\cdot \Bigg\{ {{\tau _s}(\lambda )E_\lambda ^0\cos [\theta (x,y)]} + \\ & {T(x,y)E_\lambda ^d} \Bigg\} + {L_{sp}} \end{split} $$ (3) 式中:ρ(x, y, λ)表示地面反射率;λ表示波长;τv表示大气上行透过率;τs表示大气下行透过率;E0表示太阳到达大气层顶的辐照度;θ表示太阳天顶角;T(x, y)表周边像元对中心像元的辐射贡献比重,可用三维海面辐射模型及蒙特卡洛模拟的周边像元邻近效应进行描述[19-20];Ed表示大气向下散射的辐照度。该部分各大气参数的数值在确定观测条件后,都可根据成熟的辐射传输模型MODTRAN (MODerate resolution atmospheric TRANsmission)计算得到。
利用逆向蒙特卡洛光线跟踪方法[14, 21],通过传感器随机地向观测场景发射成千上万条光线,跟踪它们与大气和场景的相互作用,并返回光线与场景碰撞点处的出射辐射亮度场,叠加上大气的衰减和程辐射作用后返回该点在入瞳处的辐射亮度[22-23]。模拟波长为550 nm,不同能见度下的大气点扩散函数如图 14所示。

图 14 模拟得到的不同能见度下的大气点扩散函数
Figure 14. Simulated atmospheric PSF under different visibility
-
(1)传感器光谱响应模拟
从传感器孔径前段探测到的大气层顶辐亮度信号转化为探测器输出的光电信号DN值这一过程可以表示为:
$$ DN=K\cdot {\displaystyle \int R(\lambda ){\tau }_{0}(\lambda ){L}_{0}(\lambda ){\rm{d}}\lambda }+D{N}_{{\rm{dark}}}$$ (4) 式中:R(λ)为传感器的光谱响应;K为辐射定标系数;L0(λ)为大气层顶的辐亮度信息;DNdark为传感器暗像元的光电响应值;τ0(λ)为传感器光学系统的透过率,为减少测量带来的误差,这部分会在传感器辐射定标时直接黑盒处理,体现在定标的信号增益系数中。根据中国资源卫星中心官网提供的数据,仿真的目标是高分六号卫星(GF-6)的全色多光谱相机(PMS)的全色波段(Pan)图像,其波段范围为450~900 nm,光谱响应函数如图 15所示。

图 15 GF6星PMS载荷全色波段光谱响应函数
Figure 15. Spectral response function of GF6 PMS in Pan band
(2)传感器空间响应模拟
在空间线性不变系统的假设下,可以采用空间频率域的MTF来描述传感器成像的空间响应。将传感器的响应看作是一个数学变换,经传感器光谱响应的图像表示为S{DN(x, y)},(x, y)为参考平面的空间几何坐标,则传感器响应后的图像表示为:
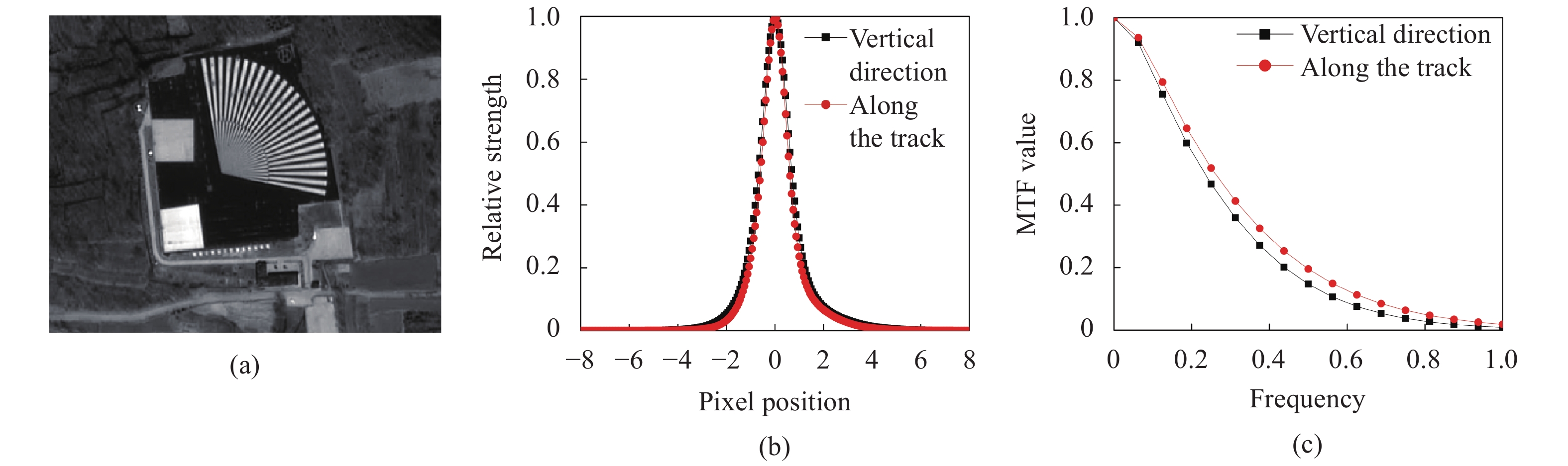
$$ D{N}^{’}(x,y)=DN(x,y)\ast F{T}^{{}_{\rm{-1}}}\left\{MT{F}_{SYS}\right\}$$ (6) 式中:FT-1表示反傅里叶变换。利用目标卫星嵩山靶场图像,在对图像进行大气校正以后,采用刃边法计算相机的MTF[24]。计算的GF-6卫星PMS相机全色波段点扩散函数及MTF曲线如图 16所示。

图 16 刃边计算卫星图(a)及计算出的相机点扩散函数(b)和MTF曲线(c)
Figure 16. Satellite edge map (a) and calculated camera point spread function (b) and MTF curve (c)
(3)噪声模拟
在上述信号的传输和转化过程中始终伴随着各种随机噪声的干扰,假设所有噪声都从传感器的输出端引入。对于CCD成像器件,占主导地位的随机噪声主要有背景光子散射噪声、暗电流散粒噪声、读出噪声和量化噪声。附加在输出信号上的全部随机噪声的总水平由它们各自统计分布的标准差决定。
$${\sigma _N} = \sqrt {\sum\limits_{i = 1}^n {\sigma _i^2} } $$ (7) 文中采用的是白噪声模型,由均值为0、以传感器空间响应模拟后的图像标准差σN为标准差的Gauss随机数发生器产生,并表示成数字图像。
$$D{N''} = D{N'} + {\sigma _N}$$ (8) 根据上述方法,仿真得到几种不同情况下的卫星入瞳处辐亮度图,如图 17所示。

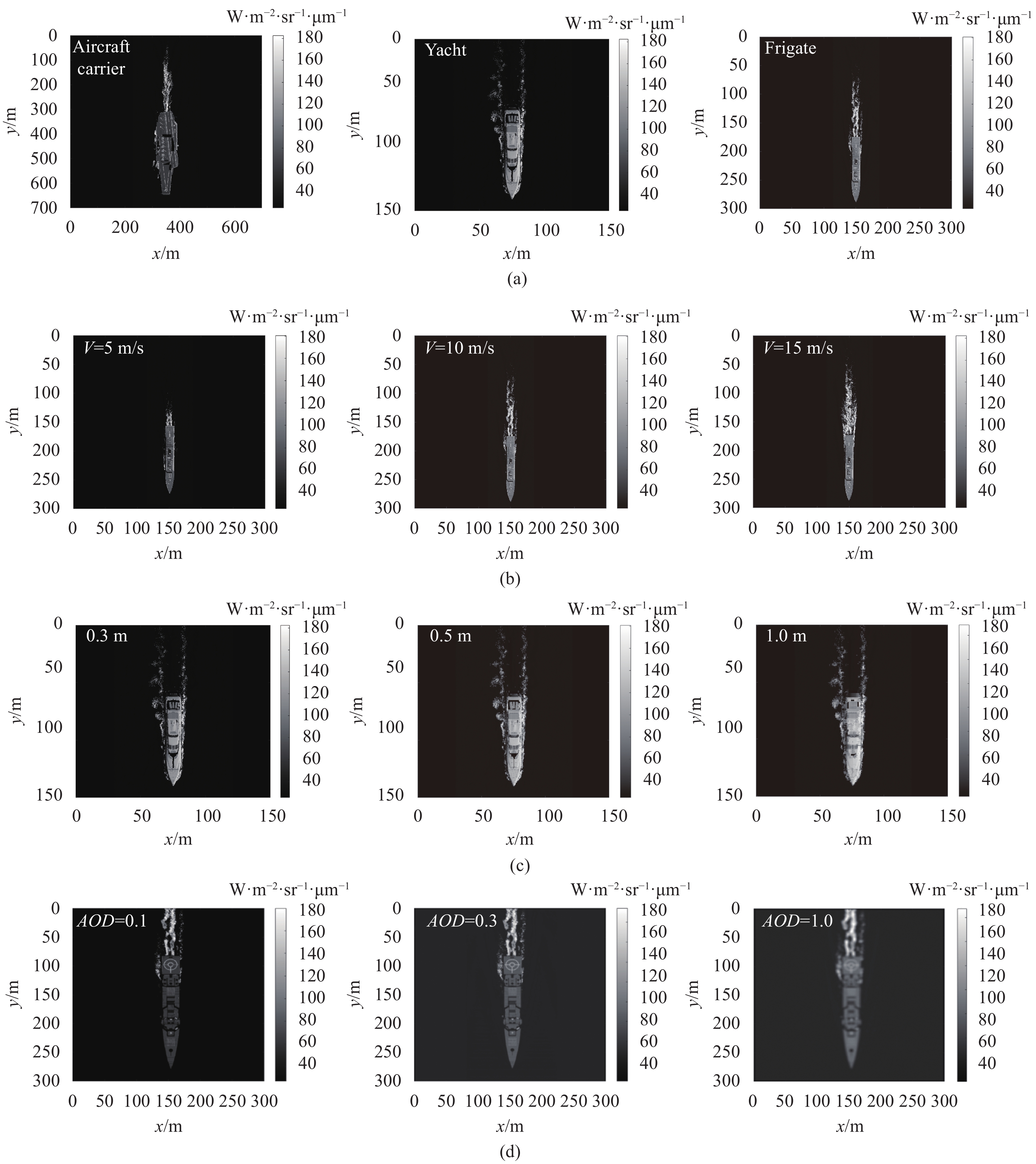
图 17 不同情况下的仿真结果。(a)不同船只目标;(b)同船只不同航行速度;(c)不同分辨率的观测结果;(c)不同大气条件观测结果
Figure 17. Simulation results under different conditions. (a) Different ship targets; (b) Different sailing speed of the same ship; (c) Observation results of different resolutions; (d) Observation results of different atmospheric conditions
图 17(a)为不同目标舰船的仿真结果,从左到右分别为航母、游艇以及护卫舰,不同的船只因其船体构造的不同,所形成的航行流场形态也有所不同。需要说明的是,文中所用的船只几何模型数据均来自于模型网站公开数据,所使用的反射率数据均为地物光谱库中相对应的材质反射率数据。图 17(b)仿真的是护卫舰在不同航行速度下的卫星观测结果,可以看出,随着航速的增加,航行所产生的流场也有所不同。速度越快,尾迹越长、分布范围也越宽,这是因为在泡沫的半衰期不变的情况下,航行速度越快,泡沫生存周期内船只航行的距离越远,表现出的泡沫尾迹越长。同质量的船只,速度越快,与海水碰撞时的动能越大,海水受力越大,产生的水面波动越大,泡沫分布的范围越广。利用这一特性,在舰船目标识别时,当确定船只类型尺寸后,可以利用尾迹泡沫的分布反推出船只在成像时刻的航行速度。图 17(c)仿真的是不同分辨率的卫星观测结果,如图所示,随着分辨率的降低,目标表面的纹理逐渐模糊,针对目标细节的识别能力逐渐降低。以图中游艇尾部的三个躺椅为例,在0.3 m分辨率下,三个躺椅清晰可辨,间隙明显。随着空间分辨率的降低,在0.5 m分辨率下,左侧的两个躺椅已经在同一像元内产生混合现象。在1 m分辨率下,三个躺椅则完全融合在数个像元内无法区分。可以有效地表征不同空间分辨率的卫星观测结果。图 17(d)仿真的是不同大气条件下的卫星观测结果,如图所示,随着气溶胶光学厚度的提高,舰船目标与海面背景的对比度逐渐降低,图像逐渐变得模糊,船体部分细节丢失,整体图像质量变低。由于光学厚度的增加,光线在大气中的散射和衰减效应更强,到达卫星观测处的上行程辐射值越高,邻近作用越强,造成图像中的高值区亮度降低,背景亮度提升。真实地再现了不同大气条件下卫星对目标成像的区别。
-
为了验证仿真结果的有效性,以GF-6卫星为例,模拟其PMS相机于2019年7月29日拍摄的台湾地区花莲港附近数据,仿真模拟在当时的大气及观测条件下,该工程船只航行中的GF-6卫星多光谱相机全色波段500×500像元大小的卫星影像。对不同波段的仿真方法过程一致,参数设置略有不同,因文中主要目标是高空间分辨率成像仿真,考虑篇幅原因,这里只对全色波段的结果进行比对验证。仿真参数如表 3所示。
表 3 仿真条件
Table 3. Simulation conditions
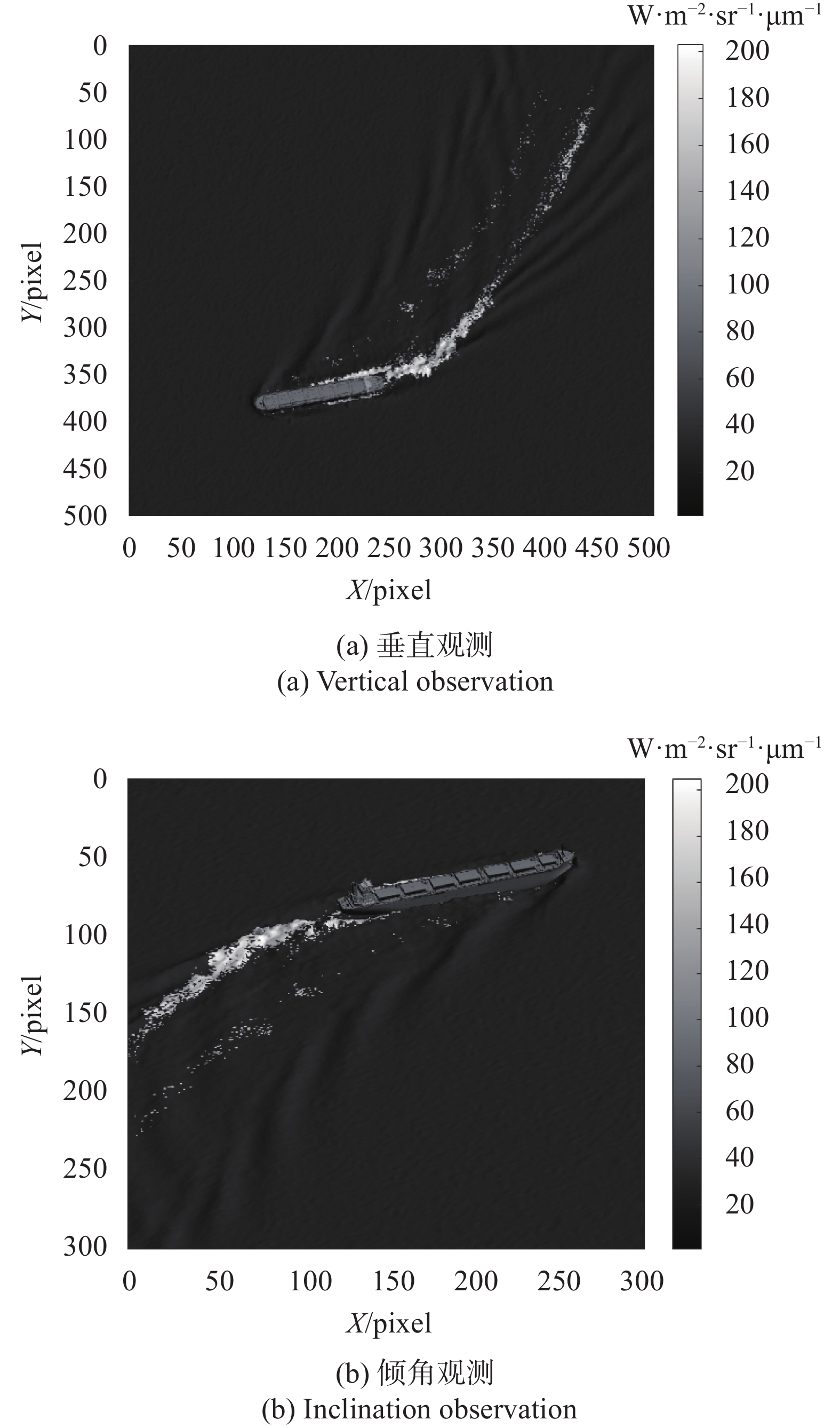
Simulation band Pan (450-900) GF-6 imaging time Beijing Time 10:47:40-10:47:53 Sun zenith angle/(°) 17.2 Sun azimuth/(°) 103.59 Observation azimuth/(°) 68.43 Observation zenith angle/(°) 11.93 Resolution/m 2 AOD@550 nm 0.061 Wind speed/m·s−1 1.78 Wind direction N Chlorophyll concentration /mg·m−3 0.1 Salt content/ppt 34.2 常规的远洋货轮的巡航速度为20节左右,即36.5 km/h。假设船只按此速度巡航,仿真计算出目标船只在海面以10 m/s航行时的GF-6 PMS载荷卫星影像与卫星实测图像对比,如图 18所示。

图 18 卫星实测结果与仿真结果
Figure 18. Satellite measurement results and simulation results
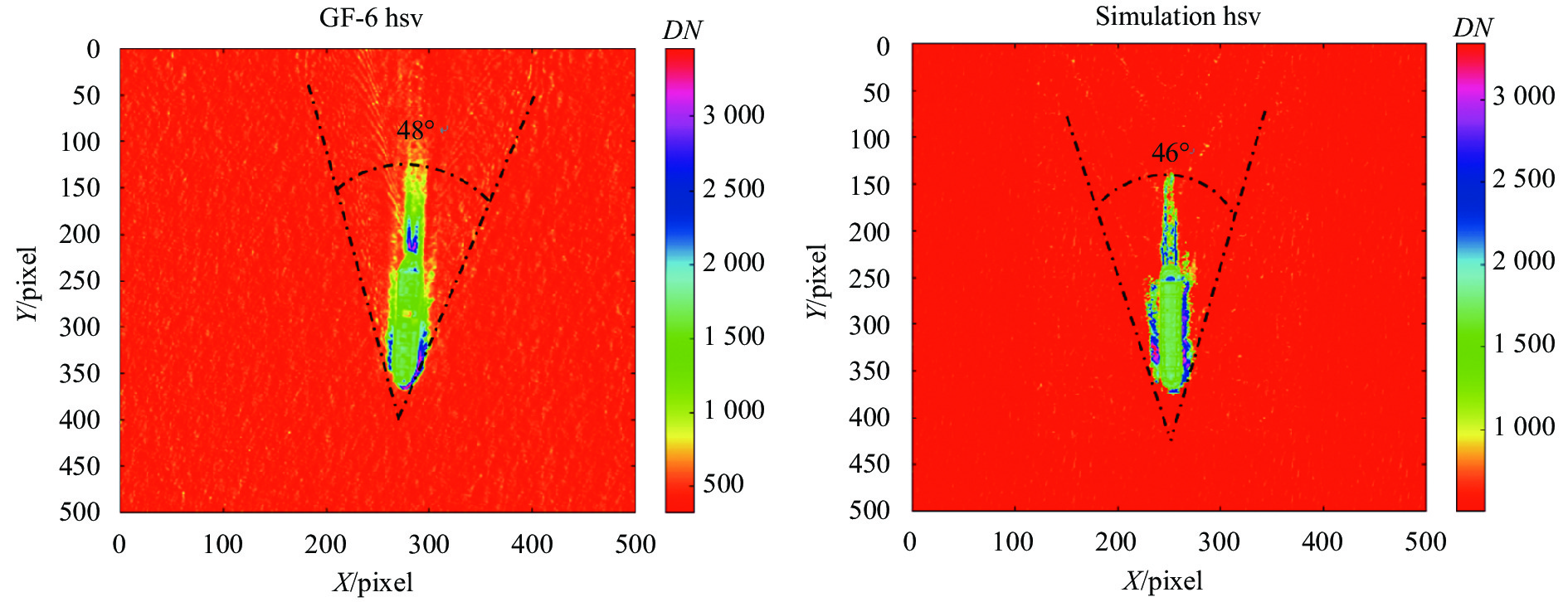
为凸显海面背景信息,选择使用伪彩色标尺突出显示图像信息(图 19),再结合二者的灰度分布直方图(图 20),对比仿真结果与卫星实测数据可以发现:仿真的船行波角度为46°,实测的船行波角度为48°,两者相似;两幅图像的高值区都分布在船头两侧及船尾部分,分布区域一致;船体部分DN值近似;因背景海面起伏引起的辐射调制作用相仿。但从船尾部位的尾迹亮度分布来看,仿真的图像与卫星图像还有一些不同,卫星图像的船尾泡沫高值区紧贴船只尾部,离船尾越远的地方亮度值越低,整体过程比较平缓,造成这种现象的原因主要是所选用的船体模型与卫星实拍的船体模型不完全一致,只是在船体尺寸及结构上相似,在船艇结构的局部细节可能存在差异,导致船体尾流差异;仿真结果总体分布趋势相似,也是离船尾越近的地方亮度值越高,但并不似实测结果一样平滑过渡,且高亮度值区域偏多;二者的灰度分布直方图结构相似,值域相近,仿真结果在高值区分布较实测结果更多一些,这与尾部泡沫高亮度区域偏多有关。

图 19 卫星实测结果与仿真结果伪彩色图
Figure 19. Pseudo color map of satellite measurement results and simulation results
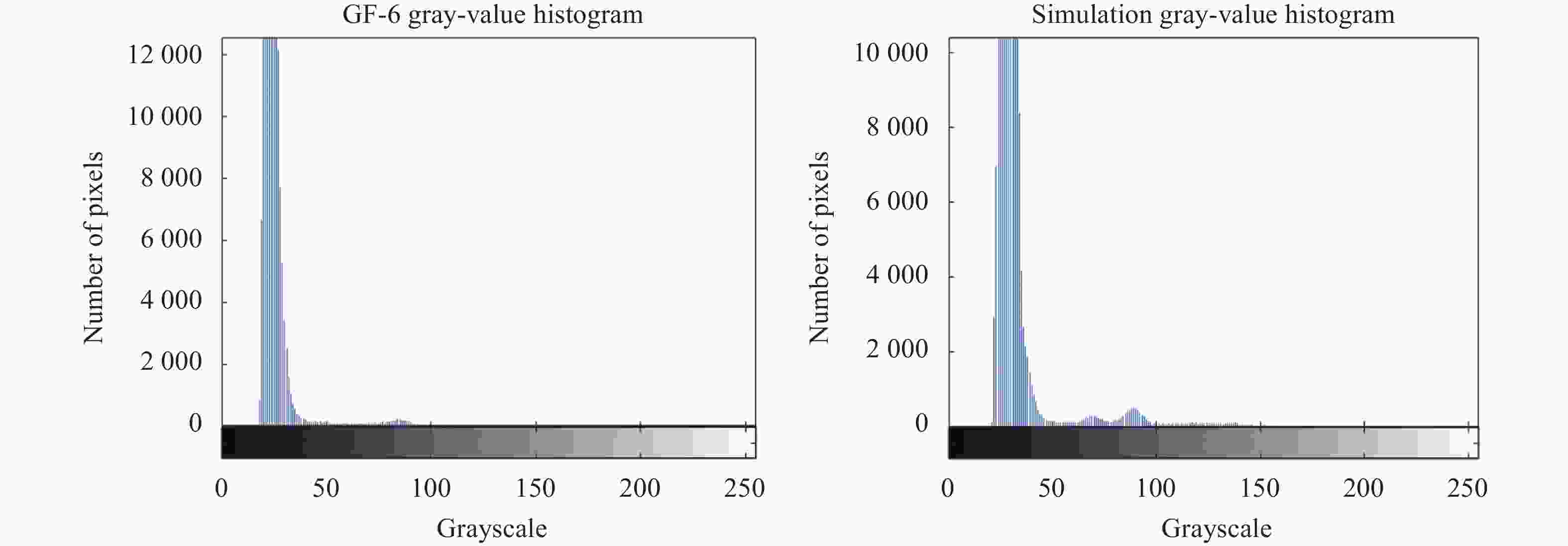
图 20 卫星实测结果与仿真结果灰度直方图对比
Figure 20. Comparison of gray histogram between satellite measured results and simulation results
对比图 18仿真结果与卫星实测结果,其最大及最小值、均值、标准差对比情况如表 4所示。表中,相对误差μ表示为:
$$ \mu =\frac{\left|{F}_{\text{模拟}}-{F}_{\text{实测}}\right|}{{F}_{\text{实测}}}$$ 其中最大值相对误差为4.14%,最小值相对误差为6.9%,均值相对误差为9.17%,标准差误差为9.21%。
为了说明图像中各个目标的仿真精度,选择了具有代表意义的四个位置,即图 18中标注的(1)~(4),分别就仿真结果与实测结果进行了对比:(1)海洋背景区域误差1.4%;(2)船只甲板区域误差3.4%;(3)船行波区域误差2%;(4)尾迹泡沫误差9.1%。总体误差小于9.2%,较真实地还原了船体在海面航行时的卫星成像情况。
表 4 仿真结果与实测结果对比
Table 4. Comparison of simulation results and measured results
Image type Total value Different regions Max Min Mean Standard deviation Sea surface (1) Ship deck (2) Wave (3) Wake (4) GF-6 (DN) 3463 417 469 193.38 498 1599 537 2025 Simulation (DN) 3319.8 446 512 211.19 505 1653 548 2210 Relative error 4.14% 6.9% 9.17% 9.21% 1.4% 3.4% 2% 9.1% -
文中通过CFD方法,构建船只在海面航行时船体与海水交互的三维场景,以此为基础提出海洋目标高分辨率遥感卫星成像仿真方法。通过建立海面三维辐射场、大气和传感器效应模拟,得到卫星遥感仿真图像。与卫星实测图像比较,仿真结果最大值误差4.14%,最小值误差6.9%,均值误差9.17%,标准差误差9.21%。在平均灰度值、灰度分布、纹理细节等方面都具有较好的一致性。该方法可以为评估在不同情况下舰船目标的检测和识别效果提供有力的数据支撑。
文中整体方法使用合理,各种影响因素考虑较为全面,但是过程中的有些参数没有实际测量,使仿真结果存在一定的误差。如:船体的反射率数据并没有实际测量,而是以相同颜色的钢材的反射率作为替代;大气的光学厚度数据是MODIS准同步过顶数据的反演结果,并不是卫星过顶时的实测数据。这些在后续研究工作中可以通过实测数据对模型做一定的修正,对误差源做进一步控制,得到更真实的仿真结果。
Simulation method of high resolution satellite imaging for sea surface target
-
摘要: 海洋目标高空间分辨率遥感成像仿真技术在海面目标探测识别等方面得到了广泛应用。舰船与海水流体交互作用在高分辨率下得以显现,对其产生的复杂流场辐射模拟是成像仿真的主要难点。重点研究了舰船航行过程中与海水交互产生的流场几何形态和物性变化,提出了与海面方向辐射特性的耦合作用模型及海洋目标高分辨率遥感成像仿真方法。通过频谱分析的方法构建海面三维模型,使用计算流体力学的方法构造了船只航行流场的三维几何模型。根据海面组分分布的不同将其辐射特性与三维结构关联,构建了亚米级海洋场景三维辐射模型。通过辐射传输计算、场景内部多次反射模拟及大气影响和传感器效应仿真,最终得到观测条件下的卫星遥感图像。结果表明,将GF-6卫星全色波段实测图像与相同成像条件下的仿真图像对比,图像均值的误差为9.17%,标准差误差为9.21%,在平均灰度值、灰度分布、纹理细节等方面都具有较好的一致性,可以较真实地模拟高分辨率卫星成像下的海洋目标场景。Abstract: High resolution remote sensing imaging simulation technology for sea surface target has been widely used in sea surface target detection and recognition. The interaction between ship and seawater can be seen in high resolution, and the radiation simulation of complex flow field is the main difficulty of imaging simulation. The geometry and physical properties of the flow field generated by the interaction between the ship and the sea during navigation were studied, and the coupling model with the radiation characteristics of the sea surface was proposed. The three-dimensional model of sea surface was constructed by the method of spectrum analysis, and the three-dimensional model of ship navigation flow field was constructed by the method of computational fluid dynamics. According to the different distribution of sea surface components, the radiation characteristics were associated with the three-dimensional structure, and the three-dimensional radiation model of sub meter ocean scene was constructed. Through radiative transfer calculation, multiple reflection simulation in the scene, atmospheric influence and sensor effect simulation, the satellite remote sensing image under the observation condition was finally obtained. The results show that the mean error and standard deviation error of GF-6 satellite images are 9.17% and 9.21% respectively, which are compared with the simulated images under the same imaging conditions. The average gray value, gray distribution and texture details of the images are consistent, which can simulate the ocean target scene under high resolution satellite imaging.
-
图 5 OCEABRDF模型计算的海水无泡沫覆盖区域的方向反射率
Figure 5. Directional reflectance of seawater without foam covering area calculated by OCEABRDF model
图 10 目标与海面背景耦合建模示意图
Figure 10. Sketch of coupling modeling between target and sea background
图 12 光线追踪模拟辐射能量在场景内部多次反射示意图
Figure 12. Schematic diagram of ray tracing simulation of multiple reflections of radiant energy inside the scene
图 13 船只转弯状态下仿真零视距辐射分布图
Figure 13. Simulation zero line of sight radiation distribution under turning state
图 14 模拟得到的不同能见度下的大气点扩散函数
Figure 14. Simulated atmospheric PSF under different visibility
图 16 刃边计算卫星图(a)及计算出的相机点扩散函数(b)和MTF曲线(c)
Figure 16. Satellite edge map (a) and calculated camera point spread function (b) and MTF curve (c)
图 17 不同情况下的仿真结果。(a)不同船只目标;(b)同船只不同航行速度;(c)不同分辨率的观测结果;(c)不同大气条件观测结果
Figure 17. Simulation results under different conditions. (a) Different ship targets; (b) Different sailing speed of the same ship; (c) Observation results of different resolutions; (d) Observation results of different atmospheric conditions
图 19 卫星实测结果与仿真结果伪彩色图
Figure 19. Pseudo color map of satellite measurement results and simulation results
图 20 卫星实测结果与仿真结果灰度直方图对比
Figure 20. Comparison of gray histogram between satellite measured results and simulation results
表 1 OCEABRDF输入参数表
Table 1. OCEABRDF input parameter table
Parameter Value Wind speed/m·s−1 1.78 Wind direction N Salt content/ppt 34.2 Chlorophyll concentration/mg·m−3 0.1 Sun zenith 17.18 Sun azimuth 103.6  下载: 导出CSV
下载: 导出CSV
表 2 货船模型信息
Table 2. Cargo ship model information
Overall length/m Molded breadth/m Depth moulded/m Full load draft/m Number of patches Number of vertices 274 46 24.2 17.1 949732 532336
下载: 导出CSV
表 3 仿真条件
Table 3. Simulation conditions
Simulation band Pan (450-900) GF-6 imaging time Beijing Time 10:47:40-10:47:53 Sun zenith angle/(°) 17.2 Sun azimuth/(°) 103.59 Observation azimuth/(°) 68.43 Observation zenith angle/(°) 11.93 Resolution/m 2 AOD@550 nm 0.061 Wind speed/m·s−1 1.78 Wind direction N Chlorophyll concentration /mg·m−3 0.1 Salt content/ppt 34.2
下载: 导出CSV
表 4 仿真结果与实测结果对比
Table 4. Comparison of simulation results and measured results
Image type Total value Different regions Max Min Mean Standard deviation Sea surface (1) Ship deck (2) Wave (3) Wake (4) GF-6 (DN) 3463 417 469 193.38 498 1599 537 2025 Simulation (DN) 3319.8 446 512 211.19 505 1653 548 2210 Relative error 4.14% 6.9% 9.17% 9.21% 1.4% 3.4% 2% 9.1%
下载: 导出CSV
-
[1] Yao Y, Jiang Z, Zhang H. High-resolution optical satellite image simulation of ship target in large sea scene [C]//IEEE International Geoscience and Remote Sensing Symposium (IGARSS), 2016: 1241-1244. [2] Zhang Z R, Zhang F, Li B Q. Numerical calculation of viscous free surface flow about ship hull [J]. Journal of Ship Mechanics, 2002, 6(6): 11-18. (in Chinese) [3] Wang Z Z, Xiao D, Xiong Y, et al. Numerical calculation of viscous resistance in three different stern appendage cases [J]. Journal of Naval University of Engineering, 2010, 22(1): 45-49. (in Chinese) [4] Huang D B, Zhang Y X, Zheng R, et al. Numerical simulation of viscous flow around high speed monohull and trimaran ships [J]. Journal of Harbin Engineering University, 2010, 6(31): 683-688. (in Chinese) [5] Chang H X, Liu Y Z, Miao G P. Numerical dimulation of three-dimensional viscous flow with free surface about a ship[J]. Journal of Ship Mechanics, 2003, 7(3): 33-38. [6] Zhang X D, Lewis M R, Lee M, et al. The volume scattering function of natural bubble populations [J]. Limnol Oceanogr, 2002, 47(5): 1273-1282. doi: 10.4319/lo.2002.47.5.1273 [7] Zhang X D, Lewis M R. Optical influence of ship wakes [J]. Applied Optics, 2004, 43(15): 3122-3132. doi: 10.1364/AO.43.003122 [8] Zhang J S, Liu J K, Ji B J, et al. Optical speciality of real wakes [J]. Acta Photonica Sinica, 2002, 31(10): 1284-1288. (in Chinese) [9] Wang J A, Zong S G, Ma Z G. Study on polarization compressing of laser detecting of ship air bubbles [J]. Laser & Infrared, 2003, 33(3): 172-175. (in Chinese) [10] Ji Y J, Ma X, He J H, et al. The influence of bubble on the transmitting of light in wake [J]. Acta Photonica Sinica, 2004, 33(5): 626-628. (in Chinese) [11] Wang S L. Research of large-scale ocean waves 3D visualization[D]. Xi'an: Northwestern Polytechnical University, 2017. (in Chinese) [12] Monahan E C, O’Muircheartaigh I G. Optimal power-law description of oceanic whitecap coverage dependence on wind speed. [J]. Journal of Physical Oceanography, 1980, 10(12): 2094-2099. doi: 10.1175/1520-0485(1980)010<2094:OPLDOO>2.0.CO;2 [13] Koepke P. Effective reflectance of oceanic whitecaps [J]. Applied Optics, 1984, 23(11): 1816-1824. doi: 10.1364/AO.23.001816 [14] Li H S, Liu W. Analysis of the adjacency effect in satellite remote sensing by using backward Monte Carlo method [J]. J Huazhong Univ of Sci & Tech (Nature Science Edition), 2004, 32(11): 1-3. (in Chinese) [15] Gao K X, Jin L A, Yuan Z J, et al. Research on bubble number density attenuation model of ship’s bubble wake field [J]. China Measurement & Test, 2019, 45(8): 61-66. (in Chinese) [16] Zhao S Q. The application of CFD technology in the numerical simulation of wind load of Chongqing grand theater[D]. Chongqing: Chongqing University, 2007. (in Chinese) [17] Wang W. The numerical calculation of flow field around large naval vessel[D]. Harbin: Harbin Engineering University, 2011. (in Chinese) [18] Yang D C. Research and simulation on wave load characteristics of ship based on CFD theory[D]. Dalian: Dalian Maritime University, 2017. (in Chinese) [19] Yakhot V, Orzag S A. Renormalization group analysis of turbulence: Basic theory [J]. Scient Comput, 1986, 1: 3-11. doi: 10.1007/BF01061452 [20] Wang H, Xu J, Zhang Y X. Simulate research of trajectory with monte-carlo method based on matlab [J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2005, 25(1): 181-183. (in Chinese) [21] Pharr M, Jakob W, Humphreys G. Physically Based Rendering: From Theroy to Implementation[M]. 3rd ed. Burlington: Morgan Kaufmann, 2016. [22] Ma X S, Guo X Y, Meng X, et al. Simulation and analysis of the adjecency effect in earch-imaging process of the optical remote sensing [J]. Journal of Infrared and Millimeter Waves, 2015, 34(2): 250-256. (in Chinese) [23] Ma X S, Yang Z, Li L G. Scene simulation based on optical field theory [J]. Infrared and Laser Engineering, 2018, 47(8): 0818003. (in Chinese) doi: 10.3788/IRLA201847.0818003 [24] Wang X H, Qiao Y L, Yi W N. In-fligth measurement of satellite optical camera MTF [J]. Journal of Remote Sensing, 2007, 11(3): 322. (in Chinese) -

 点击查看大图
点击查看大图
计量
- 文章访问数: 228
- HTML全文浏览量: 81
- PDF下载量: 44
- 被引次数: 0













