









-
2.5 m大视场高分辨率望远镜是一台日夜两用高度复杂的观测设备,既能实现白天高分辨率太阳观测,又能做到夜晚天文精细观测[1]。在对太阳高分辨率观测的过程中,大量来自太阳的热辐射会经主焦点处的热光阑反射到消光筒上,不仅影响望远镜镜筒局部视宁度,而且可能会直接造成后端光电器件甚至机械结构的热损坏[2]。因此,国内外许多国家在研制太阳望远镜的同时都开展了热光阑温控技术的研究。德国GREGOR太阳望远镜热光阑采用单入口双循环冷却结构设计,通过强制液冷的方式进行温控,控制热光阑表面最高温度不高于环境温度5 K[3];美国DKIST太阳望远镜热光阑采用反射吸收式结构设计方案,通过主动温控系统对反射器和吸收器进行冷却,将热光阑温升控制在不高于环境温度6 K[4];欧洲EST太阳望远镜热光阑采用平板反射式热光阑,通过射流冲击冷却法控制热光阑表面温度不高于环境温度8 K[5]。我国CLST太阳望远镜热光阑采用多入口单腔式冷却结构设计,通过主动液冷温控方式将热光阑表面温度与环境温度差值控制在±2 ℃范围内[6]。文中针对2.5 m大视场高分辨率望远镜消光筒的温控指标要求,拟将消光筒表面平均温度控制在环境温度2 ℃以内作为目标开展温度控制研究。
由于温度具有非线性、大滞后、大惯性等特点,温度的采集和精确控制都具有一定的挑战性[7]。目前常用的温度控制方法有大林算法、Smith预估器、模糊PID控制和自抗扰控制(ADRC)等。朴昌浩等[8]通过建立模糊库进行模糊推理,对常规PID参数进行在线调节,使用模糊PID实现对汽车座舱温度的优化控制;吴建峰等[9]利用大林算法提高了热连轧带钢轧后卷取温度的控制精度;Feliu-Batll 等[10]基于Smith预估器设计了改进的Smith-PI控制器,提高了炼油厂加热炉温度控制的灵敏度和鲁棒性;姜炎坤等[11]通过自抗扰算法兼顾了红外气体检测系统温度控制的快速性和超调量。大林算法和Smith预估器在系统模型精确时可以有效克服大滞后并得到较好的控制性能,然而,在大多数实际工程中要获取系统的精确模型是不现实的,对于缺乏精确模型或参数时变的纯滞后过程控制系统,这两者都难以取得令人满意的控制效果[12];模糊算法虽然不依赖系统的精确模型,但其控制精度与现场操作人员的控制经验以及相关专家的知识直接相关,这在实际工程中都难以准确控制。
太阳望远镜消光筒温控系统具有时滞性,目前常用的ADRC时滞系统控制方法主要有忽略被控对象的时滞环节、将时滞环节等效为一阶惯性环节并采用高一阶的ADRC控制器、将被控对象等效为不含时滞部分及其微分与时滞环节的乘积之和设计ADRC控制器[13]。这三种方法不仅存在系统偏差,而且参数较多,整定困难。针对以上问题,文中设计了一种ADRC-Smith控制器,这种控制器不存在系统偏差,可以克服系统大滞后,且参数较少,整定简单,将其应用于2.5 m大视场高分辨率望远镜消光筒温控系统,可以实现系统性能的提升,也可为其主镜和反射光阑温控系统设计提供指导意义。
-
2.5 m大视场高分辨率望远镜温控系统按照热载荷分布特点可分为主焦点温控系统和主镜温控系统。文中主要研究主焦点处消光筒温控系统,其工作原理如图1所示。

图 1 消光筒温控系统原理
Figure 1. Principle of the temperature control system of the extinction tube
为了满足2.5 m大视场高分辨率望远镜消光筒温控要求,通过温度传感器同时采集消光筒壁面温度和环境温度数据,发送到上位机中经控制算法处理,根据消光筒壁面温度和环境温度的偏差值调节水冷机的制冷温度及制冷量,将壁面温度控制在环境温度2 ℃以内,实现对消光筒壁面温度的实时控制。
-
对消光筒建立数学模型,假设在单位时间内消光筒表面温度下降所释放的热量全部被水冷机中流入的冷却循环水带走,即消光筒热量的减少量等于冷却循环水热量的增加量。根据传热学理论可得:
$$ -CM{\rm{d}}{T}_{B}=hA\left({T}_{B}-{T}_{r}\right){\rm{d}}t $$ (1) 式中:C为消光筒材料的比热容,J·(kg·℃)−1;M为消光筒的质量,kg;TB为消光筒表面温度,℃;h为对流换热系数,W·(m2·℃)−1;A为固体壁面的面积,m2;Tr为流入消光筒冷却循环水的温度,℃。整理后可得消光筒壁面温度和冷却循环水温度的传递函数:
$$ \frac{{T}_{B}}{{T}_{r}}=\frac{1}{{T}_{1}s+1} $$ (2) 式中:$ {T}_{1}=\dfrac{CM}{HA} $。
水冷机采用PD控制,其他环节可简化为比例环节,由于热惯性,温度传导需要时间,在采集温度信号时会存在滞后的现象。因此,太阳望远镜消光筒的温度控制系统可以等价为一个带有滞后环节的二阶模型,其传递函数为:
$$ G\left(s\right)=\frac{{K}_{1}\left(1+{T}_{d}s\right)}{\left({T}_{1}s+1\right)\left({T}_{2}s+1\right)}{{\rm{e}}}^{-\tau s} $$ (3) 式中:$ {K}_{1}=K{K}_{p} $,$ K $为比例系数;$ {T}_{d}={K}_{d}/{K}_{p} $,${K}_{d}$、${K}_{p}$分别为水冷机的比例和微分系数;$ {T}_{1} $为消光筒的时间常数;$ {T}_{2} $为温度传感器的时间常数;$ \tau $为纯滞后时间常数。
-
温控系统的输入为水冷机的设定值,在开环情况下可以手动设置,输出为消光筒壁面温度,采用温度传感器Pt100采集消光筒的壁面温度,实时上传到上位机储存。通过在消光筒内侧粘贴加热功率可控的加热片模拟太阳热量,电源分配插座(PDU)可以实时显示功率。在恒定功率800 W下将消光筒壁面加热到34 ℃,打开水冷机,并将水冷机的水温设定为14 ℃,记录系统输出。
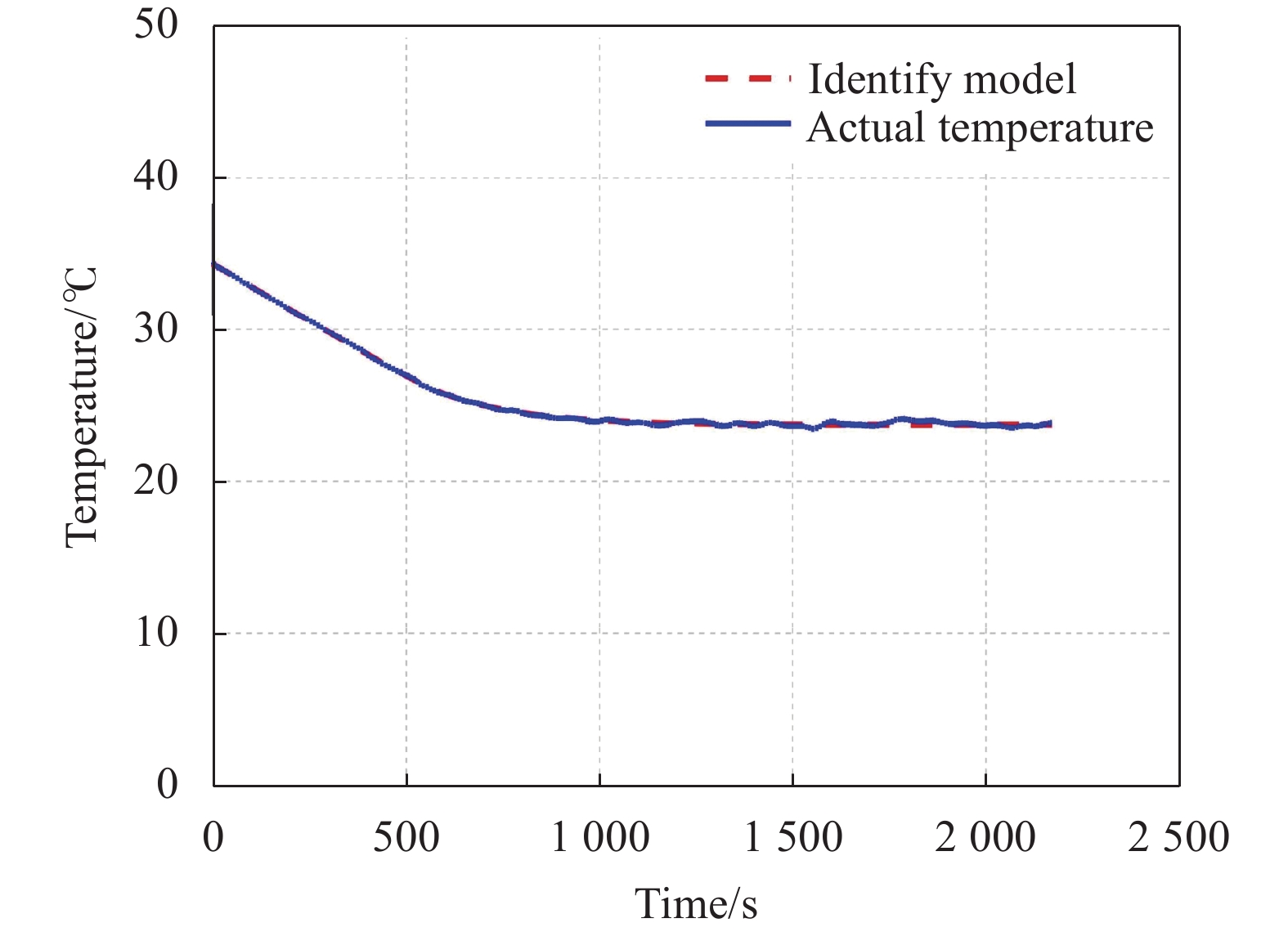
利用MATLAB仿真软件System Identification工具箱结合输入输出数据进行系统辨识,可以获得消光筒温控系统模型参数的估计值。消光筒温控系统参数辨识的原理框图和实验装置如图1、图2所示。实验与辨识模型响应对比图如图3所示。

图 2 消光筒温控系统模型辨识实验装置
Figure 2. Model identification experimental device diagram of matting cylinder temperature control system

图 3 实验与辨识模型响应对比图
Figure 3. Comparison of model response from experiment and recognition
辨识出的模型参数为:$ {K}_{1}=1.7 $,$ {T}_{d}=36 $,$ {T}_{1}=1 \; 896 $,$ {T}_{2}=226 $,$ \tau =551 $,则消光筒温控系统的数学模型为:
$$G\left(s\right)=\frac{1.7\left(1+36s\right)}{\left(1 \; 896s+1\right)\left(226s+1\right)}{{{{\rm{e}}}}}^{-551s}$$ (4) -
Smith预估器也称为纯滞后补偿器,其设计目标是引入一个纯滞后环节,与被控对象并联[14],在实际工程项目中一般等效为与控制器反向并联,使补偿后闭环系统的特征方程不含纯滞后项${{{{\rm{e}}}}}^{-\tau s}$,原理如图4所示。

图 4 Smith预估器原理图
Figure 4. Schematic of the Smith predictor
由图4可以得出,经Smith预估器补偿后系统的等效传递函数为:
$${G\left(s\right)}^{{'}}=\frac{{G}_{c}\left(s\right){G}_{p}\left(s\right)}{1+{G}_{c}\left(s\right){G}_{p}\left(s\right)}{{\rm{e}}}^{-\tau s}$$ (5) 经过补偿后控制器的被控对象变为$ {G}_{p}\left(s\right) $,闭环系统的特征方程中不再含有纯滞后项${{\rm{e}}}^{-\tau s}$,系统的动态性能与$ {G}_{p}\left(s\right) $一致,只在输出时间上延迟$ \tau $,从而可以消除滞后性对控制系统的不利影响,提高系统的稳定性。Smith预估常与PID控制器反向并联使用,基于Smith预估器的PID温控系统能有效克服纯滞后对控制系统稳定的影响[15],而在实际工程应用中,大多数情况下系统模型不能准确获取,且系统参数可能存在时变性,采用PID-Smith控制器难以达到满意的控制效果。
-
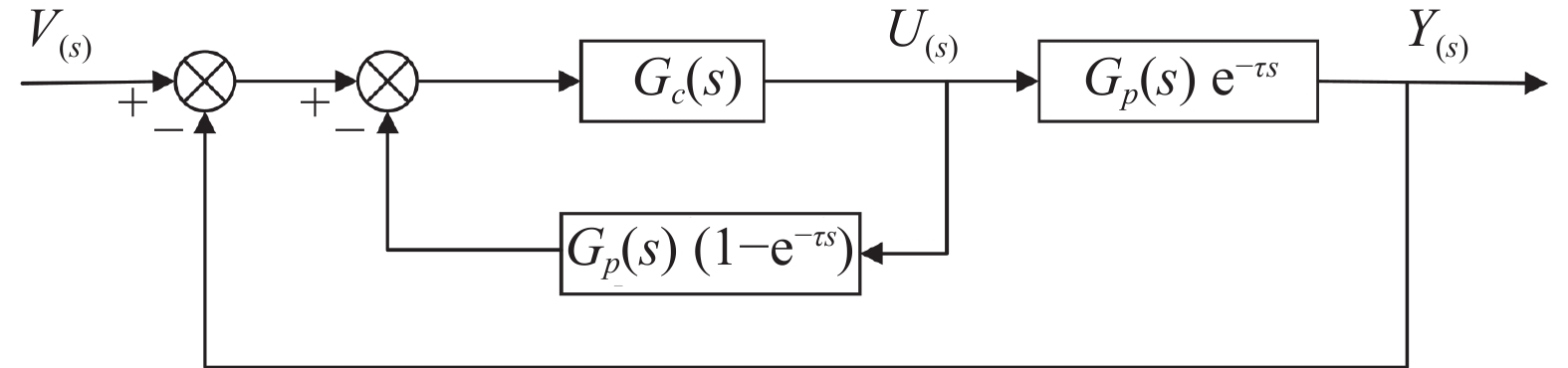
针对PID-Smith控制器的局限性,文中提出将Smith预估器和自抗扰控制器相结合的控制策略,其基本思路是在线性ADRC的基础上,在ESO信号输入端增加一个Smith预估模块,用Smith预估器抵消闭环特征方程中出现的时滞项,用自抗扰控制器来提高温控系统的响应速度和鲁棒性。ADRC-Smith控制器结构如图5所示。在控制器结构中自抗扰控制器为二阶系统。

图 5 ADRC-Smith控制器结构图
Figure 5. Block diagram of ADRC-Smith controller
-
$$ \left\{ \begin{gathered} {x_1}\left( {k + 1} \right) = {x_1}\left( k \right) + h{x_2}\left( k \right) \\ {x_2}\left( {k + 1} \right) = {x_2}\left( k \right) + hfhan\left( {{x_1}\left( k \right) - {v_0}\left( k \right),{x_2}\left( k \right),r,{h_0}} \right) \\ \end{gathered} \right. $$ (6) 式中:$ r $为速度因子;$ {v}_{0}\left(k\right) $为输入量;$ {x}_{1}\left(k\right) $为输出量,会在加速度$ r $的限制下以最快的速度跟踪输入${v}_{0}\left(k\right); fhan\left({x}_{1}\left(k\right)-{v}_{0}\left(k\right),{x}_{2}\left(k\right),r,{h}_{0}\right)$为最速控制综合函数[16]。
-
二阶系统为:
$$ \left\{\begin{array}{l}\dot{{x}_{1}}={x}_{2}\\ \dot{{x}_{2}}=f\left({x}_{1},{x}_{2},t,\omega \left(t\right)\right)+bu \\ y={x}_{1}\end{array}\right. $$ (7) 将系统外部扰动和未建模部分(总扰动)扩张为一个新的状态变量:$ {x}_{3}=f\left({x}_{1},{x}_{2},t,\omega \left(t\right)\right)+\left(b-{b}_{0}\right)u $,$ {b}_{0} $为估计值,令$ \dot{{x}_{3}}=f $,则原被控系统变为:
$$ \left\{\begin{array}{l}\dot{{x}_{1}}={x}_{2}\\ \dot{{x}_{2}}={x}_{3}+{b}_{0}u\\ \dot{{x}_{3}}=f\\ y={x}_{1}\end{array}\right. $$ (8) 转化为连续的扩张状态空间描述为:
$$ \left\{\begin{array}{c}\dot{x}=Ax+Bu+Ef\\ y=Cx\end{array}\right. $$ (9) 式中:$ A=\left[\begin{array}{ccc}0& 1& 0\\ 0& 0& 1\\ 0& 0& 0\end{array}\right] $;$ B=\left[\begin{array}{c}0\\ {b}_{0}\\ 0\end{array}\right] $;${E}=\left[\begin{array}{c}0\\ 0\\ 1\end{array}\right]$;$ C= [\begin{array}{ccc}1& 0& 0\end{array}] $。设计线性观测器对上述系统进行观测,其形式如下所示:
$$ \left\{\begin{array}{l}\dot{{{\textit{z}}}_{1}}={{\textit{z}}}_{2}-{\beta }_{01}{{\textit{z}}}_{1}+{\beta }_{01}{x}_{1}\\ \dot{{{\textit{z}}}_{2}}={{\textit{z}}}_{3}-{\beta }_{02}{{\textit{z}}}_{1}+{\beta }_{02}{x}_{1}+{b}_{0}u\\ \dot{{{\textit{z}}}_{3}}=-{\beta }_{03}{{\textit{z}}}_{1}+{\beta }_{03}{x}_{1}\end{array}\right. $$ (10) 式中:$ {{\textit{z}}}_{1} $、$ {{\textit{z}}}_{2} $、$ {{\textit{z}}}_{3} $分别对应$ {x}_{1} $、$ {x}_{2} $、$ {x}_{3} $的估计值。由此,可以得到线性扩张观测器的特征方程为:$ {\mathrm{\lambda }}_{\left(s\right)}={s}^{3}+{\; \beta }_{01}{s}^{2}+ {\; \beta }_{02}s+ {\; \beta }_{03} $。文中采用高志强博士提出的基于系统带宽参数化算法的扩张观测器参数整定策略[17]。用极点配置的方法,将观测器的极点配置在$ -{\omega }_{0} $,即将特征方程配置为$ {\mathrm{\lambda }}_{\left(s\right)}={\left(s+{\omega }_{0}\right)}^{3} $,因此,参数配置为$ {\; \beta }_{01}= 3{\omega }_{0} $,$ {\; \beta }_{02}={3{\omega }_{0}}^{2} $,$ {\; \beta }_{03}={{\omega }_{0}}^{3} $,其中,$ {\omega }_{0} $为观测器的带宽。
-
根据上述扩张观测器估计出的总扰动$ {x}_{3} $,设计控制量为$ u=\dfrac{{u}_{0}-{{\textit{z}}}_{3}}{{b}_{0}} $,由此原被控系统变成线性的纯积分器串联型系统:$ \ddot{{x}_{1}}={u}_{0} $。对于简化后的系统可采用PD组合控制器,为:$ {u}_{0}={k}_{p}\left(v-{{\textit{z}}}_{1}\right)-{k}_{d}{{\textit{z}}}_{2} $[18],其中,$ v $为设定值,$ {{\textit{z}}}_{1} $和$ {{\textit{z}}}_{2} $为观测器的观测值。被控系统的传递函数为:$ {G}_{c}=\dfrac{{K}_{p}}{{s}^{2}+{k}_{d}s+{k}_{p}} $,根据极点配置令$ {\left(s+{\omega }_{c}\right)}^{3}= {s}^{2}+{k}_{d}s+{k}_{p} $,则$ {k}_{p}={{\omega }_{c}}^{2} $,$ {k}_{d}=2{\omega }_{c} $,其中,$ {\omega }_{c} $为控制器带宽。
综上所述知,经过参数化后需要调节的主要参数有$ TD(r,h,{h}_{0}) $、$ {b}_{0} $、$ {\omega }_{0} $和$ {\omega }_{c} $。其中,$ {h}_{0} $可取为采样周期$ h $的整数倍,因此,系统中真正需要调整的参数为控制量增益$ r $、补偿因子$ {b}_{0} $、观测器带宽$ {\omega }_{0} $、控制器带宽$ {\omega }_{c} $。
-
为比较两种控制策略的控制效果,验证文中提出控制算法的性能,基于之前辨识出的系统模型,在相同的MATLAB/SIMULINK环境下建立PID-Smith控制器和ADRC-Smith控制器模型。因系统模型已知,且Smith预估器根据系统模型确定,只需要分别设计PID控制器和ADRC控制器的参数。PID控制器的参数使用工程整定法进行调整优化。ADRC控制器一共有四个参数需要调整。快速因子$ r $越大,跟踪速度越快,但是一般情况下,$ r $大到一定的程度后再大就几乎没有影响,一般取300~500。观测器带宽$ {\omega }_{0} $越大,系统稳定时间越短,跟踪误差越小,但当其值过大时会导致系统震荡,需要根据设计要求选择。根据现代控制理论,参数选择时应满足闭环主导极点的概念,即观测器的期望极点与虚轴的距离比闭环系统的期望极点与虚轴的距离远五倍以上,因此,观测器与控制器的带宽选择一般为$ {\omega }_{0}= $5~10${\omega }_{c} $[19]。补偿因子$ {b}_{0} $相当于控制增益,与系统特性相关,根据系统传递函数确认。
经过优化设计,控制器的参数如下。PID控制器参数为:$ {K}_{p}=39,{K}_{I}=0.018,{K}_{d}=4 \; 000 $;ADRC控制器参数为 :$ r=300,{\omega }_{0}=58{,\omega }_{c}=10,{b}_{0}=0.0 01\; 1 $。
-
当模型准确时,仿真结果如图6所示。从仿真曲线中可以看出,ADRC-Smith控制器的稳定时间和超调量都明显小于PID-Smith控制器。
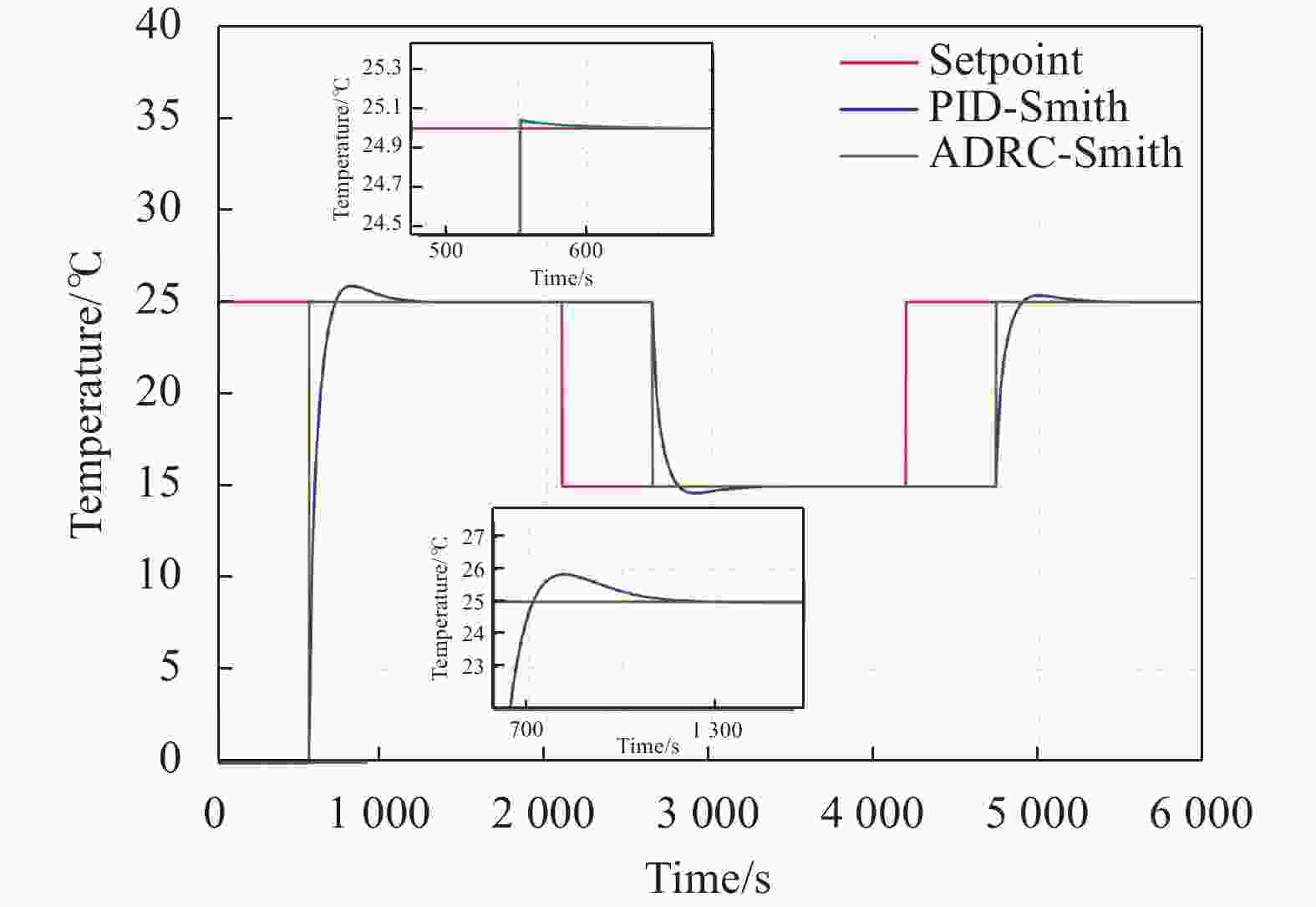
图 6 模型准确时不同控制器响应曲线
Figure 6. Response curves of different controllers when the model is accurate
-
在实际工程问题中,由于被控对象具有非线性和不确定性,Smith预估器的模型与被控对象的模型很难保持一致。模型中的主要参数有Smith预估器的增益、时间常数和时滞常数,其中时滞常数可以在开环时较为准确地预估。当Smith预估器的模型增益$ K $和时间常数$ {T}_{1} $、$ {T}_{2} $与实际模型分别有20%、10%、10%偏差时,仍选择同一套仿真参数进行仿真,仿真结果如图7所示。

图 7 模型失调时不同控制器响应曲线
Figure 7. Response curves of different controllers when the model is offset
从仿真曲线中可以看出,当模型失配时,ADRC-Smith控制器仍具有良好的动态性能,稳定时间和超调量都优于PID-Smith控制器。
-
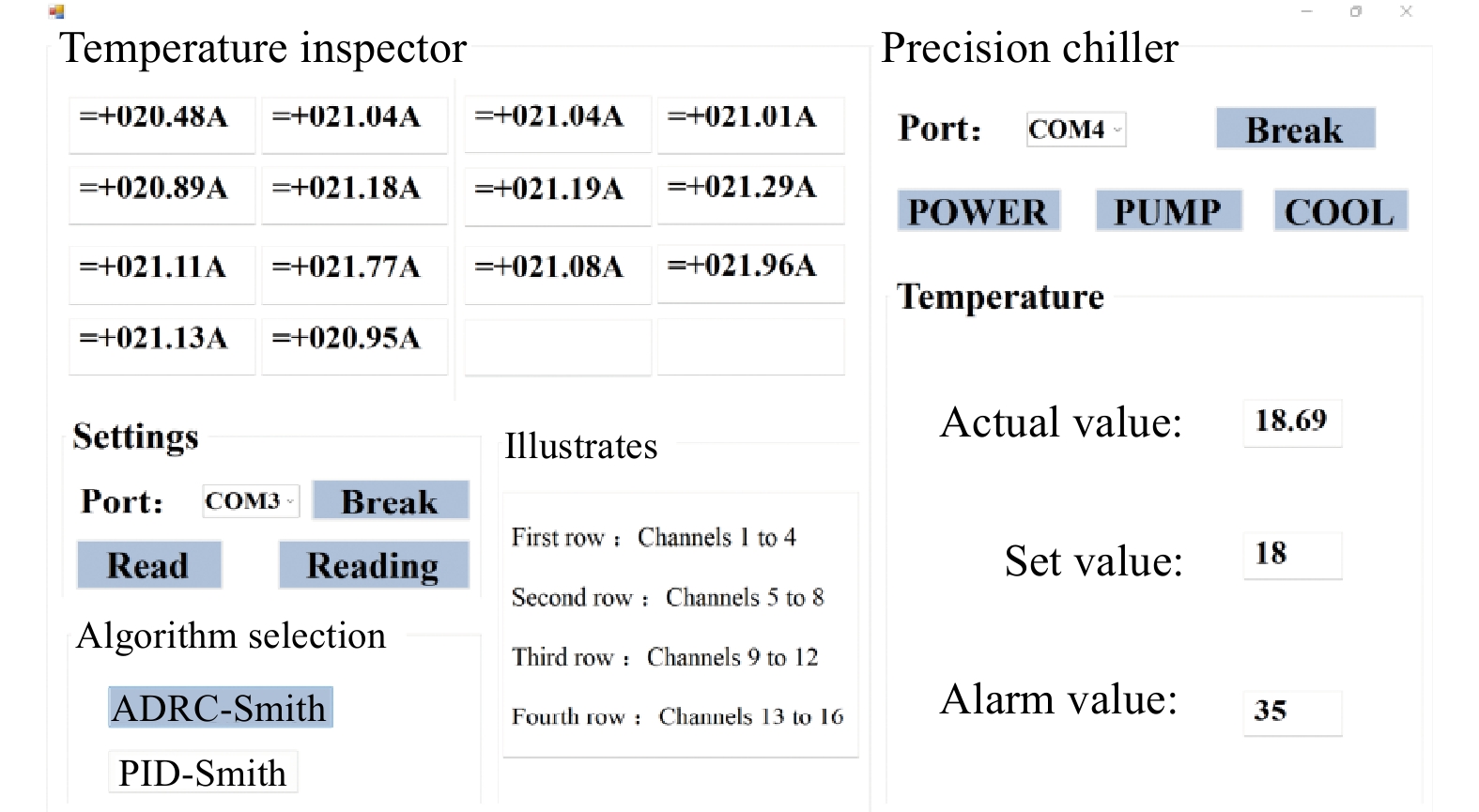
为了验证算法的可行性,搭建温度控制系统。温控系统主要由发热回路、循环水回路和测温控制回路三部分组成。实验原理和装置如图1、图2所示。基于.Net开发平台使用C#语言设计系统控制算法和控制界面,控制界面如图8所示。温度传感器同时采集消光筒外壁温度和环境温度,经温度巡检仪转换成数字信号,通过RS232通讯传送到控制界面实时显示并储存,控制算法根据消光筒外壁温度与环境温度差值决定是否产生控制信号,产生的控制信号经RS485通讯驱动水冷机。水冷机中的冷却水经分水器分成四路进入消光筒,带走热量后流回到水冷机,形成一个自循环回路。

图 8 消光筒温控系统界面
Figure 8. Matting cylinder temperature control system interface
-
加热片热功率约为800 W,水冷机中水的体积约为8 L,实验共使用14个温度传感器,经过统一标定后,其中12个分为上中下三层均匀贴在消光筒外壁上,消光筒外壁温度取12个温度传感器的平均值,两个用于测量环境温度。
实验环境温度约为24 ℃,消光筒外壁初始温度为30 ℃,目标温度需控制在环境温度2 ℃以内。每秒钟采集一个温度数据,不同控制器控制的响应曲线如图9所示。系统性能对比如表1所示。

图 9 (a) ADRC-Smith跟踪环境温度曲线;(b) PID-Smith跟踪环境温度曲线
Figure 9. (a) Tracking environmental temperature curve of ADRC-Smith; (b) Tracking environmental temperature curve of PID-Smith
表 1 控制器性能对比
Table 1. Performance comparison of different controllers
Controller Responds
time/sSetting
time/sSteady-state error
RMS/℃ADRC-Smith 59 173 0.14 PID-Smith 51 349 0.49 PID-Smith控制器到达环境温度2 ℃内的响应时间约为51 s,略微优于ADRC-Smith控制器的响应时间59 s,但这并不影响ADRC-Smith控制器性能整体要优于PID-Smith控制器性能。ADRC-Smith控制器跟踪上环境温度的稳定时间约为173 s,与PID-Smith控制器相比缩短了约176 s,减少了约50.4%,稳态误差约为0.14 ℃,相比PID-Smith控制器减小了约0.35 ℃,提高了约71.4%。实验结果表明,ADRC-Smith控制器具有更好的动态性能和稳态性能。
-
控制器稳定性测试实验是在稳定实验室温度下进行的,环境温度虽然存在微小波动但整体较为稳定,在工程应用中望远镜工作环境温度可能会出现较大波动,需要动态地引入热源干扰,进一步检验控制算法的可靠性。首先使用一台空调控制实验室温度约为22 ℃,待其稳定后,打开另一台空调,提高环境温度,稳定后约为26 ℃,其他条件与4.1节中相同。ADRC-Smith控制器的响应曲线如图10所示。ADRC-Smith控制器可以在外部环境发生较大波动时实现对环境温度的实时跟踪。

图 10 热源干扰下ADRC-Smith控制器的响应曲线
Figure 10. ADRC-Smith controller response curve under heat source interference
-
文中针对2.5 m大视场高分辨率望远镜消光筒温度控制的指标要求,在线性ADRC扩张观测器的输入端增加Smith预估模块,设计ADRC-Smith控制器,搭建控制系统。在环境温度24 ℃左右时,获取PID-Smith控制器和ADRC-Smith控制器跟踪环境温度的曲线,比较两者的控制性能。相比于PID-Smith控制器,ADRC-Smith控制器跟踪上环境温度的稳定时间减少了约50.4%,稳态误差提高了约71.4%。实验结果表明,ADRC-Smith控制器不仅能满足2.5 m大视场高分率望远镜消光筒的温控指标要求,而且能提高系统的动态性能和稳态性能,也为该望远镜主镜和反射光阑温控提供了技术储备。
Temperature control of extinction tube for the 2.5-meter large-field and high-resolution telescope
-
摘要: 2.5 m大视场高分辨率望远镜消光筒会接收来自主焦点处的热辐射,加热镜筒内空气,产生随机湍流,降低视宁度,影响望远镜成像质量。为解决这一问题,满足2.5 m望远镜温控指标要求,设计Smith自抗扰控制器(ADRC-Smith),利用自抗扰控制结合Smith预估算法实现对消光筒壁面温度的精确控制。首先,建立消光筒温控系统模型,给出ADRC-Smith控制器的结构和调参方法;其次,对消光筒温控系统进行仿真,分析控制器的可行性;最后,搭建消光筒温控系统,实验验证控制器的实用性。实验结果表明,ADRC-Smith控制器可以将消光筒壁面温度控制在环境温度2 ℃内,对应的响应时间和稳定时间分别约为59 s和173 s,跟随误差约为0.14 ℃。研究表明,ADRC-Smith控制器可以提高2.5 m大视场高分辨率望远镜消光筒温控系统的性能。
-
关键词:
- 2.5 m大视场高分辨率望远镜 /
- 消光筒 /
- 温度控制 /
- 自抗扰控制器 /
- Smith预估器
Abstract:Objective The extinction tube of the 2.5-meter large-field and high-resolution telescope receives thermal radiation from the main focal point, heats the air in the lens barrel, generates random turbulence, reduces the astronomical seeing, and affects the imaging quality of the telescope. In order to solve this problem and meet the temperature control index requirements of temperature control, the Smith-Active Disturbance Rejection Controller (ADRC-Smith) is designed. Methods The designed ADRC-Smith controller uses the automatic disturbance rejection control combined with the Smith predictor method, which adds a Smith estimation module to the ESO signal input of the linear ADRC, uses the Smith predictor to cancel the time delay term in the closed-loop characteristic equation, and uses the automatic disturbance rejection controller to improve the response speed and robustness of the temperature control system to achieve accurate control of the extinction cylinder wall temperature. Firstly, the mechanism modeling and model parameter identification of the extinction cylinder temperature control system are carried out (Fig.3), the model of the extinction cylinder temperature control system is established, and the structure (Fig.5) as well as the parameter adjustment method of the ADRC-Smith controller are given. Secondly, according to the system model, the temperature control system of the matting cylinder is simulated when the model is accurate and the model is out of alignment to analyze the feasibility of the controller (Fig.6-7). Finally, the temperature control system of the matting cylinder at the main focus is set up for carrying out stability and reliability test to verify the practicality of the controller (Fig.1-2). Results and Discussions The experiment results of the stability test show that the ADRC-Smith controller can quickly track the ambient temperature, control the temperature of the extinction cylinder wall within 2 ℃ of the ambient temperature, and the corresponding response time and settling time are about 59 s and 173 s respectively, and the following error is about 0.14 ℃ (Fig.9, Tab.1). After that, the reliability test of the controller is carried out, and the reliability of the controller is further verified by introducing heat source interference to cause large fluctuations in the ambient temperature (Fig.10). The results show that the ADRC-Smith controller can improve the performance of the extinction tube temperature control system of the 2.5-meter large-field and high-resolution telescope. Conclusions Aiming at the temperature control research of the 2.5-meter large-field and high-resolution telescope extinction tube, the control goal is to control the temperature of its outer wall within 2 ℃ of the ambient temperature. The temperature control system of the extinction cylinder was designed and built. The temperature control system model was established through mechanism analysis and model parameter identification. According to the characteristics of the controlled object, the ADRC-Smith controller is designed by combining Smith predictor and active disturbance rejection controller. The controller has no system deviation, which can overcome the large lag of the system, has fewer parameters and can be easy to get the parameters. On the basis of the simulation results which verify the feasibility of the controller, the stability and reliability test are carried out respectively, and it is verified that the controller can be applied to the extinction cylinder temperature control system of 2.5-meter large-field and high-resolution telescope, and the system performance can be improved. The research results can also provide guidance for the design of the temperature control system of its primary mirror and reflecting diaphragm. -
图 1 消光筒温控系统原理
Figure 1. Principle of the temperature control system of the extinction tube
图 2 消光筒温控系统模型辨识实验装置
Figure 2. Model identification experimental device diagram of matting cylinder temperature control system
图 3 实验与辨识模型响应对比图
Figure 3. Comparison of model response from experiment and recognition
图 6 模型准确时不同控制器响应曲线
Figure 6. Response curves of different controllers when the model is accurate
图 7 模型失调时不同控制器响应曲线
Figure 7. Response curves of different controllers when the model is offset
图 9 (a) ADRC-Smith跟踪环境温度曲线;(b) PID-Smith跟踪环境温度曲线
Figure 9. (a) Tracking environmental temperature curve of ADRC-Smith; (b) Tracking environmental temperature curve of PID-Smith
图 10 热源干扰下ADRC-Smith控制器的响应曲线
Figure 10. ADRC-Smith controller response curve under heat source interference
表 1 控制器性能对比
Table 1. Performance comparison of different controllers
Controller Responds
time/sSetting
time/sSteady-state error
RMS/℃ADRC-Smith 59 173 0.14 PID-Smith 51 349 0.49  下载: 导出CSV
下载: 导出CSV
-
[1] 方成, 顾伯忠, 袁祥岩, 等. 2.5 m大视场高分辨率望远镜 [J]. 中国科学: 物理学 力学 天文学, 2019, 49(05)20-34. Fang Cheng, Gu Bozhong, Yuan Xiangyang, et al. 2.5 m wide-field and high-resolution telescope [J]. Scientia Sinica Physica, Mechanica & Astronomica, 2019, 49(5): 20-34. (in Chinese) [2] Liu Y Y. Research on active temperature control technology of large-aperture ground-based solar telescope [D]. Beijing: University of Chinese Academy of Sciences, 2016. (in Chinese) [3] Volkmer R, Eisentrager P, Emde P, et al. Mechanical design of the solar telescope GREGOR [J]. Astronomische Nachrichten, 2012, 333(9): 816-822. doi: 10.1002/asna.201211740 [4] Rimmele T R, Warner M, Keil S L, et al. Inouye solar telescope-observatory overview [J]. Solar Physics, 2020, 295(12): 172. doi: 10.1007/s11207-020-01736-7 [5] Berrilli F, Egidi A, Del Moro D, et al. The heat stop for the 4-m European Solar Telescope EST [C]//SPIE, 2010, 7733: 77332Z. [6] Yan Zhiwu, Gu Naiting, Liu Yangyi, et al. Modeling and experiment validation of thermal control for the heat-stop of the chinese large solar telescope [J]. J Astron Telesc Instrum Syst, 2021, 7(3): 13. [7] 吴俊, 李长俊. 基于TEC的高精度温控系统设计 [J]. 电子设计工程, 2017, 25(20)75-9. doi: 10.3969/j.issn.1674-6236.2017.20.019 Wu Jun, Li Changjun. Design of high precision temperature control system based on TEC [J]. Electronic Design Engineering, 2017, 25(20): 75-9. (in Chinese) doi: 10.3969/j.issn.1674-6236.2017.20.019 [8] Piao C, Wang W, Liu Z, et al. Research on vehicle cabin temperature and thermal comfort optimal control based on fuzzy PID [J]. Journal of Physics: Conference Series, 2021, 1865(3): 032039. [9] Wu Jianfeng, Wang Xiaobo, Liu Ye. The design of feedback control system for the cooling process of hot rolled strip based on dahlinalgorithm [C]//CPCC, 2014: 1098-1101. [10] Feliu-Batll V, Rivas-Perez R. Control of the temperature in a petroleum refinery heating furnace based on a robust modified Smith predictor [J]. ISA Transactions, 2020, 112: 251-270. [11] 姜炎坤, 朴亨, 王鹏, 等. 采用线性自抗扰技术的高精度温度控制系统研制 [J]. 红外与激光工程, 2021, 52(02)296-301. Jiang Yankun, Piao Heng, Wang Peng, et al. Research on high precision temperature control system using linear auto disturbance rejection technique [J]. Infrared and Laser Engineering, 2021, 52(2): 20210813. (in Chinese) [12] 邵惠鹤. 工业过程高级控制 [M]. 上海: 上海交通大学出版社, 2003. [13] 韩京清. 时滞对象的自抗扰控制 [J]. 控制工程, 2008, (S2)7-10+8. doi: 10.14107/j.cnki.kzgc.2008.s2.052 Han Jingqing. Auto-disturbances rejection control for time-dely systems [J]. Control Engineering of China, 2008, 15(S): 7-10, 18. (in Chinese) doi: 10.14107/j.cnki.kzgc.2008.s2.052 [14] Gnanamurugan N M, Senthilkumar A. Smith predictor for control of the process with long dead time [J]. RITA, 2018, 2(6): 81-85. [15] Bogdanovs N, Belinskis R, Krumins A, et al. Smith predictor for control of the temperature process with long dead time [C]//ICINCO, 2019, 1: 173-179. [16] Yan Guangya, Ai Wu, Chen Bing, et al. PMLSM active disturbance rejection control [J]. Transactions of China Electrotechnical Society, 2011, 26(9): 60-66. (in Chinese) [17] Zheng Qing, Gao Zhiqiang. Active disturbance rejection control: between the formulation in time and the understanding in frequency [J]. Control Theory and Technology, 2016, 14(3): 250-259. [18] Gao Z, Miklosovic R, Radke A, et al. Controllers, observers, and applications thereof: US, 8060340B2 [P]. 2011-11-15. [19] 李浩, 张振超, 李国平, 等. 拼接镜面望远镜位移促动器系统的自抗扰控制 [J]. 红外与激光工程, 2019, (2)8. Li Hao, Zhang Zhengchao, Li Guopin, et al. Active disturbance rejection control of position actuator system for segmented mirror telescope [J]. Infrared and Laser Engineering, 2019, 48(2): 0218005. (in Chinese) -

 点击查看大图
点击查看大图

计量
- 文章访问数: 101
- HTML全文浏览量: 18
- PDF下载量: 26
- 被引次数: 0

