










-
近年来,机器人模式正朝着智能化方向发展[1],作为其重要传感系统的仿生皮肤同样具有了技术升级价值。在非结构化环境中,仿生体需要对环境中接触性物理量进行有效检测以做出自适应决策,而接触量多为动态、连续变化的滑动过程,系统能否对此类滑觉信号的基本特性(如滑动载荷、速度等)信息做出准确识别成为研究的关键。过去数十年中,不同结构形式的接触式传感器与人工电子皮肤(E-skins)已经被提出用于该问题的传感应用[2],包括电容式[3]、压阻式[4]、电磁式[5]、驻极体式[6]等,诸类传感器多以电磁技术为基础,存在灵活性受限、结构繁重、易受环境电磁干扰等不足,难以适配在仿生皮肤应用领域的高柔性、轻结构、抗电抗磁能力强等要求。
如今,光纤布拉格光栅(Fiber Bragg Grating, FBG)传感器因其对机械物理量与温度变化均有较高灵敏度,且具有体积小、灵活性强等特点,已被广泛应用于结构健康检测、医疗监测、智能可穿戴技术等领域[7-9]。若采用硅胶等柔性材料对光纤光栅进行封装处理,制成的柔性传感器有效缓解了光纤质脆问题,同时提升了其检测性能。由于FBG较高的抗电抗磁能力和相对柔性,国内外已有多项研究将其作为仿生皮肤的理想模型。南洋理工大学Suresh[10]等在双碳复合材料层之间引入一层硅胶层,显著提升了非直线型光纤光栅传感器对水平方向力的承受范围。钱牧云[11]等基于优化后的RBF神经网络回归算法对施加在FBG柔性传感器上载荷的大小、位置等信息进行解耦,结果表明对该两种信息识别的最小误差为3.00%、4.82%。冯艳[12]设计了一种滑觉感知单元,可对滑动信号的大小及方向进行判定,并指出接触力大小与滑动速率系数呈反比关系,对0.2~1 N范围内接触力的滑动检测最小灵敏度为3.8 pm/mm。Sun[13]等提出了一种双层FBG阵列结构,对触觉感知精度达7.287 nm/MPa,并引入支持向量机(SVM)模型实现对滑动数据的方向识别。以上内容虽设计了不同数量与阵列分布的FBG传感器,同时对滑觉信号做了一定的探究,但程度依然有限,对该信号的基本特性仍处于现象层面分析,而缺少必要的量化支撑。即使有研究采用人工学习网络对触觉信号进行位置、载荷等特征的识别或解耦,但研究层面仍处于触觉传感静态信号,缺乏对动态连续的滑觉方面的尝试。
文中提出了一种分布式阵列FBG柔性传感器对滑觉信号特性进行分析识别的方法,针对光栅中心波长解调曲线进行处理及取特征值,引入随机森林(RF)与反向传播(BP)神经网络两种回归模型对滑觉样本进行训练并对比了预测效果,结果表明该方法可实现对滑觉载荷与速度两种特性的有效识别。
-
当宽光谱光源透射光纤布拉格光栅时,其表现出对不同频段光源选择性反射特性。根据光纤耦合模理论,因模式耦合使得满足布拉格条件光将被反射[14],该关系描述为:
$$ {\lambda }_{B}=2{n}_{eff}\cdot{\varLambda } $$ (1) 式中:
$ {\lambda }_{B} $ 为光栅中心波长;${n}_{eff}$ 为光纤纤芯有效折射率;${\varLambda }$ 为FBG固定周期。将光纤光栅与柔性材料间能量传递关系视为无损耗的理想贴合状态。FBG中心波长对环境温度、应变压力敏感,当光纤光栅受到上述物理量作用时,相对波长偏移关系由下式给出:$$ \mathrm{\Delta }{\lambda }_{B}=\left[\left(1-{P}_{e}\right)\varepsilon +\left(\alpha +\xi \right)\mathrm{\Delta }T\right]{\lambda }_{B}$$ 式中:
$ {\mathrm{\Delta }\lambda }_{B} $ 为FBG中心波长偏移量;$ {P}_{e} $ 为有效弹光系数;$ \alpha $ 为光纤热膨胀系数;$ \xi $ 为光纤热光系数;$ \mathrm{\Delta }T $ 为光纤温度变化量;$\varepsilon$ 为FBG应变量,包含轴向应变与法向应变。当仅考虑由法向压力$ {F}_{p} $ 导致光纤轴向应变时,波长偏移关系可描述为:$$ \mathrm{\Delta }{\lambda }_{B}=\frac{\left(1-{P}_{e}\right)\left(2v-1\right){\lambda }_{B}\cdot {F}_{p}}{{E}_{m}} $$ 式中:
$ v $ 、$ {E}_{m} $ 分别为柔性材料泊松比和弹性模量。当光纤水平埋置于柔性材料中且受到水平方向的切力时,如图1所示,FBG除压力应变外,还将受到剪切应变,结合材料力学相关知识,此时FBG剪切应变可描述为:
$$ \varepsilon =\frac{f}{{E}_{f}\cdot S+\dfrac{{E}_{m}\cdot b\cdot l\sqrt{{l}^{2}+{h}^{2}}}{2h\left(1+v\right)}} $$ 式中:
$ S $ 、$ {E}_{f} $ 为光纤横截面积和杨氏模量; l、d、h分别为封装体长宽高;$ f $ 为水平方向力。在滑动速度均匀且相对小的条件下,滑觉运动所导致的FBG轴向应变量变化可视为其受压力应变与剪切应变的线性叠加,中心波长偏移可表示为:$$ \Delta {\lambda }_{B}=\left(1-{P}_{e}\right){\lambda }_{B}\frac{\left(2v-1\right){F}_{p}}{{E}_{m}}+ \frac{\left(1-{P}_{e}\right){\lambda }_{B}\cdot f}{{E}_{f}\cdot S+\dfrac{{E}_{m}\cdot b\cdot l\sqrt{{l}^{2}+{h}^{2}}}{2h\left(1+v\right)}} $$ 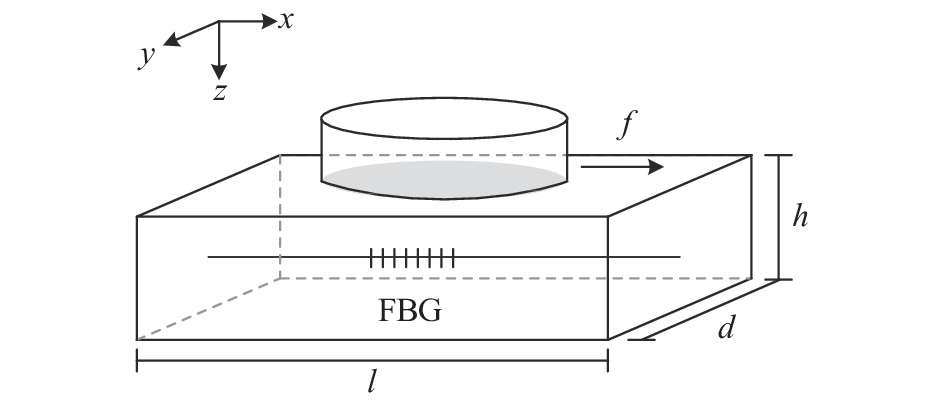
图 1 FBG传感器滑觉示意图
Figure 1. Schematic diagram of FBG sensor slip
-
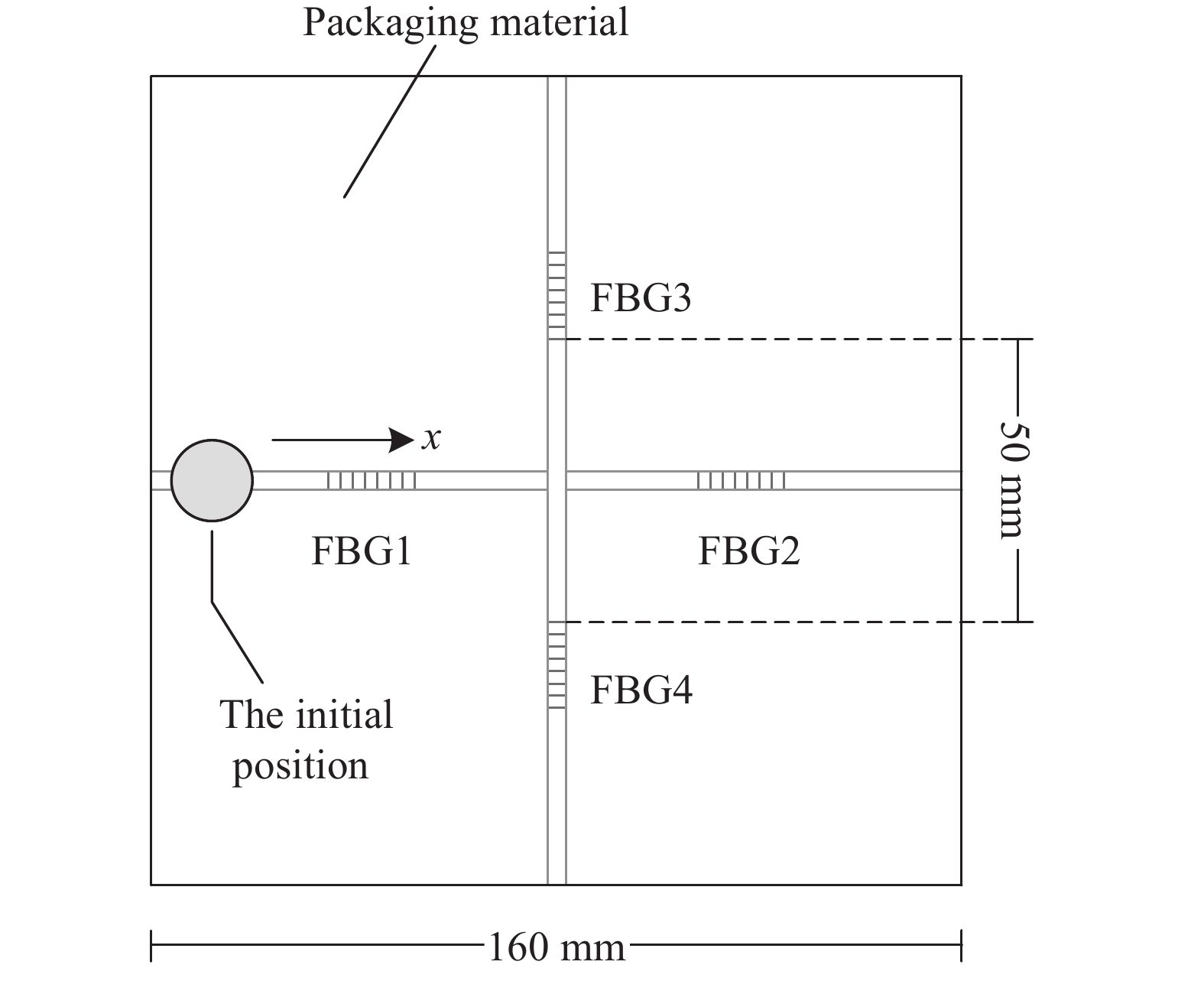
滑动信号的产生需要滑块在保证机械能有效传递至FBG的前提下与之产生相对位移,考虑到光纤光栅结构本身质脆,采用较为成熟的封装技术将其制成柔性单元以提升性能。柔性封装基体选用硅胶材料,成形后密度为1084 kg/m3,杨氏模量为0.012 GPa,泊松比为0.48,传感器结构如图2所示。
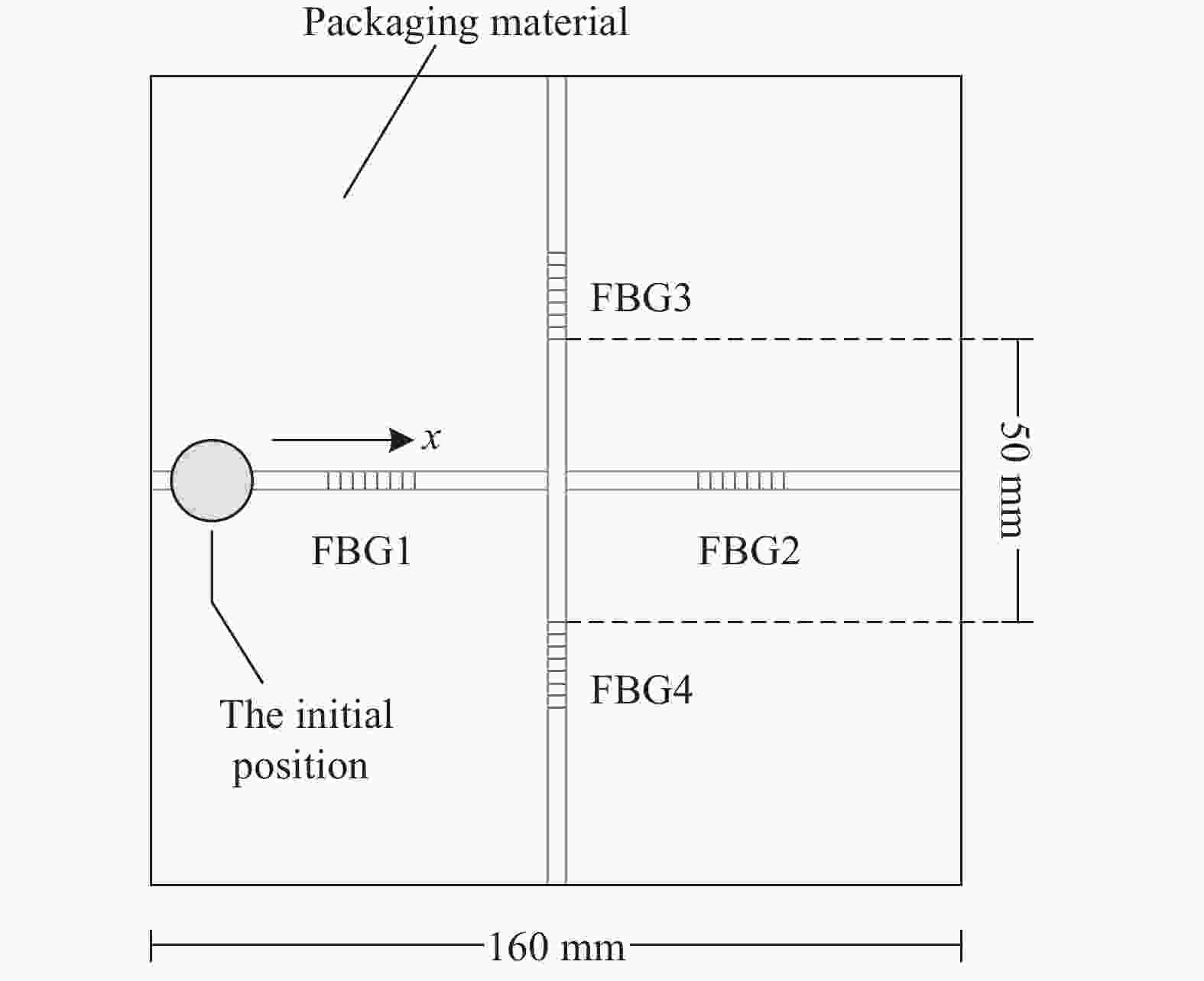
图 2 FBG阵列分布图
Figure 2. FBG array distribution diagram
FBG柔性传感器规格为160 mm×160 mm×5 mm。FBG1~2、FBG3~4分别采用复用技术串联,呈十字交叉布置,并以交汇中心对称。光纤埋深分别为2.5 mm和2.0 mm,栅区长度为10 mm。滑块底面半径为7.1 mm,材料摩擦系数约为0.38。以x为正方向,滑块初始位置为FBG1负向25 mm处。滑觉传感系统如图3所示,滑块由转速可调的直流电机(DC motor)牵引沿x正向匀速滑动,到达激光位移传感器(LDS)监测点后结束,记录起始与结束位置时间。解调仪为MOI公司si155型产品,采样精度为1 pm,频率为1000 Hz,可将采集并解调后的连续光信号输出至上位机。

图 3 分布式FBG传感实验系统
Figure 3. Distributed FBG sensing experimental system
由于FBG中心波长对环境热量敏感,为了避免实验结果与温度变化耦合,实验环境温度为25 ℃,该条件下四组光栅初始波长分别为λ1 =1543.117 nm、λ2 =1548.068 nm、λ3 =1555.969 nm、λ4 =1561.231 nm。
-
光栅波长解调仪所输出的滑觉初始信号如图4所示,其包含大量由环境频率及滑动时的微小连续震动所产生的噪声信号。为了能够准确提取滑动特性相关的特征值,须对初始信号进行去噪处理。经验模态分解(EMD)与小波(Wavelet)去噪作为两种常见的信号处理手段,广泛应用于各类样本模型的预处理中,文中采用该两种方法进行分析比较。

图 4 滑觉信号采集
Figure 4. Slip signal acquisition
EMD是将时域内的原始信号自适应分解为有限项且频率依次降低的本征模函数(IMF),以及一项无法分解的剩余函数(res),IMF函数的生成受模态分解的两个基本条件约束[15]。以上过程可描述为:
$$ s\left(t\right)=\sum _{i=1}^{n}{f}_{i}\left(t\right)+r\left(t\right) $$ 式中:
$ s\left(t\right) $ 为原始信号;$ n $ 为本征模函数项数;$ {f}_{i}\left(t\right) $ 为本征模函数;$ r\left(t\right) $ 为剩余信号。因噪声主要分布于高频域内,所以可将前$ m $ 项IMF去除,并将其他项叠加后得到去噪处理后的信号,可描述为:$$ {s}_{m}=IM{F}_{m+1}+IM{F}_{m+2}+\dots +res $$ 式中:
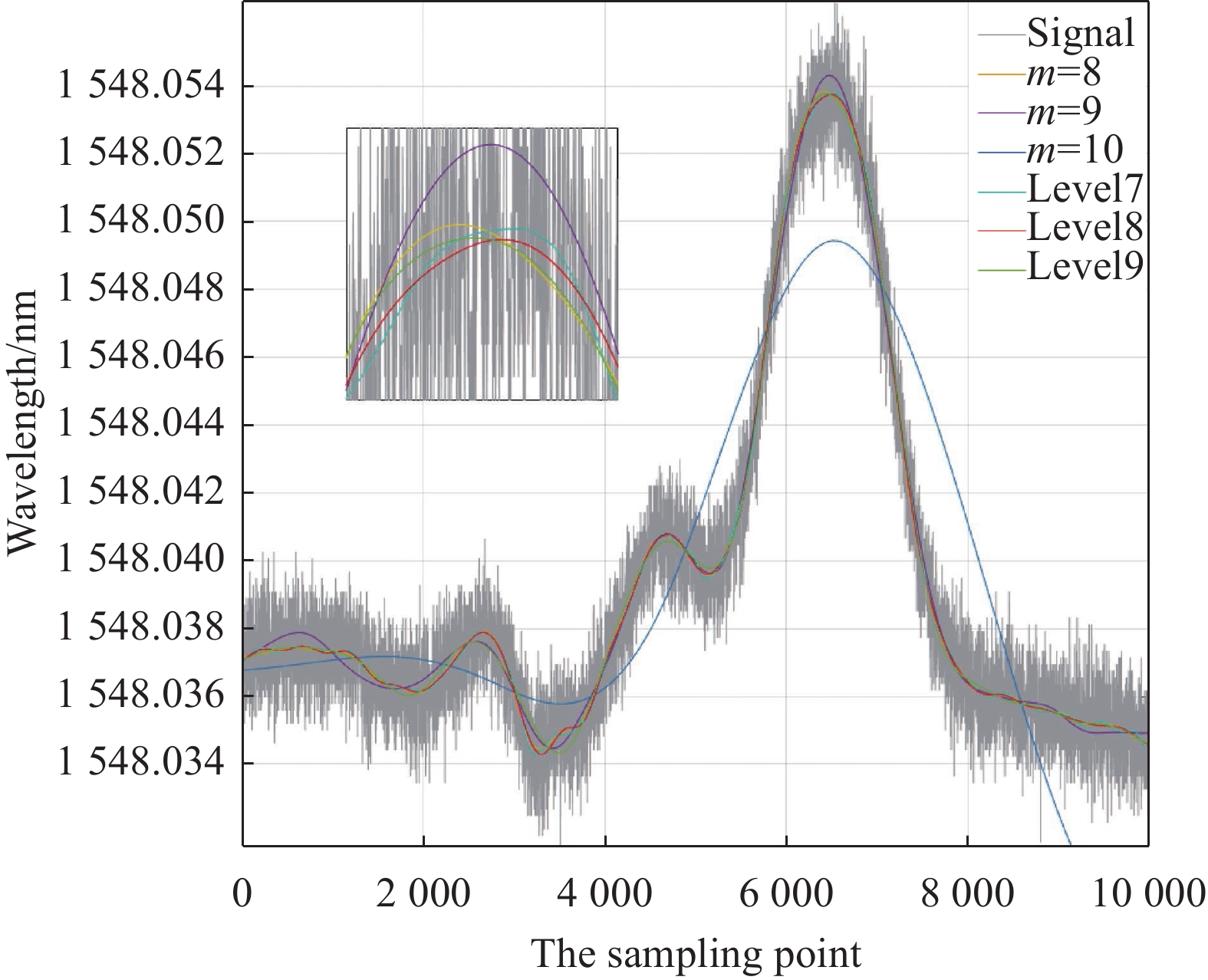
$ 0\leqslant m < n $ 。对于所研究的滑觉信号,EMD将其分为11级IMF和一项剩余基线$ res $ ,取$ m $ 分别为8、9、10进行分析,得到叠加不同项数处理后函数如图5所示,信噪比(SNR)和均方根误差(RMSE)系数如表1所示。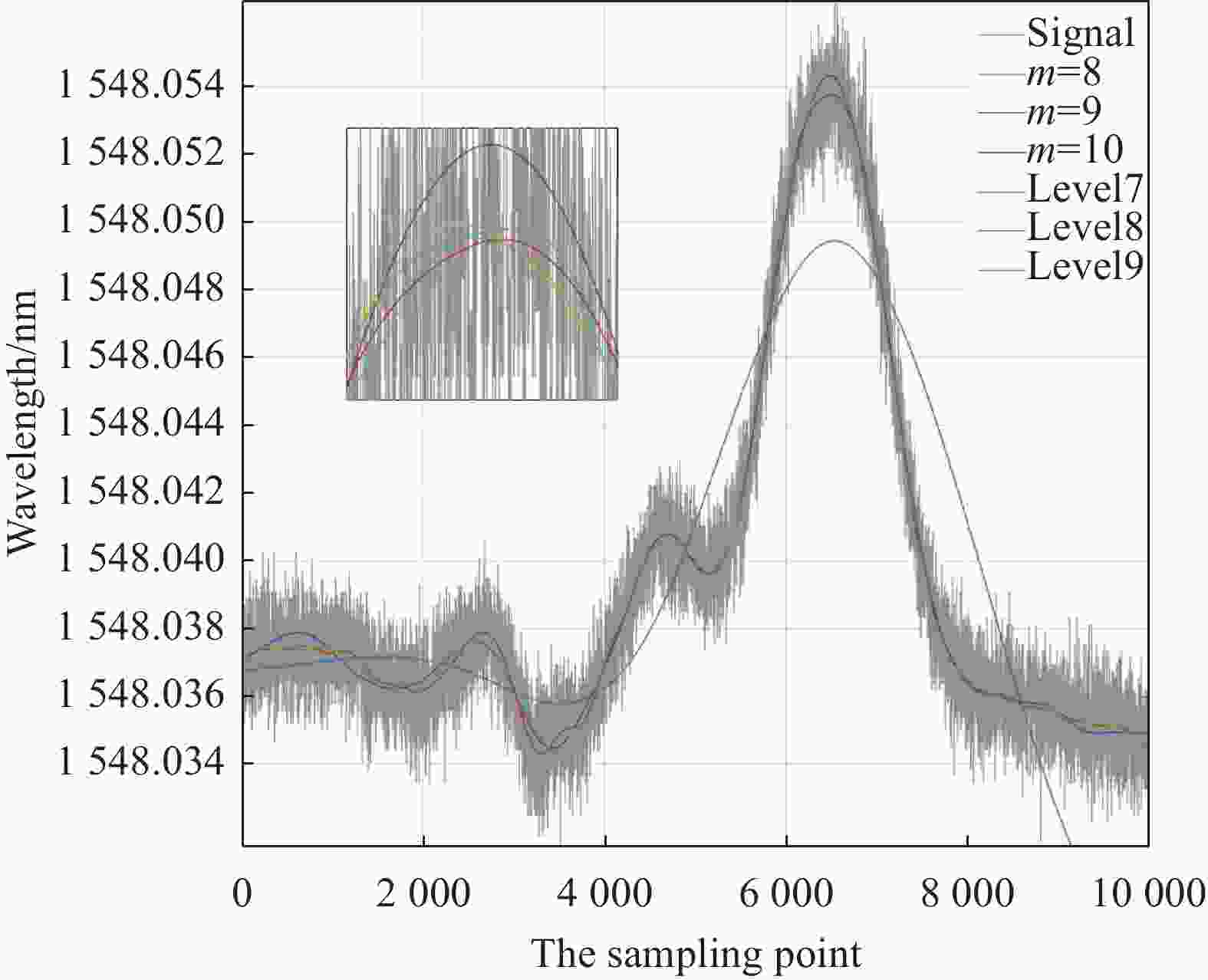
图 5 去噪曲线对比
Figure 5. Comparison of denoising curves
表 1 去噪结果性能评估
Table 1. Performance evaluation of denoising results
Function Parameter SNR RMSE
EMDm=8 16.125 9.606×10−4 m=9 15.853 9.912×10−4 m=10 6.404 2.942×10−3
WaveletLevel7 16.164 9.563×10−4 Level8 16.136 9.594×10−4 Level9 15.982 9.765×10−4 Wavelet是一种通过小波变换与其逆变换,能够保留信号时频域联合特征同时滤除高频噪声的处理方法。对于时域内连续信号,若
$\varPsi \left(t\right)$ 傅里叶变换后满足如下关系:$$ {C}_{\varPsi }=\int \frac{{\widehat{|\varPsi }\left(\omega \right)|}^{2}}{\left|\omega \right|}{\rm{d}}\omega < \infty $$ 则将
$\varPsi \left(t\right)$ 视为一个基本Wavelet,并由此定义以下小波积分变换:$$ \left({W}_{\varPsi }f\right)\left(a,b\right)=\frac{1}{\sqrt{\left|a\right|}}\int f\left(t\right)\overline{\varPsi }\left(\frac{x-b}{a}\right){\rm{d}}t $$ 式中:
$ f\left(t\right) $ 为原始信号;$ a $ 为伸缩系数;$ b $ 为相位变化因子。在该变换中,不同小波函数的选取可能对研究结果产生影响,目前在各工程问题中对该函数的选取仍遵循经验比较法。db10小波基已被相关研究论证[16],其较适用于处理光栅解调仪输出连续的波长信号,所以选用该小波基对初始信号进行分析,分别取7、8、9层分解,重构信号如图5所示,SNR与RMSE系数如表1所示。可以看出,EMD去噪8层时,信噪比和均方根误差表现良好,但极值点偏离较大,将产生显著的特征值误差。小波分解7层时,其SNR和RMSE系数的表现最好,但波形仍有噪点,同样可造成不稳定的特征值误差,而8层分解时,其误差系数与极值点均较为稳定,故将采用Wavelet的db10小波基8层分解对滑动信号进行预处理。
-
对于该柔性传感器,滑觉发生时其分布式FBG各中心波长偏移峰值可反映滑动过程。峰值的产生时间表示滑动轨迹已到达距该FBG位置最近的时刻,而该时刻距滑动开始的时间与该次滑动速度相关,且中心波长峰值的大小与滑块对传感器的压力载荷相关,据此可对滑觉运动的速度和载荷两个关键参数进行预测识别。
图6为一次沿FBG传感器x轴正向滑动去噪后的波长偏移曲线,分别取FBG1~4波长曲线峰值与滑动前波长值之差为波长变化量Δλ1、Δλ2、Δλ3、Δλ4以及各峰值时刻与滑动时刻之差为时间变化量ΔT1、ΔT2、ΔT3、ΔT4作为滑觉特征值构成预测模型输入层,即:
$$ \left\{\mathrm{\Delta }{\lambda }_{i}={\lambda }_{i}-{\lambda }_{0}|\mathrm{\Delta }{T}_{i}={T}_{i}-{T}_{0}\right\},\;\; i=\mathrm{1,2},\mathrm{3,4} $$ 式中:
$ {\lambda }_{0} $ 、$ {T}_{0} $ 为各FBG滑动前初始波长值与滑动时刻;$ {\lambda }_{i} $ 、$ {T}_{i} $ 为各波长峰值与对应时刻。
图 6 滑觉信号特征值划分
Figure 6. Characteristic value division of slip signal
图7(a)、7(b)反映了滑块以不同载荷和速度在柔性传感器表面以正方向进行匀速滑动时,对FBG1、FBG2造成的波长偏移曲线的变化规律,其中载荷步长为0.05 N,速度步长为1 mm/s。

图 7 波长曲线随速度和载荷变化比较
Figure 7. Comparison of wavelength curves corresponding to velocity and load changes
可以看出,当滑动过程的速度、载荷发生改变时,其波长偏移曲线对应的上述各滑觉特征值随之改变,说明在一定参量区间内传感器对这两种特征量的变化响应良好,具有较为线性的变化规律。因此,可设置滑觉的不同速度与载荷分度值并对相应的特征值进行提取,建立样本模型对滑觉特性进行预测识别。
-
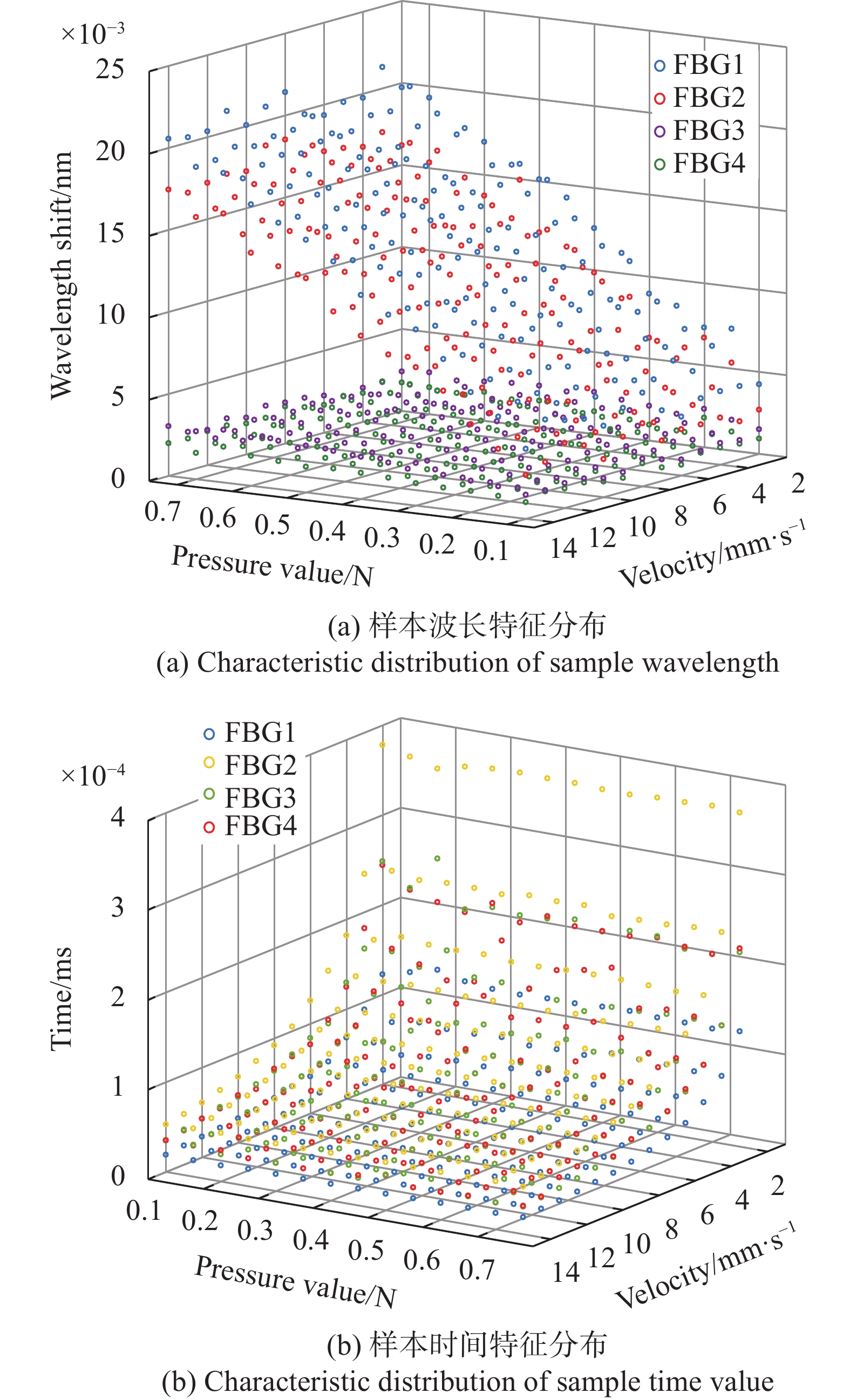
滑觉试验样本集由设置2~14 mm/s、步长为1 mm/s的13个速度分量和0.1~0.75 N、步长为0.05 N的14个载荷分量耦合的多组滑觉信号特征值构成,样本集容量n为182。每个样本包含四个FBG的波长偏移值与时间差值,共八个变量,将样本中波长偏移变量与时间差变量解耦后的分布如图8所示。
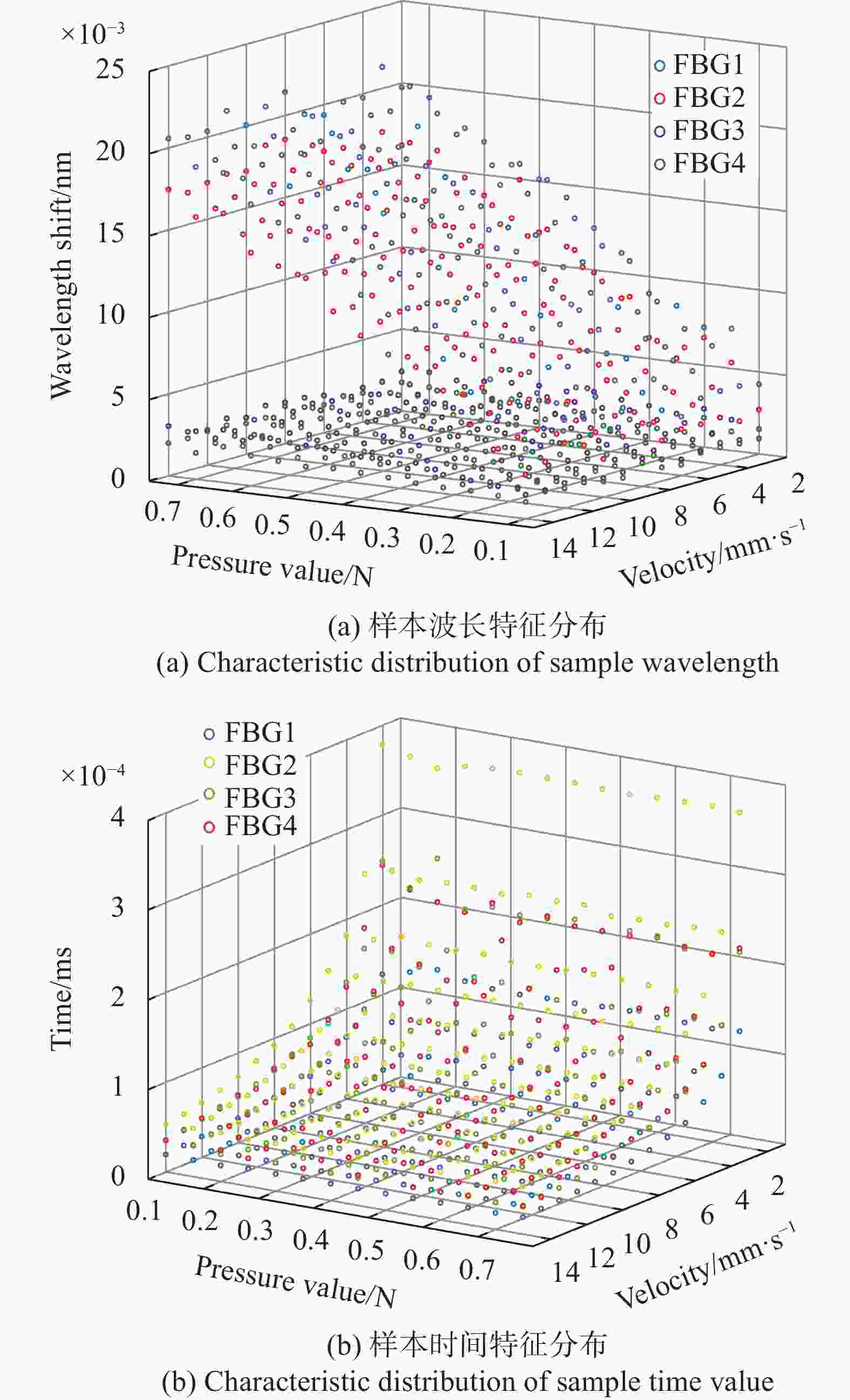
图 8 样本波长和时间特征分布
Figure 8. Characteristic distribution of sample wavelength and time value
由图8可以看出,滑觉原始数据线性度相对统一,但数值的范围分布较广,不同样本中数据的最小值与最大值间有明显差距。该现象不会影响模型最终的预测结果,但会增加模型函数运算的复杂性,占用系统训练时间。
数据归一化可以将样本中各元素的量纲进行统一,使数据不再表示原物理意义,而是将其等尺度缩放,统一映射到同一确定区间内。经过该处理后的样本数据将有效增加模型对其识别分类的速度,具体可表达如下:
$$ \overline{{x}_{i}}=\frac{{x}_{i}-{x}_{{\rm{min}}}}{{x}_{{\rm{max}}}-{x}_{{\rm{min}}}} $$ 式中:
$ {x}_{i} $ 为进行归一化处理的输入数据;$ \stackrel{-}{{x}_{i}}\in \left[\mathrm{0,1}\right] $ ,为经归一化后的输出结果;${x}_{{\rm{max}}}$ 为输入数据同类项变量中的最大值;${x}_{{\rm{min}}}$ 为对应的最小值。归一化仅为对预测模型输入层的优化,并不影响原样本集的分布情况以及训练结果。 -
RF回归算法是将一定数量互不干扰的数据分类树进行随机组合构成决策层的机器学习方法[17],通过对输入层进行多次二分法迭代进行样本预测,滑觉预测模型的构建步骤为:
(1) 滑觉原始经特征提取构成原始样本集N,容量为n,每个样本包含M类特征信息。
(2) 采用Bootstrap装袋法对该样本集进行有放回重复抽样,随机构成k个相互独立且同分布的训练集θi (i=1, 2, 3,···, k),并由此对应产生Ntree=k棵决策树。
(3) 在决策树生长过程中不进行变量剪枝,其新节点的分裂位置遵循二叉决策树生成(CART)法则择优选取,每层节点的分裂变量数受自变量参数Mtry约束。
(4) 输出层的构成为k棵回归树决策值yi (i=1, 2, 3,···, k),最终模型的预测结果y’为输出层数据的平均值。其数学模型可描述为:
$$ y\left(x\right)=\frac{1}{k}\sum _{i=1}^{k}h\left[{f}_{i}\left(x\right),{M}_{{\rm{try}}}\right] $$ 式中:
$ x $ 为输入层样本;$ {f}_{i} $ 为输出结果为$ {\theta }_{i} $ 的抽样函数;$ h $ 为决策树训练函数。其模型结构如图9所示。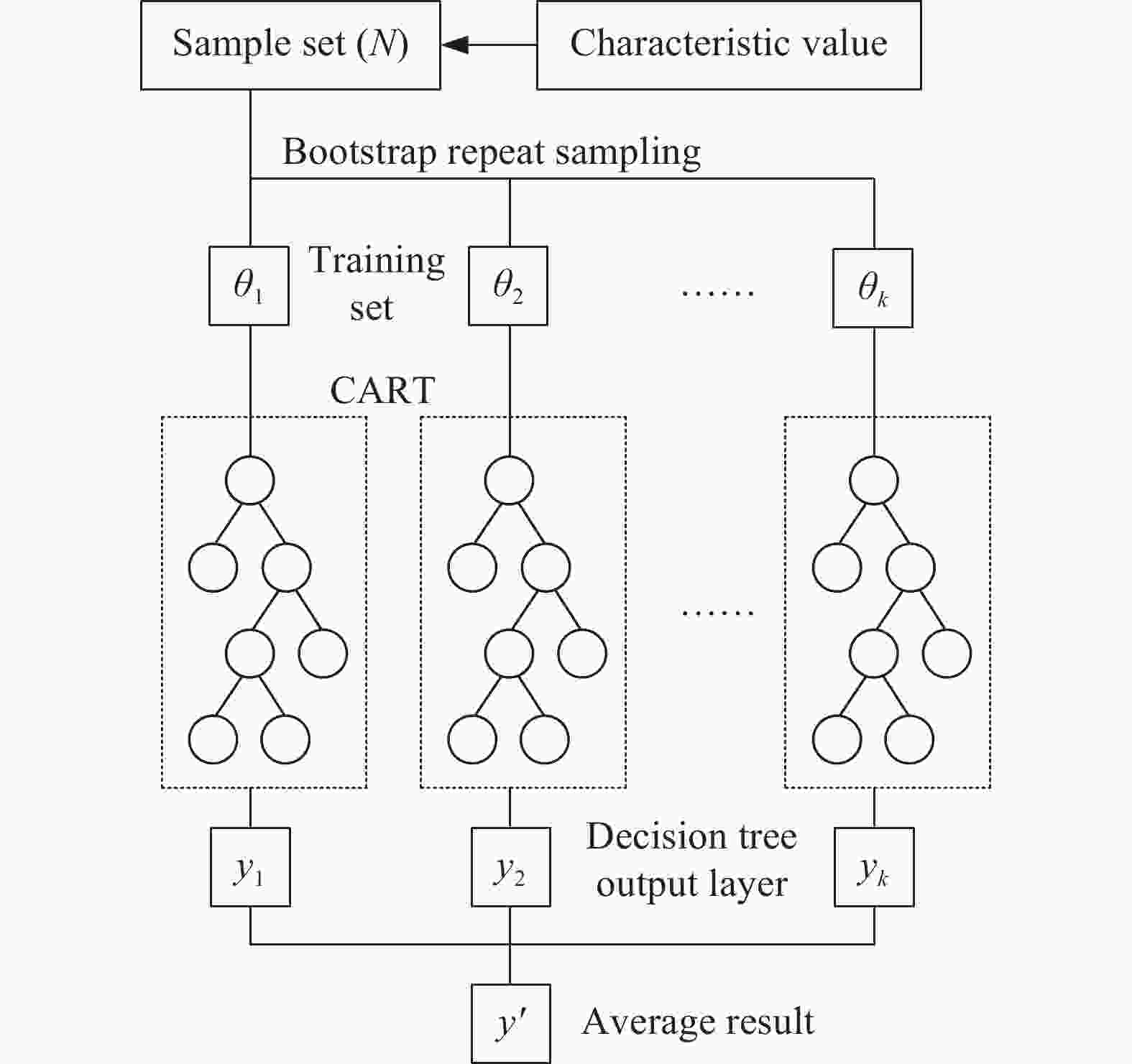
图 9 随机森林结构模型
Figure 9. Structural model of random forest
由RF模型结构可以看出,自定义参数Ntry与Mtry的取值规范了决策层形态,对预测结果具有直接影响。不同的初始样本集,其特征对回归拟合结果的期望不同,对最少决策树量与允许最大分裂变量数的要求也不一。在建立基于RF的滑觉回归模型前,须对这两个参数进行比较。
图10展示了Mtry分别为2、3、4、5时,对应该系统Ntree值的变化对预测集均方误差(MSE)大小的影响。可以看出,不同最大分裂节点变量随决策树量增大造成的预测结果MSE系数都趋于稳定,当Mtry=2时,其对稳定后的模型预测的精度影响相对较小。在决策树量达130后,随着决策树的增加,MSE基本不再变化,所以对于滑觉预测模型,Ntree=130。
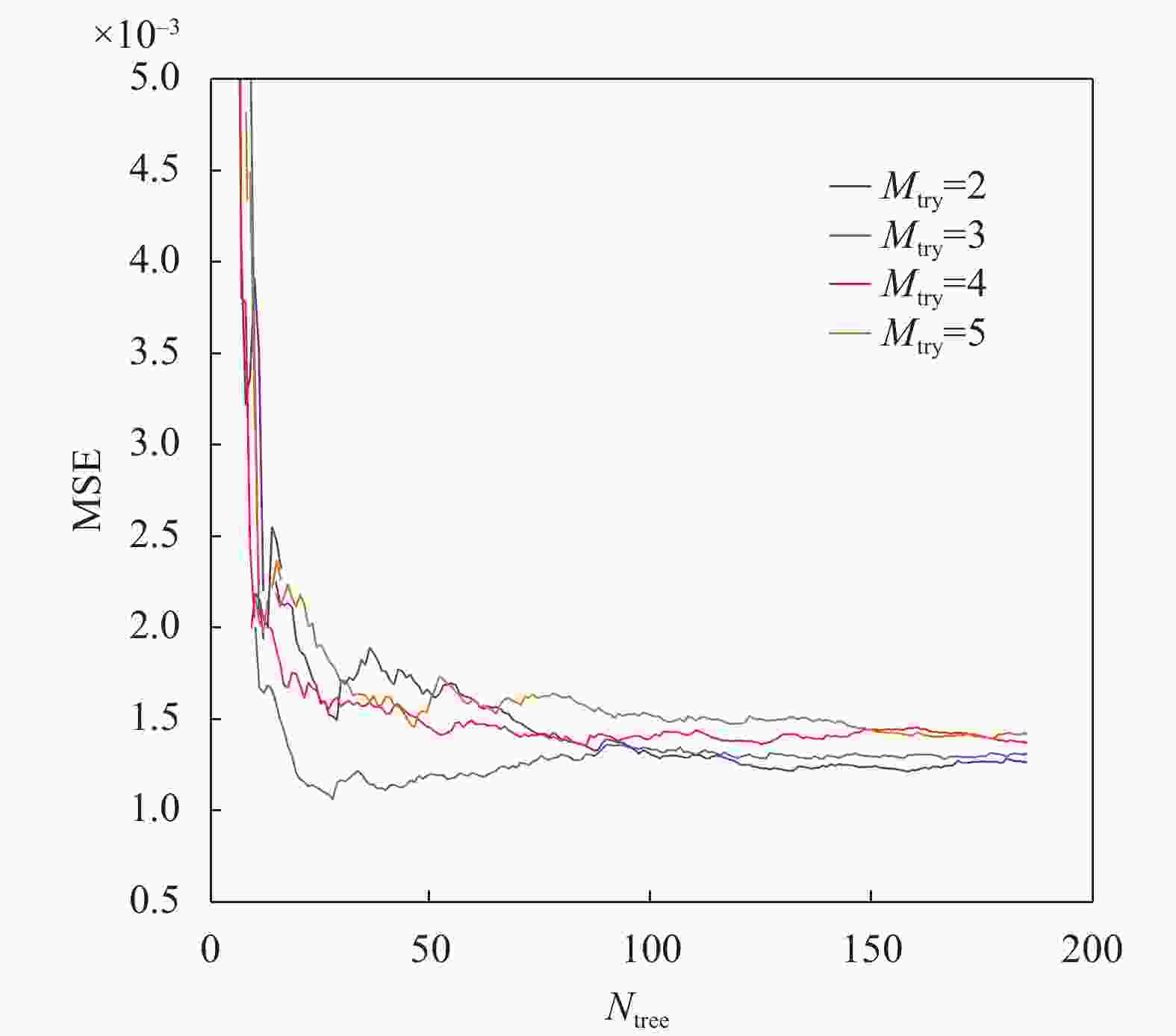
图 10 决策树数量对MSE系数的影响
Figure 10. Influence of decision tree number on MSE coefficient
-
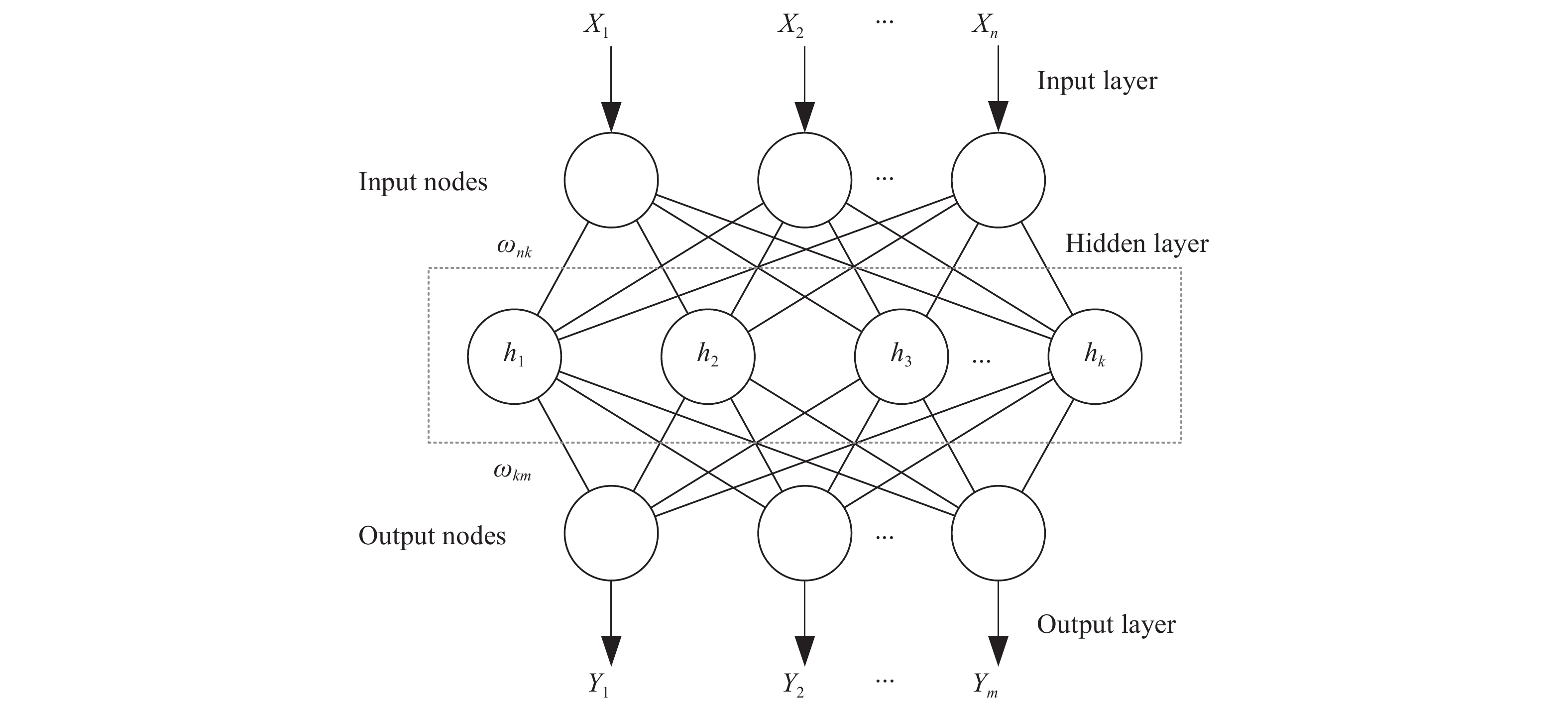
BP神经网络回归因其较好的非线性运算能力而在复杂工程问题中应用广泛,引用该模型作为预测结果参考。BP神经网络中神经元为最基本的逻辑回归单元,每个神经元都与上层输入变量建立连接,将输入层数据判定后的结果传输至下层。单隐含层前馈神经网络的训练逻辑如图11所示。

图 11 神经网络结构模型
Figure 11. Structural model of neural network
该结构中,
${X}_{1},{X}_{2},\cdots,{X}_{n}$ 为样本数值,${h}_{1}, {h}_{2},\cdots, {h}_{k}$ 为隐含层神经元,ωnk为输入节点与隐含层神经元的连接权值,ωkm为隐含层神经元与输出层神经元的连接权值,${Y}_{1},{Y}_{2},\cdots,{Y}_{m}$ 为模型输出结果。对于系统中数据进入任意神经元后再输出的关系,其数学模型可表示为:$$ \widehat{y}=f\left(\sum _{i=1}^{a}{\omega }_{i}{x}_{i}-\theta \right) $$ 式中:ωi为第i条传输路径的权值;
$ {x}_{i} $ 为该路径对神经元的输出;a为神经元所接受传输路径数量;θ为该神经元的阈值;$ f $ 为神经元激活函数(Activation function)。滑觉样本特征值通过输入节点进入BP网络后,数据经两次传播到达输出层,系统可将输出层的误差沿传播路径逆向运算,对每层神经元的连接权值和阈值进行调整并再次传播,直至输出值的均方误差到达终止条件,将模型预测结果进行输出。激活函数的引入有效增加了网络的非线性处理能力,其反映了系统输入层与输出层之间的函数变换。激活函数的选取可能对特定模型的预测结果产生不同的影响,针对滑觉样本采用四种神经网络激活函数性能评估如表2所示。
表 2 不同激活函数对系统的影响
Table 2. Influence of activation functions on the system
Activation function Error R2 RMSE Identity 12.11% 0.811 1.715 Sigmoid 4.48% 0.967 0.650 Tanh 5.76% 0.942 0.888 ReLU 8.79% 0.886 1.516 其中,Sigmoid函数在BP网络中应用最为广泛,且对样本的预测中有最小的均方根误差0.650及最大的R2系数0.967;tanh函数为Sigmoid的改进函数,同样具有可观的预测性能;Identity函数与ReLU函数的误差表现均偏高,可以看出其不适用于该模型对滑觉样本的处理。
除系统权值与阈值外,神经元数量也直接影响模型预测性能。若该项数量较少,给予样本进行非线性分类的空间有限,将造成较大系统误差;若数量过多,不仅占用运算资源,且对样本中的干扰规律进行累积,降低本征比例。神经元数量对模型预测结果的影响如图12所示。
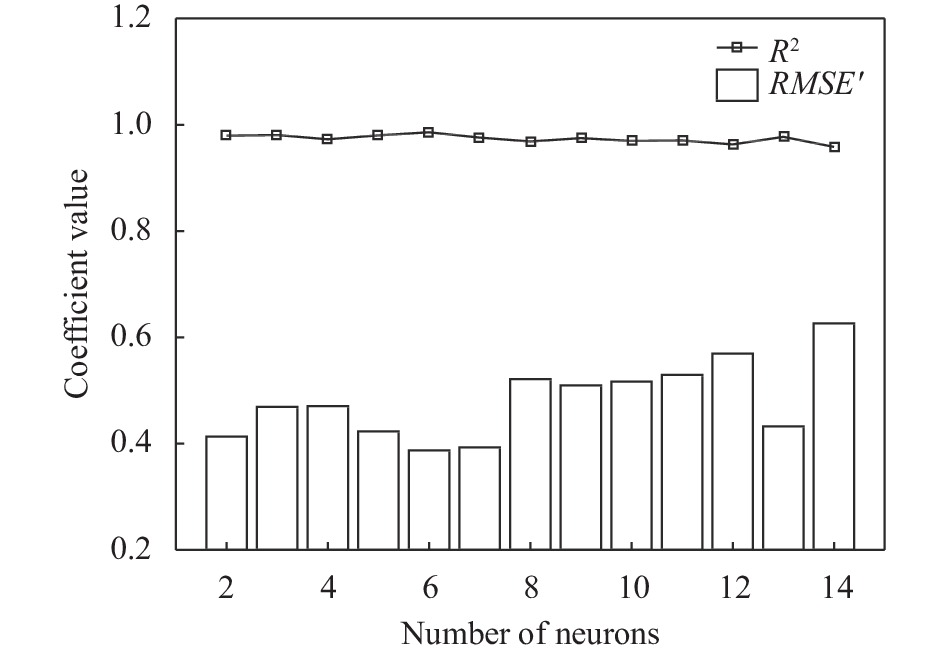
图 12 神经元数量对预测性能的影响
Figure 12. Effect of neuron number on prediction performance
图12中,为方便系数比较,
$RMS{E}^{\text{'}}= \mathit{{\rm{lo}}}{{\rm{g}}}_{10}\left(RMSE\right)$ 。可以看出,当神经元数量为5时,训练结果有较高的R2系数与最低的RMSE系数表现。当神经元数量增加时,R2值并无明显变化,但RMSE有不断增大趋势,说明随着神经元增加,系统误差也不断累积,因此可选择神经元数量参数为5。 -
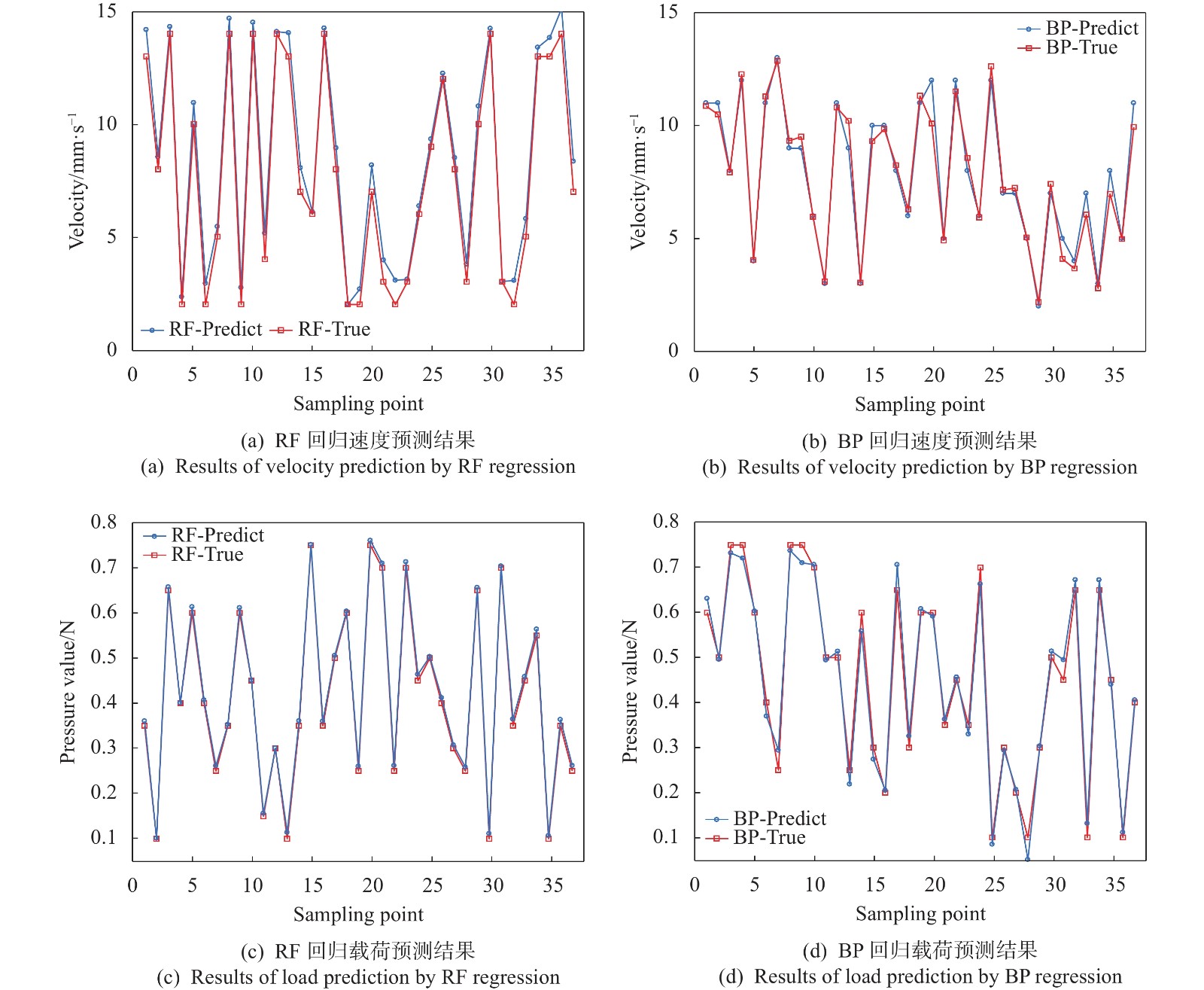
采用RF随机森林回归与BP神经网络回归两种模型对滑觉实验样本集进行训练,训练占比为0.8,测试集样本数为37,分别对滑动速度和载荷两个特性进行预测,输出结果如图13所示。
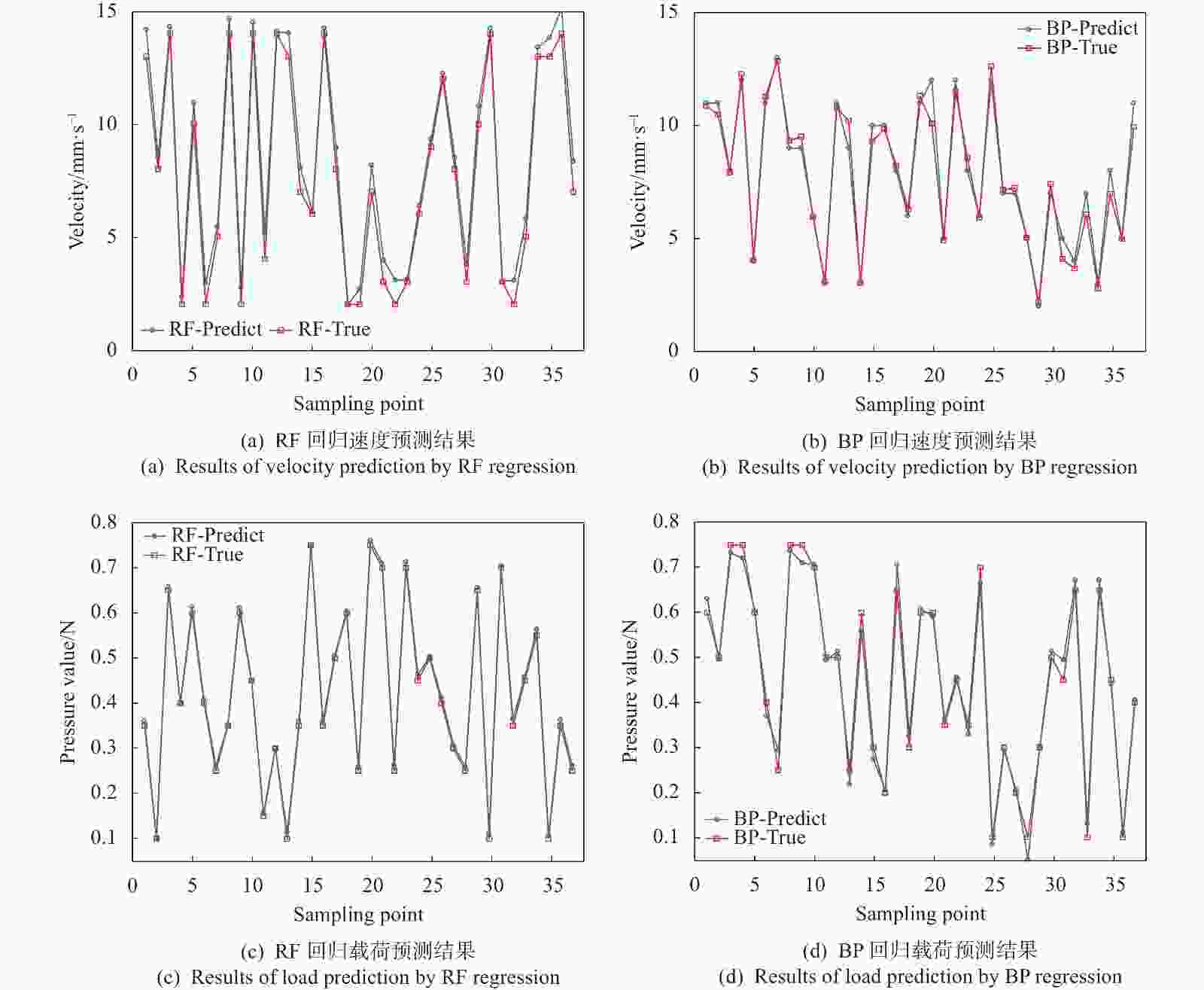
图 13 RF与BP回归对速度和载荷预测结果
Figure 13. Results of velocity and load predictions by RF and BP regression
可以看出,两种回归模型对实验样本均有可观的预测表现。滑觉速度预测中,BP回归预测集R2系数为0.9652,RF回归预测集R2系数为0.9724,平均误差百分比均不超过5.8%。滑觉载荷预测中,BP回归预测集R2系数为0.9847,RF回归预测集R2系数为0.9975,平均误差百分比均不超过3.3%。
由于训练集的样本抽取具有随机性,为进一步精确比较两种模型的性能差异,分别对样本进行20次重复预测,取平均进行最大误差绝对值(Emax)、平均误差(Error)百分比、R2和RMSE系数等指标分析,结果如表3所示。
表 3 两种模型预测性能比较
Table 3. Performance evaluation of the two models
Physical quantity Evaluation criteria BP RF
Velocity
/mm·s–1Emax 1.8722 1.3408 Error 4.31% 5.22% R2 0.9681 0.9746 RMSE 0.6683 0.7287
Pressure
/NEmax 0.0684 0.0142 Error 3.02% 1.12% R2 0.9835 0.9982 RMSE 2.4414 0.8558 可以看出,在速度预测方面,两种模型的预测性能差距不明显,RF回归R2系数表现略好,但BP回归平均误差值更低、散布范围更小。载荷预测方面,RF回归各系数表现明显好于BP回归,最大误差较之减少0.0542 N,平均误差减少1.9%,RMSE系数降低了1.5856,说明随机森林算法对预测滑觉载荷特性的数据规律预测更具有优势。
-
文中提出了一种针对分布式FBG柔性传感器表面滑觉的检测识别方法,通过引入人工回归模型可实现对不同滑动条件下滑觉样本滑动速度与载荷两种特性的有效预测,对智能仿生皮肤领域进行滑觉信号分析研究提供一定价值。工作中,针对滑觉初始信号的预处理问题比较了两种常用波析函数,结果指出小波函数较EMD函数更有利于特征值保真,平均信噪比系数高出0.322。选取四支FBG波长偏移曲线峰值的八组特征值进行滑觉样本构建,并引入RF回归模型进行样本训练,将BP回归模型的训练作为预测结果参考,同时两种回归算法的自定义参数进行样本适应优化。实验结果表明,在滑觉速度预测方面,两种模型差距不大,RF回归平均误差为0.5174 mm/s,BP回归平均误差为0.626 mm/s;滑觉载荷预测方面,RF回归较BP回归表现更好,平均误差减小0.0124 N,均方根误差减小1.5856,R2系数达0.9982,基本实现对滑觉特性的准确识别。
在传感器设计方面,后续可增加FBG数量且改进排布方式以增加系统的复杂性,增大该方法的识别面及应用拓展。文中仅以波长偏移的峰值进行特征值选取,可继续比较分析FBG波长变化特点,增加特征值规划范围。实验方法上,可设计非线性滑觉路径增设识别维度。训练模型方面,后续可对随机森林及神经网络增加优化算法,或选取其他模型进入参考系对比。
Identification of characteristics of slip signal based on fiber Bragg grating flexible sensor
-
摘要: 针对目前为智能仿生体柔性皮肤领域提供支持的光纤布拉格光栅传感器研究对滑觉信号特性识别手段的不足,提出了一种通过人工学习网络对基于分布式光栅传感单元所检测的滑觉速度与滑觉载荷进行预测的方法。设计了由四支光栅构成的传感阵列,采用封装技术制成柔性传感器,并搭建实验平台对滑觉信号进行采集。给出了滑觉过程对布拉格光栅波长偏移曲线的作用原理,对经验模态分解与小波分析的去噪效果进行比较,信噪比分别达到15.99与16.15。搭建了滑觉实验系统,对采集的不同速度与载荷分度的滑觉信号的特征值设定提取标准,构建滑觉样本集,引入随机森林与神经网络两个回归模型进行训练,并对比了预测效果。实验结果指出,速度特性预测中,两种模型的R2系数分别为0.9746和0.9681,平均误差分别为5.22%和4.31%;载荷特性预测中,两种模型的R2系数分别为0.9982和0.9835,平均误差分别为1.12%和3.02%。该研究方法基本实现了对滑觉样本两种特征的准确识别,在柔性仿生皮肤传感领域对滑觉信号的研究具有一定价值。Abstract:
Objective The realization mode of robot is developing towards intelligence. In the unstructured environment, bionics need to make self-adaptive decisions on the contact physical quantities (mostly dynamic and continuously changing sliding processes) in the environment. The sliding sensor is the main means for the artificial bionics to realize the perception of the changes in the external physical quantities and make the controller conduct body feedback. Fiber Bragg Grating (FBG) sensor encapsulated by silica gel has the characteristics of high sensitivity, small size, strong anti-electromagnetic interference ability, and is an ideal model for bionic skin. At present, the relevant research at home and abroad has designed FBG flexible sensors with different numbers and array distributions, but the degree of research is still limited, and the analysis of the basic characteristics of the signal at the phenomenal level lacks the necessary quantitative support. In the aspect of feature recognition and analysis of tactile signals, even though some studies have used artificial learning networks to identify or decouple the position, load and other characteristics of tactile signals, the research level is still in the static signal of tactile sensing, and there is a lack of attempts on dynamic and continuous sliding, resulting in deficiencies in the research direction of sliding signal feature recognition. Therefore, this work designs a distributed sensor system based on FBG using PDMS material packaging, and proposes a method to predict the sliding speed and sliding load detected by the distributed grating sensor unit through artificial learning network. Methods The sensor array is composed of four gratings (Fig.2), and is packaged into a flexible sensor. An experimental platform is built to collect the slip signal (Fig.3). The principle of FBG wavelength shift during sliding is studied. The sliding signal is compared by EMD decomposition and wavelet analysis, and the signal-to-noise ratio is 15.99 and 16.15, respectively (Tab.1). Set up the sliding experiment system, set the extraction criteria for the sliding signal characteristic values of different speed and load scales (Fig.6), build the sliding sample set, introduce two regression models of random forest and neural network to train and predict the effect. Results and Discussions The wavelet function is more conducive to the fidelity of the eigenvalues than the EMD function. The average signal-to-noise ratio coefficient is 0.322 higher. The signal-to-noise ratio and the root-mean-square error of the EMD denoising 8 layers perform well, but the extreme point deviation is large. The SNR and RMSE coefficients perform best when the wavelet decomposition 7 layers, but the waveform still has noise, while the error coefficient and the extreme point of the EMD denoising 8 layers are relatively stable; The magnitude of the FBG center wavelength peak value is related to the pressure load and sliding speed of the slider on the sensor. When the sliding speed and load change, the center wavelength offset curve changes with the sliding characteristic value. In a certain parameter range, the sensor responds well to the change of these two characteristic values and has a relatively linear change rule (Fig.7); The difference between RF and BP regression algorithms in slip speed prediction is not large. RF regression performs better than BP regression in slip load prediction, and basically realizes accurate recognition of slip characteristics (Fig.13). Conclusions The experimental results show that the R2 coefficients of the two models are 0.9746 and 0.9681, respectively, and the average error is 5.22% and 4.31%, respectively; In the load characteristic prediction, the R2 coefficients of the two models are 0.9982 and 0.9835, respectively, and the average error is 1.12% and 3.02%, respectively (Tab.3). In the work, a detection and recognition method for the surface slip of distributed FBG flexible sensor is proposed. Through the introduction of artificial regression model, the two characteristics of sliding speed and load of sliding samples under different sliding conditions can be effectively predicted. This research method basically realizes the accurate recognition of the two characteristics of sliding samples, and has certain value in the research of sliding signal in the field of flexible bionic skin sensing. -
图 7 波长曲线随速度和载荷变化比较
Figure 7. Comparison of wavelength curves corresponding to velocity and load changes
图 8 样本波长和时间特征分布
Figure 8. Characteristic distribution of sample wavelength and time value
图 13 RF与BP回归对速度和载荷预测结果
Figure 13. Results of velocity and load predictions by RF and BP regression
表 1 去噪结果性能评估
Table 1. Performance evaluation of denoising results
Function Parameter SNR RMSE
EMDm=8 16.125 9.606×10−4 m=9 15.853 9.912×10−4 m=10 6.404 2.942×10−3
WaveletLevel7 16.164 9.563×10−4 Level8 16.136 9.594×10−4 Level9 15.982 9.765×10−4  下载: 导出CSV
下载: 导出CSV
表 2 不同激活函数对系统的影响
Table 2. Influence of activation functions on the system
Activation function Error R2 RMSE Identity 12.11% 0.811 1.715 Sigmoid 4.48% 0.967 0.650 Tanh 5.76% 0.942 0.888 ReLU 8.79% 0.886 1.516
下载: 导出CSV
表 3 两种模型预测性能比较
Table 3. Performance evaluation of the two models
Physical quantity Evaluation criteria BP RF
Velocity
/mm·s–1Emax 1.8722 1.3408 Error 4.31% 5.22% R2 0.9681 0.9746 RMSE 0.6683 0.7287
Pressure
/NEmax 0.0684 0.0142 Error 3.02% 1.12% R2 0.9835 0.9982 RMSE 2.4414 0.8558
下载: 导出CSV
-
[1] Feng J, Jiang Q. Slip and roughness detection of robotic fingertip based on FBG [J]. Sensors and Actuators A: Physical, 2019, 287: 143-149. doi: 10.1016/j.sna.2019.01.018 [2] Pang Y, Xu X, Chen S, et al. Skin-inspired textile-based tactile sensors enable multifunctional sensing of wearables and soft robots [J]. Nano Energy, 2022, 96: 107137. doi: 10.1016/j.nanoen.2022.107137 [3] Li Tiejun, Liu Yingxin, Liu Jinyue, et al. Real-time perception of operational intention based on arrayed tactile sensors [J]. Chinese Journal of Scientific Instrument, 2020, 41(1): 100-112. (in Chinese) [4] Jung Y D, Lee D G, Park J, et al. Piezoresistive tactile sensor discriminating multidirectional forces [J]. Sensors, 2015, 15(10): 25463-25473. doi: 10.3390/s151025463 [5] Xie S, Zhang Y, Jin M, et al. High sensitivity and wide range soft magnetic tactile sensor based on electro- magnetic induction [J]. IEEE Sensors Journal, 2021, 21(3): 2757-2766. doi: 10.1109/JSEN.2020.3025830 [6] Gong S, Zhang J, Wang C, et al. A monocharged electret nanogenerator-based self-powered device for pressure and tactile sensor applications [J]. Advanced Functional Materials, 2019, 29(41): 1807618. [7] Abro Z A, Hong C, Zhang Y, et al. Development of FBG pressure sensors using FDM technique for monitoring sleeping postures [J]. Sensors and Actuators A: Physical, 2021, 331: 112921. doi: 10.1016/j.sna.2021.112921 [8] Di S R. Fiber optic sensors for structural healt monitoring of aircraft composite structures: recent advances and applications [J]. Sensors, 2015, 15(8): 18666-18713. doi: 10.3390/s150818666 [9] Presti D L, Massaroni C, D’Abbraccio J, et al. Wearable system based on flexible FBG for respiratory and cardiac monitoring [J]. IEEE Sensors Journal, 2019, 19(17): 7391-7398. doi: 10.1109/JSEN.2019.2916320 [10] Suresh R, Tjin S C, Ngo N Q. Shear force sensing by strain transformation using non-rectilinearly embedded fiber Bragg grating [J]. Sensors and Actuators A: Physical, 2004, 116(1): 107-118. doi: 10.1016/j.sna.2004.04.001 [11] Qian Muyun, Qi Yu, Wei Xinyuan. Research on decoupling of fiber Bragg grating tactile signal based on neural network [J]. Chinese Journal of Scientific Instrument, 2021, 41(8): 44-51. (in Chinese) [12] Feng Yan, Wang Feiwen, Zhang Hua, et al. Slip sensing unit using optical fiber Bragg grating [J]. Acta Photonica Sinica, 2019, 48(9): 0906001. (in Chinese) [13] Sun S, He S, Han Yu, et al. Soft bionic skin with touch -slip and thermal perception using double-layer distributed FBG sensing array [J]. IEEE Sensors Journal, 2022, 22(5): 4096-4105. doi: 10.1109/JSEN.2022.3143945 [14] Wang Yachun, Zhang Xiaodong, Lu Zhufeng, et al. Research on the tactile force sensor of prosthetic hand finger based on fiber Bragg grating [J]. Chinese Journal of Scientific Instrument, 2021, 42(9): 124-130. (in Chinese) [15] Wang Xiangfeng, Huang Genghua, Zhang Zhijie, et al. Noise reduction based on empirical mode decomposition for full waveforms data of GaoFen-7 laser altimetry [J]. Infrared and Laser Engineering, 2020, 49(11): 20200261. (in Chinese) [16] Ge Ziyang, Wang Yan, Zhao Hui, et al. Characteristics of flexible fibre Bragg grating pulse wave sensor [J]. Acta Photonica Sinica, 2021, 50(12): 1206002. (in Chinese) [17] Fang Xinrui, Wen Zhaofei, Chen Jilong, et al. Remote sensing estimation of suspended sediment concentration based on random forest regression model [J]. Journal of Remote Sensing, 2019, 23(4): 756-772. (in Chinese) -

 点击查看大图
点击查看大图

计量
- 文章访问数: 130
- HTML全文浏览量: 27
- PDF下载量: 24
- 被引次数: 0




























































