















-
大口径透镜作为重要的光学元件,广泛应用于大视场巡天望远镜中,如大口径巡天望远镜(LSST)[1]中的校正镜组利用三块米级大口径透镜组成同轴三反形式光学系统,有效校正球差、慧差、像散等偏差,保证光学成像质量[2]。透镜支撑结构用于减小或消除可能造成镜面变形的局部应力,在保证透镜面形精度中起着重要作用。透镜支撑结构多采用位于透镜侧面的被动支撑结构[3],主要分为压圈隔圈、弹性体支撑[4]及柔性支撑结构三种方式,如:斯隆数字巡天望远镜[5](SDSS)相机采用Kapton隔圈与O型圈相结合的方式将透镜压入固定有六块弹性支撑块的镜室中;多镜面望远镜[6](MMT)校正镜组利用离散弹性体垫片将透镜固定在镜筒上,即24个方形RTV垫片的径向主支撑和24个轴向RTV垫片相结合。
柔性结构因具有很高的重复精度、低摩擦性、容易加工制造及成本相对较低等优点被广泛应用[7]。柔性支撑结构将透镜从其支撑系统的机械和热效应中隔离开,能够更好地保证透镜的面形精度[8-9]。柔性支撑结构在某些自由度上有一定的柔度,允许该方向上具有少量可控的相对位移,补偿透镜与其支撑系统间因材料热膨胀系数不同引起的变形[10-11],在其他方向上具有较高的刚度,保证透镜的位置精度,即透镜在不同位姿下能够保持其光轴位置不变[12]。
透镜柔性支撑结构模型非常复杂。赵磊等[13]针对160 mm口径的透镜提出了一种具有整体径向挠性的多点均匀支撑结构,利用各支撑块在受力情况下的轴向柔度使透镜的重力均匀地作用于各支撑块上。张刘等[14]针对三点六狭缝柔性支撑结构形式,利用柔性镜座释放透镜重力及透镜与柔性镜座因材料热膨胀系数不同引起的径向应力。Karim等[15]在Binospec光谱仪中选用切向杆透镜支撑方式,由12个装有圆形凸台的切向支撑臂组成,镜座使用一个矩形截面的切线柔性结构,可最小化镜座直径。
基于上述研究,提出了一种用于大口径透镜的混合柔性支撑结构,以640 mm口径的透镜为对象,以自重及−10 ℃~40 ℃工况下面形误差优于λ/20 (λ=632.8 nm)为目标进行研究。首先对柔性支撑组件各部分的柔性铰链进行分析,建立柔性支撑组件理论模型,以柔性支撑组件的总变形能为目标,以位置精度及空间限制为约束,对柔性支撑组件进行优化设计,最后利用球面数据拟合分析该柔性支撑组件在自重、温度变化等工况下的面形精度。
-
如图1所示,文中所讨论的为一凹凸形式透镜,材料为H-K9L,材料属性如表1所示。该透镜重心显著偏离边缘,是一种相对较差的透镜结构形式,以此为对象进行研究具有一定代表性。

图 1 透镜形状及尺寸参数
Figure 1. Lens shape and dimension parameters
表 1 材料属性
Table 1. Material properties
Materials H-K9L 4J32 TC4 Density ρ/kg·m−3 2520 8300 4400 Elastic modulus E/GPa 79.2 150 114 Poisson’s ratio μ 0.21 0.30 0.34 Thermal expansion coefficient α/10-6·K−1 7.60 7.50 9.10 针对图1所示大口径透镜,为便于装调及降低加工制造难度,采用将柔性支撑组件与镜座结构分离的设计,同时可减少机械和热效应对透镜的影响,透镜组件整体结构如图2所示。一般情况下,透镜侧面的支撑点越多,镜面的面形精度越好,但支撑点增多会造成点与点之间过于密集,加工及装调难度加大。因此,考虑实际工程需求,采用12点均匀分布支撑形式。

图 2 透镜组件整体结构示意图
Figure 2. Schematic diagram of the overall structure of lens assembly
如图2所示,透镜组件包括透镜、柔性支撑组件以及镜座。柔性支撑组件如图3所示,其由柔性垫片、径向柔性支撑结构及柔性支撑座组成。柔性垫片粘接于透镜边缘,并与其他两部分通过螺钉连接,柔性支撑座在通过螺钉与镜座连接。为了减小透镜与柔性支撑垫之间的线膨胀系数的差异,减少热应力,柔性垫片选用材料为铟钢(4J32),其余结构选用具有高强度的钛合金(TC4)材料加工制造。材料属性参数如表1所示。
图 3 柔性支撑组件及其各部分结构件
Figure 3. Lens support assembly and its structural parts
柔性支撑组件采用混合柔性铰链结构,充分利用各柔性结构的优点,便于装调,同时可在狭小空间内保证柔性支撑组件满足整体尺寸要求。根据铰链切口处轮廓曲线形状不同,柔性铰链可分为圆弧形、椭圆形、抛物线形、双曲线形等形式[16]。如图3所示,柔性垫片与柔性支撑座中属于圆弧型柔性铰链结构,其中柔性支撑座属于右圆弧型,通过使用圆弧型柔性铰链结构,利用铰链的转动特性,可有效减小刚体位移。径向柔性支撑结构属于弹性片型柔性铰链,通过弹性片变形可以补偿透镜材料热膨胀引起的变形。
-
对圆弧型与右圆弧型柔性铰链结构进行性能计算时,假设[17]:(1)柔性铰链形变只发生在半圆部分;(2)由于铰链实际所产生的形变较小,可忽略铰链各部分之间形变的耦合影响;(3)在分析小变形悬臂梁时,弯矩和力对铰链产生形变,忽略剪切和扭转带来的影响。圆弧型与右圆弧型柔性铰链结构示意图如图4所示。
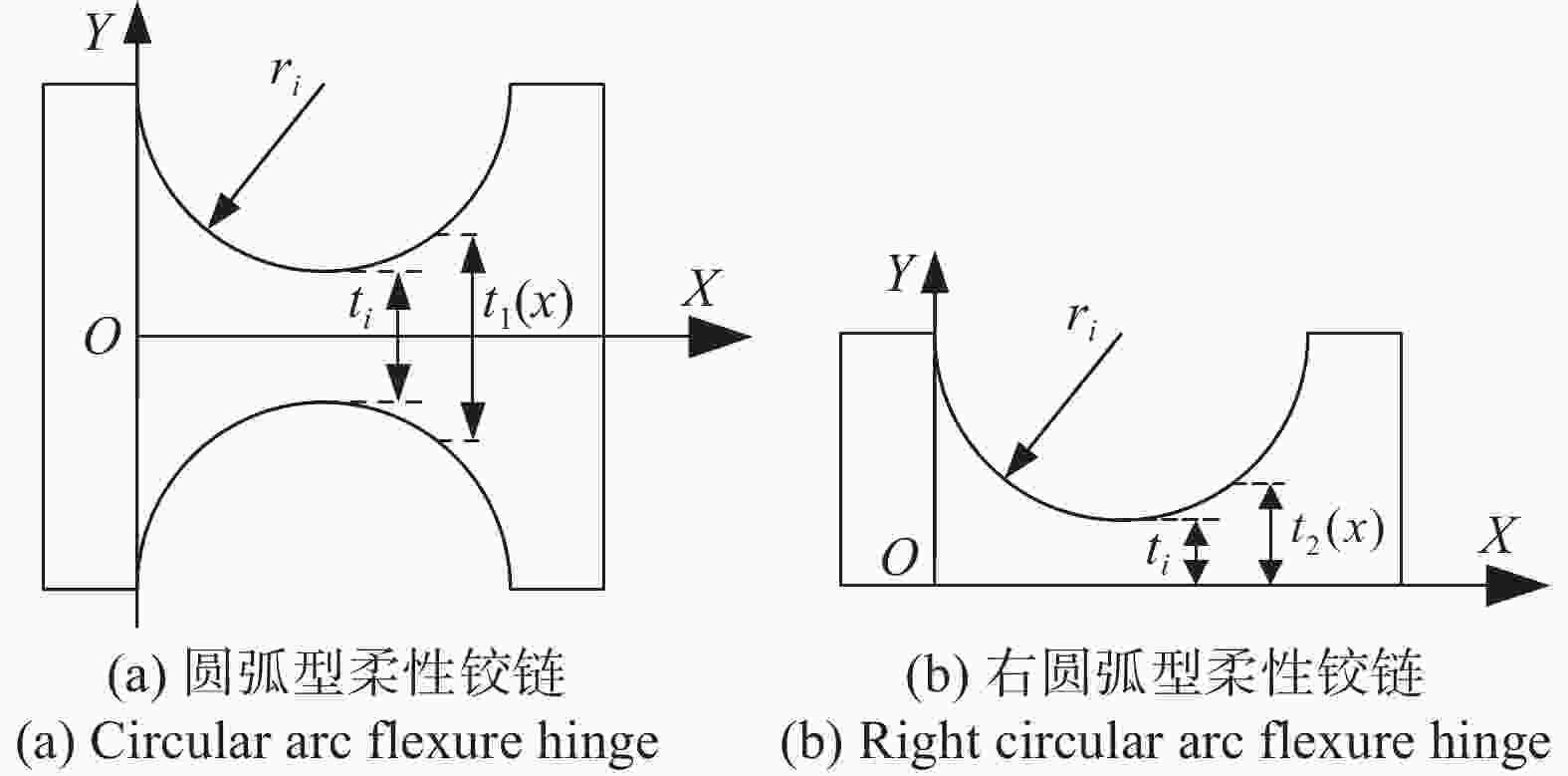
图 4 柔性铰链结构示意图
Figure 4. Schematic diagram of flexible hinge structure
因此,圆弧形柔性铰链结构的可变厚度为:
$$ {t_1}(x) = {t_1} + 2{r_1} - 2\sqrt {x(2{r_1} - x)} {\text{ }},{\text{ }}0 < x < 2{r_1} $$ (1) 右圆弧型柔性铰链结构的可变厚度为:
$$ {t_2}(x) = \frac{{{t_2}}}{2} + {r_2} - \sqrt {x(2{r_2} - x)} {\text{ }},{\text{ }}0 < x < 2{r_2} $$ (2) 其中,圆弧半径为
${r_i}$ ,铰链最小厚度为${t_i}$ ,铰链宽度为${b_i}$ 。对圆弧型柔性铰链结构进行受力分析,假定铰链固定端为A点,自由端B施加转动力矩
${M_e} = 0$ 及力${F_{{x_i}}}$ 、${F_{{y_i}}}$ 。以铰链固定端为原点,建立如图5所示的坐标系。
图 5 柔性铰链受力分析示意图
Figure 5. Schematic diagram of force analysis of flexure hinge
对于圆弧型柔性铰链,根据材料力学原理,柔性铰链自由端处的变形与载荷的关系可表示为:
$$ \begin{split} \left[ {\begin{array}{*{20}{c}} {{u_{{x_1}}}} \\ {{u_{{y_1}}}} \\ {{\theta _{{z_1}}}} \end{array}} \right] = &[{{\boldsymbol{C}}_1}]\left[ {\begin{array}{*{20}{c}} {{F_{{x_1}}}} \\ {{F_{{y_1}}}} \\ {{M_{{z_1}}}} \end{array}} \right] =\\ & \left[ {\begin{array}{*{20}{c}} {{C_{1,x - {F_x}}}}&0&0 \\ 0&{{C_{1,y - {F_y}}}}&{{C_{1,y - {M_z}}}} \\ 0&{{C_{1,{\theta _z} - {F_y}}}}&{{C_{1,{\theta _z} - {M_z}}}} \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {{F_{{x_1}}}} \\ {{F_{{y_1}}}} \\ {{M_{{z_1}}}} \end{array}} \right] \end{split}$$ (3) 式中:
${u_{{x_1}}}$ 、${u_{{y_1}}}$ 分别为铰链自由端处沿X、Y轴的位移;$ {\theta _{{z_1}}} $ 为自由端处绕Z轴的转角;${{{{\boldsymbol{C}}}}_1}$ 为柔性支撑垫片的圆弧型柔性铰链的柔度矩阵。同时,根据刚度互等定理可知$ {C_{1,{\theta _z} - {F_y}}} = {C_{1,y - {M_z}}} $ 。根据卡氏第二定理可知:
$$ {u}_{x}=\frac{\partial U}{\partial {F}_{x}}\text{,}{u}_{y}=\frac{\partial U}{\partial {F}_{y}}\text{,}{\theta }_{z}=\frac{\partial U}{\partial {M}_{z}} $$ (4) $$ U = \frac{1}{2}\int\nolimits_0^l {\left(\frac{{{F_x}^2}}{{EA(x)}} + \frac{{{M_z}^2}}{{EI(x)}}\right)}{\rm{d}}x $$ (5) 式中:
$E$ 为材料的杨氏模量;$A(x)$ 为铰链的横截面积,在圆弧型柔性铰链中${A_1}(x) = {b_1}{t_1}(x)$ ;$I(x)$ 为转动惯量,在圆弧型柔性铰链中${I_1}(x) = {b_1}{[{t_1}(x)]^3}/12$ 。由于在圆弧型柔性铰链中${F_x} = {F_{{x_1}}}$ ,${M_z} = {M_e} + (2{r_1} - {x_1}) {F_{{y_1}}}$ ,故圆弧型柔性铰链的形变为:$$ \left\{ {\begin{array}{*{20}{l}} {{u_{{x_1}}} = \dfrac{{\partial U}}{{\partial {F_x}}} = \dfrac{{{F_{{x_1}}}}}{{{E_1}{b_1}}}\displaystyle \int\nolimits_0^{2{r_1}} {\dfrac{1}{{{t_1}(x)}}} {\rm{d}}x}\\ {{{u_{{y_1}}} = \dfrac{{\partial U}}{{\partial {F_y}}} = \dfrac{{12}}{{{E_1}{b_1}}}\left[{F_{{y_1}}}\displaystyle \int\nolimits_0^{2{r_1}} {\dfrac{{{{(2{r_1} - {x_1})}^2}}}{{{t_1}^3(x)}}} {\rm{d}}x - {M_e}\displaystyle \int\nolimits_0^{2{r_1}} {\dfrac{{2{r_1} - {x_1}}}{{{t_1}^3(x)}}} {\rm{d}}x\right]}} \\ {{\theta _{{z_1}}} = \dfrac{{\partial U}}{{\partial {M_z}}} = \dfrac{{12}}{{{E_1}{b_1}}}\left[{M_e}\displaystyle \int\nolimits_0^{2{r_1}} {\dfrac{1}{{{t_1}^3(x)}}} {\rm{d}}x - {F_{{y_1}}}\displaystyle \int\nolimits_0^{2{r_1}} {\dfrac{{2{r_1} - {x_1}}}{{{t_1}^3(x)}}} {\rm{d}}x\right]{\text{ }}} \end{array}} \right. $$ (6) 联立公式(1)、(3)~(6),可推得圆弧型柔性铰链的各方向柔度为:
$$ \left\{ \begin{gathered} {C_{1,x - {F_x}}} = \frac{1}{{{E_1}{b_1}}}\int\nolimits_0^{2{r_1}_{}} {\frac{1}{{{t_1} + 2{r_1} - 2\sqrt {x(2{r_1} - x)} }}} {\rm{d}}x \\ {C_{1,y - {F_y}}} = \frac{{12}}{{{E_1}{b_1}}}\int\nolimits_0^{2{r_1}} {\frac{{{{(2{r_1} - x)}^2}}}{{{{[{t_1} + 2{r_1} - 2\sqrt {x(2{r_1} - x)} ]}^3}}}} {\rm{d}}x \\ {C_{1,y - {M_z}}} = {C_{1,{\theta _z} - {F_y}}} = \frac{{12}}{{{E_1}{b_1}}}\int\nolimits_0^{2{r_1}} {\frac{{2{r_1} - x}}{{{{[{t_1} + 2{r_1} - 2\sqrt {x(2{r_1} - x)} ]}^3}}}} {\rm{d}}x \\ {C_{1,{\theta _z} - {M_z}}} = \frac{{12}}{{{E_1}{b_1}}}\int\nolimits_0^{2{r_1}} {\frac{1}{{{{[{t_1} + 2{r_1} - 2\sqrt {x(2{r_1} - x)} ]}^3}}}} {\rm{d}}x \end{gathered} \right. $$ (7) 同理,右圆弧型柔性铰链结构自由端处的变形与载荷的关系为:
$$ \begin{split} \left[ {\begin{array}{*{20}{c}} {{u_{{x_2}}}} \\ {{u_{{y_2}}}} \\ {{\theta _{{z_2}}}} \end{array}} \right] =& [{{\boldsymbol{C}}_2}]\left[ {\begin{array}{*{20}{c}} {{F_{{x_2}}}} \\ {{F_{{y_2}}}} \\ {{M_{{z_2}}}} \end{array}} \right] =\\ &\left[ {\begin{array}{*{20}{c}} {{C_{2,x - {F_x}}}}&0&0 \\ 0&{{C_{2,y - {F_y}}}}&{{C_{2,y - {M_z}}}} \\ 0&{{C_{2,{\theta _z} - {F_y}}}}&{{C_{2,{\theta _z} - {M_z}}}} \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {{F_{{x_2}}}} \\ {{F_{{y_2}}}} \\ {{M_{{z_2}}}} \end{array}} \right] \end{split}$$ (8) 式中:
$$ \left\{ \begin{gathered} {C_{2,x - {F_x}}} = \frac{1}{{{E_2}{b_2}}}\int\nolimits_0^{2{r_2}} {\frac{1}{{{t_2} + {r_2} - \sqrt {x(2{r_2} - x)} }}} {\rm{d}}x \\ {C_{2,y - {F_y}}} = \frac{{12}}{{{E_2}{b_2}}}\int\nolimits_0^{2{r_2}} {\frac{{{{(2{r_2} - x)}^2}}}{{{{[{t_2} + {r_2} - \sqrt {x(2{r_2} - x)} ]}^3}}}} {\rm{d}}x \\ {C_{2,y - {M_z}}} = {C_{2,{\theta _z} - {F_y}}} = \frac{{12}}{{{E_2}{b_2}}}\int\nolimits_0^{2{r_2}} {\frac{{2{r_2} - x}}{{{{[{t_2} + {r_2} - \sqrt {x(2{r_2} - x)} ]}^3}}}} {\rm{d}}x\\ {C_{2,{\theta _z} - {M_z}}} = \frac{{12}}{{{E_2}{b_2}}}\int\nolimits_0^{2{r_2}} {\frac{1}{{{{[{t_2} + {r_2} - \sqrt {x(2{r_2} - x)} ]}^3}}}} {\rm{d}}x \end{gathered} \right.{\text{ }} $$ (9) -
假设弹性结构在支座约束下无刚性位移,轴力和剪力对变形的影响忽略不计,文中选用悬臂梁等效分析,如图6所示,其中
$O$ 、$E$ 点为固定端,D点为中点,在D点增加转动约束${M_D} = 0$ ,该等效模型为超静定结构。为解除$E$ 处的约束,用未知广义力${X_1}$ 、${X_2}$ 、${X_3}$ 代替约束,${X_4}$ 为未知转动约束力。$l$ 为柔性铰链的有效长度,弹性片厚度为$t$ ,宽度为$h$ 。
图 6 弹性片型柔性铰链结构等效分析示意图
Figure 6. Schematic diagram of equivalent analysis of elastic sheet flexure hinge
在D点和E点分别施加与
${F_D}$ 和未知力${X_i}$ (i=1,2,3,4)同方向的单位力,悬臂梁截面上引起的弯矩为:$$ {\overline M _{{X_1}}}(x) = l - x $$ (10) $$ {\overline M _{{X_2}}}(x) = 0 $$ (11) $$ {\overline M _{{X_3}}}(x) = 1 $$ (12) $$ {\overline M _{{X_4}}}(x) = \left\{ {\begin{array}{*{20}{c}} 1&{0 \leqslant x \leqslant \dfrac{l}{2}} \\ 0&{\dfrac{l}{2} \leqslant x \leqslant l} \end{array}} \right. $$ (13) $$ {\overline M _D}(x) = \left\{ {\begin{array}{*{20}{c}} {\dfrac{l}{2} - x}&{0 \leqslant x \leqslant \dfrac{l}{2}} \\ {0{\text{ }}}&{\dfrac{l}{2} \leqslant x \leqslant l} \end{array}} \right. $$ (14) 由于E处在原约束条件下为固定端约束,D处转动约束为0,由协调变形条件可知,
${\Delta _i} = 0$ (i=1,2,3,4),${\Delta _i}$ 表示E点沿${X_i}$ 方向的位移或转角,其表达式为:$$ {\Delta _i} = {\delta _{i1}}{X_1} + {\delta _{i2}}{X_2} + {\delta _{i3}}{X_3} + {\delta _{i4}}{X_4} + {\Delta _{iF}} = 0 $$ (15) 式中:
${\delta _{ij}}$ (i=1,2,3,4;j=1,2,3,4)表示在E处沿${X_i}$ 方向作用单位力所引起的${X_j}$ 方向的位移;${\Delta _{iF}}$ (i=1,2,3,4)为悬臂梁在${F_D}$ 单独作用下引起的位移。其表达式分别为:$$ {\delta }_{ij}={\displaystyle {\int _{l}}\frac{{\overline{M}}_{i}(x){\overline{M}}_{j}(x)}{EI}}{\rm{d}}x\text{ }(i=1,2,3,4\text{;}j=1,2,3,4) $$ (16) $$ {\Delta }_{iF}={\displaystyle {\int _l}\frac{{F}_{D}{\overline{{M}_{D}}}\;{\overline{{M}_{i}}}}{EI}}{\rm{d}}x (i=1,2,3,4) $$ (17) 将公式(15)使用矩阵形式进行表达,同时联立公式(10)~(14)、(16)~(17),得:
$$ \left( {\begin{array}{*{20}{c}} {\dfrac{{{l^3}}}{{3EI}}}&0&{\dfrac{{{l^2}}}{{2EI}}}&{\dfrac{{3{l^2}}}{{8EI}}} \\ 0&0&0&0 \\ {\dfrac{{{l^2}}}{{2EI}}}&0&{\dfrac{l}{{EI}}}&{\dfrac{l}{{2EI}}} \\ {\dfrac{{3{l^2}}}{{8EI}}}&0&{\dfrac{l}{{2EI}}}&{\dfrac{l}{{2EI}}} \end{array}} \right)\left\{ {\begin{array}{*{20}{c}} {{X_1}} \\ {{X_2}} \\ {{X_3}} \\ {{X_4}} \end{array}} \right\} + \left\{ {\begin{array}{*{20}{c}} { - \dfrac{{5{l^3}{F_D}}}{{48EI}}} \\ 0 \\ { - \dfrac{{{l^2}{F_D}}}{{8EI}}} \\ { - \dfrac{{{l^2}{F_D}}}{{8EI}}} \end{array}} \right\} = 0 $$ (18) 简化公式(18)得:
$$ {X_1} = \frac{{{F_D}}}{2}\text{;}{X_3} = - \frac{{l{F_D}}}{8}\text{;}{X_4} = 0{\text{ }} $$ (19) 由
${F_D}$ 和${X_i}$ 引起的悬臂梁截面上的弯矩为:$$ \begin{split} M(x) =& \left\{ {\begin{array}{*{20}{c}} {{X_1}(l - x) + {X_3} + {X_4} - {F_D}\left(\dfrac{l}{2} - x\right)}&{0 \leqslant x \leqslant \dfrac{l}{2}} \\ {{X_1}(l - x) + {X_3}{\text{ }}}&{\dfrac{l}{2} \leqslant x \leqslant l} \end{array}} \right. \hfill \\ {\text{ = }}& \left\{ {\begin{array}{*{20}{c}} {\dfrac{{{F_{Dx}}}}{2} - \dfrac{{l{F_D}}}{8}{\text{ }}}&{0 \leqslant x \leqslant \dfrac{l}{2}} \\ { - \dfrac{{{F_D}}}{2}x + \dfrac{{3l{F_D}}}{8}}&{\dfrac{l}{2} \leqslant x \leqslant l} \end{array}} \right. \end{split} $$ (20) 由卡氏第二定理可知D点的挠度为:
$$ \begin{split}{\delta }_{D}=&{\displaystyle {\int_{l} }\dfrac{M(x)}{{E}_{2}I}\cdot \dfrac{\partial M(x)}{\partial {F}_{D}}}{\rm{d}}x \text{=}\\ &\dfrac{{F}_{D}}{{E}_{2}I}{\displaystyle \int\nolimits_0^{\frac{l}{2}} {\left(\dfrac{x}{2}-\dfrac{l}{8}\right)}^{2}}{\rm{d}}x+\dfrac{{F}_{D}}{{E}_{2}I}{\displaystyle \int\nolimits_0^{\frac{l}{2}}{\left(\dfrac{3l}{8}-\dfrac{x}{2}\right)}^{2}}{\rm{d}}x \text{=}\\ &\dfrac{{F}_{D}{l}^{3}}{192{E}_{2}I}\end{split} $$ (21) 式中:
$I = \dfrac{{ht{}^3}}{{12}}$ 为截面惯性矩。弹性片型柔性铰链结构的柔度为:
$$ {C_D} = \frac{{{\delta _D}}}{{{F_D}}} = \frac{{{l^3}}}{{16{E_2}h{t^3}}} $$ (22) -
柔性支撑座在X方向上的等效力模型如图7所示。其中,
${C_{3,x - {F_x}}} = \dfrac{1}{{{E_2}{b_3}}}\displaystyle\int\nolimits_0^{2{r_2}} {\dfrac{1}{{{t_2} + {r_2} - \sqrt {x(2{r_2} - x)} }}} {\rm{d}}x$ 。
图 7 柔性支撑座在X方向上的等效力模型
Figure 7. Equal mechanical model for flexible supports in the X-axis direction
基于串并联弹簧的计算原理,柔性支撑座在X方向的整体柔度为:
$$ {C_{3x}} = \dfrac{1}{{\dfrac{1}{{2{C_{2,x - {F_x}}}}} + \dfrac{1}{{2{C_{3,x - {F_x}}}}} + \dfrac{1}{{2{C_{2,x - {F_x}}}}}}} = \dfrac{{2{C_{2,x - {F_x}}}{C_{3,x - {F_x}}}}}{{{C_{3,x - {F_x}}} + 2{C_{2,x - {F_x}}}}} $$ (23) 柔性支撑组件在X方向的整体位移为:
$$ {u}_{x}={C}_{1,x-{F}_{x}}\cdot{F}_{{x}_{1}}+{C}_{D}\cdot{F}_{D}+{C}_{3x}\cdot{F}_{{x}_{2}} $$ (24) 式中:
$ {F_{{x_1}}} = {F_{{x_2}}} = {F_D} $ 。则柔性支撑组件在X方向的整体柔度为:$$ {C_x} = {C_{1,x - {F_x}}} + {C_D} + {C_{3x}} $$ (25) -
为使透镜达到最优面形精度及位置精度,在有限空间内对柔性支撑组件进行优化分析。透镜的面形精度无法利用解析式进行表达,通常是采用有限元分析其变形,再通过曲面拟合得到面形精度值。因此,优化模型无法直接使用面形精度作为约束条件或目标函数,同时面形精度随着透镜与柔性单元作用力的增大而变差[11]。文中以柔性支撑组件的总变形能为目标函数,将透镜位置精度及尺寸参数作为约束条件。
$$ \begin{split}& \;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\min \frac{1}{2}n{K_x}\delta _{^T}^2 \hfill \\ &{\rm{s.t.}}\left\{ {\begin{array}{*{20}{l}} {{u_x} < 0.1{\text{ }}} \\ {{\sigma _f} \leqslant {\sigma _{f\max }}} \\ {{\sigma _g} \leqslant {\sigma _{g\max }}} \\ {50 \leqslant {b_1} \leqslant 70,{\text{ }}20 \leqslant {b_2} \leqslant 40,{\text{ }}5 \leqslant {b_3} \leqslant 12} \\ {0.1 \leqslant {r_1} \leqslant 2,{\text{ }}0.1 \leqslant {r_3} \leqslant 3} \\ \begin{gathered} 30 < l < 50{\text{ }} \hfill \\ 10 < h < 30{\text{ }} \hfill \\ \end{gathered} \\ {0.5 < t < 2{\text{ }}} \\ {0.1 < {t_1} < 6,{\text{ }}0.1 < {t_2} < 10} \end{array}} \right. \end{split} $$ (26) 式中:
$ {\delta _T} $ 为温差$\Delta T$ 下的透镜径向变形;${K_x}$ 为柔性支撑组件在X方向的整体刚度;${\sigma _f}$ 和${\sigma _{f\max }}$ 分别为柔性单元的应力和材料的最大许用应力;${\sigma _g}$ 和${\sigma _{g\max }}$ 分别为连接点处应力和光学元件材料的最大许用应力。由公式(7)、(9)、(21)~(25)可知,柔度性能
$ {C_x} $ 与${b_1}$ 、$h$ 、${b_2}$ 、${b_3}$ 成单调递减关系。而其他参数对柔度$ {C_x} $ 影响复杂,其定量关系如图8所示。
图 8 柔度
${C_x}$ 随各设计参数间的变化关系Figure 8. Relationship between flexibility Cx and design parameters
根据图8可知,柔性支撑组件在X方向的整体柔度
$ {C_x} $ 与铰链最小厚度${t_1}$ 、${t_2}$ ,弹性片厚度$t$ 成反比关系,与圆弧半径${r_1}$ 、${r_2}$ ,柔性铰链的有效长度$l$ 成正比关系,且$t$ 对$ {C_x} $ 的敏感度最高。根据实际工况以、及应用情况,确定铰链设计参数如下:铰链宽度
${b_1} = 60\; {\rm{mm}}$ ,${b_2} = 34\; {\rm{mm}}$ ,${b_3} = 9\; {\rm{mm}}$ ,弹性片型柔性铰链的宽度$h = 16\; {\rm{mm}}$ 。在温度为40 ℃、水平放置(重力沿Z方向)的情况下对透镜组件进行有限元仿真分析,进而确定其最终优化结果如表2所示,透镜的面形精度较初始设计提高了71%。表 2 柔性铰链支撑结构优化结果
Table 2. Optimization results of flexure hinge support structure
Parameter Initial Optimized r1/mm 0.1 0.5 r2/mm 0.2 0.5 l/mm 15 40 t/mm 1.2 0.6 t1/mm 6 3 t2/mm 7 6 Surface and position accuracy RMS/nm 39.498 11.272 Maximum deformation x/mm 0.0532 0.0515 -
由图9及上述理论分析可知,径向柔性支撑结构对透镜的面形精度及位置精度的影响显著。为验证理论推导过程的准确性,分别采用有限元仿真和试验测试进行验证。

图 9 径向柔性支撑结构及其有限元模型
Figure 9. Radial flexible support structure and its finite element model
-
首先验证径向柔性支撑结构的刚度,其有限元网格划分模型如图9所示。各几何参数下的径向柔性支撑结构的刚度理论值和仿真结果数据如表3所示。
表 3 径向柔性支撑结构的刚度理论值(An)与仿真数据(FEA)的比较
Table 3. Comparison of theoretical stiffness (An) and FEA of radial flexible support structure
Number Parameter/mm Stiffness/105 N·m−1 Error l t h FEA An 1 40 0.6 16 0.991 0.985 0.62% 2 40 0.6 20 1.229 1.231 0.16% 3 40 1.0 16 4.762 4.560 4.24% 4 36 0.8 16 3.203 3.417 6.74% 5 36 1.0 16 6.255 6.515 4.16% 6 36 1.0 20 7.819 8.183 4.65% 7 46 1.0 16 2.998 2.840 5.27% 8 46 1.0 20 3.748 3.545 5.42% 9 46 1.2 16 5.181 5.225 0.85% 10 46 1.2 20 6.476 6.575 1.53% 由表3可知,理论值与仿真结果吻合,有限元仿真刚度与理论刚度相比较,最大误差在7%以内。误差可能由于理论计算建立在柔性铰链的悬臂梁等一系列假设的前提下,忽略了应力集中等因素造成。
-
以表3中第一组数据的几何参数设计试验验证柔度理论计算过程。试验装置由拉压机、计算机、辅助测试工装、位移传感器及试验件组成,如图10所示。

图 10 试验测试装置
Figure 10. Test test equipment
加工四组试验件进行试验,避免了因加工误差过大导致试验结果不准确。将辅助测试工装与试验件连接,辅助测试工装固定在拉压机末端执行器上,拉压机上平台以0.5 mm/min的速度向上运动拉伸试验件,利用位移传感器得出试验件位移变化量,利用最小二乘法对试验数据进行拟合,试验件刚度与理论值如表4所示。
表 4 径向柔性支撑结构的刚度理论值(An)和试验值(Ex)的比较
Table 4. Comparison of theoretical (An) and teststiffness (Ex) of radial flexible support structures
Number Stiffness/105 N·m−1 Error Ex An 1 1.000 0.985 1.52% 2 0.923 0.985 6.29% 3 1.025 0.985 4.06% 4 1.039 0.985 5.48% 由表4可知,理论值计算与试验结果吻合,验证了理论推导过程,但存在误差。误差可能源于以下几方面:(1)试验装置、测试工装的精度及试验件的加工误差;(2)有限元分析中将柔性铰链连续体进行离散化计算,单元网格划分的大小都会产生误差。
-
在透镜使用过程中,要求在各工况下其位置精度不得超过0.1 mm,同时,为避免在运输过程中出现共振,破坏光学元件,透镜组件的固有频率需大于运输过程中的扰动频率,通常情况下,扰动频率小于10 Hz。因此,分别对透镜组件进行静力学仿真分析及模态分析,判断其位置精度及模态是否满足要求。透镜组件整体有限元模型如图11所示。

图 11 网格划分
Figure 11. Mesh division
-
将柔性支撑结构底座固定,对透镜组件进行静力学分析,包括在X、Y、Z三个方向的自重变形(Z为光轴方向)以及在要求的环境温度为−10 ℃和+40 ℃工况下的变形,分析结果如图12所示,透镜在各个工况下的刚体位移如表5所示。从分析结果可以看出,透镜的最大变形位移为
$5.10 \times {10^{ - 2}}\;{\rm{mm}} < 0.1 \;{\rm{mm}}$ ,满足位置精度要求。表 5 各工况下透镜静力学仿真变形位移数据
Table 5. Deformation and displacement data of lens statics simulation under various working conditions
Load case Maximum deformation x/mm Grav _X 7.61×10−3 Grav _Y 7.61×10−3 Grav _Z 4.62×10−3 Temp_−10 7.66×10−2 Temp_+40 5.10×10−2 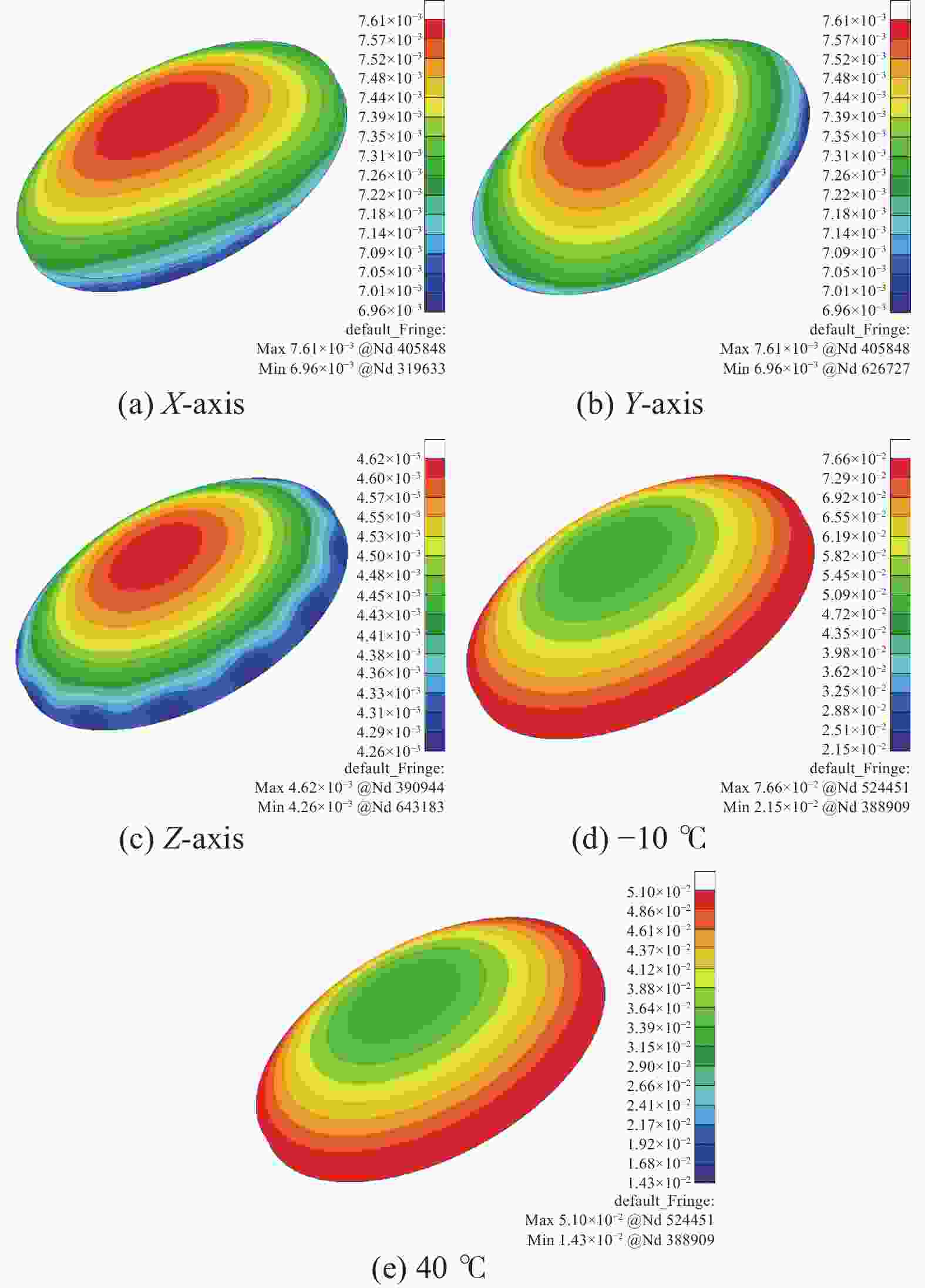
图 12 各工况下仿真结果
Figure 12. Simulation results under various working conditions
-
在运输以及使用过程中,透镜组件受到振动、噪声等一系列复杂情况影响,需要足够的机械性能来保证其安全。因此,对透镜组件进行模态分析,其前三阶振型及频率如表6和图13所示。可知,透镜组件的一阶固有频率为183.97 Hz,大于10 Hz,满足实际使用要求。
表 6 透镜组件前3阶模态分析结果
Table 6. Modal analysis results of lens subassembly
Order Frequency/Hz Mode shapes 1 183.97 Move along X-axis 2 183.97 Move along Y-axis 3 234.35 Move along Z-axis 
图 13 透镜组件前三阶振型图
Figure 13. The first three order mode shapes of the lens assembly
-
变形前后的上下表面的节点信息是离散型数据不能直接得出透镜的面形精度,利用最小二乘法曲面拟合[18]计算出透镜上下表面的面形精度,验证其是否符合要求。
-
如图14所示,由于透镜的几何特性,选择球面面形数据拟合,其圆心坐标向量为
${{\boldsymbol{X}}_c} = \left( {{X_c},{Y_c},{Z_c}} \right)$ ,给定点的坐标向量为${{\boldsymbol{X}}_i} = \left( {{X_i},{Y_i},{Z_i}} \right)$ ,最近的几何对应点的坐标向量为${\boldsymbol{X}}_{_i}^{'} = ( {X_{_i}^{'},Y_{_i}^{'},Z_{_i}^{'}})$ 。误差距离向量为${\boldsymbol{X}}_{_i}^{''} = ( {X_{_i}^{''},Y_{_i}^{''},Z_{_i}^{''}})$ ,则:$$ {R^2} = \left\| {{{\boldsymbol{X}}_i} - {{\boldsymbol{X}}_c}} \right\|, ({X}_{i}\ne {X}_{c}) $$ (27) $$ {\boldsymbol{X}}_i^{'} = {{\boldsymbol{X}}_c} + R\frac{{{{\boldsymbol{X}}_i} - {{\boldsymbol{X}}_c}}}{{\left\| {{{\boldsymbol{X}}_i} - {{\boldsymbol{X}}_c}} \right\|}} ,{\text{ }}i = 1,2\cdots,m $$ (28) 利用高斯-牛顿迭代法可得出最佳参数向量为:
$$ {{\boldsymbol{a}}^{\rm{T}}} = (R,{\boldsymbol{X}}_{_c}^{\rm{T}}) = (R,{{\boldsymbol{X}}_c},{{\boldsymbol{Y}}_c},{{\boldsymbol{Z}}_c}) $$ (29) 雅可比矩阵为:
$$ \begin{split} {{\boldsymbol{J}}_{{\boldsymbol{X}}_i^{'},{\boldsymbol{a}}}} =& \frac{{\partial X_i^{'}}}{{\partial {\boldsymbol{a}}}} = \frac{\partial }{{\partial a}}[{{\boldsymbol{X}}_c} + R\frac{{{{\boldsymbol{X}}_i} - {{\boldsymbol{X}}_c}}}{{\left\| {{{\boldsymbol{X}}_i} - {{\boldsymbol{X}}_c}} \right\|}}] \hfill {\text{ = }}\\ &\frac{{\partial {{\boldsymbol{X}}_c}}}{{\partial {\boldsymbol{a}}}} + \frac{{{{\boldsymbol{X}}_i} - {{\boldsymbol{X}}_c}}}{{\left\| {{{\boldsymbol{X}}_i} - {{\boldsymbol{X}}_c}} \right\|}}\frac{{\partial R}}{{\partial a}} - \frac{R}{{\left\| {{{\boldsymbol{X}}_i} - {{\boldsymbol{X}}_c}} \right\|}} \hfill \times\\ &{\text{ }} \left[ {{\boldsymbol{I}} - \frac{{({{\boldsymbol{X}}_i} - {{\boldsymbol{X}}_c}){{({{\boldsymbol{X}}_i} - {{\boldsymbol{X}}_c})}^{\rm{T}}}}}{{{{\left\| {{{\boldsymbol{X}}_i} - {{\boldsymbol{X}}_c}} \right\|}^2}}}} \right]\frac{{\partial {{\boldsymbol{X}}_c}}}{{\partial {\boldsymbol{a}}}} \hfill \\ \end{split} $$ (30) 其中,
$\dfrac{{\partial R}}{{\partial {\boldsymbol{a}}}} = (1\left| {{{\boldsymbol{0}}^{\rm{T}}}} \right.)$ ;$\dfrac{{\partial {{\boldsymbol{X}}_{\boldsymbol{c}}}}}{{\partial {\boldsymbol{a}}}} = ({\boldsymbol{0}}\left| {\boldsymbol{I}} \right.)$ 。同时
$$ {\boldsymbol{X}}_i^{''} = {{\boldsymbol{X}}_i} - {\boldsymbol{X}}_i^{'} = {\boldsymbol{J}}\Delta {\boldsymbol{a}} $$ (31) 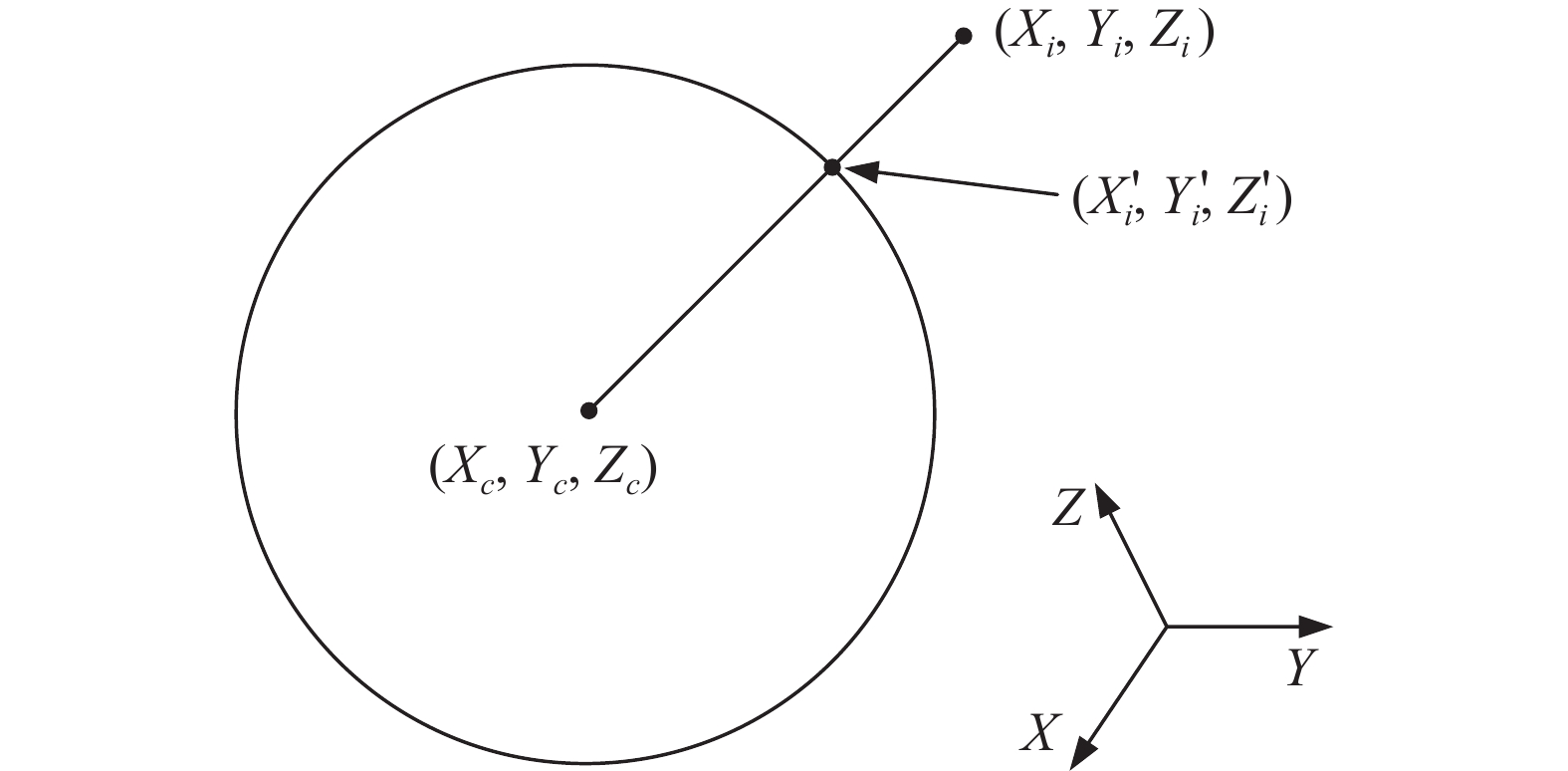
图 14 球面数据拟合原理示意图
Figure 14. Schematic diagram of spherical data fitting principle
-
根据上述几何拟合原理进行数据后处理,得出各工况下的上表面面形精度如表7所示。由数据可得出,在极限温度与极限位姿工况下,镜面面形精度都优于λ/20,满足实际需求。
表 7 透镜组件上表面面形精度分析结果
Table 7. Analysis results of surface precision on lens assembly
Load case PV/nm RMS/nm Grav _X 16.636 6.0695 Grav _Y 16.514 6.0758 Grav _Z 25.506 9.9347 Temp_−10 ℃ 6.4467 1.5756 Temp_+40 ℃ 4.3959 1.0709 在实际应用中,透镜组件主要受温度以及自身重力的影响。以水平放置(重力沿Z方向)以及环境温度为40 ℃工况为例,透镜上表面面形云图如图15所示。从面形云图中可以看出,除了各个支点附近的变形外,镜面其余区域变形均匀变化。

图 15 透镜上表面面形云图
Figure 15. Static surface cloud map of the upper surface of the lens
-
文中以640 mm口径的透镜为研究对象,提出混合柔性支撑结构,能够同时满足透镜面形及位置精度要求。利用卡氏第二定理对各柔节铰链进行理论分析,并推导了透镜支撑结构整体模型。以总变形能为目标函数,并结合实际约束条件对透镜组件整体进行优化,优化结果表明,在极限温度与极限位姿工况下,镜面面形精度都优于λ/20,满足设计指标的要求。相较于柔性铰链与镜座一体式结构设计,所提方案在大口径透镜精度及装调方面有所提高,采用的设计思路及理论分析过程对大口径透镜支撑结构设计具有一定的参考和借鉴意义。
Optimization design of large-aperture lens mixed flexible support structure
-
摘要: 针对大口径透镜,提出了一种新型混合柔性支撑结构,能够使透镜同时满足面形精度及位置精度要求。首先利用卡氏第二定理对各柔性铰链进行分析,建立支撑组件整体柔度模型。然后以柔性支撑组件的总变形能为目标函数,以位置精度及实际使用空间要求为约束,建立结构优化设计模型。之后确定径向柔性支撑结构对组件整体柔度的敏感度最大并对其刚度进行验证。最后对优化后的透镜组件整体结构进行有限元分析,同时利用曲面拟合方法计算镜面面形精度。仿真结果表明,在该新型混合柔性支撑结构的作用下,透镜在各要求工况下的面形精度均优于λ/20 (λ=632.8 nm)。所设计的新型混合柔性支撑结构及其理论分析过程可为高精度大口径透镜的支撑技术提供参考。Abstract: A novel mixed flexible support structure was proposed to satisfy the requirements of surface and position accuracy of a large-aperture lens. First, Castigliano’s second theorem was used to analyze the various flexible hinges and the whole flexibility model of the support component was established. Then, the objective function of the total deformation energy of the flexible support assembly was used to establish the constraint equation based on the position accuracy and the actual space requirements, and a structural optimization design model was established. It was determined that the radially flexible support structure was the most sensitive to the flexibility of the flexible support assembly, and its stiffness was verified. Finally, the finite element analysis of the optimized whole structure of the lens assembly was carried out, and the surface accuracy was obtained by using the geometric fitting method. The simulation results show that the surface shape accuracy of the new hybrid flexible support structure is better than λ/20 (λ=632.8 nm) under various conditions. The novel mixed flexible support structure and its theoretical analysis process can provide a reference for the supporting technology of high precision large-aperture lens.
-
图 6 弹性片型柔性铰链结构等效分析示意图
Figure 6. Schematic diagram of equivalent analysis of elastic sheet flexure hinge
图 7 柔性支撑座在X方向上的等效力模型
Figure 7. Equal mechanical model for flexible supports in the X-axis direction
图 8 柔度
${C_x}$ 随各设计参数间的变化关系Figure 8. Relationship between flexibility Cx and design parameters
图 9 径向柔性支撑结构及其有限元模型
Figure 9. Radial flexible support structure and its finite element model
表 1 材料属性
Table 1. Material properties
Materials H-K9L 4J32 TC4 Density ρ/kg·m−3 2520 8300 4400 Elastic modulus E/GPa 79.2 150 114 Poisson’s ratio μ 0.21 0.30 0.34 Thermal expansion coefficient α/10-6·K−1 7.60 7.50 9.10  下载: 导出CSV
下载: 导出CSV
表 2 柔性铰链支撑结构优化结果
Table 2. Optimization results of flexure hinge support structure
Parameter Initial Optimized r1/mm 0.1 0.5 r2/mm 0.2 0.5 l/mm 15 40 t/mm 1.2 0.6 t1/mm 6 3 t2/mm 7 6 Surface and position accuracy RMS/nm 39.498 11.272 Maximum deformation x/mm 0.0532 0.0515
下载: 导出CSV
表 3 径向柔性支撑结构的刚度理论值(An)与仿真数据(FEA)的比较
Table 3. Comparison of theoretical stiffness (An) and FEA of radial flexible support structure
Number Parameter/mm Stiffness/105 N·m−1 Error l t h FEA An 1 40 0.6 16 0.991 0.985 0.62% 2 40 0.6 20 1.229 1.231 0.16% 3 40 1.0 16 4.762 4.560 4.24% 4 36 0.8 16 3.203 3.417 6.74% 5 36 1.0 16 6.255 6.515 4.16% 6 36 1.0 20 7.819 8.183 4.65% 7 46 1.0 16 2.998 2.840 5.27% 8 46 1.0 20 3.748 3.545 5.42% 9 46 1.2 16 5.181 5.225 0.85% 10 46 1.2 20 6.476 6.575 1.53%
下载: 导出CSV
表 4 径向柔性支撑结构的刚度理论值(An)和试验值(Ex)的比较
Table 4. Comparison of theoretical (An) and teststiffness (Ex) of radial flexible support structures
Number Stiffness/105 N·m−1 Error Ex An 1 1.000 0.985 1.52% 2 0.923 0.985 6.29% 3 1.025 0.985 4.06% 4 1.039 0.985 5.48%
下载: 导出CSV
表 5 各工况下透镜静力学仿真变形位移数据
Table 5. Deformation and displacement data of lens statics simulation under various working conditions
Load case Maximum deformation x/mm Grav _X 7.61×10−3 Grav _Y 7.61×10−3 Grav _Z 4.62×10−3 Temp_−10 7.66×10−2 Temp_+40 5.10×10−2
下载: 导出CSV
表 6 透镜组件前3阶模态分析结果
Table 6. Modal analysis results of lens subassembly
Order Frequency/Hz Mode shapes 1 183.97 Move along X-axis 2 183.97 Move along Y-axis 3 234.35 Move along Z-axis
下载: 导出CSV
表 7 透镜组件上表面面形精度分析结果
Table 7. Analysis results of surface precision on lens assembly
Load case PV/nm RMS/nm Grav _X 16.636 6.0695 Grav _Y 16.514 6.0758 Grav _Z 25.506 9.9347 Temp_−10 ℃ 6.4467 1.5756 Temp_+40 ℃ 4.3959 1.0709
下载: 导出CSV
-
[1] Olivier S S, Riot V J, Gilmore D K, et al. LSST camera optics design [C]//Ground-based and Airborne Instrumentation for Astronomy IV. International Society for Optics and Photonics, 2012, 8446: 84466B. [2] Barto A, Winters S, Burge J, et al. Design and component test results of the LSST Camera L1-L2 lens assembly [C]//Astronomical Optics: Design, Manufacture, and Test of Space and Ground Systems. International Society for Optics and Photonics, 2017, 10401: 104010N. [3] 范磊, 张景旭, 吴小霞, 等. 大口径轻量化主镜边缘侧向支撑的优化设计[J]. 光学精密工程, 2012, 20(10): 2207-2213. doi: 10.3788/OPE.20122010.2207 Fan Lei, Zhang Jingxu, Wu Xiaoxia, et al. Optimum design of edge-lateral support for large-aperture lightweight primary mirror [J]. Optics and Precision Engineering, 2012, 20(10): 2207-2213. (in Chinese) doi: 10.3788/OPE.20122010.2207 [4] 唐境, 张景旭, 安其昌, 等. 大口径巡天望远镜校正镜弹性体支撑[J]. 红外与激光工程, 2020, 49(S1): 217-224. Tang Jing, Zhang Jingxu, An Qichang, et al. Elastomer support for large survey telescope corrector [J]. Infrared and Laser Engineering, 2020, 49(S1): 20200124. (in Chinese) [5] Carey L N , Owen R E , Gunn J E , et al. Support and position control of primary and secondary mirrors on the Sloan Digital Sky Survey (SDSS) telescope [C]//Survey & Other Telescope Technologies & Discoveries. International Society for Optics and Photonics, 2002. [6] Fabricant D G . Design and support of the 1.7-m f/5 secondary mirror for the MMT conversion [C]//Symposium on Astronomical Telescopes & Instrumentation for the Century. International Society for Optics and Photonics, 1994. [7] Cao Yuyan, Wang Zhichen, Zhou Chao. Modeling and optimal design of circular-arch flexible structure with radial-freedom considering geometry and material selection simultaneously [J]. Precision Engineering, 2017, 48: 83-97. doi: 10.1016/j.precisioneng.2016.11.008 [8] 曹玉岩, 王志臣, 周超, 等. 光学元件挠性支撑结构广义建模及优化设计[J]. 光学精密工程, 2016, 24(11): 2792-2803. doi: 10.3788/OPE.20162411.2792 Cao Yuyan, Wang Zhichen, Zhou chao, et al. General modeling and optimal design of flexure supporting structure for optical components [J]. Optics and Precision Engineering, 2016, 24(11): 2792-2803. (in Chinese) doi: 10.3788/OPE.20162411.2792 [9] 王辰忠, 胡中文, 陈忆, 等. 空间引力波望远镜主反射镜系统的结构设计优化[J]. 红外与激光工程, 2020, 49(07): 220-229. Wang Chenzhong, Hu Zhongwen, Chen Yi, et al. Structural design optimization of space gravitational wave telescope primary mirror system [J]. Infrared and Laser Engineering, 2020, 49(7): 20190469. (in Chinese) [10] 曲慧东, 魏加立, 董得义, 等. 长条形空间反射镜组件轻量化结构设计[J]. 红外与激光工程, 2021, 50(06): 187-197. Qu Huidong, Wei Jiali, Dong Deyi, et al. Lightweight structural design of rectangular space mirror assembly [J]. Infrared and Laser Engineering, 2021, 50(6): 20200404. (in Chinese) [11] 曹玉岩, 王志臣, 周超, 等. 考虑材料和几何构型的环形柔性铰链优化设计[J]. 机械工程学报, 2017, 53(09): 46-57. doi: 10.3901/JME.2017.09.046 Cao Yuyan, Wang zhichen, Zhou Chao, et al. Optimization of Circular-axis Flexure Hinge by Considering Material Selection and Geometrical Configuration Simultaneously [J]. Journal of Mechanical Engineering, 2017, 53(9): 46-57. (in Chinese) doi: 10.3901/JME.2017.09.046 [12] 曹玉岩, 王建立, 初宏亮, 等. 大口径光学透镜的双级柔性支撑结构设计[J]. 光学精密工程, 2021, 29(08): 1867-1880. Cao Yuyan, Wang Jianli, Chu Hongliang, et al. Design and analysis of bi-flexible mounting structure for large optical lens [J]. Optics and Precision Engineering, 2021, 29(8): 1867-1880. (in Chinese) [13] 赵磊, 彭海峰, 于新峰, 等. 具有整体径向挠性的光学元件多点均匀支撑结构[J]. 光电工程, 2015, 42(10): 43-48. Zhao Lei, Peng Haifeng, Yu Xinfeng, et al. Lens support structure of multi point equal supporting with wholly radical freedom [J]. Opto-Electronic Engineering, 2015, 42(10): 43-48. (in Chinese) [14] 张刘, 郑潇逸, 张帆, 等. 大容差多柔性透镜组结构优化设计[J]. 吉林大学学报(工学版), 2021, 51(02): 478-485. Zhang Liu, Zhang Xiaoyi, Zhang Fan, et al. Structural optimization design of large tolerance and multi-flexibility lens subassembly [J]. Journal of Jilin University (Engineering and Technology Edition), 2021, 51(2): 478-485. (in Chinese) [15] Karim Tanveer, Lee Jae H, Eisenstein Daniel J, et al. Validation of emission-line galaxies target selection algorithms for the dark energy spectroscopic instrument using the MMT binospec [J]. Monthly Notices of the Royal Astronomical Society, 2020, 497(4): 4587-4601. doi: 10.1093/mnras/staa2270 [16] 张伟, 杨立保, 李清雅, 等. 直圆抛物线复合铰链柔度研究[J]. 红外与激光工程, 2018, 47(11): 258-264. Zhang Wei, Yang Libao, Li Qingya, et al. Research on compliance of compound circular-parabolic hinges [J]. Infrared and Laser Engineering, 2018, 47(11): 1117009. (in Chinese) [17] 赵磊, 纪明, 王佳, 等. 万向柔性铰链连接快速反射镜的设计与仿真[J]. 红外与激光工程, 2019, 48(02): 164-170. Zhao Lei, Ji Ming, Wang Jia, et al. Design and simulation of fast steering mirrors connected by universal flexure hinges [J]. Infrared and Laser Engineering, 2019, 48(2): 0218002. (in Chinese) [18] Lin Yuan, Tong Guo, Zhongjun Qiu, et al. Measurement of geometrical parameters of cutting tool based on focus variation technology [J]. The International Journal of Advanced Manufacturing Technology, 2019, 105(5-6): 2383-2391. doi: 10.1007/s00170-019-04452-0 -

 点击查看大图
点击查看大图

计量
- 文章访问数: 288
- HTML全文浏览量: 103
- PDF下载量: 58
- 被引次数: 0













































































































