










-
地球同步轨道(Geosynchronous Orbit, GEO)是太空中的战略要地,运行着通信卫星、数据中继卫星、电子侦察卫星、导弹预警卫星以及气象卫星,高价值目标的密集分布使得高轨成为了太空战场的“马六甲海峡”[1]。随着航天任务范围的不断扩大,对高轨卫星的应用朝着天基态势感知[2]、非合作目标特性获取[3]、在轨操控控制[4]、交会与接近[5]等新型航天任务扩展,GEO区域逐渐成为各国关注的焦点,相关技术也成为国际竞争的前沿。
为控制该战略要地、确保自身太空优势,美军在其军事战略、先进技术和财力支持下,部署了大量空间攻防装备[6]。2006年6月美国以一箭双星的方式发射了卫星技术试验卫星(MiTEx)[7],运行在准地球同步轨道,进行GEO目标近距离成像技术验证。在MiTEx卫星技术基础上,美国空军提出了“地球同步轨道空间态势感知计划”(Geosynchronous Space Situational Awareness Program,简称GSSAP),通过对高价值目标的严密跟踪与监视,掌握每颗卫星的任务功能、构型配置、性能指标、活动规律等信息,并了解意图、过程和效果,以强化太空态势的单向透明优势[8]。
纵观公开文献,国内学者从多个方面对GSSAP卫星进行了研究分析,刁华飞等人[9]首次归纳总结了GSSAP卫星的平台情况、轨道情况及卫星的任务操控,并仿真分析了观测距离、观测角度对其成像能力的影响;宋瑞等人[10]通过对GSSAP系列卫星的能力进行分析,总结出高轨巡视卫星的能力现状和规律性行为;肖余之等人[11]结合高轨目标的轨道特性和光照特性,开展了高轨目标顺光成像的机动控制、告警相机视场精准配置、目标三维重建以及实践情况等研究;王典军等人[12]基于GSSAP的历史轨道数据和典型观测事件,分析并研判了GSSAP卫星的总体设计和在轨运行模式,提炼出漂移巡视、机动巡视和抵近等在轨运行策略,并通过仿真分析比较了不同工况下的效能。上述学者在GSSAP卫星总体设计、工作模式、轨道特性等方面的研究取得了一定的进展,有效促进了我国天基空间态势感知技术的发展。但针对GSSAP历史轨道数据所蕴含的情报信息挖掘力度不够,缺乏GSSAP卫星在轨应用的深度分析,对GSSAP成像能力的研究较为粗浅,没有结合实际星历数据深入分析。
文中对GSSAP卫星的发展历程、平台情况、轨道特性、任务操控、总体指标进行了研判分析,深入研究了卫星的历史星历数据,分析并统计了潜在的在轨应用案例;开展了卫星在抵近目标过程中的动态光学成像仿真实验,模拟了不同观测距离、不同太阳相位角对成像效果的影响,相关研究对开展高轨卫星平台威胁自主感知、主被动自卫防护、空间博弈对抗、在轨维护与监视等任务具有重要的价值和意义。
-
GSSAP (见图1)是美国空军最新的空间态势感知卫星,具备GEO轨道持续监视和抵近详查能力,星上搭载高分辨率光学相机和高性能电子侦察设备,可对目标进行“拍照”和“窃听”,图像分辨率达到厘米级,可看清目标天线、传感器等细节信息;同时也能够窃听目标发射的无线电信号,用于目标卫星身份识别和行为活动判断的指标。
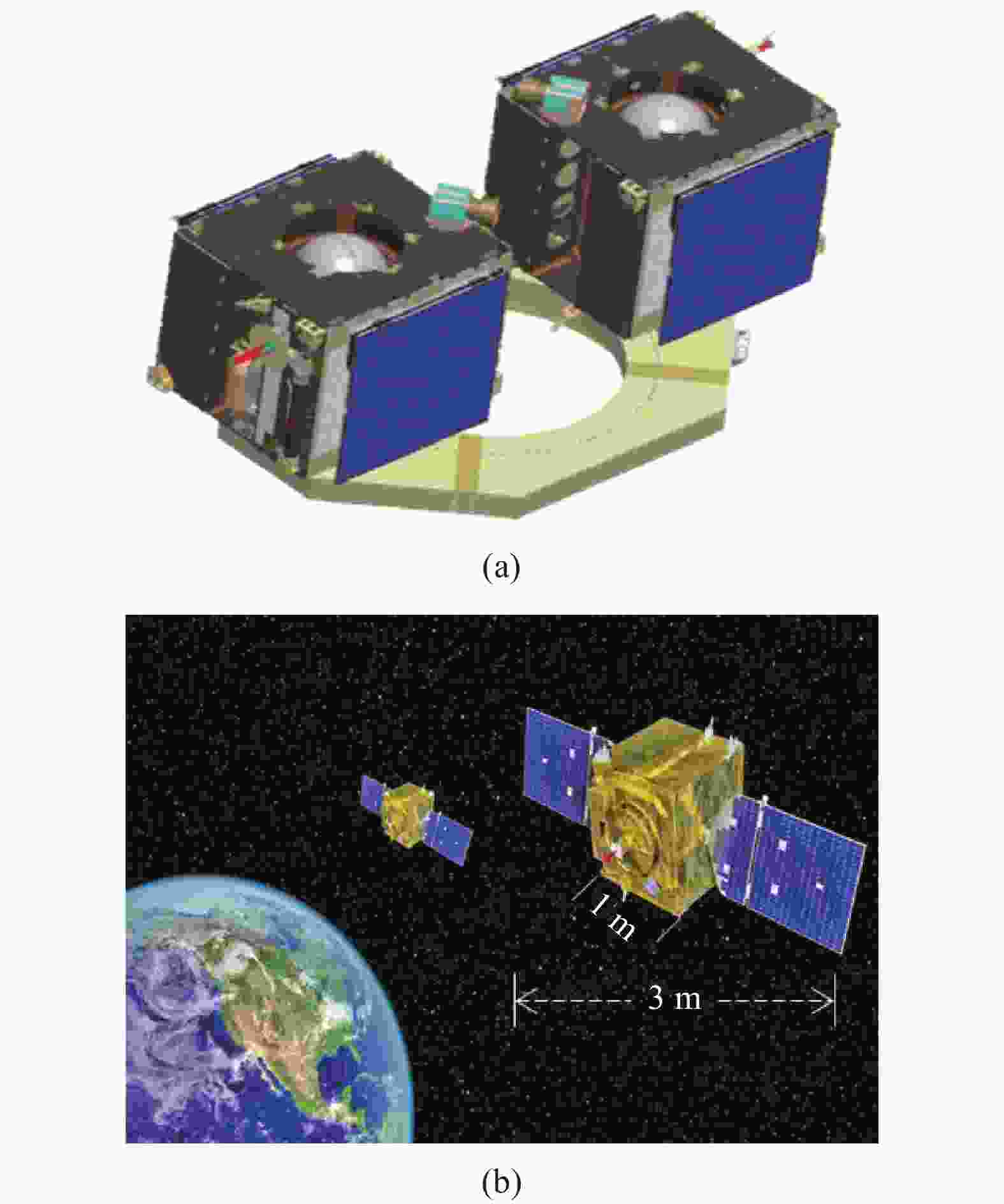
图 1 (a) GSSAP一箭双星运载布局示意图;(b) GSSAP卫星在轨运行示意图
Figure 1. (a) Diagram of GSSAP satellite carrier layout; (b) GSSAP satellite in orbit
据公开资料显示,目前已经部署6颗GSSAP卫星(见表1),运行在GEO±50 km附近,通过双星/多星的组网运行,具备网络化、体系化的协同作战能力,使美国高轨空间目标的探测和识别能力得到进一步提升。GSSAP-1/2于2014年7月28日发射,2015年9月具备初始作战能力;GSSAP-3/4于2016年8月19日发射,2017年9月具备初始作战能力;GSSAP-5/6于2022年1月21日发射,比原计划推迟两年,推测在技术上进行了重大升级改进,尤其是对成像探测系统的改进,解决了传统光学成像对逆光目标无法有效探测的能力缺陷,同时基于新技术体制实现了有效载荷的轻小型工程化。
表 1 GSSAP卫星基本信息
Table 1. GSSAP satellites basic information
Satellite COSPAR ID Name Launch date Platform Carrier rocket Current orbit parameters GSSAP-1 2014-043 A USA 253 2014.07.28 GEOStar-1 Delta-4 M+(4,2) 36826 km×36775 km, 2.026° GSSAP-2 2014-043 B USA 254 2014.07.28 GEOStar-1 Delta-4 M+(4,2) 36116 km×36107 km, 1.322° GSSAP-3 2016-052 A USA 270 2016.08.19 GEOStar-1 Delta-4 M+(4,2)(upg.) 35768 km×35762 km, 0.848° GSSAP-4 2016-052 B USA 271 2016.08.19 GEOStar-1 Delta-4 M+(4,2)(upg.) 35748 km×35742 km, 0.817° GSSAP-5 2022-006 A USA 324 2022.01.21 - Atlas-5 35703 km×35697 km, 0.167° GSSAP-6 2022-006 B USA 325 2022.01.21 - Atlas-5 35704 km×35698 km, 0.343° GSSAP卫星获取的目标图像、无线电信号通过美国太空部队卫星控制网(Space Force Satellite Control Network,SFSCN)的地面站传输,数据发送到位于科罗拉多州施里弗空间部队基地的第9太空三角洲部队(Space Delta 9)的第1太空作战中队。据美国军事与航空电子网站2020年3月27日报道,美太空军第1太空作战中队已经完成GSSAP地面系统的大规模升级,升级后的系统于2019年12月完成试验,2020年2月12日通过作战验收。
截止到2022年10月8日,根据美国空军第18太空控制中队对外公布的数据显示,GSSAP-1轨道半长轴43179 km (GEO+1015 km),倾角2.026°;GSSAP-2轨道半长轴42490 km (GEO+326 km),倾角1.322°;GSSAP-3轨道半长轴42143 km (GEO-21 km),倾角0.848°;GSSAP-4轨道半长轴42124 km (GEO-40 km),倾角0.817°;GSSAP-5轨道半长轴42078 km (GEO-86 km),倾角0.167°;GSSAP-6轨道半长轴42079 km (GEO-85 km),倾角0.343°。
-
GSSAP卫星通常运行于近地球同步轨道(GEO±50 km,GEO=35793 km),形成相对GEO轨道向西漂移或向东漂移的巡视模式。经调研得知,GSSAP-1早期执行全球巡视详查,目前已进入坟墓轨道,GSSAP-2早期执行120°E~0°W的区域巡视,目前全球区域漂移[12]。
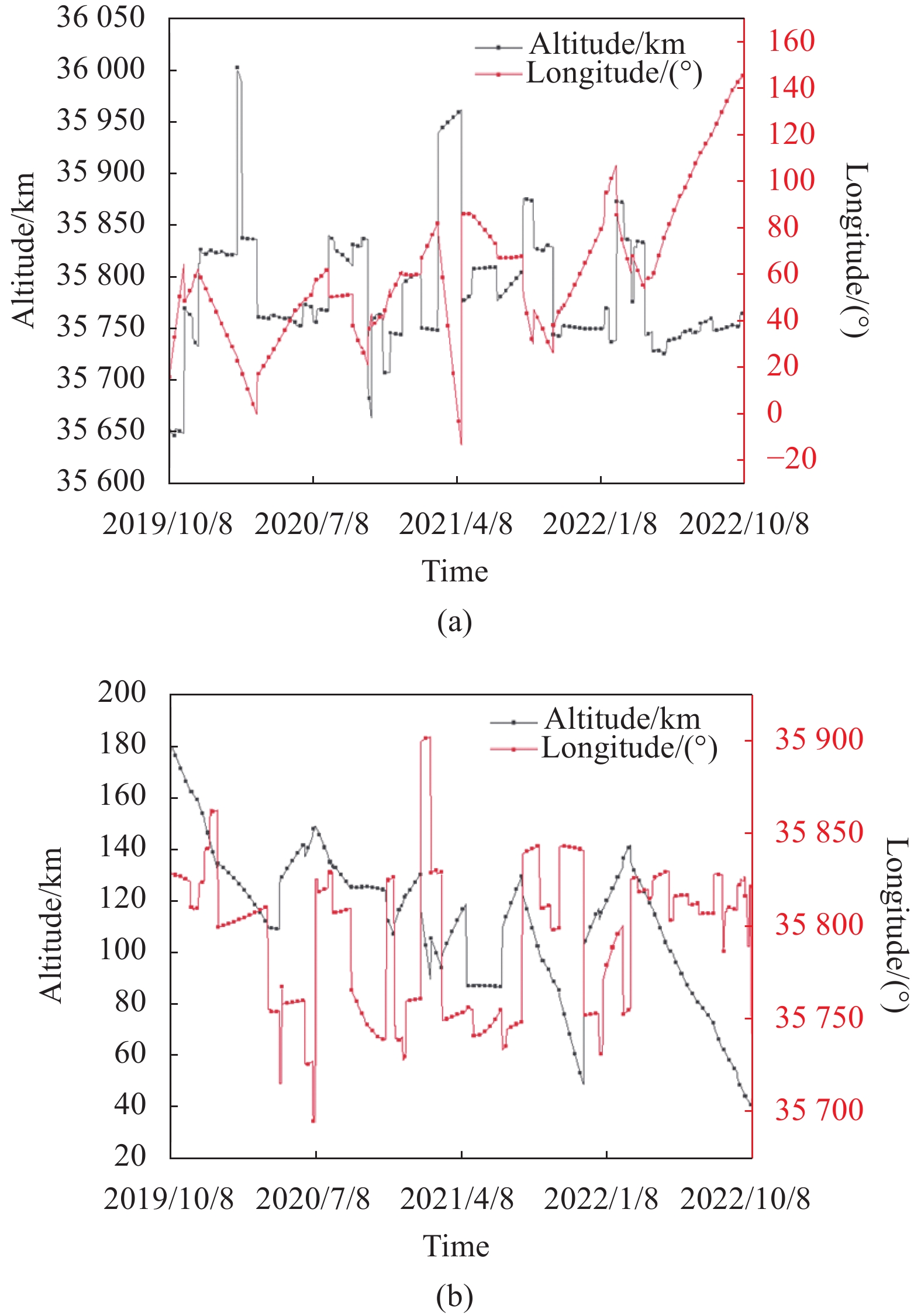
图2(a)所示为GSSAP-1近3年的轨道高度和星下点经度变化情况,经分析得出,此期间主要执行东半球GEO轨道巡视,并极有可能于2021年2月1日进入坟墓轨道。图2(b)所示为GSSAP-2近三年的轨道高度和星下点经度变化情况,经分析得出该期间主要执行整个GEO轨道的巡视。
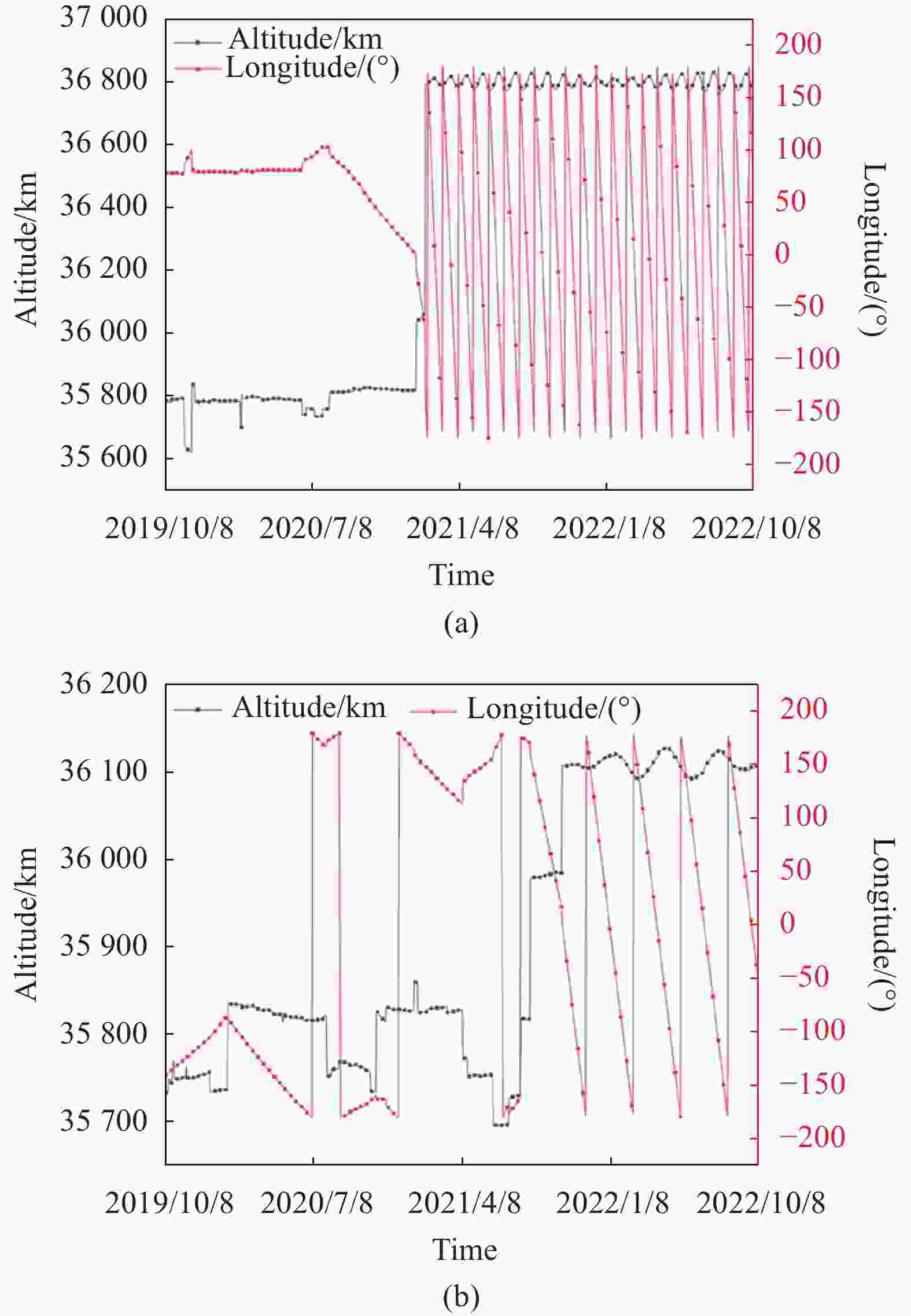
图 2 (a) GSSAP-1轨道高度和星下点经度;(b) GSSAP-2轨道高度和星下点经度
Figure 2. (a) GSSAP-1 altitude and longitude;(b) GSSAP-2 altitude and longitude
图3(a)所示为GSSAP-3近3年的轨道高度和星下点经度变化情况,此期间轨道变化频繁,大部分时间运行在GEO±50 km轨道上,但也出现GEO±150 km的情况,主要负责执行0°E~100°E巡视任务。图3(b)所示为GSSAP-4近三年的轨道高度和星下点经度变化情况,主要运行在GEO±50 km,主要负责执行50°E~180°E巡视任务。
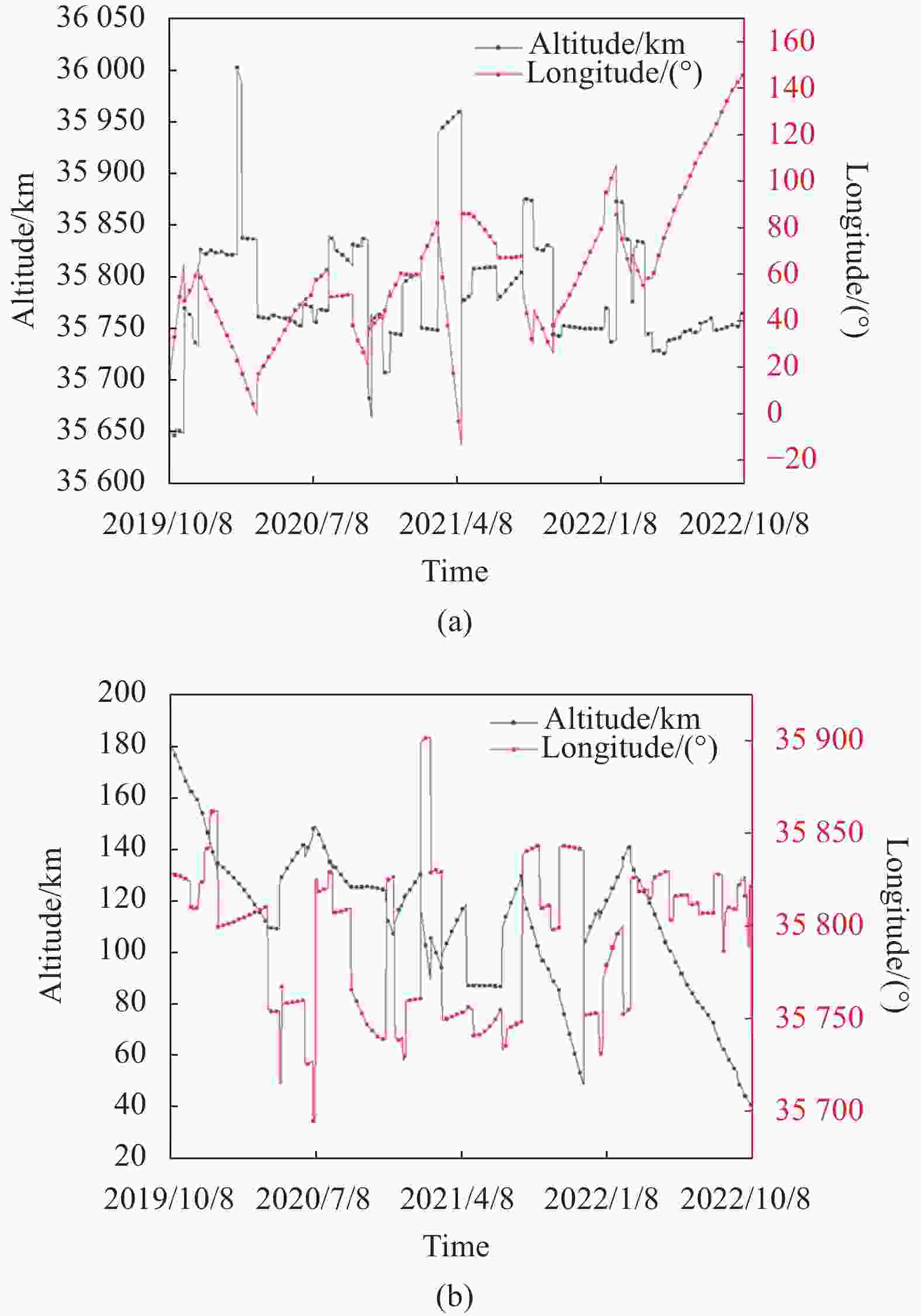
图 3 (a) GSSAP-3轨道高度和星下点经度;(b) GSSAP-4轨道高度和星下点经度
Figure 3. (a) GSSAP-3 altitude and longitude;(b) GSSAP-4 altitude and longitude
2022年4月19日,美军才正式对外公布GSSAP-5/6的星历数据。从图4(a)所示的GSSAP-5轨道变化情况可知,初始轨道高度保持在35785 km,从5月2日开始降低轨道高度,到6月底时降到35708 km;此后逐渐抬升轨道,至8月中旬升至GEO上方30 km处;8月下旬开始降低轨道高度,经过1个月的轨道漂移,最终定轨在35697 km;巡视范围为43°W~2.6°E,大多数时间以每天0.5°~1.2°的速度由西向东漂移。从图4(b)所示的GSSAP-6轨道变化情况可知,初始轨道高度保持在35733 km,5月2号开始抬升轨道,整个5月份一直保持35812 km;6月份轨道高度一直保持在35725 km,此后7、8月份经过多次轨道调整,最终定轨在35697 km;巡视范围为46°W~2.7°E,大多数时间以每天0.4°~1.1°的速度由西向东漂移。

图 4 (a) GSSAP-5轨道高度和星下点经度;(b) GSSAP-6轨道高度和星下点经度
Figure 4. (a) GSSAP-5 altitude and longitude;(b) GSSAP-6 altitude and longitude
-
参考文献[12]对GSSAP卫星的主要战技指标进行了综合研判,文中结合相关资料[13]给出了一些结论性数据。单颗GSSAP卫星的质量约为650~700 kg,本体几何尺寸约为1 m×1 m左右;供电系统由2个可展开的太阳电池翼构成,面积约为6 m2,有效功率为200 W (可扩展至1500 W);卫星平台为GEOStar-1,设计寿命5~8年,有效载荷150 kg,主推进系统采用双组元主发动机,具有310 s的比冲,可提供高达1000 m/s的速度增量,使卫星能够在任务过程中完成多种类型的轨道机动,轨道微调和定点保持机动则采用单组元推进模式;外形为一体结构,光学相机未安装转台,对目标跟踪均采用平台机动;卫星姿态确定由星敏感器和陀螺仪完成,指向精度优于0.4 mrad;姿态控制采用高扭矩反作用轮,姿态机动速度为1.0 (°)/s;轨道确定和授时基于GPS实现,定位精度为50 m。
-
GSSAP卫星对目标的抵近观测模式有两种,即绕飞和掠飞。绕飞模式适用于共面目标,掠飞模式适用于异面目标[14]。共面交会问题中,两个航天器运行轨道的倾角小于0.05°;在异面交会问题中,两个航天器运行轨道的倾角大于或等于0.05°[15]。
GSSAP卫星对目标绕飞的轨迹为椭圆,东西方向(前后方向)为长半轴,上下方向为短半轴,长半轴与短半轴的比例约为2∶1,如图5(a)所示。在掠飞观测模式下,GSSAP卫星的轨道一般在目标下方30~50 km处,利用轨道漂移实现对目标的成像侦察,如图6所示。

图 5 (a) GSSAP绕飞抵近3D示意图;(b) GSSAP绕飞抵近2D示意图
Figure 5. (a) GSSAP fly-around approaching orbit 3D visualization;(b) GSSAP fly-around approaching orbit 2D visualization

图 6 (a) GSSAP掠飞抵近3D示意图;(b) GSSAP掠飞抵近2D示意图
Figure 6. (a) GSSAP fly-by approaching orbit 3D visualization;(b) GSSAP fly-by approaching orbit 2D visualization
-
根据俄罗斯科学院ISON空间监测网络数据显示,GSSAP卫星自具备作战能力以来执行了数百次机动,并以10~15 km的距离完成了对俄罗斯、中国、巴基斯坦等国多颗卫星的抵近侦察[16],表2统计了部分抵近事件。
GSSAP卫星频繁的抵近行为对我国高价值空间资产的安全造成了严重威胁;同时,美军系列空间攻防技术试验,揭示了其阻断我国应用空间的能力和目标。笔者利用卫星两行轨道数据(TLE)对其工作模式、在轨活动进行了深入研究分析。选取GSSAP-1~4在2020~2021期间的TLE数据,其中GSSAP-1有198行、GSSAP-2有246行、GSSAP-3有124行、GSSAP-4有86行;同时获取我国在轨大部分GEO卫星在相同时间段内的TLE数据,利用轨道分析工具计算出GSSPA和目标卫星之间的距离,以1000 km左右为抵近判定的依据,得到潜在的数十次的抵近事件,被抵近的目标有北斗导航系列、通信试验系列、实践系列等GEO卫星,最近距离达到了9.54 km(实践-20),详细信息如表3所示。
表 2 被GSSAP抵近侦察的卫星
Table 2. Satellites being closely scouted by GSSAP
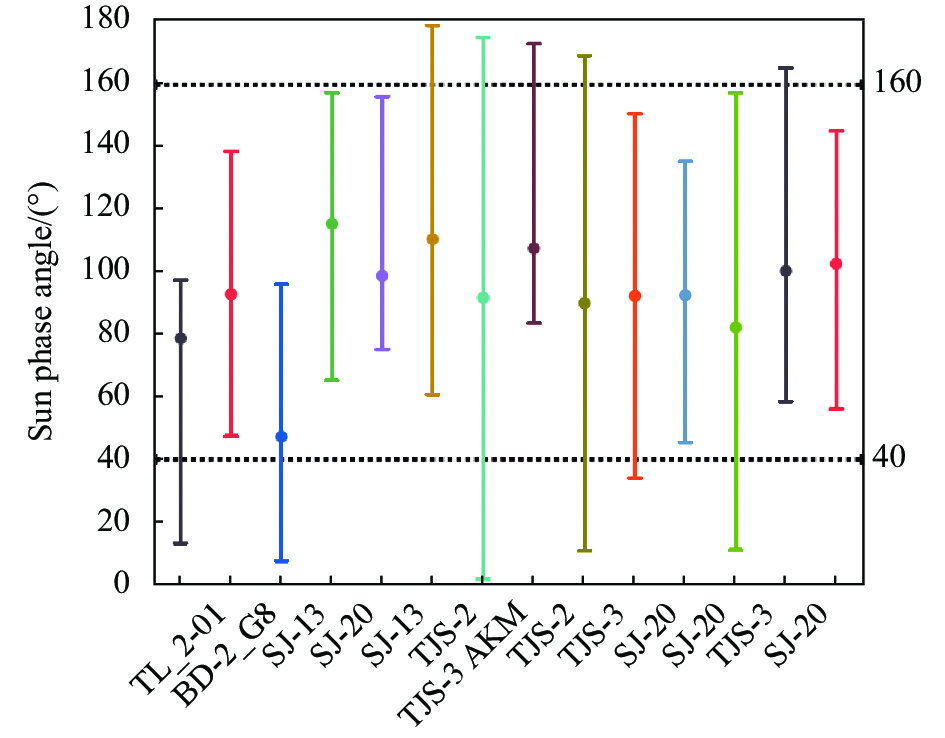
Date Satellite approached Country Range/km 2016-09-13 TJS-1 China 15 2017-07-13 Express AM-8 Russia 10 2017-09-14 Luch Russia 10 2017-09-21 Paksat 1 R Pakistan 12 2017-09-29 Nigcomsat 1 R Nigeria 11 2017-10-05 Blagovest Russia 14 2017-11-17 Raduga-1 M 3 Russia 12 2018-05-14 Raduga-1 M 2 Russia 13 2020-08-23 SJ-20/Chinasat 6 A China 24 2022-01 SJ-12 01,SJ-12 02 China 73 通常以太阳相位角[17]来描述目标、观察者、太阳的几何关系,即GSSAP-太阳连线与GSSAP-目标连线的夹角,不同相位角条件下,目标的亮度信息变化较大。通过对表3中列出的数十次抵近事件分析,得出了GSSAP抵近过程中的太阳相位角的变化情况,如图7所示,即GSSAP抵近时的太阳相位角一般保持在40°~160°之间,此时目标位于GSSAP的顺光观测区,可有效规避太阳杂散光对成像的影响;而GSSAP位于目标的逆光区,导致无法精确、实时的探测到空间抵近威胁。
表 3 被GSSAP抵近的我国高轨卫星
Table 3. China GEO satellites being approached by GSSAP
Date GSSAP Satellite approached COSPAR ID Range/km Longitude Mode 2020-02-26 GSSAP-1 TIANLIAN_2-01 2019-017 A 88.40 79.786°E Fly-around 2020-02-28 GSSAP-1 BD-2_G8 2019-027 A 109.97 79.786°W Fly-around 2020-04-8 GSSAP-4 SJ-13 2017-018 A 360.13 110.846°E Fly-around 2020-11-01 GSSAP-4 SJ-20 2019-097 A 11.60 124.940°E Fly-around 2020-11-23 GSSAP-4 SJ-13 2017-018 A 101.94 110.605°E Fly-by 2020-11-30 GSSAP-4 TJS-2 2017-001 A 53.38 107.448°E Fly-by 2021-01-01 GSSAP-3 TJS-3 AKM 2018-110 C 469.62 59.621°E Fly-around 2021-03-19 GSSAP-4 TJS-2 2017-001 A 28.37 107.435°E Fly-by 2021-04-16 GSSAP-3 TJS-3 2018-110 A 1141.25 86.098°E Fly-around 2021-05-03 GSSAP-3 SJ-20 2019-097 A 1032.06 86.090°E Fly-around 2021-05-04 GSSAP-4 SJ-20 2019-097 A 9.54 87.421°E Fly-around 2021-05-06 GSSAP-4 TJS-3 2018-110 A 104.29 87.641°E Fly-around 2021-09-30 GSSAP-4 SJ-20 2019-097 A 54.71 87.576°E Fly-by 2021-12-02 GSSAP-4 TJS-5 2020-002 A 56.70 107.546°E Fly-by 
图 7 GSSAP的太阳相位角
Figure 7. The sun phase angle of GSSAP
-
空间光学遥感器的成像仿真是个复杂的系统工程,需要对各个环节进行精细建模,模型的精度直接影响最终仿真结果的真实性和可信度。GSSAP的成像仿真过程可以分为三个步骤:目标与背景建模、光电传感器建模、场景成像模块。GSSAP成像仿真的每个步骤之间的输入、输出和数据流关系如图8所示。

图 8 GSSAP成像仿真流程图
Figure 8. Flow chart of GSSAP imaging simulation process
据Breaking Defense网站披露,GSSAP-4于2021年8月下旬对中国目前最大、最重的通信卫星-实践-20实施了抵近伴飞[18]。因此选取GSSAP-4抵近实践-20的场景为例,分析抵近过程中时成像效果。通过分析TLE数据得出,GSSAP与实践-20星的最近距离达到9.54 km,并处于有利的太阳相位角,达到了顺光成像观测目的。GSSAP-4与实践-20的相对距离和太阳相位角变化趋势如图9所示。
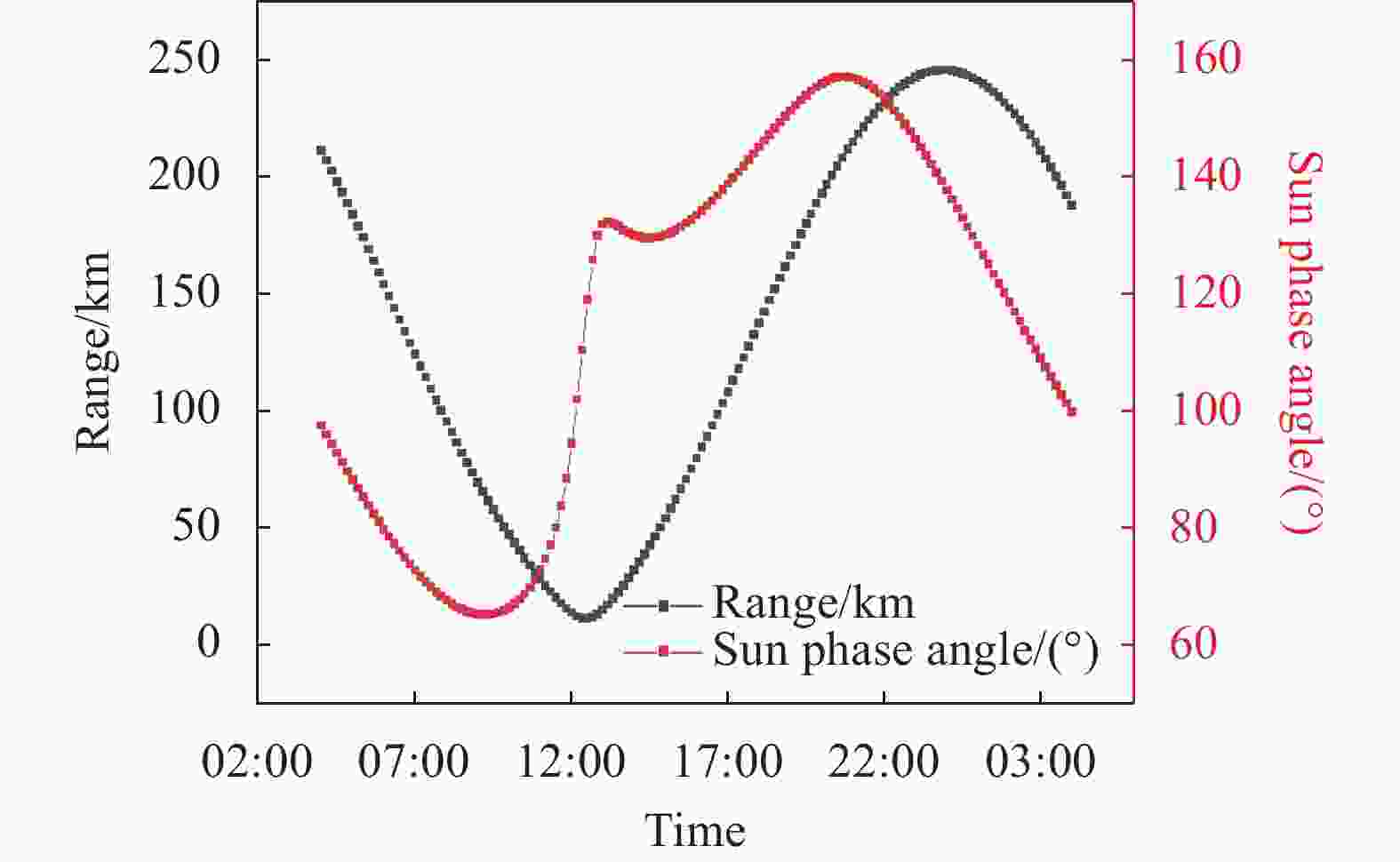
图 9 GSSAP的相对距离与太阳相位角
Figure 9. Relative distance of GSSAP and sun phase angle
-
笔者结合了卫星平台的总体情况、载荷的质量约束、在轨典型的作战模式等信息研判,推测出其光电成像有效载荷的口径为500 mm,F#为10,像素规模为1024 pixel×1024 pixel,像元间距为6.5 μm,探测谱段为450~680 nm,积分时间为20 ms,GSSAP的有效载荷详细参数如表4所示。
表 4 GSSAP有效载荷参数
Table 4. GSSAP payload parameters
Parameters Values Effective aperture/mm 500 F# 10 Field of view/(°) 0.076×0.076 Pixel pitch/μm 6.5 Integration time/ms 20 Spectral wavelength/nm 450-680 Number of pixels/pixel 1024×1024 Instantaneous field of view/(″) 0.268 Dynamic range 3000 Reference noise equivalent iradiance/W·cm−2·sr−1 1.0×e-15 Reference saturation equivalent iradiance/W·cm−2·sr−1 3.0×e-12 -
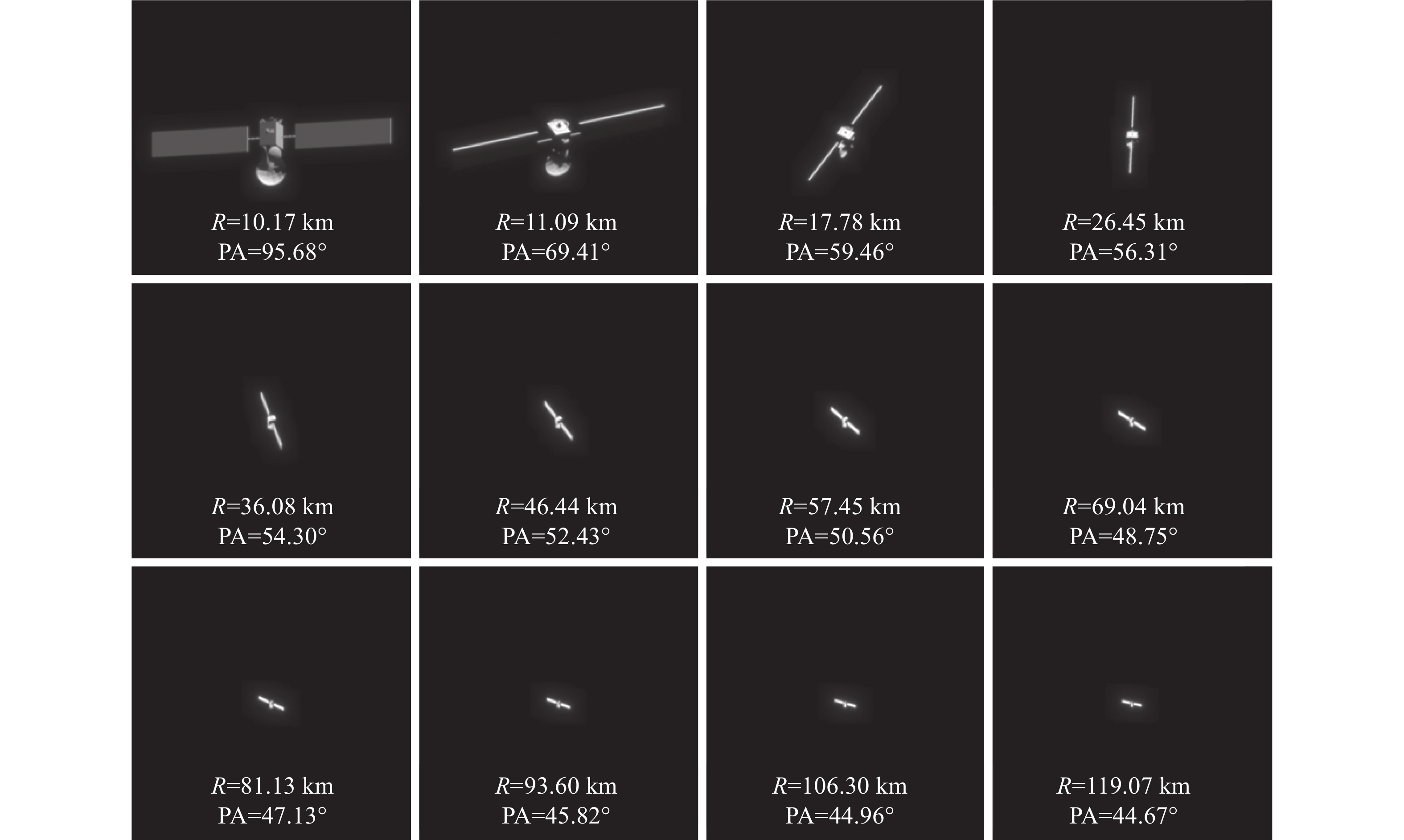
GSSAP-4在对实践-20卫星抵近成像的过程中充分利用了顺光成像的优势,借助轨道绕飞实现了对目标卫星多角度的精细成像。图10和图11展示了GSSAP抵近和离开实践-20的成像效果,该过程中GSSAP与目标之间的距离变化为133.18 km→10.17 km→119.07 km,太阳相位角保持在134.37°~44.67°,随着观测距离的减小和太阳相位角的变化,探测器的成像效果也越来越好。当距离到达50 km时,可获悉观测目标的大致结构,当距离达到20 km时,能够看到观测目标的具体细节。根据参考文献[19]中的探测器像元分辨率计算公式得知,在距离观测目标10 km时,GSSAP相机像元的空间分辨率为1.3 cm,此时可对观测目标进行高分辨率的精细成像,从而发现目标本体、太阳帆板、有效载荷等更多细节信息。由此,可以判断GSSAP卫星对目标的探测距离约为100 km左右,抵近详查的观测距离在10 km左右。此外,在不同的太阳相位角下,相机受太阳杂散光影响,GSSAP对目标成像效果差别较大,因此在高轨观测时需要综合考虑太阳光照和观测角度问题,选择合适的位置才能获得较好的成像结果。
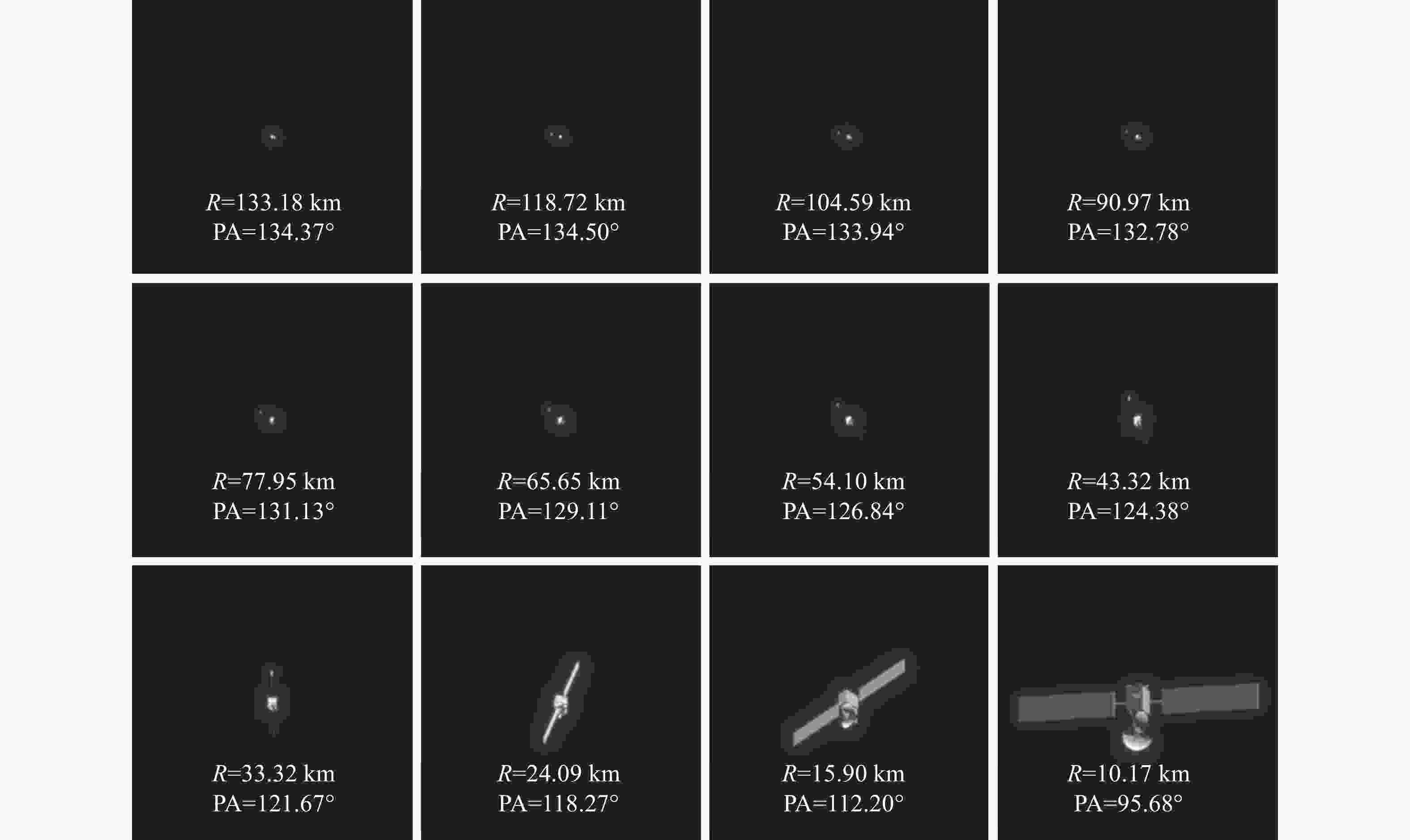
图 10 GSSAP抵近实践-20的成像结果
Figure 10. The imaging results of GSSAP closing to SJ-20
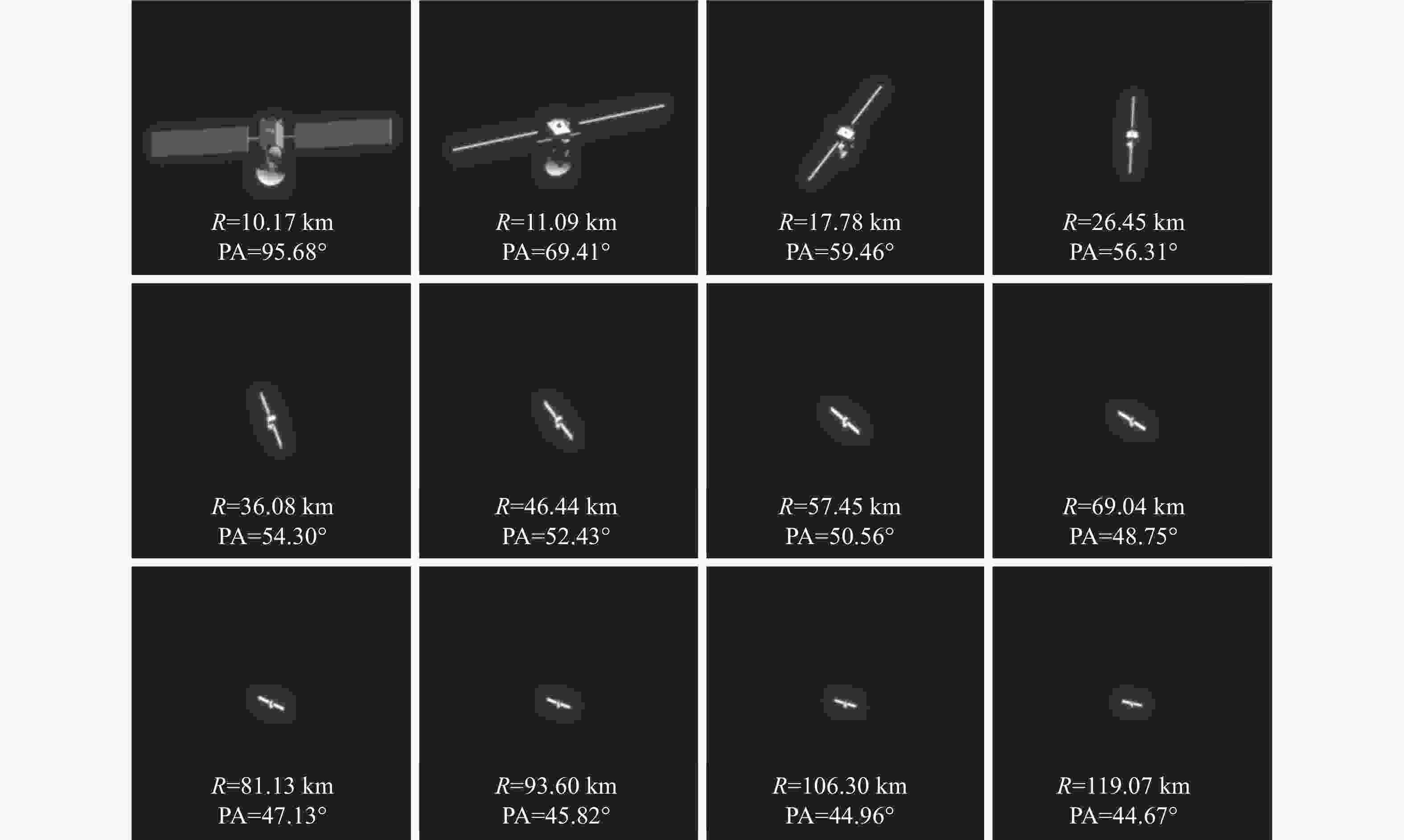
图 11 GSSAP远离实践-20的成像结果
Figure 11. The imaging results of GSSAP leaving from SJ-20
-
文中针对GSSAP卫星的总体设计、轨道特性、观测模式进行了分析研判,对GSSAP的历史星历数据进行了深入研究,挖掘出其对我国高轨GEO卫星的潜在抵近侦察事件,并对某次抵近过程进行了成像仿真分析。下一步需重点考虑相机有效口径、探测器积分时间、像元间距、噪声在一定范围内变化时,对成像效果以及探测能力的影响。针对高轨严峻的空间安全竞争态势,迫切需要研究和突破高精度交会与接近、近实时轨道异动感知、复杂光照条件下目标特性获取、多手段主动被防护等关键技术,以加强高轨空间高价值资产的自保护能力;此外,还需加快推进天地一体、分布式的态势感知网络建设,发展全维空间态势感知能力,实现对GEO目标的全天时、全天候的监视,确保太空环境安全和航天器运行安全。文中相关工作可为空间目标光学探测与识别、星载平台自主感知与对抗提供理论依据与数据支持,具有重要的工程应用价值。
On-orbit application research and imaging simulation analysis of GSSAP satellite
-
摘要: 针对高轨抵近威胁在轨自主感知问题,总结归纳了地球同步轨道空间态势感知计划的发展历程、平台情况、轨道特性、任务操控、总体指标;分析了GSSAP (Geosynchronous Space Situational Awareness Program)卫星的抵近观测成像模式,提炼出绕飞成像、掠飞成像在轨运行模式,深入研究了近年来GSSAP卫星两行轨道数据,结合我国高轨卫星的轨道信息,挖掘出GSSAP对我国高轨卫星的数十次潜在的抵近侦察活动;基于实测数据分析了GSSAP-4抵近实践-20卫星的整个过程,计算出二者的相对距离、太阳相位角等信息,在距离为10~133 km、太阳相位角为44.67°~134.37°的条件下,对GSSAP的光电载荷进行了成像效果仿真。结果表明:GSSAP对我国GEO (Geosynchronous Orbit)卫星执行了多次抵近监视,在口径为500 mm,F数为10,像元间距为6.5 μm,像素规模为1024×1024,积分时间为20 ms时,GSSAP在顺光观测条件下,可以对目标进行高分辨率的精细化成像,能够看清目标的细节信息,对我国GEO高价值资产带来严重威胁。Abstract:
Objective Geosynchronous orbit is a strategic location in space. It contains communications satellites, data relay satellites, electronic reconnaissance satellites, missile early warning satellites and weather satellites. With the continuous expansion of space mission scope, the application of GEO satellites has been extended to new space missions such as space-based situational awareness, acquisition of non-cooperative target characteristics, in-orbit control, rendezvous and proximity, etc. GEO region has gradually become the focus of attention of various countries, and related technologies have also become the forefront of international competition. In order to control this strategic area and ensure its superiority in space, the US military, supported by its military strategy, advanced technology and financial resources, has deployed a large amount of space offensive and defensive equipment. The United States Air Force put forward the Geosynchronous Space Situational Awareness Program (GSSAP). Through close tracking and monitoring of high-value targets, it can master the mission function, configuration, performance indicators, activity rules and other information of each satellite, and understand the intention, process and effect, so as to strengthen the one-way transparency advantage of space posture. Therefore, it is necessary to conduct in-depth research and analysis on the development history, platform condition, orbit characteristics, mission control and overall index of GSSAP satellite. Methods A portable imaging simulation process is built in this paper. GSSAP imaging simulation system includes target and background modeling, photoelectric sensor modeling, scene imaging generator (Fig.8). The event of GSSAP-4 close to Shijian-20 was selected as the research object (Fig.9). The phase angle and relative distance between GSSAP-4 and Shijian-20 satellite were calculated. The parameters of GSSAP electro-optical sensor were selected, with a 500 mm aperture (Tab.4). The imaging effect of GSSAP EO/IR sensor on Shijian-20 satellite was simulated (Fig.10). Results and Discussions The sun phase angle between GSSAP and the target was calculated, which is generally kept between 40° and 160° (Fig.7). At this time, the target was located in the down-light observation area of GSSAP, which can effectively avoid the influence of solar stray light on imaging. The sun phase angle and relative distance between GSSAP-4 and Shijian-20 satellite were calculated (Fig.9). The closest distance of them was 9.54 km. The imaging effects of GSSAP-4 were simulated at different distance and sun phase angle (Fig.10-11). At a distance of 10 km, the target body, solar panels and payload can be clearly seen. Conclusions In this study, the approach imaging mode of GSSAP satellite is analyzed, and the on-orbit operation mode of orbiting imaging and grazing imaging is extracted. The two-lines elements of GSSAP satellites in recent years were studied. Combined with the orbital information of Chinese high-orbit satellites, dozens of potential close-in reconnaissance activities of GSSAP for Chinese high-orbit satellites were found out. Based on the measured data, the whole process of GSSAP-4 close to the Shijian-20 was analyzed, and the relative distance and solar phase angle of the two were calculated. Under the conditions of distance of 10-133 km and solar phase angle of 44.67°-134.37°, the imaging effect of GSSAP electro-optical sensor was simulated. The results show that GSSAP has carried out multiple close-in surveillance of China GEO satellites. When the aperture is 500 mm, F number is 10, pixel pitch is 6.5 μm, pixel number is 1 024 pixel×1 024 pixel, and integration time is 20 ms, high-resolution fine imaging can be carried out on the target, and the details of the target can be clearly seen, which brings a serious threat to the high value assets of GEO in China. -
图 1 (a) GSSAP一箭双星运载布局示意图;(b) GSSAP卫星在轨运行示意图
Figure 1. (a) Diagram of GSSAP satellite carrier layout; (b) GSSAP satellite in orbit
图 2 (a) GSSAP-1轨道高度和星下点经度;(b) GSSAP-2轨道高度和星下点经度
Figure 2. (a) GSSAP-1 altitude and longitude;(b) GSSAP-2 altitude and longitude
图 3 (a) GSSAP-3轨道高度和星下点经度;(b) GSSAP-4轨道高度和星下点经度
Figure 3. (a) GSSAP-3 altitude and longitude;(b) GSSAP-4 altitude and longitude
图 4 (a) GSSAP-5轨道高度和星下点经度;(b) GSSAP-6轨道高度和星下点经度
Figure 4. (a) GSSAP-5 altitude and longitude;(b) GSSAP-6 altitude and longitude
图 5 (a) GSSAP绕飞抵近3D示意图;(b) GSSAP绕飞抵近2D示意图
Figure 5. (a) GSSAP fly-around approaching orbit 3D visualization;(b) GSSAP fly-around approaching orbit 2D visualization
图 6 (a) GSSAP掠飞抵近3D示意图;(b) GSSAP掠飞抵近2D示意图
Figure 6. (a) GSSAP fly-by approaching orbit 3D visualization;(b) GSSAP fly-by approaching orbit 2D visualization
表 1 GSSAP卫星基本信息
Table 1. GSSAP satellites basic information
Satellite COSPAR ID Name Launch date Platform Carrier rocket Current orbit parameters GSSAP-1 2014-043 A USA 253 2014.07.28 GEOStar-1 Delta-4 M+(4,2) 36826 km×36775 km, 2.026° GSSAP-2 2014-043 B USA 254 2014.07.28 GEOStar-1 Delta-4 M+(4,2) 36116 km×36107 km, 1.322° GSSAP-3 2016-052 A USA 270 2016.08.19 GEOStar-1 Delta-4 M+(4,2)(upg.) 35768 km×35762 km, 0.848° GSSAP-4 2016-052 B USA 271 2016.08.19 GEOStar-1 Delta-4 M+(4,2)(upg.) 35748 km×35742 km, 0.817° GSSAP-5 2022-006 A USA 324 2022.01.21 - Atlas-5 35703 km×35697 km, 0.167° GSSAP-6 2022-006 B USA 325 2022.01.21 - Atlas-5 35704 km×35698 km, 0.343°  下载: 导出CSV
下载: 导出CSV
表 2 被GSSAP抵近侦察的卫星
Table 2. Satellites being closely scouted by GSSAP
Date Satellite approached Country Range/km 2016-09-13 TJS-1 China 15 2017-07-13 Express AM-8 Russia 10 2017-09-14 Luch Russia 10 2017-09-21 Paksat 1 R Pakistan 12 2017-09-29 Nigcomsat 1 R Nigeria 11 2017-10-05 Blagovest Russia 14 2017-11-17 Raduga-1 M 3 Russia 12 2018-05-14 Raduga-1 M 2 Russia 13 2020-08-23 SJ-20/Chinasat 6 A China 24 2022-01 SJ-12 01,SJ-12 02 China 73
下载: 导出CSV
表 3 被GSSAP抵近的我国高轨卫星
Table 3. China GEO satellites being approached by GSSAP
Date GSSAP Satellite approached COSPAR ID Range/km Longitude Mode 2020-02-26 GSSAP-1 TIANLIAN_2-01 2019-017 A 88.40 79.786°E Fly-around 2020-02-28 GSSAP-1 BD-2_G8 2019-027 A 109.97 79.786°W Fly-around 2020-04-8 GSSAP-4 SJ-13 2017-018 A 360.13 110.846°E Fly-around 2020-11-01 GSSAP-4 SJ-20 2019-097 A 11.60 124.940°E Fly-around 2020-11-23 GSSAP-4 SJ-13 2017-018 A 101.94 110.605°E Fly-by 2020-11-30 GSSAP-4 TJS-2 2017-001 A 53.38 107.448°E Fly-by 2021-01-01 GSSAP-3 TJS-3 AKM 2018-110 C 469.62 59.621°E Fly-around 2021-03-19 GSSAP-4 TJS-2 2017-001 A 28.37 107.435°E Fly-by 2021-04-16 GSSAP-3 TJS-3 2018-110 A 1141.25 86.098°E Fly-around 2021-05-03 GSSAP-3 SJ-20 2019-097 A 1032.06 86.090°E Fly-around 2021-05-04 GSSAP-4 SJ-20 2019-097 A 9.54 87.421°E Fly-around 2021-05-06 GSSAP-4 TJS-3 2018-110 A 104.29 87.641°E Fly-around 2021-09-30 GSSAP-4 SJ-20 2019-097 A 54.71 87.576°E Fly-by 2021-12-02 GSSAP-4 TJS-5 2020-002 A 56.70 107.546°E Fly-by
下载: 导出CSV
表 4 GSSAP有效载荷参数
Table 4. GSSAP payload parameters
Parameters Values Effective aperture/mm 500 F# 10 Field of view/(°) 0.076×0.076 Pixel pitch/μm 6.5 Integration time/ms 20 Spectral wavelength/nm 450-680 Number of pixels/pixel 1024×1024 Instantaneous field of view/(″) 0.268 Dynamic range 3000 Reference noise equivalent iradiance/W·cm−2·sr−1 1.0×e-15 Reference saturation equivalent iradiance/W·cm−2·sr−1 3.0×e-12
下载: 导出CSV
-
[1] Hu Haiying, Zhu Yongsheng, Jiang Xinhua. The development trend of high earth orbit space security and key technologies [J]. Aerospace Control and Application, 2021, 41(19): 155-161. (in Chinese) [2] Han Yi, Chen Ming, Sun Huayan, et al. Imaging simulation method of TG-02 accompanying satellite’s visible camera [J]. Infrared and Laser Engineering, 2017, 46(12): 1208002. (in Chinese) [3] Lu Qi, Lin Tingting, Li Chengpeng, et al. Improved registration algorithm for spatial non-cooperative target point cloud clustering [J]. Infrared and Laser Engineering, 2021, 50(9): 20200431. (in Chinese) [4] Lu Shan, Xu Wei, Liu Zongming, et al. On-Orbit manipulation technique for spacecraft in HEO [J]. Journal of Astronautics, 2014, 35(4): 425-431. (in Chinese) [5] Du Ronghua, Zhang Xiang, Wang Ning, et al. Research on autonomous detection and tracking method for rendezvous and proximity of an uncooperative target [J]. Journal of Astronautics, 2021, 42(5): 621-633. (in Chinese) doi: 10.3873/j.issn.1000-1328.2021.05.009 [6] Gong Jinggang, Ning Yu, Lv Nan. Development and enlightenment of space based situational awareness technology for high orbit in the united states [J]. Aerospace Control and Application, 2021, 47(1): 1-7. (in Chinese) doi: 10.3969/j.issn.1674-1579.2021.01.001 [7] Meng Bo, Huang Jianbin, Li Zhi, et al. Introduction to american approaching operation satellite mitex in geostationary orbit and its inspiration [J]. Spacecraft Engineering, 2014, 23(3): 112-118. (in Chinese) doi: 10.3969/j.issn.1673-8748.2014.03.020 [8] Fan Zhihan, Cai Yaxing, Li Fengzan. Study on development of american space-based situational awareness technology for geo objects [J]. Spacecraft Engineering, 2019, 28(6): 87-95. (in Chinese) [9] Diao Huafei, Zhang Yasheng. Analysis of US geosynchronous satellite capability us situational awareness [J]. Aerospace Electronic Warfare, 2019, 35(4): 48-51. (in Chinese) [10] Song Rui, Song Xumin, Gao Yong, et al. Status and capability analysis of typical roving satellites in high orbit [J]. Aerospace China, 2021(10): 44-48. (in Chinese) doi: 10.3969/j.issn.1002-7742.2021.10.008 [11] Xiao Yuzhi, Chen Jizheng. Autonomous situation awareness of GEO objects based on orbital maneuver [J]. Spacecraft Recovery & Remote Sensing, 2021, 42(1): 1-10. (in Chinese) doi: 10.3969/j.issn.1009-8518.2021.01.001 [12] Wang Dianjun, Wu Guanqun, Han Lu, et al. Analysis and research on GSSAP observation [J]. Aerospace Control and Application, 2022, 48(3): 22-28. (in Chinese) [13] Spaceflight101. GSSAP satellite overview[EB/OL]. (2016-09-11)[2022-10-08]. https://spaceflight101.com/spacecraft/gssap/. [14] 袁建平. 航天器轨道机动动力学[M]. 北京: 中国宇航出版社, 2010. Yuan Jianping. Dynamics of Spacecraft Orbital Maneuver[M]. Beijing: China Astronautic Publishing House, 2010. (in Chinese) [15] 高泽天. 高轨航天器近距离交会任务规划研究[D]. 哈尔滨工业大学, 2018. Gao Zetian. Maneuver scheme planning of the close-range rendezvous for the high earth orbit spacecraft[D]. Harbin: Harbin Institute of Technology, 2018. (in Chinese) [16] Brian Weeden, Victoria Samson. Global counterspace capabilities: An open source assessment[D]. US: Secure World Foundation, 2022. [17] 李骏. 空间目标天基光学监视跟踪关键技术研究[D]. 国防科学技术大学, 2009. Li Jun. Research on key technologies of space objects surveillance and tracking in space-based optical surveillance[D]. Changsha: National University of Defense Technology, 2019. (in Chinese) [18] Breaking Defense. US, China, Russia Test New Space War Tactics: Sats Buzzing, Spoofing, Spying[EB/OL]. (2021-10-28) [2022-10-19]. https://breakingdefense.com/2021/10/us-china-russia-test-new-space-war-tactics-sats-buzzing-spoofing-spying/. [19] Song Mingzhu, Qu Hongsong, Zhang Guixiang, et al. Design of aerospace camera circular scanning imaging model [J]. Infrared and Laser Engineering, 2018, 47(7): 0708001. (in Chinese) -

 点击查看大图
点击查看大图

计量
- 文章访问数: 1793
- HTML全文浏览量: 789
- PDF下载量: 250
- 被引次数: 0

