







-
全波形激光雷达(Light Detection and Ranging, LiDAR)可以获取三维点云及全波形,被广泛应用于地形测绘[1-2]、电力线检测[3-4]及海陆分类岸线提取[5-6]等领域。机载激光雷达数据分类是为每个点指定一个类别标签,是激光雷达数据后处理的重要环节。研究表明,全波形形状与目标物理特性密切相关,例如,倾斜表面的光路变长导致回波脉宽展宽[7],目标的粗糙度或颜色不同导致反射率不同进而影响回波功率[8],激光的穿透性为波形带来丰富的垂直结构信息等。而点云描述了目标的三维形状,却无法反映上述全波形的特性。因此,在分类时充分考虑全波形蕴含的目标物理特性和点云几何特征,有助于提升数据分类精度。
目前,典型的分类方法大多专注于点云数据[9-13]。这些方法通过多层感知机和卷积等深度学习算法,提取了点云的几何结构特征,但是却忽略了全波形中丰富的目标物理特性和垂直结构信息,且对邻域内点间的几何和语义相关性的挖掘也不够充分。近年来,一些研究人员也提出了同时考虑到点云与全波形的分类方法,其中Zoriz S等[14]将通过卷积生成的类概率向量与高度信息串联,投影到二维图像进行分类,但是该方法会丢失空间信息,从而会降低数据分辨率。Shinohara T等[15]提出FWNet (Full-waveform Network)和FWNet2[16]直接将点云和全波形串联进行卷积,没有考虑到全波形的时序性和目标的物理特性,无法提取点云与全波形的相关性。并且FWNet2[16]通过复杂的决策融合得到分类结果,无法全面考虑两部分特征。
针对上述问题,文中搭建了一种基于目标物理特性和几何特征的分类算法。首先,文中构建了特征融合(Feature Fusion, FF)模块,通过全波形特征提取(Full-waveform Feature Extraction, FW)模块对相邻和长距时间位置特征进行提取,充分挖掘全波形的时序性,进一步地,根据全波形和点云在目标物理特性上的关联,构建了双低秩矩阵以学习全波形和点云几何特征间的相关性,实现了特征级融合。其次,构建了邻域特征增强(Local Feature Enhancemen, LE)模块,其中邻域相关性挖掘(Local Interrelation mining, LI)模块通过局部全连接结构提取点对间的几何和语义相关性,挖掘了邻域的几何结构信息,并通过注意力池化聚合邻域特征。最后,将构建的FF和LE模块嵌入层次化的编解码结构,以融合多感受野的特征,从而构建了基于特征级融合的端到端分类网络。
-
根据激光雷达能量公式,假设入射能量均匀散射成固体角为Ω的圆锥,接收激光能量[17]可表示为:
$$ {P}_{r}=\frac{{P}_{t}{D}_{r}^{2}}{4\pi {R}^{4}{\alpha }^{2}}\sigma $$ (1) $$ \sigma =\frac{4\pi }{{\varOmega }}\rho {A}_{s} $$ (2) 式中:Pt为传输功率;Dr为接收器孔径;R为目标距离;α为激光光束发散角;σ为后向散射截面;As为目标散射面积;ρ为目标反射率。由上述公式可知,激光散射能量与目标反射率成正比,记${\sigma }_{i}=\dfrac{4\pi }{{\varOmega }}{A}_{s}$,则有:
$$ {P}_{r}=\frac{{P}_{t}{D}_{r}^{2}\rho }{4\pi {R}^{4}{\alpha }^{2}}{\sigma }_{i} $$ (3) 由于发射波形呈高斯函数状,假设目标的后向散射各向同性,即可采用广义高斯函数描述目标回波。又因为机载激光雷达地物目标高度变化比飞行测量高度小得多,为简化问题,记$ S=\dfrac{{P}_{t}{D}_{r}^{2}}{4\pi {R}^{4}{\alpha }^{2}}{\sigma }_{i} $,可认为S近似不变。为分析回波特性,将接收面分割为微元,每个微元近似看作小平面,可将回波看作光斑内所有N个微元的回波集合,即:
$$ f\left(t\right)=S\sum _{i=1}^{N}{\rho }_{i}\exp \left(-\frac{{|t-t_i|}^{2}}{2{s}_{i}^{2}}\right) $$ (4) 式中:si为组分波形标准差;ti为回波位置,与目标距离有关,即与$\dfrac{2 R}{c}$有关,c为激光传播速度。
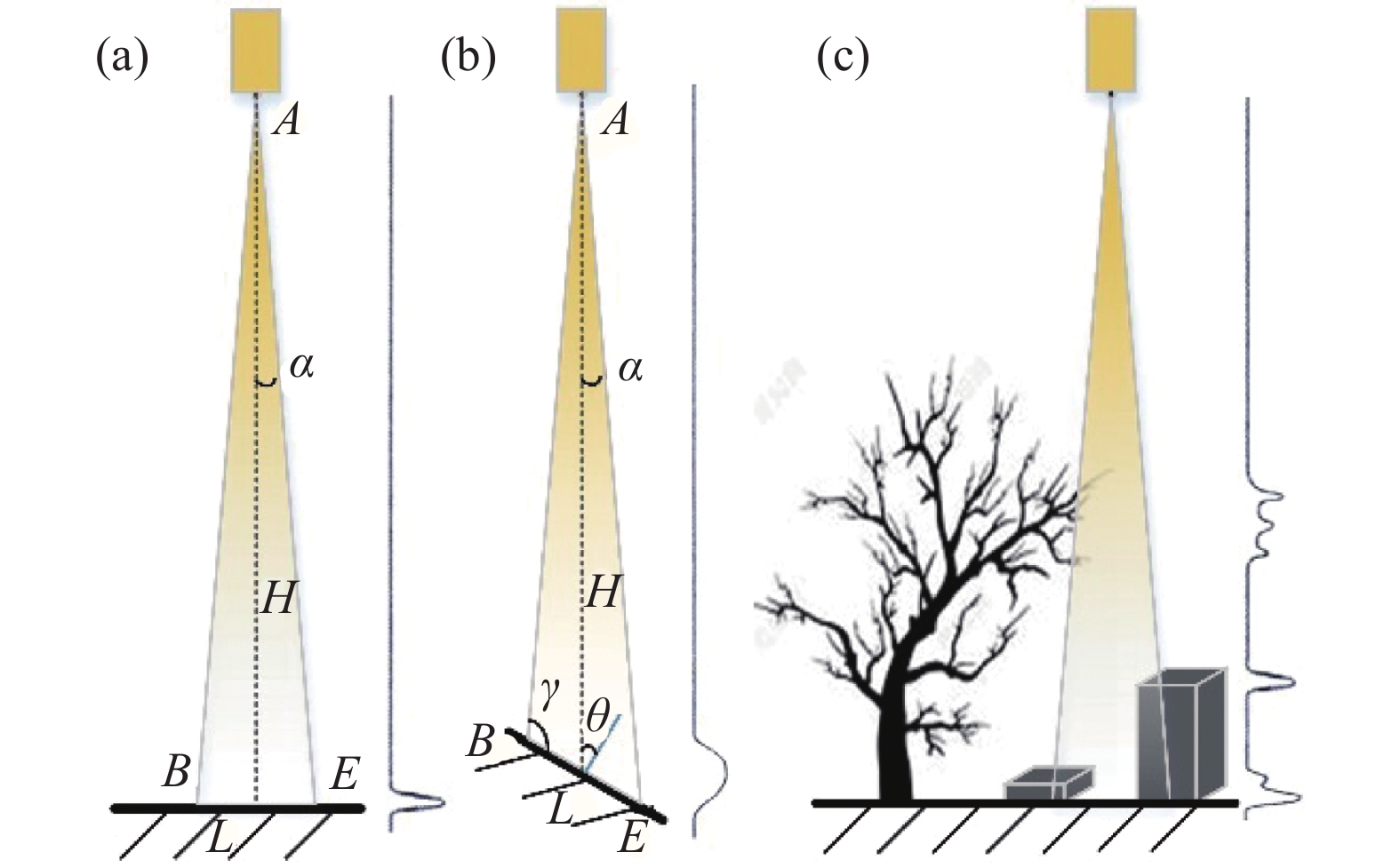
当激光垂直照在平面上,如图1(a)所示,α为激光发散角,H为激光发射点与地面垂直距离,B、E为光斑边缘点,L为光斑中心点。从图中可以看出,AL段光路最短,AB和AE段光路最长,因此可计算出回波间延时Δt1:

图 1 不同的激光照射情况。 (a) 垂直于激光束的平面;(b) 倾斜平面;(c) 多目标
Figure 1. Different LiDAR irradiation situations. (a) Plane perpendicular to LiDAR beam; (b) Inclined plane; (c) Multiple targets
$$ {\Delta t}_{1}=\frac{2(AB-H)}{c}=\frac{2 \left({H}/{\cos\alpha }-H\right)}{c} $$ (5) 当激光照在倾斜表面时,如图1(b)所示,θ为斜面法向量与竖直方向夹角。从图中明显可以看出,AE段长度大于H且大于图1(a)中的AE段,光路最长,假设AB~AL间最短光路为H ′,则可得到回波间延时Δt2:
$$ {\Delta t}_{2}=\frac{2(AE-{H}{{{'}}})}{c} $$ (6) $$ AE=H(1+\tan\alpha \tan\theta ) $$ (7) 由此可以看出,当H相同时,倾斜平面上最长光路AE大于水平平面最长光路,最短光路H ′小于等于水平平面最短光路H。因此在倾斜平面上回波间的延时更大,进而造成整体回波脉宽展宽,见图1(b)。
当光斑内存在多个目标时,从图1(c)可以看出,激光照射在相距足够远的目标上,回波会呈现多个波峰,而照射在相距较近的目标上,反射的多个回波叠加会引起脉宽展宽。事实上,当激光照在多目标上,目标的反射率不同会造成回波振幅不同,同时根据公式(3)可知,回波能量与目标距离的四次方成反比,当目标相距较远时,回波的振幅也不同,下文对实验数据集中地面和建筑类别全波形的分析也印证了这点。
相较于全波形,点云更直观地描述了目标几何形状,根据点云邻域可以提取丰富的几何特征,包括高程均值、方差、点云密度、法向量、曲率、线指数、面指数、球指数等。点云几何特征与全波形形状有着密切的相关性。当激光照在斜面上,根据斜面倾角,由公式(6)~(7)可推出光斑内回波延时,进而推测回波展宽情况,而根据点云邻域的最小二乘平面拟合又可估算该点的法向量,根据法向量坐标可计算得到该点所在面元的倾斜度,该倾斜度与全波形的展宽情况密切相关。激光照射在无法穿透的地面、建筑上形成单波峰回波,而该类点云的邻域高程方差较小,且没有复杂的垂直结构,曲率和球指数较小。由于植被具有缝隙,激光照射在植被上通常产生多回波,而植被点云的分布更复杂,曲率和球指数更大。考虑到点云和全波形所描述目标特性的相关性,通过深度学习进行高维特征的融合,有助于挖掘高维的目标特征,提升分类效果。
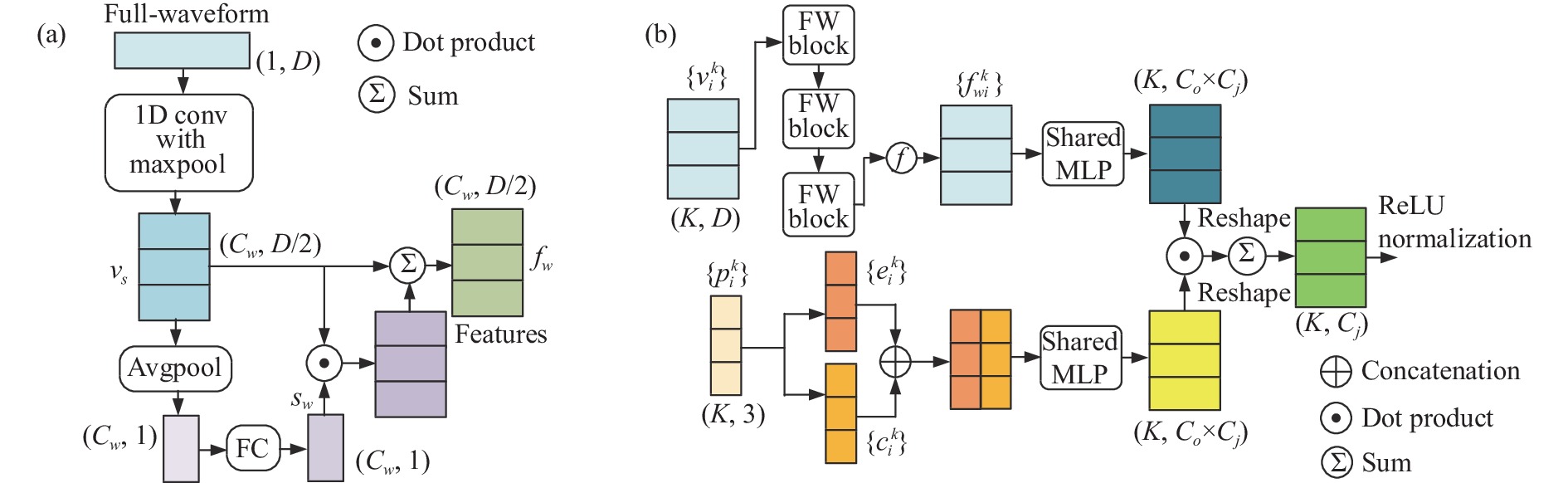
现有的结合全波形与三维点云的方法主要存在两方面问题:1)现有方法大多不具备单独的全波形特征提取模块,而是将全波形看作点云的附加特征,由于点云坐标不具备时序性,采用多层感知机将所有特征维度无序相加,这种方法忽略了全波形的时序性,因此无法充分提取目标物理特性;2)现有的特征融合方法通常为相加或串联拼接,这两种融合方法无法提取特征间复杂的线性交互关系,从而降低了特征提取效果,并且相加的方法还限制了融合的两组特征的维度。针对上述问题,文中构建了高维特征融合FF模块,如图2所示。首先,构建了全波形长短距特征提取FW模块来提取全波形时序性特征,其次,采用邻域相对位置编码和柱坐标编码,提取点云几何特征,最后,利用双低秩矩阵自适应地学习全波形与点云在高维特征间的相关性,从而提取出更深层的目标物理特性。下文将对模块各部分进行详细说明。
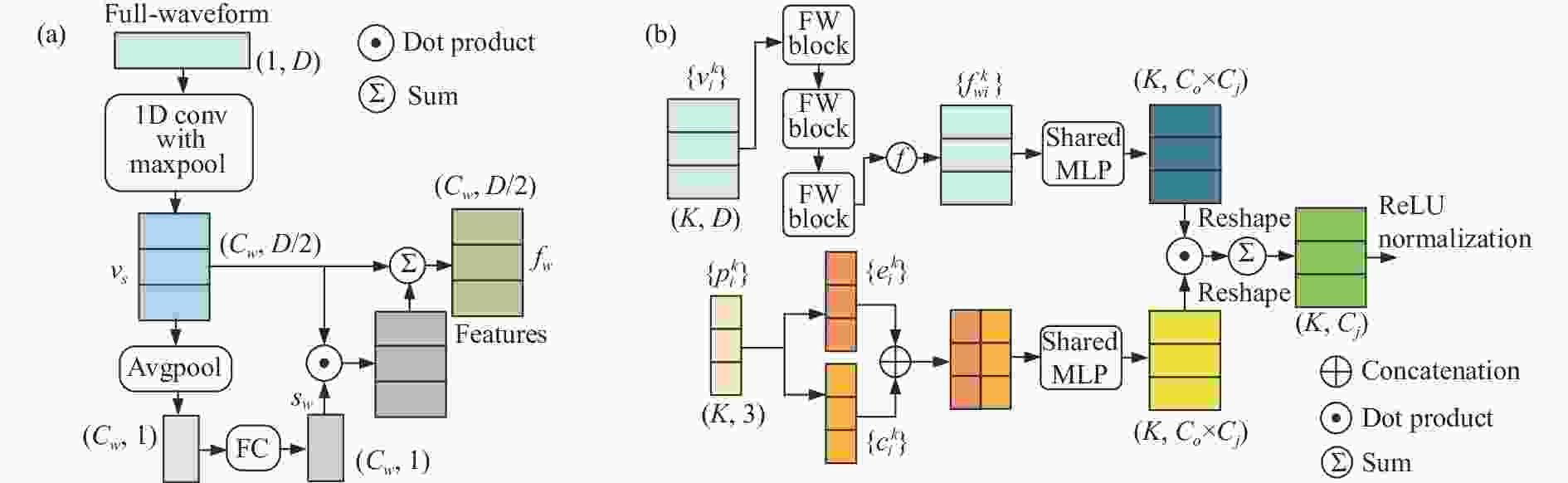
图 2 FW与FF模块结构图。 (a) FW模块结构;(b) FF模块结构
Figure 2. Structure of FW and FF block. (a) Structure of FW block; (b) Structure of FF block
-
全波形作为时间序列,直接在全波形时间维度上进行1D卷积可以提取相邻时间步的时序信息,却无法提取长距时间步的长期依赖关系。文中充分考虑了时间位置差异,先后对相邻的短距时序特征和全局的长距时序特征进行提取,构建了全波形特征提取FW模块。如图2(a)所示,其中D是组成全波形的元素数量,Cw是卷积特征维数。首先,采用卷积核尺寸为3的1D卷积,提取相邻时间位置的短距特征vs,采用归一化和ReLU函数进行非线性处理。进一步地,通过过滤器数量为2的最大池化层,实现对输入微小扰动的近似不变,同时减少参数。接着,为提取长距的全局特征的影响,在时间维度上进行全局平均池化来提取全局特征,采用全连接层自动学习权重sw∈R1×Cw,动态调整短距特征vs,从而得到长距特征。为防止随层数堆叠导致拟合效果变差,将得到的长距特征作为残差与短距特征vs相加。最终输出包含目标物理特性的全波形时序特征fw如下:
$$ {v}_{s}=MaxPool\left({g}_{c}\right(V\left)\right) $$ (8) $$ {s}_{w}={g}_{f}\left(AvgPool\left({v}_{s}\right)\right) $$ (9) $$ {f}_{w}={s}_{w}\odot {v}_{s}+{v}_{s} $$ (10) 式中:V表示一个由D个元素组成的全波形向量;$ {g}_{c} $为卷积核大小为3的1D卷积;$ {g}_{f} $为全连接层;$ \odot $代表元素级乘法。最后,为了获取不同时间感受野的波形特征,将FW模块进行堆叠使用,如图2(b)左上部分所示,最终得到每个点的全波形特征。
-
首先编码点云邻域的几何特征。通过k近邻算法得到每个采样点pi的k邻域点Nk(pi),计算邻域点pik~pi的相对位置和距离。由于邻域对中心点的影响与距离呈负相关,因此用相对距离的负指数来编码,得到邻域相对位置特征:
$$ {e}_{i}^{k}={p}_{i}\oplus {p}_{i}^{k}\oplus \left({p}_{i}-{p}_{i}^{k}\right)\oplus \exp(-{dis}_{i}^{k}) $$ (11) $$ {dis}_{i}^{k}=\sqrt{{{x}_{i}^{k}}^{2}+{{y}_{i}^{k}}^{2}+{{z}_{i}^{k}}^{2}} $$ (12) 式中:$ \oplus $代表特征维度上的串联;(xik,yik,zik)为笛卡尔坐标系下的相对坐标。由于真实场景中同一类物体的方向可能不同,增加相对中心点z轴旋转不变的柱坐标编码$c_i^k $,可表示为:
$$ {c}_{i}^{k}={\phi }_{i}^{k}\oplus {disxy}_{i}^{k} $$ (13) $$ {\phi }_{i}^{k}=\arctan\left(\frac{{y}_{i}^{k}}{{x}_{i}^{k}}\right) $$ (14) $$ {disxy}_{i}^{k}=\sqrt{{{x}_{i}^{k}}^{2}+{{y}_{i}^{k}}^{2}} $$ (15) 将柱坐标编码与笛卡尔坐标编码串联,通过多层感知机进行特征映射,最终得到邻域点pik的几何特征。
其次,对邻域点的全波形vik,采用1.1.1节所述方法得到全波形特征fik。之后提取全波形与点云几何特征在高维特征上的关联。由前面的分析可知,全波形包含了丰富的目标物理特性,其形状与点云几何特征密切相关,而传统相加的融合方法限制了融合的两组特征的维度,串联的融合方法无法提取特征间复杂的线性交互关系。针对该问题,文中采用映射矩阵G∈Rm×n(其中n、m为两特征的维度)概括全波形和点云几何特征在每个特征维度上的相互映射,学习特征间的线性关系。对于任一点p,其几何特征$ g $∈Rm,全波形特征fw∈Rn,构建映射矩阵G,将线性融合特征f∈Rj可表示为:
$$ {f}_{j}=g\times \boldsymbol{G}\times {f}_{w} $$ (16) 式中:$ \times $为矩阵乘法;fj为f的第j维特征。图3说明了映射矩阵G学习两特征间的线性关系的原理。根据矩阵乘法原理,映射矩阵G的每一列都与特征向量$ g $的所有维度一一对应,如图3中红色框所示,每列与特征$ g $对应相乘并相加得到该列的结果,映射矩阵G的所有列都会得到一个单独的计算结果,因此每列的参数可看作是向量$ g $不同维度上的相关性;同理,每一行与特征向量fw的所有维度一一对应,如图3中的蓝色框所示,每行可看作是向量fw不同维度上的相关性,因此映射矩阵可以有效地学习不同特征维度间的两两交互关系,通过与映射矩阵相乘,可得到一个点云与全波形的线性融合特征fj。

图 3 映射矩阵作用原理
Figure 3. Principle of mapping matrix
为丰富特征表达,通常会求得多个维度的融合特征,因此需要多个不同的映射矩阵,但这会引入大量的参数,增大计算开销,甚至造成过拟合。为减少参数,将矩阵G拆分为两个相乘的低秩矩阵W∈Rm×o和U∈Rn×o(其中o$\ll $n、m),则fj可表示为:
$$ {f}_{j}=\sum (g\times {\boldsymbol{W}}_{\boldsymbol{j}})\odot ({f}_{w}\times {\boldsymbol{U}}_{\boldsymbol{j}}) $$ (17) 式中:Wj∈Rm×o;Uj∈Rn×o(其中o$\ll $n、m);$ \sum $代表对结果的所有元素求和。Wj和Uj学习两个特征在每个维度上的相互映射,可用多层感知机学习参数,将其分别与特征$ g $和fw相乘,得到S∈R1×o,T∈R1×o,则S与T各自融合了两特征的所有维度。为实现两特征间的交互,将S与T进行元素级乘法并融合所有维度,得到第j维的融合特征fj。为快速计算f的所有维度,同时计算f的j维特征的全部映射,得到矩阵S∈R1×(j×o)和T∈R1×(j×o),先将矩阵恢复到三维,之后再对矩阵进行元素级乘法,得到融合特征f∈Rj,如图2(b)所示,图中 Cj表示特征维度,Co表示映射矩阵维度。由于过程中引入了元素乘法,输出神经元大小可能变化很大,为防止陷入局部最小,最后对融合后的特征进行归一化处理。
-
由于机载激光雷达飞行高度较高,采样点更稀疏,因此加强对邻域内上下文信息的挖掘有助于提升分类精度。以往的研究大多专注于邻域与中心点的相对位置,忽略了对其他点间相关性的挖掘。针对这一问题,文中构建了邻域特征增强LE模块。首先,搭建了邻域相关性挖掘LI模块,通过邻域全连接结构,提取点对间几何和语义相关性。之后根据每个点的特征,采用注意力池化有针对性地聚合邻域。

图 4 局部邻域特征增强。 (a) 局部邻域全连接结构;(b) LE模块结构
Figure 4. Local neighborhood feature enhancement. (a) Local neighborhood fully connected structure; (b) Structure of LE block
-
为提取邻域中每个点对其他点的影响,将邻域点两两相连,构成如图4(a)所示的全连接结构,其中每个点对$ ({p}_{i}^{j},{p}_{i}^{k}) $,对应特征$ ({f}_{i}^{j},{f}_{i}^{k}) $,代表第i点的第j个邻域点和第k个邻域点形成的点对结构。LI模块结构如图4(b)左上部分所示,图中C代表特征维度。邻域点往往是由同一目标或相近目标扫描得到的,因此在几何形状上和语义特征上相关。为提取点对的几何形状相关性,用相对距离的负指数与点对坐标串联,来表征点对间的相互影响。为提取语义相关性,计算点对语义特征差异$ \Delta{f}_{jk} $及特征乘积,则点对间的相互关系可表示为:
$$ \Delta{g}_{jk}={p}_{i}^{j}\oplus{p}_{i}^{k}\oplus\mathrm{e}\mathrm{x}\mathrm{p}(-{dis}_{jk}) $$ (18) $$ {dis}_{jk}=\sqrt{{({x}_{i}^{j}-{x}_{i}^{k})}^{2}+{({y}_{i}^{j}-{y}_{i}^{k})}^{2}+{({z}_{i}^{j}-{z}_{i}^{k})}^{2}} $$ (19) $$ \Delta{f}_{jk}=\mathrm{e}\mathrm{x}\mathrm{p}(-{\rm{mean}}(abs({f}_{i}^{j}-{f}_{i}^{k})\left)\right) $$ (20) $$ \Delta{F}_{jk}={\rm{MLP}}\left(\Delta{g}_{jk}\oplus \Delta{f}_{jk}\oplus \left({f}_{i}^{j}\times {f}_{i}^{k}\right)\right) $$ (21) 进一步地,计算邻域点对相关性分数,与对应点特征相乘并聚合,则邻域中的每个点都根据点对差异动态更新了对该点的影响,融合了与其他所有点间的相互关系,从而得到增强的局部上下文特征如下:
$$ {F}_{i}^{k}={f}_{i}^{k}+\sum _{j=0}^{j=K}{\rm{Softmax}}\left(\Delta{F}_{jk}\right){f}_{jk} $$ (22) -
为有效聚合邻域,文中根据邻域几何和语义特征进行注意力池化,采用下文所述方式提取邻域几何特征,并实现对z轴的旋转不变。对采样中心及邻域点语义特征$ {F}_{i} $和$ {F}_{i}^{k} $,用负指数表征语义特征差异:
$$ \Delta {F}_{i}^{k}=\exp(-{\rm{mean}}(abs({F}_{i}-{F}_{i}^{k})\left)\right) $$ (23) 同时计算邻域质心$ {p}_{i}^{m} $,以从$ {p}_{i} $~$ {p}_{i}^{m} $的方向值表征邻域分布情况,通过使用平均值降低下采样来引入随机性。对拼接的特征计算注意力得分并聚合,得到体现邻域几何结构和语义关系的中心注意力特征:
$$ {s}_{i}^{k}={\rm{Softmax}}\left({\rm{MLP}}\left({\rm{MLP}}\left({g}_{i}^{k}\oplus{p}_{i}^{m}\oplus{\Delta F}_{i}^{k}\right)\oplus{F}_{i}^{k}\right)\right) $$ (24) $$ {F}_{i}^{{{'}}}=\sum _{j=0}^{j=K}{s}_{i}^{j}\times {F}_{i}^{j} $$ (25) 式中:sik表示邻域点$ {p}_{i}^{k} $对采样中心点$ {p}_{i} $的注意权重。
-
为了补充全局上下文,提升分类准确性,文中构建全局特征增强GE模块。对于解码器输出特征F∈RN×C,其中N是场景中采样点数,C是特征通道数,首先通过平均池化层提取全局特征,其次用带有激活函数的全连接层进一步学习全局场景特征,将其作为全局特征权重$ {s}_{g} $,最后与解码器输出特征$ F $相乘,根据全局场景动态调整解码器输出特征。得到的全局增强特征可表示为:
$$ Z=F+{s}_{g}\odot F $$ (26) -
文中搭建了一种基于目标物理特性和几何特征的分类方法。该方法根据全波形与点云反映的目标物理特性,考虑到二者特征间的相关性,构建了高维特征融合FF模块,利用双低秩矩阵提取高维特征间相关性,进一步挖掘目标深层物理特性。同时还构建了邻域特征增强LE模块,构建了邻域全连接结构,充分挖掘邻域点对间几何和语义相关性,增强了局部结构信息。最后将模块嵌入层次化编码-解码器,构建了全波形机载激光雷达数据的端到端分类网络。图5显示了整体架构,网络将N×(3+D)的二维矩阵输入到编解码结构中,其中D是全波形维度,N为输入采样点数。在编码阶段采取最远点采样,以最大限度保留场景空间结构,每层通过LE模块编码,逐层学习空间上下文特征。需要注意的是,在第一层采用LE模块提取特征前先使用特征融合FF模块,融合全波形和点云几何特征,如图5中砖红色矩形所示,之后再对融合后的特征进行近一步提取。在解码阶段采用最近邻插值上采样,为合并低级别信息、增加不同尺度的感受野,将相同维度的下采样与上采样块的特征相连,利用卷积生成密集的特征预测。最后通过GE模块补充全局场景特征,将结果输入到全连接层,进行标签分类。

图 5 网络架构
Figure 5. Network architecture
-
文中使用Riegl LMS-Q780全波形ALS获得的数据集[14]进行训练和测试,Riegl LMS-Q780是一款多功能高空激光雷达传感器,它运行在离地面15500 ft (1 ft= 12 in),全视野可达60°,可用于大规模地形测绘。数据集由超过980万个采样点组成,分六类:地面、植被、建筑、电力线、传输塔和街道。每个点由164个数据组成,包含三部分:三维坐标、160个值的全波形和类标签。图6为全波形可视化,其中植被往往有多回波,波峰数量较多且不同点的波峰数量和分布位置不同,横坐标为相对时间,纵坐标为波形相对强度。电力线、传输塔也有多回波,但明显少于植被。地面、建筑和街道回波相似,多为单波峰,波峰位置相近且有拖尾。为近一步寻找三类波形差异,每类随机取1 000个回波,统计三类回波峰值及波峰位置分布的区间,对比发现三类回波峰值位置相近,峰值分布区间有交叉,区间上限相近,区间下限由高到低为建筑、地面和街道。由此可见,建筑、地面和街道在波形形状上大体相似但仍有微小差别,但与其他三类相比差异明显。

图 6 不同类别采样点的全波形。(a) 地面全波形;(b) 植被全波形;(c) 建筑全波形;(d) 电力线全波形;(e) 传输塔全波形;(f) 街道全波形
Figure 6. Full-waveform of sampling points of different categories. (a) Ground full-waveform; (b) Vegetation full-waveform; (c) Building full-waveform; (d) Power line full-waveform; (e) Transmission tower full-waveform; (f) Street path full-waveform
-
原始数据集是对场景的连贯扫描,包含数百万采样点,被划分存储到19个子集。每个子集包含数十万点,其中一个子集作测试集,仅在测试阶段使用,其余子集作训练集。由于GPU内存限制,无法对如此大规模的数据直接进行计算,因此将所有训练子集分割为长宽均为21.88 m的样本块,进一步地,减去中心坐标转换为局部坐标系,使样本更具一般性。测试时以相同尺寸分割测试集,便于数据批处理。由于扫描对象的形状和大小不同,数据集在不同类别上的分布不平衡,因此为降低对模型性能的影响,对分割的样本块进行筛选。从表1可知,地面和植被点数量明显更多,占测试集的89.8%,因此训练时对包含了全部较少四类的样本块全部选取,对其余样本块随机选取。实验中训练集共被分割为934个样本块,选取包含全部较少四类的共539个样本,其余样本随机选取,共选取了600个训练样本。针对较少四类样本间仍存在的类别不平衡问题,在计算损失函数时添加类别权重,公式如下:
表 1 数据集分布
Table 1. Dataset distribution
Label Class Train Test Number Number 1 Ground 1787352 20.4% 193070 18.1% 2 Vegetation 4719634 53.9% 765327 71.7% 3 Building 1514486 17.3% 49138 4.6% 4 Power line 71978 0.8% 8152 0.8% 5 Transmission tower 32008 0.4% 1829 0.2% 6 Street path 633606 7.2% 49580 4.6% $$ {\lambda }_{b}=\frac{1}{\ln \left(\beta +{{K}_{b}} \bigg/{{\displaystyle\sum }_{i=1}^{B}{K}_{i}}\right)} $$ (27) 式中:$ {\lambda }_{b} $为第b类的权重;Kb为第b类的点数;B为类别总数;β为类平衡系数,文中设置为1.1。
网络使用Pytorch框架实现,用Adam优化器在两块NVIDIA GeForce RTX 3090 GPU上进行200轮训练。设置初始学习率为0.001,每30个训练周期后减少10%。使用精度、召回率和F1分数评价分类效果。其中,精度是衡量过度检测的指标,召回率是衡量返回多少真正相关结果的指标,F1分数根据精度和召回率计算得到,在类别不平衡的情况下更适用。计算公式如下:
$$ precision=\frac{TP}{TP+FP} $$ (28) $$ recall=\frac{TP}{TP+FN} $$ (29) $$ F1\;score=\frac{precision\times recall}{precision+recall} $$ (30) 式中:TP、FP和FN分别表示真正例、假正例和假反例的数量。
-
为定量评价分类性能,对比现有的融合全波形和点云的深度学习方法,包括CNN[14]、FCN[14]和FWNet2[16],以及典型的基于点云的分类方法,包括PointNet[9]、PointNet ++[10]、RandLA-Net [11] 、GACNN[12]和GFSAE[13],分类结果见表2。需要注意的是,在对比方法中,CNN为仅采用全波形数据进行分类,为对比文中网络的效果,其余网络均同时使用了全波形与点云数据进行分类。其中FCN先通过1D卷积提取全波形特征,之后与z坐标结合投影到二维图像进行分类;而余下方法将全波形作为点云附加特征,与点云串联拼接。实验结果表明,文中的平均精度、召回率和F1分数分别达到0.96、0.90和0.92,6个类的F1分数均大于0.85,可以有效实现分类。相比于当前最优的FWNet2,该方法在平均精度和召回率上均提升0.01,平均F1分数也达到最优效果。同时文中方法在地面和街道类的精度、召回率和F1分数比FWNet2分别提高了0.03、0.01、0.03和0.01、0.04、0.03,植被和传输塔类也达到了最优效果。
表 2 不同方法之间的定量比较
Table 2. Quantitative comparison of different methods
Method Metric Ground Vegetation Building Power line Transmission
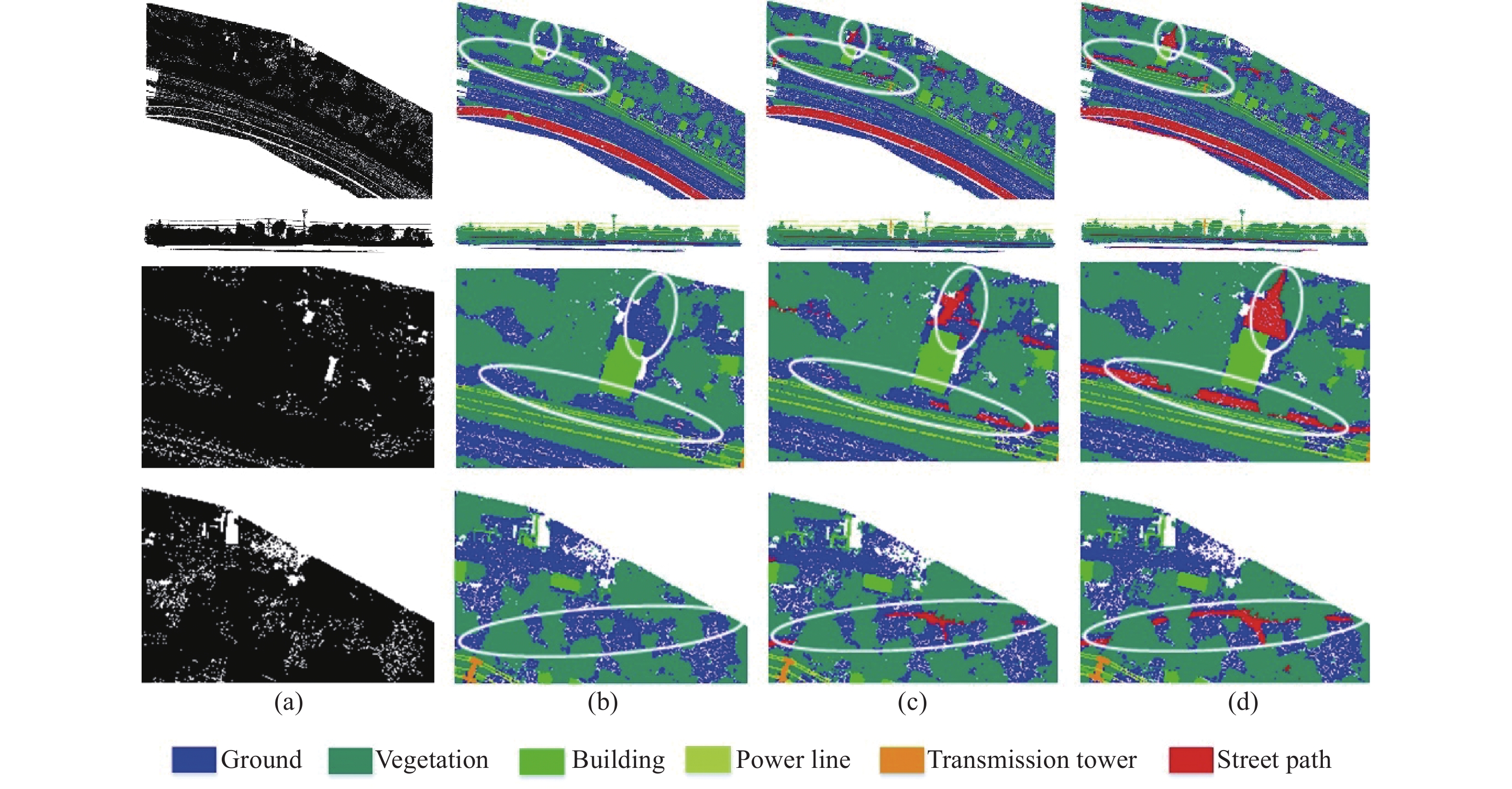
towerStreet path Mean CNN[14] Precision 0.60 0.96 0.07 0.10 0.01 0.18 0.32 Recall 0.18 0.78 0.11 0.88 0.44 0.60 0.50 F1 score 0.28 0.86 0.09 0.19 0.02 0.28 0.28 FCN[14] Precision 0.79 0.95 0.99 0.98 0.63 0.67 0.84 Recall 0.84 0.97 0.93 0.91 0.88 0.69 0.87 F1 score 0.81 0.96 0.96 0.94 0.73 0.68 0.85 PointNet[9] Precision 0.56 0.97 0.95 0.92 0.61 0.94 0.83 Recall 0.91 0.85 0.83 0.84 0.48 0.62 0.76 F1 score 0.69 0.91 0.88 0.88 0.53 0.75 0.77 PointNet++[10] Precision 0.56 0.98 0.99 0.97 0.52 0.96 0.83 Recall 0.93 0.85 0.85 0.85 0.66 0.60 0.83 F1 score 0.70 0.91 0.91 0.91 0.58 0.74 0.80 GFSAE[13] Precision 0.77 0.97 0.93 0.96 0.70 0.83 0.86 Recall 0.90 0.95 0.93 0.93 0.73 0.62 0.84 F1 score 0.83 0.96 0.93 0.94 0.71 0.71 0.85 RandLA-Net[11] Precision 0.74 0.98 0.83 0.93 0.81 0.99 0.88 Recall 0.95 0.93 0.95 0.97 0.67 0.60 0.85 F1 score 0.83 0.95 0.89 0.95 0.73 0.75 0.85 GACNN[12] Precision 0.76 0.98 0.87 0.95 0.74 0.94 0.87 Recall 0.95 0.94 0.95 0.98 0.79 0.63 0.87 F1 score 0.84 0.96 0.91 0.96 0.76 0.75 0.86 FWNet2[16] Precision 0.80 0.98 0.99 0.99 0.99 0.97 0.95 Recall 0.94 0.96 0.95 0.99 0.79 0.71 0.89 F1 score 0.86 0.97 0.97 0.99 0.88 0.82 0.92 Proposed method Precision 0.83 0.98 0.98 0.99 0.97 0.98 0.96 Recall 0.95 0.96 0.95 0.99 0.82 0.75 0.90 F1 score 0.89 0.97 0.96 0.99 0.89 0.85 0.92 为定性观察分类效果,将结果可视化如图7所示,可以看出模型成功为大部分点生成了正确的标签,并提升了准确度,如图中白色圈中所示。观察可见,大部分街道周围分布着地面和植被。其中地面与街道点云形状相似,其全波形多为单波峰,峰值相近但仍有区别。植被全波形大多为多回波,通常最后一个波峰即为地物回波,因此植被全波形包含了该点的垂直空间结构。文中的特征融合模块提取了植被、地面、街道全波形中蕴含的丰富物理特性,自适应地学习其与点云几何特征的相关性,从而挖掘深层的物理特性关联,同时邻域特征增强模块学习了植被融合特征中包含的丰富垂直结构,提升了对街道的识别效果。

图 7 分类结果可视化。 (a) 输入数据;(b) FWNet2的分类结果;(c) 文中方法的分类结果;(b) 真实类别标签
Figure 7. Visualization of classification results. (a) Input data; (b) Classification results of FWNet2; (c) Classification results of proposed method; (d) Real category label
-
为验证网络各模块的效果,本节在文献[14]的数据集上进行了消融实验研究。
-
文中的特征融合模块由两部分组成:全波形特征提取、点云几何特征提取及特征融合。为验证各部分的效果,本节设计并进行了消融实验,如表3所示。设计了模型A作为对照,该模型采用1D卷积提取全波形特征,并以串联方式结合特征。模型B在此基础上采用FW模块提取全波形时序性特征,平均精度、召回率和F1分数提高了0.02、0.02和0.01,说明FW模块通过提取长短距时序信息,得到更丰富的全波形特征,有效地提升了分类性能。模型C在模型A的基础上以双低秩矩阵的融合方式替代串联融合,提取高维特征间的相关性,平均精度、召回率和F1分数提高了0.04、0.03和0.02,表明通过双低秩映射矩阵学习两特征间的关联可提升分类性能。同时,文中方法在模型B基础上以双低秩矩阵融合方式代替串联,在模型C基础上以堆叠的FW模块提取全波形时序特征,分类效果均提高,近一步验证了特征融合模块对分类性能的提升。
表 3 对特征融合模块的消融实验
Table 3. Ablation experiment on FF block
Model FW block Fusion Mean precision Mean recall Mean F1 score A × $\oplus $ 0.90 0.86 0.88 B √ $\oplus $ 0.92 0.88 0.89 C × √ 0.94 0.89 0.90 Proposed method √ √ 0.96 0.90 0.92 本节还对FW模块的堆叠层数进行了消融实验,以确定最优层数,实验结果如表4所示。可以看出,最初随着模块堆叠层数的增加,网络分类能力逐渐增强,然而当堆叠层数达到四层时,网络分类性能下降,因此文中网络选择堆叠三层FW模块,以达到最优的分类效果。
表 4 对FW模块堆叠层数的消融实验
Table 4. Ablation experiment on stacking layers of FW block
Model Number of layers Mean precision Mean recall Mean F1 score D 1 0.94 0.89 0.91 E 2 0.95 0.90 0.91 F 3 0.96 0.90 0.92 G 4 0.95 0.89 0.91 -
文中的邻域特征增强LE模块由两部分构成:邻域相关性挖掘LI模块、注意力池化。为验证LE模块各部分以及全局特征增强GE模块的效果,本节进行了消融实验,如表5所示。设计了模型H作为对照,该模型采用多层感知机提取单点特征,以最大池化聚合邻域。模型I在此基础上采用文中的LI模块提取邻域点对间的几何和语义相关性,增强邻域特征,分类平均精度、召回率和F1分数分别提高了0.03、0.02和0.01。模型J在模型H的基础上,采用注意力池化替代最大池化,从而根据邻域几何和语义特征,有针对性地聚合,三个指标分别提高了0.01、0.02和0.01,验证了邻域特征增强模块对分类性能的提升。模型K在文中网络的基础上,去掉GE模块,直接对解码器输出的特征进行分类。文中网络加入GE模块后,三个指标提高了0.02、0.02和0.02,验证了GE模块对分类性能的提升。
表 5 对邻域与全局特征增强模块的消融实验
Table 5. Ablation experiments on LE and GE block
Model LE GE Mean precision Mean recall Mean F1 score LI block Attention Pooling H MLP Max pooling √ 0.91 0.86 0.88 I √ Max pooling √ 0.94 0.88 0.89 J MLP √ √ 0.92 0.88 0.89 K √ √ × 0.94 0.88 0.90 Proposed method √ √ √ 0.96 0.90 0.92 -
文中搭建了一种结合目标物理特性和几何特征深度学习算法,实现了机载LiDAR数据的端到端分类。针对全波形与点云在目标物理特性上的相关性,构建了特征融合FF模块,提取了全波形时序特征,通过双低秩矩阵学习全波形与点云几何特征间的相关性,实现了对高维物理特性的挖掘。通过构建邻域特征增强LE模块,挖掘了邻域点间几何和语义特征的相关性,加强了对局部结构信息的提取,并根据邻域特征有针对性地聚合。最后将模块嵌入层次化的编解码结构中,形成了基于特征级融合的端到端分类网络。在公开数据集上的分类实验表明,六个类的F1分数均大于0.85,平均精度、平均召回率和平均F1得分分别达到0.96、0.90和0.92,与已有的分类算法相比,文中方法有效提升了分类精度。
Airborne LiDAR data classification method combining physical and geometric characteristics
-
摘要: 机载LiDAR数据分类是根据数据特征为每个点指定类别标签。针对现有方法忽略全波形与点云在物理特性上的关联、缺乏对邻域几何和语义相关性的深入挖掘,从而导致捕获局部结构能力不足的问题,搭建了结合目标物理与几何特性的分类方法,实现了由全波形和点云组成的机载LiDAR数据端到端分类。首先,构建了特征融合模块,提取了全波形时序特征和点云几何特征,依据两种数据物理意义上的关联,通过双低秩矩阵实现了全波形与点云特征级融合。其次,构建了邻域特征增强模块,挖掘点对相关性,增强对局部几何结构的学习。最后基于层次化编解码结构搭建了分类网络。该网络在机载LiDAR数据集上测试,达到平均精度0.96、平均召回率0.90、平均F1分数0.92,证明了网络的有效性。Abstract:
Objective Full-waveform airborne LiDAR can not only obtain 3D point clouds, but also obtain full-waveform of the target. The classification of full-waveform LiDAR data is to assign a category label to each point based on data characteristics. It is an important part of data post-processing and has significant application value in the fields such as remote sensing and topographic mapping. However, existing methods overlook the correlation between full-waveform and point clouds geometry in terms of physical characteristics, and lack in-depth exploration of the correlation in neighborhood geometry and semantic features between point pairs. Therefore, the existing methods lack the ability to capture local structural information, which affects the classification effect. To address the above issues, a classification method based on the physical and geometric characteristics of the target is proposed. This method mines the high-dimensional feature association between 3D point clouds and full-waveforms on the high-dimensional physical characteristics of the target, and enhances the learning of local geometric structural information, thereby improving the classification ability of the model. Methods A classification method based on target physical and geometric features is proposed. Firstly, a high-dimensional feature fusion module is proposed, which extracted the rich physical characteristics from the full-waveform, and extracted the geometric features of the point clouds. Based on the correlation between full-waveforms and point clouds on the physical characteristics of the target, the complex relationship between the two is learned through a dual low-rank matrix, and deeper physical features are excavated (Fig.2). Secondly, a local neighborhood feature enhancement module is designed to enhance the learning of local geometric structures by constructing a fully-connected neighborhood structure, mining the geometric and semantic correlations between neighboring point pairs (Fig.3). Finally, by using the hierarchical encoder-decoder structure, the characteristics of multiple receptive field can be conbined. A classification method based on the physical characteristics and geometric characteristics can be constructed to improve the classification ability of the model (Fig.4). Results and Discussions The proposed method is based on the correlation between point clouds and full-waveforms on the physical characteristics of the target. By fusing the two, the physical meaning of the features is enriched and the learning of local geometric structures is enhanced. From Tab.2, it can be seen that the proposed method successfully generated correct labels for most points, achieving an average accuracy of 0.96, a recall of 0.90, and an F1 score of 0.92. Multiple methods such as FCN, GACNN, and FWNet2 are used for testing on the same dataset. Compared with FWNet2, which has the best performance among existing methods, our method has effective improvements in average accuracy, average recall, and average F1 score. Among them, compared with FWNet2, the accuracy, recall, and F1 score of our method have been improved by 0.02, 0.01, and 0.02 respectively in the ground category, and by 0.02, 0.04, and 0.03 respectively in the street category. The test results are shown (Fig.6). Conclusions This article proposes a classification algorithm based on the physical and geometric characteristics of the target. This method focuses on the rich physical characteristics and vertical structural information of the target contained in the full-waveform, as well as the correlation between full-waveforms and geometric features of point clouds. The fusion of the two features is achieved using a dual low-rank matrix; And based on the local neighborhood fully-connected structure, the learning of local structural information are strengthened, thus constructing an end-to-end full-waveform airborne LiDAR data classification network. Multiple experiments show that the average accuracy and recall of our classification method are as high as 0.96 and 0.90, respectively, indicating the effectiveness of this method. At the same time, it provides some possibilities for exploration in-depth feature extraction and fusion, based on the correlation in target physical characteristics between full-waveforms and point clouds. -
Key words:
- airborne LiDAR /
- data classification /
- feature fusion /
- full-waveform /
- 3D point clouds /
- physical characteristics
-
图 1 不同的激光照射情况。 (a) 垂直于激光束的平面;(b) 倾斜平面;(c) 多目标
Figure 1. Different LiDAR irradiation situations. (a) Plane perpendicular to LiDAR beam; (b) Inclined plane; (c) Multiple targets
图 2 FW与FF模块结构图。 (a) FW模块结构;(b) FF模块结构
Figure 2. Structure of FW and FF block. (a) Structure of FW block; (b) Structure of FF block
图 4 局部邻域特征增强。 (a) 局部邻域全连接结构;(b) LE模块结构
Figure 4. Local neighborhood feature enhancement. (a) Local neighborhood fully connected structure; (b) Structure of LE block
图 6 不同类别采样点的全波形。(a) 地面全波形;(b) 植被全波形;(c) 建筑全波形;(d) 电力线全波形;(e) 传输塔全波形;(f) 街道全波形
Figure 6. Full-waveform of sampling points of different categories. (a) Ground full-waveform; (b) Vegetation full-waveform; (c) Building full-waveform; (d) Power line full-waveform; (e) Transmission tower full-waveform; (f) Street path full-waveform
图 7 分类结果可视化。 (a) 输入数据;(b) FWNet2的分类结果;(c) 文中方法的分类结果;(b) 真实类别标签
Figure 7. Visualization of classification results. (a) Input data; (b) Classification results of FWNet2; (c) Classification results of proposed method; (d) Real category label
表 1 数据集分布
Table 1. Dataset distribution
Label Class Train Test Number Number 1 Ground 1787352 20.4% 193070 18.1% 2 Vegetation 4719634 53.9% 765327 71.7% 3 Building 1514486 17.3% 49138 4.6% 4 Power line 71978 0.8% 8152 0.8% 5 Transmission tower 32008 0.4% 1829 0.2% 6 Street path 633606 7.2% 49580 4.6%  下载: 导出CSV
下载: 导出CSV
表 2 不同方法之间的定量比较
Table 2. Quantitative comparison of different methods
Method Metric Ground Vegetation Building Power line Transmission
towerStreet path Mean CNN[14] Precision 0.60 0.96 0.07 0.10 0.01 0.18 0.32 Recall 0.18 0.78 0.11 0.88 0.44 0.60 0.50 F1 score 0.28 0.86 0.09 0.19 0.02 0.28 0.28 FCN[14] Precision 0.79 0.95 0.99 0.98 0.63 0.67 0.84 Recall 0.84 0.97 0.93 0.91 0.88 0.69 0.87 F1 score 0.81 0.96 0.96 0.94 0.73 0.68 0.85 PointNet[9] Precision 0.56 0.97 0.95 0.92 0.61 0.94 0.83 Recall 0.91 0.85 0.83 0.84 0.48 0.62 0.76 F1 score 0.69 0.91 0.88 0.88 0.53 0.75 0.77 PointNet++[10] Precision 0.56 0.98 0.99 0.97 0.52 0.96 0.83 Recall 0.93 0.85 0.85 0.85 0.66 0.60 0.83 F1 score 0.70 0.91 0.91 0.91 0.58 0.74 0.80 GFSAE[13] Precision 0.77 0.97 0.93 0.96 0.70 0.83 0.86 Recall 0.90 0.95 0.93 0.93 0.73 0.62 0.84 F1 score 0.83 0.96 0.93 0.94 0.71 0.71 0.85 RandLA-Net[11] Precision 0.74 0.98 0.83 0.93 0.81 0.99 0.88 Recall 0.95 0.93 0.95 0.97 0.67 0.60 0.85 F1 score 0.83 0.95 0.89 0.95 0.73 0.75 0.85 GACNN[12] Precision 0.76 0.98 0.87 0.95 0.74 0.94 0.87 Recall 0.95 0.94 0.95 0.98 0.79 0.63 0.87 F1 score 0.84 0.96 0.91 0.96 0.76 0.75 0.86 FWNet2[16] Precision 0.80 0.98 0.99 0.99 0.99 0.97 0.95 Recall 0.94 0.96 0.95 0.99 0.79 0.71 0.89 F1 score 0.86 0.97 0.97 0.99 0.88 0.82 0.92 Proposed method Precision 0.83 0.98 0.98 0.99 0.97 0.98 0.96 Recall 0.95 0.96 0.95 0.99 0.82 0.75 0.90 F1 score 0.89 0.97 0.96 0.99 0.89 0.85 0.92
下载: 导出CSV
表 3 对特征融合模块的消融实验
Table 3. Ablation experiment on FF block
Model FW block Fusion Mean precision Mean recall Mean F1 score A × $\oplus $ 0.90 0.86 0.88 B √ $\oplus $ 0.92 0.88 0.89 C × √ 0.94 0.89 0.90 Proposed method √ √ 0.96 0.90 0.92
下载: 导出CSV
表 4 对FW模块堆叠层数的消融实验
Table 4. Ablation experiment on stacking layers of FW block
Model Number of layers Mean precision Mean recall Mean F1 score D 1 0.94 0.89 0.91 E 2 0.95 0.90 0.91 F 3 0.96 0.90 0.92 G 4 0.95 0.89 0.91
下载: 导出CSV
表 5 对邻域与全局特征增强模块的消融实验
Table 5. Ablation experiments on LE and GE block
Model LE GE Mean precision Mean recall Mean F1 score LI block Attention Pooling H MLP Max pooling √ 0.91 0.86 0.88 I √ Max pooling √ 0.94 0.88 0.89 J MLP √ √ 0.92 0.88 0.89 K √ √ × 0.94 0.88 0.90 Proposed method √ √ √ 0.96 0.90 0.92
下载: 导出CSV
-
[1] Zhang K, Ye L J, Wen X, et al. A dual attention neural network for airborne LiDAR point cloud semantic segmentation [J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 1-17. [2] Li Pengcheng, Xu Qing, Xing Shuai, et al. Full-waveform LiDAR data decomposition method based on global convergent LM [J]. Infrared and Laser Engineering, 2015, 44(8): 2262-2267. (in Chinese) doi: 10.3969/j.issn.1007-2276.2015.08.005 [3] Nardinocchi C, Balsi M, Esposito S, et al. Fully automatic point cloud analysis for powerline corridor mapping [J]. IEEE Transactions on Geoscience and Remote Sensing, 2020, 58(12): 8637-8648. doi: 10.1109/TGRS.2020.2989470 [4] Li W, Luo Z, Xiao Z, et al. A GCN-based method for eextracting power lines and pylons from airborne LiDAR data [J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 1-14. [5] Hu Shanjiang, He Yan, Tao Bangyi, et al. Classification of sea and land waveforms based on deep learning for airborne laser bathymetry [J]. Infrared and Laser Engineering, 2019, 48(11): 1113004. (in Chinese) doi: DOI:10.3788/IRLA201948.1113004 [6] Liang G, Zhao X, Zhao J, et al. MVCNN: A deep learning-based ocean-land waveform classification network for single-wavelength LiDAR bathymetry [J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2023, 16: 656-674. doi: 10.1109/JSTARS.2022.3229062 [7] 沈俊, 尚建华, 贺岩. 全波形机载激光雷达数据处理技术的研究进展[J]. 激光技术, 2018, 42(03): 295-299. doi: 10.7510/jgjs.issn.1001-3806.2018.03.002 Shen Jun, Shang Jianhua, He Yan. Research process of data processing technology of full-waveform airborne laser radars [J]. Laser Technology, 2018, 42(3): 295-299. (in Chinese) doi: 10.7510/jgjs.issn.1001-3806.2018.03.002 [8] Zhu Shixian. Research on Critical Technology of Intensity Imaging of 905nm Pulsed Li DAR[D]. Tianjin: Tianjin University, 2018. Zhu Shixian. Research on critical technology of intensity imaging of 905 nm pulsed LiDAR[D]. Tianjin: Tianjin University, 2018. (in Chinese) [9] Charles R Q, Hao S, Mo K C, et al. Point-Net: deep learning on point sets for 3D classification and segmentation[C]//2017 IEEE Conference on Computer Vision and Pattern Recognition, 2017: 77-85. [10] Qi C R, Yi L, Su H, et al. Pointnet++: Deep hierarchical feature learning on point sets in a metric space[C]//Advances in Neural Information Processing Systems, 2017: 5099–5108. [11] Hu Q, Yang B, Xie L, et al. RandLA-Net: Efficient semantic segmentation of large-scale point clouds [C]//2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2020: 11105-11114. [12] Cong W, Xiang L, Yao X J, et al. Airborne LiDAR point cloud classification with global-local graph attention convolution neural network [J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2021, 173: 181-194. doi: 10.1016/j.isprsjprs.2021.01.007 [13] Chen Q, Zhang Z, Chen S, et al. A self-attention based global feature enhancing network for semantic segmentation of large-scale urban street-level point clouds [J]. International Journal of Applied Earth Observation and Geoinformation, 2022, 113: 102974. doi: 10.1016/j.jag.2022.102974 [14] Zoriz S, Maset E, Fusiello A, et al. Full-waveform airborne LiDAR data classification using convolutional neural networks [J]. IEEE Transactions on Geoscience and Remote Sensing, 2019, 57(10): 8255-8261. doi: 10.1109/TGRS.2019.2919472 [15] Shinohara T, Xiu H, Matsuoka M, et al. FWNet: Semantic segmentation for full-waveform LiDAR data using deep learning [J]. Sensors, 2020, 20(12): 3568. doi: 10.3390/s20123568 [16] Shinohara T, Xiu H, Matsuoka M, et al. Semantic segmentation for full-waveform LiDAR data using local and hierarchical global feature extraction[C]//Sigspatial'20: 28th International Conference on Advances in Geographic Information Systems, 2020: 640–650. [17] Wagner W, Ullrich A, Ducic V, et al. Gaussian decomposition and calibration of a novel small-footprint full-waveform digitizing airborne laser scanner [J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2006, 60(2): 100-112. doi: https://doi.org/10.1016/j.isprsjprs.2005.12.001Getrightsandcontent -

 点击查看大图
点击查看大图
计量
- 文章访问数: 142
- HTML全文浏览量: 32
- PDF下载量: 57
- 被引次数: 0

