



 下载:
下载:

-
在高海况及复杂环境下,面向无人机和无人艇协同精准降落的需求,在水汽环境中同时精确测量彼此的距离和速度对于无人机安全着艇很有必要。在强风大浪和水汽环境中,常用的GPS导航[1]和视觉导航只适用于测量相对距离但无法测量相对速度,易出现动态定位精度不足等问题。若能同时精确测量无人机和无人艇的相对距离和速度,并实时反馈给控制系统,可以确保精确着陆。调频连续波(FMCW)激光雷达能够同时测量速度和距离,且无距离盲区,在无人机/艇协同自主精准着艇的应用有着广泛的前景。
FMCW激光雷达的光载波根据不同的测量目的有不同的频率调制方式[2]。常用的频率调制方式有三角波、锯齿波和正弦波三种。使用三角波形调制的FMCW激光雷达同时测量速度和距离是一种经济、方便的方法[3]。三角波调制时调制波形包含上升段和下降段,当目标移动时,上升段和下降段的拍频频率不相等,同时获取两段的拍频频率可以解调出准确的距离和速度信息。
由于频率可以通过简单的电流调制来实现,分布式反馈激光二极管(DFB-LD)、分布式布拉格反射激光器(DBR-LD)和垂直腔面发射激光器(VCSEL)常被用于FMCW激光雷达系统。出于对人眼安全的考虑,波长1550 nm以上的激光器被广泛应用在许多测速与测距中。然而在水/汽界面应用中,红外波段的光吸收严重。文中提出了采用近水汽透光窗口的632 nm分布式布拉格反馈(DBR)半导体激光器及基于FMCW技术的激光雷达系统,通过注入电流直接调制激光器波长来实现对称三角波的线性频率调制,其系统示意图如图1(a)所示,实验装置如图1(b)所示。激光器发出的调制光分成两路,一路作为探测光发射到目标物体上,另一路作为本振光。探测光照到被测目标上后被散射,散射光与本振光拍频,接收端的光电探测器采用相干外差探测技术接受拍频信号。同时,拍频信号由数字存储示波器(DSO)记录。此拍频信号的频率携带着目标距离和速度信息。将拍频信号进行快速傅里叶变换(FFT)等处理可以计算出目标距离和速度信息。经实验验证该系统调制带宽为12.5 GHz、调制周期为5 kHz(0.2 ms),可探测的距离范围为10~130 cm,速度范围为10~125 cm/s。
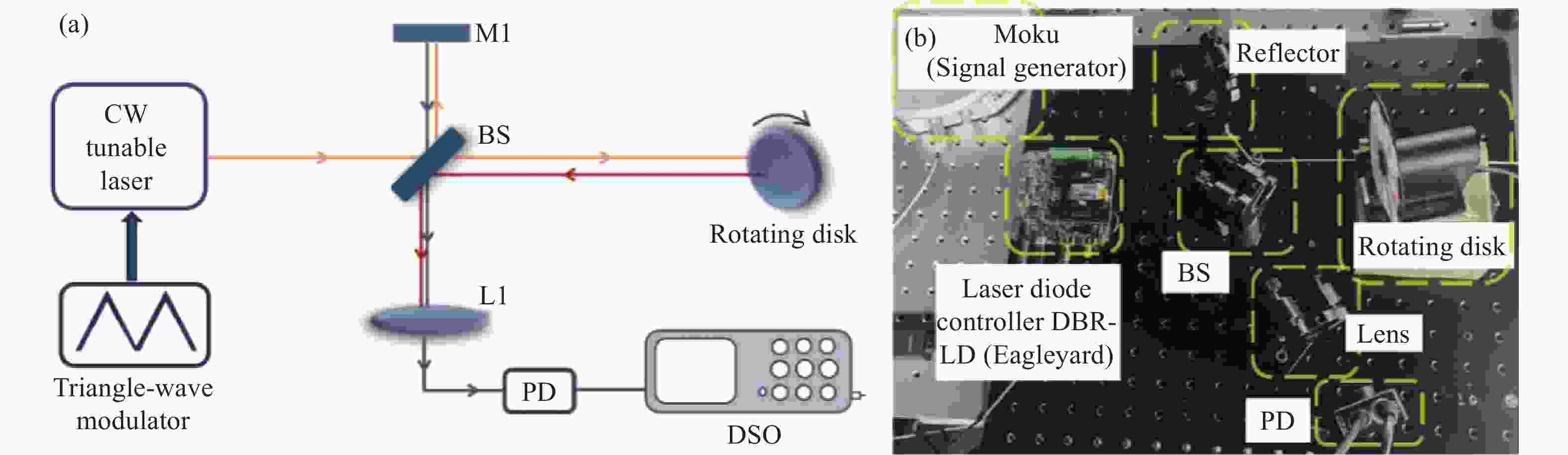
图 1 基于FMCW技术的激光雷达系统示意图与实验装置。(a) 基于FMCW技术的632 nm激光雷达系统的示意图。(BS:分光镜,PD:光电探测器,DSO:数字存储示波器);(b) FMCW 激光雷达系统的实验装置
Figure 1. Schematic diagram and experimental setup of the FMCW lidar system using 632 nm. (a) Schematic diagram of the FMCW lidar system using 632 nm. BS: beam splitter, PD: photodetector, DSO: digital storage oscilloscope; (b) Experimental setup of the FMCW lidar system
在距离FMCW系统10~130 cm处,以5 cm的步进移动被测目标物,验证了FMCW系统测量距离的准确性。FMCW系统测距实验结果与理论预测结果具有良好的相关性,如图2(a)所示,线性拟合曲线斜率为1.00121,R2为1,最大相对标准偏差RSD为1.5%。RSD由公式(1)定义。

图 2 基于FMCW技术的632 nm激光雷达系统的距离和速度测量实验结果。(a) FMCW 系统距离测量实验结果及理论预测之间的线性拟合曲线; (b) FMCW 系统和 CW 系统速度测量实验结果及其与参考速度之间的线性拟合关系
Figure 2. Experimental results of distance and velocity measurement of the FMCW lidar system using 632 nm. (a) The linear fit between the measured distance and the reference distance for the FMCW system; (b) Comparison of the measured speeds and their linear fits in the FMCW and CW systems
$$ RSD=\frac{S}{\bar{x}}\times 100\mathrm{\%}=\frac{\sqrt{{\displaystyle\sum_{i=1}^{n}{\left({x}_{i}-\bar{x}\right)}^{2}}/({n-1})}}{\bar{x}}\times 100\mathrm{\%} $$ (1) 式中:S为标准偏差(也可表示为 SD);$ \stackrel{-}{x} $为平均值。
再减小移动步进,进行距离分辨率实验验证,实验结果显示该系统测量距离的分辨率为1.5 cm。
通过测量标准转盘上某点的线速度,验证了FMCW激光雷达系统的测速性能。同时与连续波(CW)激光测速系统进行了对比实验,测量结果如图2(b)所示。线性拟合结果显示,在速度范围10~125 cm/s内,FMCW系统测量结果与参考速度的线性拟合曲线斜率为0.99991,R2为0.99999,测量分辨率为0.5 cm/s,最大相对标准偏差RSD为0.6%。而CW系统测量结果与参考速度的拟合曲线斜率为1.00214,R2为0.99999,最大相对标准偏差RSD为1.2%,大于FMCW系统。实验结果表明FMCW激光雷达系统不仅实现了目标速度和距离的同步测量,而且比连续波(CW)激光测速系统的测速精度更高。
Application of 632 nm FMCW lidar for simultaneous velocity and distance measurement in humid environment
-
摘要: 在高海况及复杂环境下,面向无人机和无人艇协同精准降落的需求,在水汽环境中同时精确测量彼此的距离和速度对于无人机的安全着艇很有必要。针对这一需求,提出了一种基于可见光波长、调频连续波(FMCW)原理的同时测速和测距的激光雷达系统并开展了实验验证。该系统采用了三角波电流调制信号直接注入调制激光器,利用激光入射到被测目标物上产生的散射信号光与本振光发生干涉产生拍频信号,解调出被测目标物的速度和距离信息。实验结果显示,该技术可以实现距离测量范围10~130 cm,分辨率1.5 cm,最大相对标准偏差1.5%;速度测量范围10~125 cm/s,速度分辨率0.5 cm/s,最大相对标准偏差0.6%。Abstract:
Objective In high sea conditions and complex environments, for achieving safe landing of unmanned aerial vehicles (UAV) on unmanned surface vehicles (USV), it is necessary to accurately measure the distance and speed simultaneously between them and provide real-time feedback to the control system. However, commonly used GPS navigation and vision-based navigation approaches often suffer from insufficient dynamic positioning. These technologies could only measure distance but not the relative speed between UAV and USV. Frequency modulated continuous wave (FMCW) lidar, which could simultaneously measure both velocity and distance, has great potential for application in autonomous landing between UAV and USV during high sea conditions.For different applications, FMCW lidar could utilize different frequency modulation schemes on the optical carrier. Commonly used frequency modulation scheme includes the triangular, the sawtooth, and the sinusoidal waveforms. It is an economical and convenient approach to measure velocity and distance simultaneously using a triangular waveform modulated FMCW lidar. Considering eye safety, FMCW lidar normally deploys lasers with wavelengths longer than 1550 nm. However, the light absorption in the moisture above air/sea surface is too large for the infrared wavelength range. Methods In this paper, the lidar system employing a 632 nm distributed Bragg reflector (DBR) semiconductor laser which operating the water vapor transmission wavelength band and an FMCW technology was proposed and experimentally demonstrated. The symmetric triangular waveform modulation was achieved by directly modulating the laser injection current. The schematic diagram of the system is shown in Fig.1(a), and the experimental setup of the system is shown in Fig.1(b). The modulated laser output, with continuous frequency tuning, was further divided into two beams by a beam splitter (BS). Of which, one beam is used as the reference light, and another beam is used as the detection beam and incident on the measurement target. The detection light, which is reflected (or scattered) by the target, is collected and mixed with the reference light by a photo-detector (PD) for coherent heterodyne detection. The beating signal that carries information about the distance and velocity of the target is recorded by a digital storage oscilloscope (DSO). By performing operations such as fast Fourier transform (FFT), the beat frequencies of the up-sweep and down-sweep bands could be obtained, and then the distance and velocity information of the target could be calculated. The experimental results show that the modulation bandwidth of the system is 12.5 GHz without mode hopping using the internal modulation scheme of direct current injection, and the modulation period is 5 kHz(0.2 ms). Results and Discussions The measurement accuracy of distance of this FMCW system was tested by moving the target with 5 cm a step, ranging from 10 cm to 130 cm. The measured distances of the target were compared to the reference distances, as shown in Fig.2(a). The results demonstrate a strong correlation between the measured distance and the reference distances, with a linear fitting curve slope of 1.00121, R-squared value of 1, and a maximum relative standard deviation (RSD) of 0.3. The RSD is defined by the following formula, where S is the standard deviation (also denoted as SD) and $ \bar{x} $ is the mean value. $RSD=\dfrac{S}{\bar{x}}\times 100\mathrm{\%}=\dfrac{\sqrt{{\displaystyle\sum_{i=1}^{n}{\left({x}_{i}-\bar{x}\right)}^{2}}/({n-1})}}{\bar{x}}\times 100\mathrm{\%} $ Further reducing the step size for movement to test distance resolution, experimental verification showed that the system's distance resolution is 1.5 cm. The accuracy of velocity measurement of the FMCW system was verified by measuring the linear speed of a scattering point on the standard rotating disc with high-precision control of the rotational frequency. A comparative experiment was conducted with a continuous wave (CW) system using the same laser operated under continuous wave. The results of the speed measurement are shown in Fig. 2(b). The linear fitting results show that within the velocity range of 10 cm/s to 125 cm/s, the FMCW system has a linear fitting curve slop of 0.99991 and an R-squared value of 0.99999 when compared to the reference velocity. The measurement resolution is 0.5 cm/s with RSD of 0.6%. On the other hand, The CW system has a fitting curve slope of 1.00214, an R-squared value of 0.99999, and a RSD of 1.2%, which is higher than that of the FMCW system. The experimental verification demonstrates that the FMCW system not only achieves synchronous measurement of target velocity and distance, but also provides a higher speed measurement accuracy than the continuous wave (CW) laser speed measurement system. Conclusions When UAV is performing precise landing on USV in high sea conditions, it is important to measure both the velocity and distance between them simultaneously. In response to this requirement, this paper proposed and experimentally demonstrated a lidar system based on the 632 nm laser which was frequency-modulated by continuous wave (FMCW) for simultaneous measurement of both velocity and distance. The 632 nm semiconductor laser was modulated by a directly injected triangular-wave current. The modulated light was incident on the moving target. The beat frequency signal generated by the interference of the scattered light from the target and the reference light was demodulated to extract information about the velocity and distance. The experimental results show that the FMCW lidar system has a measured distance range of 10 cm to 130 cm, with a resolution of 1.5 cm and a relative standard deviation (RSD) of 1.5%. The measured speed range was from 10 cm/s to 125 cm/s, with a resolution of 0.5 cm/s and a relative standard deviation (RSD) of 0.6%. -
Key words:
- FMCW /
- lidar /
- velocity measurement /
- distance measurement
-
图 1 基于FMCW技术的激光雷达系统示意图与实验装置。(a) 基于FMCW技术的632 nm激光雷达系统的示意图。(BS:分光镜,PD:光电探测器,DSO:数字存储示波器);(b) FMCW 激光雷达系统的实验装置
Figure 1. Schematic diagram and experimental setup of the FMCW lidar system using 632 nm. (a) Schematic diagram of the FMCW lidar system using 632 nm. BS: beam splitter, PD: photodetector, DSO: digital storage oscilloscope; (b) Experimental setup of the FMCW lidar system
图 2 基于FMCW技术的632 nm激光雷达系统的距离和速度测量实验结果。(a) FMCW 系统距离测量实验结果及理论预测之间的线性拟合曲线; (b) FMCW 系统和 CW 系统速度测量实验结果及其与参考速度之间的线性拟合关系
Figure 2. Experimental results of distance and velocity measurement of the FMCW lidar system using 632 nm. (a) The linear fit between the measured distance and the reference distance for the FMCW system; (b) Comparison of the measured speeds and their linear fits in the FMCW and CW systems
-
[1] Yang T, Li G, Li J, et al. A ground-based near infrared camera array system for UAV auto-landing in GPS-denied environment[J]. Sensors , 2016, 16(9): 1393-1412. [2] Stann B L, Ruff W C, Sztankay Z G. Intensity-modulated diode laser radar using frequency-modulation/continuous-wave ranging techniques[J]. Optical Engineering , 1996, 35(11): 3270-3278. [3] Dong Y, Zhu Z, Tian X, et al. Frequency-modulated continuous-wave LIDAR and 3D imaging by using linear frequency modulation based on injection locking[J]. Journal of Lightwave Technology , 2021, 39(8): 2275 - 2280. -

 点击查看大图
点击查看大图

计量
- 文章访问数: 41
- HTML全文浏览量: 10
- PDF下载量: 20
- 被引次数: 0

