











-
红外车辆检测技术是一种基于红外技术的非接触式车辆检测技术,通过红外传感器对路面上的车辆进行实时监测和识别。红外车辆检测具有高效、准确、无人值守等优点,在交通中的作用尤为重要。
YOLO系列算法是一种基于单阶段(one-stage)的目标检测算法,并且在速度和准确率上具有优势。YOLOv3[1]在前代基础上使用了特征金字塔结构(Feature Pyramid Network, FPN),增加了更多的先验框,进一步提升了准确率。YOLOv4[2]是目标检测领域中先进的方法之一,通过改进网络结构并采用多种优化策略取得了更好的性能表现。而YOLOv5具有高精度、快速推理和易部署等特点,被广泛应用于工业界。
基于深度学习的目标检测算法可分为两阶段算法和一阶段算法。两阶段算法通过Region Proposal Network (RPN)结构生成一系列候选框,然后对这些候选框进行分类与位置回归,如R-CNN[3]、Fast R-CNN[4]、Faster R-CNN[5];而一阶段算法不需要产生候选框,直接生成类别概率和坐标等信息,如SSD[6]、YOLO系列[7-8]等。两阶段算法检测精度较高,但速度较慢,难以完成实时检测任务。一阶段算法单次检测直接得到最终结果,但精度稍低于两阶段检测算法。
通常情况下,红外图像的分辨率比可见光图像低。这主要是由于红外光的波长较长,相同大小的探测器下包含的像素数量减少。同时,由于红外光的波长长、传输距离远,在大气中传输时会衰减,这也导致了红外图像的对比度相对较低。因此,红外小目标的边缘轮廓通常更难以辨别。为此,Li等人提出了YOLO-FIRI,将注意力机制加入残差块中,并改进CSP结构,改善网络对鲁棒性特征的学习[9]。Zhou等人设计了自适应特征提取模块,并在FPN中引入注意力机制(Coordinate Attention, CA),提高了行人红外图像的检测精度[10]。Bai等人提出了CBP-Net,设计了交叉连接的双向金字塔与区域特征增强模块,提高了模型对红外弱小目标的检测性能[11]。Lv等人在FPN中使用了双注意力机制,并使用门控聚合路径(Deep Aggregation-Gating Pathway, DAGP)增强模型对小目标的检测能力[12]。Du等人在YOLOv4基础上进行改进,引入难例挖掘模块(Hard Example Mining Module),提高了模型对遮挡车辆的识别能力[13]。Long等人通过在YOLOv5中添加CBAM注意力机制,并使用扩张卷积,解决了在复杂背景干扰下红外舰船识别率低的问题[14]。
文中针对红外车辆检测的实际需要,提出了一种改进的YOLOv5检测方法。在主干施加混合注意力机制以优化提取到的特征。优化模型Neck部分的特征融合方式,从而更高效地利用提取到的特征。使用解耦头的同时,增加了一个小目标检测层,提高模型对小目标车辆的捕获能力。为了提高模型的泛化能力,使用了由笔者自行采集、华南理工大学的SCUT_FIR_Pedestrian_Dataset[15]以及东京大学的MULTISPECTRAL DATASET[16]三部分构成的红外车辆数据集INFrared-417来训练笔者的模型。
-
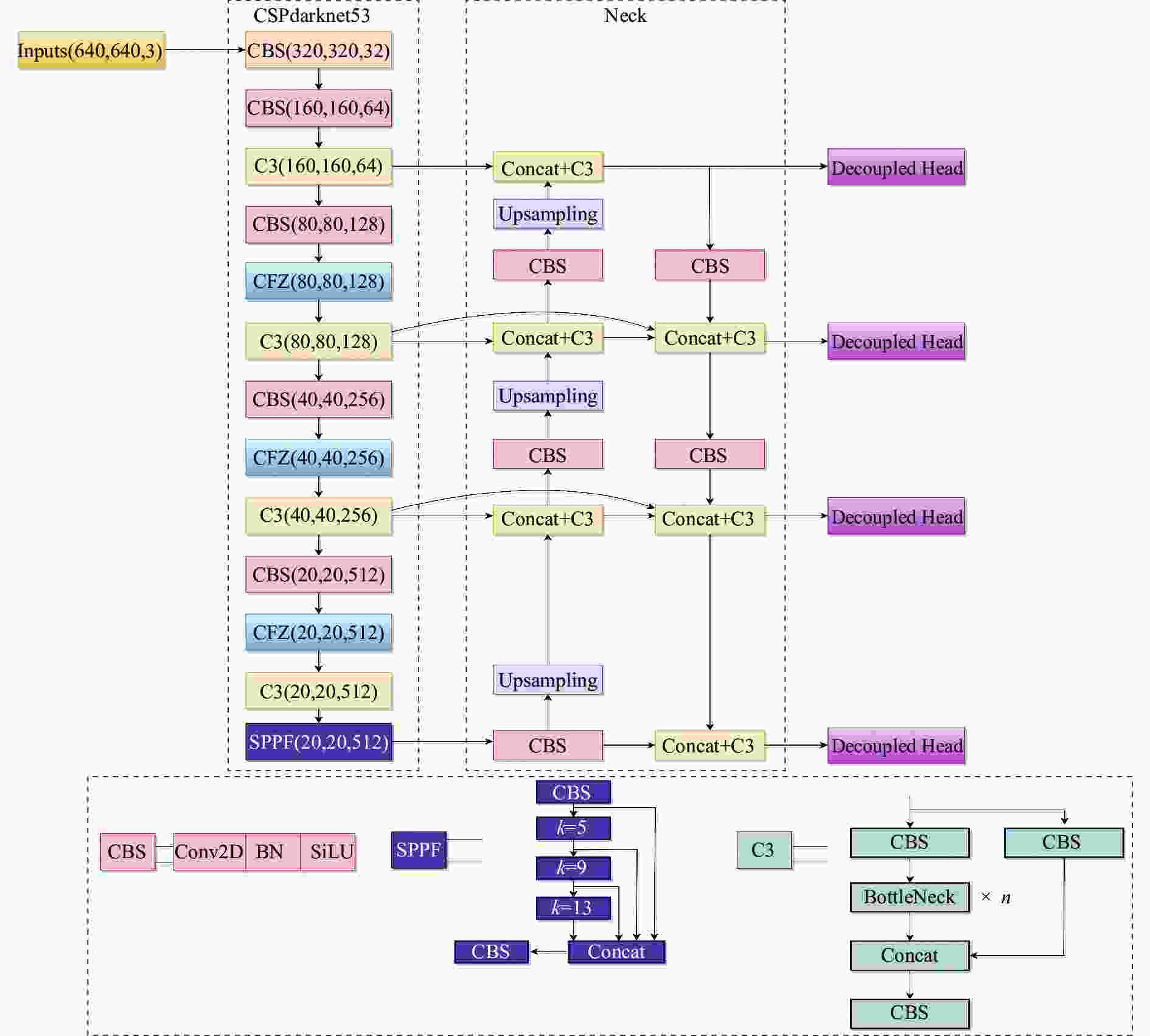
图 1 改进后的 YOLOv5 网络结构图
Figure 1. Improved YOLOv5 network architecture diagram
-
YOLOv5有Backbone、Neck、Head三个部分和四个版本s、m、l、x,选择最轻量的YOLOv5s以便于后期部署。对于车辆红外图像分辨率差、对比度低、成像模糊和小目标检测困难等问题,提出了一种改进的YOLOv5网络模型,如图1所示,其中SPPF模块采用的卷积核尺寸为5×5、9×9、13×13。C3模块主要用于学习残差特征,压缩模型参数和计算量。
-
为了抑制车辆红外图像中的噪声,文中在主干网络中引入了通道和空间混合的注意力机制模块CFG,如图2所示。

图 2 CFG 结构图
Figure 2. Structure of CFG
Squeeze-and-Excitation (SE)注意力忽略了位置信息的重要性[17],Convolutional Block Attention Module (CBAM)[18]能够自适应地对卷积神经网络中的特征图像素进行加权,增强特征表示,但在捕捉长距离依赖关系方面较差。CA是发表于CVPR2021的一种轻量型注意力机制[19],通过嵌入位置信息到通道注意力,避免在二维全局池化中位置信息的损失,还可以捕获长距离的依赖关系,故采用其作为笔者的通道注意力机制。CA结构如图3所示,其分为信息嵌入与生成注意力两个步骤。在信息嵌入部分,对于输入X,在水平坐标方向与垂直坐标方向分别使用尺寸为(H,1)或(1,W)的池化核对通道进行编码,对于高度为h的第c通道的输出可以表示为:

图 3 CA结构图
Figure 3. Structure of CA
$$ \mathop z\nolimits_c^h \left( h \right) = \frac{1}{W}\sum\limits_{0 \leqslant i < W} {\mathop x\nolimits_c } \left( {h,i} \right) $$ (1) 对宽度为w的第c通道的输出可以表示为:
$$ \mathop z\nolimits_c^w \left( w \right) = \frac{1}{H}\sum\limits_{0 \leqslant {{j}} < H} {\mathop x\nolimits_c } \left( {j,w} \right) $$ (2) 通过这两种变换聚合特征,得到一对方向感知的特征图。相较于SE产生的单一特征向量,这种转换可以让注意力模块捕捉到沿着一个空间方向的长期依赖关系,并保存沿另一个空间方向的精确位置信息,有利于模型更精确地定位目标。
对输入为C×H×W的特征图,在经过信息嵌入变换后,得到尺寸C×H×1和C×1×W的特征图,将其进行变换后进行concat操作,可表示为:
$$ f = \delta \left( {\mathop F\nolimits_1 \left( {\left[ {\mathop {{z}}\nolimits^h ,\mathop {{z}}\nolimits^w } \right]} \right)} \right) $$ (3) 之后沿着空间维度进行split操作,分别利用1×1卷积升维,结合Sigmoid激活函数得到最后的注意力向量。
空间注意力如图4所示。Spa-A模块将输入特征图C×H×W在channel维度上分别经过最大池化与平均池化进行压缩,然后进行concat操作得到2×H×W的特征图,再通过7×7的卷积核捕获空间W×H的注意力,最后通过Sigmoid激活函数生成1×H×W的注意力权值。对于输入为C×H×W的特征图,Spa-B模块先使用7×7卷积核降低通道数,得到C/4×H×W的特征图,之后再通过一个7×7卷积核增加通道数,还原特征图尺寸为C×H×W。Spa-A和Spa-B相辅相成,Spa-A模块通过最大池化与平均池化可以提取较为全面的特征,但两种池化均会造成信息损失。因此,笔者的Spa-B模块去掉池化操作以保留较为完整的特征映射。对两个模块的输出进行Add操作,得到相应的空间注意力权重。

图 4 Spatial Attention 结构图
Figure 4. Structure of Spatial Attention
CFG模块兼顾了通道信息与空间信息,首先使用通道注意力对各个通道分配权重,然后通过空间注意力对位置信息加权,得到调整后的特征。
-
一般的神经网络通常会进行多次下采样操作并在最后一层直接进行预测,这样丢失了部分信息,不利于对小目标的检测。FPN增加一条自小尺寸特征图向上的路径,在一定程度上缓和了信息丢失问题,如图5(a)所示。PANet在FPN基础上增加了一条自大尺寸特征图向下的路径,通过增加分支来增加信息流动,如图5(b)所示。BiFPN使用了高效的双向跨尺度连接,以在模型参数量不会增加太多的同时,融合更多特征并减少信息损失,如图5(c)所示。文中提出了一种Z-BiFPN结构,如图5(d)所示:将P3、P4特征图进行跨尺度连接,与BiFPN不同,笔者的跨尺度连接分别在与特征图P3、P4同等大小的特征图进行了聚合,而BiFPN将跨尺度连接引向了比P3、P4小一倍的特征图。旨在通过此种形式提高浅层信息利用率及网络对小目标车辆的检测能力。
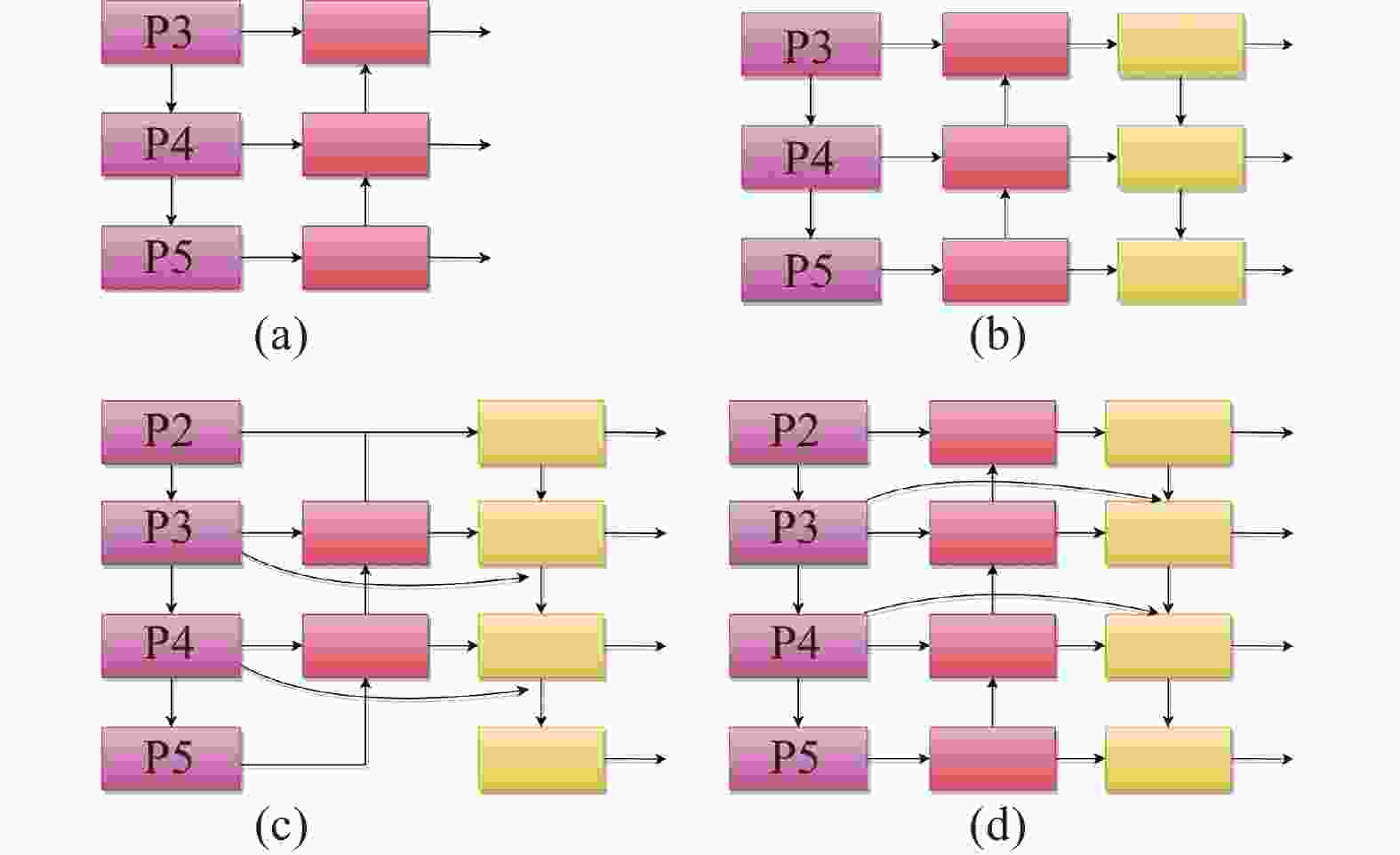
图 5 (a) FPN 结构,增加了一条自小尺寸特征图向上的路径; (b) PANet结构,在 FPN 基础上增加了一条自大尺寸向下的 路径;(c) BiFPN结构;(d) Z-BiFPN
Figure 5. (a) FPN structure, adds an upward path from small-sized feature map; (b) PANet structure, adds a downward path from large-sized feature map based on FPN; (c) BiFPN structure; (d) Z-BiFPN
-
YOLOv5有三个尺度的耦合检测头,当输入图片大小为640 pixel×640 pixel时,三个检测头的输入特征图尺寸分别为80 pixel×80 pixel、40 pixel×40 pixel、20 pixel×20 pixel。在YOLO系列版本中,YOLOX[20]已将传统的YOLO Head更换为Decoupled Head。笔者对YOLOv5检测头做出如下改进:
1)添加一个四分之一下采样的小目标检测层以更好地捕捉像素较小的车辆等目标,同时有效减少误检和漏检的情况。
2)将YOLOv5的检测头替换为Decoupled Head。如图6所示,它有三个输出,分别为cls,reg和obj。cls用于预测目标框的类别和输出分数,reg返回目标框的坐标信息进行回归预测,obj则用于判断目标框中是否有物体。传统检测头分类与回归在同一个头部结构完成,造成权重共享的问题,可能会导致模型对其中一个任务表现不足。考虑到分类和回归任务所关注的内容不同,Decoupled Head将其分离,采用不同分支完成,从而可以分别调整两个任务的权重,提高模型收敛速度及性能。

图 6 Decoupled Head 结构示意图
Figure 6. Diagram of Decoupled Head architecture
-
实验硬件所用CPU为12th Gen Intel(R) Core(TM) i9-12900 K@3.2 GHz,GPU为NVIDIA GeForce RTX4090,24 GB RAM。软件环境为CUDA11.1,torch版本1.8.1,python版本为3.8,操作系统为Ubuntu 22.04.2。实验中batch size为32,运行300个epoch,初始学习率为0.01,动量为0.937,采用余弦退火策略降低学习率,权重衰减系数为0.0005。
-
因现有公开红外车辆数据集较少,且数据来源单一,对车辆种类划分不够细致,不足以达到现代交通要求。文中所使用数据集为INFrared-417自行制作数据集,共包含公共汽车(bus)、货车(truck)、轿车(car)、面包车(van)、行人(person)、自行车(bicycle)、电动车及摩托车(elecmot)七类,其来源分别为自行采集与已有红外数据集,比例约为1.3∶1,如图7所示。对原始图像进行水平翻转后,通过逐一筛选去除部分极端图像,剩余共2186张图像。随机选取训练集、验证集、测试集比例约为8∶1∶1。

图 7 (a) 自行采集数据集实例;(b) SCUT_FIR_Pedestrian_Dataset 实例;(c) MULTISPECTRAL DATASET 实例
Figure 7. (a) An example of a self-collected dataset; (b) An example of SCUT_FIR_Pedestrian_Dataset; (c) An example of MULTISPECTRAL DATASET
使用FLIR公司的SCOUT TK来构建数据集,其波长范围为7.5~13.5 μm,分辨率为160 pixel×120 pixel,图像采集显示屏输出分辨率为320 pixel×240 pixel,视场为20°×16°。拍摄的主要场景为天津市和河北省的城区及郊区夜间,数据的采集方式主要包括图片和视频。
采用的已有数据集源自华南理工大学的SCUT_FIR_Pedestrian_Dataset[3]以及东京大学的MULTISPECTRAL DATASET[4]。SCUT_FIR_Pedestrian_Dataset由安装在汽车上的单眼FIR相机采集,空间分辨率为384 pixel×288 pixel,焦距13 mm,视场28°×21°,波长范围为8~14 μm,采集场景为广州的市中心、郊区、校园和高速公路。通过逐帧剪辑并去除大量重复图像,最终筛选出了366张包含车辆的图像,这些图像的清晰度相对较高,但小型车辆数量较多,部分图片车流密度较大。MULTISPECTRAL DATASET主要拍摄于东京大学校园,共有四组数据,分别为可见光图像、远红外图像、中红外图像及近红外图像。每组有7521帧,由RGB2、FIR3、MIR4和NIR5相机拍摄而得,这里选择视野范围较大、成像较为完整的远红外图像组。MULTISPECTRAL DATASET共包含 bike、car、car_stop、color_cone、person五种类别,经过筛选后选取85帧图像加入笔者的数据集。
将以上三组数据混合,统一尺寸为320 pixel×240 pixel,组成笔者的INFrared-417数据集进行标注。不同来源的数据具有目标大小不同、拍摄角度多变、场景多样、清晰度高低不同等特点,使模型能够更全面地学习数据特征,提高模型的泛化能力。
-
文中采用两个主要指标对模型进行评估,分别为平均精度(Average Precision, AP)、均值平均精度(mean Average Precision, mAP)。同时,还有常见指标如准确率(Precision, P)、召回率(Recall, R)的表达式分别如公式(4)、(5)所示:
$$ P = \frac{{TP}}{{TP + FP}} $$ (4) $$ R = \frac{{TP}}{{TP + FN}} $$ (5) 式中:TP、TN、FP、FN分别代表真阳性、真阴性、假阳性、假阴性。
AP、mAP表达式分别如公式(6)、(7)所示:
$$ AP = \displaystyle\int_0^1 P {{(R){\rm{d}}}}R $$ (6) $$ \begin{gathered} mAP = \frac{{\displaystyle\sum\nolimits_{i = 0}^n {AP\left( i \right)} }}{c} \\ \\ \end{gathered} $$ (7) 式中:AP代表以Precision为纵坐标、Recall为横坐标构成的曲线下的面积;mAP为所有类别的AP值的平均值,文中取IOU=0.5时的mAP值作为最终指标;c为类别数量。
-
为了进一步验证所提方法的有效性,设计了五组实验来分析不同的改进方法。采用AP、mAP以及P、R作为实验评估指标,如表1所示。
从表1可以看出,引入CFG混合注意力机制,模型可以更好地关注红外图像中的行人和自行车,从而较大提升了person类和bicycle类的检测精度,模型的准确率和召回率分别提升了2.9%和1.6%,mAP提升了0.5%。接着增加小目标检测层,提高了模型对小目标的检测能力,bus、truck、car、van类精度均有所提升,通过优化Neck部分的特征重聚方式,mAP提升了0.6%。在此基础上将检测头更换为Decoupled Head,准确率和召回率分别提升至88.2%和77.4%,mAP达85.3%,van类、person类以及bicycle类的AP显著提升,如图8所示。总之,与基线YOLOv5相比,笔者的模型实现了更好的检测准确率,如图9所示。
表 1 不同改进方法的实验结果
Table 1. Experimental results of different improvement methods
a b c d e YOLOv5s √ √ √ √ √ CFG √ √ √ √ Four Head √ √ √ Z-BiFPN √ √ Decoupled Head √ AP-bus 88.5% 85.3% 87.1% 86.0% 89.4% AP-truck 81.0% 81.2% 82.9% 81.0% 85.4% AP-car 89.6% 88.7% 89.1% 89.6% 90.3% AP-van 78.3% 76.4% 77.8% 79.8% 82.6% AP-person 79.3% 82.6% 81.0% 79.7% 83.5% AP-bicycle 72.0% 76.6% 75.7% 79.5% 86.2% AP-elecmot 79.0% 80.1% 80.2% 82.5% 79.7% P 86.5% 89.4% 85.8% 86.9% 88.2% R 73.8% 75.4% 74.7% 76.7% 77.4% mAP 81.1% 81.6% 82.0% 82.6% 85.3% 
图 8 PR 曲线。(a) YOLOv5;(b) 改进后的 YOLOv5
Figure 8. PR curve. (a) YOLOv5; (b) Improved YOLOv5

图 9 混淆矩阵。(a) YOLOv5;(b) 改进后的 YOLOv5
Figure 9. Confusion matrices. (a) YOLOv5; (b) Improved YOLOv5
-
笔者使用当前主流目标检测算法SSD、YOLOv3、YOLOR、YOLOv7-tiny、YOLOX来评估模型的性能,在INFrared-417数据集上进行了对比实验,结果如表2所示,Parameters为模型总参数量,Weight为模型生成的权重文件大小。可以看到文中的方法精度远高于其他方法,与基线相比,在参数量增加6.6 M的情况下,精度提高了4.2%。SSD对大目标有着较好的检测性能,因此对truck类检测精度最高,但由于其多次下采样得到的特征图分辨率较低,很难准确检测小目标。YOLOv3、YOLOR-W6的精度分别比文中的方法低12.3%、8.7%,且其参数量及模型权重远远高于文中的方法。YOLOv7-tiny、YOLOX的参数量与模型权重虽然比文中的方法小,但精度低了9.4%、1.8%。总而言之,文中的方法在这些模型中具有最好的检测性能。
表 2 不同目标检测算法对比
Table 2. Comparison of different object detection algorithms
Models SSD YOLOv3 YOLOv5 YOLOR-W6 YOLOv7-tiny YOLOX Ours AP-bus 76.4% 85.9% 88.5% 81.7% 85.7% 87.6% 89.4% AP-truck 88.0% 83.8% 81.0% 82.3% 82.4% 84.2% 85.4% AP-car 68.7% 83.3% 89.6% 90.1% 90.8% 90.3% 90.3% AP-van 63.2% 71.9% 78.3% 80.3% 79.2% 82.1% 82.6% AP-person 35.8% 70.1% 79.3% 76.9% 75.1% 81.5% 83.5% AP-bicycle 41.9% 50.2% 72.0% 44.7% 53.0% 78.3% 86.2% AP-elecmot 47.3% 65.6% 79.0% 80.5% 65.3% 80.7% 79.7% mAP 60.2% 73.0% 81.1% 76.6% 75.9% 83.5% 85.3% Parameters 24.4×106 61.6×106 7.0×106 79.3×106 6.0×106 8.9×106 10.4×106 Weight/MB 93.7 235.2 13.7 151.8 11.7 17.3 20.3 -
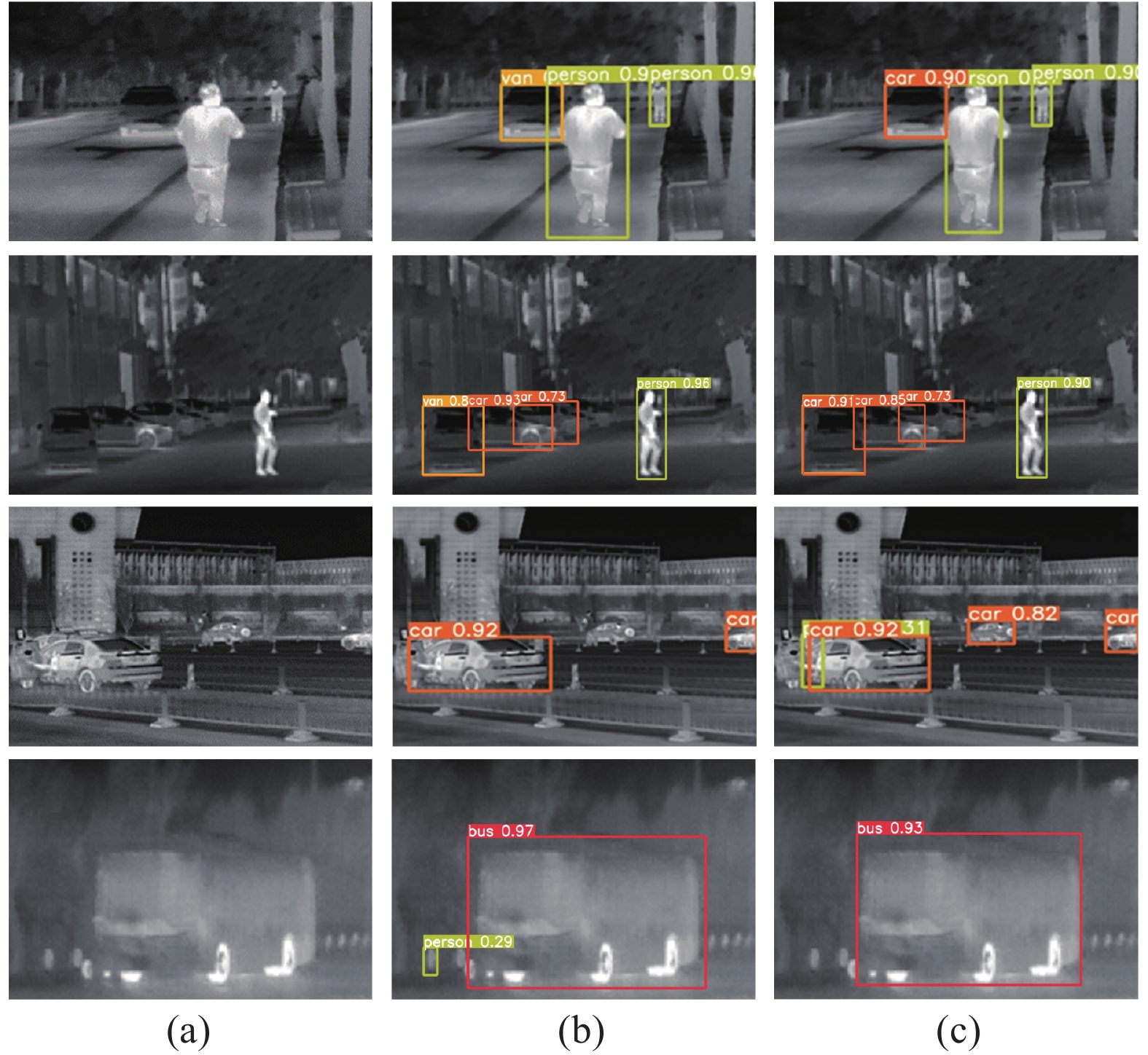
为了进一步直观显示改进模型的优势,在图10中展示了几个场景的检测对比结果。从第一、二行图中可以看出,由于对目标特征学习不充分,原始YOLOv5错将一辆汽车识别为面包车。从第三、四行图对比看出,原始YOLOv5对小目标学习能力不足,导致漏检了第三行图中的汽车以及左下角汽车里的人,并将第四行图中的路边建筑检测为行人。而文中改进后的模型对目标特征学习的更为科学、充分,同时对小目标的检测能力有所提高。

图 10 检测结果对比。(a) 原始图像;(b) YOLOv5;(c) 改进后的YOLOv5
Figure 10. Comparison of detection results. (a) Original image; (b) YOLOv5; (c) Improved YOLOv5
-
在该研究中基于YOLOv5提出了一种改进的红外车辆检测模型。通过引入混合注意力来使模型能够更好地关注图像中的车辆区域,增强模型提取特征的能力。在模型颈部使用改进后的Z-BiFPN,充分利用提取到的特征,并将其进行高效地融合。同时将检测头更换为更先进的Decoupled Head以提高检测能力,并增加一个小目标检测层去捕获小目标。在模型参数量小幅度增加的同时,mAP值从81.1%提高至85.3%,准确率提高了1.7%,召回率提高了3.6%。后续将会在嵌入式设备上对模型进行部署。
An infrared vehicle detection method based on improved YOLOv5
-
摘要: 红外图像可在低照度、恶劣天气等条件下工作,红外车辆检测技术旨在使用红外传感器来监测道路上的车辆,实现对车辆数量、车速等信息的收集与分析,该技术不仅可应用于路面车辆,还可应用于铁路、机场、港口等场景,为交通运输行业的安全和便捷提供了有效的技术支持。然而,由于红外图像成像原理的局限和外部环境的干扰,通常导致红外图像成像质量不理想,红外车辆检测仍然存在许多问题。文中提出了一种改进的YOLOv5模型,在YOLOv5的主干部分引入了混合注意力机制,使模型能够更好地关注研究者感兴趣的区域,抑制图像噪声的干扰。此外,在BiFPN基础上提出了一种改进的Z-BiFPN特征融合结构,融合更多的浅层信息,提高浅层信息利用率,并增加一个四分之一下采样的小目标检测层,同时将YOLOv5的检测头替换为解耦头来提升模型的检测能力。在自建的七类红外车辆数据集INFrared-417上进行了实验,验证了算法的有效可行性。与原始YOLOv5相比,mAP从81.1%提升到了85.3%。Abstract:
Objective Infrared image technology is capable of working in low-light and adverse weather conditions. Infrared vehicle detection technology is designed to use infrared sensors to monitor vehicles on roads, enabling the collection and analysis of information related to vehicle quantity and speed, which can be used to achieve traffic management and safety control. This technology can be applied not only to road vehicles, but also to rail transport, airports, and ports, providing effective technical support for the safety and convenience of the transportation industries. However, infrared vehicle detection still faces many challenges due to the low resolution, low contrast, and blurred edges of small targets in infrared images. Traditional hand-crafted image feature extraction methods are not adaptable nor robust, require substantial prior knowledge and have low efficiency. Therefore, this paper aims to explore deep learning-based vehicle detection models, which plays an important role in traffic regulation. Methods YOLOv5 is a one-stage object detection algorithm that is characterized by its lightweight design, ease of deployment, and high accuracy, making it widely used in industrial applications. In this paper, a CFG mixed attention mechanism (Fig.2) is introduced into the model backbone to help the model better locate the vehicle area in the image and improve its feature extraction ability, due to the low resolution of infrared images. In the feature fusion part, an improved Z-BiFPN structure (Fig.5) is proposed to incorporate more information in the shallow fusion, thereby improving the utilization of shallow information. A small object detection layer is added, and the Decoupled Head (Fig.6) is used to separate classification and regression, improving the model's ability to detect small target vehicles. Results and Discussions In order to improve the model's generalization ability, an infrared image dataset INFrared-417 (Fig.7) consisting of seven categories of bus, truck, car, van, person, bicycle and elecmot, was constructed by collecting data and combining existing infrared datasets. The main evaluation metrics used were AP (Average Precision) and mAP (mean Average Precision), with P (Precision) and R (Recall) as secondary metrics for the experiments. The ablation experiment results (Tab.1) confirmed the effectiveness and feasibility of the proposed improvement methods, with mAP improving by 4.0%, and AP significantly improving for the van, person, and bicycle categories, while P increased by 1.7% and R increased by 3.6%. In addition, the comparison results (Fig.10) demonstrated that the improved model reduced false alarm and missed detection rates, while improving the detection of small targets. The comparison experiment results (Tab.2) also showed that the proposed improved model had excellent performance in terms of detection accuracy and model parameter count. Conclusions This paper proposes an improved infrared vehicle detection algorithm. By introducing the mixed attention mechanism, the model is able to better focus on the vehicle region in the image and enhance its feature extraction ability. The improved Z-BiFPN is used in the model neck to efficiently integrate context information. At the same time, the detection head is replaced with a more advanced Decoupled Head to improve the detection ability, and a small object detection layer is added to improve the ability to capture small targets. It is hoped that this model can be applied in traffic control. -
Key words:
- infrared vehicle /
- object detection /
- attention mechanism /
- feature fusion /
- YOLOv5
-
图 5 (a) FPN 结构,增加了一条自小尺寸特征图向上的路径; (b) PANet结构,在 FPN 基础上增加了一条自大尺寸向下的 路径;(c) BiFPN结构;(d) Z-BiFPN
Figure 5. (a) FPN structure, adds an upward path from small-sized feature map; (b) PANet structure, adds a downward path from large-sized feature map based on FPN; (c) BiFPN structure; (d) Z-BiFPN
图 7 (a) 自行采集数据集实例;(b) SCUT_FIR_Pedestrian_Dataset 实例;(c) MULTISPECTRAL DATASET 实例
Figure 7. (a) An example of a self-collected dataset; (b) An example of SCUT_FIR_Pedestrian_Dataset; (c) An example of MULTISPECTRAL DATASET
图 8 PR 曲线。(a) YOLOv5;(b) 改进后的 YOLOv5
Figure 8. PR curve. (a) YOLOv5; (b) Improved YOLOv5
图 9 混淆矩阵。(a) YOLOv5;(b) 改进后的 YOLOv5
Figure 9. Confusion matrices. (a) YOLOv5; (b) Improved YOLOv5
图 10 检测结果对比。(a) 原始图像;(b) YOLOv5;(c) 改进后的YOLOv5
Figure 10. Comparison of detection results. (a) Original image; (b) YOLOv5; (c) Improved YOLOv5
表 1 不同改进方法的实验结果
Table 1. Experimental results of different improvement methods
a b c d e YOLOv5s √ √ √ √ √ CFG √ √ √ √ Four Head √ √ √ Z-BiFPN √ √ Decoupled Head √ AP-bus 88.5% 85.3% 87.1% 86.0% 89.4% AP-truck 81.0% 81.2% 82.9% 81.0% 85.4% AP-car 89.6% 88.7% 89.1% 89.6% 90.3% AP-van 78.3% 76.4% 77.8% 79.8% 82.6% AP-person 79.3% 82.6% 81.0% 79.7% 83.5% AP-bicycle 72.0% 76.6% 75.7% 79.5% 86.2% AP-elecmot 79.0% 80.1% 80.2% 82.5% 79.7% P 86.5% 89.4% 85.8% 86.9% 88.2% R 73.8% 75.4% 74.7% 76.7% 77.4% mAP 81.1% 81.6% 82.0% 82.6% 85.3%  下载: 导出CSV
下载: 导出CSV
表 2 不同目标检测算法对比
Table 2. Comparison of different object detection algorithms
Models SSD YOLOv3 YOLOv5 YOLOR-W6 YOLOv7-tiny YOLOX Ours AP-bus 76.4% 85.9% 88.5% 81.7% 85.7% 87.6% 89.4% AP-truck 88.0% 83.8% 81.0% 82.3% 82.4% 84.2% 85.4% AP-car 68.7% 83.3% 89.6% 90.1% 90.8% 90.3% 90.3% AP-van 63.2% 71.9% 78.3% 80.3% 79.2% 82.1% 82.6% AP-person 35.8% 70.1% 79.3% 76.9% 75.1% 81.5% 83.5% AP-bicycle 41.9% 50.2% 72.0% 44.7% 53.0% 78.3% 86.2% AP-elecmot 47.3% 65.6% 79.0% 80.5% 65.3% 80.7% 79.7% mAP 60.2% 73.0% 81.1% 76.6% 75.9% 83.5% 85.3% Parameters 24.4×106 61.6×106 7.0×106 79.3×106 6.0×106 8.9×106 10.4×106 Weight/MB 93.7 235.2 13.7 151.8 11.7 17.3 20.3
下载: 导出CSV
-
[1] Zhang X X, Zhu X. An efficient and scene-adaptive algorithm for vehicle detection in aerial images using an improved YOLOv3 framework [J]. ISPRS International Journal of Geo-information, 2019, 8(11): 483. doi: 10.3390/ijgi8110483 [2] Zhu Q F, Zheng H F, Wang Y B, et al. Study on the evaluation method of sound phase cloud maps based on an improved YOLOv4 algorithm [J]. Sensors, 2020, 20(15): 4314. doi: 10.3390/s20154314 [3] Girshick R, Donahue J, Darrell T, et al. Rich feature hierarchies for accurate object detection and semantic segmentation[C]//2014 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2014: 580-587. [4] Girshick R. Fast R-CNN [C]//2015 IEEE International Conference on Computer Vision (ICCV), 2015: 1440-1448. [5] Ren S, He K, Girshick R, et al. Faster R-CNN: towards real-time object detection with region proposal networks [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(6): 1137-1149. doi: 10.1109/TPAMI.2016.2577031 [6] Liu W, Anguelov D, Erhan D, et al. SSD: Single shot multibox detector [C]//Computer Vision-ECCV 2016, 2016, 9905: 21-37. [7] Redmon J, Divvala S, Girshick R, et al. You only look once: unified, real-time object detection [C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2016: 779-788. [8] Redmon J, Farhadi A. YOLO9000: better, faster, stronger [C]//30th IEEE Conference on Computer Vision and Pattern Recognition (CVPR 2017), 2017: 6517-6525. [9] Li S, Li Y, Li Y, et al. YOLO-FIRI: improved YOLOv5 for infrared image object detection [J]. IEEE Access, 2021, 9: 141861-141875. doi: 10.1109/ACCESS.2021.3120870 [10] Zhou L, Gao S, Wang S, et al. IPD-Net: infrared pedestrian detection network via adaptive feature extraction and coordinate information fusion [J]. Sensors, 2022, 22(22): 8966. doi: 10.3390/s22228966 [11] Bai Y, Li R, Gou S, et al. Cross-connected bidirectional pyramid network for infrared small-dim target detection [J]. IEEE Geoscience and Remote Sensing Letters, 2022, 19: 7506405. [12] Lv G, Dong L, Liang J, et al. Novel asymmetric pyramid aggregation network for infrared dim and small target detection [J]. Remote Sensing, 2022, 14(22): 5643. doi: 10.3390/rs14225643 [13] Du S, Zhang P, Zhang B, et al. Weak and occluded vehicle detection in complex infrared environment based on improved YOLOv4 [J]. IEEE Access, 2021, 9: 25671-25680. doi: 10.1109/ACCESS.2021.3057723 [14] Long Y, Jin D, Wu Z, et al. Accurate identification of infrared ship in island-shore background based on visual attention [C]//2022 IEEE Asia-Pacific Conference on Image Processing, Electronics and Computers (IPEC), 2022: 800-806. [15] Xu Z, Zhuang J, Liu Q, et al. Benchmarking a large-scale FIR dataset for on-road pedestrian detection [J]. Infrared Physics & Technology, 2019, 96: 199-208. [16] Karasawa T, Watanabe K, Ha Q, et al. Multispectral object detection for autonomous vehicles [C]//Proceedings of The Thematic Workshops of ACM Multimedia 2017 (Thematic Workshops' 17), 2017: 35-43. [17] Hu J, Shen L, Sun G, et al. Squeeze-and-excitation networks [C]//2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2018: 7132-7141. [18] Woo S, Park J, Lee J-Y, et al. CBAM: convolutional block attention module [C]//Computer Vision-ECCV 2018, PT VII, 2018, 11211: 3-19. [19] Hou Q, Zhou D, Feng J, et al. Coordinate attention for efficient mobile network design [C]//2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition, CVPR 2021, 2021: 13708-13717. [20] Song J Y, Zhao Y, Song W L, et al. Fisheye image detection of trees using improved YOLOX for tree height estimation [J]. Sensors, 2022, 22(10): 3636. doi: 10.3390/s22103636 -

 点击查看大图
点击查看大图

计量
- 文章访问数: 207
- HTML全文浏览量: 82
- PDF下载量: 72
- 被引次数: 0

