







-
卫星激光测距(satellite laser ranging, SLR)是一项利用激光脉冲来精密测量地面测站到空间目标距离的大地测量技术,对监测大陆板块移动、地壳形变、地球自转和极移等研究具有重要意义[1-6]。在SLR原始数据中,除了激光飞行时间,还包含了随时间、环境、工作状态不断变化的系统时延值。地靶测量技术[7]是测量SLR系统时延值、校准SLR系统误差的重要手段。地靶测量过程中的误差来源主要包括电学系统误差、光学系统误差、数据处理误差等。其中,降低数据处理误差对于提高地靶测量数据的精度具有重要的意义[8-9]。
为了进一步提高SLR系统时延值的准确度,减小由数据处理技术引起的随机误差,文中对SLR地靶测距及相关数据处理技术进行了系统研究。首先建立了基于蒙特卡洛方法的SLR地靶数值仿真模型,得到了与实际相符的地靶回波信号点云分布图。其次,分析了SLR地靶测量过程中的噪声分布特点,提出了一种基于自适应噪声相关性匹配(adaptive noise correlation maching, ANCM)的地靶数据处理方法,完成了地靶数据中噪声与有效数据的分离。最后,利用ANCM法和传统地靶数据处理算法对中国科学院国家天文台长春人造卫星观测站(下面简称长春站)SLR地靶实测结果进行数据处理,分析比较ANCM算法的准确性及有效性。
-
SLR地靶测量是利用测距系统对地面已知距离的地靶目标进行观测,间接获取系统时延值的过程,其数值的大小随时间及环境等因素的改变呈一定的波动性和随机性。在现有的理论分析中,通常采用激光雷达方程对理想状态下的SLR地靶回波光子数进行简单估算,忽略了噪声实际分布的影响,无法充分描述SLR地靶回波信号的分布特点,不利于SLR地靶数据精度的进一步提高。蒙特卡洛数值模拟是一种利用计算机真实实验的统计方法,可以实现对整个测距过程的模拟并得到有效的回波统计结果[10-11]。为此,文中基于SLR地靶测距原理,采用Matlab语言,结合蒙特卡洛方法,完成了SLR地靶测距的仿真,具体的数值仿真流程如图1所示。

Figure 1. Flow chart of ground target numerical simulation of SLR
对于SLR地靶测量,通常采用激光脉冲的标准模型作为仿真输入模型,模型公式如下所示[12]:
式中:n为激光模型的类别,由于SLR系统激光器为普通调Q激光,设n=1;τ与激光半波宽P的关系为P=3.5τ,可根据实际激光器的半波宽参数求得τ值得到激光输入模型。
在SLR系统中,探测器接收到的回波信号除了有效的反射回波外,还伴随有各种噪声,SLR测量噪声值N为[13-14]:
式中:Nbr为目标黑体辐射噪声;Nbs为后向散射噪声;Nsl为日光背景噪声。对于SLR地靶,背景噪声主要来源于日光背景噪声,此噪声可用公式(3)表示[15]:
式中:ρ为目标表面的反射率;ƞr为SLR接收望远镜系统的接收效率;θr为目标探测视场角;Ar为接收望远镜的有效面积;Nλ为在大气层外在激光波长处的太阳光谱辐照度;Δλ为接收望远镜系统中的窄带滤光片的带宽;θs为日光照射方向与待测目标的表面法向量的夹角;T为双层大气透过率。
到达SPAD的平均噪声光子数为Na[15]:
式中:Ehv为单光子能量。将背景噪声强度转化为光子形式,可用公式(5)表示:
式中:ƞq为量子效率;Nb为相应时间段内探测到的噪声平均光电子数。
由单光子SPAD探测器探测模型可知,有效回波信号与噪声信号在每个距离栅格内出现的概率ƞs(i)与ƞn(i)均服从泊松分布[16-18]。对应于Ns(i)与Nn(i)内的每个距离栅格单元,分别产生概率为ƞs(i)与ƞn(i)的(0,1)二维随机序列,可根据应用需要调节序列长度。将目标回波序列和噪声回波序列按对应的距离栅格单元相加,得到初始二维合成回波序列S,统计每一级的距离栅格内对应的值为1的总数,找出具有最多的1值的栅格距离的序号i,以此序号作为泊松分布的λ参数,再利用泊松分布发生器产生一个随机的距离栅格序号i´。最后,根据距离与时间的对应关系将i´换算为地靶测量值完成一个脉冲周期的测量。
基于长春站SLR系统参数,设地靶距离D=3.699 m,激光器输出脉宽P=50 ps,频率f=1 kHz,量子效率ƞq=0.2,滤光片带宽Δλ=0.15 nm,望远镜接收效率ƞr=0.5,接收面积Ar=0.251 m2,目标探测视场角θr=10″,在λ=532 nm处,太阳光谱辐射照度Nλ=1484.9 W/m2,单光子能量Ehv=3.53×10−19 J,日光照射方向与地靶表面法向量的夹角θs=45.5°,大气双层透射率T=0.5,单次测距获得数据点数为10 000点。根据公式(1)~(5),结合地靶仿真流程,得到SLR地靶仿真测量数据。其中,地靶模拟测量数据的均值为209.7498 ns,标准差为0.049 7 ns,白天仿真地靶测量数据及其概率统计结果如图2所示。

Figure 2. Simulated ground target measurement data in daytime
为了验证上述仿真结果的准确性,笔者利用长春站SLR系统对地靶目标进行了白天环境下的实测,实验结果如图3所示。其中,长春站SLR地靶实测数据均值为209.738 ns,标准差为0.052 9 ns,与仿真结果基本相符,实测回波与仿真回波波形的皮尔逊相关系数为0.946 8。

Figure 3. Actual ground target measurement data in daytime (UTC:8∶05;TEMP:25 ℃,sunny)
为进一步验证SLR地靶数值仿真模型的有效性,重复执行仿真程序3次,并与3组白天实测地靶数据比较,结果如表1所示。
Simulated data points Actual data points 1 Total 10000 10000 Average/ns 209.7017 209.7344 Standard deviation/ns 0.0511 0.0557 Pearson correlation coefficient 0.9510 2 Total 10000 10000 Average/ns 209.7214 209.7275 Standard deviation/ns 0.0482 0.0510 Pearson correlation coefficient 0.9247 3 Total 10000 10000 Average/ns 209.7531 209.7391 Standard deviation/ns 0.0508 0.0498 Pearson correlation coefficient 0.9452 Table 1. Statistical results of simulated data points and actual data points
从表1可以看出,3组统计数据的皮尔逊相关系数分别为0.9510、0.9247、0.9452。比较结果表明,上述SLR地靶数值仿真程序可有效模拟SLR地靶的回波信号分布,产生与实测数据分布相符的仿真测量数据,为后续数据处理方法研究提供可靠的数据源和理论基础。
-
在传统地靶数据处理算法中,从回波的数学统计特征出发筛选SLR地靶的有效点数,以2.5中误差作为阈值对数据进行多次迭代处理并得到地靶有效观测距离值[8]。但是,由于地靶回波信号呈高斯分布,有效信号的筛选更依赖于回波数据本身的偏差,传统方法无法进一步去除夹杂在2.5RMS有效回波中的噪声点。为了进一步提高SLR地靶测距精度,弥补现有统计滤波方法的不足,文中从噪声分布的角度出发,提出了一种自适应噪声相关性匹配(ANCM)算法。利用长春站SLR系统对背景噪声进行实测,并作为短时静态实测背景噪声模板剔除回波数据中的噪声。具体算法流程如图4所示。

Figure 4. Flow chart of ANCM algorithm
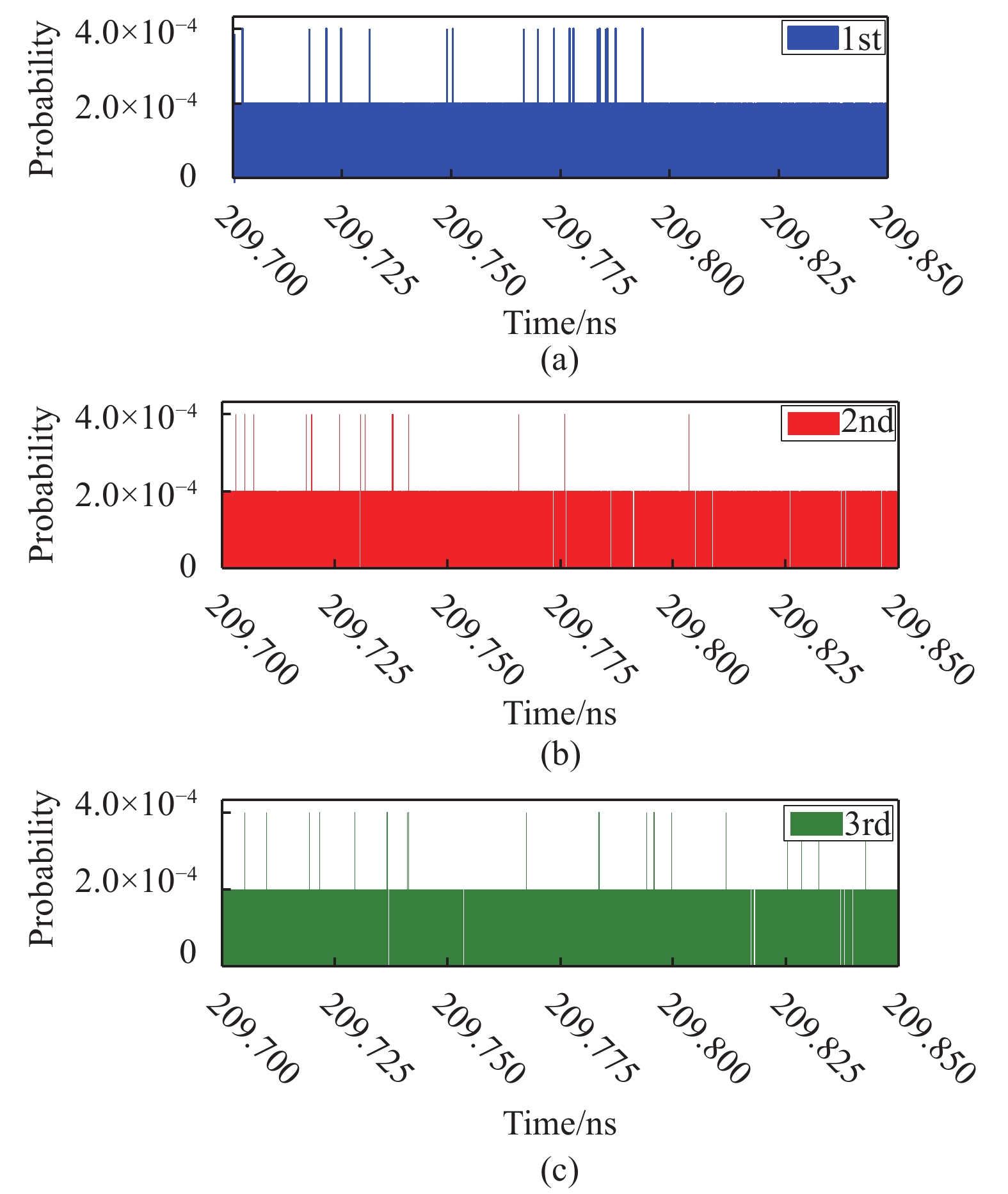
在ANCM算法中,首先利用短时静态实测背景噪声模板Np对地靶测距数据So进行预处理。以噪声模板的标准差σ1作为阈值,初步移除回波数据中的噪声点,得到经预处理后数据S ′。SLR地靶测量是一种典型的微弱光子测量技术,受到了各种噪声的干扰。这些随机噪声与来自地靶的反射回波相叠加,导致系统信噪比降低,严重影响了地靶测量精度。基于长春站60 cm SLR系统,笔者对白天背景噪声进行了测试,共测量3组,统计结果如图5所示。从图中可以看出,在同一观测环境下,背景噪声强度大且整体呈现均匀分布。因噪声受到温度、气压等环境因素的影响,其强度具有一定的随机性。

Figure 5. Statistics of pure noise data measured at Changchun station (UTC:8∶10;TEMP:19 ℃,sunny)
由于地靶测距量程短,噪声分布均匀,以实测的纯噪声点数据作为噪声剔除模板,最大限度地去除回波数据中噪声点,保留有效回波数据。图6(a)为使用SLR地靶数值仿真模型模拟地靶距离值为3 m时,得到的5000点模拟测距数据图像,图6(b)为使用噪声模板去除噪声后得到的测距数据图像。
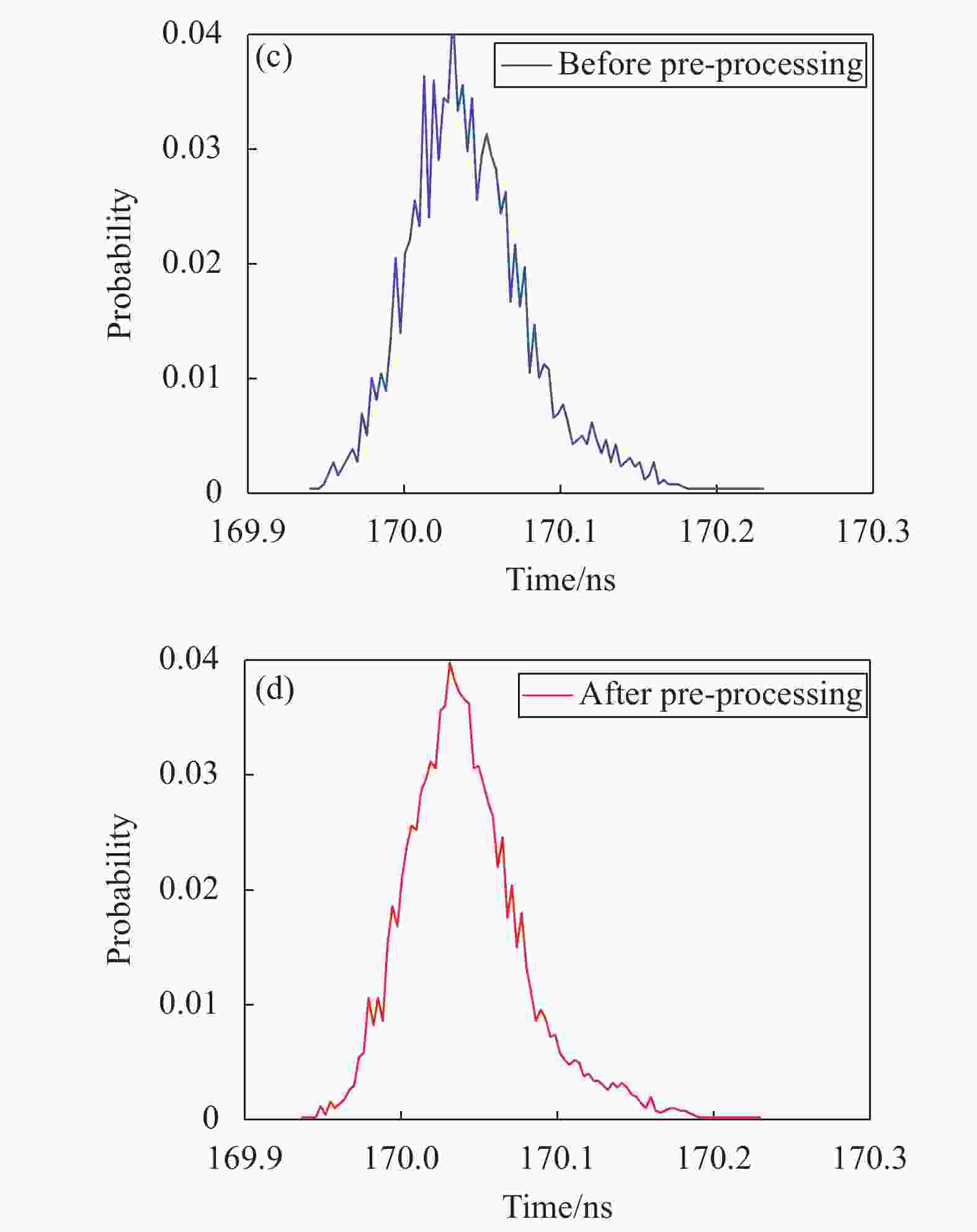
Figure 6. Data and echo waveform comparison before and after pre-processing. (a) Data before processing; (b) Data after processing; (c) Echo waveform before pre-processing; (d) Echo waveform after pre-processing
从图6(a)与图6(b)可知,预处理后点云数据密度降低。对ANCM预处理前后的回波数据进行了统计,统计结果如图6(c)与图6(d)所示。结果表明,与预处理前数据相比,经ANCM预处理后的地靶回波标准差由0.050 1 ns减小为0.039 4 ns,地靶回波波形更加平滑。这表明了该方法可有效去除噪声,同时改善地靶回波数据的稳定性。由于地靶数据受环境、温度、时间等影响,测距数据具有一定随机性。为了进一步去除噪声,利用SLR地靶数值仿真模型生成5组3 m地靶模拟测距数据,对每组地靶测距数据依频次进行统计,确定随机噪声阈值。当回波选取区间为出现频次在前0%~3.25%内的测距数据时,标准差趋于0;当回波选取区间为出现频次在3.25%以后的测距数据时,数据标准差变化幅度增大,地靶数据呈明显波动。结果如图7所示。

Figure 7. Standard deviation change of original data points (Distance of the ground target is set to 3 m)

为了保证地靶数据的稳定性,修改SLR地靶仿真模型中的距离参数,对具有不同距离的地靶目标进行了仿真,并利用上述方法获得了具有不同距离的回波数据稳定区间,结果如图8所示。

Figure 8. Threshold change of noise at different distances
从图8可知,由于系统时延值具有一定的随机性,对于不同距离的地靶,数据的稳定区间各不相同。为了保证地靶数据的稳定性,同时兼顾程序运行效率,将随机回波阈值设定为3.1%,即利用频次统计在前3.1%的数据的均值μ2与标准差σ2作为判断依据,对回波数据进行二次筛选,得到数据序列Z。
最后,采用最小二乘拟合方法实现对回波数据Z的压缩处理,将多项式结果Z与fi作差取绝对值,以数据标准差σ3作为判断阈值去除残余的噪声数据,得到有效地靶数据Z′。压缩处理可减小系统对大数据的运行时间,并最大程度地保留有效距离信息。表2为不同算法迭代次数对模拟3 m地靶测距数据有效点精度的影响。
Times Total Valid points Average/ns Standard deviation/ns 1 5000 848 169.9745 0.0177 2 5000 387 169.9741 0.0153 3 5000 329 169.9743 0.0126 4 5000 328 169.9742 0.0125 5 5000 328 169.9742 0.0125 6 5000 328 169.9742 0.0125 Table 2. Precision of valid points with different iteration times
从表2可以看出,随着算法迭代次数的提高,地靶数据的平均测量值与标准差趋于收敛。当迭代次数大于4次后,均值和标准差结果基本保持不变。这表明了ANCM算法经过4次迭代即可获得精度较高的有效点数据,且数据的稳定性较好。因此,为提高程序运行效率,在ANCM算法中采用4次迭代对地靶数据进行处理。
-
为验证ANCM算法的有效性与准确性,采用传统地靶数据处理算法与ANCM算法对长春站白天条件下测得的5000点实测地靶数据进行处理,处理结果如表3所示。
Traditional algorithm ANCM algorithm Valid points 200 267 Standard deviation/ns 0.0373 0.0153 Processing time/s 2.84 1.45 Table 3. Processing results of traditional ground target data processing algorithm and ANCM algorithm (UTC: 8∶55; TEMP: 22 ℃, sunny)
从表3中可以看出,与传统处理算法相比,使用ANCM算法得到的有效点点数增加了33.5%,地靶数据标准差从0.037 3 ns降低至0.015 3 ns。同时,ANCM处理时间从2.84 s降低为1.45 s,约提高了2倍,数据处理效率得到改善。
为进一步验证ANCM算法的适用性,对不同时刻的20组白天地靶实测数据进行了处理,统计结果如图9所示。

Figure 9. Statistical results between standard point algorithm and ANCM. (a) Change of precision; (b) Change of data points; (c) Change of processing time
从图9可以看出,与传统地靶数据处理算法相比,由ANCM算法得到的地靶数据处理精度提高了2倍左右,得到的平均有效点数提高了32.63%,观测数据质量得到明显改善。同时,算法处理效率提高2.3倍左右。这是因为ANCM算法采用了实测背景噪声和随机噪声阈值构建了噪声模板,进一步去除了混杂在地靶回波数据中的噪声,有效提高了SLR地靶数据质量。同时,ANCM算法优化了数据迭代次数,采用了更快、更有效的判断方法筛选回波数据,在提高有效点数据数量的同时,也提高了程序运行效率。
-
文中基于SLR系统地靶测量原理,建立了一种基于蒙特卡洛方法的地靶测距数值仿真模型,得到了与实际相符的SLR地靶测距数据。利用数值仿真模型生成的模拟地靶测量数据分析了SLR系统中噪声分布的特点,提出了ANCM数据处理方法。在回波选取区间与算法迭代次数等方面对ANCM算法进行了优化,完成了地靶测量数据中的信噪分离,得到了有效回波信号。与传统地靶数据处理算法相比,利用ANCM算法得到的长春站地靶数据点数增加了33.5%,数据标准差从0.037 3 ns降低至0.015 3 ns,有效降低了数据处理误差对地靶测距精度的影响,提高了数据处理的稳定性。为进一步验证ANCM的适用性,利用上述方法对20组不同时刻的白天地靶原始数据进行处理。结果表明,由ANCM算法得到的地靶数据处理精度可提高2倍左右,有效点数平均增加了32.63%,算法处理效率提高了约2.3倍,地靶数据处理的质量得到明显改善。文中的研究结果为获取系统时延值、校正系统误差提供了新的研究思路。
Numerical simulation and data processing of ground target in SLR system
doi: 10.3788/IRLA20200402
- Received Date: 2020-12-08
- Rev Recd Date: 2021-02-20
- Publish Date: 2021-09-23
-
Key words:
- satellite laser ranging(SLR) /
- Monte Carlo /
- ground target /
- numerical simulation /
- data processing
Abstract: Ground target measurement is of great significance to improve the ranging accuracy of SLR system, which can obtain the system delay and calibrate the system error. Based on the principle of ground target measurement with SLR, the model of ground target ranging was established by using Monte Carlo method, and the SLR ground target ranging simulation was realized. From the view of noise, the method of adaptive noise correlation matching(ANCM) algorithm was proposed to eliminate the noise in ground target ranging data. The echo noise template was constructed based on the actual measured data of short-term static background noise and the threshold value of random noise, combined with the simulated ranging data generated by SLR ground target measurement model, by optimizing the selection interval of data, the iteration times and other parameters, the effective return signal of ground target was extracted. Compared with traditional ground target data processing algorithm, the effective return points from ground target in Changchun Observatory/National Astronomical Observatories, Chinese Academy of Sciences is increased by more than 30% with ANCM algorithm, the ranging accuracy of data processing is improved by around 2 times, the efficiency of ground target data is significantly improved, it also provides a new idea to obtain the delay value of SLR system accurately.









 DownLoad:
DownLoad: