






-
扫描镜机构作为光学遥感相机中的关键组件之一,通过扫描镜的往复运动实现运动补偿、大视场成像等功能,广泛应用于各领域的遥感卫星中[1-2]。目前工程上应用的扫描镜控制方法,以PID控制、前馈补偿等基于经典控制理论的算法为主[3-4],相关文献中也提出了基于H∞的鲁棒控制方法[5],但仅处于仿真阶段。
迭代学习控制[6-7](Iterative Learning Control,ILC)适用于具有重复运动性质的被控对象,广泛应用于注塑机[8]、机械臂[9]、航空航天[10]等运动控制领域,实现周期性轨迹的完全跟踪[11]或周期性干扰抑制[12]。文中针对枢轴支撑的扫描镜高阶被控对象,提出了一种基于迭代学习的扫描镜快速切换与轨迹跟踪控制方法,详细阐述了控制系统的组成、算法结构、迭代学习律的设计与优化过程。通过频域分析的方法,说明了算法的收敛性并选取了关键控制参数。然后通过仿真以及原理样机实测验证了算法的可行性。实测结果表明,该方法在系统带宽受限的情况下,无需精确辨识被控对象的高阶特性,即可有效提升扫描轨迹的跟踪精度,从而保证相机对目标的凝视成像效果。
-
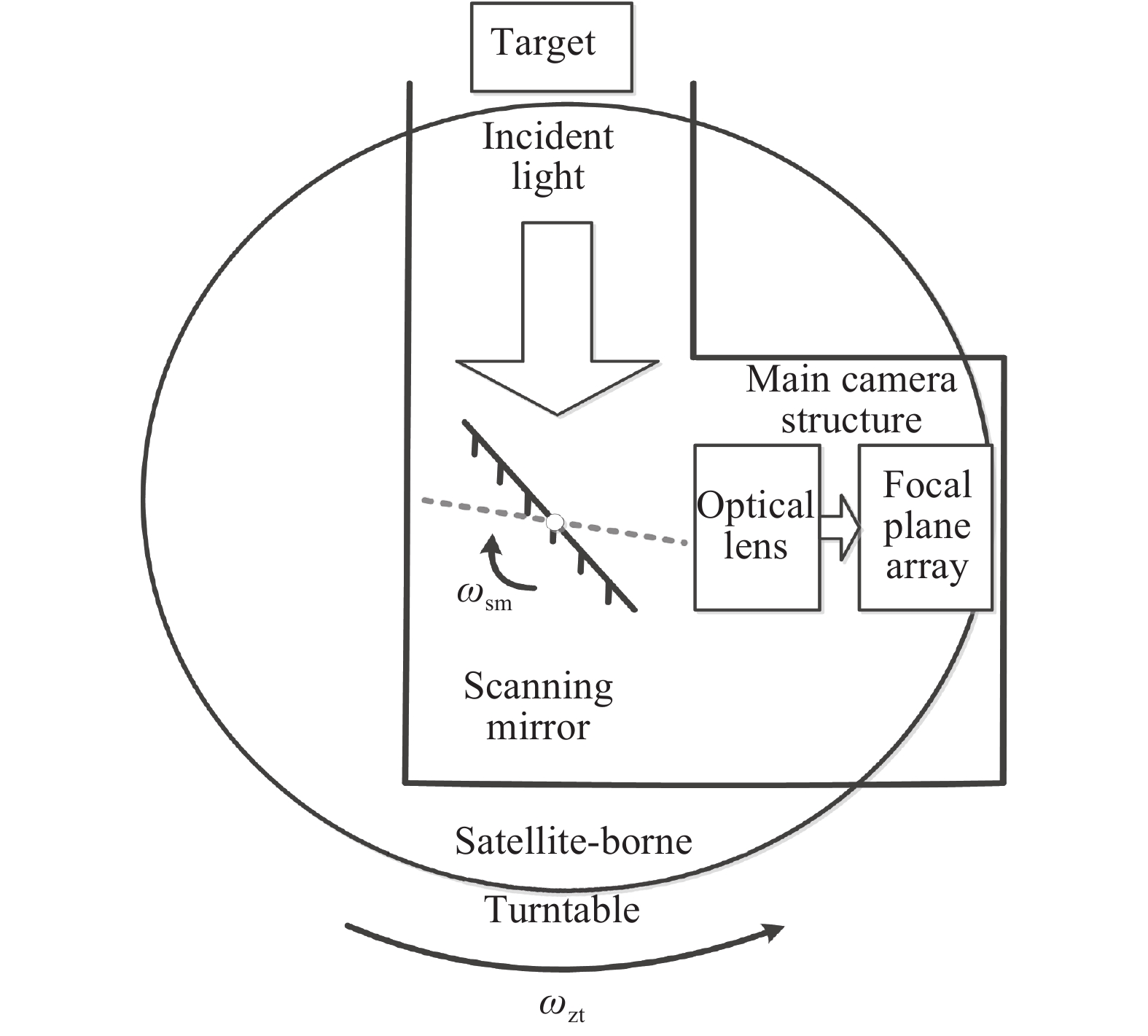
某星载广域红外相机的工作原理示意图如图1所示。其相机主体(包括扫描镜机构、光学镜头、面阵探测器等组件)安装于星载转台上,与星载转台一起以角速度ωzt匀速单方向360°连续旋转,实现广域观测功能。扫描镜的旋转轴与转台的旋转轴严格平行,在探测器的一次成像积分时间内,扫描镜以角速度ωsm=0.5ωzt旋转。扫描镜旋转方向与转台旋转方向相反,从而实现对观测目标的相移补偿,使相机实现在探测器积分时间内对观测目标的凝视成像。这种通过扫描镜补偿目标相移的面阵凝视成像方式具有探测器积分时间长、易实现高灵敏度探测等优点。
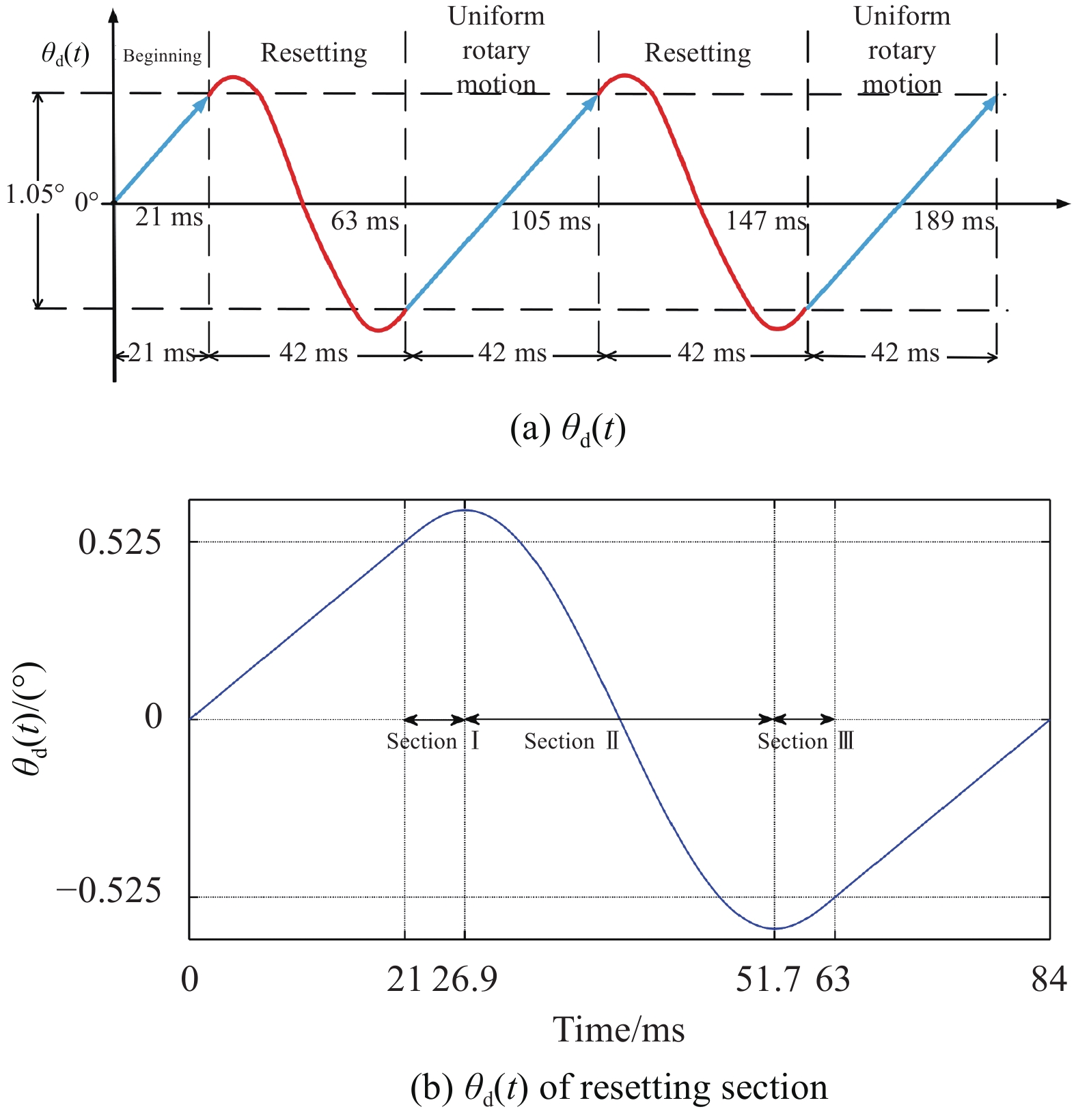
为了提高相机的观测效率,相机分系统要求扫描镜具备快速的角度位置切换复位能力,即扫描镜在探测器前一次积分时间结束后,需要快速切换到扫描运动的初始位置,并再次开始匀速扫描,使相机进行下一次曝光成像。扫描镜的期望运动轨迹θd(t)如图2所示。
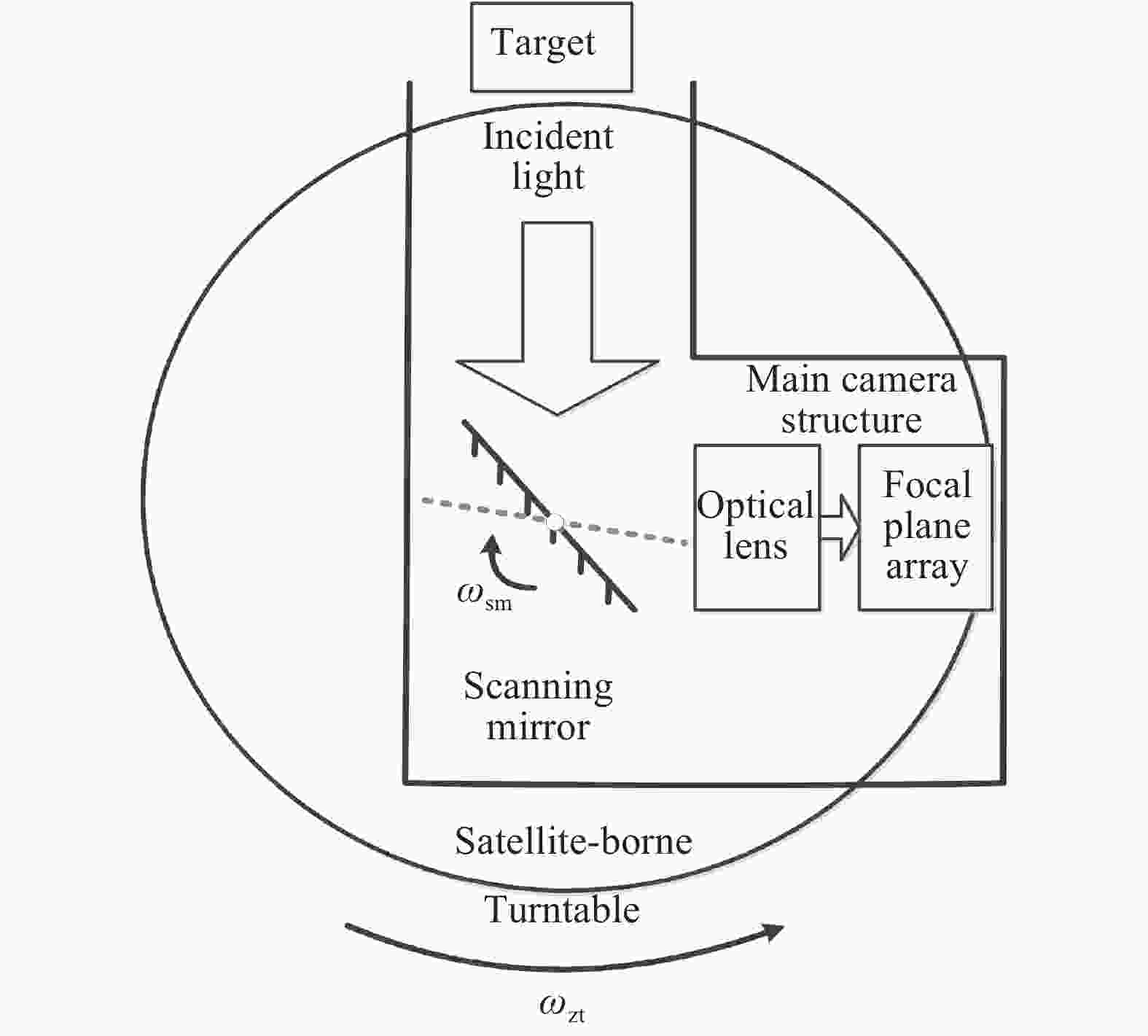
Figure 1. Schematic diagram of satellite-borne wide field infrared camera

Figure 2. Desired trajectory of scanning mirror
扫描镜的每个运动周期都分为匀速段与复位段两部分。根据相机使用需求,匀速段与复位段的时间皆为42 ms,每个运动周期合计为84 ms,频率约11.9 Hz。匀速段对应相机成像曝光时段,扫描速度ωsm=25 (°)/s,扫描镜在匀速段的摆角范围为1.05°。为了保证目标的凝视成像效果,要求星载转台与扫描镜都必须具有较高的控制精度,确保两者在匀速段内的二倍角关系。系统要求扫描镜在匀速段内的位置跟踪精度达到角秒级。在复位段内,系统对扫描镜没有跟踪精度要求,但是在复位段结束、下个匀速段开始的时刻,要求扫描镜的跟踪误差已稳定到角秒级。如图2(b)所示,扫描镜要在42 ms内依次完成减速停止,从一端切换到另一端,然后再加速到ωsm共三个步骤。对基于经典控制理论的闭环系统设计而言,极短的切换及稳定时间必然要求较高的控制系统带宽。目前遇到的问题是,为了提高控制带宽,系统要满足多个前提条件,包括扫描镜机构(含扫描镜)须具备足够高的扭转刚度;控制器须具备较强的实时计算能力保证与带宽匹配的高采样/控制频率;测量元件须具有足够低的测量噪声与时间延迟等,这些硬件条件都极大地增加了工程实现的难度与成本。
-
控制系统由扫描镜机构与电子学控制器组成,如图3所示。
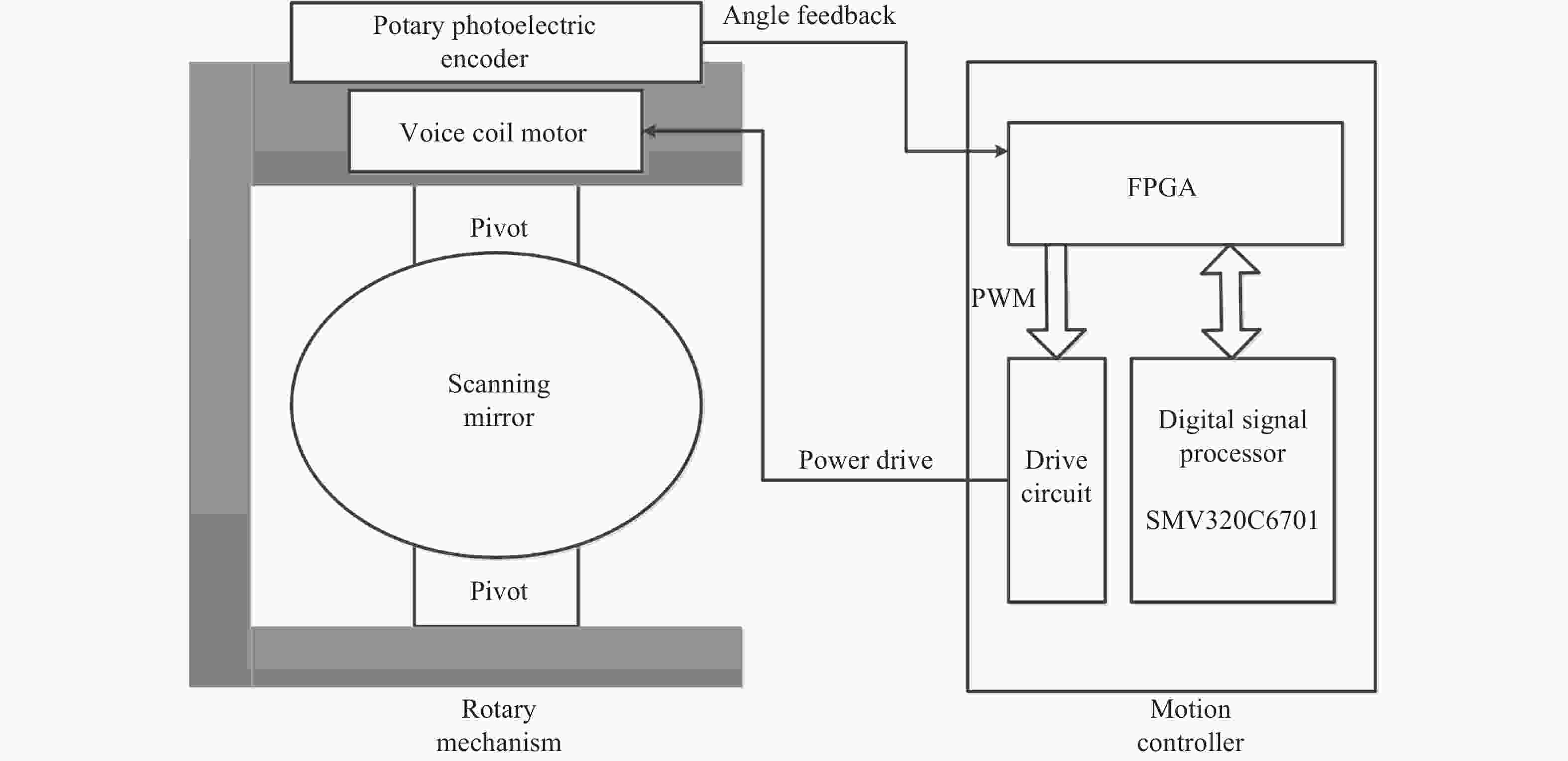
Figure 3. Composition of scanning mirror control system
原理样机机构中的光学扫描镜采用SiC镜坯,尺寸为181 mm×120 mm,质量约0.57 kg,绕旋转轴的转动惯量约为1.2×10−3 kg·m2。
根据扫描镜往复摆动的运动方式,1°左右的摆角范围,以及高达109的摆动次数要求,扫描镜机构采用挠性枢轴支撑,音圈电机驱动的方案。角度反馈元件选用高精度光电码盘,分辨率可达26 bit及以上,从而实现角秒级的控制精度。
电子学控制器主要由控制电路与驱动电路组成。控制电路的核心器件为高性能浮点型数字信号处理器SMV320C6701(简称C6701)与FPGA。C6701通过32 bit的外部存储总线接口(External Memory Interface,EMIF)与SRAM、PROM、MRAM及FPGA相连,并通过不同的使能信号(CE0~CE3)将其配置在不同的外部存储空间,其中SRAM用来存储C6701计算过程中产生的临时数据,MRAM则作为非易失性存储器保存需要重复使用的数据,PROM用来实现程序的固化。伺服过程中,FPGA接收并解析来自光电码盘的角度位置信号。C6701以0.1 ms的采样/控制周期从FPGA中读取当前角度位置,再根据扫描镜的期望轨迹与控制算法实时计算产生音圈电机的驱动电压值并发送给FPGA,FPGA产生相应的PWM波形发送给驱动电路。驱动电路由MOSFET管组成H桥电路,实现音圈电机的双极性驱动。
闭环控制所需的角度指令,即图2中的扫描镜期望运动轨迹θd(t)由C6701按0.1 ms的控制周期实时计算生成。为使切换复位过程尽可能平滑,复位段的位置指令由3段正余弦信号拼接而成,总时间为42 ms,如图2(b)所示。图中第I段与第III段为1/4周期的正弦信号,分别对应扫描镜的减速过程与加速过程。第II段为1/2周期的余弦信号,对应扫描镜的角度切换过程。以角加速度(角速度的导数)最小为目标,经计算可得,第I段与第III段的持续时间约为5.9 ms,对应的正弦信号频率约为42 Hz。第II段的持续时间约为30.2 ms,对应的余弦信号频率约为16.5 Hz。尽管角度指令已进行了平滑处理,但复位段轨迹的最大角加速度依然高达6677 (°)/s2,最大角加加速度(角加速度的导数)达到1.78×106 (°)/s3。
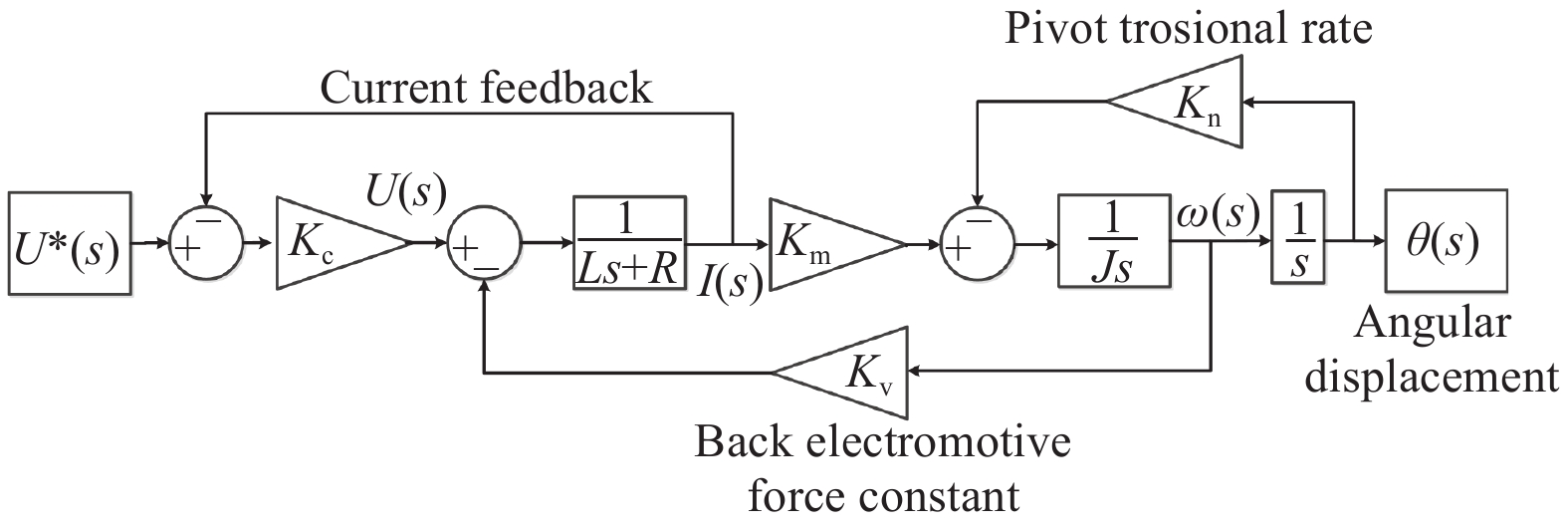
扫描镜机构作为被控对象,其特点是枢轴支撑,音圈电机驱动。枢轴支撑的摩擦极小可忽略不计,则被控对象的动力学模型用微分方程组表达,如公式(1)所示:
式中:θ(t)为t时刻扫描镜角度;ω(t)为角速度;u(t)为音圈电机绕组两端驱动电压;i(t)为绕组电流。测试用的原理样机的参数包括:音圈电机绕组电阻R=4.5 Ω,绕组电感L=4.3 mH,电流力矩系数Km=0.26 Nm/A,反电势系数Kv=0.26 V/rad·s-1,枢轴扭转刚度(两个共计)Kn=0.382 Nm/rad,电机总负载惯量(含扫描镜,码盘等) J=5×10−3 kg·m2。
音圈电机驱动电压U(s)至扫描镜角度θ(s)的传递函数记为Gp(s),如公式(2)所示:
由公式(2)可知,由于枢轴挠性支撑的影响,扫描镜机构为三阶被控对象,并且存在谐振点。因此在基于经典控制理论的闭环算法设计中,首先采用了基于角度位置与角速度的次环反馈来增加系统阻尼,消除谐振点。同时,为减小稳态误差,提高系统型别,在前向通道中采用比例-积分控制器。位置闭环控制算法的结构图如图4(a)所示。其中,Ka、Ks分别为次环反馈中的位置增益与速度增益系数;KP、KI分别为比例与积分控制器系数。扫描镜机构没有安装测速元件,因此速度信号由角度位置经数字差分与低通滤波后得到。受量化影响,数字差分会给速度信号带来较大的噪声,因此机构选用的光电码盘应具有足够高角度测量分辨率,使噪声降低到可接受的程度。
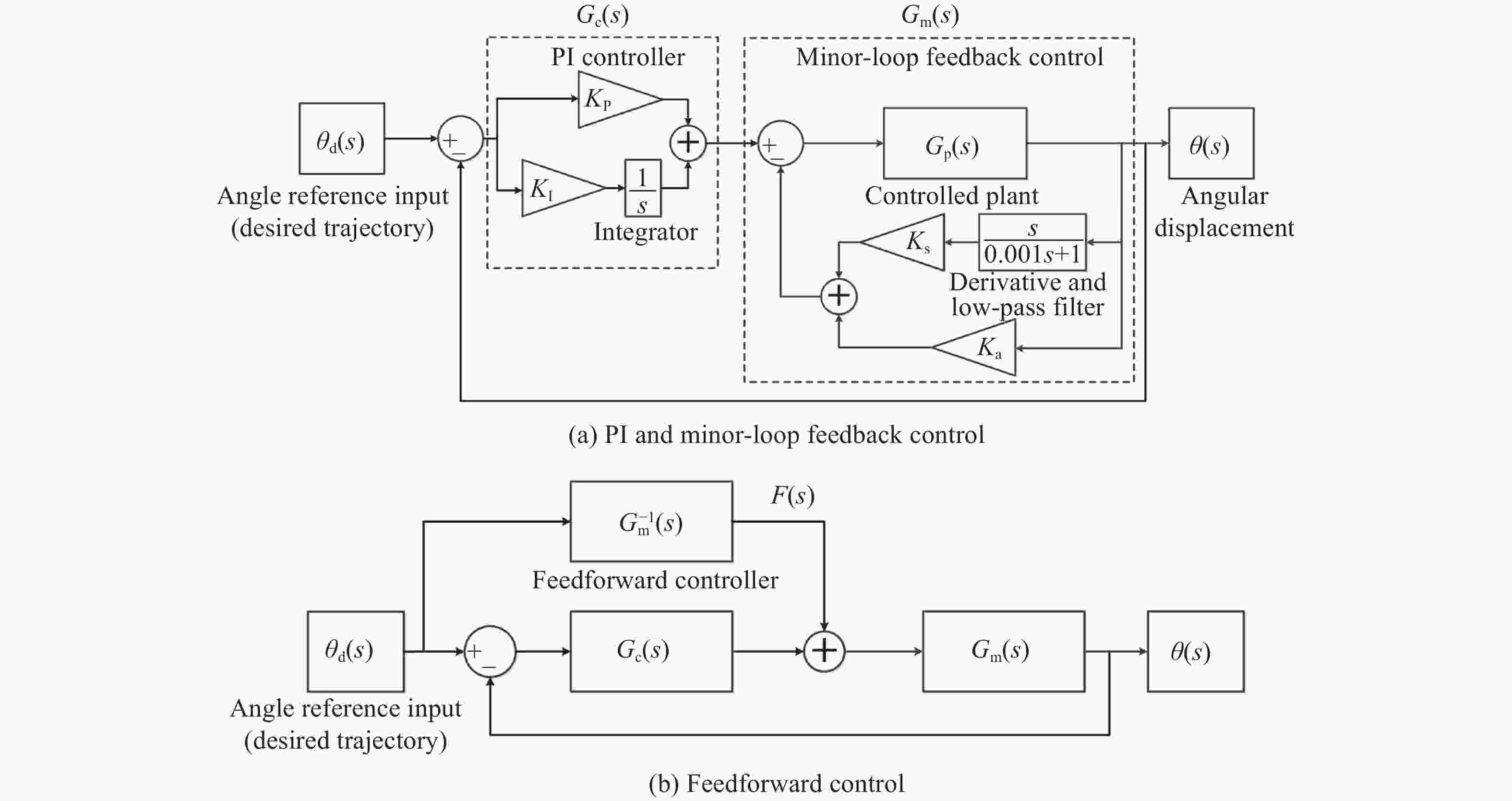
Figure 4. Block diagram of closed-loop system based on classical control theory
记PI控制器的传递函数为Gc(s),次环反馈闭环后的被控对象记为Gm(s),为方便后文描述,将Gm(s)写成如下形式(忽略速度低通滤波产生的高阶项):
当Ka>>KnR/Km,Ks>>(KnL+KmKv)/Km时,可得C0≈Ka,C1≈Ks。
按照图2的期望轨迹与图4(a)的控制系统设计闭环算法,若要实现复位段快速切换稳定并满足匀速段角秒级的跟踪误差,经仿真,系统闭环带宽须达到百赫兹以上,工程实现代价极大。
对于周期性往复运动的控制系统,前馈控制可以在不提高系统带宽的前提下有效提高控制精度[13]。前馈控制结构图如图4(b)所示。
理论上,如果设计的前馈控制器能完全实现Gm−1(s)的频率特性,则系统能实现对输入轨迹的完全跟踪。由公式(3)可知,对于枢轴支撑的高阶被控对象,系统需要精确辨识C0~C3这四个系数,然后分别与角度指令、角速度指令、角加速度指令以及角加加速度指令相乘,才能实现Gm−1(s)。图2(b)所示的期望轨迹的角加加速度达到了106 (°)/s3的量级,因此前馈控制器的输出(图4(b)中的F(s))对高阶系数C3极为敏感。在实际工程中,由于难以准确地辨识被控对象的高阶特性,无法实现理想的前馈控制。通过原理样机实测,在闭环带宽有限的情况下,基于固定系数的前馈控制只能实现百角秒左右的跟踪精度。文中提出的基于迭代学习算法的轨迹跟踪控制,本质上也是一种前馈控制方法,其区别在于控制量F(s)不是固定的,而是根据误差信号不断迭代修正得到的,因此不需要精确辨识被控对象的动力学特性,是一种智能控制[6]。
-
基于迭代学习算法的控制器结构如图5所示。图中,Fj(s)为第j次迭代时产生的控制量fj(t)的拉普拉斯变换。Ej(s)为第j次迭代时,期望轨迹与系统输出之间的误差。ILC的目标是通过多次重复运行与迭代后,使fj(t)逼近理想的控制量fd(t)。在fd(t)的作用下,可使得系统输出θ(t)=θd(t),e(t)=0,即实现期望轨迹的完全跟踪。

Figure 5. Block diagram of control system based on ILC
L(s)为需要进行设计的迭代学习律,常见的学习律类型包括D型、P型、PD型。预测型迭代学习控制[14-15](Anticipatory Iterative Learning Control)的原理是基于控制量fj(t)在t时刻对系统产生的影响,会经系统延迟后体现在t+Δ时刻的系统输出上。因此在预测型ILC中,用j−1次迭代时,t+Δ时刻的误差ej−1(t+Δ)来修正j次迭代中t时刻的控制量fj(t),取得了较好的控制效果。控制量迭代过程的时域表达式为:
对于图5所示系统,可得到如下关系式:
由公式(5)~(9)可得:
易知,若将迭代学习律L(s)设计为:
则Ej(s)=Ej−1(s)×0,即误差会在一次迭代后变为0,实现完全跟踪。但是实际被控对象的C0~C3无法精确辨识,并且公式(11)中的前三项s3、s2、s分别对应系统的角加加速度误差、角加速度误差与角速度误差,控制器无法直接测量。如果通过差分计算误差的高阶导数会引入极大的噪声,一般无法在工程上实施。为此,文中进行了如下的工程优化设计:
(1)用Ka代替C0,用Ks代替C1。如上文所述,当Ka与Ks的值较大时,C0≈Ka,C1≈Ks。
(2)由角度位置误差E(s)通过数字差分与低通滤波的方式,计算得到速度误差
$\dfrac{s}{0.001s+1}E\left(s\right)$ 。(3)根据预测型ILC的原理,利用速度误差在t+Δ时刻的值去近似t时刻的加加速度误差与加速度误差,即代替公式(11)中的C3s3+ C2s2+C1s,从而避免误差高阶导数的计算与噪声的引入。
t+Δ的s域表达式为eΔs,则公式(11)学习律的优化设计结果为:
优化后的学习律中只有一个参数待定,即预测型ILC算法中的误差超前时间Δ,易于工程实现。下文说明如何通过频域分析的方法选取参数Δ。
-
首先,按照图4(a)中的控制器结构设计一组闭环参数,使闭环系统稳定。系统的前向通道增益不宜太高,避免电机从静止到启动运行时闭环系统产生较大振荡,影响后续迭代效果。但同时闭环算法要保证扫描镜每一次摆动之前都能稳定伺服到同一初始位置(即0°),从而满足迭代学习的初始状态要求。在弧度单位制下,设计的闭环控制参数为Ka=200,Ks=20,KP=50,KI=2 000。此时系统开环穿越频率为1.26 Hz,相角裕度为62°,系统稳定,闭环带宽1.84 Hz。
由公式(10)可知,基于迭代学习算法的系统跟踪误差的频域收敛条件可表示为[15]:
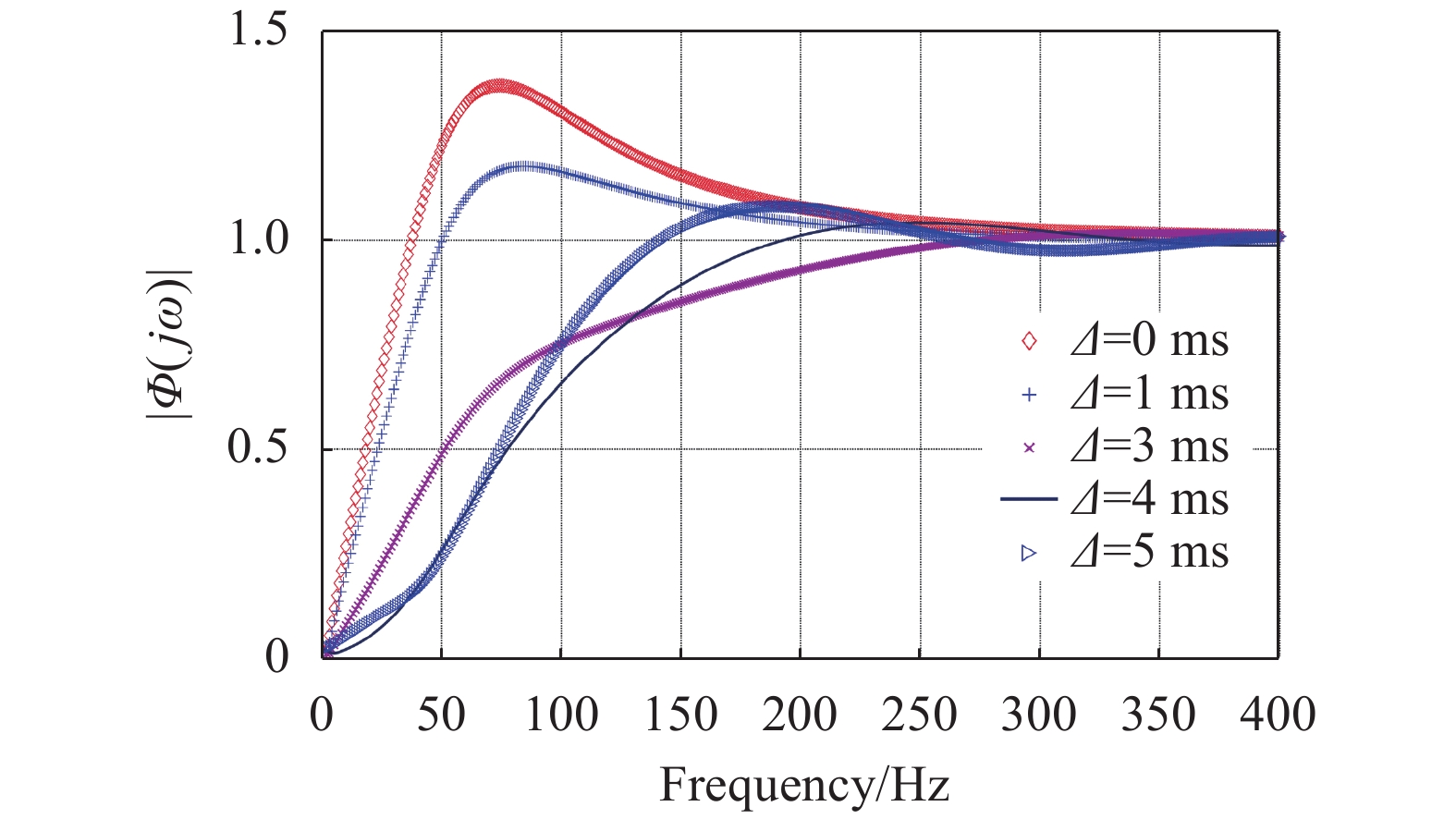
将公式(12)代入,得到不同Δ下|Φ(jω)|如图6所示。

Figure 6. Diagram of |Φ(jω)| with different lead-time Δ
当Δ=0 ms,即没有超前时间时,预测型ILC退化为PD型ILC。由图6可知,相比PD型ILC,预测型可以有效提高误差收敛的频率范围以及误差衰减速度。
根据|Φ(jω)|选取参数Δ时,首先考虑误差收敛的频率范围。迭代过程中,满足|Φ(jω)|<1频率范围内的误差信号会持续衰减,反之则会持续增大。取Δ=3 ms时,误差收敛的频率范围约为270 Hz,超出部分的|Φ(jω)|最大值为1.018;Δ=4 ms时,约为190 Hz,超出部分最大值为1.042;Δ=5 ms时,约为140 Hz,超出部分最大值为1.08。然后考虑低频段内的误差衰减速度,由上文分析可知,期望轨迹的频率主要包括11.9 Hz、16.5 Hz和42 Hz,因此主要考虑50 Hz以内的误差衰减情况。当频率为50 Hz时,若Δ=3 ms,|Φ(jω)|=0.49;Δ=4 ms,|Φ(jω)|=0.258;Δ=5 ms,|Φ(jω)|=0.243。综合考虑,选取Δ=4 ms作为学习律的误差超前时间,此时对50 Hz以下的误差信号,在第五次迭代时便可衰减至初始值的1‰左右,而高频误差只放大1.2倍。对收敛频率范围以外的误差信号,文献中一般采取“频率截断”[15]或低通滤波的处理方式实现全频率范围内的误差收敛。工程上也可采用设置误差门限的方式,即当低频误差已衰减至很小,而高频误差开始显著增加时,停止继续迭代,保持当前的控制量fj(t)。
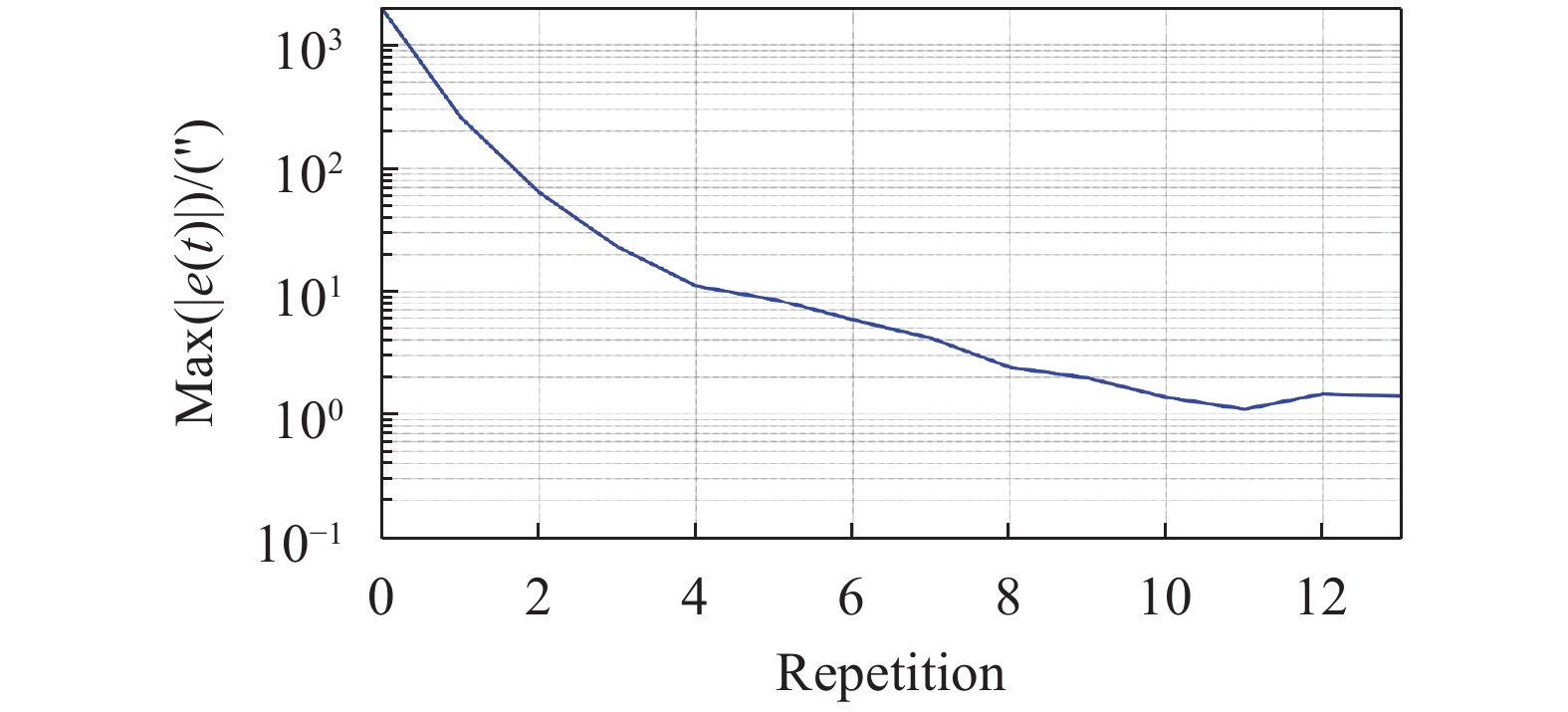
取Δ=4 ms,通过Simulink仿真得到随着迭代次数增加,稳态时,扫描镜在匀速段内跟踪误差绝对值的最大值max(|e(t)|),如图7所示。
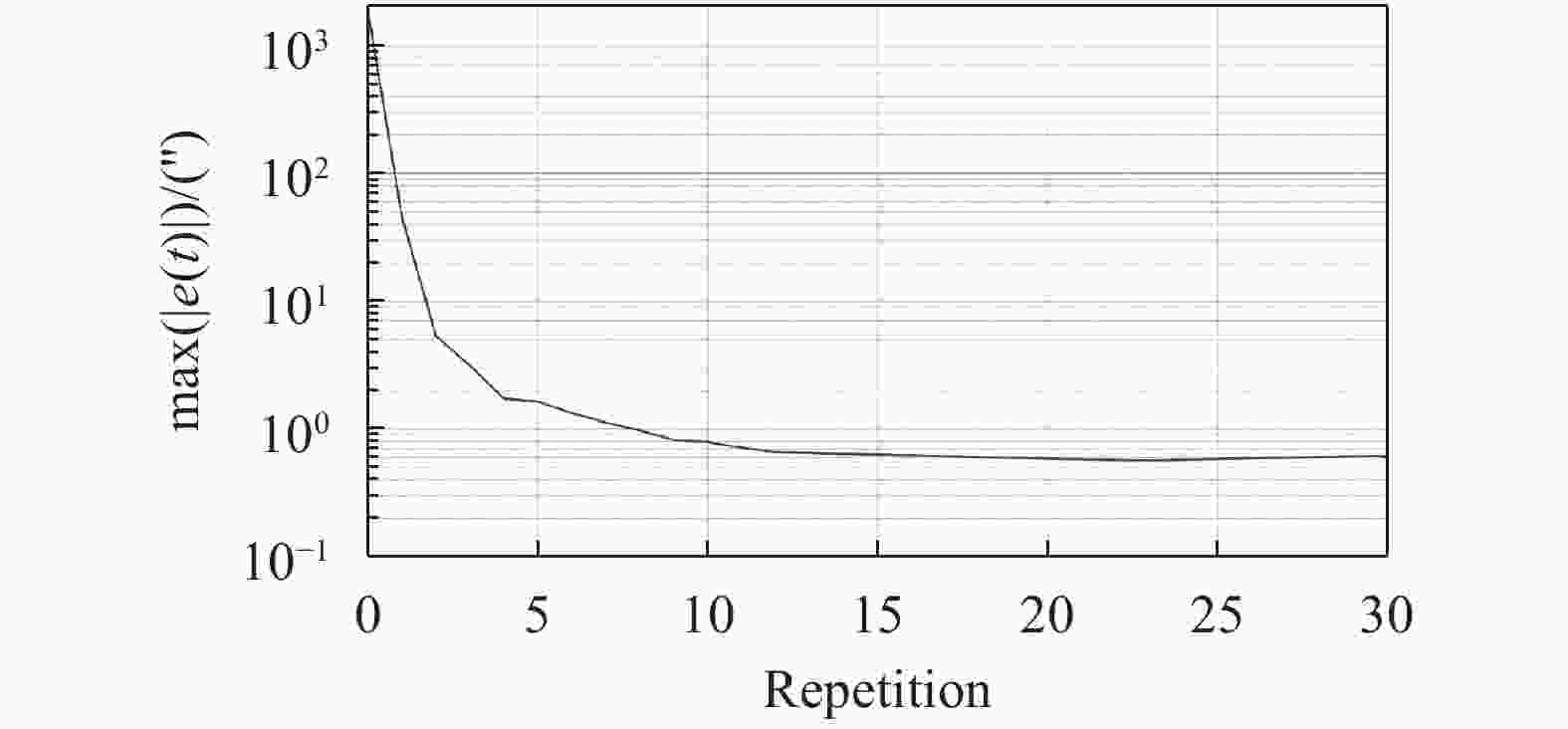
Figure 7. Diagram of max(|e(t)|) with different repetitions
仿真结果中,在迭代的前10次,匀速段内角度跟踪误差max(|e(t)|)迅速衰减至约0.8″,此后误差衰减速度放缓,至第23次时达到最小值0.57″,然后误差开始缓慢增大,第30次时增至0.62″并继续增大。其原因为迭代前期误差信号中的低频分量迅速衰减,max(|e(t)|)减小,但高频误差持续放大,使得进入迭代后期时,max(|e(t)|)开始增大。仿真结果与理论分析一致。实际应用中,可在迭代次数10次左右时停止迭代,以防止高频误差持续增大最终导致系统发散。
为了验证算法对误差超前时间Δ的敏感程度,文中还对第10次迭代时不同Δ下的max(|e(t)|)进行了仿真,其中Δ的取值范围为2.5~5 ms。仿真结果表明,当Δ在2.9~4.4 ms范围时,迭代学习算法皆可以在第10次迭代时使max(|e(t)|)衰减到1″以下,说明算法具备一定的鲁棒性与工程可行性。
-
对于迭代学习而言,被控对象Gp(s)的稳定性关系到误差的最终收敛效果。对于扫描镜机构,在音圈电机电阻R、电感L、电流力矩系数Km等几个被控对象参数中,电阻R的大小对温度的变化最为敏感。尤其是当机构工作在真空环境时,音圈电机散热困难,长时间工作可能产生较大的温升。若考虑极端工作情况,假设绕组持续发热直到达到系统热平衡状态之前,绕组产生100 ℃的温升,则电阻R会增大至开始时的1.4倍左右。此时,被控对象Gp(s)的变化会对迭代学习算法的误差收敛效果产生较大的影响。
为解决这个问题,一方面在实际工程应用中,会采取机构控温,选用热耗小的电机等措施控制电机绕组的温升;另一方面,可采取电流闭环的控制策略,减小被控对象特性对电阻R的敏感程度。加入电流闭环后的被控对象结构如图8所示。

Figure 8. Block diagram of controlled plant with current feedback
图中,Kc为电流闭环控制器增益系数,电流闭环控制器采用比例型控制器即可。加入电流闭环后的被控对象G*p(s)如公式(14)所示:
易知,当Kc>>R时,音圈电机绕组R的变化(最大1.4倍)不会使被控对象G*p(s)的特性产生较大的改变,即不会影响到迭代学习算法的误差收敛效果。
取Kc=100,其他控制参数不变,按上文的频域分析方法选择Δ=1.5 ms,再次进行仿真。仿真结果表明,即使在音圈电机温升较大的情况下(比如热平衡前,每次迭代时绕组增加10 ℃温升),迭代学习仍然能使跟踪误差收敛到1″左右,满足使用要求。
-
为了验证控制算法的可行性,在图3与图9所示的扫描镜机构原理样机控制系统中进行了轨迹跟踪误差测试。

Figure 9. Scanning mirror prototype (a) and trajectory tracking error test (b)
测试过程中,将扫描镜机构放置于星载红外相机地面测试用的光学平台上,并远离测试设备,如大功率电源的风扇等振动干扰源。
每次迭代学习开始前,先通过闭环控制使扫描镜伺服到0°,然后对图2所示的期望角度轨迹进行跟踪与迭代学习控制。每次迭代运行后的误差值及控制量存储于控制电路的SRAM中,用于下次控制量的迭代计算。多次迭代后的控制量可写入MRAM中,在控制器重新上电后仍可继续使用。不同迭代次数下扫描镜在匀速段内的max(|e(t)|)测试结果如图10所示。
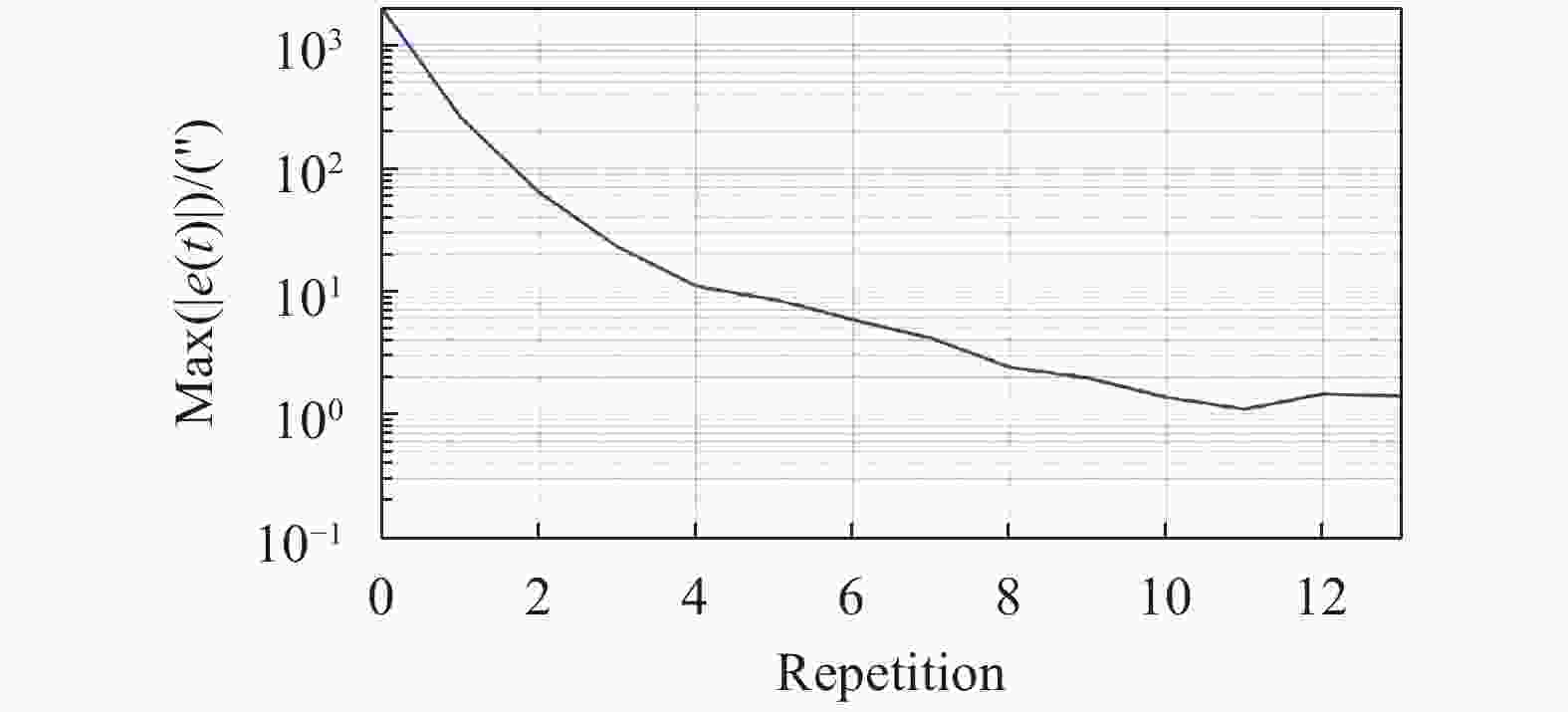
Figure 10. Trajectory tracking error test results of scanning mirror prototype
经后仿真分析,由于设计阶段仿真中使用的被控对象参数(尤其是负载总惯量J)与原理样机机构实际的参数存在一定的差异,图10中实测扫描轨迹跟踪误差的收敛速度与仿真中相比较为缓慢,但跟踪误差最终仍然达到了角秒级,在第11次迭代时达到极小值,为1.1″,与上文仿真结果0.8″已经非常接近。后续迭代中高频误差增加,使得max(|e(t)|)增至1.4″左右。经多次反复测试,基于原理样机的算法测试结果总结为经10次迭代后,跟踪误差优于±1.5″。第10次迭代时的扫描镜期望轨迹θd(t)、跟踪误差e(t)及e(t)在±5″区间的局部放大图如图11所示。图中,扫描镜启动后经过约1 s的时间进入稳态,稳态时跟踪误差优于±1.5″。满足原理样机阶段的红外相机对扫描机构的性能要求。
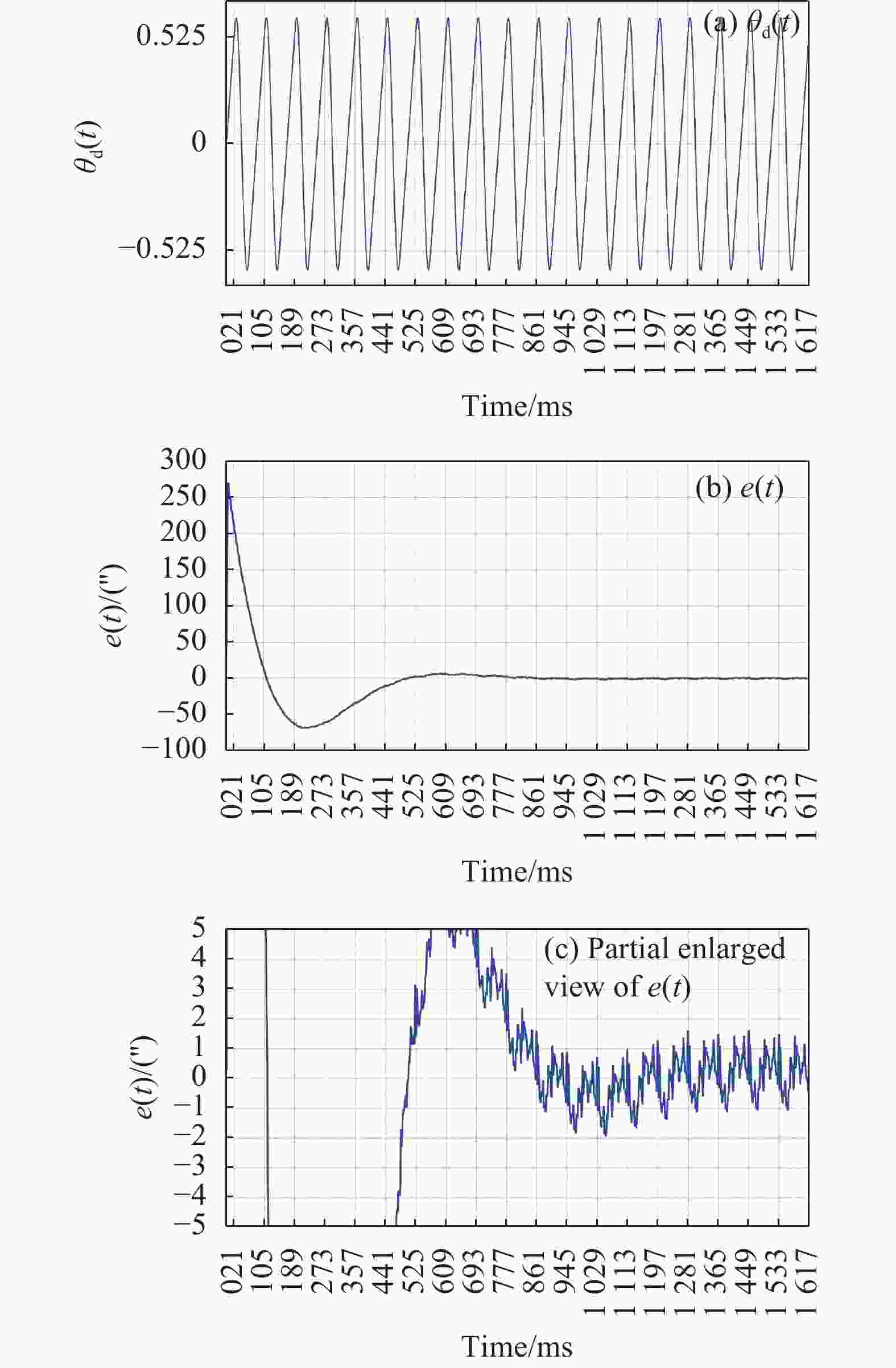
Figure 11. Trajectory tracking error test results of scanning mirror prototype on 10th repetition
-
文中针对星载广域红外相机中基于枢轴支撑的高阶扫描镜机构控制系统,设计了基于迭代学习的轨迹跟踪控制方法,并采用“预测型”算法优化了迭代学习律,避免了误差的高阶导数计算,使其易于工程实现。然后通过频域分析的方式说明了算法的收敛性,选取了关键控制参数。通过Simulink仿真与原理样机实测,验证了算法的效果与可行性。实测结果表明,算法可在闭环带宽低于2 Hz的情况下,无需精确辨识被控对象的高阶特性,即可实现扫描镜对角加加速度超过106 (°)/s3的期望轨迹的高精度跟踪控制,跟踪误差优于±1.5″。所提出的扫描镜控制方法可在不增加系统工程实现成本的情况下有效的提升轨迹跟踪精度,实现快速角度切换,为具有类似的周期特性星载扫描镜控制系统设计提供借鉴。
Trajectory tracking control for scanning mirror of infrared camera based on iterative learning algorithm
doi: 10.3788/IRLA20200257
- Received Date: 2020-06-24
- Rev Recd Date: 2020-08-11
- Available Online: 2021-05-12
- Publish Date: 2021-03-15
-
Key words:
- scanning mirror control system /
- trajectory tracking /
- iterative learning control /
- anticipatory learning scheme
Abstract: In order to improve the efficiency of observation and the quality of staring imaging, satellite-borne wide field infrared camera has a strict requirement on the scanning mirror control system. The scanning mirror is required to achieve fast steering in tens of milliseconds and trajectory tracking with arc second level control precision. Due to the limit of control system bandwidth, the motion performances are difficult to realize by algorithm based on classical control theory. For the scanning mirror with pivot supporting, a trajectory tracking control method for high order controlled plant based on iterative learning algorithm was proposed. The design and optimization process of learning law was given. By using anticipatory learning scheme, the calculations of high order derivatives for tracking error were avoided. Furthermore, the convergence condition and the key parameter of control algorithm were derived by frequency domain analysis. Its application effect was verified by both simulation and prototype test. The prototype test results show that, in the scanning mirror closed-loop control system with less than 2 Hz bandwidth and no identification for high order characteristics of the controlled plant, the tracking error of a desired trajectory with above 106 (°)/s3 angular jerk is reduced to ±1.5" after adopting the iterative learning algorithm, which meets the performance requirements of infrared camera system.








 DownLoad:
DownLoad: