



 下载:
下载:




-
现代高速固定翼飞机的外挂式多功能光电瞄准吊舱(以后简称吊舱,英文pod;半埋的球形吊舱英文为turret,二者有所区别)采用大长细比雪茄外形,配置激光测照器、前视红外成像和电视等成像探测装置,主要用于对地精确打击,其作战场景主要通过图像识别发现、确认、瞄准目标,通过激光测距和惯性器件测角测姿计算射击诸元,满足发射条件后发射制导武器,包括给半主动激光制导弹药提供激光照射导引任务;或者为图像制导武器提供目标信息和图像模板;或者确定出目标地理坐标召唤地炮火力覆盖。目前公认的吊舱技术已经发展了三代:第一代以1970年开发的AN/AVQ-10 PAVE KNIFE,AN/AVQ-26 PAVE TACK以及AN/ASQ-153 PAVE SPIKE为代表,装备白光/微光探测器和激光发射/照射器,可在白天净空条件下为激光半主动制导炸弹提供目标指示和照射,作用距离在10 km左右,功能单一,在技术上处于萌芽状态;第二代吊舱在1980年中期服役,以美国“LANTIRN” AN/AAQ-14、AN/ASQ-38 “Nite Hawk”和法国ATLIS为代表,作用距离15 km左右,集成了前视红外成像探测和激光测距/照射功能,提高了恶劣战场环境下的作战能力,前两者还能够全天时工作,而后者的一些设计理念为第三代的AN/AAQ-33吊舱(马丁·玛丽埃塔公司参与了ATLISⅡ吊舱的设计定型)所继承;第三代吊舱在2003年开始服役,以AN/AAQ-33 Sniper XR ATP吊舱、AN/ASQ-228 ATFLIR吊舱、AN/AAQ-28 Litening吊舱和法国Damocles吊舱为代表,作用距离30~40 km,通常采用中波、近红外成像探测,双波段激光测距/照射,具有激光半主动制导、图像模板匹配制导、地理坐标定位、侦察、搜救等功能,其改进型还具有针对人员目标的精确打击能力;2015年后,以色列和法国相继公开了下一代吊舱Litening 5和Talios,比第三代吊舱提高了约1/3的角分辨率并扩展了探测波段,提高了对地面复杂背景小多/动目标的自动识别、跟踪和定位能力,采用新型数据链进一步提高了非传统情报、监视和侦察的网络化作战能力。
如同手机的代次划分,光电瞄准吊舱已从单一功能机时代向智能机时代转变。文中仅从探测系统角度对比分析了国外主流吊舱探测系统的技术特点和性能指标,提出了新一代吊舱探测系统的发展方向。
-
光电瞄准吊舱从结构上可分为三个舱段:头舱、电子舱和尾舱。其中,头舱为主要功能舱段,通常包括球形光电舱和横滚舱,集成了所有光电探测设备,主要包括三个子系统:激光子系统(主要包括激光器、激光发射天线、激光测距接收天线、激光光斑跟踪器、激光指示器等)、光学成像子系统(红外/光电成像系统等)、伺服稳定控制子系统(俯仰/方位/横滚伺服稳定平台、惯性组件等);横滚舱有热交换器和横滚伺服机构,往往还通过光学铰链集成了激光发射系统和后置成像系统(Sniper XR吊舱将光学舱和横滚舱合而为一);电子舱位于中段,通过电气滑环与头舱连接,主要包括:吊舱和飞机的接口、电源、换热器、综合控制器、信息处理器、数据记录仪、数据链等,按功能模块集成在航空ATR机箱便于故障检测、维护和现场更换(LRU);尾舱包括环控设备(小型涡轮增压压气机及换热器,或涡轮发电机),为头舱供冷或致热以保证工作温度(红外成像系统在冷环境工作较为有利,而电子设备在超低温环境又难以启动)和数据链天线等。结构组成以Sniper XR吊舱为例,如图1所示。
由于受到气动外形限制,吊舱的舱径一般不超过406 mm,长度不超过3 m,质量在300 kg以内。受限的舱径需要将激光、成像、伺服稳定控制子系统高度集成,这里统称为探测系统,以满足远程探测需要。由于壳体、结构、光路和框架平台的限制,三代吊舱的光舱比(各波段的通光孔径与吊舱舱径之比作为集成度的衡量标准,简称光舱比)一般为0.4~0.5。更大的光舱比意味着更大的光学接收口径、更长的焦距和更高的稳定精度要求,方法包括:选择合适的构架;共光路(多个光学探测通道共用一个光路,但不一定使用相同的口径)或共孔径(多个波段共用一个光路,且有相同孔径)设计和布局;光机和伺服平台一体化设计;采用小型化轻量化和精度更高的元器件等。
制约探测系统性能的主要因素是基础工业和元器件水平,以及研发/使用单位的研发基础和技术传承。其中激光技术、成像技术和伺服控制技术在各代吊舱中扮演了不同角色:
第一代吊舱主要解决有无问题,主要为半主动激光制导炸弹提供激光照射导引任务,围绕激光器如何在机载环境下可靠使用进行总体设计。采用的灯泵激光器电光转换效率低,体积大,功耗高,光束质量差,器件灵敏度较低。5~10 km的作用距离在导引激光半主动制导炸弹时往往需要抵近飞行、临空投掷、尾后或侧后照射;为提高精度和降低战损率,大量采用特种部队进行空地协同,载机确定好射击诸元发射弹药后高机动脱离,不再提供照射,而让激光制导炸弹与地照器配合使用;成像探测器以PAL制式的白光电视为主,采用光机扫描探测的前视红外系统(如AN/AVQ-26 PAVE TACK)则系统体积庞大,可靠性低。
第二代吊舱的出现是为了解决一代吊舱全天时作战能力不足、作用距离过近的问题,着重提升了成像器在吊舱系统中的设计权重,但使用场景仍以为激光半主动制导炸弹提供照射导引任务为主,兼顾为图像制导武器(如小牛空地导弹的图像导引头)提供坐标引导信息(由于信息处理水平限制,还不能提供实时图像模板,导弹还得具备发射前锁定功能)。比如具有代表意义的LANTRIN AN/AAQ-14吊舱,为提高发现识别距离,在光学头舱内配置了前视红外成像系统,探测器组件可独立作横滚运动以消像旋;采用320×256面阵的长波制冷型红外探测器,最高角分辨率约0.1 mrad (改进型增加了电视成像通道)。该型吊舱采用了改进型灯泵激光器,测距距离约25 km,照射距离约15 km,为野战点防御系统的射程上限;为了给成像系统腾出宝贵的头舱空间,将激光器置于横滚舱段而非球形的光学头舱,通过光学铰链导入光学头舱的激光发射天线。过长的光路、过多的旋转部件(横滚舱到光学舱的光学铰链以及红外探测器的旋转轴),在机载的高温梯度环境和内外压差环境下不可避免地造成了激光轴和成像轴的漂移问题,而红外图像在感官和分辨率上始终不如电视系统,成为第三代吊舱研发的必解问题。
随着激光技术、光学技术、探测器技术和伺服稳定控制技术的不断进步,赋予第三代吊舱探测系统更大的设计自由度,同时也对激光、光学和控制子系统提出了一体化设计的要求,主要采用两种解决思路:串联布局的共光路设计和并联布局的共光舱设计。前者以AN/AAQ-33Sniper XR和AN/ASQ-228ATFLIR吊舱为代表,后者以Litening和Damocles吊舱为代表。第三代吊舱成像系统普遍采用中波红外和近红外两个波段,其中:中波红外成像系统采用640×512或640×480面阵15 μm×15 μm像元F#4的中波红外(3~5 μm)探测器,双视场或三视场,分别为瞄准视场(约1º)、搜索视场(为小视场的4~6倍),导航视场(约18º×24º),长焦角分辨率约25 μrad;近红外(0.7~0.9 μm)波段采用1280×1024面阵高清相机,长焦角分辨率约为10~15 μrad;激光器普遍采用二极管泵浦激光器(Diode Pump Laser, DPL)和光学参量振荡器技术(Optical Parametric Oscillator, OPO),有1.064 μm和1.57 μm两个激光波段,其中1.064 μm的测距距离可达到50 km左右,并可为激光半主动制导武器提供20 km以上的照射距离;人眼安全激光(1.57 μm)一般用于测距和训练,作用距离在15 km以上。为满足不断提高的成像分辨率,伺服稳定系统采用了中等精度的IMU(Inertial Measurement Unit)和粗精二级稳定框架平台结构(多为三轴五框结构)以实现对方位/俯仰/横滚三个轴系的稳定,以及基于快速反射镜(Fast Steering Mirror, FSM)[1]的复合轴控制系统以提高稳定和跟踪精度。在对半主动激光制导武器进行照射制导的基础上还增加了实时图像模板生成功能,可将目标模板信息实时输入导引头实现发射后不管,甚至可通过弹载数据链实现发射后锁定和目标临时更换;增加了地理坐标定位系统,即通过激光测距和伺服框架的定位定向,综合惯组获得的姿态信息解算目标地理坐标位置,为其他火力单元提供打击信息。
随着低烈度作战对非传统情报、监视、侦察NTISR (Non-Traditional Intelligence, Surveillance, and Reconnaissance)能力的需要,又对智能化探测和网络化作战提出了新的要求,顺应出现了号称第四代的Litening 5和Talios吊舱,包括持续改进激光、成像和伺服稳定控制子系统,提高探测识别能力(更多的成像波段、更高的成像分辨率),提高跟踪器在空/地复杂背景下多个目标稳定探测、识别、跟踪、辨认和定位的能力;提高空地协同组网作战效率,为其他作战平台提供精确的目标信息并能够准确探测识别其他作战平台发布/指示的目标。此时的设计权重又转移到信息处理系统上。
-
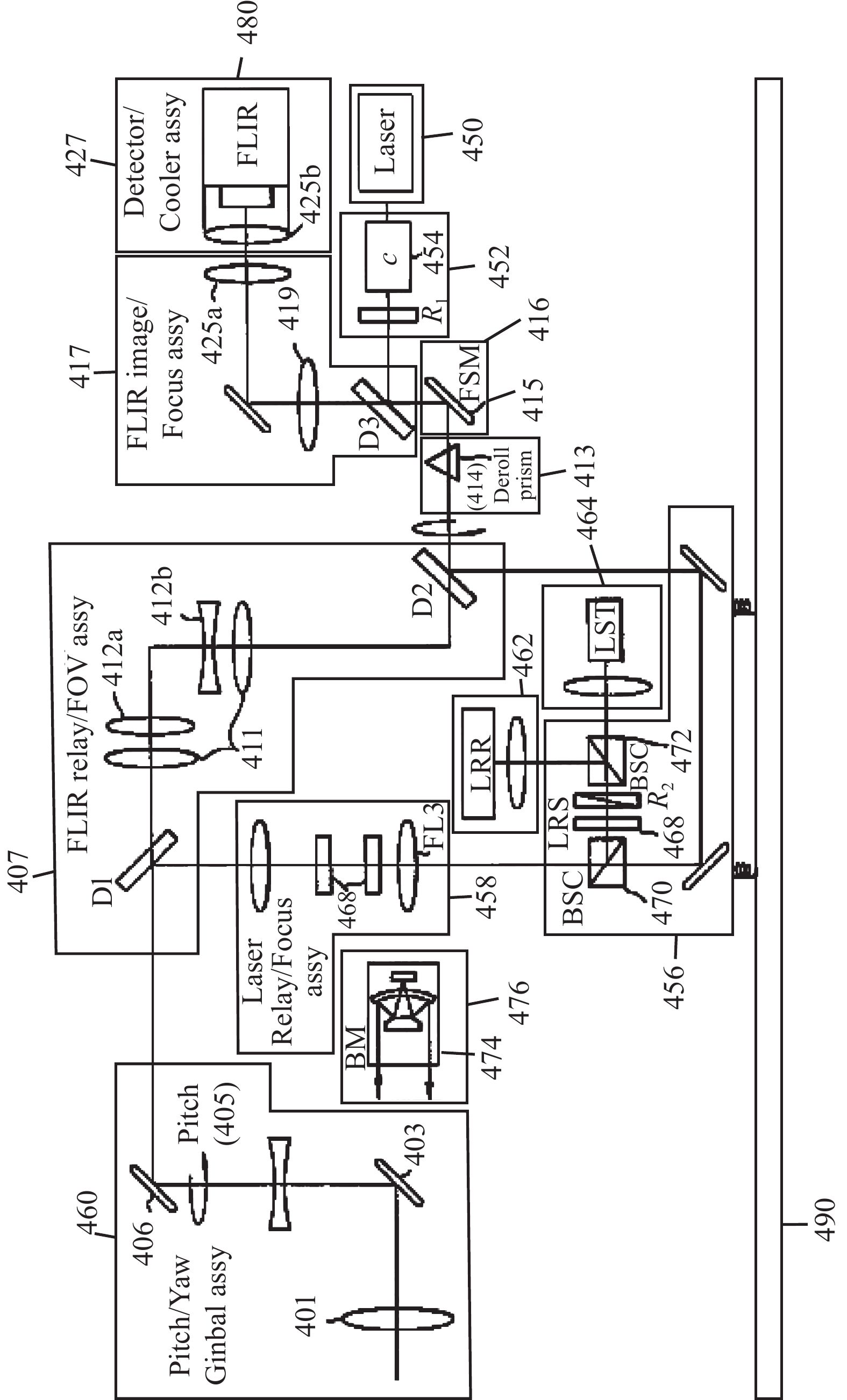
洛马公司的AN/AAQ-33 “Sniper XR” ATP吊舱将光电头舱和横滚舱融为一体,采用了三块蓝宝石窗口拼接的楔状外形以提供较大的气密空间(图1),有利于高速飞行和减小雷达截面;整个头舱可横滚指向;探测装置的构架为:俯仰/方位框架平台稳定的透射式前置望远系统组件(集成光斑跟踪、激光测距接收、近红外成像组件)+光学铰链(包括FSM)+消像旋组件+后置中波红外成像组件和激光发射组件。整个光机组件通过被动减震器“浮动”置于光具座上,前置望远系统的俯仰/方位轴进行光轴指向和稳定,FSM进行精稳和补偿。详细的光路信息流向为图2[2]所示。

图 1 多功能光电瞄准吊舱组成
Figure 1. Composition structure of multi-roles EO targeting pod
图 2 Sniper XR吊舱的光路布局
Figure 2. Optical layout of Sniper XR pod
目标的中/近红外辐射、激光回波通过460透射式物镜在D1分光镜分光,分别进入458激光发射/电视接收镜组方向的电视/激光接收支路和411方向的中波红外接收支路(其中电视接收支路在图2中未画出,在458和456之间通过分光镜与激光接收支路分开);激光接收支路包括激光测距接收组件LRR和激光光斑跟踪组件LST);中波红外光束经过411镜组后形成平行出射的出瞳光束;经413消像旋组件和416 FSM精稳组件以及D3分光镜后进入417中波红外后置成像光学系统,在427探测器组件成像。
450激光器发出的激光经452补偿器组件在D3分光反射镜处反射,经416 FSM组件反射后进入413消像旋组件;413消像旋组件主体为一个道威尔棱镜414,可在平行光束中以1∶2的比例消除像旋;激光束在D2处反射进入图3中的456组件,经470偏振分光镜进入图2中的458激光发射/电视接收镜组,并经D1反射进入物镜460扩束并发射向目标。

图 3 折叠后的前置望远系统中红外通道与Sniper XR吊舱轴系对比
Figure 3. Comparison of mid-infrared path of folded front telescope system and Sniper XR pod’s axis
为避免激光束的后向散射造成激光测距和光斑跟踪探测器的饱和,在450激光器的激光束出射端有452补偿器组件,包括一组R1莱斯利棱镜用于补偿激光与红外通道的光轴误差;以及454补偿单元(包括一片λ/4和一片λ/2波片)用于调整发射激光因414道威尔棱镜旋转产生的偏振态扰动以保证出射到470分光棱镜的激光为线偏光,并能调节出射光的能量水平(如内校轴时需要降低激光能量,工作时需要最大的激光能量)。
激光回波为任意偏振态,从460物镜经D1、458激光发射/电视接收镜组和470分光棱镜后进入456激光接收组件,然后经466λ/2波片确定回波进入LRR激光测距光路还是LST光斑探测光路;R2莱斯利棱镜组也用于在内校轴时校准激光发射轴和接收轴的视线误差;激光回波经472分束棱镜分别导入激光测距探测器组件LRR和LST激光光斑跟踪组件。内置476小型反射式平行光管作为校轴基准。
系统为六轴稳定平台,包括1) 前置望远系统460物镜组件在405方位内框(5º左右有限转角),2) D2折叠分光镜和413道威尔棱镜之间的俯仰外框(360º转角),3) 横滚框(图2中未画),4) 413消像旋组件, 5)和6) 用于精稳的415两轴FSM。系统通过被动减震器整体置于“浮动”头舱内的490光具座上以隔离高频振动;490光具座置于横滚框上。
激光器工作在DPL+OPO制式的双波段激光,在1.064 μm波段能量大于90 mJ (也有报道大于150 mJ),光束质量优于9 mm·mrad,测距距离大于37 km,脉宽约20 ns;1.57 μm波段人员安全激光能量大于26 mJ (或40 mJ)。
该系统的红外成像通道视场角为1.2º和3.8º两个对角视场,经推算其系统焦距约为590~600 mm,角分辨率为25 μrad;电视通道角分辨率为红外通道的2倍,即12.5 μrad。由此推算光学系统小视场的通光口径在150 mm左右,光舱比约为0.492。
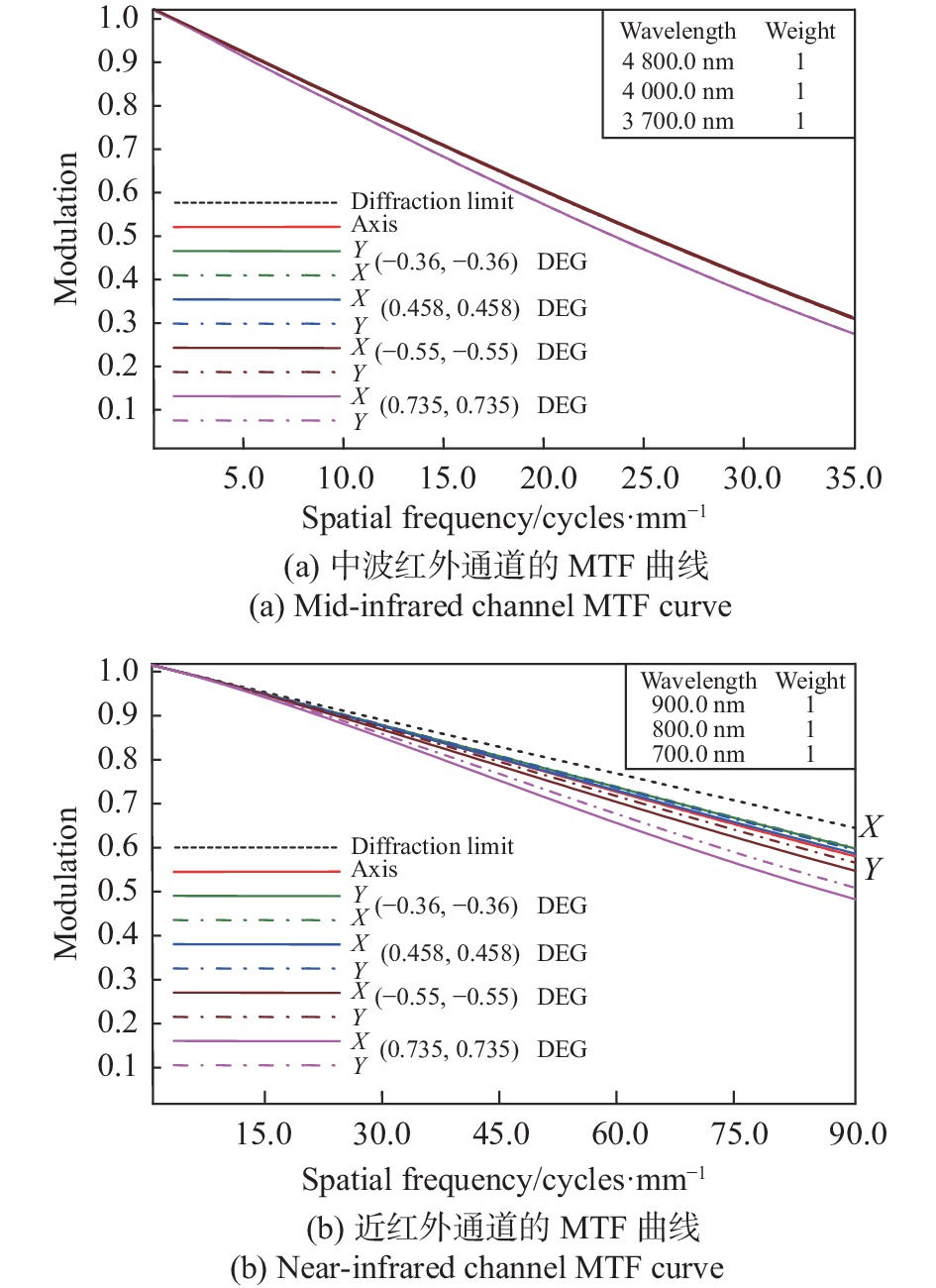
根据文献[2]正向设计了一个8倍透射式前置望远系统(如图4所示),采用了卤族化合物和硫系化合物光学材料组合搭配,在折叠反射镜C之前皆为球面,成像波段为0.7~0.9 μm和3.7~4.8 μm,视场角约1.5º×1.5º,通光口径150 mm,焦距600 mm,F#4,设计的MTF接近衍射限;折叠后的尺寸为254 mm (长)×185 mm (宽)×235 mm (高),俯仰旋转部分的最大尺寸约270 mm,足以放进305 mm的舱径[3]。

图 4 两个成像通道的MTF曲线
Figure 4. MTF curves of two image path
采用透射式前置望远系统的优点是口径最大的物镜置于光路最前部,经物镜压缩后的光路便于折叠,空间利用率高;视场大;可尽量采用球面透镜,加工/检测/装配简单,利于批量生产;采用四光合一(中波红外成像、近红外成像、激光发射/接收和光斑跟踪)的光学设计可保证激光照射轴即为瞄准线跟踪轴。但该光学系统的缺点也很明显:受制于透镜材料的色差,使用波段难以扩展;而激光发射系统对镀膜、后向反射抑制、材料制备等均提出了严格要求;而过多的镜片又增加了冷反射抑制、消鬼像、消热差等光学设计的难度;在汇聚光路中采用光学铰链以实现俯仰和偏航转动,对结构、轴承的要求极高——这也是其不得不采用激光发射与光学探测共光路的一个原因;偏振滤光实现激光发射/接收共光路不可避免造成能量损失,且需要动态实时起偏,控制系统复杂。
2013年开始对Sniper XR ATP吊舱进行现代化改造,升级为Sniper SE,重点改进激光测距系统的光束质量,提高激光测距系统的探测灵敏度,以提高激光测距照射通道的作用距离和精度;红外探测器从640×512面阵更新为1 k规模(采用了新型高灵敏度10 μm×10 μm像元间距F#4探测器);加强空地协同高速视频双向图传数据链;加强地理坐标定位精度;增加对空中目标的探测、跟踪能力;提高复杂背景下对小型运动目标的多目标跟踪能力;最重要的改进是安装双向高速视频数据链,为其他作战平台提供准实时的动态图像信息。以上改进使吊舱地面分辨率比Sniper XR提高了近1倍,信息化和智能化程度大为提高。
由于体积小、质量轻,气动外形好,气密性和光轴一致性好,且价格适中,被认为是美国现役最优秀(而非最先进)的光电瞄准吊舱。
-
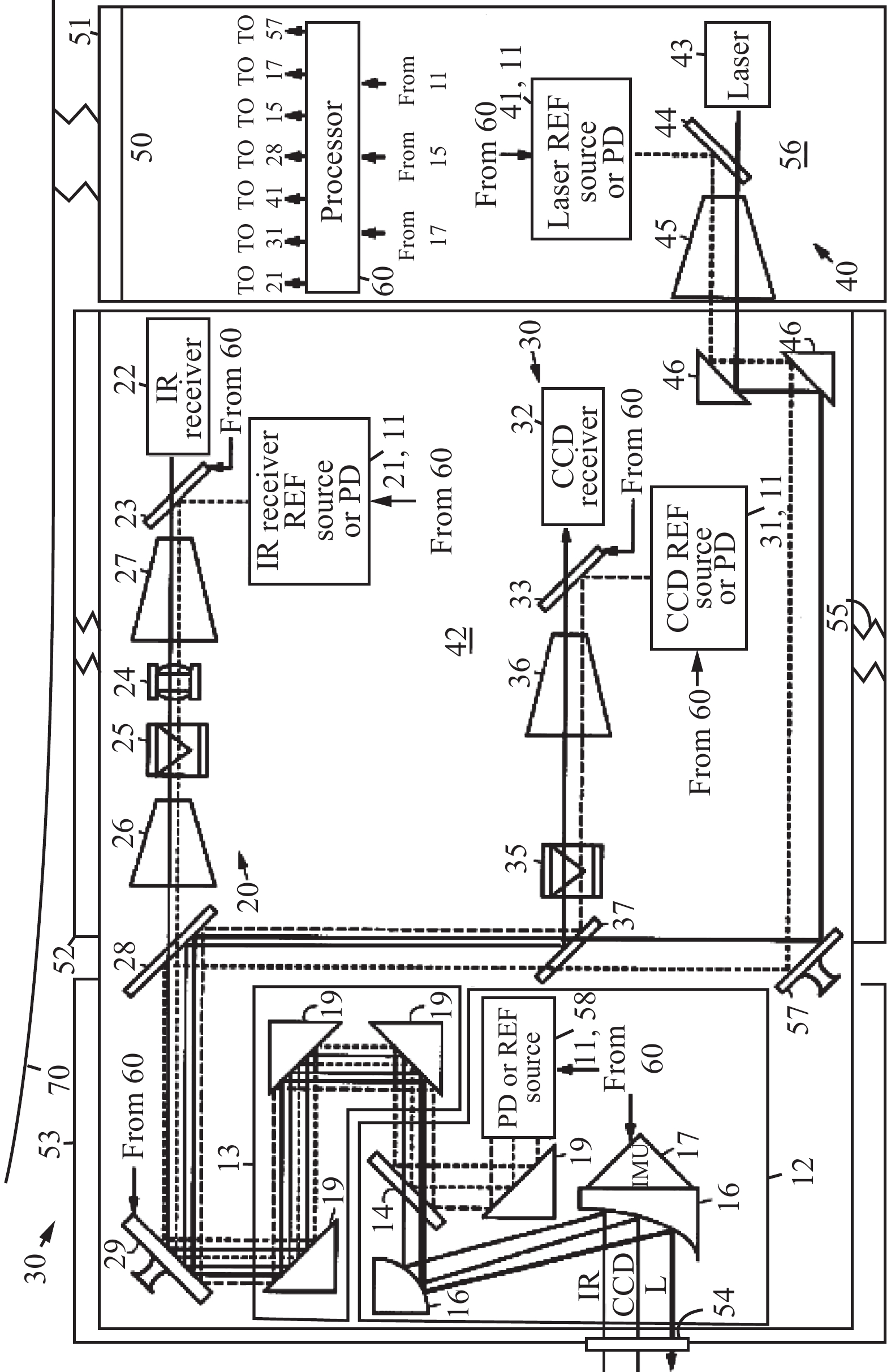
美军另一款典型的多功能光电瞄准吊舱为雷神公司的AN/ASQ-228 ATFLIR吊舱[4],探测系统采用了与Sniper XR一样的前置望远系统+光学铰链+后置成像系统和激光发射系统的共光路构架以避免各通道的光轴漂移。该吊舱采用了传统球形光电头舱+横滚舱设计,与Sniper XR吊舱的整体楔状外形相比,虽然窗口较小有利于大范围探测,但动密封难度较大。光路走向为:目标光通过有一次像的离轴三反前置望远系统,压缩光路后通过光学铰链(穿过俯仰外框耳轴)导入后置的中波红外/近红外成像通道和激光发射光路;为避免激光发射光路的后向散射,在光电头舱内还旁轴安装了一个透射式激光光斑跟踪探测系统;有0.7º/2.8º/6º/21º 4个视场,其中21º为挂架上的导航视场;最大通光孔径约150 mm,舱径为330 mm,光舱比为0.455。如图5所示。

图 5 AN/ASQ-228 ATFLIR吊舱
Figure 5. AN/ASQ-228 ATFLIR pod
ATFLIR采用的激光器[5]为1.064/1.57 μm双波段DPL激光器,其中1.064 μm激光器的最大输出功率约为500 mJ@20 Hz,正常输出功率为350 mJ@20 Hz,光束质量为7.1 mm·mrad,对典型目标可达到74 km以上的测距距离;人眼安全1.57 μm激光最大输出功率为60~90 mJ,光束质量为11.8 mm·mrad;受限于20世纪末研制年代的工业基础,激光器质量约为30 lb(1 lb=0.45 kg),体积约10.5 in×9.5 in×10.7 in(1 in3=0.0164 m3),是一个相当大的激光器。较为特殊的是,公开报道中ATFLIR吊舱激光发射通道与红外成像/电视成像通道共光路,对于具有一次像面的离轴三反前置望远系统,其中间像即为激光光束的聚焦点,需要严格控制光学舱内填充气体的组成成分。这是一个令人费解的设计,因为如此高的光束质量和能量,以及正交的方位/俯仰两个平行光路,完全可以通过在光学铰链附近平行光路分光将发射激光(此处认定为7.1 mm光束直径)导出并使用无实焦点的分孔径发射天线(7.1×8.6≈61 mm)扩束,避免Sniper XR吊舱因必须在物镜的汇聚光路中安装光学铰链导致不得不让激光共光路发射而使用繁杂的偏振分光系统和后向散射光抑制机构;基于以上认识,旁轴安装的光斑跟踪透射光学系统极有可能通过切换方式作为激光发射天线,此时激光测距的接收装置可直接在前置望远系统上安装。
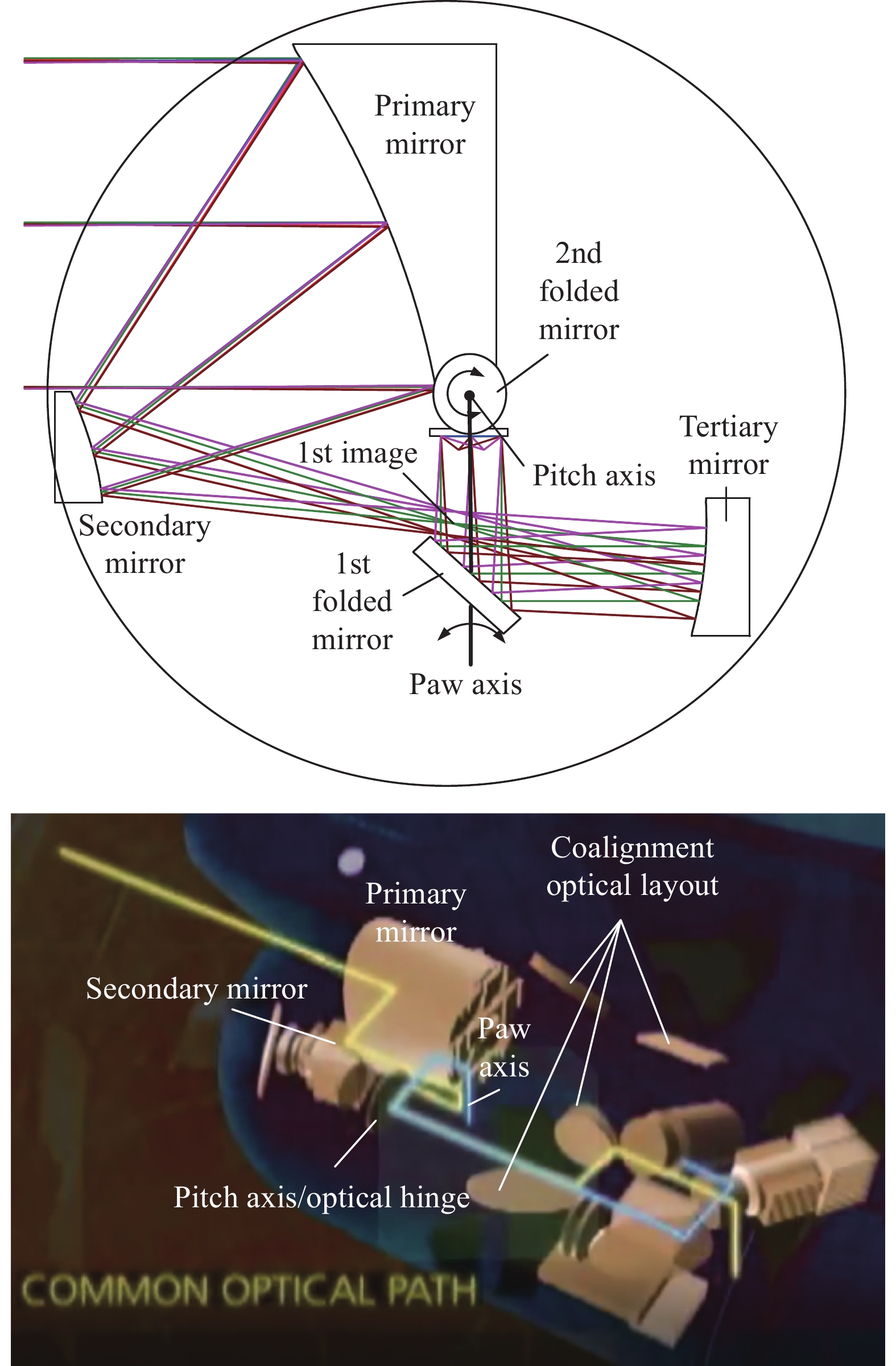
ATFLIR采用的离轴三反式前置望远系统[6]具有无色差、大视场角、质量轻等优点;离轴三反主镜背部空间可放置离轴反射式自校光路,可在使用过程中连续自校(如图6所示)[7],但也有加工、装配、检测难度大等的问题,实现难度远高于Sniper XR的透射系统,导致其售价远高于后者;这也许是ATFLIR只与波音公司F/A-18战斗机捆绑销售而不似Sniper XR广泛运用于其他军兵种和机型的一个原因(也有挂架接口等原因)。

图 6 ATFLIR吊舱的自校光路
Figure 6. Coalignment optical layout of ATFLIR pod
正向设计的ATFLIR吊舱的离轴三反式前置望远系统(见图7),天线放大倍率8.6倍(取ATFLIR吊舱的6°中视场和0.7°小视场比值,6°视场应为70 mm焦距后置成像系统的视场,出瞳口径约17.5 mm,光束走向为:目标经窗口到主镜反射到次镜并汇聚成一次像,经三镜反射成为平行光;再经45°放置的折叠反射镜1反射,反射光轴与入射光轴垂直;反射光束在主镜下端面(靠近Φ330 mm球体中心且有10 mm余量)处经45°折叠反射镜2反射,使反射光轴与折叠反射镜1反射的光轴垂直于纸面正交。此时,方位框的转轴与折叠反射镜1的光轴重合;俯仰框的转轴与折叠反射镜2反射的光轴重合。

图 7 折叠后的前置望远系统光路及ATFLIR吊舱内部结构
Figure 7. Folded front telescope system and ATFLIR pod’s inner structure
从ATFLIR的架构而言,虽然雷神公司沿用了传统球形吊舱的外形而没有采用Sniper XR的楔形拼接窗口造成其光舱比较小,但全反射的前置望远系统可方便的地增加更多的探测通道,如短波、长波红外,且无热差、色差和鬼像的影响,对所有波段都有较高的反射率,比Sniper XR更具改进潜力。
-
另一款具有广泛影响力的产品为Litening吊舱,1995年由以色列拉斐尔公司开发,后与诺斯罗普·格鲁曼公司合作进入美国市场。
Litening吊舱采用了并联布局的共光舱设计(见图8),将所有光学载荷(无论共孔径还是分孔径)和伺服控制平台置于一个球形光学舱内,包括:俯仰外框、俯仰内框(左置中波红外成像系统+INS/IMU,右置激光发射系统、电视成像系统、光斑跟踪器)和方位内框,然后统一置于横滚舱上。在球形光学舱内对各种载荷的堆砌,不可避免造成舱径过大(406 mm舱径),光舱比过小(最大光舱比不超过0.4)等问题,也无法在线自校,光轴漂移量仍然较大。这种分孔径的布局从某种意义上是直升机、无人机等低速飞行器上光电转塔式吊舱的移植品,在这些平台上可以简单粗暴地增大舱径以满足任务载荷多样化和大型化的需要,但高速固定翼飞机对气动外形要求极为严格,因此Lite-ning吊舱除了售价便宜,并不受美军作战部队欢迎。

图 8 Litening G4 吊舱光学头舱布局分布
Figure 8. Litening G4 pod’s optical cabin layout
Litening家族有Litening Ⅰ/Ⅱ/ER/AT/Ⅲ/SE/G4/5系列,其中最新的Litening 5吊舱在Litening G4基础上于2015年推出,称为下一代(四代)多功能光电瞄准吊舱,采用了透射式共孔径的中波和短波红外探测通道,1280×1024面阵探测器;高清可见光/近红外电视成像通道;双波段激光测照系统,并配有激光目标指示器。相比之前的各型号,Litening 5的中/短波红外窗口口径大幅度增加,压缩了其他通道的口径;中波红外波段的长焦视场约为1º(按Litening吊舱传统的宣传习惯1º视场应为焦平面的短边视场——电子消像旋需牺牲长边视场),则角分辨率约为17 μrad,按10 μm×10 μm像元间距计算,光学系统焦距约为590 mm,口径约150 mm,与Sniper XR相似;短波红外通道最小视场角约0.3°,角分辨率约为5 μrad(按照笔者理解,应为中波红外通道角分辨率的1/3,即5.7 μrad),具有不同于中波红外和近红外的光谱信息,且具有优良的透雾能力和较高的信噪比(铟镓砷短波红外探测器在0.9~1.7 μm波段的平均量子效率接近80%),有利于目标识别,还可确认激光照射点位置[8],为各光学通道提供校轴信息(随着光学口径越来越大,采用吊舱内校轴的难度越来越高);高清近红外/彩色相机角分辨率应与短波红外一致,即5.7 μrad,便于图像融合。彩色相机可为飞行员提供目标的色彩信息,有利于复杂背景下的目标识别和空地协同。Litening 5吊舱的最大作用距离号称可达到100 km,但只限于白天环境用短波红外对大型目标的成像探测;激光测距能力在60 km以内。Litening 5的外形如图9所示。

图 9 Litening 5吊舱
Figure 9. Litening 5 pod
-
法国最新入役的Talios吊舱基本沿用上一代Damocles吊舱的总体布局,与Litening一样为共光舱结构。该吊舱成像探测器为高清体制,三个视场:导航视场为24º×18º,中视场4.8º×3.6º,小视场1º×0.75º;中波红外成像探测通道可推两种面阵1280×1024和1024×768,小视场的角分辨率约为14 μrad (1280×1024面阵)或17 μrad (1024×768面阵)。从红外探测器的供应商Sofradir公司的产品序列中分析,更有可能是1024×768面阵的10 μm×10 μm间距F#4探测器[9]。在色彩信息对目标的跟踪识别上与Litening 5吊舱不谋而合,也采用了彩色/近红外连续变焦系统,视场范围为0.77º×0.58º~7º×5.5º,9倍变倍比,小视场的角分辨率约8 μrad。激光接收与连续变焦电视通道共孔径设计,旁轴放置激光发射天线。采用了DPL+OPO双波段激光测照系统以及用于空地协同的激光指示器。
该吊舱采用了类似“旺皮尔NG”红外搜跟系统的步进凝视扫描体制[10],即光学系统采用前置望远系统+FSM+后置成像系统体制,统一置于稳定平台内;当平台连续扫描时,前置望远系统出瞳处的FSM在探测器积分时间内按照一定倍率(前置望远系统的光学放大率)反扫补偿平台引起的视线角速度,使该积分时间内视线角速度为零,完成凝视积分后在探测器的读出时间FSM快速返回准备下一次反扫,实现了侧视相机的广域侦察功能。
Talios吊舱红外通道的最大通光口径约150 mm(1024×768面阵探测器时)或180 mm (1280×1024面阵探测器时),舱径约390 mm,光舱比约0.38或0.46。但从Talios外形分析,前者可能性更大。如图10所示。

图 10 Talios吊舱
Figure 10. Talios pod
-
从以上四型吊舱探测系统的对比分析可以看到:共光路串联布局的Sniper XR和ATFLIR吊舱具有较高的光舱比,更合理的空间布局,以及更小的迎风截面;而采用共光舱并联设计的Litening和Talios吊舱尽管尺寸更大,但留给载荷的空间有限,其实质是用框架平台包裹住所有光学载荷进行直接稳定,而无论光路如何折转,如何采用共孔径设计,都必须画地为牢地全部置于体积有限的光电头舱内,给系统升级和功能扩展带来较大障碍。
比如,需要更远的激光探测/照射距离和激光三维成像时,不可避免会造成激光器体积增大,散热要求提高。共光舱并联设计的Litening和Talios吊舱因头舱体积有限,扩展困难;而对于Sniper XR和ATFLIR吊舱的升级就较为简单。
Talios吊舱的步进凝视扫描功能需要采用前置望远系统+光学铰链上具有反扫功能的FSM+后置成像系统,对于10余年前服役的Sniper XR或ATFLIR吊舱只需简单升级其FSM即可(已在AN/AAQ-40EOTS上实现),且红外和电视成像通道可以同时扫描,便于图像融合,而前者只有红外通道的扫描拼接成像功能。
Litening 5上的中波+短波共孔径光学系统也可改进优化Sniper XR的前置望远系统光学设计(甚至光学材料都无需改变)[11],或在ATFLIR后置光路中直接增加一个短波红外成像通道。
Litening 5和Talios吊舱特有的可见光成像系统对于Sniper XR的透射式共光路光学系统而言难度较大,但可增加旁轴放置(也有足够空间)的可见光成像系统;而ATFLIR原始设计就有可见光成像探测通道。
需要探测更多波段,球形舱体布置的Litening 5和Talios吊舱除了重新设计布置、缩小其他探测通道口径外别无他法,而ATFLIR吊舱却可在现有光路上简单增加一个探测通道即可。
从这个意义上,Litening 5和Talios被称为第四代吊舱更多的原因在于其较早增加了可见光和短波红外波段以及更高的地面分辨率可为自动识别处理算法提供更多的光谱、轮廓和纹理等信息,进而大大降低了信息处理系统的虚警率,满足了人工智能的噱头,而其探测系统构架相对Sniper XR和ATFLIR吊舱并没有本质的优势,甚至有所不如。
即便构架相似,ATFLIR吊舱又比Sniper XR吊舱更有优势,至少在三个方面完胜后者:纯反射式的前置望远系统可任意增加被动探测波段;所有通道均可经过光学铰链(FSM)稳像;激光器拥有更高的光束质量和更强的输出能量,且较大的体积可方便地更换为其他体制的激光器。
当然,ATFLIR也有自己的不足,主要体现在传统球舱布局比楔形窗口静密封的狙击手XR臃肿导致光舱比不够,离轴三反前置望远系统工艺性不佳且造价昂贵,过长的光程对减振和结构刚度要求过高等。
-
第一、二代吊舱通过器件进步实现更新换代;第三、四代吊舱则通过增加功能进行代次划分。随着器件性能越来越接近物理极限,吊舱系统在探测系统硬件意义上的更新换代会越来越慢;新型吊舱可能在其服役期会历经多次器件升级和功能扩展,因此,需要有一个良好的构架以兼顾当下需求和未来发展,提高全寿命周期的性价比。
Sniper XR和ATFLIR吊舱探测系统的共光路串联式构架明显优于其他吊舱探测系统的并联式构架;而全反射式的ATFLIR前置望远系统相比纯透射式的Sniper XR前置望远系统具有更强的生命力和可持续发展能力。
以上对比分析可为类似需求的探测装置总体设计提供一个借鉴思路。
Comparison and analysis of the overall architecture of foreign EO targeting pod detection system
-
摘要: 回顾了国外军队装备的四代光电瞄准吊舱的技术特点和发展历程,定义了光学口径和吊舱舱径之比(光舱比)作为衡量集成度的标准,重点针对第三代的Sniper XR ATP和ATFLIR两型采用共光路串联布局吊舱的探测系统进行了分析和正向设计:二者均拥有Φ150 mm口径,约1.5°×1.5°视场,在0.7~0.9 μm和3.7~4.8 μm波段的传递函数接近衍射限,前者为透射式前置望远系统,后者为离轴三反式前置望远系统,二者的结构布局为:前置望远系统置于吊舱前部压缩光束,通过光学铰链和快反镜将光束导入吊舱中,部分光进入各自的探测通道或激光发射通道。其中,类ATP的透射式前置望远系统可在汇聚光路中折叠形成俯仰/方位正交轴系并置于305 mm舱径内,光舱比约0.492;类ATFLIR的离轴三反式前置望远系统可在压缩后的平行光路中折叠形成方位/俯仰两个正交轴系并置于Φ330 mm的球体内,光舱比约0.455。作为对比,采用共光舱并联布局的第四代Litening 5和Talios吊舱探测系统将所有光学载荷和伺服框架平台置于吊舱前部的Φ406 mm球体内,光舱比约0.37,其并联共光舱设计架构的集成度较低。针对未来可能的升级要求,类ATFLIR吊舱比ATP吊舱具有更强的生命力,其采用纯反射式的前置望远系统可以更方便地增加波段和拓展功能。Abstract:
Significance The technical characteristics and development process of four generations of EO (electro-optical) targeting pod are compared. The design focus and key points of each generation are summarized. Focusing on the overall design of the detection system of AN/AAQ-33 Sniper XR ATP pod and AN/ASQ-228 ATFLIR pod, as well as the newly emerging fourth generation products such as Litening 5 and Talios pods, this paper provides a reference for the development of the new generation EO targeting pod detection system. Progress Firstly, the ratio of optical aperture to pod diameter (ROP) is defined as a standard for measuring the integration level of optical machinery and servo control system. The higher the ROP is, the higher the system integration degree is. Secondly, the optical system of ATP and ATFLIR is analyzed, which are regarded as the typical 3rd generation targeting pod, both adopt the series common optical path architecture of front telescope system and servo frame platform are placed at the head of the pod. And the compressed parallel beams are introduced into the beam splitter and rear detection/laser emission system which are placed at the middle of the pod through the optical hinge and fast steering mirror (FSM). The two pods' small field of view (sFOV) is about 1.5°×1.5°, and the wavelength is 0.7-0.9 μm & 3.7-4.8 μm, and their modulation of transfer function (MTF) are close to diffraction limit. A refractive front telescope system like ATP with φ150 mm common optical path is forward designed, and the result verifies the optical system considering the servo frame platform can be installed into a pod of φ305 mm diameter, and the ROP is 0.492; A off-axis three mirror astigmatism (TMA) front telescope system like ATFLIR with φ150 mm common optical path is forward designed, and the result verifies the optical system can be installed into a pod of φ330 mm diameter, and the ROP is 0.455 (Fig.4, Fig.7). Finally, as a comparison, the optical parameters of Litening 5 and Talios (Fig.9-10) are introduced, which are regarded as the fourth generation targeting pods. The detection systems adopt a parallel common cabin layout, with all the optical payload and servo frame platform installed inside a sphere with φ406 mm diameter, and their largest optical apertures are still φ150 mm. The ROP of Litening 5 and Talios is 0.37 and 0.38, much lower than ATP and ATFLIR, indicating low integration levels. Litening 5 pod addes a shortwave infrared imaging band, which has high fog penetration ability; Talios pod addes the step-and-stare scan imaging ability; Both of them add visible light color imaging function to improve detection and recognition probability. However, based on the optical design analysis, ATP and ATFLIR can easily modify their optical systems to achieve these functions, indicating the two pods have strong vitality due to their forward-looking overall architectures, and the improvement of ATFLIR optics is much easier than that of ATP. Conclusions and Prospects In the future, the targeting pod needs to integrate functions such as air-to-air detection, laser communication, and directional infrared countermeasures (DIRCM), and must have high functional density. The series layout architecture using a pure reflection common path front telescope system, optical hinges, FSM, rear detection/laser emission system has strong scalability and expansibility. -
图 3 折叠后的前置望远系统中红外通道与Sniper XR吊舱轴系对比
Figure 3. Comparison of mid-infrared path of folded front telescope system and Sniper XR pod’s axis
图 7 折叠后的前置望远系统光路及ATFLIR吊舱内部结构
Figure 7. Folded front telescope system and ATFLIR pod’s inner structure
-
[1] Xu Xinhang, Yang Hongbo, Wang Bin, et al. Research on key technology of fast steering mirror [J]. Laser & Infrared, 2013, 43(10): 1095-1103. (in Chinese) [2] Housand B J, Tener G D, Jesse S J, et al. Combined laser/FLIR optics system: US, 6359681B1[P]. 2002-03-19. [3] Deng Jian, Qu Rui, Huang Jianbing. Several ways to realize multi-band common aperture imaging system [J]. Infrared and Laser Engineering, 2020, 49(6): 20201017. (in Chinese) doi: 10.3788/IRLA20201017 [4] Uyeno G. Raytheon advanced forward looking infrared (AT-FLIR) pod[C]//Proceedings of SPIE, 2006, 6209: 62090H. [5] Nieuwsma D E, Wang Jinxue. Design of an advanced diode-pumped solid state laser for high-altitude airborne opera-tions[C]//Proceedings of SPIE, 2005, 5659: 163-170. [6] Chen Chungte W, Anderson J S. Two-color sensor system: US, 7297951B2[P]. 2007-11-20. [7] Messina P V. Integrated system for line-of sight stabilization and auto-alignment of off-gimbal passive and active electro-optical sensors: US, 28838B1[P]. 2001-09-11. [8] Chen Hongjun, Zhou Hangyu. Recent progresses in InGaAs visible/short wavelength infrared focal plane array detectors [J]. Infrared and Laser Engineering, 2007, 36(4): 431-434. (in Chinese) [9] Reibel Y, Pere-Laperne N, Augey T, et al. Getting small, new 10 μm pixel pitch cooled infrared products [C]//Proceedings of SPIE, 2014, 9070: 907034. [10] Nouguès Pierre-Olivier, Baize Paul, Roland Flavien, et al. Third-generation naval IRST using the step-and-stare architecture [C]//Proceedings of SPIE, 2008, 6940: 69401B. [11] Wiese G E, Dumont F. Refractive multispectral objective lens system and methods of selecting optical materials therefor: US, 6950243B2[P]. 2003-11-20. -

 点击查看大图
点击查看大图

图(10)
计量
- 文章访问数: 150
- HTML全文浏览量: 29
- PDF下载量: 46
- 被引次数: 0

