








-
星敏感器以恒星为参照系,通过探测天球上不同位置的恒星进行姿态解算,为航天器提供准确的空间姿态。为满足商业小卫星的应用需求,亟需发展精度高、质量轻、体积小、可靠性高和生产周期短的甚高精度(测量精度范围为1″~3″)微型星敏感器。公开资料显示,德国JENA公司研制的ASTRO APS3测量精度优于2.4″(3σ),包络尺寸为137 mm×137 mm×213 mm,质量小于1.8 kg;国内天银星际研制的NST5 S-A1测量精度优于2″(3σ),包络尺寸为166 mm×70 mm×57 mm,质量为380 g;PST4 S-H1测量精度优于3″(3σ),包络尺寸为200 mm×86 mm×90 mm,质量为310 g。
甚高精度微型星敏感器首要解决的问题是提升测量精度,其次要满足轻小型化设计要求。测量精度主要取决于单星定位精度和定姿星数量,而单星定位精度受测角精度和标定精度影响,同时测角精度受制于像元分辨率以及像元细分精度。此外,系统探测灵敏度与透过率、通光口径、能量集中度等密切相关。因此,必须依据对测量精度以及探测灵敏度的要求开展甚高精度微型星敏感器光学系统设计。文献[1]设计了一款大视场低畸变光学系统,其F数为1.49,全视场弥散斑RMS直径小于10 μm,但其未使用耐辐射材料,无法适用于空间环境;文献[2]设计了大相对孔径宽光谱星敏感器光学镜头,其F数为1.25,全视场弥散斑RMS直径小于10.3 μm,但视场比较小,不适用于多星探测;文献[3]设计了一款F数为1.1的光学系统,其全视场RMS直径为8.8 μm,但工作波段较窄,难以实现高灵敏探测,且不利于轻小型设计;文献[4]设计了一款小型化宽谱段星敏感器光学系统,其采用色差消除技术达到减少通光口径的目的,但可探测极限星等仅为5等星。
综上所述,文中开展了甚高精度微型星敏感器光学系统设计与验证工作,即光学系统指标论证、光学系统设计以及光学系统测试验证,可为甚高精度微型星敏感器的工程应用提供理论基础与技术支持。
-
甚高精度微型星敏感器输入指标包括:1)初始阶段可探测极限星等为6.5等星,累计60 krad(Si)辐射后可探测极限星等为6.0等星;2)测量精度2.0″(3σ);3)数据更新率10 Hz;4)工作温度范围−40~60 ℃。此外,选用的探测器型号为CMV4000,其为近红外增强型。
姿态测量精度是星敏感器的核心技术指标,其由单星测量精度和定姿星平均数量决定,如下:
$$ \left\{ {\begin{array}{*{20}{c}} {{\sigma _{{\text{pitch}}}} = {\sigma _{{\text{azimuth}}}} = \dfrac{{{\sigma _{{{xy}}}}}}{{\sqrt n }}} \\ {{\sigma _{{\text{roll}}}} = \sqrt {\dfrac{2}{{n - 1}}} \cdot \dfrac{{{\sigma _{{{xy}}}}}}{\theta }} \\ {{\sigma _{{{xy}}}} = \sqrt {{\sigma ^2}_{\text{s}} + {\sigma _{{\text{cal}}}}^2} } \\ {{\sigma _{\text{s}}} = \varsigma \cdot {\sigma _{{\text{sa}}}}} \\ {\varsigma = \dfrac{\omega }{{{N_{{\text{pix}}}}}}} \end{array}} \right. $$ (1) 式中:${\sigma _{{\text{pitch}}}}$、${\sigma _{{\text{azimuth}}}}$分别为俯仰姿态测量精度、方位测量精度,即2.0″(3σ);$n$为平均定姿星数量,预设值为12;${\sigma _{{\text{roll}}}}$为滚动测量误差角度;$\theta $为平均星间角距;${\sigma _{{{xy}}}}$为单星测量精度;${\sigma _{\text{s}}}$为测角精度;$ {\sigma _{{\text{cal}}}} $为标定精度,其大小取决于光学系统像差、光机系统装调、标定算法以及标定设备精度等;$\varsigma $为像元分辨率;${\sigma _{{\text{sa}}}}$为像元细分精度;$\omega $为半视场;${N_{{\text{pix}}}}$为半视场对应像元数量。
-
绝大多数恒星的光谱分布都与黑体接近,可以用维恩位移定律描述一定温度的黑体与其辐射光谱之间的关系,即:
$$ \lambda \cdot T = {{A}} $$ (2) 式中:A= 2 898 μm·K;λ为峰值波长;T为黑体的温度。
以修正后的HipJ2000星表为输入,辐照度大于等于6.5等星的恒星共8870颗,每个谱段星数分布如表1所示。
查阅成都光明玻璃材料手册可知,相比其他波长而言,h光以下的透过率较低,将导致多镜片光路的光学系统透过率更低;F光处的折射率随波长减小而变化得更明显,将导致光路设计难度加大,故需要更多镜片作为优化变量,因此可采用的波长起始值范围为480~500 nm。同时,结合探测器光谱量子响应效率,当波长大于850 nm时,其值较低,故选定的工作谱段为500~850 nm。
表 1 HipJ2000星表
Table 1. HipJ2000 star catalogue
Spectrum Color
temperature/KPeak
wavelength/nmStars
(number)O Greater than 30000 Lower than 96.6 50 B 10000-30000 96.9-289.8 1262 A 7500-10000 289.8-386.4 1729 F 6000-7500 386.4-483 1190 G 5000-6000 483-579.6 1131 K 3500-5000 579.6-828 2469 M 2000-3500 828-1449 517 -
星点提取多采用二维高斯分布函数模型[5-10],具体公式如下:
$$ \begin{split} I\left( {{{x}},y,{x_0},{y_0}} \right) =& \frac{1}{{2{\text{π }}{\sigma _{{\text{PSF}}}}^2}}\exp \left[ {{{ - {{\left( {x - {x_0}} \right)}^2}} \mathord{\left/ {\vphantom {{ - {{\left( {x - {x_0}} \right)}^2}} {2{\sigma _{{\text{PSF}}}}^2}}} \right. } {2{\sigma _{{\text{PSF}}}}^2}}} \right] \cdot \\& \exp \left[ {{{ - {{\left( {y - {y_0}} \right)}^2}} \mathord{\left/ {\vphantom {{ - {{\left( {y - {y_0}} \right)}^2}} {2{\sigma _{{\text{PSF}}}}^2}}} \right. } {2{\sigma _{{\text{PSF}}}}^2}}} \right] \end{split} $$ (3) 式中:$ I $为星点在像面处归一化的能量;$\left({x}_{0},{y}_{0}\right)$为星点真实质心坐标;$ \left( {x,y} \right) $为像素坐标;$ {\sigma _{{\text{PSF}}}} $为高斯半径。由于$ x,y $独立,为方便模型分析,可考虑一维情况,即:
$$ I\left( {x,{x_0}} \right) = \frac{1}{{\sqrt {2{\text{π }}} {\sigma _{{\text{PSF}}}}}}\exp \left[ {{{ - {{\left( {x - {x_0}} \right)}^2}} \mathord{\left/ {\vphantom {{ - {{\left( {x - {x_0}} \right)}^2}} {2{\sigma _{{\text{PSF}}}}^2}}} \right. } {2{\sigma _{{\text{PSF}}}}^2}}} \right] $$ (4) 工程上通常采用质心加权法提取星点坐标,如下:
$$ \hat x = {{\sum\nolimits_i {{x_i}\int\limits_{{x_i} - 0.5}^{{x_i} + 0.5} {I\left( {x,{x_0}} \right)} {\text{d}}x} } \mathord{\left/ {\vphantom {{\sum\nolimits_i {{x_i}\int\limits_{{x_i} - 0.5}^{{x_i} + 0.5} {I\left( {x,{x_0}} \right)} {\text{d}}x} } {\sum\nolimits_i {\int\limits_{{x_i} - 0.5}^{{x_i} + 0.5} {I\left( {x,{x_0}} \right)} {\text{d}}x} }}} \right. } {\sum\nolimits_i {\int\limits_{{x_i} - 0.5}^{{x_i} + 0.5} {I\left( {x,{x_0}} \right)} {\text{d}}x} }} $$ (5) 由于质心不一定在像元中心位置$ {x_0} $处,公式(5)的质心提取模型精度${\sigma _{{\text{sa}}}}$由下式决定:
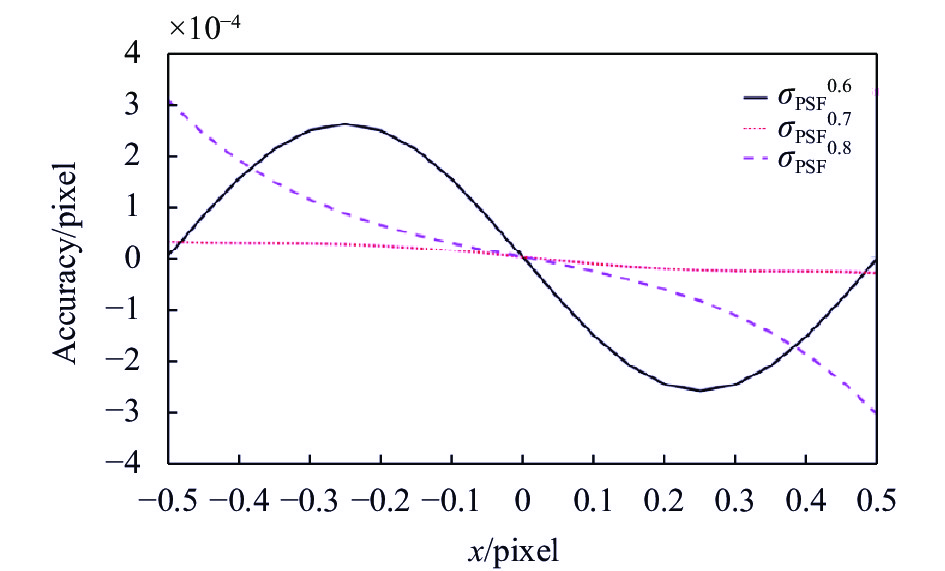
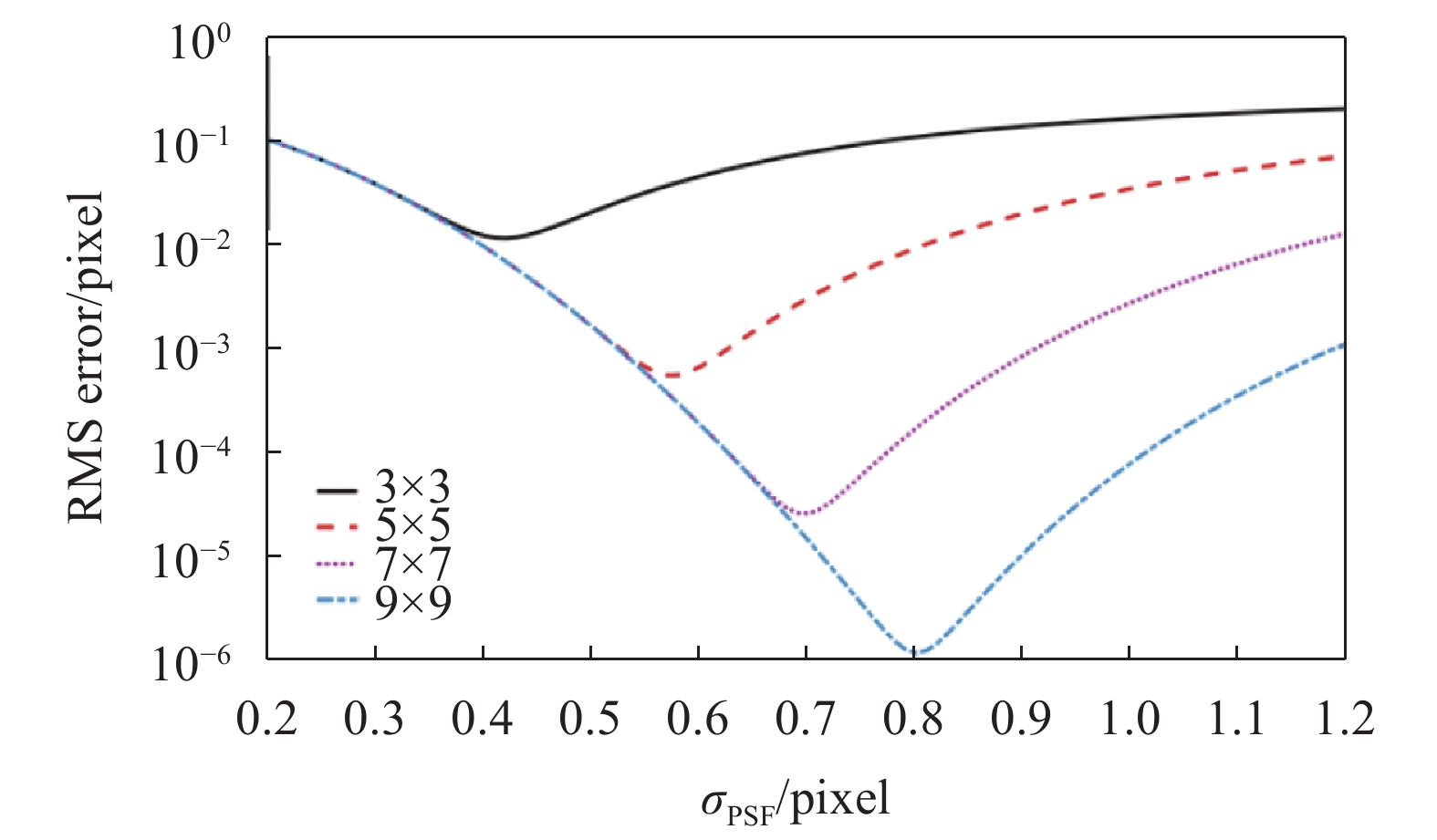
$$ {\delta _x} = \hat x - {x_0} $$ (6) 由公式(3)~公式(6)可知,当使用高斯星点模型时,星点提取精度主要与高斯半径有关,如图1所示。假设星点开窗分别为3、5、7、9,且星点位于理想中心位置处,则当星点开窗为3、高斯半径约为0.4时,星点质心提取精度最高;当星点开窗为5、高斯半径为0.57时,星点质心提取精度最高;当星点开窗为7、高斯半径为0.7时,星点质心提取精度最高;当星点开窗为9、高斯半径为0.8时,星点质心提取精度最高。然而,随着高斯半径增大,星点中心像元处能量减少,故需要更大的通光口径才能实现相同星等的恒星探测。甚高精度微型星敏感器必须兼顾信噪比、星点提取精度、光学系统口径,因此,常选择的高斯半径范围为0.6~0.8,开窗大小为7×7,其对应的3×3像元能量集中度为88%~97%。
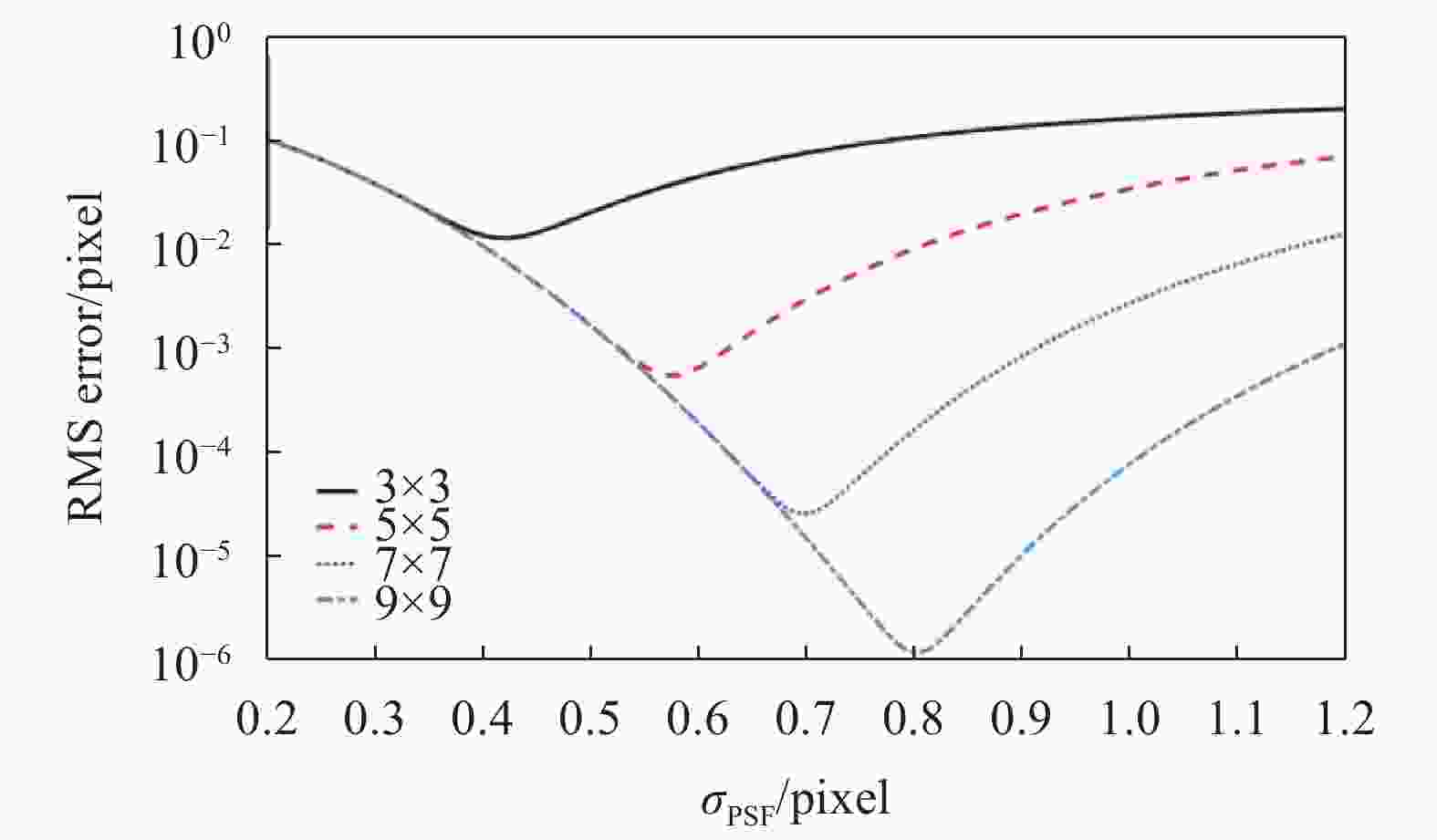
图 1 高斯半径与误差RMS值
Figure 1. Radius of Gaussian beam and error value of RMS
当高斯半径分别为0.6、0.7、0.8时,理想情况下,当星点质心位于探测器像元不同位置时的提取精度如图2所示,其值约为0.03%。在实际工程中,由于热适应性、光机装调偏差、探测器填充因子、光学系统质心偏移等因素影响,光斑细分精度一般可达0.02 pixel。
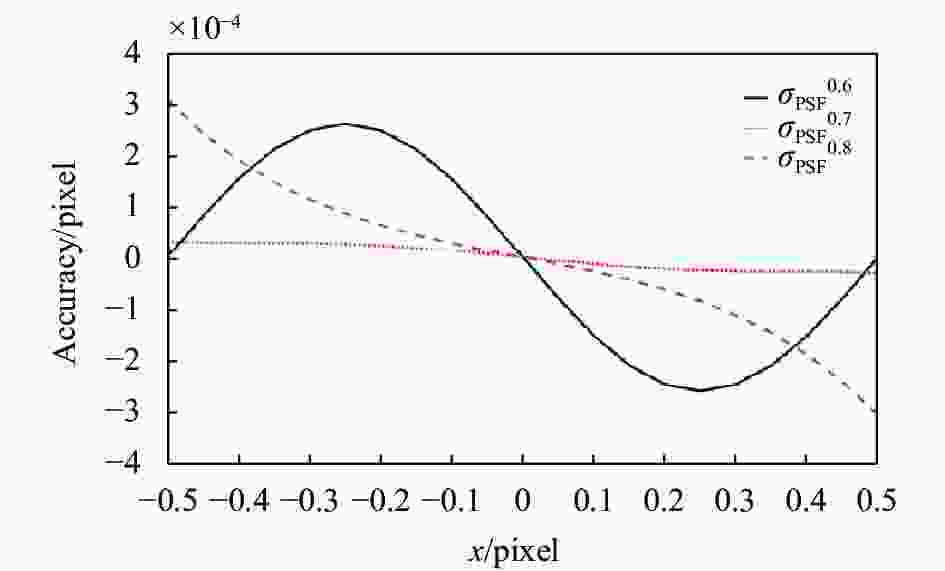
图 2 开窗7 pixel×7 pixe时星点在像元不同位置处提取精度
Figure 2. The extraction precision of pixel in different positions of 7 pixel×7 pixel
-
任意星等在某色温区间内辐照度$ {E'_2} $如公式(7)所示:
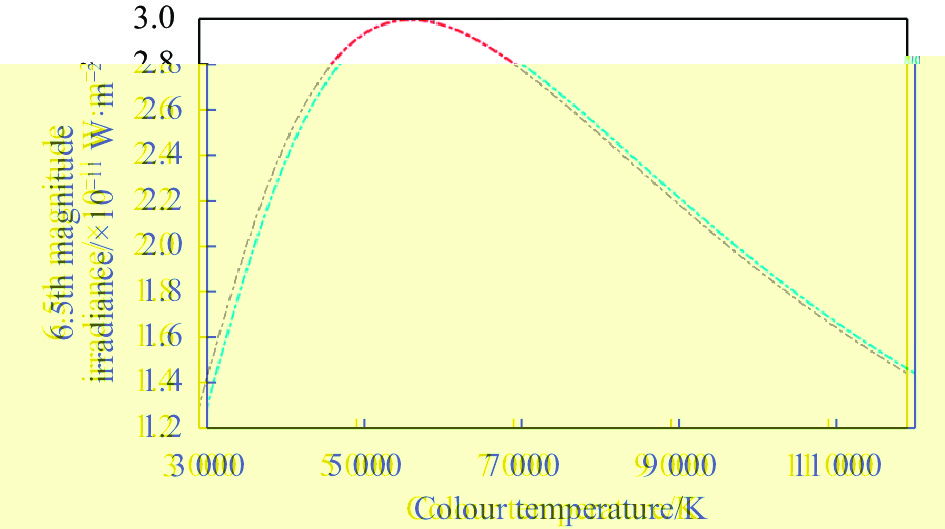
$$ \begin{split} {E'_2} =& {E_1} \times {10^{\left( {\tfrac{{{m_1} - {m_2}}}{{2.512}}} \right)}} \times \left({{\displaystyle\int_{{\lambda _1}}^{{\lambda _2}} {\dfrac{{{c_1}}}{{{\lambda ^5}}}\dfrac{1}{{\exp ({{{c_2}} \mathord{\left/ {\vphantom {{{c_2}} {\lambda T}}} \right. } {\lambda T}}) - 1}}{\rm{d}}\lambda } }} \right)\bigg/\\ & \left( {{\displaystyle\int_0^\infty {\dfrac{{{c_1}}}{{{\lambda ^5}}}\dfrac{1}{{\exp ({{{c_2}} \mathord{\left/ {\vphantom {{{c_2}} {\lambda T}}} \right. } {\lambda T}}) - 1}}{\rm{d}}\lambda } }} \right) \end{split}$$ (7) 式中:m1为太阳星等,为−26.74,对应辐照度E1为1367 $ {{\text{W}} \mathord{\left/ {\vphantom {{\text{W}} {{{\text{m}}^2}}}} \right. } {{{\text{m}}^2}}} $;m2为极限探测星等;λ为某波长;λ1为起始波长;λ2终止波长;T为色温;${c_1} = 3.741\;8 \times {10^{ - 16}}\;{\text{W}} \cdot {{\text{m}}^2}$,为第一辐射常数;${c_2} = 1.438\;8 \times {10^{ - 2}}\;{\text{m}} \cdot {\text{K}}$,为第二辐射常数;E′2为等效星等辐照度。根据公式(7),6.5等星在地球表面辐照度为7.96E-11 $ {{\text{W}} \mathord{\left/ {\vphantom {{\text{W}} {{{\text{m}}^2}}}} \right. } {{{\text{m}}^2}}} $,当波长积分区间为500~850 nm、色温区间为3000~12000 K时,辐照度约为1.3E−11~3.00E−11 $ {{\text{W}} \mathord{\left/ {\vphantom {{\text{W}} {{{\text{m}}^2}}}} \right. } {{{\text{m}}^2}}} $。选取3000 K对应辐照度为设计阈值,如图3所示。
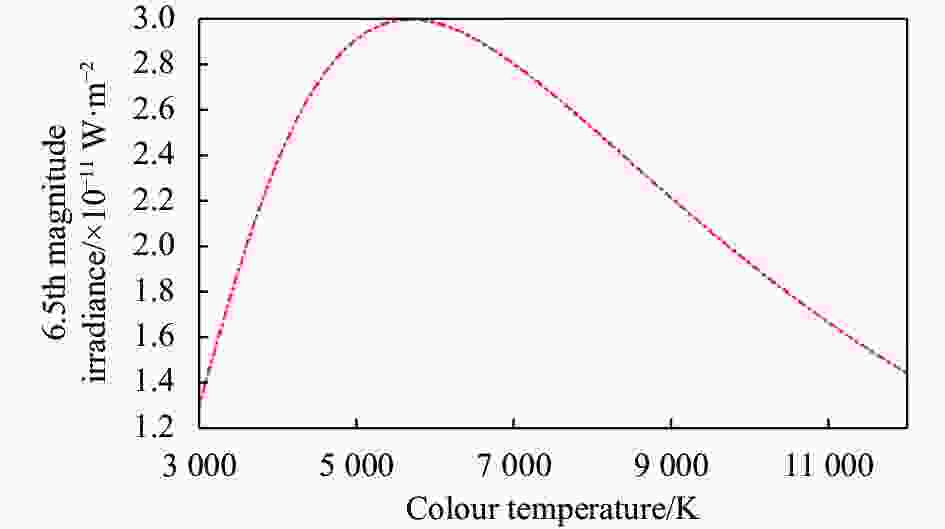
图 3 6.5等星在不同色温下辐射功率密度
Figure 3. Power density of 6.5 magnitude star under different colour temperatures
轴上星点信噪比计算如下:
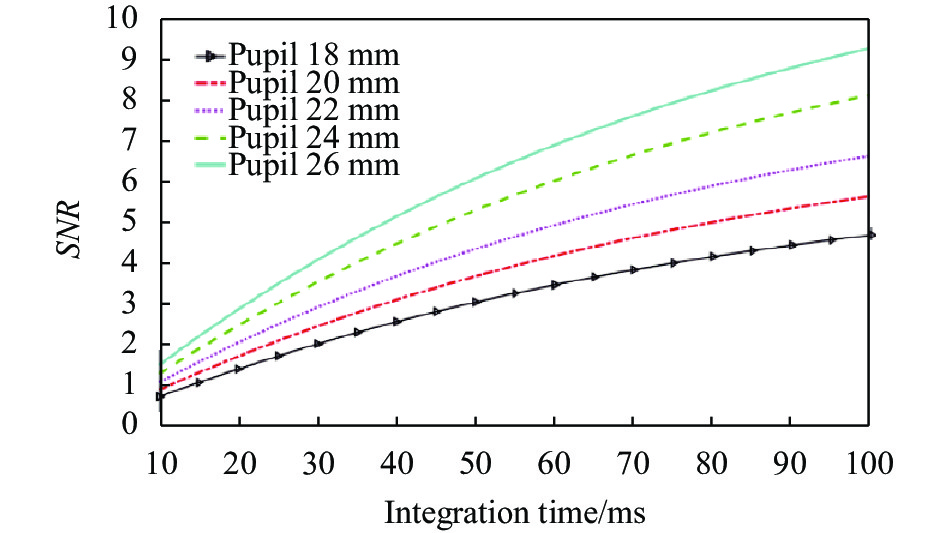
$$ \left\{ {\begin{array}{*{20}{c}} {S = t \times k \times q \times \tau \times {{E'}_2} \times \pi \times {\lambda }/ (h \times c) \times {{{D^2}} \mathord{\left/ {\vphantom {{{D^2}} 4}} \right. } 4}} \\ {S NR = {S \mathord{\left/ {\vphantom {S N}} \right. } N}} \\ {N = \sqrt {S + {\sigma ^2}_{{\rm{dark}}} + {\sigma ^2}_r + {\sigma ^2}_{{\text{nun}}} + {\sigma ^2}_{{\text{fpn}}}} } \end{array}} \right. $$ (8) 式中:S为星光产生的电子数;k为单个像元能量集中度;t为积分时间;q为量子响应效率;τ为透过率;h为普朗克常量;c为光速;λ为中心波长;D为通光口径;$S NR$为信噪比;$ {\sigma _{{\text{dark}}}} $为暗电流;$ {\sigma _{\text{r}}} $为读出噪声;$ {\sigma _{{\text{nun}}}} $为非均匀性噪声的均方值;$ {\sigma _{{\text{fpn}}}} $为固定模式噪声的均方值。经过仿真分析,积分时间与信噪比关系如图4所示,结合光学系统质量以及探测灵敏度两项因素,最终选定有效口径大小为22 mm。

图 4 不同通光口径下信噪比随积分时间的变化
Figure 4. SNR as integration time changes under different apertures
-
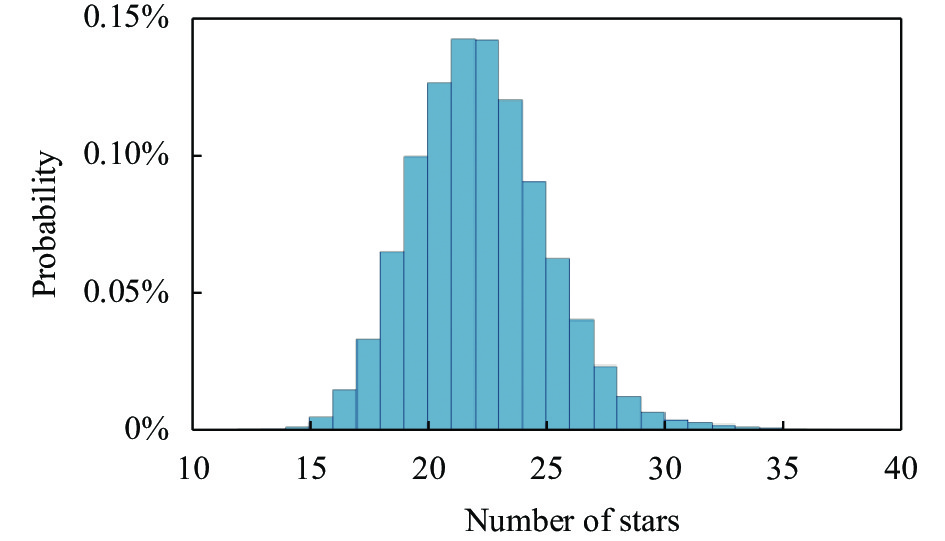
由文献[11]可知,当给定恒星星等后,视场大小与可探测恒星数量存在经验关系。然而,其尚未考虑色温以及星间角距等信息,因此直接将其作为光学系统视场的确定条件并不合适。通常情况下,需要根据星等、色温、星间角距等信息建立星库,并采用蒙特卡洛分析方法统计出某一视场下大于预设定姿星数量的概率,据此给出工作视场。由于筛选条件多,并且各个天区恒星密度不同,会导致恒星分布不均。考虑到公式(2)中描述的是峰值波长,即便某些恒星峰值波长不在要求范围内,但是该恒星仍然包含500~850 nm波段,因此在设计星库时需要根据极限星等对应的色温设定阈值,从不同色温中筛选出满足条件的恒星填充星库。经过星库仿真迭代,当工作半视场为9°时,视场内至少可探测12颗定姿星,如图5所示。
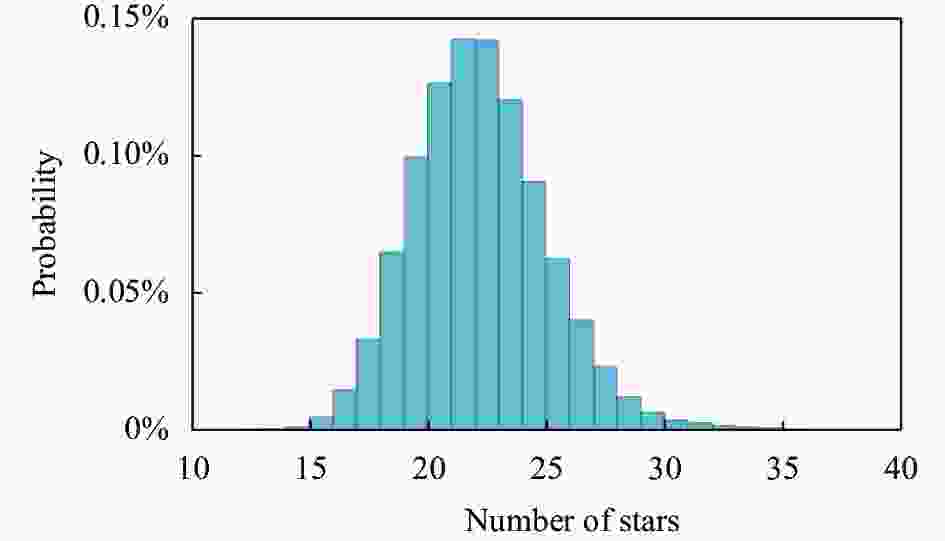
图 5 视场内定姿星数量与概率
Figure 5. Number and probability of attitude determining stars in field of view
-
在一定高斯半径范围内,星点光斑越大,星点提取算法精度越高,但同时将导致星点信噪比下降。所设计的星点弥散斑位于焦面处,利用光学系统像差较大的特点,当拍摄亮星时,星点边缘像素处可获得足够能量并参与质心提取;当拍摄暗星时,可使得星点中心附近的像素参与质心提取。综上,星敏感器光学系统设计指标如表2所示。
表 2 光学系统设计参数要求
Table 2. Requirement of optical system design parameters
Title Technical requirement Aperture/mm 22 Focal length/mm 35.53 Half field of view/(°) 9 Geometric encircled energy under
0.9 field of view and 3 pixel×3 pixel≥90% Lateral colour/μm ≤±2 Centroid distortion/μm ≤±2 Diameter variation of diffused light spot
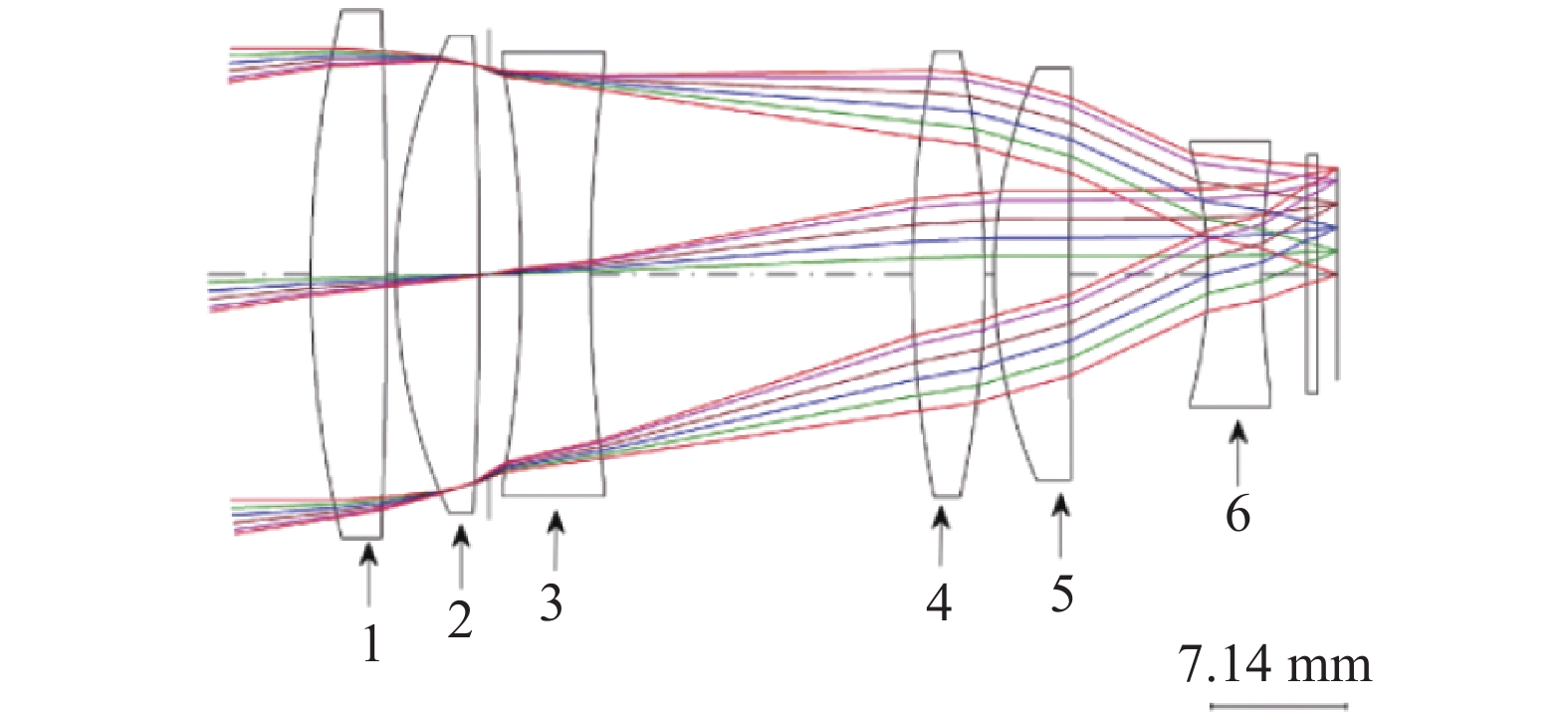
under −40 ℃ to 60 ℃/μm≤±0.5 Working wavelength/nm 500-850 宇航级星敏感器在轨工作时会受到高能粒子的影响,产生电子对效应、康普顿效应、光电效应,导致光学玻璃着色,影响透过率,降低灵敏度。为保障星敏感器在轨工作寿命,高轨长寿命光学镜片材料均应采用耐辐射材料,而中低轨道光学镜片一般是在光学系统前端加装高纯度石英平板,通常情况下该平板会与探测器像元形成反射光路,当对辐照度较高的物体(如月亮)成像时会在探测器像面上产生鬼像,因此可不在光学系统前端增加平板,而是将首片光学材料设定为石英。如图6所示,光路由六个透镜和一个探测器光学窗口组成,窗口对前面光路进行像差补偿,同时又起到防尘作用。为达到轻小型设计目标,同时保证成像质量,星敏感器光学系统的光阑通常置于前端[12-16]。光学材料为SIO2、ZF6、HZPK5。如果需要进一步提升耐辐射性能,可将ZF6更换为ZF506,经迭代后其性能基本不变。

图 6 光路图
Figure 6. Light path diagram
通常情况下,星敏感器工作温度范围为−40~60 ℃,为保证在100 ℃温差范围内星点灵敏度、弥散斑形状不发生明显变化,需要对光学系统进行无热化设计。假设光学系统由k个镜片构成,总光焦度为$ \varphi $,按照薄透镜成像理论,光焦度与热差系数T、色差系数C有如下关系:
$$ \left\{ {\begin{array}{*{20}{c}} {\varphi =\displaystyle \sum\limits_{{{i = 1}}}^k {{h_i}{\varphi _i}} } \\ {C = {{\displaystyle\sum\limits_{i = 1}^k {{h_i}^2{C_i}{\varphi _i}} } \mathord{\left/ {\vphantom {{\sum\limits_{i = 1}^k {{h_i}^2{C_i}{\varphi _i}} } \varphi }} \right. } \varphi }} \\ {T = {{\displaystyle\sum\limits_{i = 1}^k {{h_i}^2{T_i}{\varphi _i}} } \mathord{\left/ {\vphantom {{\sum\limits_{i = 1}^k {{h_i}^2{T_i}{\varphi _i}} } \varphi }} \right. } \varphi }} \end{array}} \right. $$ (9) 式中:$ {h_i} $为第i个透镜上近轴光线的归一化入射高度;$ {\varphi _i} $为各个透镜光焦度;$ {C_i} $为各个透镜色差系数;$ {T_i} $为各个透镜热差系数。一方面,光学系统的色差仅与光学材料的属性有关,与机械材料的属性无关,为达到消色差的目的,C应取0;另一方面,光学系统热差包含光学热差和机械热差,为满足消热条件,应使得$ T = - {T_m} $。因此,为了消除热差,需要充分结合镜片与机械材料属性,以达到无热化目的。考虑到低成本、轻量化等因素,镜头结构可选择铝合金材料,其在20 ℃的热膨胀系数约为23.21E-6/K。
-
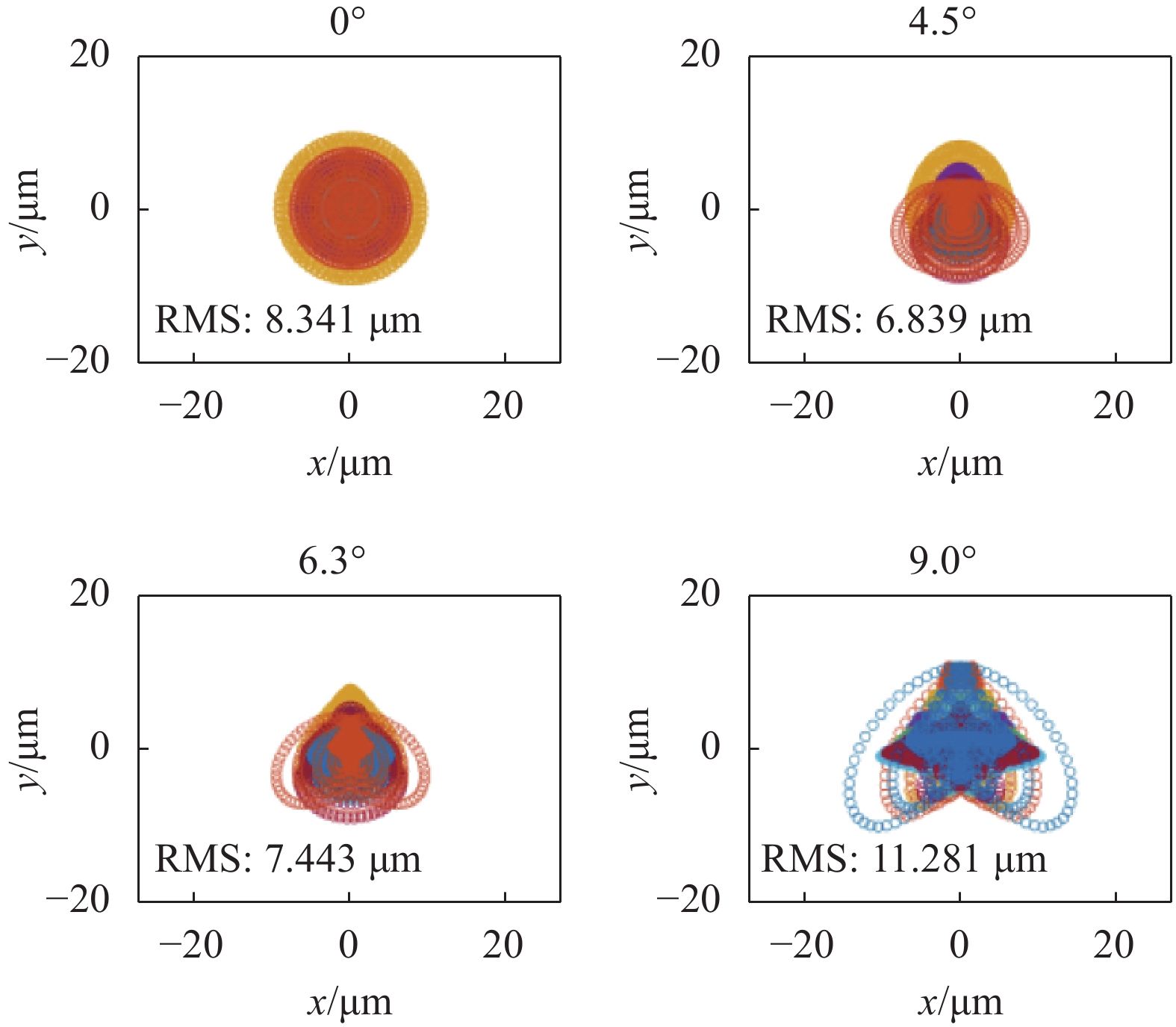
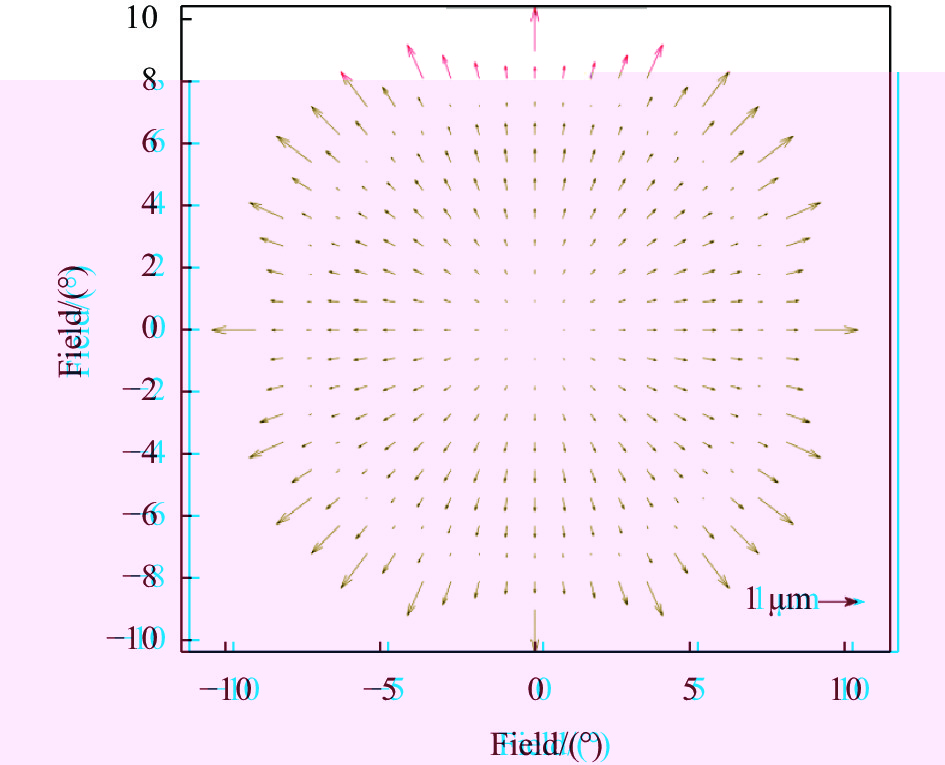
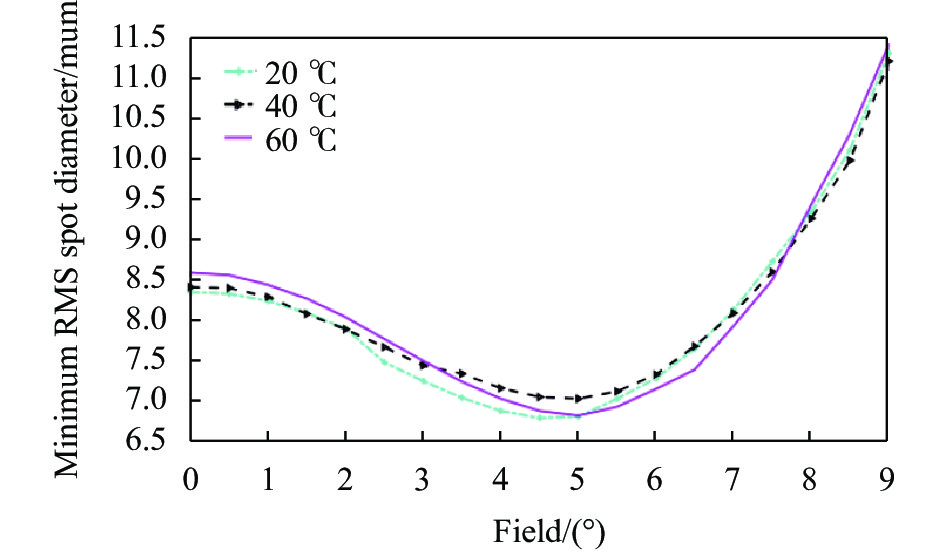
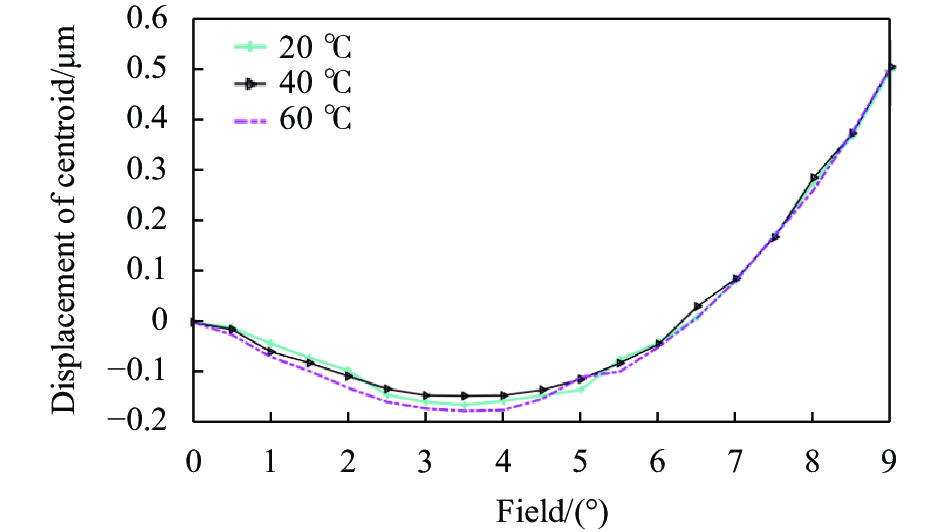
像质分析如图7~图12所示。全视场弥散斑RMS偏差小于一个像素,弥散斑接近于圆,边缘视场处弥散斑最大,其值为11.281 μm;质心畸变最大值为1 μm;0.9视场处3 pixel×3 pixel内能量集中度不低于90%;全视场倍率色差小于1.5 μm。当采样点温度为−40 ℃和60 ℃时,弥散斑尺寸在该范围内变化量小于1 μm,由于弥散斑RMS尺寸和能量集中度有关联,等效为该温度区间内能量集中度几乎不变;弥散斑质心偏移小于0.05 μm。以上分析结果均满足设计指标要求。

图 7 点列图
Figure 7. Spot diagrams
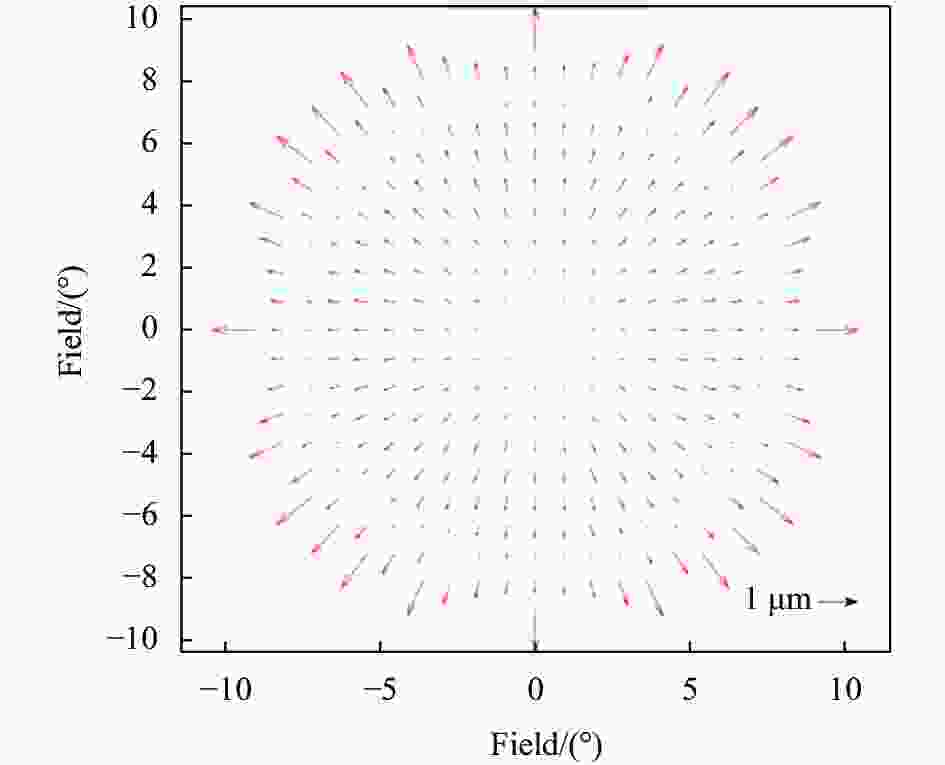
图 8 质心畸变
Figure 8. Distortion of centroid
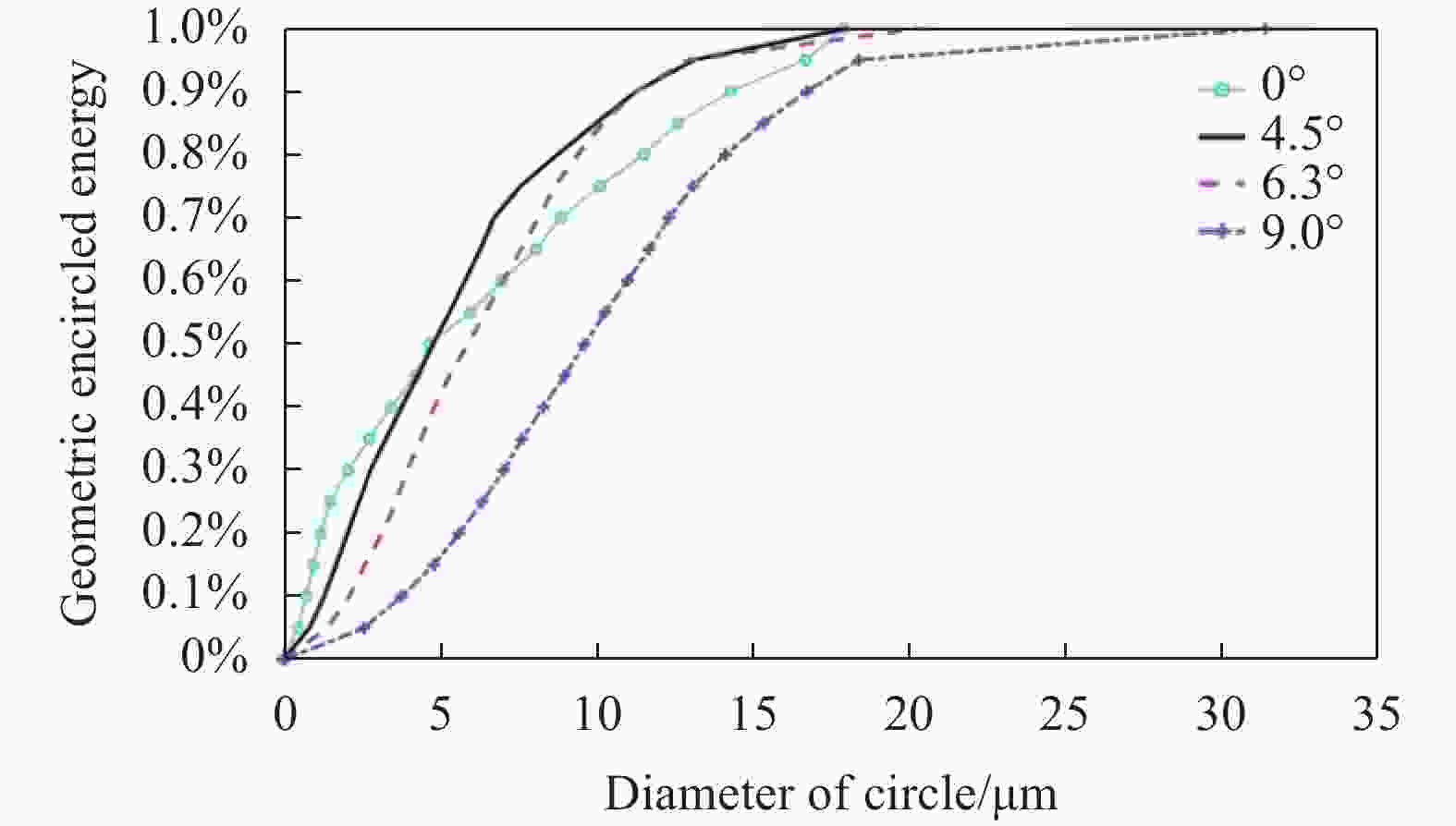
图 9 能量集中度
Figure 9. Geometric encircled energy
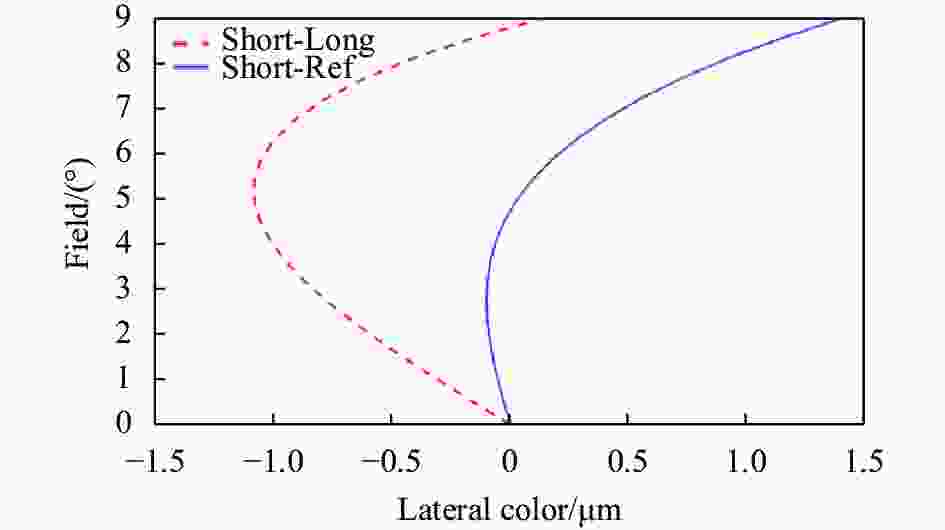
图 10 倍率色差
Figure 10. Lateral color

图 11 弥散斑尺寸随视场变化
Figure 11. RMS of spot diameter as field of view changes

图 12 弥散斑质心随视场偏移
Figure 12. Centroid shift of diffused light spot as field of view changes
-
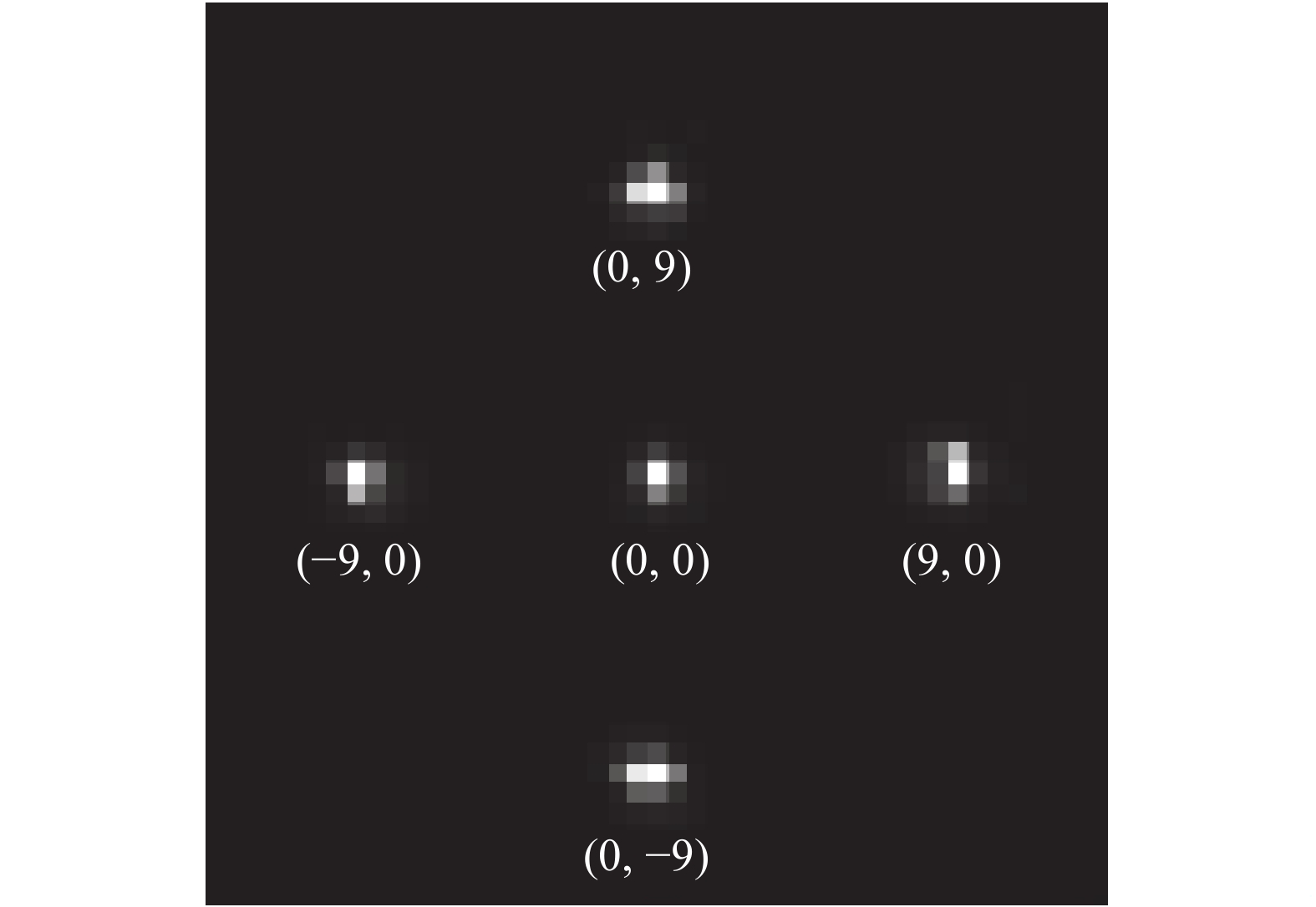
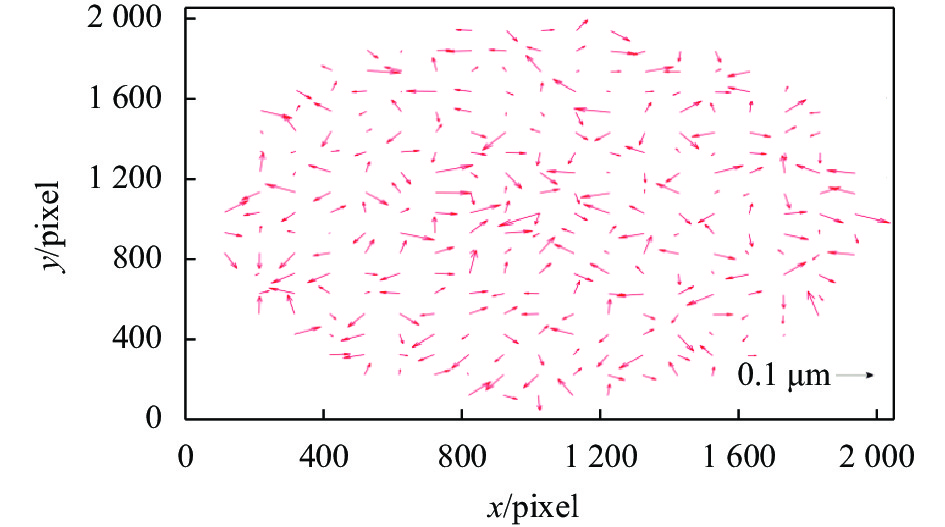
采用图13所示的设备对甚高精度微型星敏感器进行后工作距调试以及常压标定,包括单星模拟器和三轴转台。其中,单星模拟器的星等范围为1.0~6.0等星,星等模拟精度为±0.2等星,单星张角优于1″。中心视场和边缘视场处星点如图14所示,星点能量集中度较高,且对称性较好;标定残差分布情况如图15所示,标定后的系统畸变残差最大值不超过0.1 μm,且标定精度为0.6″。

图 13 精度测试设备
Figure 13. Accuracy test equipment
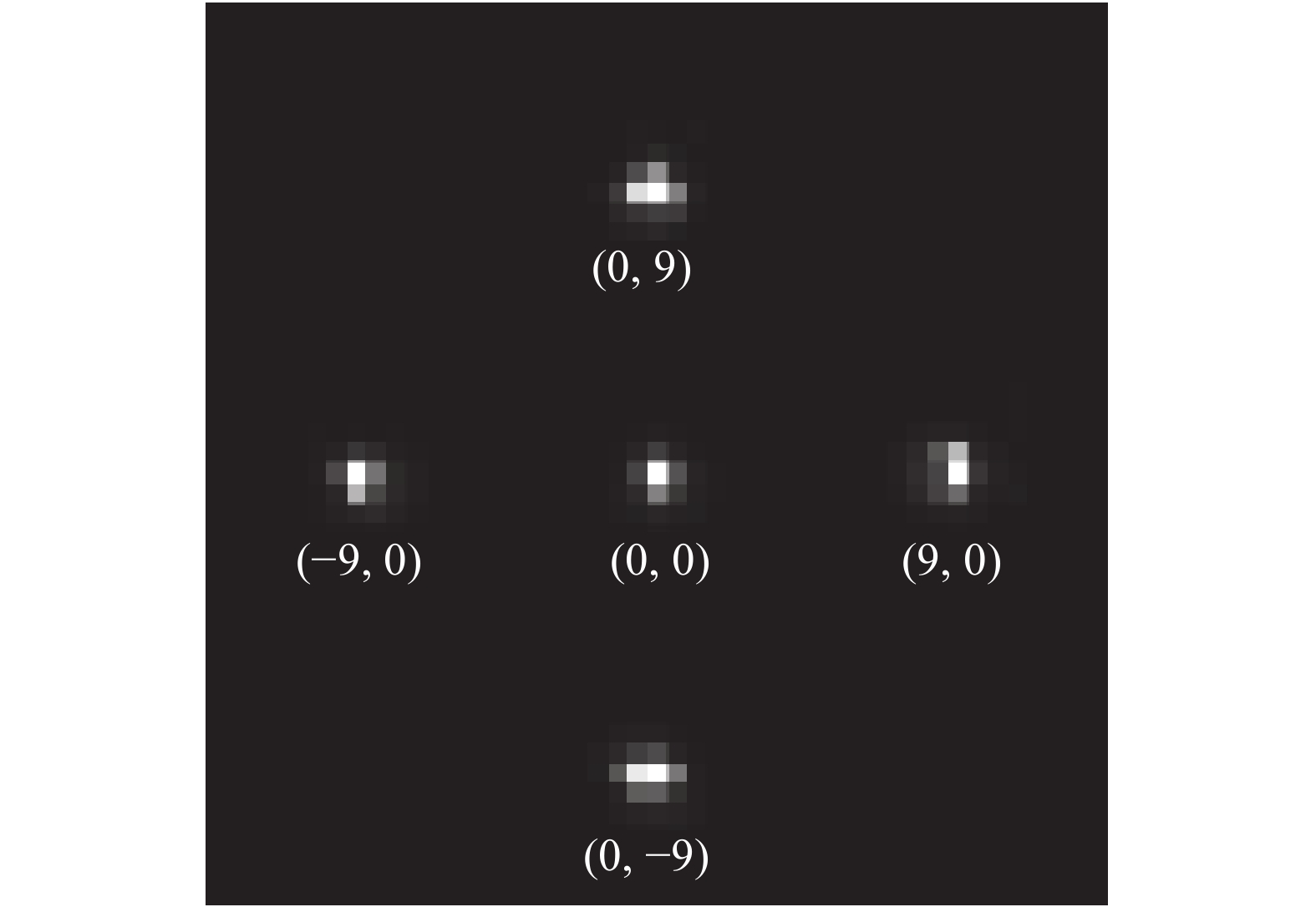
图 14 成像光斑
Figure 14. Imaging spot

图 15 标定残差分布图
Figure 15. Distribution of calibration residual error
-
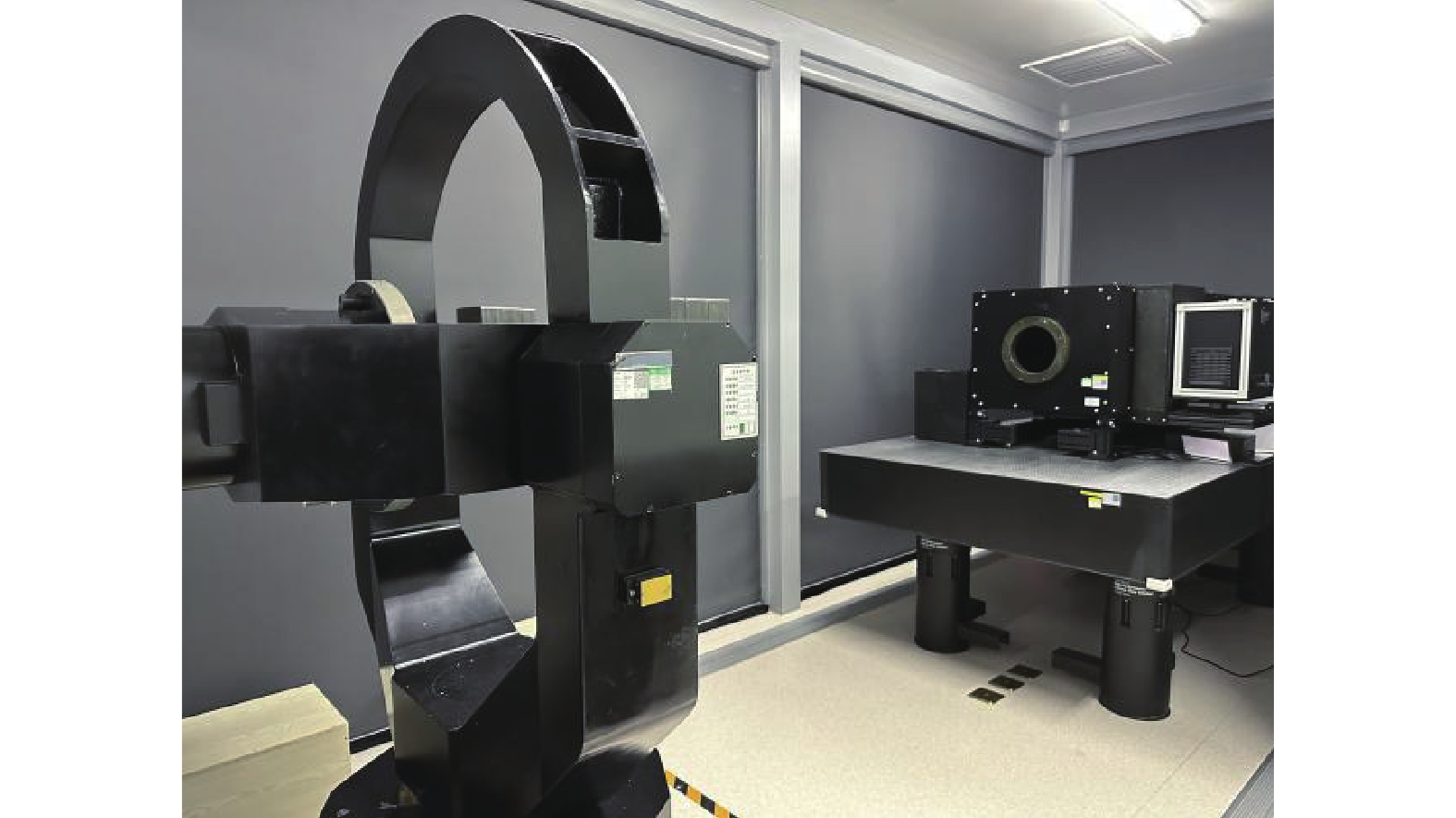
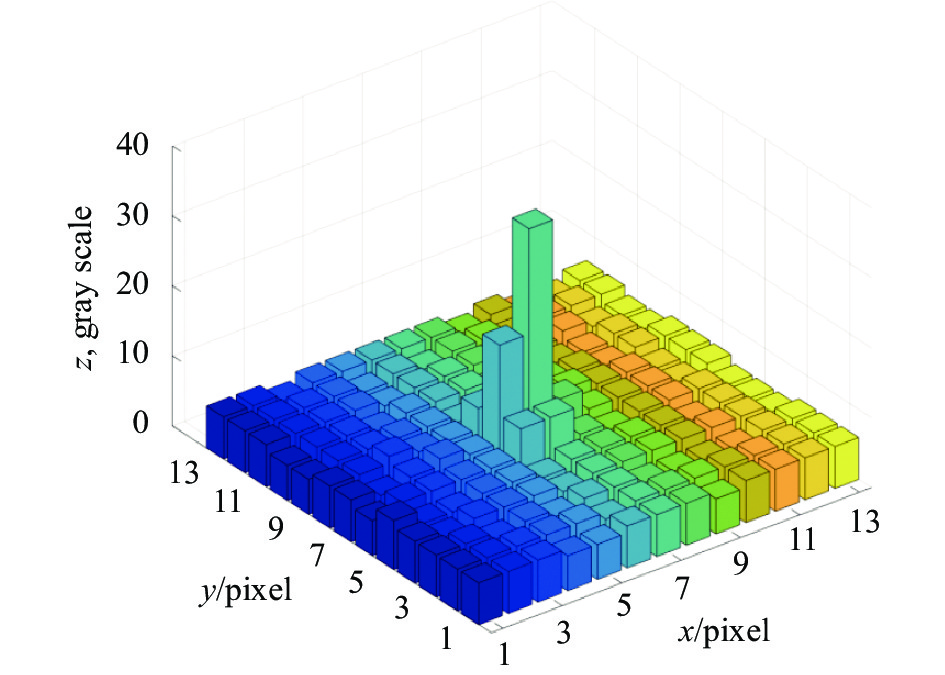
外场观星测试主要验证甚高精度微型星敏感器测量精度以及可探测极限星等,其采用的测试设备如图16所示。甚高精度微型星敏感器包络尺寸为71 mm×71 mm×131.3 mm,质量320 g,在测试时可以通过工装将多台星敏感器固定在转台上。需进一步说明的是,测试过程中不考核星敏感器动态性能,双轴转台仅起到固定作用。测试精度结果如图17所示,除个别点(由震动、气流等因素所导致)外,x轴和y轴测量精度均小于1.5″。探测的极限星点如图18所示,其恒星为ID29450,星等为6.51等星,峰值灰度值为35,背景灰度均值为6.12,背景灰度标准差为6.6,星点信噪比为4.37。

图 16 外场观星现场图
Figure 16. Scene of out-field stargazing

图 17 测量精度结果
Figure 17. Results of measurement accuracy

图 18 6.51等星灰度分布
Figure 18. Gray-level distribution of 6.51 magnitude star
-
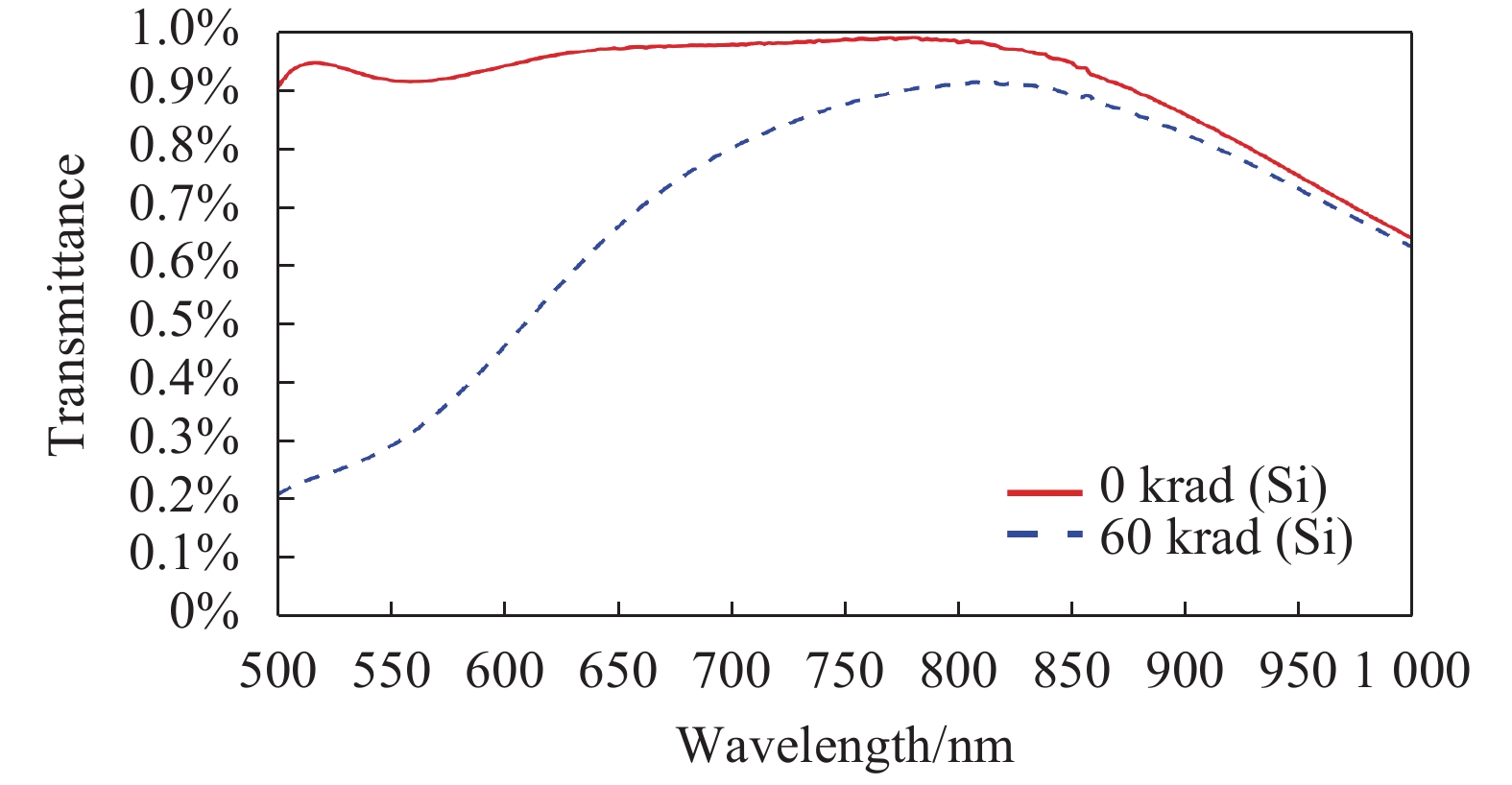
为检验光学镜头的空间辐射适应性,将该光学系统进行γ照射,剂量率为1 rad(Si)/s,累积量为60 krad(Si),然后利用分光光度计进行透过率测试。耐辐射试验数据如图19所示,未受辐照时,镜头在工作波段内的平均透过率为95.5%;累计60 krad(Si)辐照后,镜头在工作波段内的平均透过率下降至65%。此外,镜头透过率在500~750 nm区间下降的最快,而在750~1000 nm区间改变的较小。耐辐射测试后再次观星,探测的极限星点如图20所示,恒星为ID8998,星等为6.01等星,峰值灰度值为23,背景灰度均值为6.12,背景灰度标准差为6.53,星点信噪比为2.58。

图 19 辐照前后透过率变化曲线
Figure 19. Variation curve of transmittance before and after irradiation
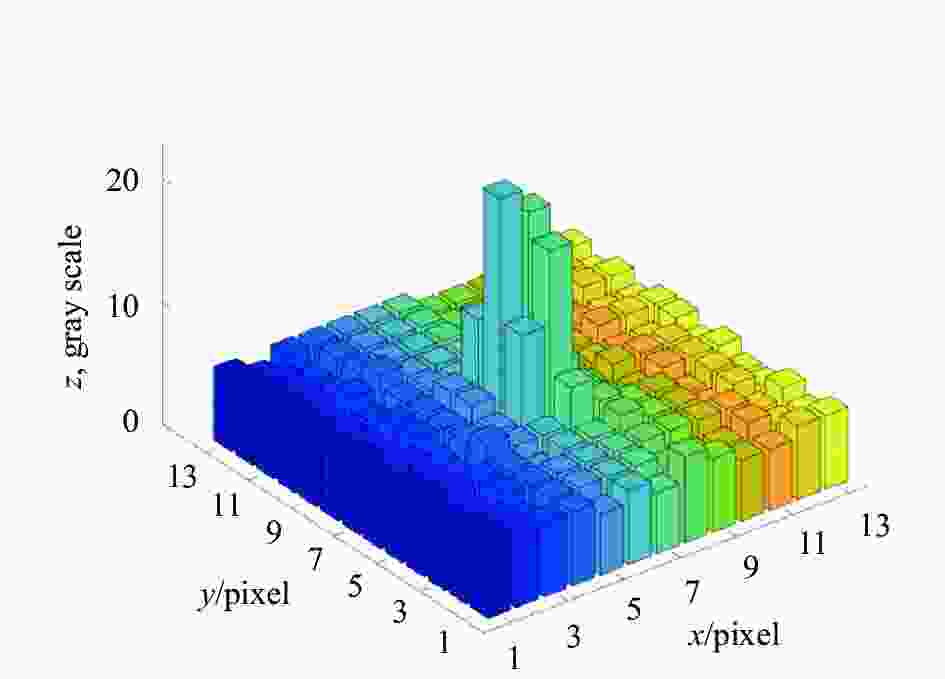
图 20 6.01等星灰度分布
Figure 20. Gray-level distribution of 6.01 magnitude star
-
文中针对甚高精度微型星敏感器开展光学系统设计与验证研究。基于光学材料属性,筛选了系统工作波段;基于星点分布特性,确定了弥散高斯半径;基于蒙特卡洛分析方法,同时考虑恒星能量大小,选定了光学系统视场。基于指标分析方法,完成了光学系统设计,仿真结果表明:在−40~60 ℃工作温度区间内,星点质心偏移小于0.05 μm,弥散斑尺寸变化小于1 μm,质心畸变小于1 μm,0.9视场处3 pixel×3 pixel内能量集中度达到90%。此外,采用标定测试、外场观星、耐辐照测试对光学系统能力进行考核,结果表明:标定精度达到0.6″,测量精度达到1.5″(3σ),外场测试极限灵敏度为6.51等星,累计60 krad(Si)辐射后,极限灵敏度为6.01等星。文中关于光学系统指标分析方法、光学系统设计方法以及测试验证方法可为其他光电类敏感器提供一定参考。
Design and verification of optical system on very high-precision and miniature star sensor
-
摘要: 面向甚高精度微型星敏感器在商业卫星以及中低轨资源勘探卫星的实际应用需求,开展了甚高精度微型星敏感器光学系统设计与验证研究。基于甚高精度微型星敏感器姿态测量精度要求,完成了光学系统技术指标论证工作,具体包括:根据材料透过率与折射率,给出了适用于轻小化镜头的工作波段;根据恒星像点的弥散特性,给出了适用于高精度质心提取的高斯半径;根据黑体辐射定律与探测器参数,给出了适用于提取6.5等星时所需通光口径;根据恒星色温与星等之间的关系,并结合蒙特卡洛方法,给出了最佳工作视场大小。基于光学系统指标论证方法,确定了光学系统设计参数,并依次实现了光路设计以及像质分析,结果表明:在−40~60 ℃工作温度区间内,其星点质心偏移不超过0.05 μm,且弥散斑尺寸变化量不大于1 μm。基于设计甚高精度微型星敏感器光学系统,开展了标定测试、外场观星以及耐辐射测试,结果表明:系统标定精度为0.6″,外场测量精度为1.5″(3σ),外场测量下可探测极限星等为6.51等星,累计60 krad(Si)辐射下可探测极限星等为6.01等星,进一步验证了所设计光学系统的精度以及可靠性,可为甚高精度微型星敏感器的工程应用提供理论基础与技术支持。Abstract:
Objective Very high-precision and miniature star sensor is applied to LEO or MEO satellites for resource exploration and commercial uses. It has characteristics of high accuracy, light weight, small volume, high reliability and short production cycle. To fulfill the design objectives according to the above mentioned characteristics, technical indicators requirements should be researched in the development phase. The existing literatures regarding the optical system design of star sensors determine the effective aperture commonly based on noise and the observed stars, and estimate working field through magnitude and star number. However, the information of color temperature and star database is lacked in the analysis of these literatures, which causes the deviation of analysis result and engineering practice. Also, the verification is less pointing at the encircled energy of diffused light spot and working band. The paper aims to study the key optical specifications of very high-precision and miniature star sensors, and to verify the indicators based on the characteristics of optical material and star point extraction algorithm. Methods Taking measurement accuracy of the star sensor as breakthrough point, the paper demonstrates the verification of technical indicators of the optical system. The color temperature information of stars is presented based on the revised HipJ2000 star catalogue (Tab.1). Combining the manual of CDGM, the impacts on the absorptivity and refractivity of material in different wavelengths are analyzed and the operating band for light and small optics is confirmed accordingly. Based on the mathematical model of diffused light spot, the relationship between the accuracy and the radius of Gaussian beam is analyzed. And based on the light design features, the radius of Gaussian beam for centroid extraction of high accuracy is obtained (Fig.1-2). In view of the theoretical analysis of blackbody radiation law (Fig.3) and the given detector, the sensitivity of the system is analyzed and the aperture for extracting 6.5 magnitude star under different integration time is determined (Fig.4). According to the relationship between color temperature and star magnitude in Hipparcos catalogue, the working field of view of the star sensor is fixed by analyzing Monte Carlo method (Fig.5). The design indicators of the optical system for very high-precision and miniature star sensor is determined (Tab.2). Results and Discussions The design of optical system is based on the requirement of design parameters in Tab.2. The optical lens is composed of six optics (Fig.6). To adapting to spacial environment, the first optic uses SiO2 material, and the other optics uses ZF6, HZPK5 material. To further enhance the anti-radiation performance of the optical system, ZF6 material could be replaced by ZF506 material. The RMS deviation of diffused light spot is less than one pixel in full field of view, and the diffused light spot is close to circle with the biggest 11.281 μm at the edge of the field of view (Fig.7). The maximum centroid distortion is 1 μm (Fig.8). The geometric encircled energy under 0.9 field of view and 3 pixel×3 pixel is more than 90% (Fig.9). The lateral color of full field of view is less than 1.5 μm (Fig.10). Athermalization analysis is executed on the optical lens, and the sampling point is in steady state under temperature of −40 ℃ to 60 ℃. The variation of dimension of diffused light spot is less than 1 μm. Due to the relationship between RMS dimension and encircled energy, there is almost no change of encircled energy within this temperature range (Fig.11). Centroid shift of the diffused light spot is less than 0.05 μm (Fig.12). All design results conform with the standard in Tab.2. In the last part of the paper, the accuracy and reliability of the optical system is verified through calibration, out-field stargazing and anti-radiation test. According to the data calibration, by using the optical system in this paper, the calibration accuracy of 0.6″ (Fig.15) and measurement accuracy of 1.5″(3$ \sigma $)(Fig.17), could be realized. The limit detection of the star sensor is 6.51 magnitude star (Fig.18). After cumulative radiation of 60 krad (Si), 6.01 magnitude star could be detected (Fig.19-20). Conclusions The measured data indicates that the analysis method of system indicators in this paper is effective. The optical system could be designed to extract stellar attitude of high accuracy. The analysis scheme of technical specifications of the optical mechanical system mentioned in this paper, the design method of optical system, as well as the measured data could be used as a reference for other photoelectric sensor designs. -
Key words:
- star sensor /
- optical system /
- very high-precision accuracy /
- athermal /
- radiation resistant
-
图 2 开窗7 pixel×7 pixe时星点在像元不同位置处提取精度
Figure 2. The extraction precision of pixel in different positions of 7 pixel×7 pixel
图 3 6.5等星在不同色温下辐射功率密度
Figure 3. Power density of 6.5 magnitude star under different colour temperatures
图 4 不同通光口径下信噪比随积分时间的变化
Figure 4. SNR as integration time changes under different apertures
图 5 视场内定姿星数量与概率
Figure 5. Number and probability of attitude determining stars in field of view
图 12 弥散斑质心随视场偏移
Figure 12. Centroid shift of diffused light spot as field of view changes
图 19 辐照前后透过率变化曲线
Figure 19. Variation curve of transmittance before and after irradiation
表 1 HipJ2000星表
Table 1. HipJ2000 star catalogue
Spectrum Color
temperature/KPeak
wavelength/nmStars
(number)O Greater than 30000 Lower than 96.6 50 B 10000-30000 96.9-289.8 1262 A 7500-10000 289.8-386.4 1729 F 6000-7500 386.4-483 1190 G 5000-6000 483-579.6 1131 K 3500-5000 579.6-828 2469 M 2000-3500 828-1449 517  下载: 导出CSV
下载: 导出CSV
表 2 光学系统设计参数要求
Table 2. Requirement of optical system design parameters
Title Technical requirement Aperture/mm 22 Focal length/mm 35.53 Half field of view/(°) 9 Geometric encircled energy under
0.9 field of view and 3 pixel×3 pixel≥90% Lateral colour/μm ≤±2 Centroid distortion/μm ≤±2 Diameter variation of diffused light spot
under −40 ℃ to 60 ℃/μm≤±0.5 Working wavelength/nm 500-850
下载: 导出CSV
-
[1] 王循, 谢运强, 刘春雨, 等. 大视场低畸变的星敏感器光学系统设计[J]. 机电工程技术, 2021, 50(06): 22-25. doi: 10.3969/j.issn.1009-9492.2021.06.006 Wang Xun, Xie Yunqiang, Liu Chunyu, et al. Design of star sensor optical system with large field of view and low distortion [J]. Mechanical & Electrical Engineering Technology, 2021, 50(6): 22-25. (in Chinese) doi: 10.3969/j.issn.1009-9492.2021.06.006 [2] 孟祥月, 王洋, 张磊, 等. 大相对孔径宽光谱星敏感器光学镜头设计[J]. 红外与激光工程, 2019, 48(07): 190-197. Meng Xiangyue, Wang Yang, Zhang Lei, et al. Lens design of star sensor with large relative aperture and wide spectral range [J]. Infrared and Laser Engineering, 2019, 48(7): 0718005. (in Chinese) [3] 朱杨, 张忛, 宋莹, 等. 用于高精度卫星姿态测量的大相对孔径高杂光抑制比星敏感器光学设计[J]. 仪器仪表学报, 2021, 42(11): 1-9. Zhu Yang, Zhang Fan, Song Ying, et al. Optical design of large relative aperture and high stray light suppression ratio star sensor for high precision satellite attitude measurement [J]. Chinese Journal of Scientific Instrument, 2021, 42(11): 1-9. (in Chinese) [4] 伍雁雄, 王丽萍. 小型化宽谱段星敏感器光学系统设计[J]. 应用光学, 2021, 42(05): 782-789. doi: 10.5768/JAO202142.0501004 Wu Yanxiong, Wang Liping. Optical system of star sensor with miniaturization and wide spectral band [J]. Journal of Applied Optics, 2021, 42(5): 782-789. (in Chinese) doi: 10.5768/JAO202142.0501004 [5] 王海涌, 周文睿, 林浩宇, 等. 静态像点高斯灰度扩散模型参数估计方法[J]. 光学学报, 2012, 32(03): 275-280. Wang Haiyong, Zhou Wenrui, Lin Haoyu, et al. Parameter estimation of gaussian gray diffusion model of satic image spot [J]. Acta Optica Sinica, 2012, 32(3): 0323004. (in Chinese) [6] 王海涌, 费峥红, 王新龙. 基于高斯分布的星像点精确模拟及质心计算[J]. 光学精密工程, 2009, 17(07): 1672-1677. doi: 10.3321/j.issn:1004-924X.2009.07.028 Wang Haiyong, Fei Zhenghong, Wang Xinlong. Precise simulation of star spots and centroid calculation based on Gaussian distribution [J]. Optics and Precision Engineering, 2009, 17(7): 1672-1677. (in Chinese) doi: 10.3321/j.issn:1004-924X.2009.07.028 [7] 贾辉. 高精度星敏感器星点提取与星图识别研究[D]. 长沙: 国防科学技术大学, 2010. Jia Hui. Star centroid estimation and star identification of high accuracy star tracker[D]. Changsha: National University of Defense Technology, 2010. (in Chinese) [8] 贾辉, 杨建坤, 李修建, 等. 星敏感器高精度星点提取系统误差分析及补偿方法研究[J]. 中国科学技术科学, 2011, 41(01): 69-76. Jia Hui, Yang Jiankun, Li Xiujian, et al. Systematic error analysis and compensation for high accuracy star centroid estimation of star tracker [J]. Sci China Tech Sci, 2011, 41(1): 69-76. (in Chinese) [9] 伍雁雄. 高精度星敏感器若干关键技术研究[D]. 长春: 中国科学院大学, 2015. Wu Yanxiong. Study on key technologies for high-accuracy star sensor[D]. Changchun: University of Chinese Academy of Sciences (Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences), 2015. (in Chinese) [10] 练达, 周琦, 余路伟, 等. 高动态条件下星点像斑建模与补偿[J]. 飞控与探测, 2020, 3(03): 86-94. Lian Da, Zhou Qi, Yu Luwei, et al. Modeling and compensation of star spot in high dynamic condition [J]. Flight Control & Detection, 2020, 3(3): 86-94. (in Chinese) [11] 张前程, 钟胜, 吕劲松, 等. 大视场全天时星敏感器光学系统设计[J]. 红外与激光工程, 2023, 52(03): 234-242. Zhang Qiancheng, Zhong Sheng, Lv Jinsong. Optical system design of all-time star sensor with large field-of-view [J]. Infrared and Laser Engineering, 2023, 52(3): 20220583. (in Chinese) [12] Du Weifeng, Wang Yanqing, Zheng Xunjiang, et al. Design and verification of stray light suppression for star sensor [J]. Acta Optica Sinica, 2023, 43(6): 0623001. (in Chinese) [13] 迟金鹏, 张红鑫, 王晓东, 等. Lyot星冕仪光学系统及杂散光抑制[J]. 光学精密工程, 2022, 30(17): 2050-2057. doi: 10.37188/OPE.20223017.2050 Chi Jinpeng, Zhang Hongxin, Wang Xiaodong, et al. Optical system and stray light suppression of Lyot coronagraph [J]. Optical Precision Engineering, 2022, 30(17): 2050-2057. (in Chinese) doi: 10.37188/OPE.20223017.2050 [14] 汪洪源, 郑循江, 颜志强. 星敏感器遮光罩消光比定量测试及数据处理方法[J]. 飞控与探测, 2020, 3(05): 1-8. Wang Hongyuan, Zheng Xunjiang, Yan Zhiqiang. Quantitative testing and data processing for the extinction ratio of the star sensor hood [J]. Flight Control & Detection, 2020, 3(5): 1-8. (in Chinese) [15] 闫昊昱, 王虎, 薛要克, 等. 大视场红外星敏感器折反式光学系统设计[J]. 飞控与探测, 2022, 5(05): 12-18. Yan Haoyu, Wang Hu, Xue Yaoke, et al. Design of a catadioptric system for infrared star sensor with wide field of view [J]. Flight Control & Detection, 2022, 5(5): 12-18. (in Chinese) [16] 唐晗, 郑万祥, 曾兴容, 等. 紧凑低成本非制冷长波红外连续变焦光学设计[J]. 红外与激光工程, 2023, 52(04): 190-200. Tan Han, Zheng Wanxiang, Zeng Xingrong, et al. Compact and low-cost uncooled LWIR continuous zoom optical design [J]. Infrared and Laser Engineering, 2023, 52(4): 20220607. (in Chinese) -

 点击查看大图
点击查看大图
计量
- 文章访问数: 58
- HTML全文浏览量: 18
- PDF下载量: 23
- 被引次数: 0

