





HTML
-
在变体飞行器和柔性机器人等前沿技术领域,各类柔性机构(如柔性蒙皮、柔性连续体机器人等)三维位形参数的精确测量是控制其运动姿态精度的关键环节。在各类三维位形测量方法中,光纤传感方法以其体积小、重量轻、柔性好、可植入、易组网、灵敏度高和不受电磁干扰影响等特点,成为柔性机构运动姿态监测的重要方法之一,尤其在变体飞行器柔性蒙皮变形姿态实时监测和介入诊疗柔性机器人运动导航方面优势显著。
基于光纤布拉格光栅(Fiber Bragg Grating,FBG)的系统可实现形状传感。FBG是刻写在光纤纤芯中的反射滤波器,可以反射特定的波长。在同一轴向位置组合多个FBG可以计算曲线的曲率和方向角,最常见的配置是在要测量的结构周围选用呈等边三角形排列的三根光纤纤芯[1]。多芯光纤是由多根纤芯集成到一根光纤中的传感器,其本身具有弯曲敏感特性,且弯曲灵敏度远高于普通Bragg光栅,利用多芯光纤光栅制成的传感器可对弯曲进行测量[2]。
已有一些研究将光纤光栅传感器应用于柔性机构位形状测量,如Shi[3]等人创建了由血管内超声成像传感器、电磁传感器和FBG传感器组成的混合探头,并用FBG传感器进行柔性导丝的建模和重构。Khan[4]等人用4根多芯光纤传感器对柔性导丝的形状进行三维重构,验证了使用多芯光纤传感器对柔性机构进行形状检测的可行性。Jäckle[5]等人研究了用于血管内导航的柔性机构光纤形状传感,分析了重构过程中可能造成误差的因素并进行了校正,在血管内重构的平均误差和最大误差分别为1.13 mm和2.11 mm。Zhang[6]等人建立了分布式FBG传感器阵列,根据简化的形状重构算法,分别对软体机器手重建了二维和三维形状曲线,末端最大误差为8 mm。Sun[7]等人使用FBG传感器对柔性变体机翼进行3D形状感测,重建了不同翼型轮廓的聚酰亚胺蒙皮的3D形状,与数字摄影测量系统进行了对比,误差小于5%。在形状重构算法的研究方面,Moore[8]等人提出了一种基于曲线基本定理的方法,任何具有非零曲率的规则三维曲线的形状都可以通过其曲率和扭转确定。在数学环境中,曲线的扭转对应于方向角的变化,通过求解Frenet-Serret方程获得形状,但是该方法在曲率为0处的点中扭转不确定,无法获取中性层方向,因而无法解算曲率为0时的空间坐标,不适用于柔性结构的形状传感。Cui[9]等人提出了一种基于平行移动框架的方法来克服这个问题,形状的重构与Frenet-Serret相同。Roesthuis[10]提出了另一种基于圆弧段的方法:通过用曲率值常数近似重构形状。每一个元素对应的曲率
$k$ 和长度$l$ 的圆弧段都是由方向角$\varphi $ 旋转得到的,通过对每个给定集合($k$ ,$\varphi $ )重复此过程,可以获得整个形状。但是,相比于刚性结构,柔性机构的三维变形会产生更大的挠度和扭转,而且重构误差会沿着传感光纤逐渐累积增大,造成较大测量误差。目前,高精度的柔性机构三维位形光纤测量仍然是亟待解决的关键问题。为提高柔性机构三维位形参数光纤测量精度,文中提出了基于曲率与角度校正的多芯光纤三维形状重构方法。通过引入方向角和曲率校正系数,改进了柔性三维形变多芯光纤重构算法;分析了形状重构关键步骤中的主要误差源,以及模型算法参数对形状重构精度的影响;通过校正及补偿误差源提高了三维形状重构精度;对曲率和角度校正后的多芯光纤三维形状重构模型进行了实验分析与验证。
-
FBG传感器的中心波长如公式(1)所示:
式中:
${\lambda _{\rm{B}}}$ 为FBG中心波长;$\varLambda $ 为相位掩膜光栅周期;${n_{\rm{e}}}$ 为有效折射率。机械应变或温度变化影响反射波长,导致测量的波长$\lambda $ 相比于FBG的参考波长${\lambda _{\rm{B}}}$ 发生偏移,如公式(2)所示:如果FBG的参考波长未知,则必须在对光纤系统不施加应变的情况下,通过测量来确定。
在布拉格光栅中施加应变
$\varepsilon $ 或改变温度$\Delta T$ 所引起的波长偏移量$\Delta {\lambda _{\rm{B}}}$ ,如公式(3)所示:式中:
${p_{\rm{e}}}$ 为光弹性系数;${\alpha _\varLambda }$ 和${\alpha _n}$ 为热膨胀系数和热光系数。假设温度恒定的情况下即$\Delta T = 0$ ,则光纤光栅受到的应变可表示为:光弹性系数与应变灵敏度系数
$GF = 1 - {p_{\rm{e}}}$ 直接相关。光弹性被定义为反射波长随轴向应变而发生的变化。对于FBG系统,光弹性系数通常取${p_{\rm{e}}} \approx 0.22$ 。 -
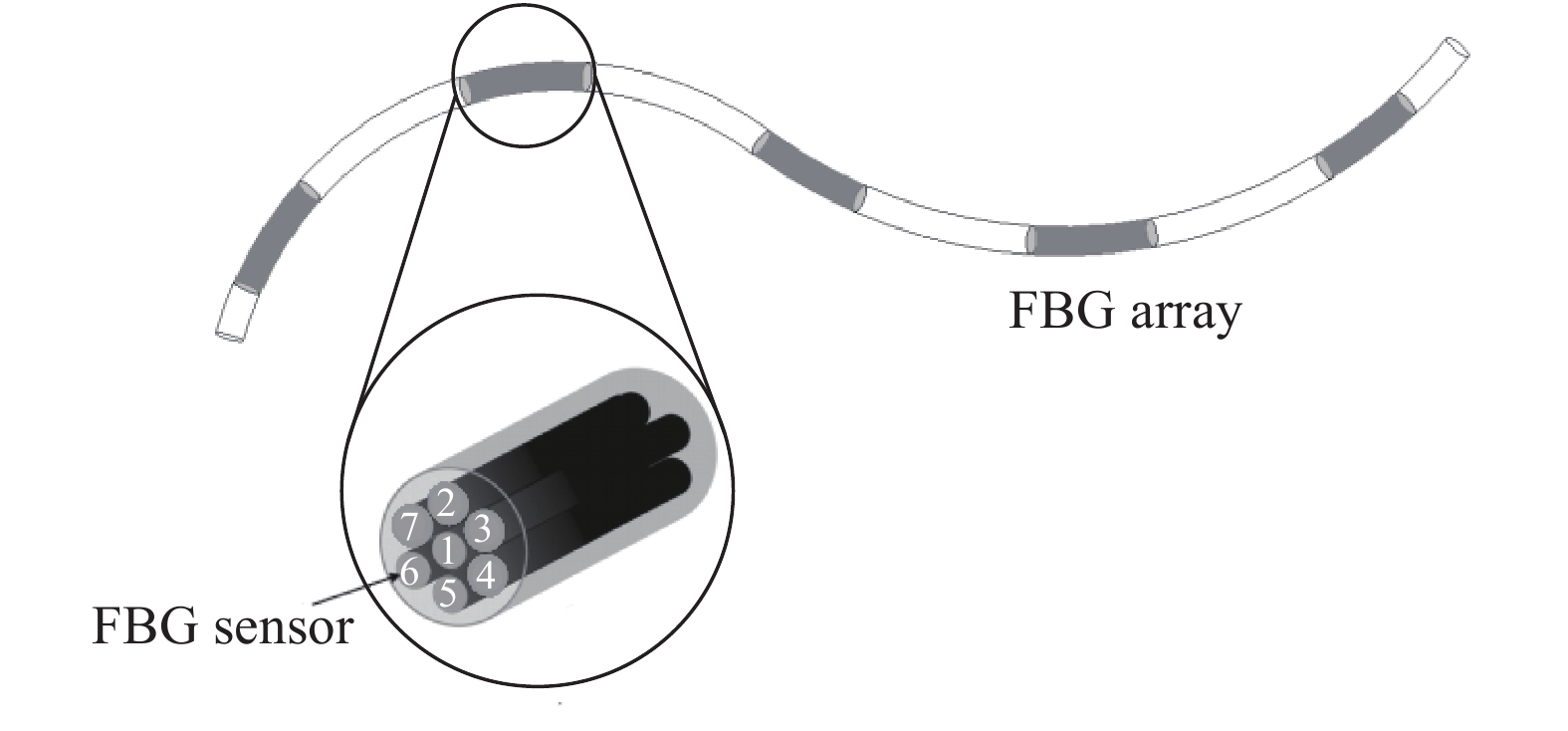
七芯光纤光栅传感器结构如图1所示。当计算每个FBG阵列的曲率和角度时,可以通过插值确定每个光栅测点间的中间值。目前,三次样条插值是最好的解决方案,也是插值效果最好的插值方法。曲率的内插较为简单,因为它对于每种形状都是连续的;对于角度内插,由于柔性结构在发生形变时存在不连续的角度,所以对角度插值较难实现;而应变是连续变化的,因此文中采用对应变进行插值的方式来计算得到曲率和角度。
Figure 1. Schematic diagram of seven-core FBG
曲率和方向角的计算取决于光纤系统,最常见的一种配置方式是FBG系统的三个纤芯之间呈120°等间隔分布,如图2所示。
在这种配置方法下,应变、曲率和方向角之间的关系如公式(5)所示:
公式(5)表明,曲率受半径
${r_x}$ 的影响与受光弹性系数的影响类似。其中${\varepsilon _x}$ 是应变,${r_x}$ 是半径,${\gamma _x}$ 是纤芯之间的角度。通过解方程组,可以得到曲率$k$ 、方向角$\varphi $ 和应变偏差${\varepsilon _0}$ ,应变偏差用来补偿由其他因素(如温度变化、附加轴向应变和压力)产生的影响,由于每一个FBG阵列中纤芯之间的距离都较短,可以假设对于一个阵列中的每个光栅,其受到的影响都等于应变偏差${\varepsilon _{\rm{0}}}$ ,并可由此补偿。该方程组还可以扩展至四根或更多根纤芯的光纤系统中。
Figure 2. Cross section of three-core FBG configuration
文中提出的FBG柔性线状曲率检测单元,其中心轴线弯曲形状可以近似地看作一条空间曲线,因而其形状的重构就可以转化为空间三维曲线的重构问题。曲率测量平面随着线状结构的弯曲而不断变化,其上各个点的位置也不断变化,因而可沿着线状结构弯曲变化的方向建立运动坐标系,利用空间曲线的重构算法实现三维空间形态重构[11-12]。基于上述思想,在弯曲变化的空间曲线上建立随曲线变化的刚体运动坐标系,如图3所示。

Figure 3. Schematic diagram of spatial curve reconstruction
图3中,假设
$ {O}_{1}、{O}_{2}、{O}_{3}$ 分别为一条空间曲线上沿弯曲方向的三个点,以${O_1}$ 为坐标原点建立固定坐标系,将曲率看成与切向量垂直的矢量,以${O_1}$ 点处曲线的切线方向为c轴,正交的曲率方向为a、b轴,则可建立点${O_1}$ 的运动坐标系,且两个坐标系重合。${k_1}$ 是正交曲率${k_{a1}}$ 和${k_{a2}}$ 的合成矢量,它与c轴构成的面为密切平面${\pi _1}$ 。假设${O_1}{O_2}$ 圆弧段极小且扭曲状态可以忽略不计,则该圆弧段可看作是密切平面${\pi _1}$ 上的曲线。以同样的方法在${O_2}$ 点建立运动坐标系,根据该微小弧段的弧长和该处的曲率计算出${O_2}$ 点在密切平面${\pi _1}$ 上的位置,进一步获得其在固定坐标系中的位置,这样就可以通过在不同密切平面上连接不同半径的微圆弧段而重构出整条空间曲线。 -
所确定的曲率和角度会受到各种变量的影响,因此进行以下校正:曲率由光弹性系数
${p_{\rm{e}}}$ 和中心距${r_x}$ 修正,由于两个参数都可以进行偏置,因此需要确定一个校正参数c以获得正确的曲率,如公式(6)所示:必须为每根光纤单独确定该修正参数。另外,光纤会在制作或存储过程中产生扭转,但是这些扭转不包含在
${\varepsilon _{\rm{0}}}$ 中。因此,可以获得一个测量角度为:由于存在一个扭转角
${\varphi _{{\rm{twist}}}}$ ,所以它不等于实际角度${\varphi _{{\rm{real}}}}$ 。如果不进行标定测量,则无法确定几何形状下的光纤扭转角${\varphi _{{\rm{twist}}}}$ ,其中$k \ne 0$ (见公式(5))。对于刚性仪器,此误差可以忽略不计,但是对于柔性机构,须确定扭转角的大小。 -
图4为实验系统图,包括多芯光纤传感系统、曲率标定板和三维模型。该系统主要由FBG传感器、七芯光纤扇入扇出装置、扫描式光纤光栅解调仪和上位机构成。设计的曲率标定板的每个曲率槽开口为45 °V型槽,槽深3 mm,对应的曲率分别为0 m−1、5 m−1、5.6 m−1、6.25 m−1、7.14 m−1、8.33 m−1和10 m−1。

Figure 4. Photo and schematic diagram of the experimental system. (a) Photo of the assembled entire experiment setup; (b) System principle diagram
如图1所示,七芯光纤由一个中心纤芯和六个外部纤芯组成。此次实验中采用3、5、7或2、4、6纤芯作曲率传感,1号纤芯用作温度补偿。每根纤芯上都有五个中心波长不同的FBG,栅区长度为1 cm,栅间距为3 cm,光纤总长16 cm。多芯光纤扇入扇出模块是一种实现多芯光纤各纤芯与若干单模光纤高效率耦合的器件,在多芯光纤的各项应用中实现空分信道复用与解复用的功能。采用长飞光纤公司的FAN-7-42七芯光纤扇入扇出模块,可以在−40~70 ℃条件下使用。扫描式光纤光栅解调仪依据激光器步进波长的输出以及其对应的同步信号的输出进行解调。采用旭锋光电公司生产的48通道FBGA光纤光栅解调模块,解调范围为1527~1568 nm,解调速率为1 Hz,最小分辨率为1 pm,波长精度为
$ \pm 5$ pm。数据接口为千兆以太网接口,解调仪将传感器中心波长漂移量转换为数字信号后,通过千兆以太网端口传输到上位机。利用 LabVIEW 和Matlab自主开发了上位机软件,实时显示重构的三维曲线形状。 -
首先将多芯光纤笔直地放置在曲率标定板
$k = $ $ 0$ 的曲率槽内,在无任何应力应变的影响下测量得到此次实验的参考中心波长,参考波长直接影响波长漂移量从而影响后续算法的计算结果,所以必须非常准确才能获得高精度的重构形状。实验中用到的多芯光纤传感器的中心波长如表1所示。Sensor number Central wavelength/nm 1 1543.30 2 1546.99 3 1551.07 4 1555.18 5 1559.26 Table 1. Central wavelength of sensors
使用具有不连续曲率的S形形状对插值进行评估,图5显示了利用三次样条插值方法对应变进行插值最终得到的插值曲率和角度。对应变插值而非曲率和角度可以得到更精确的插值:在不连续点处,曲率更接近于0,角度更精确,而对曲率和角度进行插值得到的结果在每个测点处的偏差都较大。因此,对应变进行插值会得到更接近于实际的曲率和角度,从而重构出更准确的形状。插值对形状精度的影响取决于栅区间距,FBG阵列栅区间距越大,则需要插值的点越多,对重构的精度影响越大。

Figure 5. Curvature and angle obtained by strain interpolation
为了确定扭转角
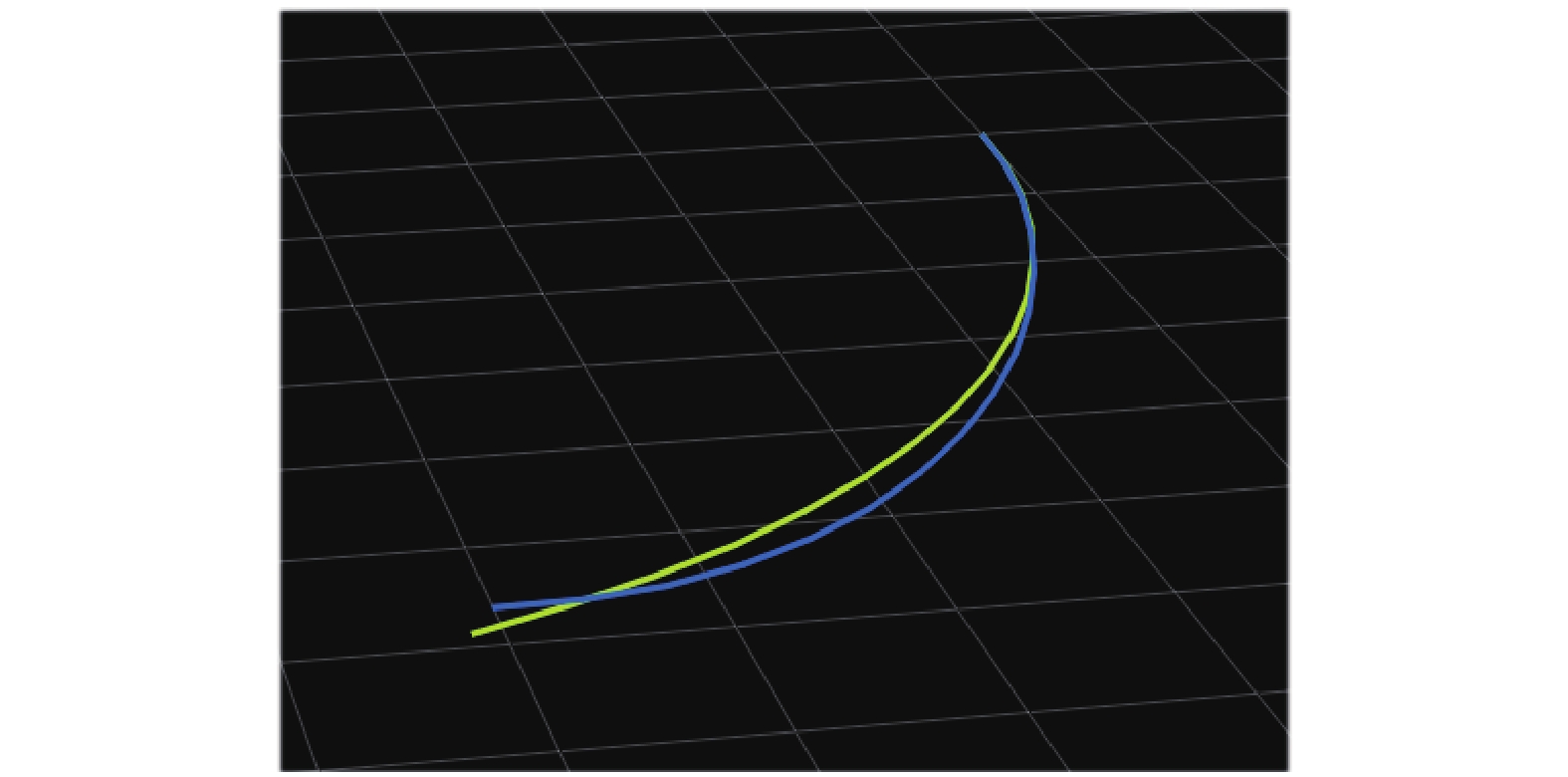
${\varphi _{{\rm{twist}}}}$ ,将光纤分别放置在不同的曲率槽内,此时可以获得每个光栅测点处的方向角$\varphi $ 。使用确定的角度作为扭转角,使每个光栅位置都具有相同的实际角度${\varphi _{{\rm{real}}}}$ (见公式(7))。当$k = 8.33$ 时,该实验的结果如图6所示,未经校正的曲线重构是带有扭转的(蓝色曲线),而校正后的曲线位于全局坐标系的平面上(黄色曲线),并且精度更高。
Figure 6. Angle correction
为了评估重构后的形状,采用如下误差计算定义式:
式中:
${x_0}, \ldots {x_n}$ 是重构的点;${x_0}^g, \ldots ,{x_n}^g$ 是全局坐标系下的实际光栅测点。然后将光纤分别放置在不同曲率下的曲率槽内以确定光纤系统的曲率比例因子,结果如图7所示,显示了使用不同比例因子和重构误差的关系,其中虚线表示最大重构误差,实线表示平均重构误差。
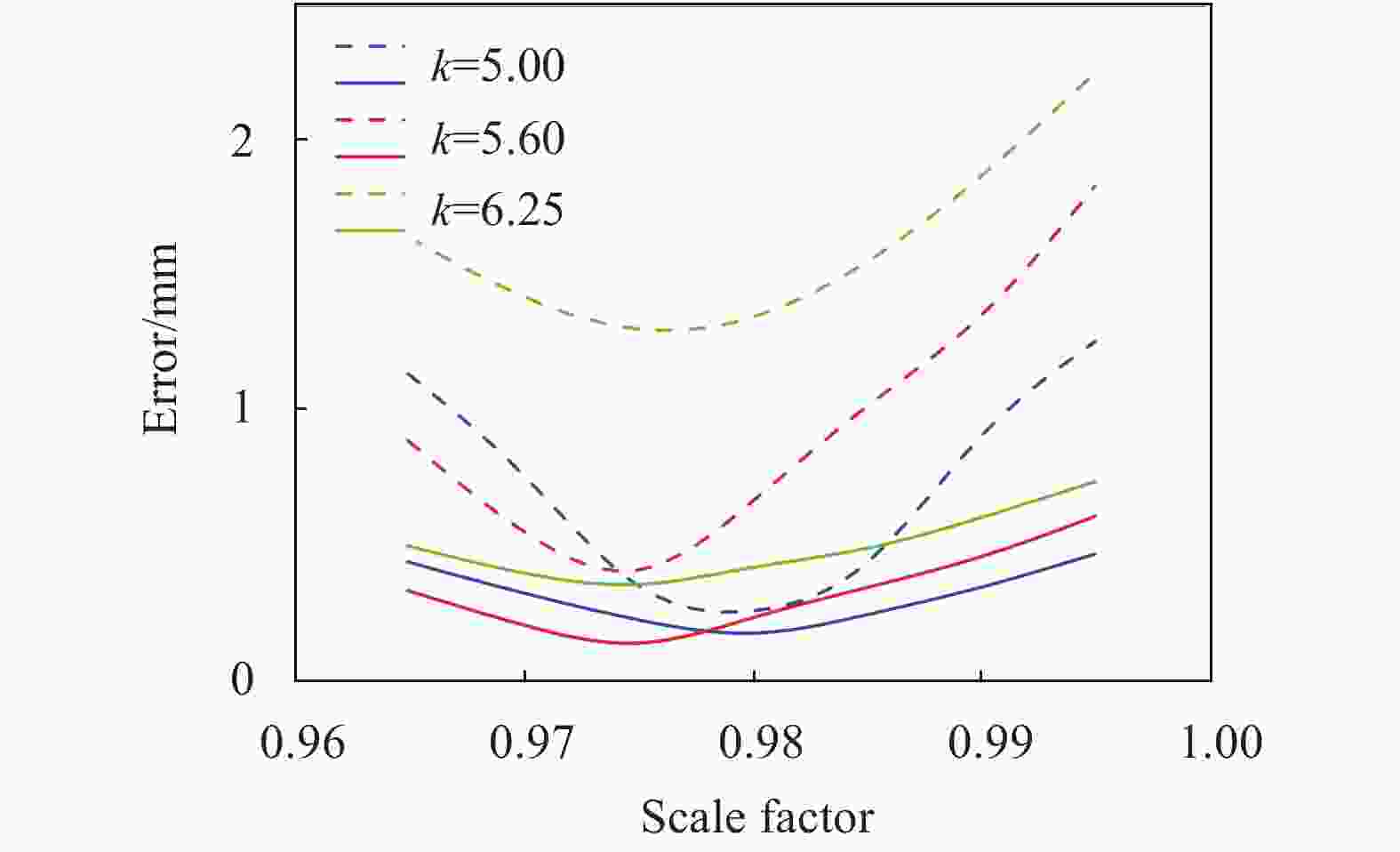
Figure 7. Relationship between curvature scale factor and reconstruction error
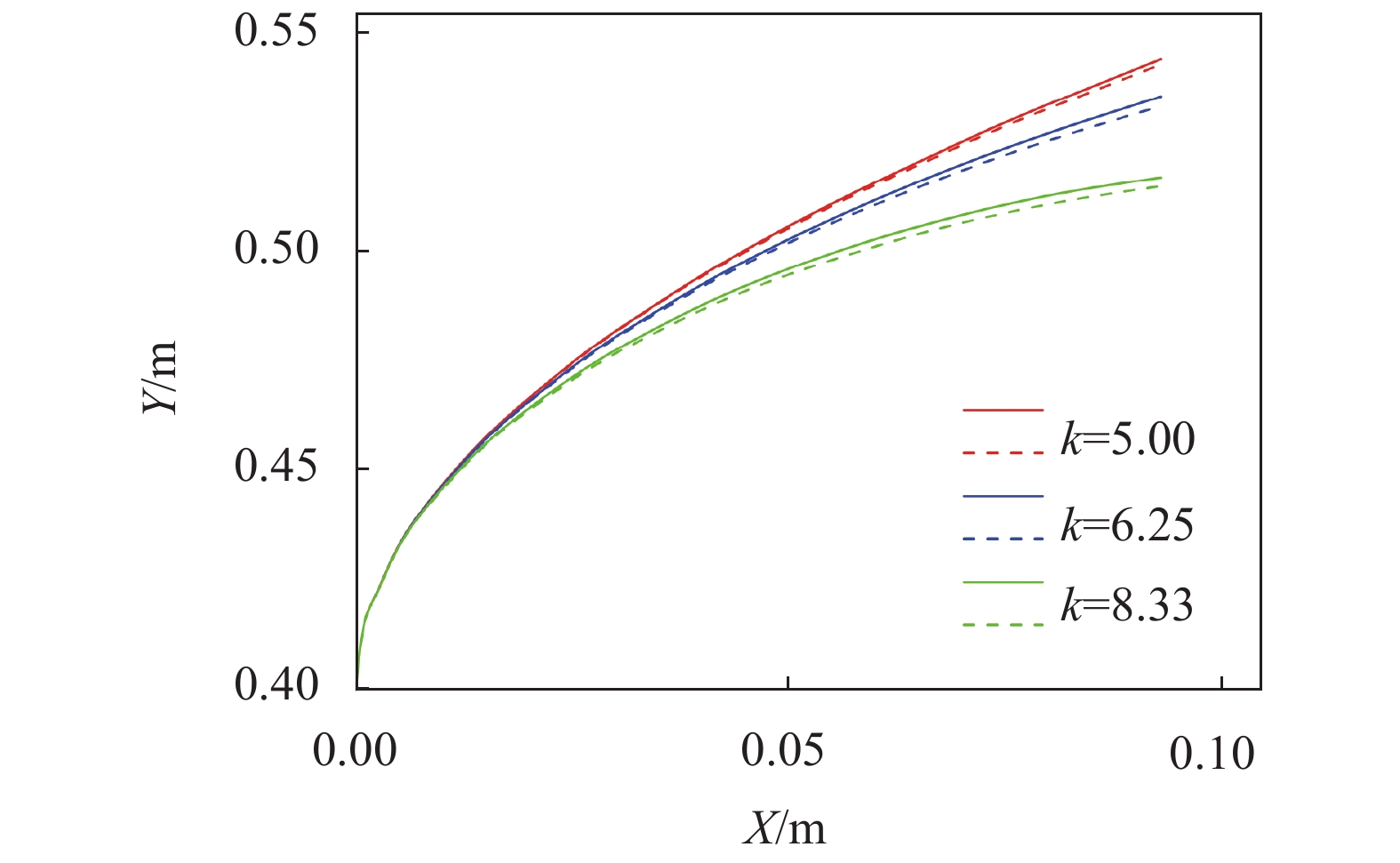
对数据进行处理后发现比例因子约为0.975时可获得更好的效果,将其添加到算法中用于光纤的曲率校正(见公式(6))。图8所示为曲率校正前和校正后的对比,其中虚线表示未校正的重构结果,实线表示校正后的重构结果。且未校正的重构误差会随着曲率的增大而增大。

Figure 8. Curvature correction
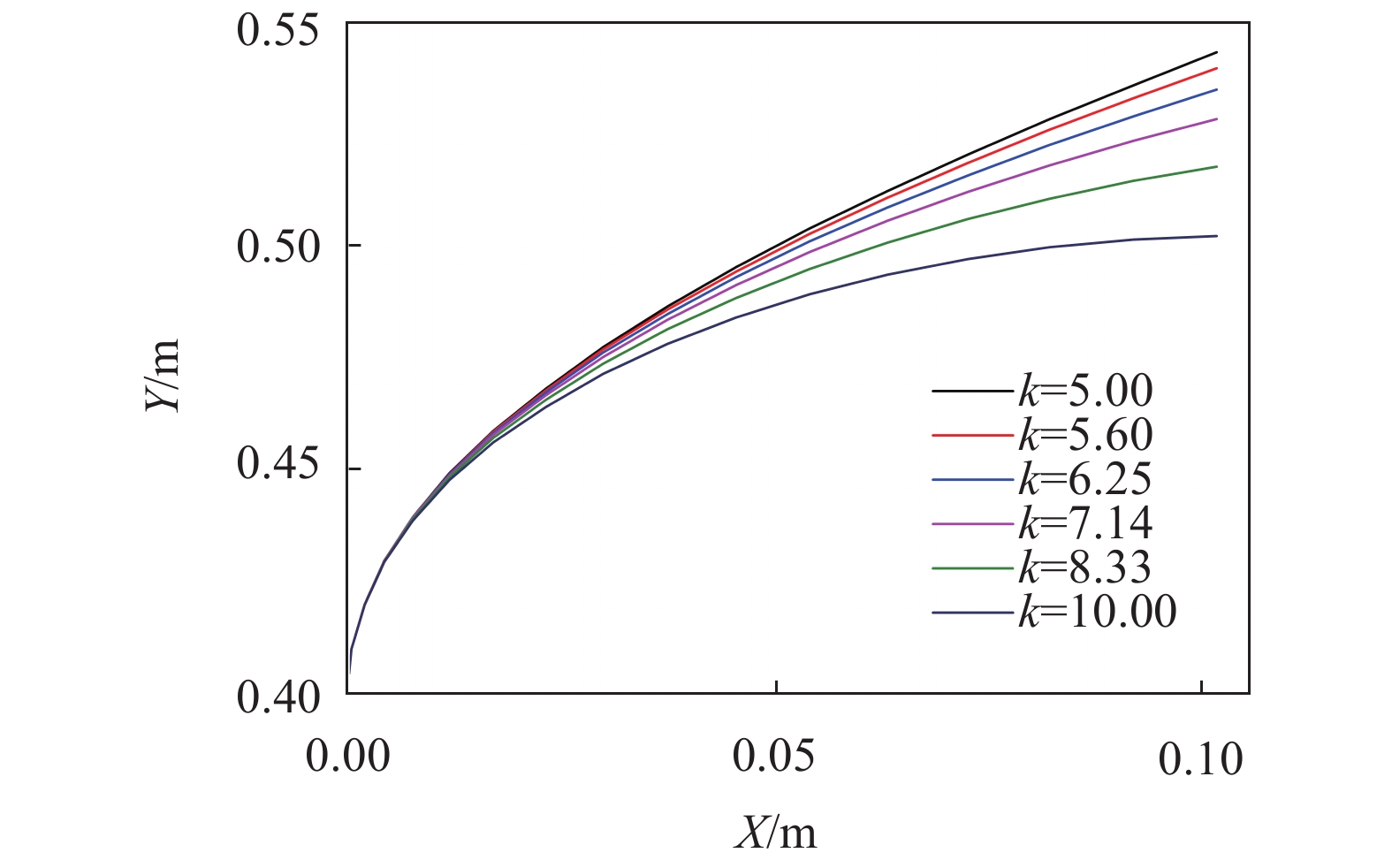
通过这两种校正后,将光纤分别放置在标定板的不同曲率槽内再次对重构形状进行测量,结果如图9所示。

Figure 9. Corrected reconstruction shape measurement results
通过这两种校正方法,形状重构的平均误差降低了0.8%,最大误差降低了3.7%,如表2所示。但是,这些校正可以补偿不会随时间变化的误差。其他误差(例如动态扭曲)不会得到修正。
Error With corrections Without corrections ${e_{avg}}$ ${e_{\max }}$ ${e_{avg}}$ ${e_{\max }}$ k=5.00 0.23 0.38 1.22 3.06 k=5.60 0.20 0.47 1.31 3.24 k=6.25 0.45 1.36 1.98 4.70 k=7.14 0.59 1.52 2.19 5.92 k=8.33 0.81 2.00 2.74 11.69 k=10.00 2.17 3.94 3.48 17.21 Table 2. Reconstruction errors of different shapes after and before correction
在实际应用中,柔性机构位形通常不规律,而能否准确获取柔性机构的复杂形态是关键。针对上述问题,将传感器围绕圆柱(半径:20 mm,螺距:25 mm)成螺旋型,用以验证重构效果,如图10所示。
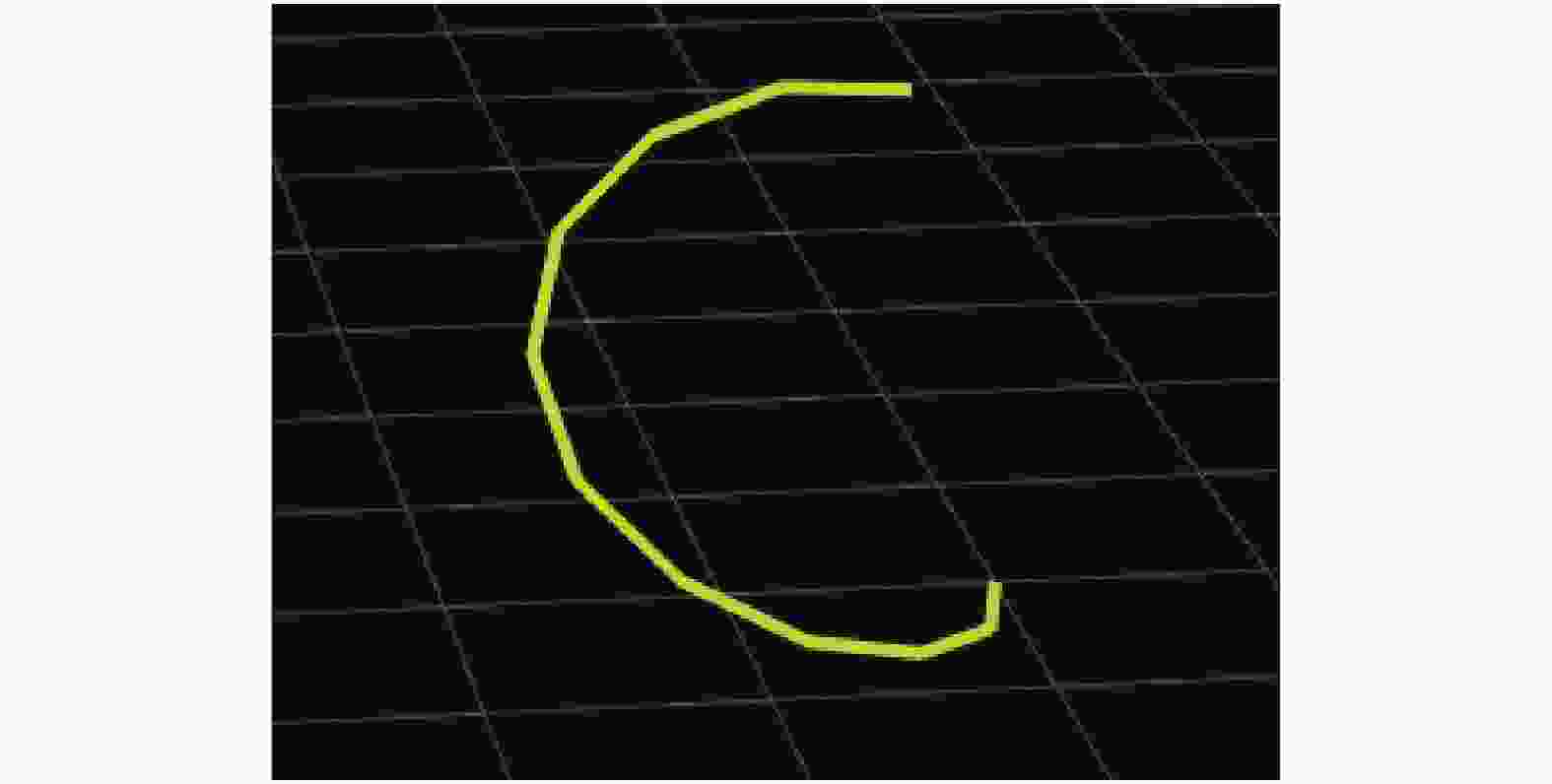
Figure 10. Helix shape reconstruction result
从图10的重构结果可以看出,利用文中提出的重构方法可准确重构螺旋型形状,重构平均误差为2.82 mm,最大误差为7.45 mm。与校正前的重构误差相比,平均误差降低了2.4%,最大误差降低了10.2%,说明该方法在一定程度上能够提高重构精度。
实验结果表明:(1)提出的基于曲率与角度校正的重构方法能够有效提高系统的重构精度;(2)重构精度取决于形状的复杂度;(3)在复杂位形重构中,还可通过增加FBG数量、减小栅间距、增加插值点等方式减小误差,提高精度。
-
提出了基于曲率与角度校正的柔性机构三维形状多芯光纤重构方法,通过对应变进行三次样条插值计算得到了更精确的曲率和方向角,对光纤中每个FBG传感器存在的扭转角进行了校正并根据曲率比例因子和重构误差的关系获得了曲率校正系数,加入到算法进行改进后显著提高了重构精度。最终得到圆弧重构的平均误差约为0.74 mm,最大误差约为1.64 mm。影响重构形状精度的其他因素还有所选光纤纤芯的配置方案、插值方法以及重构算法等。
对标定后的光纤系统进行了三维形状的重构进而评估了该方法的准确性。对螺旋型重构的实验结果显示平均误差为2.82 mm,最大误差为7.45 mm,重构精度提高了10.2%。实验验证了对曲率与角度进行校正的方法可显著提高多芯光纤三维形状重构的精度,为柔性机构三维形状传感提供了参考价值。































































 DownLoad:
DownLoad: