



 下载:
下载:

-
在物理海洋科学研究中,海水流速是关键参数之一,主要采用声学多普勒流速仪。近年来,激光多普勒技术在海水流速测量中得到了较大的发展。激光差分多普勒流速仪,因其结构简单易于集成,有望成为与声学多普勒流速仪互补的测量技术。其测量原理如图1(a)所示。一束激光在通过单模光纤后被光纤分束器分成功率相等的两束光,再由准直器将两束光准直成平行光束,射入到放置在末端的平凸透镜,其聚焦功能将两束平行光束聚焦到仪器外部的某一点并在此焦点处产生干涉条纹。当水中的粒子经过干涉条纹时产生散射,散射信号被平凸透镜转为平行光汇集到仪器中,进一步经过聚焦透镜投射到雪崩二极管收集并被转为电信号,由示波器对电信号进行采集,然后对采集到的信号进行算法处理并解调出流速[1]。图1(b)为光学系统样机在青岛近海海洋环境中测试的现场照片。

图 1 (a)双光束-双散射原理光路结构示意图(LD:激光器,SMF:单模光纤,Splitter:分束器,Collimator:准直器,Focus lens:聚焦透镜,DSO:数字示波器,PC:电脑);(b)光学系统样机海试现场照片
Figure 1. (a) Schematic diagram of the optical path structure of the double beam-double scattering principle (LD: laser, SMF: single-mode fiber, Splitter: beam splitter, Collimator: collimator, Focus Lens: focusing lens, DSO: digital oscilloscope, PC: computer); (b) Sea test photos of the optical system prototype
相比于声学测速技术,激光差分多普勒流速仪的优势包括:其更短的波长(微米级)可以开展更小尺度的水团研究;搭载到无人水下载具测速时可以抗水下载具自身产生的噪声干扰等[2]。然而,由于海水吸收和散射,所探测到的信号极其微弱而且埋没在较强的噪声当中,对多普勒信号的解调带来了挑战;受制于采样频率,得到的数据谱峰位置与真实频率存在误差。因此,有效去除噪声干扰,提高测量准确度成为了激光多普勒测速仪的关键技术。文中采用自适应滤波算法对采集的信号去噪并进行快速傅里叶变换,提高了信噪比。比较了三种寻峰算法,并优选了Gaussian-LM算法对信号的功率谱进行寻峰处理,使得功率谱峰值位置接近真实的谱峰值,提高了多普勒信号的解调精度,大大降低了噪声带来的误差。
从大量噪声中精确地提取出多普勒频移是信号处理的关键,而多普勒信号的噪声是非平稳的。因此,可以利用最小均方误差算法对多普勒信号进行有效去噪[3]。快速傅里叶变换可将研究的重心从时域转为频域,更容易分析多普勒频率的规律。
通过仿真选取最佳的寻峰算法,利用蒙特卡洛算法、高斯拟合算法、Gaussian-LM算法分别对加入噪声的高斯信号进行寻峰并对比测量准确度,结果如图2(a)所示。对多组数据进行寻峰计算,其标准差如图2(b)所示,结果表明,蒙特卡洛算法所展现的寻峰精度最低,Gaussian-LM算法的寻峰精度最高。而且Gaussian-LM算法比其他算法具有更小的标准差、更低的波动范围,稳定性更好。因此,选取Gaussian-LM算法对多普勒信号进行寻峰。

图 2 (a)不同算法寻峰误差;(b)不同算法寻峰标准差
Figure 2. (a) Peak search error of different algorithms; (b) Standard deviation of peak search for different algorithms
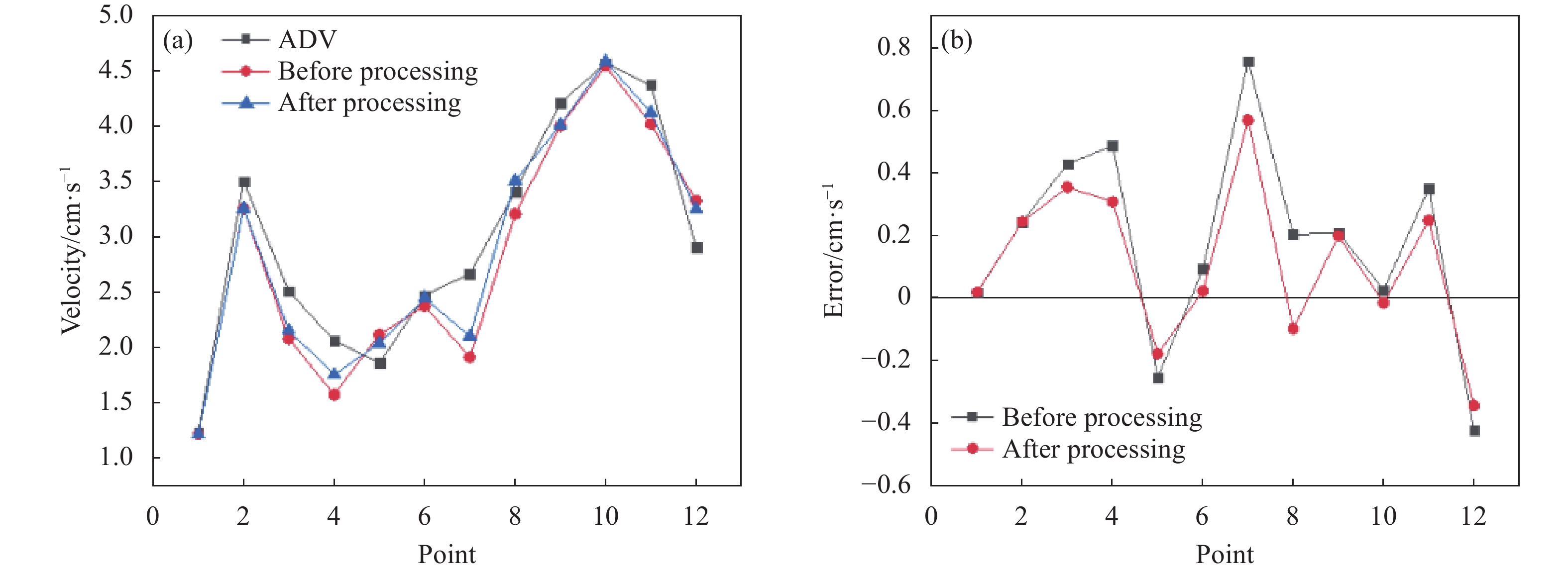
在青岛中苑码头海边基于自研的光学差分多普勒流速仪(LDV)与声学多普勒单点式流速仪(ADV型号: SonTek,Argonaut-ADV),开展了海水流速的比测试验。针对获得的海水流速测量数据开展了算法研究。考虑到两者具有不同的采样率,首先对获得的数据作30分钟平均。由图3(a)可以看出,算法处理前的数据与ADV所测得的流速值趋势一致,但仍存在误差。而经算法处理后的数据,与ADV所测得的数据拟合程度更高。图3(b)为分别用ADV对处理前和处理后的数据求得误差,并计算平均误差。通过误差分析得知,处理前LDV与ADV比测平均误差为0.2905 cm/s,处理后LDV与ADV比测平均误差为0.2163 cm/s,误差降低了25.5%。
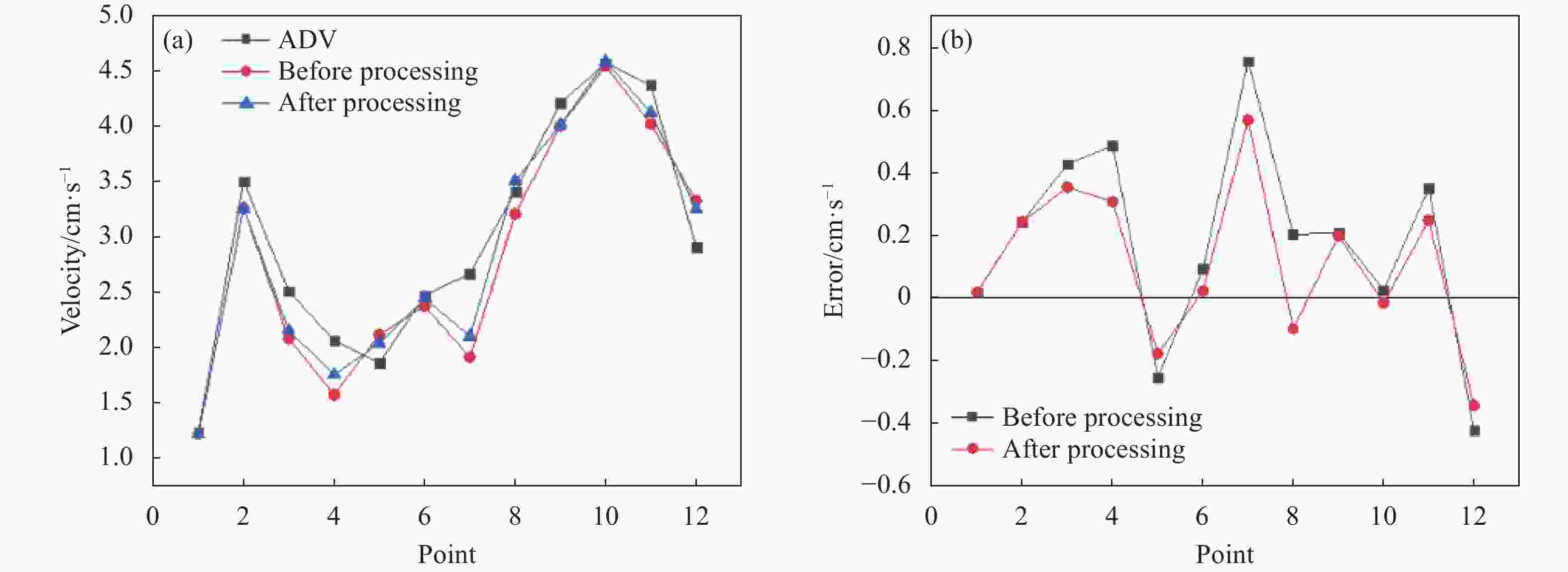
图 3 (a)经算法处理前后与ADV比测结果;(b)经过算法处理前后与ADV的误差对比
Figure 3. (a) Compared with ADV before and after algorithm treatment; (b) Error comparison with ADV before and after algorithmic processing
海水中悬浮粒子对光散射的信号非常微弱。将淹没在噪声中的信号提取出来并解调出流速测信息是激光多普勒流速仪实现准确测量的挑战。文中针对从青岛近海实验中获得的流速数据开展了解调算法的研究。首先通过模拟仿真优选出Gaussian-LM算法作为寻峰算法。针对实际海试中测得的流速数据,基于LMS算法开展了信号去噪并结合Gaussian-LM算法进行寻峰,实现了高精度解调。自研的激光多普勒流速仪与业界著名的声学多普勒流速仪的比测实验数据表明,经过该算法处理之后的流速测量误差为0.21 cm/s,比处理之前的误差降低了25.5%。
Verification of demodulation method for differential optical Doppler velocimetry data
-
摘要: 光学多普勒差分流速仪在测量海水流速时,由于信号微弱和噪声干扰,接收信号信噪比很低,信号解调面临挑战,可能导致较大的测量误差。为了准确解调埋藏在噪声中的信号并获取速度信息,需要对获取的海试测量数据进行进一步算法处理。采用自适应滤波算法有效降低了多普勒信号中混杂的高频噪声干扰,提高了海试原始数据频域信号的信噪比,并利用寻峰算法更准确地获取了谱峰值。结果表明,与直接读取原始数据的谱峰值相比,经过该算法处理后,激光差分多普勒流速仪与声学多普勒流速仪比测的流速拟合度平均误差为0.2163 cm/s,误差降低了25.5%,表明该算法对激光多普勒测速信号解调是有帮助的。Abstract:
Objective In the field of physical oceanographic research, seawater flow velocity is one of the key parameters, primarily measured using acoustic Doppler velocimeters. In recent years, laser Doppler technology has made significant advancement in seawater flow velocity measurement. Laser Doppler velocimetry, with its simple and integrable structure, is expected to be a complementary technique with acoustic Doppler velocimeters in marine applications. Compared to acoustic velocity measurement techniques, laser Doppler velocimeters offer several advantages: their shorter wavelength (in the micron range) allows for the study of smaller-scale water features, and they can resist noise interference generated by underwater vehicles when used with unmanned underwater vehicles. However, due to seawater absorption and scattering, the detected signal is extremely weak and buried in strong noise, posing challenges for Doppler signal demodulation. Moreover, limited by the sampling frequency, there exists an error between the peak position of the obtained data spectrum and the true frequency. Therefore, effectively removing noise interference and improving measurement accuracy are crucial for laser Doppler velocimeters. In this paper, an adaptive filtering algorithm is employed to denoise the collected signal, followed by fast Fourier transform to enhance the signal-to-noise ratio. Three peak-finding algorithms are compared, and the Gaussian-LM algorithm is selected to process the power spectrum of the signal, bringing the peak position closer to the real peak value and thereby improving the demodulation accuracy of the Doppler signal and significantly reducing the error caused by noise. Methods The principle of laser Doppler velocimetry is illustrated in Fig.1(a). A laser beam is split into two equal beams by an optical fiber splitter after passing through a single-mode optical fiber. These two beams are then collimated into parallel beams by a collimator and directed onto a plano-convex lens at the end, which focuses the parallel beams onto a specific point outside the instrument, generating interference fringes at this focal point. When particles in the water pass through these interference fringes, they scatter light, which is collected by the plano-convex lens and converted into parallel light. This scattered light is then collected by an avalanche photodetector and converted into an electrical signal, which is acquired by an oscilloscope. The acquired signal undergoes algorithm processing to demodulate the flow velocity. Fig. 1(b) is a field photo of the optical system prototype being tested in the Marine environment off Qingdao. The key to signal processing is accurately extracting the Doppler frequency shift from a large amount of noise, and the noise in the Doppler signal is non-stationary. Therefore, the least mean square error algorithm can be utilized to effectively denoise the Doppler signal. Fast Fourier transform shifts the focus of the research from the time domain to the frequency domain, where it is easier to analyze the regularity of the Doppler frequency. Further, the Gaussian-LM algorithm is employed to perform peak finding on the Doppler signal, obtaining accurate frequency information. Results and Discussions Through simulation, the optimal peak finding algorithm was selected. The Monte Carlo algorithm, Gaussian fitting algorithm, and Gaussian-LM algorithm were employed to perform peak finding on Gaussian signals with added noise, and their measurement accuracies were compared, as shown in Fig.2(a). Peak finding calculations were conducted on multiple datasets, and their standard deviations are illustrated in Fig.2(b). The results indicate that the Monte Carlo algorithm exhibited the lowest peak finding accuracy, while the Gaussian-LM algorithm demonstrated the highest accuracy. Moreover, the Gaussian-LM algorithm exhibited smaller standard deviation compared to other algorithms, with a lower fluctuation range, indicating greater stability. Therefore, the Gaussian-LM algorithm was chosen for peak finding in the Doppler signal. A comparative experiment on seawater velocity was conducted at the Zhongyuan Tourist Dock in Qingdao, China, using a home-made optical Doppler velocimetry (LDV) and an acoustic Doppler velocimeter (ADV model: SonTek Argonaut-ADV). Algorithmic research was carried out on the obtained seawater velocity measurement data. Considering the different sampling rates of the two instruments, the data were first averaged over 30 minutes. From Fig.3(a), it can be observed that the data before algorithm processing roughly align with the trend of velocity values measured by ADV, but there are still discrepancies. However, the data after algorithm processing shows a higher degree of fitting with the data measured by ADV. Fig.3(b) illustrates the errors obtained by ADV for the data before and after processing, and presents the calculation of the average error. Through error analysis, it shows that the average error between the pre-processed LDV and ADV velocity measurements was 0.2905 cm/s, while the average error between the post-processed LDV and ADV velocity measurements was 0.2163 cm/s, indicating a reduction in error of 25.5%. Conclusions The signal of light scattering from suspended particles in seawater is extremely weak. Extracting signals submerged in noise and demodulating them to obtain velocity information poses a challenge for accurate measurements with laser Doppler velocimeters. In this paper, demodulation algorithms based on velocity data obtained from experiments in the near-shore of Qingdao were studied. Initially, through simulation and optimization, the Gaussian-LM algorithm was selected as the peak finding algorithm. Subsequently, signal denoising was performed based on the Least Mean Square (LMS) algorithm on the actual velocity data obtained during sea trials, combined with the Gaussian-LM algorithm for peak finding, achieving high-precision demodulation. Comparative experiments between home-made laser Doppler velocimeter and a well-known commercial acoustic Doppler velocimeter indicate that the post-processed velocity measurement error based on this algorithm is 0.21 cm/s, representing a 25.5% error reduction compared to the pre-processing velocity measurement error. -
图 1 (a)双光束-双散射原理光路结构示意图(LD:激光器,SMF:单模光纤,Splitter:分束器,Collimator:准直器,Focus lens:聚焦透镜,DSO:数字示波器,PC:电脑);(b)光学系统样机海试现场照片
Figure 1. (a) Schematic diagram of the optical path structure of the double beam-double scattering principle (LD: laser, SMF: single-mode fiber, Splitter: beam splitter, Collimator: collimator, Focus Lens: focusing lens, DSO: digital oscilloscope, PC: computer); (b) Sea test photos of the optical system prototype
图 2 (a)不同算法寻峰误差;(b)不同算法寻峰标准差
Figure 2. (a) Peak search error of different algorithms; (b) Standard deviation of peak search for different algorithms
-
[1] Song Ran, Hao Xianglong, Jing Xuyang, et al. Optical waveguide-type laser interference velocimeter for measurement of ultra-low speeds [J]. IEEE Sensors Journal, 2022, 22(13): 12776-12783. doi: 10.1109/JSEN.2022.3178172 [2] Song Ran, Zhang Xinyu, Jiang Lili, et al. An integrated interferometric fiber optic sensor using a 638 nm semiconductor laser for air-water surface velocity measurements[J]. Sensors , 2023, 23(4): 1795. [3] Zhao Hongchang, Zhou Jian, Yang Kaiyong. Laser Doppler signal processing based on least mean square adaptive filter [J]. Optik-International Journal for Light and Electron Optics, 2013, 124(17): 2781-2783. doi: 10.1016/j.ijleo.2012.08.043 -

 点击查看大图
点击查看大图

计量
- 文章访问数: 35
- HTML全文浏览量: 8
- PDF下载量: 10
- 被引次数: 0

