













-
毫米波遥感既保持了微波遥感全天时、全天候的特点,又具备较高成像分辨率。因此毫米波遥感作为可见光遥感、红外遥感和微波遥感的有效补充,近些年来成为研究热点[1-3]。被动式毫米波遥感成像技术是通过被动接收目标向外辐射毫米波信号进行遥感成像的技术。研究表明,除了辐射强度外,极化信息中同样包含大量物质信息。通过测量目标极化信息以获取更多遥感探测信息,是被动式毫米波遥感成像领域的一个热点研究方向[4-19]。
瑞士尼泊尔大学2005年搭建了一套全极化被动式毫米波遥感探测雷达系统(SPIRA),该系统采用正交模耦合器结构(Ortho-Mode Transducer,OMT)进行极化分离后,将毫米波信号下变频,最后通过复相关网络实现对全部四个Stokes参量的测量,该系统探测频段为91 GHz,带宽2 GHz,等效噪声温差 (Noise Equivalent Temperature Difference, NETD)约为0.7 K(@18 ms)。尼泊尔大学基于该系统实现对远距离汽车成像,证实了利用极化信息分辨远距离目标金属与非金属材质的可能性[8-10]。美国太平洋西北国家实验室(Pacific Northwest National Laboratory,PNNL)于2013年推出全极化毫米波遥感探测雷达,其链路方案与尼泊尔大学方案类似,但是在OMT结构之后引入了低噪声放大器,链路整体性能获得较大提升,探测频率范围是92~94 GHz,在300 ms积分时间下其NETD达到0.146 K。基于该系统,PNNL对大范围户外场景进行多极化毫米波成像,证实极化信息可以对金属等人造物品进行突出显示[11]。华中科技大学对多极化毫米波遥感探测成像开展了系统化研究工作,采用双极化毫米波探测器绕轴线旋转实现多极化探测的技术路线。双极化毫米波探测器通过OMT结构极化分离后,分别采用两个集成毫米波检波器进行功率检测,探测频带为92~96 GHz,其NETD达到0.454 K(水平极化方向)和0.468 K(竖直极化方向,@5 ms)。华中科技大学通过其自研的多极化被动式毫米波遥感探测雷达,对极化信息与物质材质、角度、距离等关系进行了测试研究,并提出了新的极化信息计算与分析方法,证实了极化信息在被动式遥感探测中的重要性[12-19]。
虽然已经取得了相当的研究成果,但是极化信息与物质材质、形状、距离、观测角度、表面光洁度等多种因素有关,仍有大量问题亟待研究和解决。且到目前为止,公开报道的极化信息探测器均采用链路搭建形式,这样的毫米波探测链路成本昂贵、体积大、功耗高、难以进行大规模集成,只能进行单像素机械扫描成像,严重制约了该研究领域的研究进展与工业应用。
为了解决上述问题,文中发明了一种面向毫米波遥感成像的高集成度双极化毫米波探测器,该探测器采用固态电子学方案,将角锥喇叭天线、OMT结构、两级低噪放芯片以及肖特基二极管检波器全部集成在一起。单支探测器集成两个双极化毫米波探测通道,尺寸不足155 mm×15 mm×20 mm,质量不足0.3 kg。经测量,探测器探测频段为W波段(75~110 GHz),平均NETD达到0.3 K(@10 ms)。可见探测器具有成本低、灵敏度高、集成度高、功耗低、易于大规模集成等优点,为今后工业应用打下基础。为了演示双极化毫米波探测器在毫米波遥感领域的作用,搭建测试系统并对典型城市环境进行了双极化毫米波遥感成像,分析了多种极化特性成像结果,证实双极化毫米波遥感成像可以对城市环境下常见物品进行成像并突出显示,展示了其在物品识别、轮廓提取与远程物质成分识别方面的潜力。
-
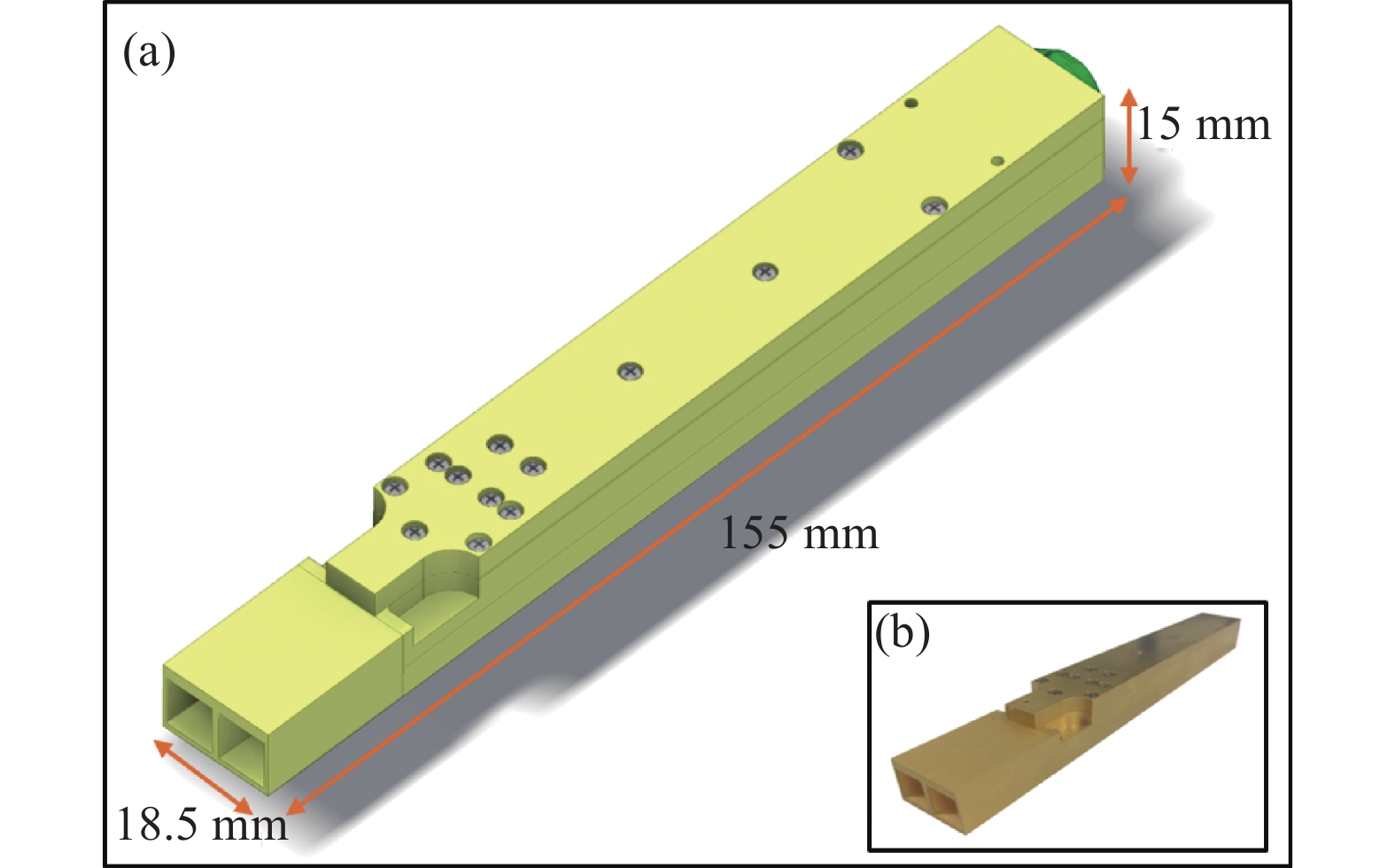
图1所示为双极化毫米波探测器的外观,其中图1(a)为总体外观示意图和尺寸,图1(b)为探测器实物照片。可见单支双极化毫米波探测器尺寸小于155 mm×15 mm×20 mm。探测器壳体采用H62黄铜表面镀金制备而成,质量约为0.3 kg,外部预留螺纹孔方便安装固定。由于该探测器体积小、质量轻、使用方便,很适合进行大规模集成与应用。

图 1 双极化毫米波探测器:(a) 外观示意图与尺寸;(b)实物照片
Figure 1. Dual polarization millimeter-wave detector: (a) Structure diagram and size; (b) Picture
双极化探测器原理框图如图2(a)所示,图2(b)所示为剖面示意图。每支探测器集成两个完全相同的接收通道(Ch1和Ch2),每个通道都可以同时接收水平和竖直两个方向极化信号。通道前端集成方形角锥喇叭天线(Horn antenna),毫米波经过喇叭天线收集后经方形波导导入OMT结构,OMT结构将水平极化信号与竖直极化信号进行分离后通过矩形波导向后传播,极化信号分别经过两级低噪声放大器(LAN1和LAN2, low noise amplifier)后被毫米波检波芯片(square-law detector,SLD)检测转换为电压信号,输出电压经过视频放大器(low-frequency amplifier,LFA)放大后经过集成式电讯连接器(Connector)输出。其中两级低LAN(LAN1和LAN2)、SLD和LFA共同组成一套毫米波直接探测器(direct detection modules,DDM)。电讯连接器选用多芯雷莫连接器,供电输入(+5 V)与信号输出均从同一个连接器完成,使用方便。经实际测量,单支探测器工作功率小于1.5 W。

图 2 双极化毫米波探测器:(a) 原理框图;(b)剖面示意图
Figure 2. Dual polarization millimeter-wave detector’s: (a) Schematic diagram; (b) Sectional drawing
-
双极化毫米波探测器集成方形角锥喇叭天线,喇叭口尺寸如图3(a)所示,喇叭口尺寸为8 mm×8 mm,长度为25 mm,后接2 mm长度2.54 mm×2.54 mm方形波导。

图 3 角锥喇叭天线:(a)尺寸;(b)电磁仿真示意图
Figure 3. Horn antenna: (a) Size; (b) Schematic diagram of electromagnetic simulation
如图3(b)所示,对两个角锥喇叭天线进行了联立电磁仿真,仿真结果显示,两个端口电压驻波比(voltage standing wave ratio,VSWR)在两个极化方向以及W波段内均满足<1.1,满足使用要求。
对角锥喇叭天线在多个频点两个极化方向下的增益和3 dB宽度进行了仿真,仿真结果显示在75~110 GHz范围内,天线增益达到15 dB以上,3 dB波束宽度约为25°左右。
-
OMT结构是一种三端口器件,用于将接收的毫米波信号分离为两个相互垂直的极化信号,是一种非常重要和常用的毫米波器件,在微波与毫米波领域应用广泛。由于OMT结构位于LNA之前,其插入损耗等性能指标将对整个探测器产生严重影响,是文中探测器最重要的组成部分。
综合考虑带宽、损耗、隔离度以及机加工难度等因素,文中采用BФifot型OMT结构。设计的OMT结构如图4(a)所示,OMT结构输入端口为一个2.54 mm×2.54 mm方形波导,输出端口为两个WR10矩形波导(2.54 mm×1.27 mm)。除了输入输出端口外,OMT结构还包含BФifot结、切比雪夫阻抗变换器、E面转弯波导、T型功率合成器和波导转换器五个部分。

图 4 (a) OMT结构示意图;(b) BФifot结尺寸
Figure 4. (a) Structure diagram of OMT; (b) Size of BФifot junction
BФifot结是OMT结构中最重要的部分,它包含T型波导、金属隔板和两个金属杆。T型波导输入端口为2.54 mm×2.54 mm方形波导,左右两侧两个输出端口为WR10矩形波导,中通通道为方形波导。金属隔板对水平极化信号具有截止作用,并将其输出到两侧水平极化波分支通道中,其厚度根据信号波长选择,这里采用0.2 mm金属板,同时为了保证信号带宽,金属隔板设计为台阶结构,设计尺寸见图4(b)。两个金属杆半径为0.2 mm,位于两侧输出波导入口处,可以防止垂直极化信号进入两侧波导,使得垂直信号只能进入垂直极化波直通通道。
垂直极化信号进入直通通道后,首先经过一个四阶切比雪夫阻抗变换器,将方波导转换为矩形波导,再经过三台阶E面转弯波导,以实现阻抗匹配,并尽可能降低损耗,最终到达垂直极化信号输出端口。
水平极化信号经过BФifot结后分成两路进入两侧水平极化波分支通道,然后在T型功率合成器中重新合成一路,最后通过方形波导至矩形波导转换器,最终到达水平极化信号输出端口。
OMT结构作为双极化毫米波探测器的核心组成部分,在设计时,首先对每个组成部分进行了分立仿真,然后对总体结构进行了联合仿真,最后为了验证其性能,单独制造了OMT结构模块并对其性能进行了实际测试。制备的OMT模块如图5(a)所示,图中右侧为圆波导到方波导转换器,该波导转换器用于将测试仪器圆波导转换为OMT结构输入端口的方波导。OMT模块性能测试采用AV3672 D 矢量网络分析仪通过AV3645 A扩频模块扩展到W波段。如图5(b)~(d)所示,依次对波导转换器、竖直极化方向、水平极化方向进行了测试。

图 5 (a) OMT模块与波导转换器照片;(b)波导转换器插损测试;(c) OMT模块竖直极化方向性能测试;(d) OMT模块水平极化方向性能测试
Figure 5. (a) Pictures of OMT module and waveguide converter; (b) Measurement picture of waveguide converter; (c) Measurement picture of horizontal polarization; (d) Measurement picture of vertical polarization
OMT模块的仿真与测试结果见图6与图7,图中展示测试结果已经将波导转换器的影响减除。可见OMT模块在75~110 GHz范围内回波损耗在−10 dB以下,插入损耗在−0.53 dB以下,75~110 GHz范围内插入损耗平均值约为−0.3 dB,性能优良,满足使用需求,测试结果与仿真结果基本相符。

图 6 OMT结构:(a)垂直极化方向插入损耗;(b)水平极化方向插入损耗
Figure 6. OMT structure: (a) Insertion loss of horizontal polarization; (b) Insertion loss of vertical polarization

图 7 OMT结构回波损耗测试与仿真结果
Figure 7. Test and simulation results of OMT structure’s return loss
-
LNA芯片与SLD芯片作为探测器核心芯片,在本设计中均采用相对成熟的商用芯片,以保证其性能与可靠性。
LNA芯片采用OMMIC公司生产的CGY2190 UH/C2型低噪放芯片。CGY2190 UH/C2是一款高性能GaAs低噪放MMIC (单片微波集成电路),在75~110 GHz频段内其增益约为23 dB,噪声系数仅为2.8 dB。
SLD芯片采用OMMIC公司生产的CGY2870 AUH/C1商用芯片。CGY2870 AUH/C1是一款高性能GaAs工艺50 Ω零偏检波二极管,在94 GHz检测灵敏度达到9000 V/W,全频段平均灵敏度达到5000 V/W以上,NEP (等效噪声功率)约为1.1 pW/
$\sqrt {{\rm{Hz}}}$ 。 -
NETD是用来描述毫米波探测器可区分最小温差的物理量,与探测器噪声特性、灵敏度、响应度等指标息息相关,是毫米波探测器最重要的参数之一[14]。
NETD的定义如下:
$$ NETD=\frac{\overline{{{V}_{rms}}}}{{R}_{slope}}=\frac{\overline{{{V}_{rms}}}}{\Delta V/\Delta T} $$ (1) 式中:
$\overline{{V}_{rms}}$ 是毫米波探测器输出电压信号的噪声均方根值 (Root Mean Square,RMS);$ {R}_{slope}=\Delta V/\Delta T $ 是信号的传递函数。实际测量时,通常测量毫米波探测器对不同温度黑体目标响应信号,取所有温度下信号均方根值的均值作为$\overline{{V}_{rms}}$ ,计算VT曲线中线性部分的斜率为$ {R}_{slope} $ [14]。从NETD的定义很明显看出,积分时间增长,$\overline{{V}_{rms}}$ 会减小,并进一步导致NETD降低,因此在测量微弱信号时,可以通过延长积分时间以获得更好的NETD。采用文献[14]所述NETD测试方法,搭建了自动化测试系统,系统如图8所示。毫米波探测器垂直悬挂在水上方,探测器喇叭口距离水面为5 cm,水自身高度不少于2 cm,水面面积足够大以保证覆盖全部毫米波探测器接收角,温度计探头用于水温测量。探测器输出电压与温度计两端电压均通过数据采集卡(Data Acquisition,DAQ)进行采集,采集到的数据送入电脑中进行处理并实时显示结果。

图 8 NETD测试系统示意图
Figure 8. Schematic diagram of NETD measurement system
测量了双极化探测器两个通道四个极化方向的NETD值,测试过程中水温由72 ℃逐渐降低到34 ℃,整个过程约耗时27.2 min,在408个温度点采集数据,相邻温度点间间隔时间约4 s,每个温度点通过2 s积分时间采集获得,每个温度点内采集探测器输出电压200个点(10 ms积分时间),空余时间用于程序运算与结果实时显示。最终测量得到VT曲线如图9(a)所示,进行线性拟合得到直线方程标注在图中,可见四个极化方向偏置电压相差较大,但是斜率
$ {R}_{slope} $ 较为接近。图9(b)所示为探测器在不同温度下$ {V}_{rms} $ 曲线,图中虚线标注为所有温度下$ {V}_{rms} $ 均值$ \overline{{V}_{rms}} $ 。
图 9 (a)不同水温下探测器响应电压曲线;(b)不同水温下探测器响应均方根值
Figure 9. (a) Detector response voltage to the hot water at different temperatures; (b) RMS noise of measured response voltage to the hot water at different temperatures
所有探测器通道的
$ {R}_{slope} $ 、$ \overline{{V}_{rms}} $ 以及NETD值汇总在表1中,可见所有探测器通道的NETD均在0.3 K(10 ms积分时间)以下,证明探测器具有很高的灵敏度,满足被动式毫米波遥感成像使用需求。表 1 NETD测量结果
Table 1. NETD measurement results
Detector Rslope /V·K−1 $\overline{ {V}_{rms} }$ /V NETD/K Ch1-V 0.002 533 29 0.000 670 578 0.265 Ch1-H 0.002 177 11 0.000 571 628 0.263 Ch2-V 0.001 889 29 0.000 509 749 0.270 Ch2-H 0.001 839 05 0.000 570 989 0.310 -
为了验证双极化探测器在被动式毫米波遥感成像中的作用,搭建了一套被动式多极化毫米波遥感探测雷达,在城市环境下进行了双极化被动式毫米波遥感成像实验。
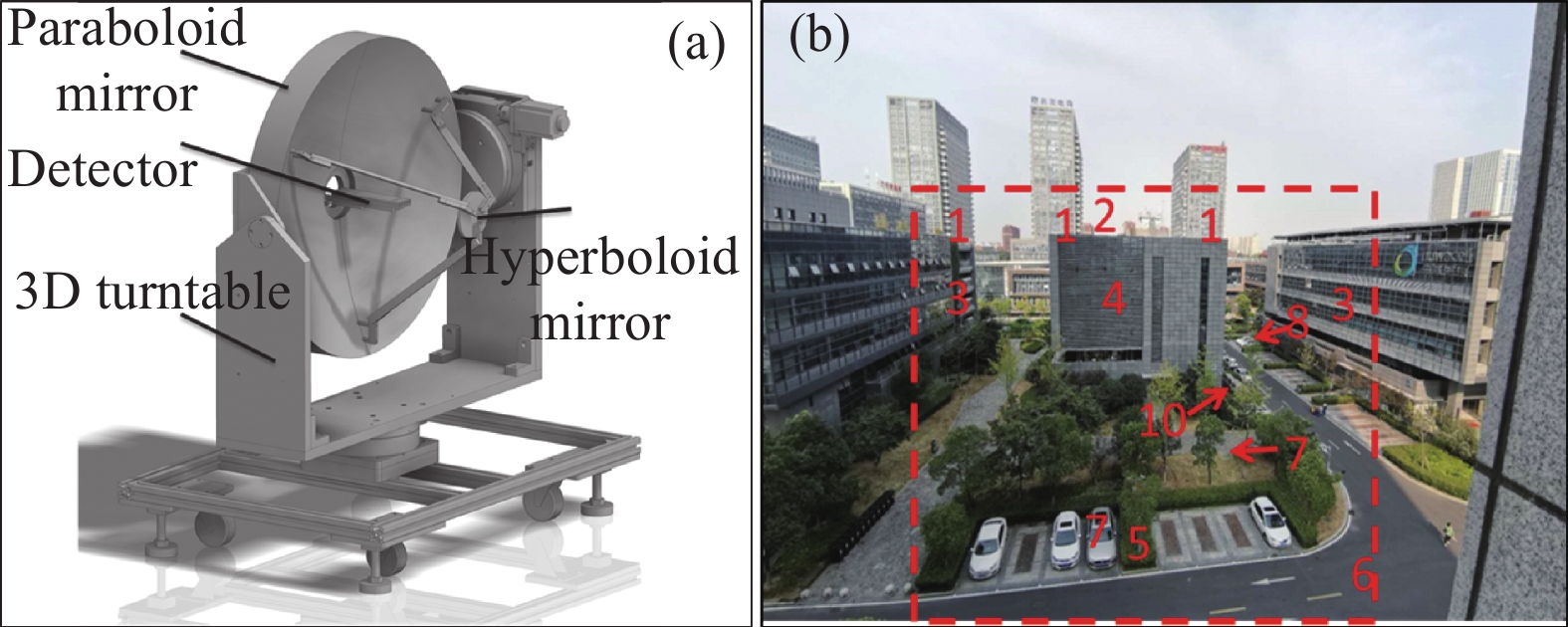
搭建的多极化毫米波遥感探测雷达如图10(a)所示,雷达采用主镜口径0.6 m的卡塞哥伦天线聚焦,使用双极化探测器探测W波段毫米波信号,将收集到的W波段毫米波信号功率转换为输出电压并由DAQ采集,整个结构安装在一套三维电动转台上,可实现水平和俯仰方向机械扫描以及探测器绕轴旋转。详细雷达介绍见参考文献[20],此处不再重复叙述。利用该雷达,对图10(b)所示区域进行了双极化被动式毫米波遥感成像,成像区域覆盖水平方向−30°~30°,竖直方向覆盖−50°~10°,雷达安置在5楼上,向下倾斜成像,目标成像距离约为50~300 m,每个像素点积分时间为12.5 ms,扫描角度间隔为0.05°,测试时的气温约为30 ℃。

图 10 (a)被动式多极化毫米波遥感探测雷达示意图;(b)成像区域光学照片
Figure 10. (a) Schematic diagram of multi-polarization passive millimeter-wave remote radar; (b) Visible image of imaging scenes
全极化信息可以采用TI、TQ、TU、TV四个Stokes参量表述[14,17],其计算公式如下,其中TI、TQ、TU、TV表述四个Stokes参量,TBh、TBv、
$ T{B}_{+45°} $ 、$ T{B}_{−45°} $ 、TBcl、TBcr分表表示水平极化信号、竖直极化信号、+45°极化信号、−45°极化信号、左旋极化信号、右旋极化信号,此处角度以水平线为参考平面。$$ \left[\begin{array}{c}T I\\ T Q\\ T U\\ T V\end{array}\right]=\left[\begin{array}{c}(T Bh+T Bv)/2\\ T Bv-T Bh\\ T {B}_{+45^{\circ}}-T {B}_{-45^{\circ}}\\ T Bcl-T Bcr\end{array}\right] $$ (2) 双极化测量时,将双极化毫米波探测器水平放置,同时完成TBh和TBv的探测,并可根据式(2)计算得到TI和TQ两个Stokes参量。进一步的,根据文献[14,17],还可以计算得到线性极化差异率(linear polarization difference ratio, LPDR)、单一极化率(the degree of sole polarization, DoSP)、线性极化率(linear polarization ratio,LPR)、线性极化率1(modified LPR 1,mLPR1)、极化率(polarization percentage, PP),同时提出了一种新的计算参量、线性极化率4(modified LPR 4,mLPR4),上述参量计算方法汇总如下。
$$ LPDR=\frac{Tob j-T Bv}{T Bv-TBh} $$ (3) $$ DoS P=\frac{Tob j-T Bv}{2T ob j-T Bv-T Bh} $$ (4) $$ LP R=\frac{T Bh-T ob j}{T Bv-T ob j} $$ (5) $$ mLPR1=\frac{T Bh-E\left(T I\right)}{T Bv-E\left(T I\right)} $$ (6) $$ mLPR4=\frac{T Bh}{T Bv} $$ (7) $$ P P=\frac{\left|T Q\right|}{T I} $$ (8) 式中:Tobj为物体的实际温度(文中全部按照303 ℃计算);E(TI)为所有像素点TI的平均值;M(TI)为所有像素点TI的中间值。
探测得到的TBh和TBv图像如图11所示。图中红色表示毫米波亮温高,蓝色表示毫米波亮温低。为了方便描述,在成像范围内选取了10个区域进行编号,对应的区域编号在图10(b)中标出。区域1表示远处的高层建筑,区域3表示视场范围两侧的高层建筑,主要材料为混凝土,区域6表示沥青道路和石板路,毫米波吸收系数较高,在太阳照射下本身温度也较高,因此表现出较高的毫米波亮温(深红色)。区域2表示远处的天空,呈现出较低的亮温。区域5表示植被,富含水分,辐射系数高,但是本身温度明显低于沥青道路,因此呈现出浅红色。区域7~10分别表示停在近处的汽车、停在远处的汽车、下水道井盖、空调外机,这些都是金属制品,本身不向外辐射毫米波信号,主要反射外界毫米波信号,由于总有一些角度反射的是来自天空的极冷信号,因此这些金属制品也表现出很低的毫米波亮温(蓝色)。区域4表示的是对面建筑窗户外侧向外倾斜45°的挡板,这些挡板同样主要反射天空信号,因此毫米波亮温较低。

图 11 双极化毫米波遥感成像结果
Figure 11. Dual-polarization millimeter-wave remote sensing imaging
TI图像表示毫米波强度分布图,无极化信息,得出的结论与TBh和TBv基本相同。TQ图像表示水平和竖直两个极化方向信号强度的差,很明显天空、混凝土墙面、沥青道路、石板路和窗户挡板等目标表现出较小的极化差别,而汽车则呈现出一定的区别,这是由于汽车为金属材质且角度众多,某些角度反射了环境中的极化信号,导致汽车呈现出一定的极化差异。
LPR图像与mLPR1
图像中汽车等金属制品呈现出剪影效果,其边缘轮廓可以方便的提取出来,这与文献[14,17]的描述是一致的。 LPDR和DoSP图像中,不同材质的物品,如汽车(金属)、绿色植被与地面(包括石板路、沥青路和干草土路)之间呈现出较为明显的区别,尤其是在LPDR图片中,汽车的前挡板(金属)和挡风玻璃(玻璃)呈现出明显的区别。这表明LPDR和DoSP图像有助于金属制品的识别和检出,并且具备一定的物质材质区分能力。
mLPR4
和PP表示水平与竖直两个极化方向之间的差异,与TQ图像类似,混凝土、石板路、植被、天空以及窗户挡板等非极化材质物品由于信号很小而变得无法辨认,这就使得汽车等极化差异物品被突出显示,很容易识别出。相比之下,mLPR4的突出显示效果更加明显。这有助于从自然环境中发现人造金属制品。 -
文中设计的双极化毫米波探测器,具有成本低、灵敏度高、集成度高、功耗低、易于大规模集成等优点。利用该双极化探测器获取了城市环境下被动式双极化毫米波遥感成像结果,很好地演示了该双极化探测器在被动式多极化毫米波遥感成像领域的应用价值与潜力。该双极化毫米波探测器的发明,为被动式多极化毫米波遥感成像实际应用打下基础。
Dual polarization millimeter-wave detector for millimeter-wave remote sensing imaging
-
摘要: 针对多极化毫米波遥感成像重大需求,报道了一种高集成度双极化毫米波探测器。探测器采用固态电子学方案,通过喇叭天线接收毫米波信号,利用正交模耦合器进行极化信号分离,采用两级低噪放芯片放大信号,通过肖特基二极管实现功率检测。每支探测器集成两路接收通道,每个接收通道可同时探测水平与竖直两个极化方向信号。经测量,探测器探测频段为W波段(75~110 GHz),平均等效噪声温差达到0.3 K(@10 ms),尺寸不足155 mm×15 mm×20 mm,质量<0.3 kg。利用该探测器实现城市环境双极化毫米波遥感成像,成像结果表明,相比于单极化遥感成像,双极化遥感成像可以获得更多极化信息,可对城市环境下常见物品进行突出显示,这有助于今后进行自动物品识别、轮廓提取与远程物质成分识别。Abstract: To meet the great demand of multi polarization millimeter-wave remote sensing imaging, a highly integrated dual polarization millimeter-wave detector is reported. The detector adopts the solid-state electronics scheme. A horn antenna is used to collect the millimeter-wave radiation signal. An ortho-mode transducer structure (OMT) is utilized to orthogonal polarization states of the incident signal into the vertical and horizontal polarization channels. Dual polarization signal power detection is realized by Schottky diode detector after two stage low noise amplifier. The detector, which shows a high level of integration, has two same channels while each channel can receive two orthogonal polarization states of the incident millimeter-wave radiation simultaneously. The measurement results display that the detection band is W-band (75-110 GHz), the average Noise Equivalent Temperature Difference(NETD) reaches 0.3 K(@10 ms), the detector’s size is less than 155 mm×15 mm×20 mm, and the detector’s weight is less than 0.3 kg. Based on the dual polarization detector, an outdoor area in the city has been imaged and various polarization parameter images are generated to analyze the polarization characteristics. The results show that, compared with single polarization remote sensing, dual polarization remote sensing can obtain more polarization information, common objects in urban environment can be highlighted, which is helpful for automatic object recognition, contour extraction in the future, and remote material component recognition.
-
Key words:
- millimeter /
- detect /
- polarization /
- remote sensing /
- imaging
-
图 1 双极化毫米波探测器:(a) 外观示意图与尺寸;(b)实物照片
Figure 1. Dual polarization millimeter-wave detector: (a) Structure diagram and size; (b) Picture
图 2 双极化毫米波探测器:(a) 原理框图;(b)剖面示意图
Figure 2. Dual polarization millimeter-wave detector’s: (a) Schematic diagram; (b) Sectional drawing
图 3 角锥喇叭天线:(a)尺寸;(b)电磁仿真示意图
Figure 3. Horn antenna: (a) Size; (b) Schematic diagram of electromagnetic simulation
图 4 (a) OMT结构示意图;(b) BФifot结尺寸
Figure 4. (a) Structure diagram of OMT; (b) Size of BФifot junction
图 5 (a) OMT模块与波导转换器照片;(b)波导转换器插损测试;(c) OMT模块竖直极化方向性能测试;(d) OMT模块水平极化方向性能测试
Figure 5. (a) Pictures of OMT module and waveguide converter; (b) Measurement picture of waveguide converter; (c) Measurement picture of horizontal polarization; (d) Measurement picture of vertical polarization
图 6 OMT结构:(a)垂直极化方向插入损耗;(b)水平极化方向插入损耗
Figure 6. OMT structure: (a) Insertion loss of horizontal polarization; (b) Insertion loss of vertical polarization
图 7 OMT结构回波损耗测试与仿真结果
Figure 7. Test and simulation results of OMT structure’s return loss
图 9 (a)不同水温下探测器响应电压曲线;(b)不同水温下探测器响应均方根值
Figure 9. (a) Detector response voltage to the hot water at different temperatures; (b) RMS noise of measured response voltage to the hot water at different temperatures
图 10 (a)被动式多极化毫米波遥感探测雷达示意图;(b)成像区域光学照片
Figure 10. (a) Schematic diagram of multi-polarization passive millimeter-wave remote radar; (b) Visible image of imaging scenes
表 1 NETD测量结果
Table 1. NETD measurement results
Detector Rslope /V·K−1 $\overline{ {V}_{rms} }$ /VNETD/K Ch1-V 0.002 533 29 0.000 670 578 0.265 Ch1-H 0.002 177 11 0.000 571 628 0.263 Ch2-V 0.001 889 29 0.000 509 749 0.270 Ch2-H 0.001 839 05 0.000 570 989 0.310  下载: 导出CSV
下载: 导出CSV
-
[1] 常庆瑞. 遥感技术导论[M]. 北京: 科学出版社, 2004. [2] Zhang T R, Wang G L, Liang J, et al. Status and trends of space microwave remote sensing technology development [J]. Spacecraft Engineering, 2021, 30(6): 52-61. (in Chinese) doi: 10.3969/j.issn.1673-8748.2021.06.006 [3] Luo Haibo, Zhang Junchao, Gai Xingqin, et al. Development status and prospects of polarization imaging technology [J]. Infrared and Laser Engineering, 2022, 51(1): 20210987. (in Chinese) doi: 10.3788/IRLA20210987 [4] Wang Jun, Jiang Yadong. Research development about room temperature terahertz detector array technology with microbolometer structure (invited) [J]. Infrared and Laser Engineering, 2019, 48(1): 0102001. (in Chinese) doi: 10.3788/IRLA201948.0102001 [5] Wikner D A, Samples G. Polarimetric passive millimeter-wave sensing[C]//Passive Millimeter-Wave Imaging Technology V, SPIE, 2001, 4373: 86-93. [6] Samluk J P, Schuetz C A, Martin R D, et al. 94 GHz millimetre-wave imaging system implementing optical upconversion[C]//Millimetre Wave and Terahertz Sensors and Technology, SPIE, 2008, 7117: 238-244. [7] Wilson J P, Eng D L K, Kozacik S T, et al. Display of polarization information for passive millimeter-wave imagery [J]. Optical Engineering, 2012, 51(9): 091607. doi: 10.1117/1.OE.51.9.091607 [8] Duric A, Magun A, Murk A, et al. The fully polarimetric imaging radiometer SPIRA at 91 GHz [J]. IEEE Transactions on Geoscience and Remote Sensing, 2008, 46(8): 2323-2336. doi: 10.1109/TGRS.2008.917212 [9] Duric A, Mallepell M, Wuetrich M, et al. Fully-polarimetric passive scanning imager at millimeter wavelengths[C]//Passive Millimeter-Wave Imaging Technology VIII, International Society for Optics and Photonics, 2005, 5789: 35-43. [10] Murk A, Stähli O, Mätzler C, et al. Polarimetric imaging with the 91 GHz radiometer SPIRA[C]//Millimetre Wave and Terahertz Sensors and Technology III, International Society for Optics and Photonics, 2010, 7837: 78370F. [11] Tedeschi J, Bernacki B, Sheen D, et al. Fully polarimetric passive w-band millimeter wave imager for wide area search[C]//Polarization Science and Remote Sensing VI, SPIE, 2013, 8873: 243-256. [12] Su Jinlong, Tian Yan, Hu Fei, et al. Material clustering using passive millimeter-wave polarimetric imagery [J]. IEEE Photonics Journal, IEEE, 2019, 11(1): 5500109. doi: 10.1109/JPHOT.2018.2881287 [13] Hu Yan, Hu Fei, Yang Zhengwu, et al. Complex permittivity estimation from millimeter-wave radiometry [J]. IEEE Geoscience and Remote Sensing Letters, 2021, 18(7): 1254-1258. doi: 10.1109/LGRS.2020.2996380 [14] Cheng Yayun, Hu Fei, Wu Hongfei, et al. Multi-polarization passive millimeter-wave imager and outdoor scene imaging analysis for remote sensing applications [J]. Optics Express, 2018, 26(16): 20145. doi: 10.1364/OE.26.020145 [15] Hu Yan, Su Jinlong, Hu Fei, et al. Information extraction from polarized MMW radiation based on the weak correlation between emission and reflection [J]. Optical Materials Express, 2021, 11(7): 2059. doi: 10.1364/OME.430138 [16] Su Jinlong, Wu Hongfei, Li Pengfei, et al. Detection for ship by dual-polarization imaging radiometer [J]. Optics Express, 2021, 29(17): 27830. doi: 10.1364/OE.432432 [17] Tang Fangzhou, Gui Liangqi, Liu Jinbang, et al. Metal target detection method using passive millimeter-wave polarimetric imagery [J]. Optics Express, 2020, 28(9): 13336. doi: 10.1364/OE.390385 [18] Cheng Yayun, Hu Fei, Gui Liangqi, et al. Polarization-based method for object surface orientation information in passive millimeter-wave imaging [J]. IEEE Photonics Journal, 2016, 8(1): 5500112. doi: 10.1109/JPHOT.2015.2507359 [19] Hu Fei, Cheng Yayun, Gui Liangqi, et al. Polarization-based material classification technique using passive millimeter-wave polarimetric imagery [J]. Applied Optics, 2016, 55(31): 8690. doi: 10.1364/AO.55.008690 [20] An Deyue, Tu Hao, Qi Denggang, et al. Outdoor multi-polarization passive millimeter–wave imaging via integrated W-band dual polarization direct detection radiometer [C]//46th International Conference on Infrared, Millimeter and Terahertz Waves (IRMMW-THz). IEEE, 2021: 1-2. -

 点击查看大图
点击查看大图
计量
- 文章访问数: 216
- HTML全文浏览量: 70
- PDF下载量: 48
- 被引次数: 0























