






-
微创手术以其创口小、恢复快以及术后发病率低等优点已经成为未来手术领域的主要发展方向之一[1-3]。相比目前进行微创手术的刚性手术机器人,软体手术机器人由于自由度高,柔韧性好,适应性强等优点[4-5]开始逐步的应用于医疗器械领域[6-7]。在微创手术的过程中,操作器末端受力发挥着重要的作用,可以为医生提供操作位置的受力信息,防止医生用力过度对正常组织造成损害,确保了手术的安全性和可靠性。为了实现微创手术操作器的末端力测量,国内外不同机构也做了许多的研究。
美国斯坦福大学的Zhang[8]等设计了由两个等周期相位的光纤光栅传感器组成的细胞力探针力传感系统,利用双透射相位光栅的衍射特性测量探针操作时的穿透力。比利时鲁汶大学的Peirs[9]等人将光纤传感器安装在腹腔手术操作器末端,通过光纤光栅反射信号的强度测量手术操作器两部分的相对位移,根据相对位置变化测量得到手术操作器末端三维力;美国俄克拉荷马大学Yokoyama[10]等人将三根布拉格光栅以120°布设在手术消融弹性装置中,根据光纤光栅反射波长的变化来计算得到弹性体末端的三维力;美国哈佛大学Shelten G.Yuen[11]等人提出心脏消融手术超声引导运动力反馈系统,根据光强反射式原理,通过监测布设于导管的两根光纤传感器的光强变化进而建立求解末端力;美国约翰霍普金斯大学的He[12]等人研究的用于眼科视网膜微创手术的三自由度力传感器,通过四个光纤光栅传感器的波长漂移量来传感测量操作器末端的三维力;瑞士伯尼尔大学的Bell[13]等人设计的用于镫骨切除术的光纤布拉格光栅力传感微型手术钳,通过手术操作手握力与钳口力以及布拉格光纤光栅传感参数之间的关系,来传感测量得到手术钳操作时的末端力;美国圣尤达公司研发的基于光纤光栅的接触力反馈系统,利用光干涉原理,通过布设光纤的光干涉来判断接触点形变特征,进而判断所受外力的大小和方向。意大利的Thomas George Thuruthel[14]等人通过将嵌入式软电阻传感器植入到软体机器人并结合递归神经网络来分析构建软体机器人运动学和力学模型使得软体机器人可以感知外部物体相互作用时估计所施加的力。中国的Yang和Chen[15]等人用金属钌、二氧化钌等导电金属与甲基乙烯基硅橡胶等柔性材料按特定比例混合后,所得到的导电橡胶呈现良好的压敏特性,通过将这种材料嵌入到软手指中,根据其中的压阻弹性体可以实现对软手指的压力以及位置的传感。美国的Lucarotti[16]等证明了传感对可以紧密跟随弯曲的软模块的运动,将电容传感器布设在软体操作器连结处,利用电容式传感原理可以用于区分弯曲曲率和接触压力。然而现有研究大多数都是对刚体手术机器人的末端力进行传感测量,软体机器人在运动过程中因为软体材料的非线性特性,导致测量误差增大,所以现有的测量方法不能很好的消除软体材料所导致的测量误差,而现有对软体机器人力感知的方法大部分采用的是电子传感器,不能很好的适用于电磁环境复杂的手术环境,缺少对软体机器人末端力测量和传感的方法。
针对以上研究存在的问题,文中提出一种基于光纤光栅的软体机器人末端力解耦方法,实现软体机器人的末端力精确测量。首先将三根光纤光栅植入到软体机器人中,其次推导光纤光栅在此布局方法下的中心波长漂移量与软体机器人末端力之间的关系,建立光纤光栅软体操作器末端力传感模型,最后采用基于最小二乘法线性回归和二阶伯恩斯坦多项式计算方法,对光纤光栅测量软体操作器末端力进行了线性标定以及非线性补偿,从而实现了软体机器人末端三维力的测量。并通过对比实验测试分析文中所提出软体机器人末端力解耦算法的有效性。
-
力传感器位于软体操作器末端来感知接触力,当操作器作用到人体组织时,力传感器应该具有包括横向力和轴向力的三维感知能力,微创手术创口疤痕根据手术的不同大多在20~30 mm之间,而受力极限则以视网膜手术为例,视网膜需要非常精细的运动,才能在小而受限的眼睛工作空间中对精细的组织进行精确的操作,Gupta等[17]人研究了猪尸体眼睛体外视网膜操作过程中施加的力。在所有测得的力中,约75%小于7.5 mN,只有19%的这种力量级的事件能被外科医生感觉到。为了满足测量需求,给出了集成力传感器的软体操作器的尺寸、量程以及精度要求,具体要求如表1所示。
Size Degree of freedom Range Precision Diameter not
exceeding 20 mmThe three dimensional force is
in the XYZ direction0-10 mN along
the XYZ directionAll were less than
5% full scaleTable 1. Design requirements of 3D force sensor
-
首先要制作软体机器人中单节操作臂的模具,将制作好的模具固定在试验台上,并将光纤通过植入模具和胶水依次固定在软体操作器模具中,当光纤光栅处于完全伸直的状态之后通过量筒和玻璃搅拌棒混合特定比例的Ecoflex00-50,搅拌至无明显气泡后将混合溶液缓慢倒入固定好的模具中,静止24 h后脱模然后缠绕凯夫拉线,得到实验所需的软体操作器,其制作流程图如图1所示。得到的软体操作器由3个正压充气腔道和1个负压抽气腔道组成,植入的光纤均匀布设在软体操作器周围,光栅部分位于操作器末端,其光纤光栅的植入分布示意图如图2所示。

Figure 1. Flow chart of software operator fabrication

Figure 2. Distribution diagram of fiber Bragg grating implantation
-
当一定宽度频率的光入射FBG时,频率在λB附近的光波被反射出来,而波长不是λB的光波成功透射过FBG。λB被称为布拉格波长。而且,布拉格波长λB满足如下公式:
式中:λB为布拉格波长;neff是光纤的有效折射率;Λ为光栅周期。FBG的布拉格波长λB的大小与neff和Λ有关,当neff和Λ变化时,λB的大小也会随之改变,而neff和Λ主要受温度和应变的改变影响。所以neff和Λ可以分别改写为温度和应变的相关函数,并满足如下公式:
故在温度恒定的实验室或者人体温度下,FBG中心波长的改变仅受应变的影响。当FBG受到拉伸或者压缩,即仅收到轴向应变ε时,FBG的光栅周期Λ会发生变化,有效折射率neff受轴向应变影响较小,此时中心波长会产生漂移,偏移量为ΔλB。其公式如下所示:
式中:Pε为光纤的弹光系数。
-
根据分析,应变与施加在操作器末端的力成正比[18],如下所示:
式中:ε是FBG传感器的局部应变;M是由施加力Ft引起的弯矩;d是操作器末端与FBG之间的距离;E是杨氏模量;I是惯性矩;r是弯曲的中轴与FBG之间的径向距离。
FBG传感器的布拉格波长漂移线性依赖于局部应变和温度变化:
式中:Δλ表示布拉格波长位移;ε表示局部应变;ΔT表示温度变换;kε、kΔT均为应变常系数。为了消除三个传感器因为温度变化和轴向力而引起的共模,利用减去布拉格平均值来解决,处理后的差模信号再通过线性公式来表示求得,其计算过程下所示:
式中:Δλ表示布拉格波长位移;
$\Delta {\rm{\bar \lambda }}$ 为三根光纤波长漂移量的平均值。 -
由于操作器末端的光纤光栅波长漂移量不仅仅受轴向力的影响,还有部分横向力会使得测量数据存在一定的线性偏差,文中通过采用非线性拟合的方法来对轴向力的计算进行补偿,其全局轴向力计算过程如下。
线性模型—轴向力与应变之间的线性关系为:
式中:Fz是操作器末端的轴向力;Kz是轴向应变系数;Δλ为光纤光栅的波长漂移量。因为末端受力轴向力感知分量大于横向力感知分量,在局部呈现线性关系,而在全局存在非线性偏差,所以采用伯恩斯坦多项式来对全局轴向力进行估计,进行非线性补偿:
式中:Fz为估计的轴向力;n为伯恩斯坦多项式得阶数;Cijk为常系数;Δλ1*、Δλ2*、Δλ3*为被缩放到[0,1]区间得光纤光栅波长漂移量。其求解公式如下:
而bv,n则是i为1,2,3时的伯恩斯坦多项式,其定义如下:
伯恩斯坦多项式在区间[0,1]上表现出良好的数值稳定性,并且使用二阶多项式来避免过拟合。标定时应用已知的各向力,利用多项式插值得到轴向力的估计。可以用最小二乘法计算出轴向力的系数,从而得到轴向力的全局估计值。
-
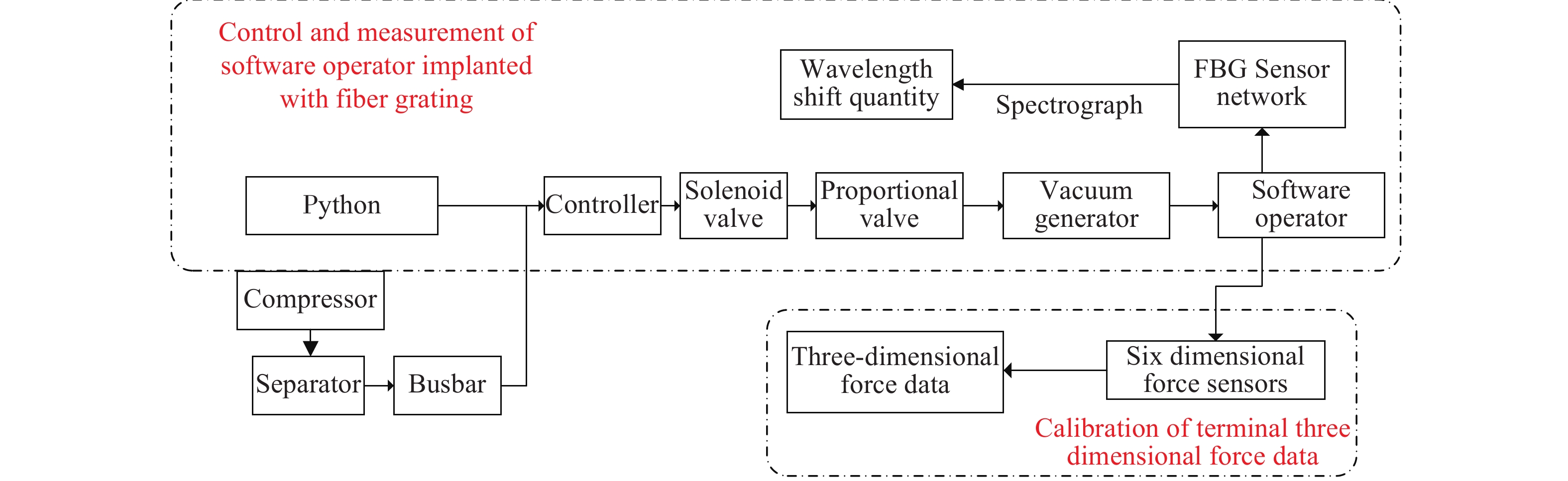
软体操作器末端力测量的工作技术方案主要包含两个部分:植入光纤光栅的软体操作器控制与测量以及六维力传感器标定。其中植入了光纤光栅传感器的软体机器人的驱动系统主要是由气路控制系统组成,通过压缩机、分离器以及汇流排形成气压,再通过控制器控制电磁阀比例阀来调节气压的大小,给软体操作器充入或抽取不同大小的气压,让软体操作器达到不同的姿态,然后在不同状态下通过六维力传感器感知施加到软体操作器末端的精准三维力数据,通过光谱仪的解调得到光纤光栅的波长漂移量变化,分析和标定软体操作器末端力与波长漂移量之间的关系,整体工作的流程图如图3所示。
Figure 3. Flow chart of force measurement at the end of software operator
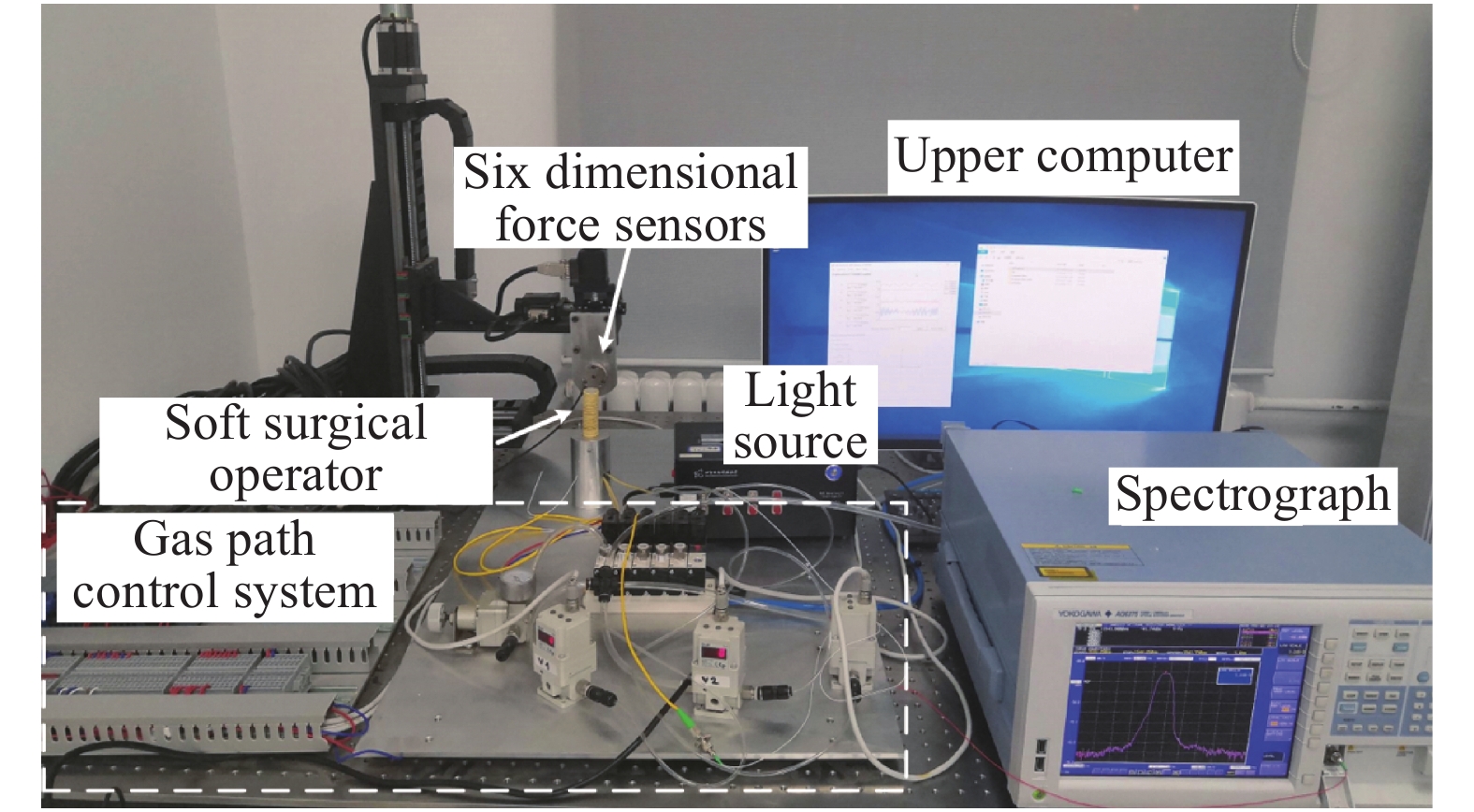
测量及标定实验系统主要包含的气路控制部分:其充气气压控制范围在0~10 MPa,可以保证软体操作器达到实验所需的不同姿态;光纤光栅解调部分:包含光源,光纤光栅,耦合器以及光谱仪,可以通过测量实验过程中光纤光栅的波长漂移量来用于分析处理;六维力传感器部分:传感量程在0~50 N,传感精度为0.1 mN,可以精确的测量到软体操作器末端受力,用于标定;PC上位机部分:用于控制PLC系统改变气压值以及记录六维力传感器的测量数据,在实验过程中通过记录光纤光栅的波长变化情况,得到不同位置下三种光纤光栅传感器的波长漂移量、六维力传感器的精确数据用于分析处理及标定验证,其实验系统如图4所示。

Figure 4. Experimental system for measuring force of the software operator
-
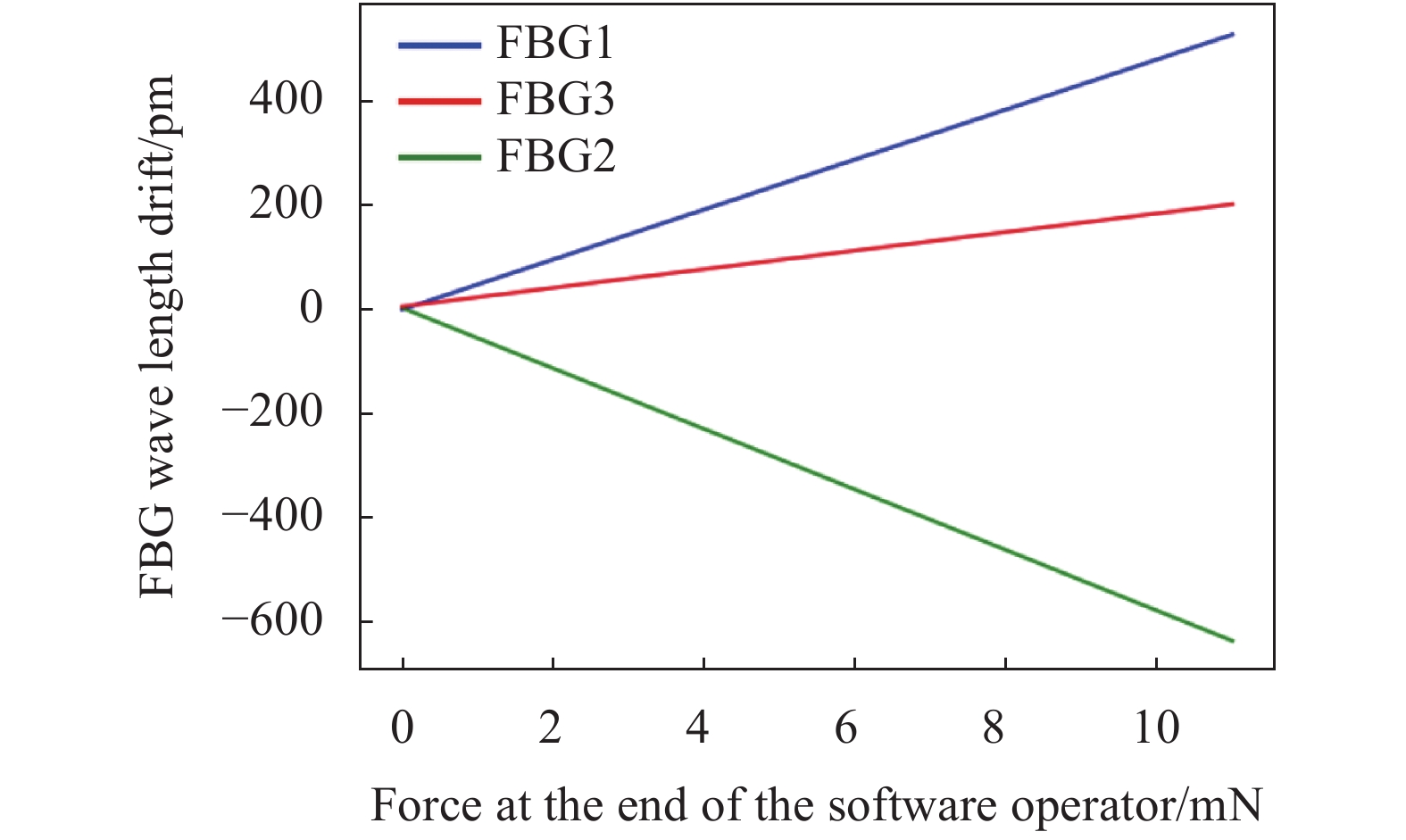
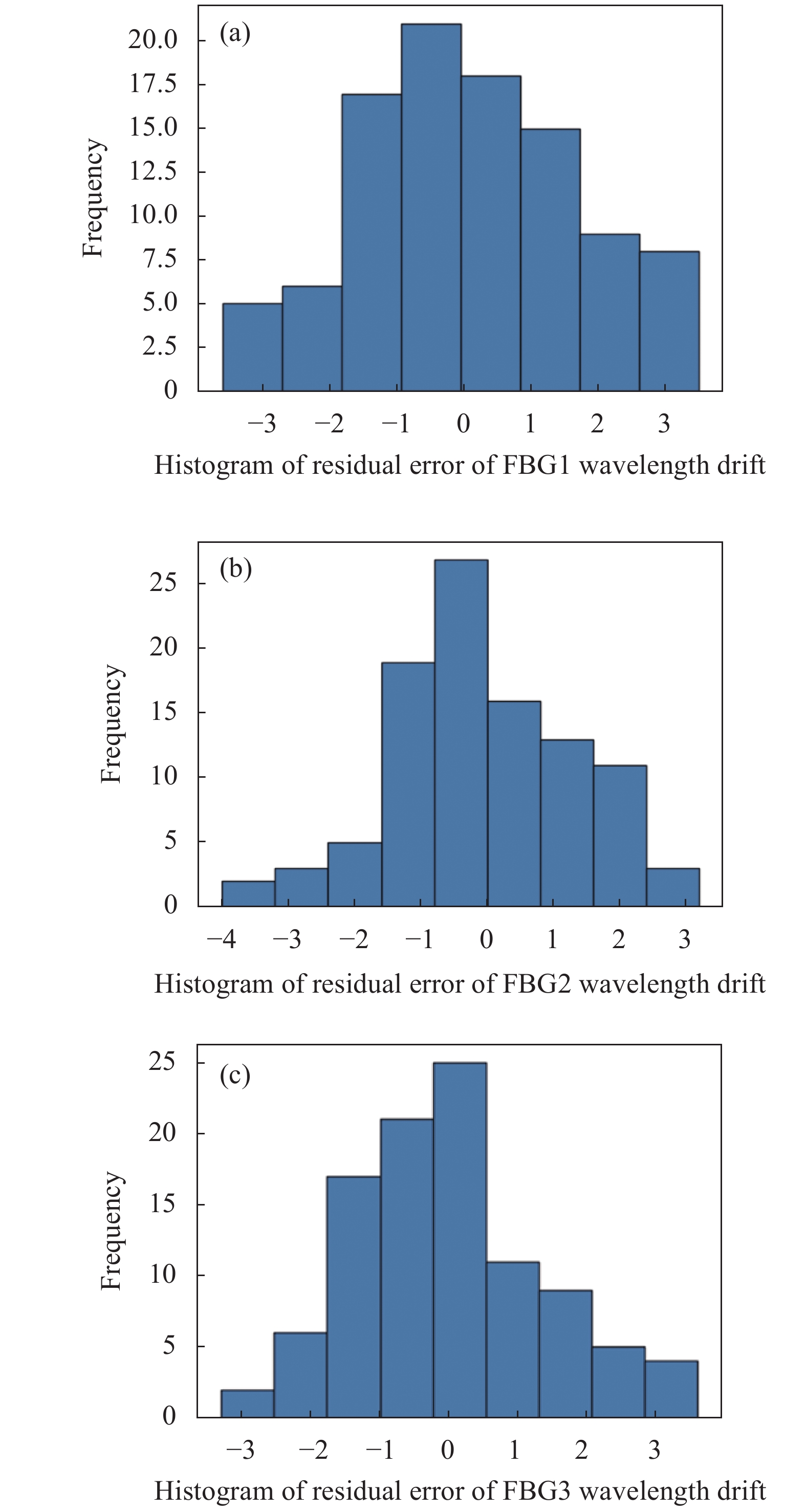
软体操作器在充入气压时,角度与充入气压在0.3~0.4 MPa区间,充入气压的大小与软体操作器弯曲角度呈现良好的线性关系,选取0.3~0.4 MPa气压区间对软体操作器以0.01 MPa的变化充入气压,在不同的气压大小下利用六维力传感器和位移平台对软体操作器末端施加0~10 mN的力,施压间隔为1 mN,通过六维力传感器的值可以获得当前作用在传感器上的外力值,此时FBG的波长变化同时也可以从光线解调仪中读出,从上述的10组数据求取平均值,分别记录了不同受力下三根光纤中光栅的波长漂移与操作器末端受力,如表2所示,数据的拟合直线如图5所示,由此可以看出计算模型中光纤光栅波长漂移量的变化与末端受力呈线性关系。对于每个子集,计算了布拉格波长位移的平均值和剩余误差。然后结合所有子集的残差计算每个FBG传感器的标准偏差,作为重复性的衡量。其三根光纤的波长漂移量的剩余误差的概率分布如图6所示,传感器FBG1、FBG2、FBG3的标准差分别为1.68、1.39、1.40 pm,而光谱仪的波长可重复性为1 pm,波长稳定性通常为2 pm,最大不超过5 pm,三个光栅的波长漂移量误差都小于2 pm,说明力传感器具有可靠的重复性,与光谱仪的固有光学特性是一致的。
Force at the end
of the software operator
F/mNFBG1 wavelength
shift quantity
Δλ1/pmFBG2 wavelength
shift quantity
Δλ2/pmFBG3 wavelength
shift quantity
Δλ3/pm1 50 −61 19 2 97 −118 39 3 138 −168 57 4 187 −226 76 5 232 −287 96 6 292 −348 115 7 338 −401 132 8 382 −471 151 9 432 −526 166 10 478 −577 175 Table 2. Forces at the end of the software operator and the wavelength drift of the three gratings were partly determined

Figure 5. Relationship between wavelength drift and stress of three fiber grating sensors

Figure 6. Histograms of the wavelength shift residual errors of the FBG sensor 1(a), 2(b), 3(c)
-
(1)横向力的线性标定与精度验证
利用六维力传感器的精确测量值来对软体操作器末端力进行线性标定。从解调仪获得的原始数据经过差分模式处理,可以利用最小二乘回归算法分别求解得到矩阵系数Kx,y:
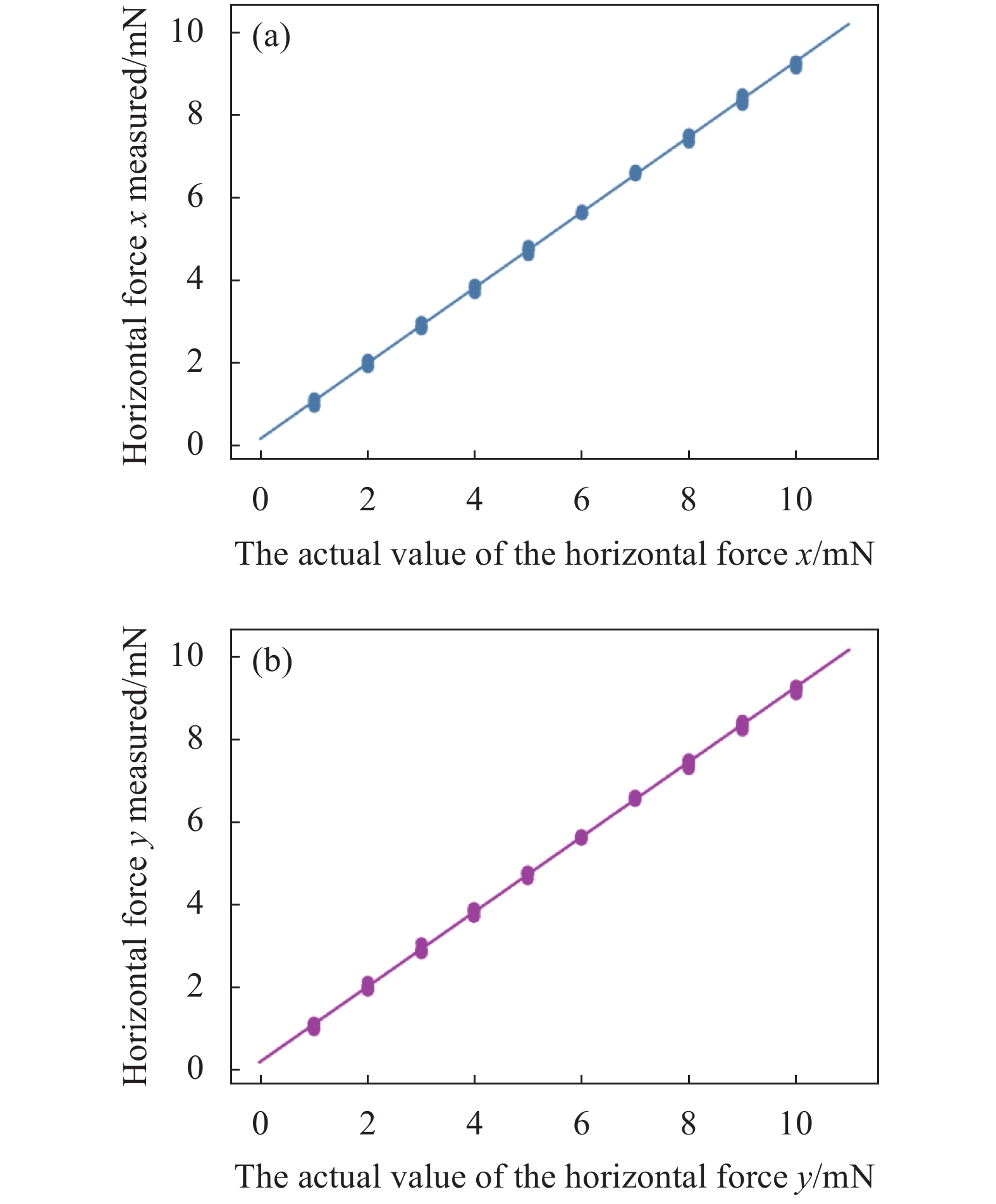
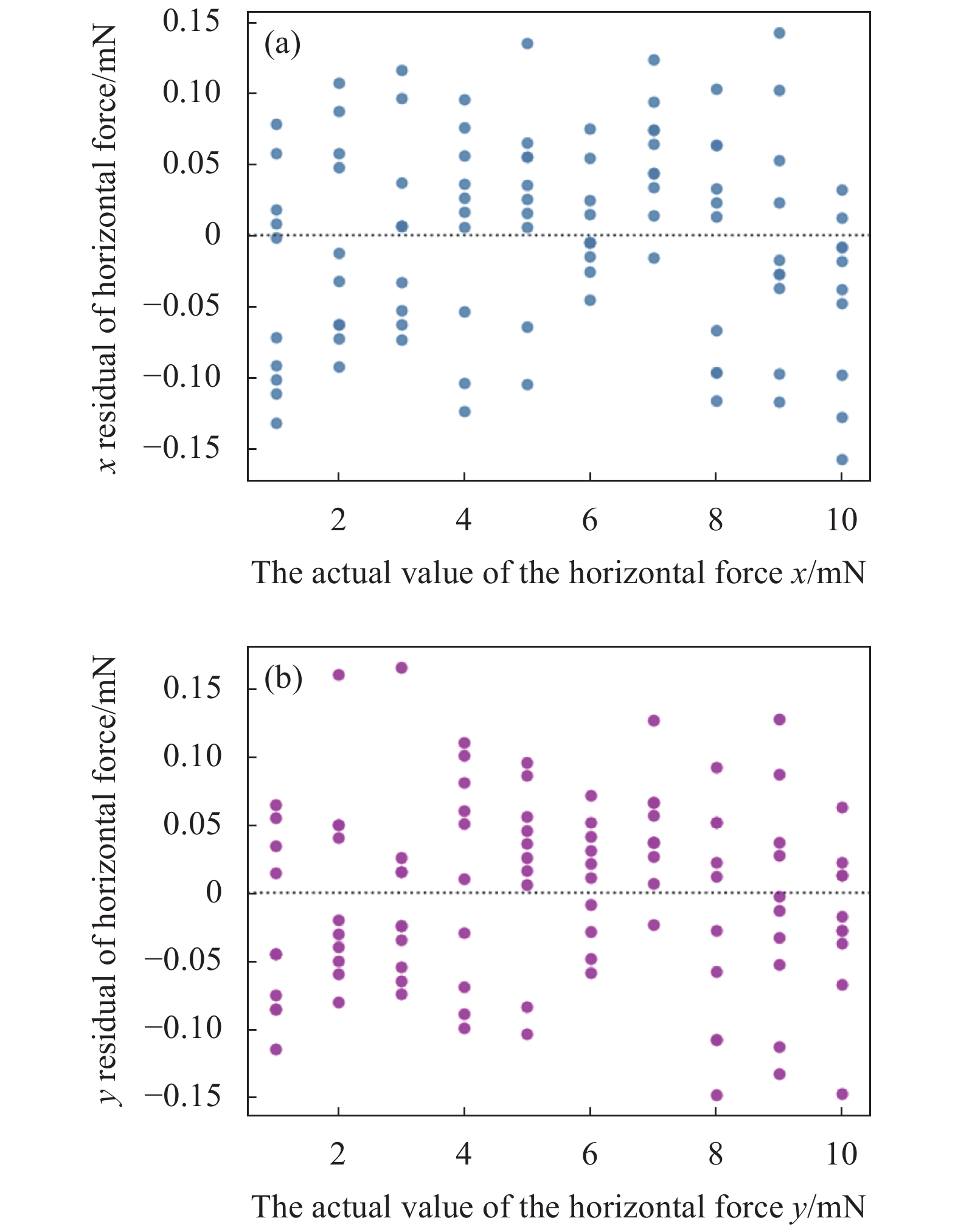
利用求解得到的矩阵系数与测量的FBG波长漂移量可以预测横向力,其通过将测量横向力与实际力进行线性拟合比对,根据理想的拟合情况在拟合后会产生一个斜率k=1并且通过原点的一条直线,得到的结果如图7所示,横向力Fx与Fy实际值与测量值的拟合直线基本达到拟合要求。图8显示了实际力与拟合产生的残差的对比。Fx与Fy的均方根误差分别为0.069 mN与0.066 mN,均小于满量程的5%,图9给出了Fx与Fy拟合残差的概率分布图,可以看出拟合产生的误差大都分布在−0.1~0.1 mN之间,有极少部分误差超过0.15 mN的现象,验证了实验数据的可靠重复性。但通过残差分布图可发现在施加压力为5~7 mN区间以及大于9 mN区间,出现了部分线性数据不好的数据样本,原因是受制于软体材料部分非线性特征的影响,未来改进方向上,考虑设计光纤夹具来减少软体材料非线性特征对力传感器的影响。

Figure 7. Calculated transverse force along X-axis Fx (a) and Y-axis Fy (b) versus the actual value using linear fitting
Figure 8. Residual caused by actual force and fitting

Figure 9. Histogram of the residual error of Fx (a) and Fy (b)
(2)轴向力的非线性校准与精度验证
从解调仪获得的原始数据经过差分模式处理,可以利用最小二乘回归算法分别求解得到矩阵系数Kz:
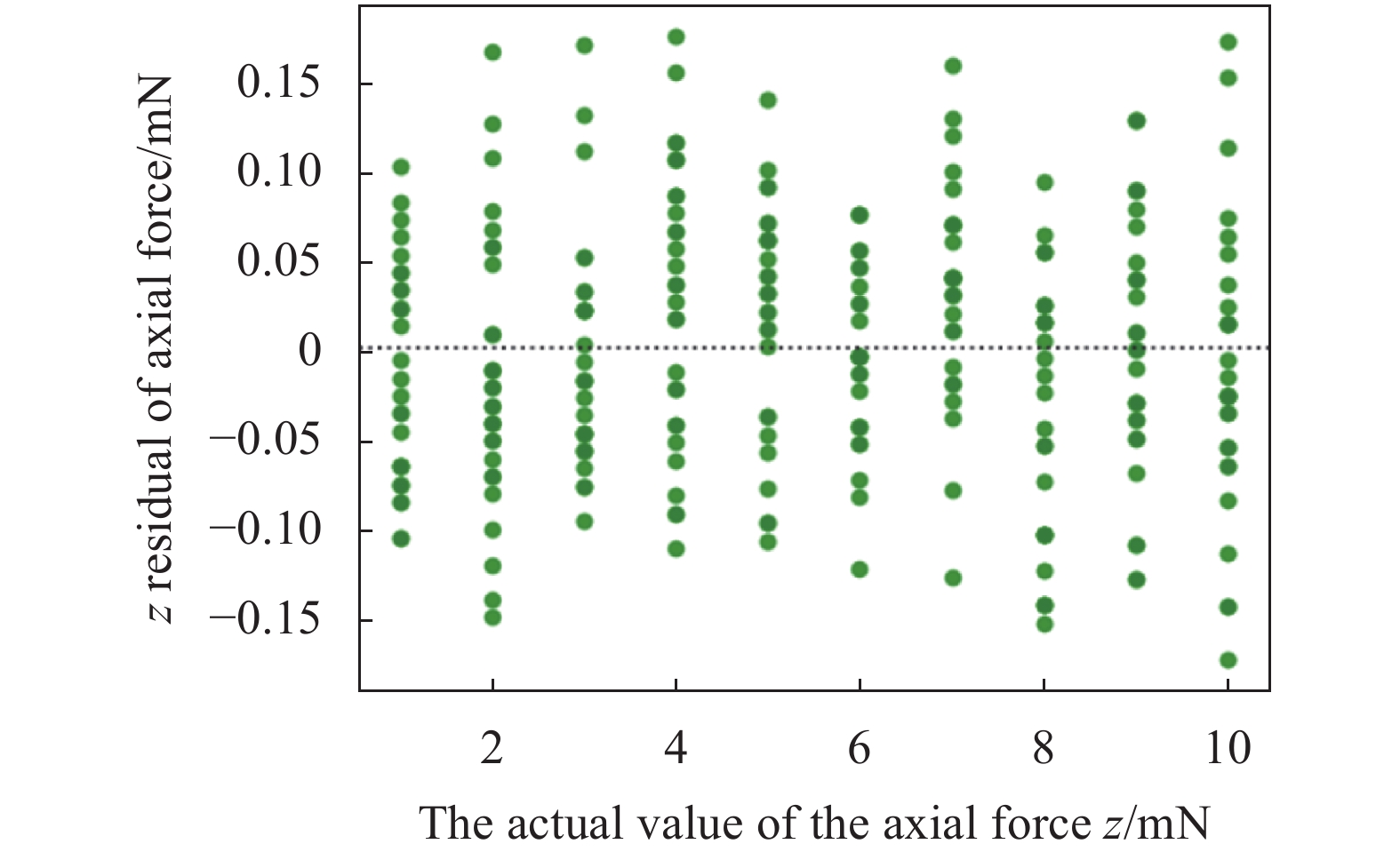
由于操作器末端的光纤光栅波长漂移量不仅受轴向力的影响,还有部分横向力会使得测量数据存在一定的线性偏差,所以轴向力二阶伯恩斯坦多项式的非线性校准为所有校准数据提供了一个有用的全局拟合,使得处理后的数据更全面、分布更广,如图10所示。残差的大小在测量力大小范围内保持的相当稳定,如图11所示,均方根误差为0.067 mN,小于满量程的5%,残差概率分布图如图12所示,拟合产生的误差大都分布在−0.1~0.1 mN之间,有少部分误差超过0.15 mN的现象,说明了实验的重复性和可靠性。通过对比横向力线性拟合残差图可以发现,采用伯恩斯坦非线性补偿算法有效的弥补了数据样本中部分线性度数据不好的部分,使得测量的结果更加精准可靠。
Figure 10. Set of measurements of rectified axial forces by the second-order Bernstein polynomial

Figure 11. Residual figure of axial force Fz

Figure 12. Histogram of axial force Fz residual
-
文中所提出的末端力测量方法,通过测量计算得到Fx与Fy的均方根误差分别为0.069 mN与0.066 mN,轴向力Fz的均方根误差为0.067 mN,均小于满量程的5%,Fx、Fy和Fz拟合残差的概率分布图显示产生的误差大都分布在−0.1~0.1 mN之间,有极少部分误差超过0.15 mN的现象,验证了实验数据的重复性和一致性。通过对采集的光纤光栅波长漂移量进行了剩余误差的求解和概率分布计算,传感器FBG1、FBG2、FBG3的标准差分别为1.68、1.39、1.40 pm,而光谱仪的波长可重复性为1 pm,波长稳定性通常为2 pm,最大不超过5 pm,三个光栅的波长漂移量误差都小于2 pm,与光谱仪的固有光学特性是一致的,具有良好的可靠性。
-
文中根据生物医疗领域软体手术操作器末端力反馈的需求,提出了一种基于光纤光栅传感器的微创手术操作器末端力传感方法,基于光纤光栅传感原理,将光纤光栅植入到软体机器人中,利用差分模式、线性模式以及伯恩斯坦多项式等方法来对横向力和轴向力进行全局估计,建立基于最小二乘法线性标定和基于伯恩斯坦多项式非线性补偿的软体机器人末端力解耦模型,分析求解得到光纤光栅的波长漂移量和软体机器人末端三维力的关系,通过气动控制软体操作器进行了相应的末端力测量、标定及重复性实验,研究结果表明光纤光栅传感器可以实现软体机器人XYZ各方向的末端力测量,光纤光栅传感的可重复性平均为1.5 pm,末端力在三个方向上的测量精度误差均低于满量程的5%,且残差概率分布大部分集中在可靠区间,具有良好的重复性。很好的弥补软体材料的非线性特性所产生的测量误差,计算解耦得到了软体操作器末端三维力,实验验证了解耦算法的可行性。对微创手术软体机器人的末端力精确测量提供了有效的新方法,对全面提升微创手术的质控技术与水平具有重要的意义和作用。
Research on end force measurement method of soft robot based on fiber Bragg grating
doi: 10.3788/IRLA20200386
- Received Date: 2020-10-10
- Rev Recd Date: 2021-03-01
- Publish Date: 2021-07-25
-
Key words:
- fiber Bragg grating /
- force sensor /
- soft robot
Abstract: The measurement of the terminal operating force of the surgical robot is the key to achieve the precise control of the robot, which is crucial to ensure the safety of the surgical operation. In this paper, a method of measuring the three-dimensional force of soft robot terminal end based on fiber Bragg grating was proposed to meet the requirement of minimally invasive surgery. Based on the principle of fiber grating sensing, the sensing characteristics of fiber sensor embedded in soft robot were analyzed and a soft robot terminal force decoupling model based on linear calibration with least square method and nonlinear compensation with Bernstein polynomial was established. Then the relationship between the central wavelength shift of the fiber Bragg grating and the three-dimensional force at the end of the soft robot was studied. The results show that the average repeatability of FBG sensor is 1.5 pm. The measurement accuracy error of the end force in the three directions of XYZ is lower than 5% of the full range, and the residual distribution is mostly concentrated in the reliable range, with good repeatability. The proposed FBG decoupling algorithm provides an effective method for the precise measurement of the terminal force of soft robot in minimally invasive surgery, and has a promising application prospect in the measurement of the terminal force of soft robot in biomedicine.






 DownLoad:
DownLoad: