
















-
遥感仪器的星上辐射定标对于保证遥感载荷输出连续可靠的科学数据产品具有重要意义[1]。常见的星上定标方法有以下三种:太阳漫反射板引用太阳光进行定标[2−5];使用人工光源进行灯光定标[6];对月球观测实现月球定标[7];利用有均匀反射率特性的场地在轨替代定标[8−10];以及和参考遥感仪器交叉定标[11]等。对于早期动态范围较窄的遥感载荷,可以通过以上三种方法实现星上辐射定标。随着遥感仪器设计技术的提升,遥感载荷的动态范围得到了极大地拓展。通过调节电子链路中的增益档位是拓展动态范围的常用方法,通常在电子链路设计时设置两个以上的增益档位,载荷成像后选择合适的增益读出:面向低辐射目标成像时选择高增益模式读出、面向高辐射目标成像时选择低增益模式读出。如S-NPP VIIRS Day Night Band中就设置了三个增益包括高增益态、中增益态和低增益态[12],动态范围可达七个数量级。对于此类大动态范围的遥感载荷,其星上定标需要对所有增益档位标定,这无疑增加了星上定标的难度。
文中研究的逐像元自适应增益成像系统与常规的多档增益成像系统不同的地方在于其在电子学链路中实现不同增益读出的方法不是通过调整运放电路的放大倍数,而是在一个像元内集成了四个不同容积的积分电容来控制切换四档增益:高增益(High Gain, HG)、中增益(Medium Gain, MG)、低增益(Low Gain, LG)、甚低增益(Ultra Low Gain , ULG)。文中的自适应增益成像系统在实验室定标过程中,由于ULG动态范围过大,实验室现有的定标光源能级有限,不能覆盖ULG的全动态范围,只能通过增益间的比例系数外推得到ULG输出特性,故增益间转换系数的测定也是实验室定标中重要的一环。在对这四个增益进行星上定标时,星载的太阳漫反射板反射的太阳能量大部分集中在ULG与LG的动态范围内,用HG与MG增益读出数据时会发生数据饱和,VIIRS Day Night Band在星上定标时也遇到了这一个问题,因此,对于高增益与中增益的标定需要通过测定相邻增益之间的增益比值来类推标定。在轨运行期间,随着时间推移遥感仪器的工作状态会发生改变,相邻增益档位之间的比例系数需要较高频次测定,以此来确保遥感载荷能输出高质量的遥感数据。
VIIRS Day Night Band测定相邻增益比值的方法有:利用太阳直射时刻以外太阳漫反射板反射的信号计算相邻增益之间比值[13]、利用晨昏交界处的地物目标同时满足高、中、低三个增益态数据不饱和的条件,计算增益之间的比值[14−15],此种方法的缺点在于局限于晨昏时的成像场景,且可以用于标定的目标辐射值范围较小。文中针对逐像元自适应成像系统的特性提出一种新的测定相邻增益比值的方法,此方法旨在为相邻两档增益提供在动态范围内的合适能级。首先以自适应增益模式获取待测通道中最多数量的增益来确定测定哪两个增益之间的比值最为合适;然后将四个增益在15个通道内同时获取的数据作为特征点对成像目标进行分类;用分类后每一类的目标均值作为一个能级进行增益比的标定。这种方法突破了晨昏时刻定标场景的局限性,且经数据验证有很大可行性,对于不限场景、高频次的增益间比例测定提供了有效参考。在轨成像时,增益间转换系数的测定可能会出现能量值过大或者过小等问题,因此,需要寻找合适的中间能量级来测定相邻增益系数。
-
文中自适应增益成像系统的简易原理如图1所示。由于四档积分电容的应用,四档增益的数据不仅可以无损读出,在这个过程中并不放大系统原有的噪声,从而确保了成像图像的高信噪比。其他多档增益成像系统使用改变运放电路放大倍数的方法在放大信号的同时也放大了噪声,使得在使用高增益时难以确保高信噪比,成像质量会有较大下降。相对而言,自适应增益成像系统在保证了高信噪比的同时,还具有大动态范围成像的能力。

图 1 自适应增益成像系统简易原理图
Figure 1. Simple schematic diagram of adaptive gain imaging system
此成像系统具有中心波长、带宽和增益档位的可编程能力,其有两种成像模式:一种是自适应增益(Adaptive Gain,AG)模式,在此模式中每个像元都可以选择在数据不饱和条件下 最大增益进行输出来提高信噪比并防止数据饱和,下传15个光谱通道的自适应增益图像;另一种成像模式是利用传输通道的可编程性对增益比例标定的特殊模式,此模式下,可以在15个传输信道中编程,可以同时下传选定的三个通道的四个增益数据以及自适应增益数据,在此过程中不产生时延和数据破坏。在自适应增益成像模式下,首先选择需要下传的通道波长,并将该通道在光谱谱段范围内的起止行数与下传增益依次编码,产生通道编程表的方法如图2所示。在特殊的定标模式下对15个传输信道的编程方法如图3所示。此时的15个传输信道被分成三个部分,每个部分有五个信道来传输选定的某一光谱通道的HG、MG、LG、ULG与AG数据,共可传输三个光谱通道的数据。由于自适应增益成像系统具有通道可编程的能力,可以选择输出光谱通道的波长范围以及使用何种增益输出,为采用文中方法同时获取同一地物目标的四档增益及自适应增益图像提供了可能。

图 2 自适应增益成像模式通道编程表编码过程图
Figure 2. Encoding process diagram of channel programming table for adaptive gain imaging mode

图 3 定标模式通道编程表编码过程图
Figure 3. Coding process diagram of calibration mode channel programming table
-
文中研究的逐像元自适应增益成像系统搭载于太阳同步卫星之上,并配有星上太阳定标器与星上灯源。在北极上空,星上辐射定标利用漫反射板反射的太阳光作为入瞳完成;同时引入太阳光与漫反射板反射光进入比辐射计,作为漫反射板双向反射分布函数的动态监测。星上辐射定标是根据已知的辐射输入,建立辐射输入与遥感器响应输出的关系。由于星上灯源主要用于光谱定标,且太阳定标器主要在ULG的动态范围内,故星上辐射定标首先根据ULG档位建立辐射输入与载荷输出码值的关系,得到ULG的辐射定标系数如公式(1)所示:
$$ E={K}_{{\mathrm{ULG}}}\times {DN}_{{\mathrm{ULG}}}+{b}_{{\mathrm{ULG}}} $$ (1) 式中: $ {K}_{{\mathrm{ULG}}} $为ULG的辐射定标系数 ; $ {b}_{{\mathrm{ULG}}} $为ULG的辐射定标偏置值; $ {DN}_{{\mathrm{ULG}}} $为ULG输出的图像DN(Digital Number)值。
如第一章中提到,逐像元自适应增益系统具有中心波长、带宽及输出增益的编程能力,在轨通过定标模式可获取某一波段的四档增益对相同地物目标同时成像数据。由于同一目标的辐亮度E是一定的,不同增益输出的辐射定标系数和偏置之间的关系如公式(2)所示。由公式(2)可以推导出相邻增益档位间的比例系数如公式(3)所示。 在星上定标时,可以通过星上定标器首先对ULG进行辐射定标,然后依据相邻增益的转换系数以及公式(3)得到其余增益的辐射定标系数。
$$ \left\{\begin{array}{l}{K}_{{\mathrm{ULG}}}\times {DN}_{{\mathrm{ULG}}}+{b}_{{\mathrm{ULG}}}={K}_{{\mathrm{LG}}}\times {DN}_{{\mathrm{LG}}}+{b}_{{\mathrm{LG}}}\\ {K}_{{\mathrm{LG}}}\times {DN}_{{\mathrm{LG}}}+{b}_{{\mathrm{LG}}}={K}_{{\mathrm{MG}}}\times {DN}_{{\mathrm{MG}}}+{b}_{{\mathrm{MG}}}\\ {K}_{{\mathrm{MG}}}\times {DN}_{{\mathrm{MG}}}+{b}_{{\mathrm{MG}}}={K}_{{\mathrm{HG}}}\times {DN}_{{\mathrm{HG}}}+{b}_{{\mathrm{HG}}}\end{array}\right. $$ (2) 式中: $ {K}_{{\mathrm{ULG}}} $、 $ {K}_{{\mathrm{LG}}} $、 $ {K}_{{\mathrm{MG}}} $、 $ {K}_{{\mathrm{HG}}} $分别为ULG、LG、MG与HG的辐射定标系数; $ {b}_{{\mathrm{ULG}}} $、 $ {b}_{{\mathrm{LG}}} $、 $ {b}_{{\mathrm{MG}}} $和 $ {b}_{{\mathrm{HG}}} $分别为四档增益的辐射定标偏置。
$$ \left\{\begin{array}{c}{P}_{{\mathrm{HM}}}={K}_{{\mathrm{HG}}}/{K}_{{\mathrm{MG}}}\\ {P}_{ML}={K}_{{\mathrm{MG}}}/{K}_{{\mathrm{LG}}}\\ {P}_{{\mathrm{LU}}}={K}_{{\mathrm{LG}}}/{K}_{{\mathrm{ULG}}}\end{array}\right. $$ (3) 式中: $ {P}_{{\mathrm{HM}}} $、 $ {P}_{ML} $、 $ {P}_{{\mathrm{LU}}} $分别为HG和MG、MG和LG、LG和ULG相邻两增益档位之间的比例系数。在得到这三个比例系数后,可依据ULG的辐射定标系数 $ {K}_{{\mathrm{ULG}}} $计算得到剩下三档增益的辐射定标系数,如公式(4)所示:
$$ \left\{\begin{array}{l}{K}_{{\mathrm{LG}}}={P}_{{\mathrm{LU}}}\times {K}_{{\mathrm{ULG}}}\\ {K}_{{\mathrm{MG}}}={P}_{{\mathrm{LU}}}\times {P}_{ML}\times {K}_{{\mathrm{ULG}}}\\ {K}_{{\mathrm{MG}}}={P}_{{\mathrm{LU}}}\times {P}_{ML}\times {P}_{{\mathrm{HM}}}\times {K}_{{\mathrm{ULG}}}\end{array}\right. $$ (4) 文中提出的逐像元自适应增益成像系统的星上辐射定标测定方案主要是通过测定增益比例系数来实现的,具体过程利用探测器接收到的入瞳辐亮度为相邻的两档增益提供适当的能级,以便计算它们之间的转换比例系数。在定标过程中不计较成像目标究竟是什么类型,即把地面、云层等均看作能量能级,故不需要进行大气校正及云层去除,也不受天气影响,在晴天和阴天都可进行该方案来进行相邻增益比例系数测定。具体的方案为:通过不同通道的自适应增益成像结果确定当前适合测定的两档增益比例系数;接着利用经过条带噪声去除的四档增益输出作为单个像素的成像特征来对成像图像进行聚类;将聚类后相邻两档增益的不同类别的图像区域作为能量点对相邻增益进行线性关系拟合,可得当前通道的相邻增益比例系数;利用测定的增益比例系数计算各增益星上辐射定标系数。方案流程图如图4所示。

图 4 星上增益间比例系数方案流程图
Figure 4. Flow Chart for calculating the onboard gain radio coefficient
-
目前文中研究的逐像元自适应增益成像系统还未发射,只能采用地面成像实验模拟在轨运行成像。外场成像实验是在晴天时进行的,目的是在晴天时可以在一次成像实验中获取较多增益档位的数据(MG、LG、ULG与少量HG)。如果在阴天成像时,只能获得HG与MG档位的数据以及少量的LG数据,由于外场成像实验需要构建实验环境,需要较多人员参与,在实际安排中就只选择了晴天时进行成像。在外场成像实验时,设置逐像元自适应增益成像系统为第一章中提到的定标成像模式,每三个光谱通道下传一次,共下传五次,使其下传缺省的15个通道的四个增益的单独成像以及自适应增益成像。由于分不同批次下传,该15个通道并不是严格意义上的同时下传,但外景成像时每次均对同样的目标成像,故不需要进行图像匹配。将来在轨运行阶段,可以根据数据下传所需时间与卫星飞行速度计算图像差异,并对下传的15个通道进行图像匹配,此过程较为简单。图5为第13通道的四个增益单独下传及自适应增益下传的成像结果,其中,标注为“AUTO”的第五幅图为自适应增益成像结果。可以看到在晴朗天气下HG与MG图像出现不同程度饱和;ULG图像在信号微弱处图像DN过低,信噪比下降;自适应增益通过调节增益,使得强信号DN减少不饱和而弱信号DN增加信噪比提高,全部细节信息都不会丢失。

图 5 外场成像四档增益与自适应增益成像效果图
Figure 5. Image of four gains and adaptive gains in exterior imaging
-
遥感仪器中不同传感器阵列间的响应差异如果不校正的话,就会在遥感影像中产生条带噪声,这不仅降低了图像的视觉质量,也会进一步影响后续图像处理[16−17]。文中主要研究星上定标时刻增益比例的计算,因此,获取到外场成像数据后,需要去除四个增益图像的条带噪声。自适应增益图像的条带噪声对后续分类操作及相邻增益比例系数的测定没有影响,故文中暂且不讨论自适应增益图像条带噪声的去除问题。
文中选用了均值滤波、高斯滤波、形态学操作去噪、非局部均值去噪等方法来进行条纹噪声的去除。图6分别是这四种方法校正后的图像,可以看到:通过非局部均值去噪以及形态学去噪的方法去除条纹是效果较好的,但是,通过形态学去噪后会出现图像失真的现象,故在文中选择非局部均值去噪的方法来进行条带噪声的去除。

图 6 条带噪声去除效果图
Figure 6. Strip noise removal effect diagram
-
上一节中对 15个通道的四个增益单独下传的图像进行了条带噪声的去除。对于去除条带噪声后的这些图像的单个像素来说,可以认为15个通道分别下传的四个增益输出共计60个数据都是该像素的特征输出。利用这60个特征数据对输出图像进行K-Means分类,将分类得到的类别掩膜作为2.4节中用来计算相邻增益不同类别均值的参考依据,并进一步将不同类别的均值作为相邻增益比例关系系数计算的能级点。
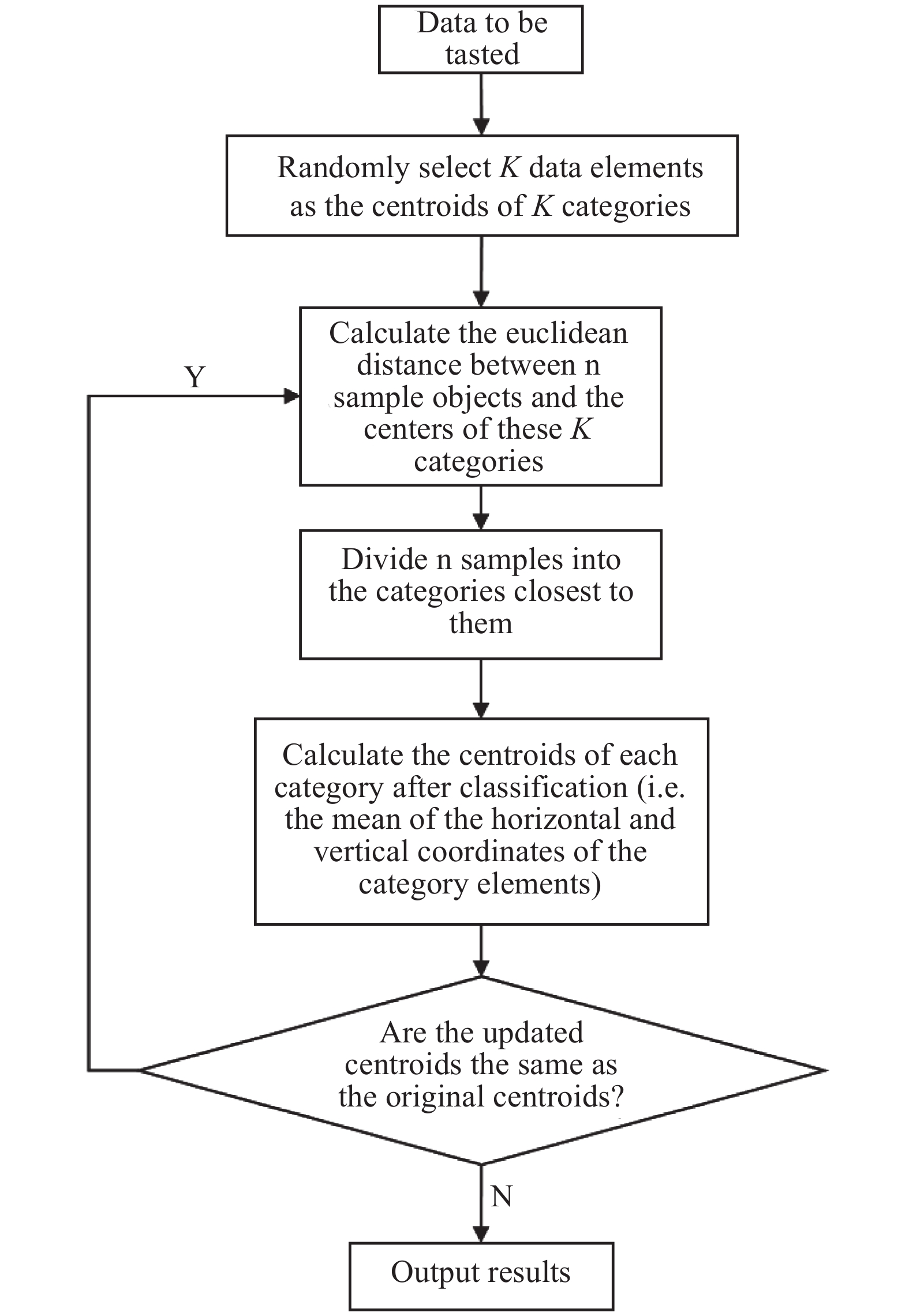
由于对图像分类时缺乏丰富的地物标签,故只能选择无监督的聚类方法。聚类将数据划分为不同的组,旨在最大化类内相似性,同时最大化类间相异性, 在大数据分类中非常有用[18]。K-Means是最简单的无监督聚类方法之一。它设定了分类的类别数K,将n个样本对象分为K个类别。在每一个类别中都预先随机定义了一个质心,通过计算各个样本对象到质心的距离来对样本进行划分,一次划分结束后会重新计算质心,并进行下一次的划分,直到质心在迭代时不会产生移动为止[18−19],K-Means的算法流程图如图7所示。

图 7 K-Means算法流程图
Figure 7. K-Means algorithm flowchart
-
在进行相邻增益的关系系数计算前,首先应当确定当前的光谱通道两个增益档位出现次数最多。对2.1节中获取到的15个通道的自适应增益图像进行增益出现次数统计,得到每个通道在自适应增益成像模式下出现次数最多和第二多的增益,这意味着在该通道内适合对出现次数最多的这两个增益进行比例计算。其余增益档位由于出现次数较少,很难找到合适的能级进行定标,故在此不做讨论。图8为第13通道出现次数最多的两个增益,其中,第三幅图中不同颜色表示自适应增益成像模式下各个像元选择的不同增益,红色为MG,蓝色为LG,绿色为ULG;前两幅图中白色区域表示出现次数最多和第二多的增益区域。

图 8 通道13出现次数最多和第二多的增益分布图与自适应增益分布图
Figure 8. Gains with the highest and second most occurrences and adaptive gain distribution of channel 13
-
由上一节的增益档位出现次数统计,可以得到各个光谱通道出现次数最多的两个增益,说明当前的环境中成像目标的能量集中在这两个档位的动态范围内。加上2.2节中得到的K-Means分类结果掩膜,即可对每个通道内出现次数最多的两个增益单增益下传的图像进行分类,并计算两幅图中不同类别的像素均值,作为下一步线性拟合的能级点。在获取了相邻增益的均值点后,首先根据线性相关性剔除超过仪器线性范围的数据以及极少数特异均值点。最小二乘法是在数据处理及数据拟合过程中广泛使用的数学工具。在仪器设计时,每个增益档位的响应值都是有很高的线性度的,故相邻增益档位的输出值理论上也具有很高的线性度。文中采用最小二乘法对剩余有效数据进行线性拟合,假设两增益档位输出DN值的关系如公式(5)所示:
$$ {DN}_{High}=P\times {DN}_{Low}+C $$ (5) 式中: $ {DN}_{High} $、 ${DN}_{Low\text{}}$分别为相邻两增益中较高增益与较低增益输出DN值; $ P $为相邻增益比例系数; $ C $为相邻增益转换偏置。将公式(5)转换成矩阵形式,如公式(6)所示:
$$ {\hat{X}}_{High}={X}_{Low} \theta $$ (6) 式中: $ {X}_{High} $、 $ {X}_{Low} $分别为相邻两增益中较高增益与较低增益的不同类别平均输出DN值组成的数据矩阵; $ \theta =\left[\begin{array}{c}\hat{P}\\ \hat{C}\end{array}\right] $。此外,定义误差为高增益与低增益计算反演得到的值之间的差值,如公式(7)所示:
$$\hat{\epsilon}_i={x}_{High,i}-{\hat{x}}_{High,i\text{}} $$ (7) 式中: $ \hat{\epsilon}_i $为第i个类别高增益均值 $ {x}_{High,i\text{}} $与低增益反演得到的值 $ {\hat{x}}_{High,i\text{}} $之间的差值。低增益图像像元DN值依据估算的邻增益比例系数和相邻增益转换偏置反演推算得到的高增益图像像元DN值如公式(8):
$$ {\hat{x}}_{High,i\text{}}={\hat{P}}_{}\times {x}_{Low,i\text{}}+{\hat{C}}_{} $$ (8) 式中: $ \hat{P} $为相邻增益的比例系数估计值; $ \hat{C} $为增益转换偏置估计值。最小二乘法目标是使误差值的和达到最小,即得到 $ \min\sum \hat{\epsilon}_i $,整理为误差目标函数,如公式(9)所示:
$$\begin{split} & J=\frac{1}{2}\sum _{i=1}^{K}\hat{\epsilon}_i^{2}=\frac{1}{2}\sum _{i=1}^{K} {\left({\hat{x}}_{High,i\text{}}-{x}_{High,i\text{}}\right)}^{2}=\\& \frac{1}{2}({\hat{X}}_{High}-{X}_{High\text{}}{)}^{{\mathrm{T}}}({\hat{X}}_{High}-{X}_{High\text{}}) \end{split}$$ (9) 公式(9)转化成矩阵的形式,如公式(10)所示:
$$ J=\frac{1}{2}({X}_{Low}\theta -{X}_{High}{)}^{{\mathrm{T}}}({X}_{Low}\theta -{X}_{High}) $$ (10) 将公式(9)对 $ \theta $求导,并将求导公式等于零,此时,达到误差函数的极小值点,得到公式(11):
$$ \frac{\partial }{\partial \theta }J={{X}_{Low}}^{{\mathrm{T}}}({X}_{Low}\theta -{X}_{High})=0 $$ (11) 求解即可得到相邻增益的比例系数估计值 $ \hat{P} $和增益转换偏置估计值 $ \hat{C} $:
$$ \theta =\left[\begin{array}{c}\hat{P}\\ \hat{C}\end{array}\right]={\left({{{X}_{Low}}^{{\mathrm{T}}}X}_{Low}\right)}^{-1}{{X}_{Low}}^{{\mathrm{T}}}{X}_{High} $$ (12) -
此节主要针对第2节中提出的星上辐射定标过程中相邻增益档位比例系数测定方案,给出相应的过程结果,并给出最后测定的相邻增益的比例系数。由于文中研究的逐像元自适应增益成像系统还未发射,其还未与星上定标器进行结构固定,故无法依据星上定标器对ULG档位进行辐射定标,更不能依靠ULG的辐射定标系数来推算其他档位的辐射定标系数,不能计算外场成像目标的辐亮度。在文中用相邻增益档位的比例关系系数,由两个增益档位中较低增益档位的图像数据反推较高增益档位的图像输出,通过比较反演高增益图像数据与实际高增益图像输出来验证比例系数的测定结果。如3.4节所示,可以看到:反演得到的高增益图像与实际的高增益图像有极大的数据相关性和结构相关性,同时归一化均方误差值大部分小于0.01。由此可知,在星上辐射定标时,由该方法测定的相邻增益比例关系系数有很高的准确度,用来由较低增益反演高增益输出是可行性的。
-
在2.2节进行K-Means分类时,聚类的类别数(即K值)的选取会对分类的精度产生影响。如果K值过大,可能分类结果过于复杂,出现很多只有几个像素点的微小数据簇,产生过拟合;如果K值过小,则分类会过于简单,可能产生不同的成像目标被分进一个类别中,在计算均值后可能会产生较大误差,产生欠拟合。故文中采用手肘法(Elbow Method)来寻找合适的K值,其具体操作是:首先选择一个K值的大概区间;计算不同K值下的聚类结果的误差平方和(SSE);绘制K值和对应的SSE之间的关系图;观察K值与SSE的关系图,其中,SSE下降速率明显变缓的位置就是最合适的K值(即肘部拐点)。如图9所示,文中选择了 K值大概的区间为15~40,并经过手肘法得到最佳K值为31。外场成像实验K-Means分类结果如图10所示。

图 9 手肘法搜索K-Means分类中的K值
Figure 9. Schematic diagram of elbow method to search for K value in K-Means classification

图 10 K-Means分类结果示意图
Figure 10. Schematic diagram of K-Means classification results
-
统计每一个光谱通道的自适应增益图像中各个增益档位出现的次数,可以得到各光谱通道出现次数最多的两个增益,如表1所示。
表 1 各光谱通道出现次数最多的两个增益档位
Table 1. Two gains with highest number of occurrences in each spectral channel
Channels Gain with the most occurrences Gain with the second most occurrences Channels Gain with the most occurrences Gain with the second most occurrences Ch1 MG HG Ch9 ULG LG Ch2 LG MG Ch10 LG MG Ch3 LG MG Ch11 LG MG Ch4 LG MG Ch12 LG MG Ch5 LG MG Ch13 ULG LG Ch6 LG MG Ch14 LG MG Ch7 LG ULG Ch15 LG MG Ch8 ULG LG 通过上一节得到的K-Means分类结果掩膜,对每一个光谱通道的出现次数最多的两档增益的单增益输出图像进行分类,可以得到两个增益图像不同类别产生的均值点,这些均值点将作为下一节中线性拟合的数据点。图11是几个光谱通道中两个增益档位分类求均值得到的原始数据点,可以看到较低增益档位与较高增益档位数据点之间有很强的线性相关性。
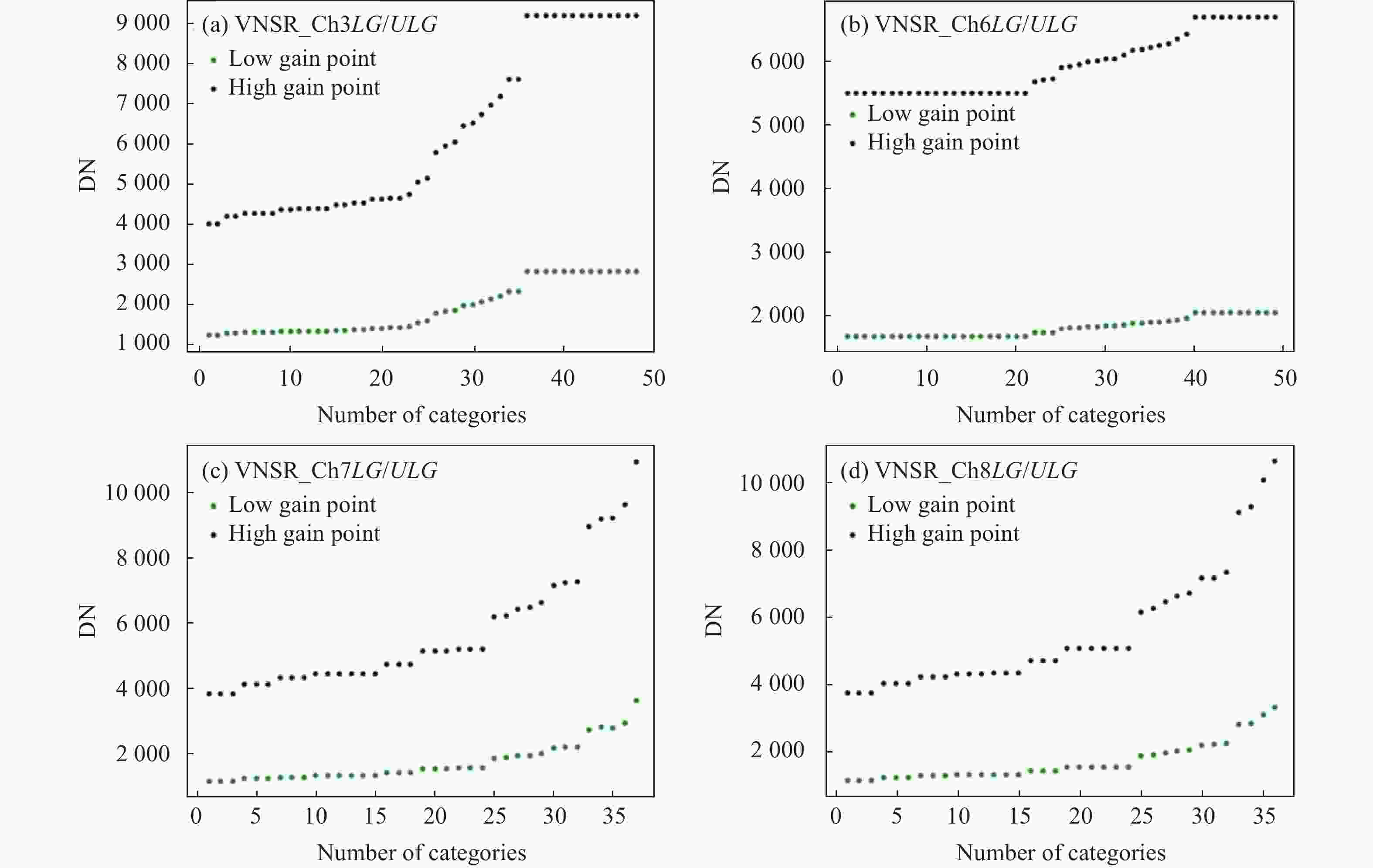
图 11 通道3、6、7、8中两个增益档位分类求均值得到的原始数据点
Figure 11. Raw data points obtained by classifying and averaging two gain levels in several spectral channels
-
此节展示了相邻增益档位不同类别最小二乘法线性拟合结果,并与实验室的相邻增益档位比例系数测定结果进行了比较。在实验室测定得到的HG与MG的比例系数均值为4.823,MG与LG的比例系数为均值4.643,LG与ULG的比例系数均值为3.254。虽然不同光谱通道的比例系数略有不同,但与均值相差不大。因外场成像实验在中午12点左右进行,观测目标反射率较强,仅有能量较低的光谱通道1(375~395 nm)中有些许HG增益分布,不足以支持测定HG与MG的关系系数;在剩余通道中仅1、2、3、14、15通道中有一些MG增益分布,但由于MG主要集中分布在密集建筑物中,且能量集中在MG动态范围的前50%,故测定结果与实验室测定有些许出入(见表2),但除去通道1外,误差均小于等于5%,外场成像MG/LG关系拟合结果见图12,图中横纵坐标均为DN值。LG与ULG的比例系数在大部分通道内均可测定,故选取几个通道的测定结果展示见图13,图中横纵坐标均为DN值,测定值与误差如表3所示。可以看到LG与ULG的比例系数的测定结果良好,在多个通道内误差值不超过3%。
表 2 外场成像MG/LG相邻增益比例系数
Table 2. MG/LG adjacent gain ratio coefficient of exterior imaging
Channels Field experiment
proportion coefficientsLab experiment
proportion coefficientsMeasurement error of field experiment coefficients Ch1 4.214 4.559 7.57% Ch2 4.253 4.549 5.143% Ch3 4.241 4.423 3.843% Ch14 4.451 4.681 4.913% Ch15 4.524 4.451 1.640% 
图 12 通道2、3、14、15中MG与LG比例系数测定结果
Figure 12. Measurement results of the ratio coefficient between MG and LG for channels 1, 2, 3, 14, and 15

图 13 通道2、3、4、5中LG与ULG比例系数测定结果
Figure 13. Measurement results of the ratio coefficient between LG and ULG for channels 2, 3, 4, and 5
表 3 外场成像LG/ULG相邻增益比例系数
Table 3. LG/ULG adjacent gain ratio coefficient of exterior imaging
Channels Field experiment proportion coefficients Lab experiment proportion coefficients Measurement error of field experiment coefficients Ch2 3.264 3.251 0.399% Ch3 3.258 3.273 0.458% Ch4 3.268 3.264 0.123% Ch5 3.179 3.260 2.485% Ch12 3.196 3.263 2.053% Ch13 3.248 3.278 0.915% Ch14 3.252 3.258 0.184% Ch15 3.270 3.259 0.338% -
得到外场成像时的比例系数和偏置后,可以根据公式(8)由低增益输出DN值计算高增益的反演DN值,通过与高增益实际的输出DN值进行比较,即可对该方法测定的相邻增益的比例系数准确性进行评价,如图14是通道2出现次数最多的增益LG反演到高一级增益MG的反演图像与MG增益实际成像的对比图。文中选取归一化均方误差NMSE、结构相似性指数SSIM[20]、图像相关系数R比较反演得到的高增益图像与实际高增益输出图像两幅图之间的差异。其中,NMSE越小两幅图像越相近;SSIM范围在0~1之间,值越接近1,两幅图结构越相同;ROCC范围在0~1之间,值越接近1,两幅图相关性越大。列举几个通道的实验结果如表4,可以看到NMSE均小于0.1,且SSIM均大于0.85,R均大于0.95。
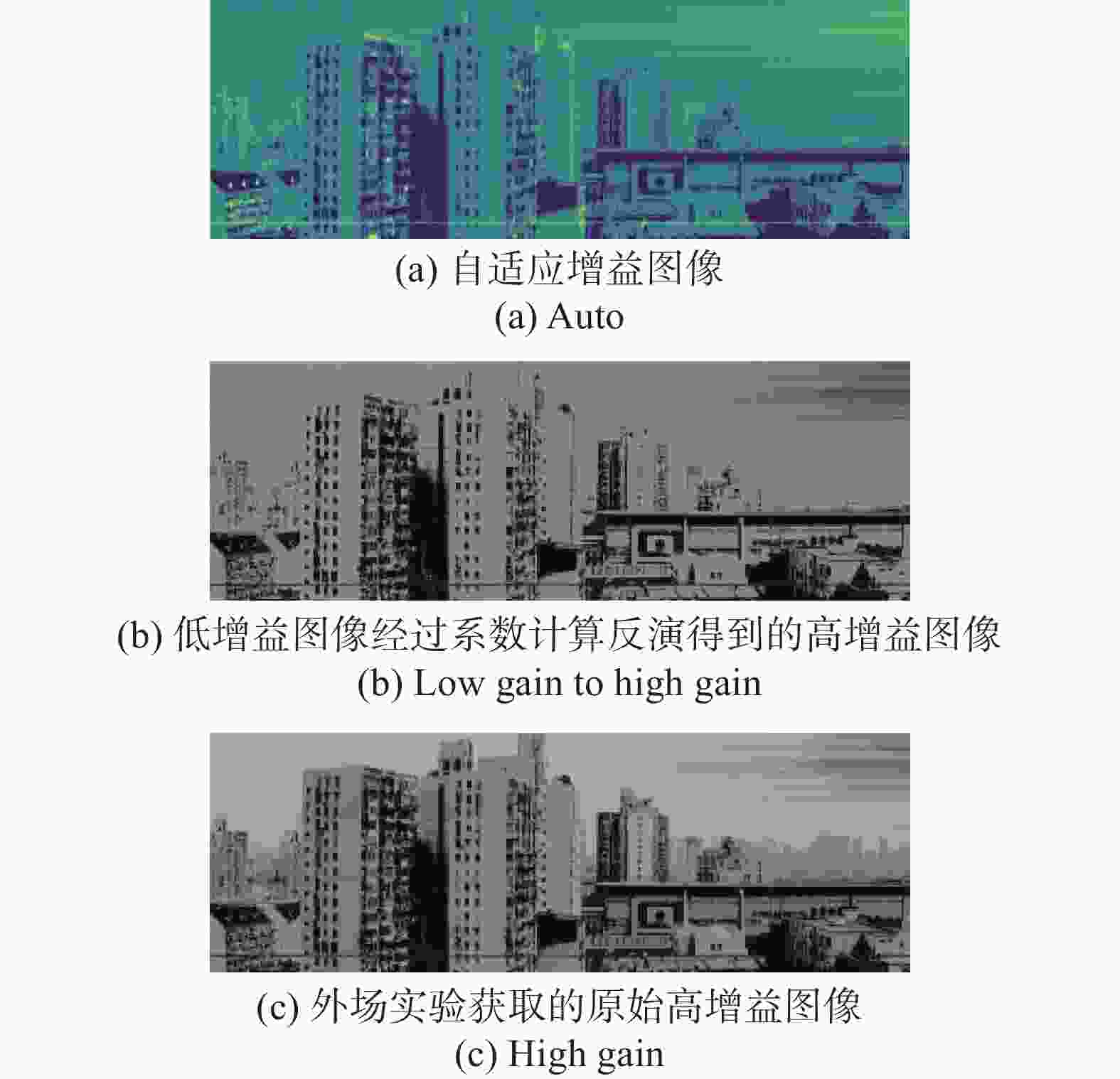
图 14 通道2外场成像低增益反演与高增益输出对比图
Figure 14. Comparison of low gain inversion and high gain output for channel 2 external imaging
表 4 外场成像反演图像质量
Table 4. Inversion of image quality in outfield imaging
Channels and corresponding gains NMSE SSIM R Ch2 MG/LG 0.0342 0.912 0.983 Ch3 MG/LG 0.0901 0.893 0.955 Ch4 LG/ULG 0.0765 0.878 0.962 Ch4 MG/LG 0.0399 0.989 0.980 Ch5 LG/ULG 0.0695 0.879 0.965 Ch5 MG/LG 0.0520 0.917 0.974 Ch6 LG/ULG 0.0287 0.874 0.986 Ch6 MG/LG 0.0713 0.895 0.964 Ch7 LG/ULG 0.0853 0.949 0.957 Ch8 LG/ULG 0.0833 0.965 0.958 -
当前逐像元自适应增益成像系统可以在保证高信噪比的前提下提高仪器的动态范围,满足多场景成像的遥感需求。但是,此成像系统的辐射定标却因宽动态而产生较大困难:一是在实验室辐射定标过程中由于积分球输出能级有限而ULG动态范围过大造成ULG不能全动态范围定标;二是星上辐射定标由于太阳定标器的输出能量值过高,基本都落在ULG与LG的动态范围内,而MG与HG难以进行辐射定标。因此,想要对四档增益的全动态范围进行辐射定标,必须要测定相邻增益之间的比例系数,得到相邻增益之间的能量转换关系。
论文针对于这一成像系统在轨星上定标时相邻增益间比例测定场景受限这一问题,提出了一种利用多档增益输出数据作为特征对遥感图像聚类,从而实现相邻增益间的关系拟合,得到比例系数的方法,由上一节实验数据验证有极大的星上应用可行性。在进行外场实验时,有以下几点可能对文中讨论的星上定标方案产生影响,故在此做出简单讨论:
1) 地面成像实验的成像目标为城市高楼,这使得仪器视场内的目标种类过于复杂,对于遥感图像的聚类产生了较大影响。当逐像元自适应成像系统在轨运行之后,视场内出现如此高度密集的目标的可能性很低,此问题可以得到解决。
2)遥感载荷成像时产生的条纹噪声也会对图像聚类结果产生影响,因此,文中方法对于图像的质量有较高要求。
3)外场成像实验与实验室实验时的外界环境不同,测定的相邻增益间的比例系数可能有略微的变化。
在上述三个因素的影响下,文中讨论的方法与实验室测定的相邻增益间比例系数在MG/LG与LG/ULG有较好的一致性:除第一通道外,MG/LG测定误差不超过5%;LG/ULG测定误差不超过3%。使用外场成像实验验证时,该方案测定的比例系数被用于相邻两增益间低增益图像反演高增益输出,并将反演结果与实际高增益输出图像进行对比,结果大部分通道的归一化均方误差均小于0.01,且两图像结构相关性与数据相关性均达到了较高水平。故认为文中讨论的星上辐射定标方案有很大的可行性,可以在文中讨论的遥感载荷发射后进行验证,为以后带有逐像元自适应增益成像系统的遥感载荷的星上辐射定标提供了思路。
Research on onboard radiation calibration scheme based on pixe-level adaptive gain imaging system
-
摘要:
逐像元自适应增益成像系统通过在每个像元的电子链路中集成四档不同容积的积分电容,可以在确保高信噪比的前提下实现大动态范围的遥感成像需求。此成像系统在发射前测试时,由于甚低增益(ULG)的动态范围过大而实验室积分球能量有限,只能通过与低增益(LG)的比例系数递推来间接对ULG后半量程的输出特性标定;星载太阳定标器反射能量过大会导致高增益(HG)和中增益(MG)输出饱和也无法直接测定辐射定标系数,只可通过比例系数推定。提出一种星上增益比例系数测定的方案,分别利用四档增益的输出作为特征对实验图像分类,将不同成像目标的输出码值作为多个定标能级,利用最小二乘法线性拟合相邻增益输出后得到相邻增益的比例系数。此方案验证了实验室增益比例系数测定结果,同时在外场成像实验中用该方法计算得到的比例系数用于相邻两档增益中较低增益图像反演较高增益图像,结果与实际较高增益图像对比归一化均方误差大部分小于0.01、两图像结构相关系数基本在90%左右、数据相关系数达到90%。证明该方法测定的相邻两增益比例相关系数有较高准确性,在星上辐射定标时用于高增益辐射定标系数的递推求取有极大的可行性,解决了星上不能直接对HG、MG辐射定标的问题。
-
关键词:
- 星上辐射定标 /
- 增益比例系数测定 /
- 逐像元自适应增益成像系统 /
- 大动态范围
-
图 2 自适应增益成像模式通道编程表编码过程图
Figure 2. Encoding process diagram of channel programming table for adaptive gain imaging mode
图 3 定标模式通道编程表编码过程图
Figure 3. Coding process diagram of calibration mode channel programming table
图 4 星上增益间比例系数方案流程图
Figure 4. Flow Chart for calculating the onboard gain radio coefficient
图 5 外场成像四档增益与自适应增益成像效果图
Figure 5. Image of four gains and adaptive gains in exterior imaging
图 8 通道13出现次数最多和第二多的增益分布图与自适应增益分布图
Figure 8. Gains with the highest and second most occurrences and adaptive gain distribution of channel 13
图 9 手肘法搜索K-Means分类中的K值
Figure 9. Schematic diagram of elbow method to search for K value in K-Means classification
图 11 通道3、6、7、8中两个增益档位分类求均值得到的原始数据点
Figure 11. Raw data points obtained by classifying and averaging two gain levels in several spectral channels
图 12 通道2、3、14、15中MG与LG比例系数测定结果
Figure 12. Measurement results of the ratio coefficient between MG and LG for channels 1, 2, 3, 14, and 15
图 13 通道2、3、4、5中LG与ULG比例系数测定结果
Figure 13. Measurement results of the ratio coefficient between LG and ULG for channels 2, 3, 4, and 5
图 14 通道2外场成像低增益反演与高增益输出对比图
Figure 14. Comparison of low gain inversion and high gain output for channel 2 external imaging
表 1 各光谱通道出现次数最多的两个增益档位
Table 1. Two gains with highest number of occurrences in each spectral channel
Channels Gain with the most occurrences Gain with the second most occurrences Channels Gain with the most occurrences Gain with the second most occurrences Ch1 MG HG Ch9 ULG LG Ch2 LG MG Ch10 LG MG Ch3 LG MG Ch11 LG MG Ch4 LG MG Ch12 LG MG Ch5 LG MG Ch13 ULG LG Ch6 LG MG Ch14 LG MG Ch7 LG ULG Ch15 LG MG Ch8 ULG LG  下载: 导出CSV
下载: 导出CSV
表 2 外场成像MG/LG相邻增益比例系数
Table 2. MG/LG adjacent gain ratio coefficient of exterior imaging
Channels Field experiment
proportion coefficientsLab experiment
proportion coefficientsMeasurement error of field experiment coefficients Ch1 4.214 4.559 7.57% Ch2 4.253 4.549 5.143% Ch3 4.241 4.423 3.843% Ch14 4.451 4.681 4.913% Ch15 4.524 4.451 1.640%
下载: 导出CSV
表 3 外场成像LG/ULG相邻增益比例系数
Table 3. LG/ULG adjacent gain ratio coefficient of exterior imaging
Channels Field experiment proportion coefficients Lab experiment proportion coefficients Measurement error of field experiment coefficients Ch2 3.264 3.251 0.399% Ch3 3.258 3.273 0.458% Ch4 3.268 3.264 0.123% Ch5 3.179 3.260 2.485% Ch12 3.196 3.263 2.053% Ch13 3.248 3.278 0.915% Ch14 3.252 3.258 0.184% Ch15 3.270 3.259 0.338%
下载: 导出CSV
表 4 外场成像反演图像质量
Table 4. Inversion of image quality in outfield imaging
Channels and corresponding gains NMSE SSIM R Ch2 MG/LG 0.0342 0.912 0.983 Ch3 MG/LG 0.0901 0.893 0.955 Ch4 LG/ULG 0.0765 0.878 0.962 Ch4 MG/LG 0.0399 0.989 0.980 Ch5 LG/ULG 0.0695 0.879 0.965 Ch5 MG/LG 0.0520 0.917 0.974 Ch6 LG/ULG 0.0287 0.874 0.986 Ch6 MG/LG 0.0713 0.895 0.964 Ch7 LG/ULG 0.0853 0.949 0.957 Ch8 LG/ULG 0.0833 0.965 0.958
下载: 导出CSV
-
[1] Tomoyuki Urabe, Xiaoxiong Xiong,Taichiro Hashiguchi, et al. Radiometric model and inter-comparison results of the SGLI-VNR on-board calibration [J]. Remote Sensing, 2019, 12(1): 69. doi: 10.3390/rs12010069 [2] Guenther B , Barnes W , Knight E , et al. MODIS Calibration: A brief review of the strategy for the at-launch calibration approach [J]. Journal of Atmospheric and Oceanic Technology, 1996, 13(2): 274. doi: 10.1175/1520-0426(1996)0132.0.CO;2 [3] Baudin G, Matthews S, Bessudo R, et al. Medium-Resolution Imaging Spectrometer (MERIS) calibration sequence[C]//SPIE's 1996 International Symposium on Optical Science, Engineering, and Instrumentation, 1996. [4] Bruegge C J, Diner D J, Kahn R A, et al. The-misr-radiometric-calibration-process_2007_remote-sensing-of-environment [J]. Remote Sensing of Environment, 2007, 107(1): 2-11. [5] Barnes R A, Holmes A W. Overview of the SeaWiFS ocean sensor [J]. Proceedings of SPIE-The International Society for Optical Engineering, 1993,1939. doi: 10.1117/12.152849 [6] Begni G, Dinguirard M C, Jackson R D, et al. Absolute calibration of the SPOT-1 HRV cameras[C]//Earth Remote Sensing Using the Landsat Thermatic Mapper & Spot Sensor Systems, 1986. [7] Choi T, Cao C. S-NPP VIIRS day night band on-board solar diffuser calibration validation using the scheduled lunar collections [J]. Remote Sensing, 2021, 13(6): 1093. [8] Tang Hongzhao, Tang Xinming, Xie Junfeng, et al. On-orbit radiometric calibration and Validation of GF-7 satellite based on RadCalNet Baotou site [J]. National Remote Sensing Bulletin, 2023, 27(5): 1194-1204. doi: 10.11834/jrs.20221692 [9] Cui Z, Ma C, Zhang H, et al. Radiometric calibration of the multispectral imager onboard SDGSAT-1 over the dunhuang calibration site [J]. Remote Sens, 2023, 15(10): 2578. doi: 10.3390/rs15102578 [10] Tang H, Xiao C, Shang K, et al. Radiometric calibration of GF5-02 advanced hyperspectral imager based on RadCalNet baotou site [J]. Remote Sens, 2023, 15: 2233. doi: 10.3390/rs15092233 [11] Niu Chao, Tan Kun, Wang Xue, et al. Radiometric cross-calibration of the ZY1-02D hyperspectral imager using the GF-5 AHSI imager [J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 1-12. [12] Lee T F, Miller S D, Turk F J, et al. The day/night visible sensor aboard NPOESS VIIRS[C]//13th Conference on Satellite Meteorology and Oceanography, 2004. [13] Lee S, Sun C, Chiang V, et al. An overview of NASA VCST SNPP VIIRS day-night band on-orbit calibration methodology[C]//SPIE Optical Engineering + Applications, 2014. [14] Lee S, Mcintire J, Oudrari H, et al. A new method for Suomi-NPP VIIRS Day–Night band on-orbit radiometric calibration [J]. IEEE Transactions on Geoscience & Remote Sensing, 2014, 53(1):324-334. doi: 10.1109/TGRS.2014.2321835 [15] Mills S, Jacobson E, Jaron J, et al. Calibration of the VIIRS day/night band (DNB)[C]//American Meteorological Society 6th Annual Symposium on Future National Operational Environmental Satellite Systems-NPOESS and GOES-R, 2010. [16] 王琳, 张少辉, 李霄等 . 应用相位一致性评价多光谱遥感图像条带噪声 [J]. 红外与激光工程,2015 ,44 (10 ):3148 -3154 . Wang Lin, Zhang Shaohui, Li Xiao, et al. Assessing stripe noise of multispectral remote sensing image based on phase congruency [J]. Infrared and Laser Engineering, 2015, 44(10): 3148-3154. (in Chinese)[17] Sun Y J, Huang T Z, Ma T H, et al. Remote sensing image stripe detecting and destriping using the joint sparsity constraint with iterative support detection [J]. Remote Sensing, 2019, 11(6): 608. doi: 10.3390/rs11060608 [18] Singh S, Sheth R, Pandya A. Enhanced clustering algorithm for classification of datasets[C]//International Journal of Engineering Research & Technology, 2014. [19] Berzal F, Nicolfás Matín. Data mining: concepts and techniques by Jiawei Han and Micheline Kamber [J]. ACM Sigmod Record, 2002, 31(2): 66-68. doi: 10.1145/565117.565130 [20] Wang Z, Bovik A C, Sheikh H R, et al. Image quality assessment: from error visibility to structural similarity [J]. IEEE Trans Image Process, 2004, 13(4):600-612. doi: 10.1109/TIP.2003.819861 -

 点击查看大图
点击查看大图
计量
- 文章访问数: 66
- HTML全文浏览量: 11
- 被引次数: 0

