



 下载:
下载:




-
当前,主流的点云数据通过三维激光雷达扫描获取。三维激光扫描技术以激光测距原理为基础,快捷、精确地获取测站与物体表面之间的距离[1]。针对三维激光雷达扫描获得的点云数据,人们研究了一系列数据处理方法[2–8]来帮助精细描绘目标细节,实现点云扩展、目标模型重建。当前对激光雷达点云数据处理主要分为两类:一类是在多边形网格的基础上进行插值增加采样点[9];另一类是以拟合点云模型表面的曲面为基础进行插值增加采样点[7]。
当前的点云增补方法,主要是通过不同数学方法对海量点云数据进行处理,忽视了对单个点云数据的处理,没有充分挖掘单个点云的信息。激光信号由于其波束窄、频率高、波长短,相干性高和脉宽小,最能携带目标调制精确信息。多/高光谱全波形激光雷达的出现,为多维信息点云生成提供了新的技术方案[4,8,10-12]。通过记录不同方向上、不同波长的激光回波完整波形数据。通过波形分解和重构的目标光谱反射率进行点云的扩展和分类。
但是当激光雷达,在对于有明显遮蔽关系的目标进行探测时(例如树冠与地表、树叶与树干、楼宇间遮挡、伪装遮蔽目标侦察等场景),若激光光斑处在目标边缘则会发生能量的分裂,一部分能量落在距离靠前的遮蔽物上,另一部分能量落在距离靠后的被遮蔽目标上,导致激光回波波形与发射波形相比变得更加复杂。
对于高光谱全波形激光雷达而言,准确获取目标反射光谱的前提是对复杂回波中不同目标贡献的波形分量进行准确区分。在对上述遮蔽情况下回波波形进行处理时会面临如下问题:一是距离信息获取的精确性受脉宽限制,由于激光雷达的距离分辨率与发射激光脉冲宽度成正比,当两目标距离很近时难以通过传统波形分解的处理方式进行距离信息精确获取;二是光谱信息获取的准确性受到光斑能量分裂的影响,由于遮挡体系之间目标属性(尺度、结构、间距、数量、姿态、倾角和光谱反射率)存在较大差异,导致不同波长回波波形发生不同程度的畸变,这被称为“Sub-footprint”效应[6,13-14],单纯由各通道强度信息组成的目标光谱与通常情况的测量结果有较大区别,影响目标相关光谱信息的获取和判别。
上述问题将直接影响在时间和光谱维度上目标信息的准确获取,进而影响了点云数据的扩展和分类标识效果。文中提出了一种新的高光谱回波波形分解方法,利用回波波形的种类判别和多通道间的波形分解优化来解决时间-光谱维度信息获取不准确的问题,进一步提出相应的点云扩展和标识方法。
-
在遥感探测过程中,由于目标的光谱反射率不同,超连续谱激光源能量分布也不均匀,回波信号在不同光谱通道之间通常会有明显的变化[3,5,12]。这对波形参数的提取,即目标的几何位置和光谱参数获取有很大影响,特别是对微弱信号或重叠信号。此外,各光谱通道的脉冲回波到达时间不是严格同步的,影响几何信息的精确检索[3,5]。因此,考虑到各光谱通道回波波形的空间相关性和形状特征,提出了一种高光谱全波形激光雷达回波波形数据处理方法,以获取先验知识为前提,进一步提升多目标波形分量的提取精度。该方法分为回波预处理,先验知识获取,多通道波形分解与优化三个步骤,如图1所示。
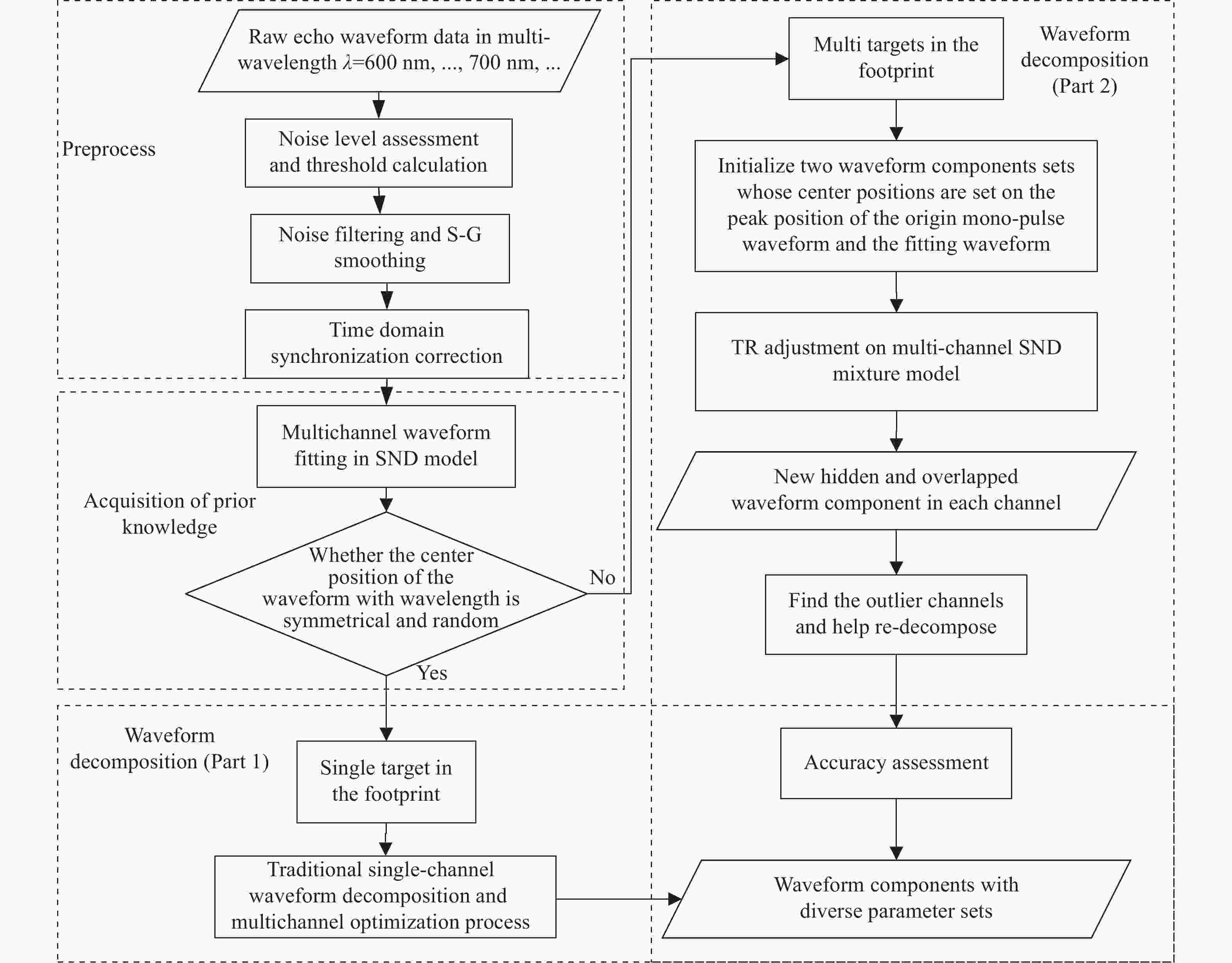
图 1 高光谱回波波形分解方法流程图
Figure 1. Flowchart of the proposed hyperspectral waveform decomposition method
-
回波预处理部分包括三部分的工作,分别是噪声的评估和阈值计算、滤波降噪和时域同步校正。噪声的评估和阈值计算用于后续波形分解时作为分解的停止线;滤波降噪是减少传输过程中的多种噪声对波形分量的影响;时域同步校正是因为多个通道的发射脉冲和回波的时间不同,需要进行校正以后在多通道中才存在可比较性。
噪声评估和阈值计算中,首先在原始回波数据中确定有效回波波形所处位置和范围,在有效波形范围外的数据中采用均值滤波的方式通过对数据点进行滑动窗平均计算来估计每个点周围的噪声级别,通过所有位置噪声级别的估计结果平均以确定该组数据噪声阈值。
在下一步的滤波降噪中,文中采用Savitzky-Golay滤波算法[15],通过拟合多项式函数来对原始数据进行平滑处理,从而消除噪声和抖动,保留数据信号的主要特征。为了确保保留尽可能详细的信号细节特征,文中选取窗口大小为9,多项式阶数为3。
为了保证各通道回波数据之间的时间匹配,在滤波处理后,采用多个通道的发射脉冲与回波数据进行时间校正,由于高光谱激光雷达系统(Hyperspectral LiDAR,HSL)各通道所记录的波形数据在时间上存在差异[3,5,16],为防止出现不同通道下同一目标对应的距离差距过大而造成错检,需要在时域上对所有通道的波形数据进行校正。在去除拟合程度低、记录误差大的通道的回波数据之后,以剩余所有通道发射脉冲中心时间的均值$ {\overline s_{trans}} $统一作为发射脉冲时间的起点,计算各个通道发射脉冲的中心时间$ {s}_{{\lambda }_{j},trans} $与$ {\overline{s}}_{trans} $的差值,将整个通道的距离按照差值平移到相应的位置。
$$ \Delta {t_{{\lambda _j}}} = {s_{{\lambda _j},trans}} - {\overline s_{trans}} $$ (1) 式中:$ \Delta {t}_{{\lambda }_{j}} $代表第$ j $个通道(对应波长$ \lambda $)的波形数据需要整体平移的时间;$ \Delta {t_{{\lambda _j}}} < 0 $表示发射脉冲中心时间在起点的左边,需要向右平移,$ \Delta {t}_{{\lambda }_{j}} > 0 $则反之需要向左平移。
-
先验知识的获取主要是对激光足印中包含的目标数量的分析。影响回波波形的因素有目标的个数、表面特性、光谱等多种因素。例如当两个光谱反射率不同且间距很近的目标时,由于两种目标在同一波长下反射率不同,因此不同波长下两目标回波叠加以后其中心位置将会发生变化,虽然回波看起来与单目标回波波形相似,但实际上是由于目标间距小于脉冲宽度所对应的距离分辨单元。
因此文中采用多光谱通道回波波形进行统计分析,利用偏正态函数首先将各个通道的回波波形进行拟合,对于包含多目标的回波,通过分析回波中心位置、脉宽和偏度等多种参数,从光谱维发现这些参数与仅包含一个目标的回波的拟合参数的不同之处,以达到获取光斑中获取目标数量的目的。同时,由于已经经过最初偏正态模型的拟合,获取的参数可为下一步的波形分解提供初始参数的参考。
-
根据上述步骤获取到波形分解的初始参数,参考后能够按照明确的单目标分解和多目标分解分别展开多通道的波形分解与优化。当先验知识表示当前回波数据为单目标数据时,通过对比在不同波长通道波形的中心位置参数,根据其信噪比进行加权平均得到目标更加精确的距离信息;当先验知识表示当前回波为多目标,则首先对根据目标数量对多个目标所对应子回波的初始参数进行估计,基于信赖域参数优化[17]进行各个波长通道的波形分解计算并对分解结果的平均误差等评价参数进行计算分析,通过对分解结果设置阈值发现分解错误的通道调整初始参数进行重新分解,通过通道间波形的相互校正获取真正的波形分量参数集,达到多通道波形分解和优化的目的。
-
传统的激光雷达点云数据中,一个点所包含的信息以空间位置信息为主$ (\theta ,\varphi ,l) $,其中$ \theta ,\varphi $分别表示激光雷达扫描所对应的方位和俯仰角度,$ l $即为通过激光脉冲飞行时间所得到的目标距离。对于高光谱全波形激光雷达系统而言,在一个扫描位置$ (\theta ,\varphi ) $上所获得的是若干波长通道下的全波形数据[15],除了通过波形分解获得多个目标位置$ (\theta ,\varphi ,{l}_{1}) $, $ (\theta ,\varphi ,{l}_{2}) $······外,通过不同波长通道相同子回波幅值的相对关系能够重构出该位置目标的光谱反射率,因此该扫描位置的目标信息数据应当为$ (\theta ,\varphi ,{l}_{1},{R}_{1}(\lambda \left)\right) $, $ (\theta ,\varphi ,{l}_{2},{R}_{2}(\lambda \left)\right) $···,其中目标位置$ {l}_{i} $和相应光谱反射率$ {R}_{i}\left(\lambda \right) $可以通过上一节所属的波形分解方法获取[3],这就是点云数据处理的第一步:单点数据处理。

图 2 点云数据扩展与标识方法示意图
Figure 2. Schematic diagram of point cloud expansion and identification method
图2为所提出的基于空间-光谱信息的点云生成方法,具体如下:
(1) 单点数据处理,利用回波波形类别判断辅助得到波形分解初始参数,并通过多通道波形分解和优化,得到独立或被遮蔽的目标位置以及不同位置处的光谱反射率曲线;
(2) 点云扩展,重复上述计算步骤,获取整个扫描区域每一个空间角度$ {(\theta }_{i},{\varphi }_{j}) $的目标信息数据集合$ ({\theta }_{i},{\varphi }_{j},{l}_{1},{R}_{1}(\lambda \left)\right) $、$ ({\theta }_{i},{\varphi }_{j},{l}_{2},{R}_{2}(\lambda \left)\right) $,根据空间位置信息在三维坐标中绘制相应数据点。由于有的空间角度在波形分解后得到多个目标位置,因此根据这些数据集合绘制的点云将比原有点云数量更加丰度,这类点云扩展方法更适用于目标边缘光斑能量分裂在前后不同目标的情况或者遮蔽目标中;
(3) 点云标识完成点云空间位置的绘制后,根据每个空间位置数据中所对应的光谱反射率曲线,文中采用主成分分析首先提取其特征波长,再根据特征波长所对应的反射率数值利用随机森林算法进行分类,对反射率曲线差异较大的点用不同颜色进行标识。
-
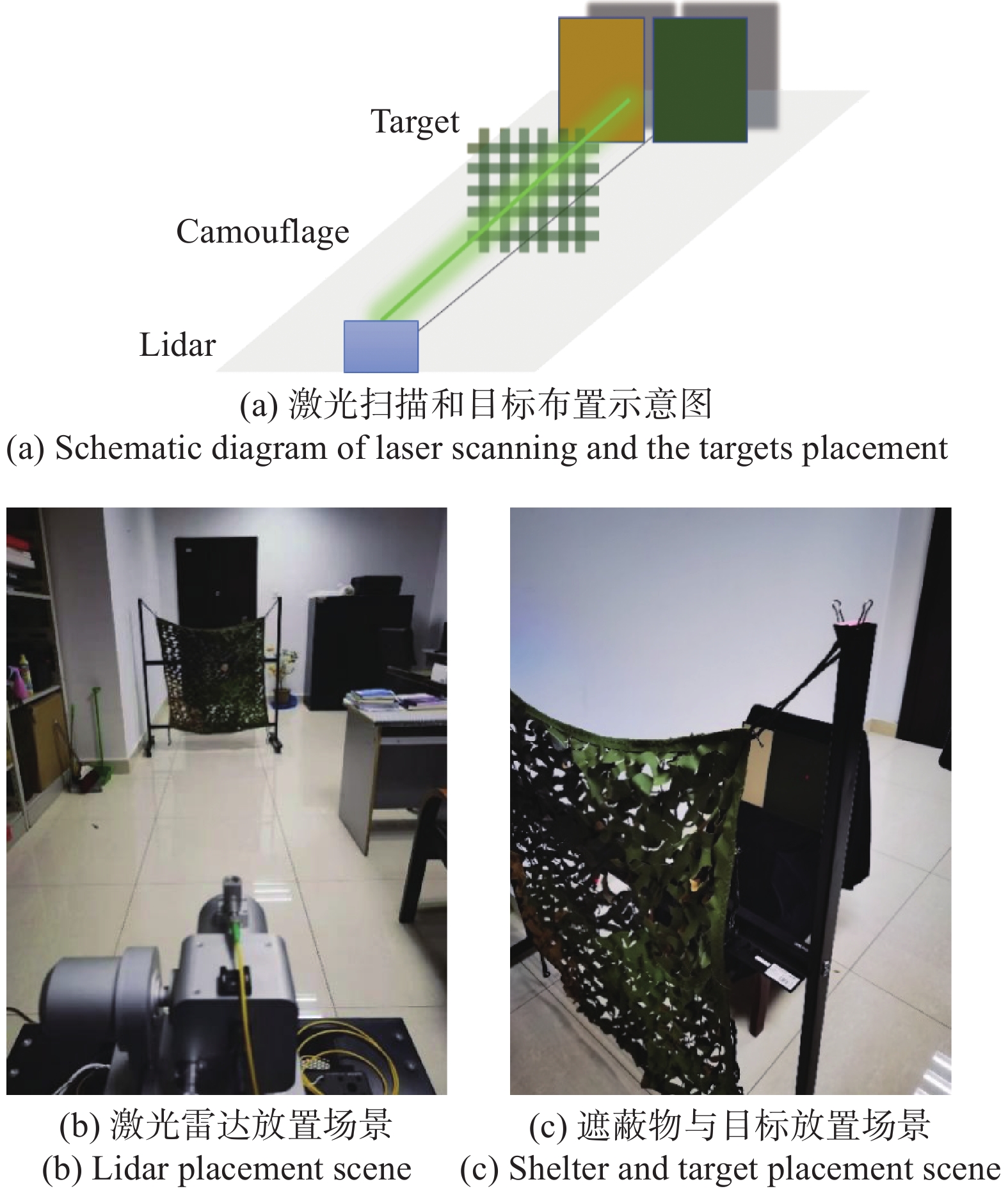
为了验证文中所提出的点云扩展和标识方法,利用高光谱全波形激光雷达开展了对伪装网遮蔽目标的探测成像实验。实验场景如图3所示,将激光雷达、伪装网和两个反射率不同的目标(目标A和目标B)沿同一轴线方向分别放置在实验平台上。激光器与伪装网距离3.9 m,伪装网和目标距离0.5 m, 利用激光雷达对上述场景进行扫描成像,收集多个波长通道的回波波形数据。
所使用的高光谱激光雷达系统由安徽建筑大学电子与信息工程学院邵慧教授课题组提供的,该系统的有效工作波长为550~1050 nm,系统选择光谱分辨率为5 nm,脉冲频率为1 kHz~1 MHz,单脉冲的最大功率超过8 μJ,光束散度为1 mrad,光束直径为10 mm,系统采用高速采集卡(采样率 5 GS/s)进行采样和存储,可同时记录发射脉冲和接收回波的波形,采样记录全波形信号[8,10-11]。
上述实验中,由于激光发散角较小同时距离较近,激光照射情况应当为:(1)光斑完全被伪装网遮蔽;(2)光斑完全投过伪装网照射到目标上;(3)光斑部分被遮蔽。因此激光回波中得到应当包含对应的三种情况:伪装网回波、目标回波、伪装网和目标共同构成的回波。
预期的实验数据处理为,通过对上述三种情况的回波波形进行处理,能够过滤掉伪装网的回波,尽可能多的得到目标回波并标记点云(将伪装网和目标共同构成的那部分回波处理为目标回波,实现点云扩展的目的)。对同一位置的目标回波而言,通过对不同通道回波强度的分析,得到该位置的光谱反射率,从而分辨该目标为目标A还是目标B,实现点云标识的目的。
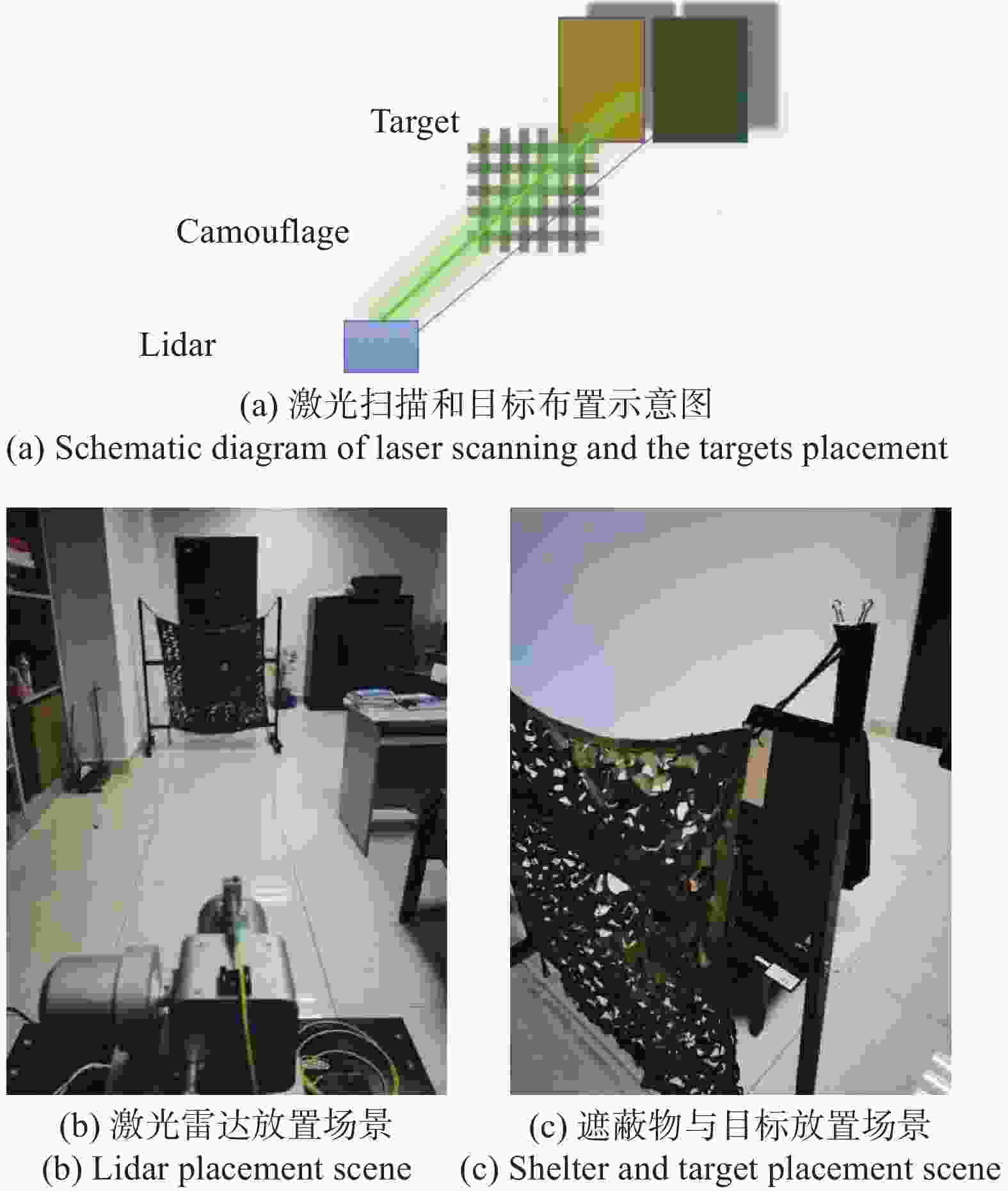
图 3 实验场景示意图
Figure 3. Schematic diagram of the experimental scene
-
通过对场景内231个空间位置的扫描,获取了被伪装网覆盖的两个目标板的高光谱全波形回波数据,波长通道数量为101,波长间隔5 nm。为了验证文中所提出波形分解方法的优势,选取了一个同时照射伪装网和目标板B的回波数据分别在600 nm、700 nm、800 nm和900 nm四个波长进行波形分解,并通过均方根误差RMSE,相对均方误差rRMSE以及相似度R2对分解结果进行评价。图4为四个波长通道回波的原始数据以及传统波形分解方法通过初始参数估计和参数优化后得到的分解结果,在600 nm和700 nm波长通道处分解出两个子回波,但其描述的目标位置为4.35 m和4.725 m与伪装网和目标板的位置相差较大,在800 nm和900 nm通道并未分解出两个目标信息,四个通道的波形分解结果。这是由于实验系统的发射激光脉宽为4 ns,其对应的距离分辨率为60 cm。实验场景中伪装网和目标间距离为50 cm,因此传统的波形分解算法无法实现有效的目标区分。

图 4 经典波形分解方法对四个波长通道回波的分解结果
Figure 4. Decomposition results of classical waveform decomposition method for echoes of four wavelength channels
采用文中所述的回波类型鉴别以及多通道波形分解与优化方法后,得到的四个通道回波波形分解结果如图5所示,由于事先进行了回波中目标个数的判别和通道间的互相校正,四个波长通道的分解结果差异较小均能够很好的得到伪装网和目标板所在实际位置3.9 m与4.42 m,与实际目标位置相符。同时由RMSE、rRMSE和R2对等指标的变化情况也可以明显看出文中波形分解方法的分解结果与原始数据的吻合度更好。
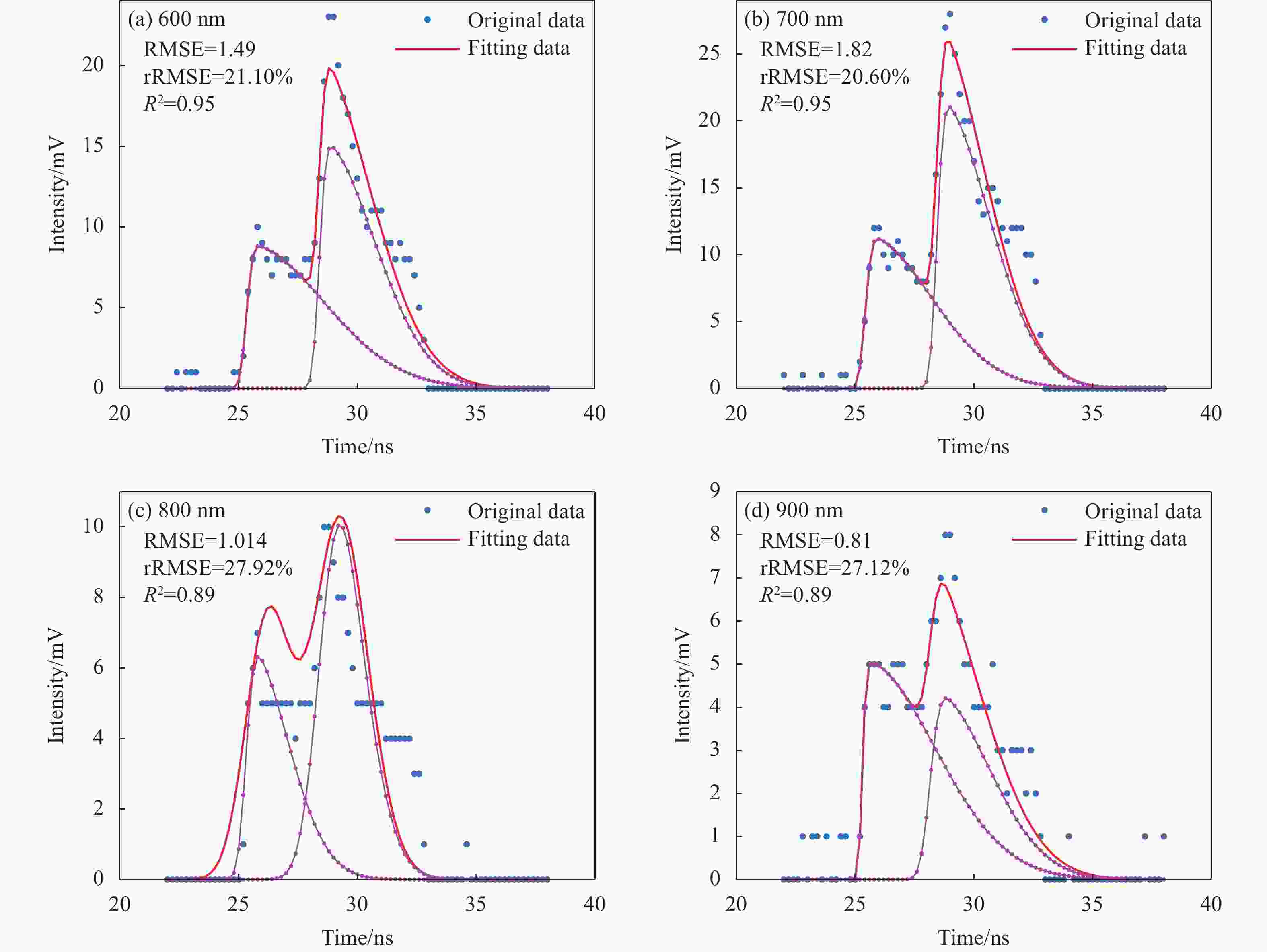
图 5 高光谱波形分解方法对四个波长通道回波的分解结果
Figure 5. Waveform decomposition results from four wavelength channels using hyperspectral waveform decomposition method
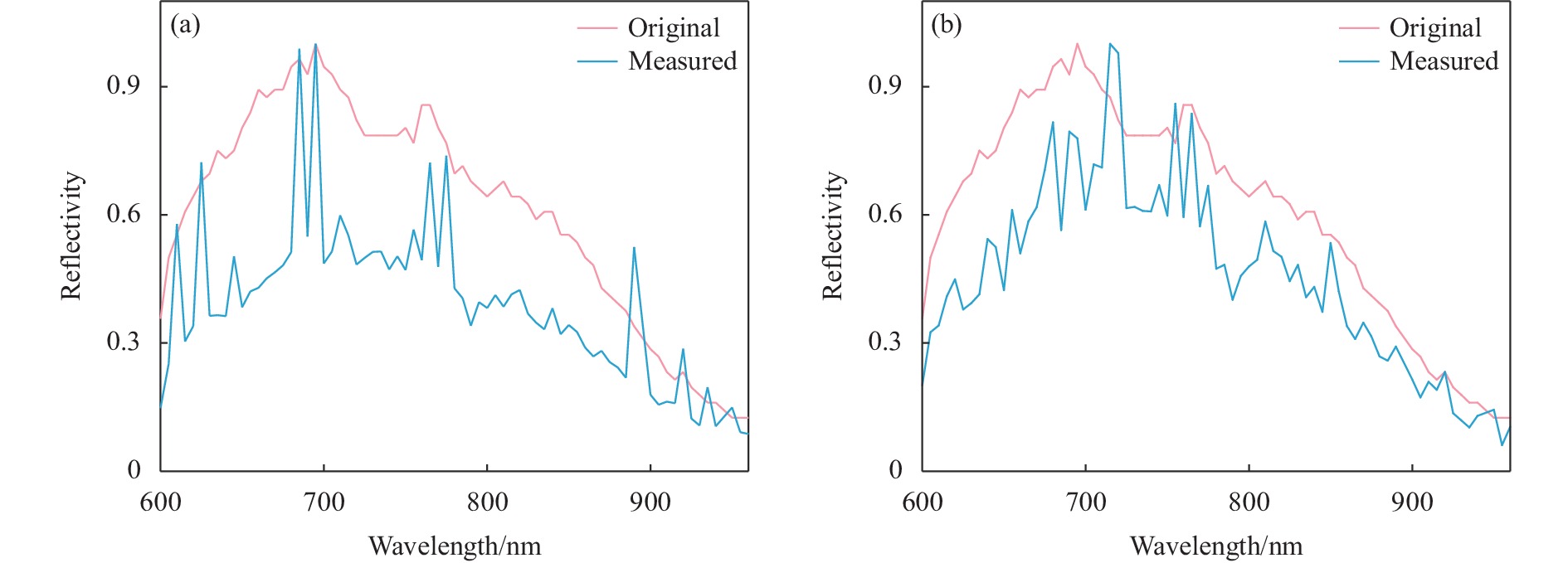
经过上述波形分解后,在得到了不同距离处目标位置的同时还获得了相应位置的光谱反射率曲线,图6(a)所示为传统波形分解方法获得的目标板B反射率曲线和无遮挡条件下(无需波形分解时)获得的反射率曲线对比,可以看到其差异十分明显,采用文中的波形分解方法获得的反射率曲线则相似度有了显著提高,使得光谱特征更加明显,有利于在点云标识时进行特征波长提取并进行更加准确的目标分类。

图 6 重构的目标光谱反射率曲线。(a)经典波形分解方法;(b)高光谱回波分解方法
Figure 6. Reconstructed targets' spectral reflectance results. (a) Classical waveform decomposition method; (b) Hyperspectral waveform decomposition method
利用文中所提出的高光谱回波波形分解方法,完成了空间-光谱信息的精准获取后,则可以进一步开展点云数据的生成、扩展与标识,如图7所示。原始的231个点云数据绝大部分点云均落在伪装网上,在目标处仅有13个数据点如图7(a)所示;经过数据处理发现有15个点存在较大误差,剩余216个点经波形分解后扩展了32个点,增补率达到300%,扩展结果如图7(b)所示。经过扩展后的点云可以明显看到伪装网后存在目标但无法区分是否为同一目标如图7(c)所示,因此需要利用光谱反射率曲线进行进一步区分。利用文中所提出的点云标识方法,通过主成分分析和随机森林算法对目标位置处的45个数据点进行了分类并按照分类结果进行颜色标识区分,得到图7(d)。可以看到标识结果能够明显区分出两块反射率不同的目标板1和目标板2。

图 7 激光点云扩展与标识结果对比。(a)原始点云; (b)扩展后; (c)标识前; (d)标识后
Figure 7. Comparison of the laser point cloud and expansion results. (a) Original point cloud; (b) After expansion; (c) Before indentification; (d) After indentification
-
文中针对高光谱全波形激光雷达的三维点云生成在进行遮蔽目标探测时遇到的近距离目标分辨难的问题,由于光斑分裂导致的光谱信息获取不准确等问题,提出了新的高光谱回波波形分解方案,并基于此给出了点云数据的扩展和标识方法。实验结果表明:即使在密集伪装网遮蔽的情况下,仍然可以通过文中所提出的波形处理方法实现准确的波形分解,和光谱重构,从而实现点云扩展和目标种类标识。当遮蔽物和目标距离小于激光脉宽所决定的分辨距离时,该方法仍具有很好的点云扩展能力。由此可以看到,虽然文中的波形分解在解决遮蔽目标光谱反射率曲线重构问题上有一定的进步,但所恢复的光谱依然与目标原始的反射率分布有一定差距,当目标分类要求较为严格或目标间光谱反射率较为接近时,这种差异会降低点云分类的准确率,有待进一步挖掘光谱产生畸变的机理并改进点云分类方法。
Lidar point cloud expansion and identification method for masking targets based on time-spectra information
-
摘要: 在利用三维激光雷达点云进行目标描述时,人们通常通过点云插值等方式描述目标细节,通过点云分类标识区分目标种类。高光谱全波形激光雷达能够通过波形分解和光谱重构实现上述功能,然而当激光束内存在多个目标形成遮蔽关系时,由于间距较近以及光斑分裂等原因,难以准确获取目标时间-光谱信息,从而无法较为精准地反演目标几何位置和反射率分布信息。文中提出了一种高光谱回波波形分解方法以及相应的点云扩展和标识方法,实现了优于激光脉宽分辨距离的波形分解和更准确的光谱重构。实验结果表明:在密集遮蔽条件下,该方法仍能达到约3倍的点云扩展效果和准确的目标分类标识。这种精准的点云扩展和标识方法能够为基于点云数据的探测、遥感情报生成提供良好的数据支撑。
-
关键词:
- 激光遥感 /
- 激光三维点云 /
- 高光谱全波形激光雷达 /
- 波形分解
Abstract:Objective With rich data and wide scanning range, three-dimensional lidar is widely used in obstacle detection, terrain reconstruction, target detection, classification and tracking, as well as forestry and agricultural remote sensing. When using point cloud data for object description, people usually describe the details of objects through point cloud interpolation, and distinguish the types of objects through point cloud classification identifiers. The above functions can be achieved with high spectral full waveform lidar through waveform decomposition and spectral reconstruction. However, when there are multiple targets in the laser beam forming a shielding relationship, due to the close spacing and light spot splitting, it is difficult to accurately obtain target time-spectral information to reverse the target position and reflectivity distribution. For this purpose, we design a hyperspectral waveform decomposition method and corresponding point cloud expansion and identification method. Methods Considering the spatial correlation and shape characteristics of the echo waveforms of various spectral channels, a new hyperspectral full waveform lidar waveform data processing method is proposed (Fig.1). Based on the prior knowledge obtained from multi-channel echo waveform comparison, inter channel correction is used to further improve the extraction accuracy of multi-target waveform components. Based on this new waveform decomposition method, the time-spectral information of the target can be accurately obtained. Accordingly, a point cloud extension and point cloud identification methods based on principal component analysis and random forest algorithm are proposed (Fig.2). Results and Discussions With a full-waveform hyperspectral lidar, camouflage nets, and two diffuse reflective plates with known reflectivity, point cloud expansion and identification verification experiments were conducted. The experiment broke through the range resolution limited by pulse width under dense shielding conditions, resulting in a triple expansion of point cloud data on the target board. The target reflectance spectrum recovered by the proposed algorithm has a high similarity to the actual reflectance spectrum of the target, and the point cloud identification result perfectly distinguishes two target plates at the same distance. Conclusions A new hyperspectral waveform decomposition scheme is proposed to solve the problems encountered in the generation of three-dimensional point clouds for hyperspectral full waveform lidar during the detection of obscured targets, such as the difficulty in resolving close range targets, and the inaccurate acquisition of spectral information caused by light spot splitting. Based on this, a method for expanding and identifying point cloud data is proposed. Experimental results show that even under dense camouflage nets, accurate waveform decomposition and spectral reconstruction can be achieved with the proposed waveform processing method, thereby achieving point cloud expansion and target type identification. When the distance between the shield and the target is smaller than the resolution distance determined by the laser pulse width, the method still has good point cloud expansion ability. -
图 1 高光谱回波波形分解方法流程图
Figure 1. Flowchart of the proposed hyperspectral waveform decomposition method
图 2 点云数据扩展与标识方法示意图
Figure 2. Schematic diagram of point cloud expansion and identification method
图 4 经典波形分解方法对四个波长通道回波的分解结果
Figure 4. Decomposition results of classical waveform decomposition method for echoes of four wavelength channels
图 5 高光谱波形分解方法对四个波长通道回波的分解结果
Figure 5. Waveform decomposition results from four wavelength channels using hyperspectral waveform decomposition method
图 6 重构的目标光谱反射率曲线。(a)经典波形分解方法;(b)高光谱回波分解方法
Figure 6. Reconstructed targets' spectral reflectance results. (a) Classical waveform decomposition method; (b) Hyperspectral waveform decomposition method
-
[1] Gong W, Shi S, Chen B, et al. Development and prospect of hyperspectral LiDAR for earth observation [J]. National Remote Sensing Bulletin, 2021, 25(1): 501-513. doi: 10.11834/jrs.20210086 [2] Mallet C, Bretar F, Roux M, et al. Relevance assessment of full-waveform lidar data for urban area classification [J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2011, 66(6): 71-84. doi: 10.1016/j.isprsjprs.2011.09.008 [3] Xia Y, Xu S, Fang J, et al. A novel waveform decomposition and spectral extraction method for 101-channel hyperspectral LiDAR [J]. Remote Sensing, 2022, 14(21): 5285. doi: 10.3390/rs14215285 [4] Hakala T, Suomalainen J, Kaasalainen S, et al. Full waveform hyperspectral LiDAR for terrestrial laser scanning [J]. Optics Express, 2012, 20(7): 7119. doi: 10.1364/OE.20.007119 [5] Wang B, Song S, Shi S, et al. Multichannel interconnection ecomposition for hyperspectral LiDAR waveforms detected from over 500 m [J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 5515714. doi: 10.1109/TGRS.2021.3108160 [6] Song S, Wang B, Gong W, et al. A new waveform decomposition method for multispectral LiDAR [J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2019, 149: 40-49. doi: 10.1016/j.isprsjprs.2019.01.014 [7] Mallet C, Bretar F. Full-waveform topographic lidar: State-of-the-art [J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2009, 64(1): 1-16. doi: 10.1016/j.isprsjprs.2008.09.007 [8] Shao H, Sa B, Li W, et al. A design and implementation of full waveform hyperspectral LiDAR for ancient architecture modelling [J]. Infrared and Laser Engineering, 2022, 51(8): 20210786. (in Chinese) doi: 10.3788/IRLA20210786 [9] Altmann Y, Maccarone A, Mccarthy A, et al. Robust spectral unmixing of sparse multispectral lidar waveforms using gamma markov random fields [J]. IEEE Transactions on Computational Imaging, 2017, 3(4): 658-670. doi: 10.1109/tci.2017.2703144 [10] Shao H, Chen Y, Yang Z, et al. A 91-channel hyperspectral LiDAR for coal/rock classification [J]. IEEE Geoscience and Remote Sensing Letters, 2020, 17(6): 1052-1056. doi: 10.1109/LGRS.2019.2937720 [11] He Zixin, Shao Hui, Guo Hang, et al. Classification of coal/rock based on hyperspectral LiDAR calibration-free signals [J]. Infrared and Laser Engineering, 2021, 50(10): 20200518. (in Chinese) doi: 10.3788/IRLA20200518 [12] Chen Y, Li W, Hyyppä J, et al. A 10-nm spectral resolution hyperspectral LiDAR system based on an acousto-optic tunable filter [J]. Sensors (Switzerland), 2019, 19(7): 1602. doi: 10.3390/s19071620 [13] Zhang C, Gao S, Li W, et al. Radiometric calibration for incidence angle, range and sub-footprint effects on hyperspectral LiDAR backscatter intensity [J]. Remote Sensing, 2020, 12(17): 1-18. doi: 10.3390/rs12172855 [14] Kaasalainen S, Malkamäki T. Potential of active multispectral lidar for detecting low reflectance targets [J]. Optics Express, 2020, 28(2): 1408. doi: 10.1364/oe.379491 [15] Liu C, Xu L, Si L, et al. A Robust deconvolution method of airborne LiDAR waveforms for dense point clouds generation in forest [J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 5700314. doi: 10.1109/TGRS.2021.3061166 [16] Zhang C. Key techniques of data processing of hyperspectral LiDAR for earth detection[D]. Beijing: University of Chinese Academy of Sciences, 2021. (in Chinese) [17] Bruggisser M, Roncat A, Schaepman M E, et al. Retrieval of higher order statistical moments from full-waveform LiDAR data for tree species classification [J]. Remote Sensing of Environment, 2017, 196: 28-41. doi: 10.1016/j.rse.2017.04.025 -

 点击查看大图
点击查看大图

计量
- 文章访问数: 96
- HTML全文浏览量: 15
- PDF下载量: 25
- 被引次数: 0

