







-
近年来,磁场测量技术因其应用领域广泛发展十分迅速。在医用方面的脑磁图和心磁图,军用方面的深海探潜,民用方面的矿物勘探与辨识方位等领域,磁强计已经成为不可或缺的核心设备[1]。磁强计的测量灵敏度直接影响获取磁场或位置信息的准确性。目前测量灵敏度达到亚fT量级的磁强计只有无自旋交换弛豫 (Spin-Exchange Relaxation-Free, SERF) 原子磁强计。在原子磁强计的测量中需要应用到高精度的激光器。激光器主要可分为三种:法布里-珀罗型激光器(FP),分布反馈激光器(DFB),垂直腔表面发射半导体(VCSEL)激光器。其中,VCSEL激光器与其他的激光器相比具有体积小、圆形输出光斑、单纵模输出、阈值电流小、价格低廉、易集成为大面积阵列等优点[2]。
目前,激光器的控制研究主要针对于DFB激光器[3-4],对VCSEL的研究非常少。激光器温度控制的传感方式主要依靠温度传感器,热敏电阻与热电偶来实现,通过采集直流电压值换算出实际温度值。但由于直流的电压信号产生方向恒定的磁场,对于测量磁场来说不能处理。而交变电压产生变化的磁场,通过滤波的方法可以解决对测量造成的影响。控制方法上大多数采用不需要数学模型的控制方法来解决温控过程中环境温度引起的参数时变问题,如模糊PID,遗传算法,神经网络等方法,但并没有很好地分析解决环境温度干扰的问题。控制精度上,中国科学院张龙等人的大功率半导体激光器驱动电源及温控系统设计,控制精度为±0.05 ℃[5]。合肥工业大学戴俊珂等人的基于自整定模糊PID算法的LD温度控制系统,控制精度为0.015 ℃[6]。重庆人文科技学院杨芳权等人的基于遗传算法的半导体激光器温度控制系统,控制精度为±2 m℃[7]。综上所述,为符合SERF原子磁力计的使用条件,提高温度控制精度,找到一种可以适应环境变化的控温方法十分重要。
针对以上问题,文中首先采用DPSD的方法实现对交流温控采集温度信号进行解调。然后通过系统辨识的方法建立VCSEL激光器的温度控制模型。最后应用干扰观测器与内模控制原理设计控制器来解决被控对象随环境温度变化造成的参数时变摄动和激光器温度不稳定问题。
-
温度对激光器的稳定性有着直接的影响。VCSEL输出的光功率可以由公式(1)所示:
式中:
${P_{\rm{o}}}$ 为激光器输出光功率;$\eta \left( T \right)$ 为激光器转换效率;$I$ 为激光器驱动电流;${I_{\rm th}}\left( {N,T} \right)$ 为激光器阈值电流。由公式(1)可知:激光器的转换效率、阈值电流与温度相关,光功率的稳定性取决于温度与激光器注入电流的稳定性。而且温度的变化会影响半导体PN结的带隙,从而影响腔增益曲线的峰值波长。文中被控对象选用VIXAR公司的795 nm的VCSEL激光器,波长对电流的增益系数为0.4 nm/mA,波长对温度的增益系数为0.055 nm/°C。
为了解决环境温度变化造成的激光器控制性能下降问题,需要根据VCSEL激光器结构和系统辨识方法建立物理模型。
-
VCSEL的温控结构包括VCSEL激光器、热沉与连接用的硅片三部分组成,温度传感通过NTC电阻10K3CG来实现。加热装置采用镍铬合金加热丝。硅片嵌入到热沉内,其结构如图1所示。

Figure 1. Structure diagram of laser temperature control model
整个装置的每一部分都具有热容量,模型较为复杂。单一材料储热物体的传热模型可以由一阶惯性模型
$\dfrac{K}{{T{\rm{s}} + 1}}$ 表示,针对上述VCSEL激光器结构而言,系统主要由热沉、NTC热敏电阻、导热硅板、VCSEL激光器4个储热物体构成。系统的传递函数可以等效成4个一阶惯性模型串并联而成,可以由如下四阶传递函数表示。 -
系统辨识是模型参数估计的有效方法,文中采用在阶跃响应下的递推最小二乘法(RLS)来估计模型参数。以AD605芯片输出电压的平方为输入信号,温度为输出信号,该模型的微分方程为:
式中:
${{y}}\left( t \right)$ 为系统输出信号;$u\left( t \right)$ 为输入信号;$\zeta \left( t \right)$ 为高斯白噪声。将公式(3)两端积分4次可得:
式中:
${{{y}}^{\left[ 1 \right]}}\left( t \right)$ 、${{{y}}^{\left[ 2 \right]}}\left( t \right)$ 、${{{y}}^{\left[ 3 \right]}}\left( t \right)$ 、${{{y}}^{\left[ 4 \right]}}\left( t \right)$ 为系统输入信号的1~4次积分;$h$ 为阶跃信号幅值;A、B、C、D、E、F、G、H为待辨识参数。将公式(4)写成最小二乘形式,即:
式中:
根据公式(6)的递推最小二乘公式即可算出参数的估计值,实验取100 Hz采样,2 Hz的频率抽点去迭代计算,即h=0.5 s。
实验在室温25 ℃下进行,由于环境温度不完全恒定,存在一定的参数摄动,但变化很小。经过多次实验后,求出参数估计值基本相同,参数估计结果如下。
对比其中一组数据,残差平方和J=38.8927。拟合结果以及残差值如图2所示,残差在0.35 ℃以内,可以把估计出的模型作为名义模型使用。

Figure 2. Estimation result of laser temperature control system model
-
SERF原子磁强计的使用一共需要两路光源,即驱动光源与检测光源。文中利用STM32F407作为主控器,同时控制两路温控,其系统结构如图3所示。
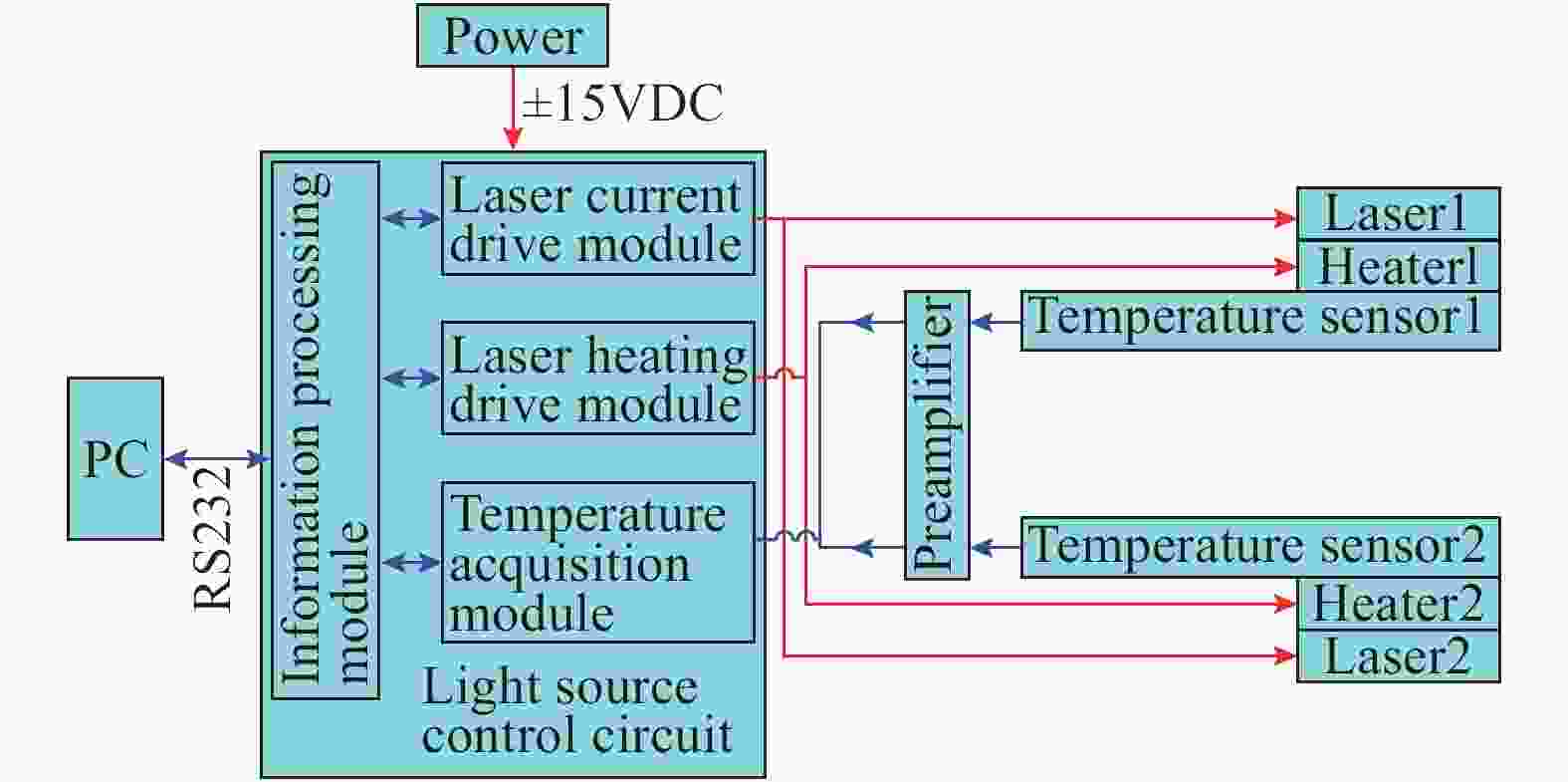
Figure 3. Laser control circuit for SERF magnetometer
-
文中针对原子磁强计应用过程中直流温控会对磁场测量结果产生干扰且无法滤除的问题,设计交流温度控制系统。交流温度控制系统一共分为3部分组成,即交流驱动部分、交流检测部分、解调与温度解算部分组成。其中,解算方法直接影响测量值的准确度与分辨率,进而影响控制精度。目前,解调的方法包括数字和模拟两种方式,而数字解调具有低噪声和有强抗干扰能力。文中利用数字相敏检波(DPSD)的方法获得高分辨率、低噪声的温度信号。
-
交流温控驱动电路如图4所示,由stm32控制直接数字频率合成器(DDS)U10产生10 kHz幅值固定的正弦波激励信号,经过低通滤波和运放跟随后进入可变增益放大器(VGA)U12,通过DA设定Temp1_set的值调节增益大小来改变正弦波的幅值。

Figure 4. Drive circuit of AC temperature control
AD605的增益系数可由公式(7)计算,AD605为对数放大器,增益单位为dB/V。
式中:
$G_{\rm{ain}}$ 为增益系数;$V_{\rm{ref}}$ 为AD605参考电压值,文中为1.6384 V。输出电压增益可由公式(8)计算,单位为dB:
式中:
${G_{\rm{u}}}$ 为输出电压增益;$Temp1\_{\rm{set}}$ 为DA输出电压值。由公式(9)、(10)可推出AD605输出电压的平方和输入电压的关系,计算公式如(11)所示:
最后AD605输出电压经过电流反馈型功率放大器LT1210后,将正弦信号进行交流放大7.5倍去驱动加热片加热。
-
交流检测部分由激励和传感电桥两部分构成。激励源选用8 kHz的正弦信号。激励源与驱动部分相同,但需要经过交流放大和模拟四阶巴特沃兹带通滤波器,使传感电桥的激励信号可以滤除带外噪声。滤波器电路如图5(a)所示,滤波器幅频特性曲线如图5(b)所示。

Figure 5. Filter for AC detection signal
传感电桥选用惠更斯电桥接法,固定桥电阻为1.69 K。其中测量温度电阻选用NTC热敏电阻10K3CG,70 ℃灵敏度大约60 Ω/℃。电桥输出信号经过仪表放大器放大51倍后由ADAU1401A的AD转换器采集电压值。
电桥输入电压与ADAU1401A采集电压值的关系如下式所示:
式中:
${U_{\rm{{ADin}}}}$ 为ADAU1401A采集电压值;${U_{\rm{Bridge}}}_{{\rm{in}}}$ 为电桥输入激励电压幅值;${R_{{\rm{hot}}}}$ 为热敏电阻阻值;$R$ 为电桥固定桥臂电阻阻值;${\rm{gain}}$ 为仪表放大器放大倍数。由公式(10)可知:在70 ℃附近每变化1 m℃采集电压变化大约为0.9 mV。其中,AD转换器具有24 bit电压分辨率。SNR和动态范围都为100 dB,有效位数至少为16位。AD的采集量程选用为±3.4 V,即AD的准确度为0.1 mV,综上所述系统采集精度为0.1 m℃。
-
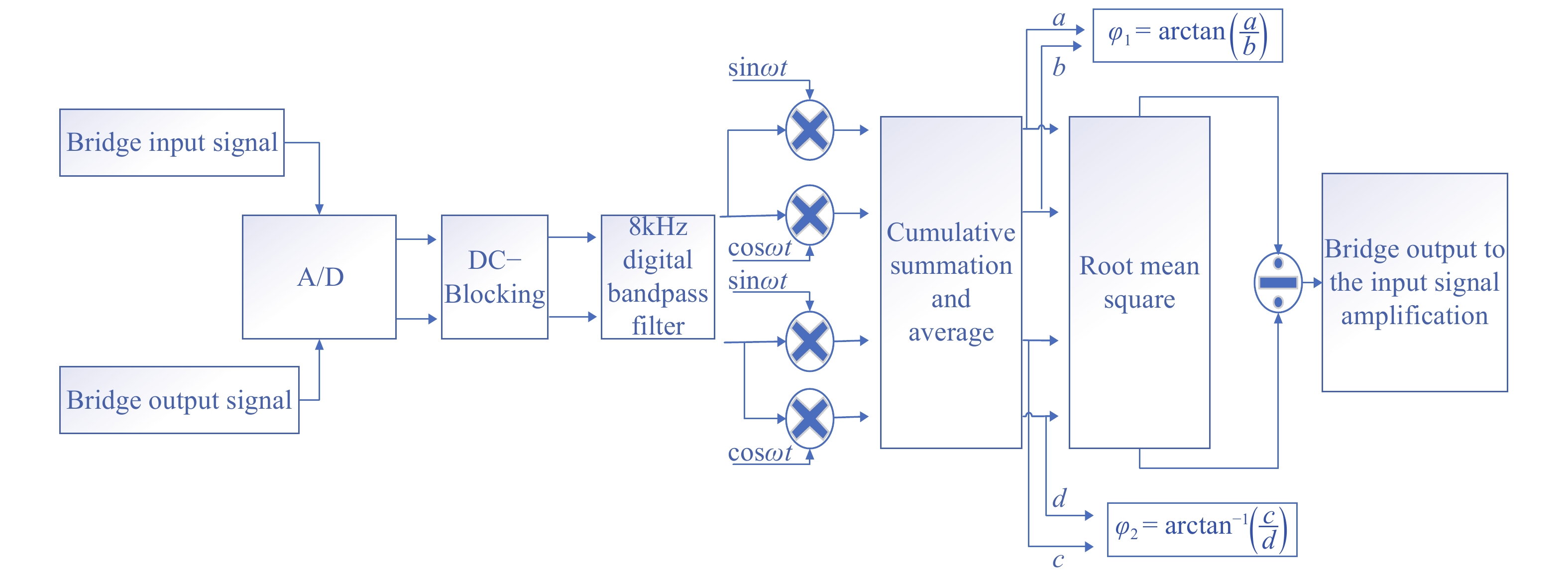
调幅信号解调方法包括数字解调和模拟解调两种方式,其中模拟解调方法通过运放搭建乘法器电路来实现。但模拟解调与数字解调相比,由于模拟器件的本身特性,模拟器件本身会引入噪声,以至于有用信号与无用信号分离不够彻底。并且数字解调的抗干扰能力要强于模拟解调,从而影响解调后信号的测量精度和分辨率。文中采用数字相敏检波(DPSD)算法,通过ADAU1401A对载波为8 kHz正弦波信号对温度信号进行解调。实现过程如图6所示。

Figure 6. Demodulation flowchart of DPSD method for AC bridge
解调首先采集电桥的激励信号与电桥的被测信号。A/D转换后,经过数字方式写成的DC-Blocking模块,其z变换传递函数表达式如下:
式中:R为滤波系数。之后通过带通滤波器完成信号的预处理。由ADAU1401A内部产生数字参考正弦与余弦信号。该参考信号r可由公式(14)表示:
设未解调前信号幅值为Y,由于有电路噪声和白噪声的影响可由下式表示:
将式(14)、(15)进行互相关运算可得:
由于
$\zeta \left( n \right)$ 与${{r}}\left( n \right)$ 无关,所以${R_{\zeta r}}\left( m \right)$ =0。显然,可以求出正弦波相位与幅值,即解调以48 kHz的速度对8 kHz信号进行采样,以相邻480个点平均滑动滤波后的结果进行结算。通过公式(15)分别求出电桥激励信号与被测信号的幅值与相位。若电桥激励信号的幅值与相位分别为
${Y_1}$ 与${\varphi _1}$ ,被测信号的幅值与相位分别为${Y_2}$ 与${\varphi _2}$ 。引入电桥输入电压与ADAU1401A采集电压值的放大倍数符号函数${\rm{sign}}$ ,放大倍数大小为${{{A}}_{\rm{u}}}$ 有:结合公式(10)、(16),即可通过DPSD的方法解算出电桥中热敏电阻的阻值,从上述分析可知,与模拟解调方式相比,数字相敏检波对噪声有很强的抑制作用。
热敏电阻阻值还需要转换成温度,文中用的电阻为NTC电阻,因此,选用最佳数学表达式去实现阻值与温度的转换,即Steinhart方程。
式中:A、B、C为NTC热敏系数。文中10K 3CG的拟合系数为
$8.762{{\rm e}^{ - 8}}$ ,$2.341{{\rm e}^{ - 4}}$ ,$1.129{{\rm e}^{ - 3}}$ 。 -
半导体激光器温度控制的问题是由环境温度的干扰下模型参数发生慢时变摄动引起,并且会对被控对象的温度控制产生影响。为了提高稳定性、抗干扰能力与鲁棒性,文中根据上述辨识模型,采用干扰观测器的方法估计环境温度变化带来的影响进行补偿,根据内模控制原理设计控制器,使系统实现响应速度快、低超调。
-
干扰观测器是由C.J.Kempf等提出的[8],基本思想是将模型参数变化与外部干扰造成的实际模型与名义模型的差异等效到控制的输入端。即观测出等效干扰,在控制中引入等量的补偿。控制框图如图7所示。图中
$Q\left( {{s}} \right)$ 为低通滤波器,${G_{\rm{p}}}\left( {{s}} \right)$ 为被控对象实际模型,${G_{{n}}}^{ - 1}\left( {{s}} \right)$ 为名义模型的逆,$C\left( {\rm{s}} \right)$ 为控制器 。
Figure 7. Equivalent block diagram of disturbance observer
干扰观测器除模型外还需要设计低通滤波器
$Q\left( {{s}} \right)$ ,$Q\left( {{s}} \right)$ 的性能直接影响干扰观测器的鲁棒稳定性与干扰抑制能力,由于物理可实现性,其中,要求$Q\left( {{s}} \right){G_{{n}}}^{ - 1}\left( {{s}} \right)$ 是正则的。文中采用一阶低通滤波器。滤波器参数如下所示。将模型方程写成零极点形式:
可以得出以下结果:
将
$Q\left( {{s}} \right)$ ,$Q\left( {{s}} \right){G_{{n}}}^{ - 1}\left( {{s}} \right)$ 以0.01 s采样周期进行双线性z变换结果为: -
内模控制是基于过程数学的控制器设计方法,该方法只有一个参数需要整定,具有良好的鲁棒性和抗干扰能力,并且输出超调很小[9-10]。控制框图如图8所示。图中
$R\left( {{s}} \right)$ 为温度设定值,$F\left( {{s}} \right)$ 为输出扰动,$T\left( {{s}} \right)$ 为测量温度值,${\hat G_{\rm{p}}}\left( {{s}} \right)$ 为名义模型,${G_{\rm{p}}}\left( {{s}} \right)$ 为实际被控对象,${G_C}\left( {{s}} \right)$ 为控制器[11]。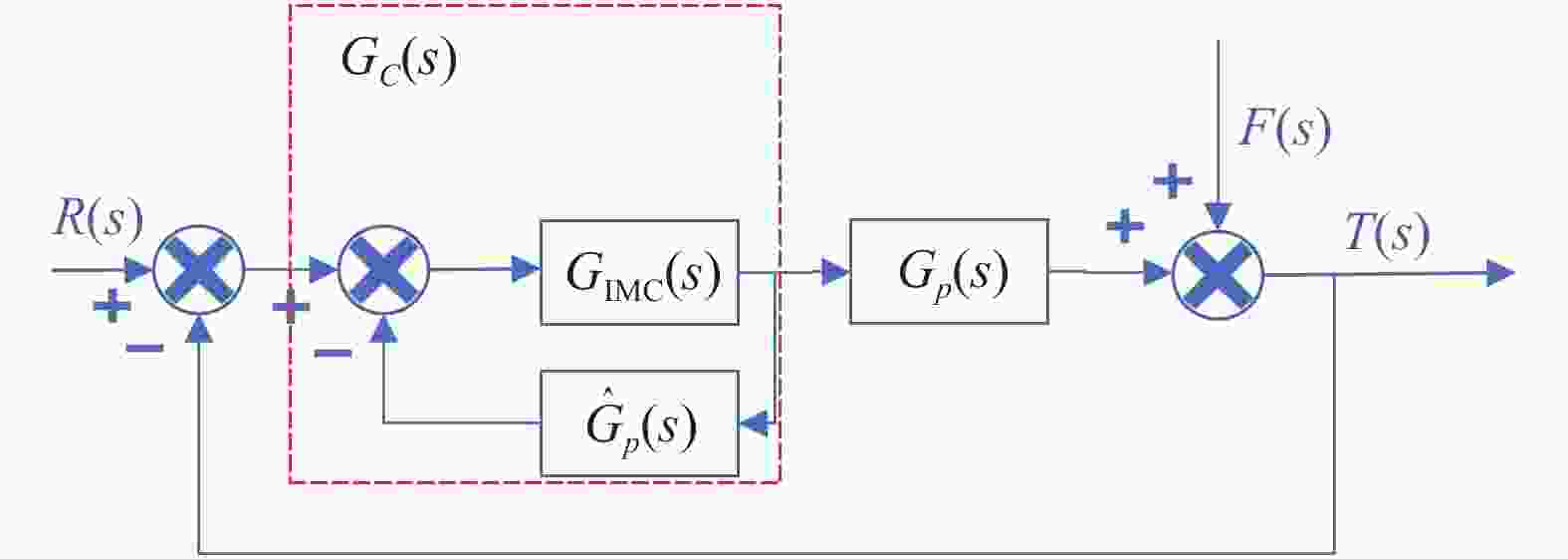
Figure 8. Equivalent block diagram of IMC
由于模型为最小相位系统,
文中IMC滤波器可由下式表示:
式中:
${T_f}$ 为IMC滤波器时间常数。因此,控制器
${G_C}\left( {\rm{s}} \right)$ 可由下式表示:可将该控制器看成一个PI控制器
${G_{c1}}$ 与另一部分${G_{c2}}$ 串联而成[12],针对文中对象控制器形式如下,式中$K$ 与${T_f}$ 有关,为需要整定的参数。将控制器
${G_{c2}}$ 以0.01 Hz离散化可得:综上所述,带干扰观测器的控制器的总输出量
$U\left( n \right)$ 为:式中:
${{{u}}_{{\rm{IMC}}}}\left( n \right)$ 为IMC控制器的输出量;$\hat d\left( n \right)$ 为干扰观测器的补偿量。 -
为了验证干扰观测器结合内模控制的有效性,用MATLAB的Simulink模块对干扰下的温度控制效果进行仿真。其仿真图如图9(a)所示。

Figure 9. Simulation of temperature control
仿真改变1 ℃的设定值,并叠加幅值大小为0.2,频率为1 Hz的正弦输入扰动,控制效果如图9(b)所示,扰动值与扰动的估计值如图9(c)所示。可以看出:带干扰观测的内模控制抑制外界干扰摄动的有效性。
-
实验环境选择在室温25 ℃左右的室内进行,负载完全暴露在空气中分别以PID控制与带干扰观测器的内模控制进行对比。其实验平台如10(a)所示。实验过程如下:首先,使用PID控制,将温度设置为70 ℃,等待稳定后,设定值改为71 ℃,等待稳定后将设定温度改为69 ℃。然后,使用带干扰观测器的内模控制,重复上述操作。将两组实验数据进行对比,结果如图10(b),10(c)所示。从图中可以看出:PID控制超调为0.3度,IMC+DOB控制方法几乎没有超调,达到最终稳态要比PID快。
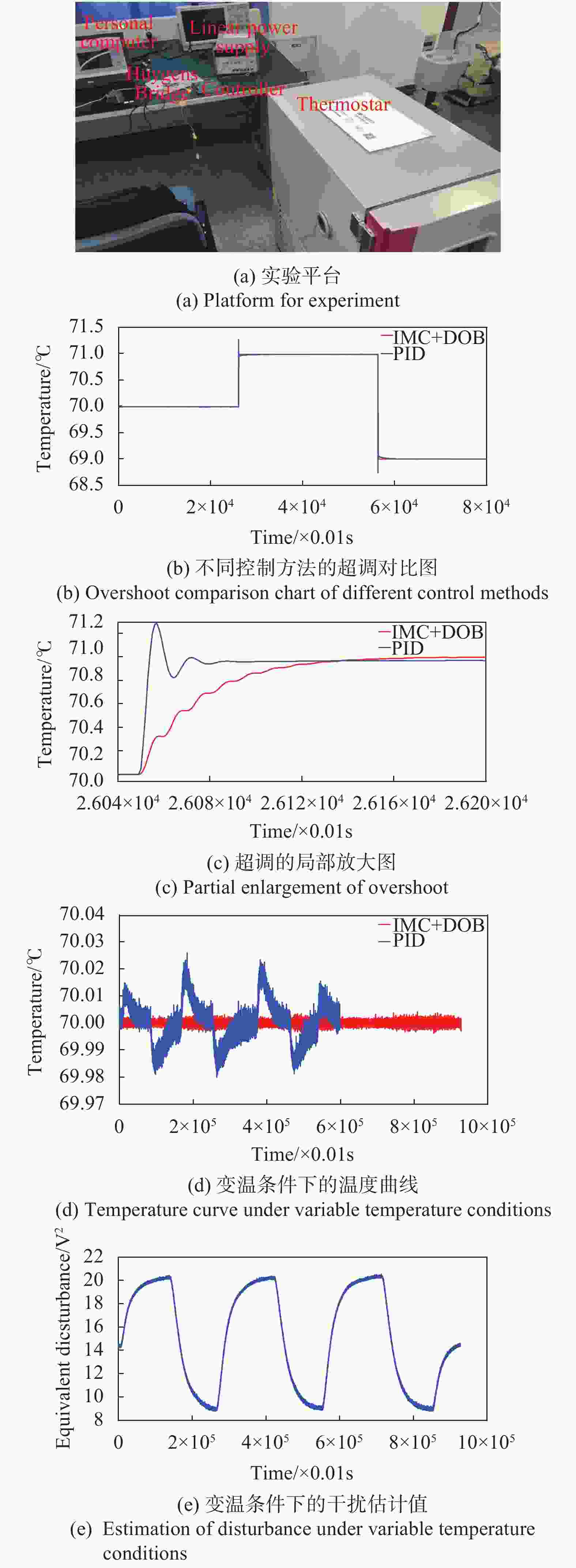

Figure 10. Experimental verification of IMC+DOB method
为验证干扰观测器的作用在上述PID参数不变的前提下进行变温实验,将负载放入温箱中,温箱由鼓风机传递热量,存在风扰。同时25 ℃的初始条件下以2 ℃/min的速度进行10 ℃的反复升降温。PID控制与IMC-DOB控制的效果如图10(d)所示,干扰观测器观测的输入等效干扰如图10(e)所示。可以看出在扰动下PID控制存在波动,精度可达±25 m℃。IMC+DOB控制效果稳定,精度可达±3m℃。
为测量常温下控制的稳定性与准确性选用Agilent3458A八位半万用表对温度以0.25 Hz的频率进行5 h的监测,被控点温度稳定度为±0.0015 ℃,如图10(f)所示。监测点峰峰值可达0.001 ℃,如图10(g)所示。但本身监测位置与被控位置存在梯度,由于环境温度变化,监测会产生漂移,5 h漂移量大约为0.002 ℃。
为验证SERF磁强计应用过程中的温度控制效果,在常温下对驱动光和检测光源进行1 h的测量,其驱动光的温度如图10(h)所示,检测光的温度如图10(i)所示。实验中驱动光温度设定为65.452 ℃,控制精度为±0.001 ℃。检测光设定为64.875 ℃,控制精度为±0.0015 ℃。
-
为改善SERF原子磁强计测量精度,提升VCSEL激光器在外界环境变化后的抗干扰能力。设计了半导体激光器交流温度驱动与检测的方法。该方案首先通过DPSD解调方法实现了温度解算,代替了传统模拟解调方式,降低了成本,提高了分辨率。然后通过递推最小二乘法实现系统辨识,建立了VCSEL激光器的温度控制模型,最后通过内模控制与干扰观测器的原理设计控制器,解决了激光器温度控制中超调问题和在环境温度变化等干扰下激光器温度不稳定问题。最终实验结果表明:VCSEL激光器在外界环境温度变化下,带干扰观测器的内模控制方法能有效地解决干扰下温度控制不稳定问题。最终温度控制精度可达到±3 m℃,常温条件下,5 h的温度稳定度可达到±1.5 m℃。证明了该检测方案与控制方法的可行性与有效性,为激光器稳定输出以及高精度磁探测奠定了基础。
Anti-interference temperature control for VCSEL laser
doi: 10.3788/IRLA20190461
- Received Date: 2019-11-15
- Rev Recd Date: 2019-12-20
- Available Online: 2020-07-23
- Publish Date: 2020-07-23
-
Key words:
- semiconductor laser /
- AC temperature control /
- disturbance observer /
- IMC control /
- DPSD
Abstract: Due to its low power consumption, small size, high modulation frequency and easy integration, VCSELs are widely used in the field of magnetic detection. As a high-precision sensor, the atomic magnetometer reduces the measurement accuracy due to the unstable output of the laser during the measurement of the magnetic field. A controller that can resist change in ambient temperature was designed to deal with the instability of the output of the laser due to environmental disturbance. Firstly, the high-resolution temperature solution was realized by the ADAU1401A chip with DSP core and DPSD method. Then the temperature control mathematical model was established by means of system identification. Finally, the disturbance observer and internal model control principle were applied to design anti-disturbance and low overshoot robust controller. The experimental results show that the control accuracy of interference is ±0.003 °C at 70 °C, and the control accuracy is ±0.001 5 °C at room temperature, which lays a foundation for stable output of laser and high-precision magnetic field measurement.





































































 DownLoad:
DownLoad: