






-
激光雷达测绘卫星通过星载激光器以一定频率向地面发射激光脉冲,激光光束穿越大气后经目标散射,产生微弱的后向散射回波,该回波被激光测高仪上的望远镜接收,经过光电信号转换、时间测量计算得到激光器到探测目标之间的距离值,再结合卫星姿态、平台位置、激光指向等信息,最终获得激光足印点精确三维空间坐标[1]。激光雷达测绘卫星具备主动获取全球地表高程的能力,能够为快速获取包括境外地区在内的高程控制点以及立体测图提供服务,同时在极地冰盖、植被高度、海面高度测量等方面都发挥了重要作用[2-5]。
美国NASA 2003年发射了ICESat (The Ice, Cloud, and land Elevation Satellite)激光测高卫星用于监测全球冰盖高度变化,2018年发射ICESa-2卫星能够以更高精度和效率测量冰盖、植被和地形等表面高度[6]。我国在对月探测嫦娥系列卫星中使用了激光高度计[7],并在资源三号02星上搭载了激光测高仪开展试验探索[8],2019年发射的高分七号有望实现激光测高与光学立体相机业务化运行[9]。由于激光测高卫星具备全球主动高精度测量的显著优势,是获取境外控制点、DEM和DSM的可靠手段,特别是光子计数体制的ICESat-2卫星发射以来,数据密度和质量大幅提升,无论在国防和科学研究方面都具备重大意义。
文中论述对地观测激光测量卫星的发展及测绘应用,重点对新一代激光雷达测绘卫星ICESat-2的配置特点、数据处理和测绘应用情况进行分析。
-
星载激光雷达测绘设备最早在深空探测中得到应用,其探测环境、精度要求等与对地观测差异较大。如表1所示,国内外已有和正在规划的对地观测激光雷达系统[10]主要有SLA、ICESat、ICESat-2、ZY3-02、GF-7、GEDI和LIST。
Satellite/
payloadLaunch time Collect method Beam number Pulse
width/nsPoint
interval/mElevation
accuracy/mApplication SLA-01/02 1996/97 Full waveform 1 10 750 1.5 Global elevation control point ICESat/GLAS 2003 Full waveform 1 6 170 0.15 Sea ice, atmosphere, land,
vegetation, etc.ZY3-02 2016 Full waveform 1 7 3500 1.0 Experimental measurement ICESat-2/ATLAS 2018 Photon counting 6 1.5 0.7 0.1 Sea ice, atmosphere, land,
vegetation, etc.GEDI 2018 Full waveform 8 14 60 1.0 Forest biomass GF-7 2019 Full waveform 2 4-8 2900 1.0 Elevation control point LIST To be launched Photon counting 1000 1 0.7 0.1 Earth observation Table 1. Main technical specifications and applications of earth observation laser altimetry equipment at home and abroad
SLA (Shuttle Lidar Altimeter)是NASA开展的航天飞机搭载Lidar试验,用于制作全球控制点数据[11];ICESat卫星是全球首个以冰冻圈为重点的天基激光测高任务,该数据在极地冰盖变化估计、全球冠层高度测量等多个领域得到成功应用[12];ICESat-2是ICESat后续星,详细性能在后文介绍;GEDI (Global Ecosystems Dynamics Investigation)设备安装在国际空间站上,用作测量地球表面三维结构[13];ZY3-02星在国内首次搭载对地观测试验性激光测高仪,可用作1∶50 000立体测图高程控制点,辅助提升立体影像定位精度[8, 10];GF-7激光测高数据用于广义稀疏控制点测量,满足在少控制点条件下实现1∶10000立体测绘的应用需求[5]。LIST拟采用光子计数探测体制,用1000波束获得全球5 m格网大小和10 cm高程精度的地形信息,以及森林、湖泊、冰盖等地表高程变化[14],该卫星尚在计划发射中。
-
ICESat-2与ICESat最显著的变化是采用光子计数激光雷达替代传统线性探测体制,后者需返回成千上万个光子,并通过全波形采样和波形分析才能获得点云坐标,而ICESat-2光电倍增管接收器探测灵敏度在单个光子级别,能够对每个返回到接收器的光子都标记时间,并计算坐标,大大提升了探测效率。
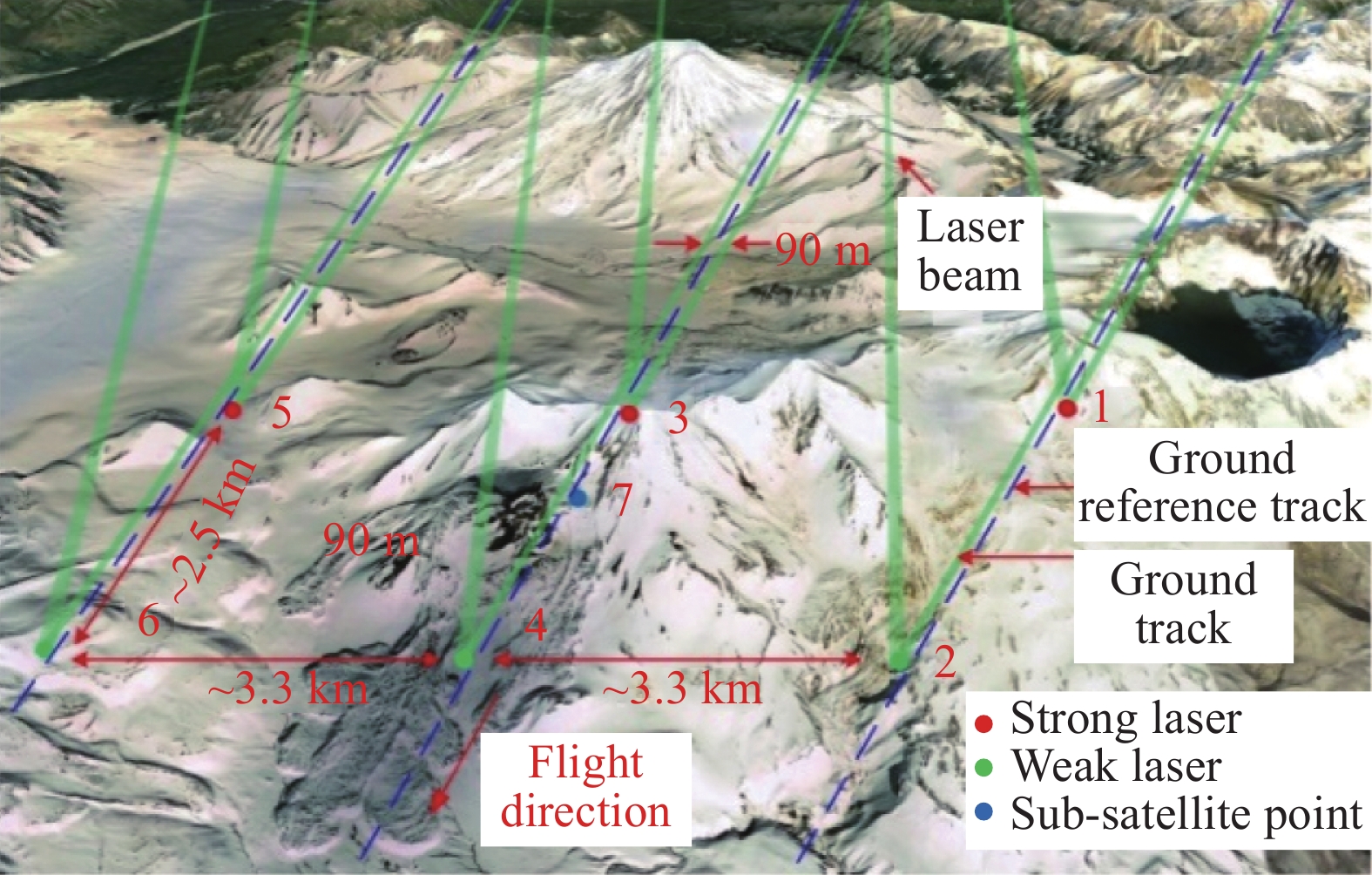
ICESat-2基本配置参数如表2所示,卫星轨道高约500 km,倾角92°,能够覆盖南北88°范围。ICESat-2地面波束几何结构设置如图1所示,6束激光一强一弱组成2组,强弱激光组内垂轨方向间隔90 m,可以借此进行坡度测量。由于卫星首要科学目标在于测量冰冻圈变化,要求前后多次测量尽量在同一/相近位置。ICESa-2设置了1387个地面参考轨迹RGT (Reference ground tracks)固定不变,为了保证得到参考轨迹线的高程值(内插),必须让强弱光束分别位于RGT的左右两侧,因此要求激光的指向控制精度优于45 m[6]。由于采用了光子计数探测体制,发射激光的能量大幅减小,强波束为120 μJ (弱波束为四分之一),激光重频大幅提高,达10 kHz,沿轨点间隔仅0.7 m,数据密度相比ICESat得到极大提升。
Item Value Orbital inclination/coverage 92°;Covering 88° between north and south Orbit type 91 days repeat orbit Orbit eight 500 km Pointing control accuracy 45 m Horizontal accuracy 6.5 m Laser wavelength 532 nm Laser repetition 10 kHz Number of beams 6 bundles, one strong and one weak to form 3 groups Beam spacing (vertical track) 90 m within the strong and weak group, 3.3 km between the groups Point cloud interval (along track) 0.7 m Footprint size <17.5 m Table 2. Basic parameters of ICESat-2
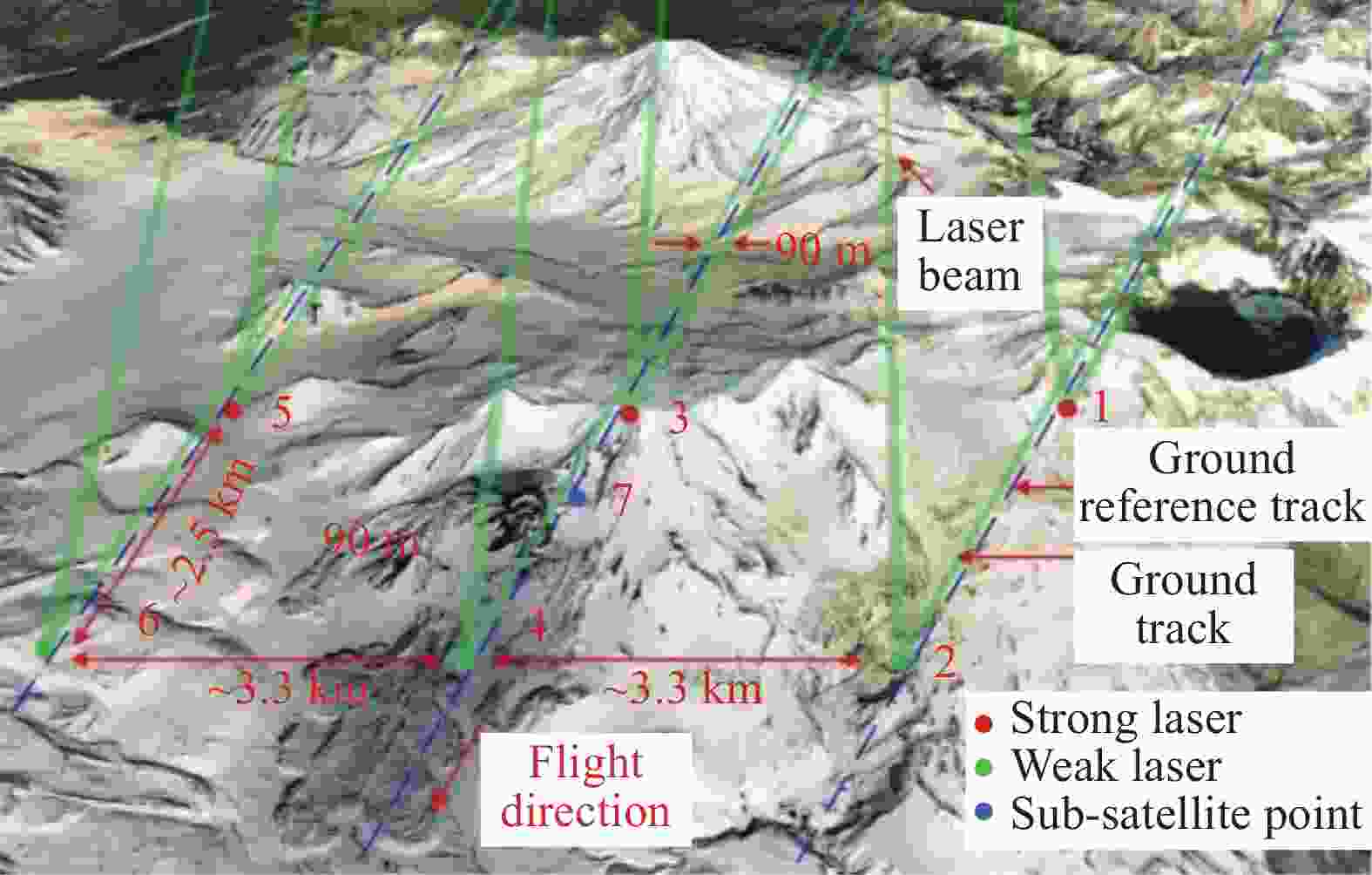
Figure 1. Diagram of ICESat-2 ground beam geometry
-
光子计数激光雷达探测灵敏度极高,也导致噪声很多,数据信噪比差。虽然ICESat-2接收器安装了窄带滤波片,将波段范围限制在(532.272±0.15) nm,但该范围内仍有大量背景太阳光。在某些高太阳角和高地面反射率场景下,背景光噪声率达到约10 MHz (即每秒1千万个,换算到高程方向每3米1个噪声点)[15],因此点云去噪至关重要。
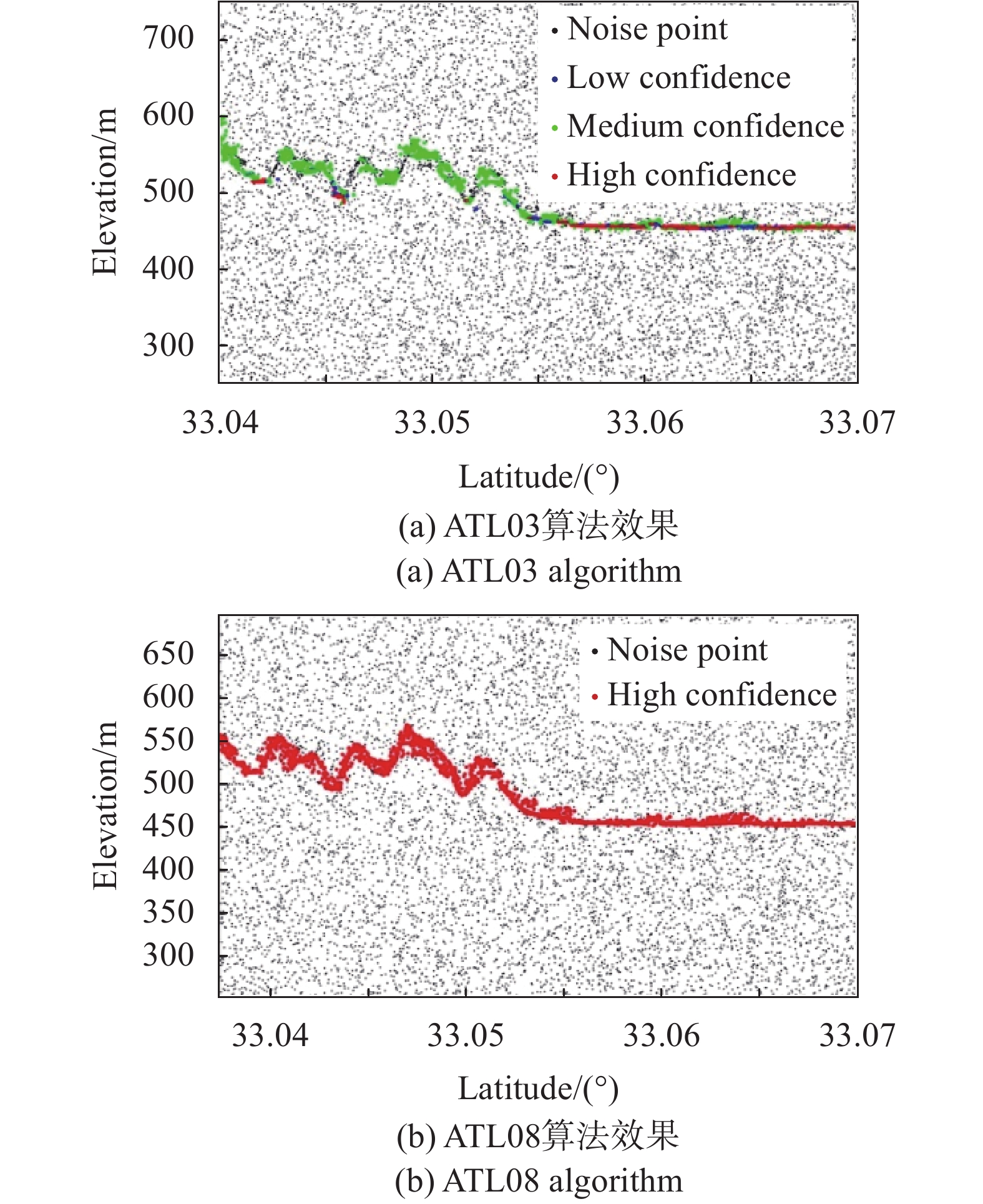
目前已有的光子计数激光雷达设备多数只沿飞行方向记录数据(摆扫较为少见),因此通常在二维剖面进行处理。ICESat-2基础理论算法文档ATL03[16]、ATL08[17]中分别提供了直方图和空间密度两种去噪算法:直方图法认为在垂直方向点出现次数最多的位置更可能是信号[15];空间密度法认为信号点在空间分布上更密集,密度直方图会呈现“噪声在左、信号在右”,“噪声高窄、信号低矮”的分布特点[18]。二者去噪对比效果见图2,ATL03算法在平原冰盖区效果较好,在植被区会出现明显的信号点漏提,ATL08更适合植被地形区域[19]。此外,在搜索核形状、地形相关、方向自适应性等问题上的针对性设计能进一步提升算法性能,获得优于98%去噪精度[20-21]。

Figure 2. Comparison of photon counting lidar point cloud denoising effects
-
大多数ICESat-2指标是以高度变化来表示,要求在整个飞行任务期间每年监测0.2 cm的高度偏差变化,激光载荷精确在轨标定对达到上述指标至关重要。对500 km轨道高度的ICESat-2而言,1″的指向角误差会导致约2.4 m的平面误差,若地面坡度为2°,则会产生8.3 cm的高程误差。
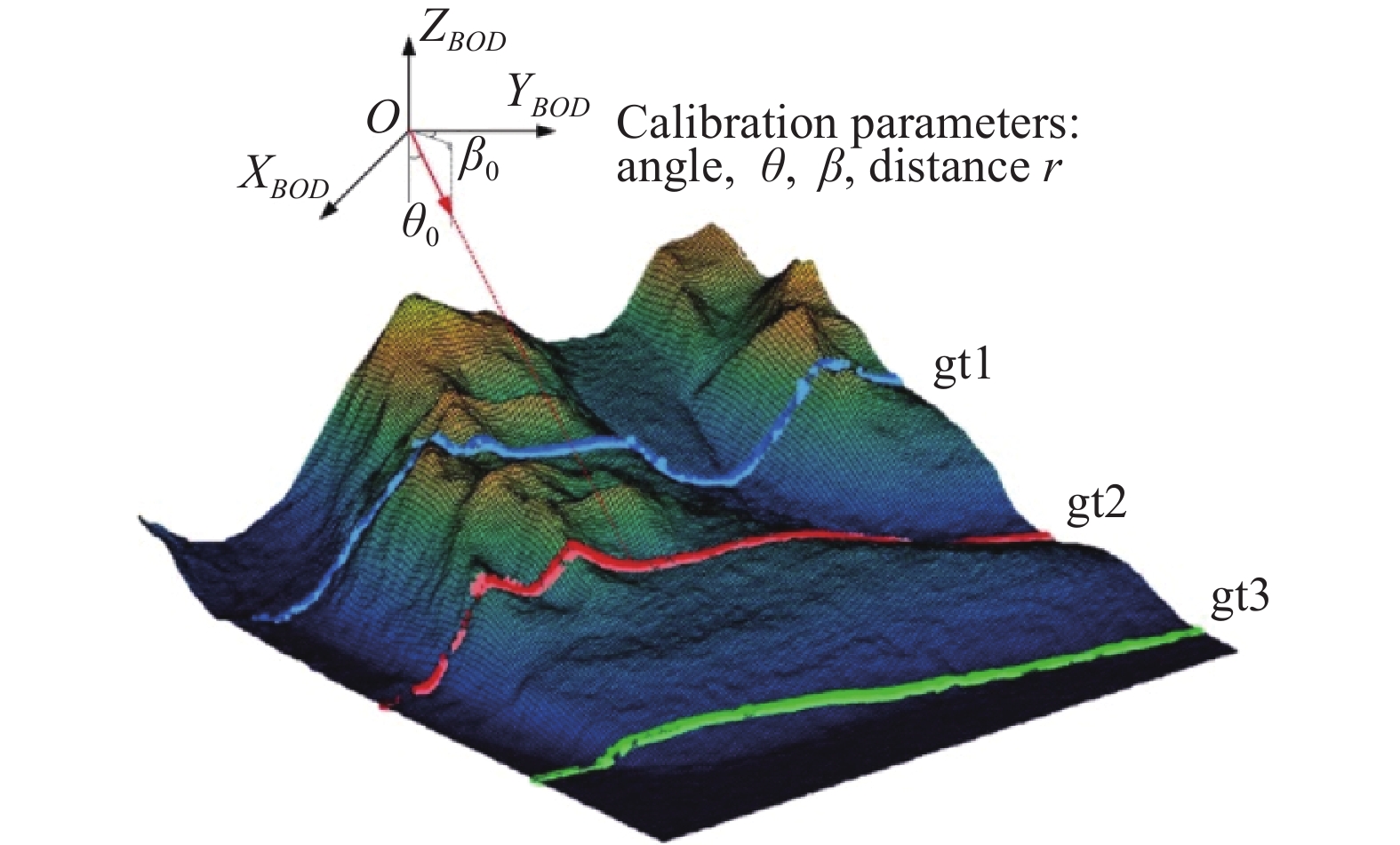
激光测高仪在轨标定与传统光学卫星和机载激光雷达有一定相似之处,主要有基于地面标定场法和基于自然地形法。地面标定场通过激光接收器直接测量足印点,精度最高,但需预估足印点位置并选择合适地点建设标定场。自然地形法通过提前精确测量的局部地形与卫星激光数据进行剖面配准,实现激光定标参数解算。如图3所示,具体解算时,可简化为标定2个角度参数和1个距离参数。有研究表明,使用1 km长度激光测线与高精度地形匹配,角度标定精度优于0.3″,测线长度增加到2.5 km,角度标定精度优于0.1″[22]。此外,ICESat-2还采取了与ICESat相似的策略,在海洋区域进行姿态机动,通过锥形扫描将姿态和距离分开标定,标定后的测距值长期漂移小于1 mm/a[6]。
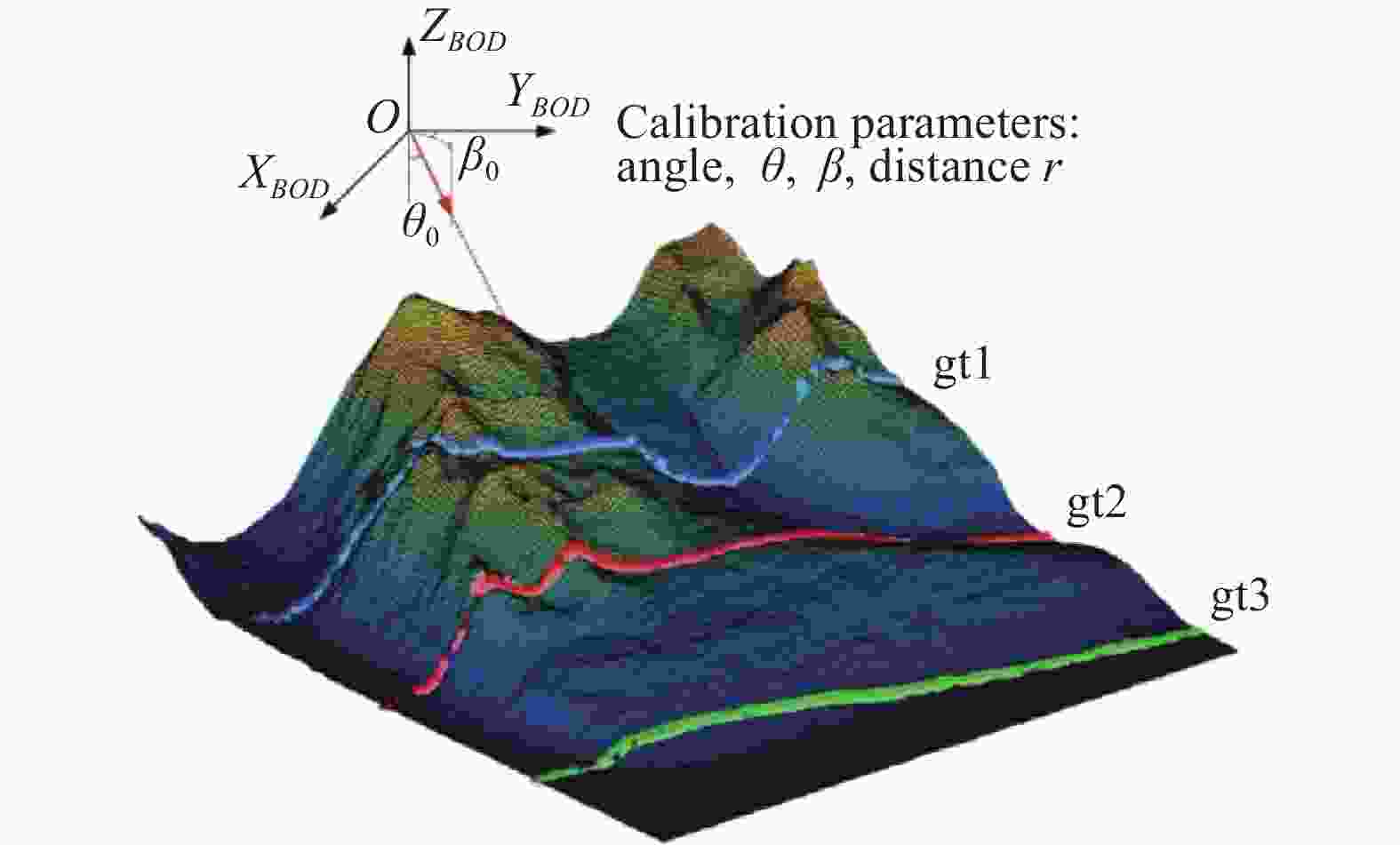
Figure 3. Diagram of laser on-orbit calibration based on localized well-surveyed terrain
-
上一代激光测高卫星ICESat标称定位精度平面约10 m,高程约15 cm。ICESat-2作为后续星,平面定位精度标称6.5 m (后处理),高程方向需满足高程变化监测精度。验证评估ICESat-2点云精度对测绘应用意义重大,主要方法有基于轨迹交叉点数学分析法[23]、与地面实测点比较法、与机载数据比较法和与地面角反射器比较法等。交叉点分析法利用多轨交叉点的高程变化评估数据相对精度,常选择极区冰盖平坦区域。地面实测数据方面,NASA开展了2项地面GPS实地勘测用来检核ICESat-2高程精度,一是在格林兰岛Summit站附近进行的约7 km测线,二是在南极洲南极站以北约224 km的88°纬线(记作88S)附近,测量长度约300 km,与约227条ICESat-2地面轨迹相交。利用2018-2019阶段的88S数据评估结果显示:ICESat-2在极区高程精度为(5±13) cm (均值±
$1\sigma $ )[24]。此外,高程精度与地物类型有关,研究显示在汉中平地区域中误差约为0.59 m[25],在芬兰植被区域高程中误差约为0.85 m[26],因此有理由认为ICESat-2在不同类型陆地区域高程精度优于1 m。地面实测点法仅用作评估高程精度,评估水平精度时可采用角反射器和机载数据。88S测区布设了角反射器,但并未公开报道ICESat-2实际水平定位精度。机载数据检核时常采用精度较高的光学立体或激光雷达作为真值,让ICESat-2剖面点云在水平方向以一定步长移动,计算剖面点云与机载点云高程差绝对值,高程差最小时表示二者配准。如图4所示,汉中区域机载数据的评估结果表明,该试验数据水平偏差为−0.1 m (东)、−4.1 m (北),此处满足标称6.5 m指标。
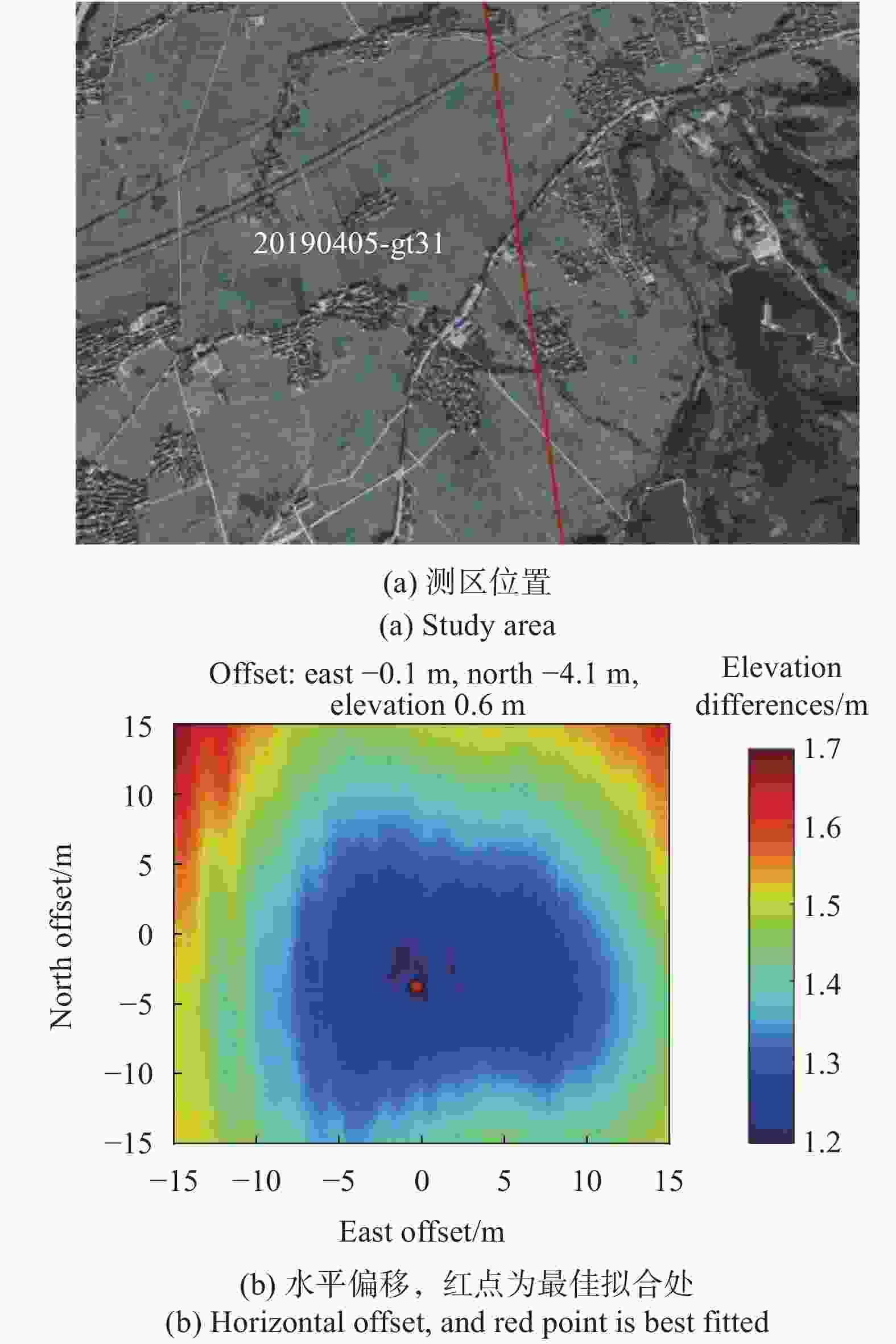
Figure 4. Horizontal accuracy assessment of ICESat-2 using airborne data
-
虽然ICESat-2沿轨点密度大,但由于波束数量限制,波束垂轨间隔达3.3 km,难以直接获取高分辨率地面DSM。将激光测高数据作为高程控制点与光学影像进行联合平差,可以有效提高影像的无地面控制高程精度,具有重要应用价值。激光与影像联合平差在嫦娥一号、火星激光测高MOLA等工程上得到成功应用。ICESat和ZY3-02激光数据也被用作提升影像精度,加入激光测高数据约束后,ZY-3立体影像的无控高程精度得到明显提升,达到优于3 m的水平[10]。
激光辅助光学影像平差首先需要从激光点云中提取控制点,考虑到ICESat-2在沿轨方向点密度较高,可分别在剖面点云和光学影像上进行角点检测,将距离小于阈值的激光角点和光学影像角点作为同名点对,随后将该激光脚点的三维坐标作为控制引入平差方程,达到改善影像定位精度的目标。图5是西安地区资源三号引入ICESat-2联合平差的误差分布图,利用10个ICESat-2点做控制,44个点检查精度,ZY-3影像定位精度(中误差)从平面7.26 m、高程9.23 m提高至平面2.65 m和高程1.37 m。
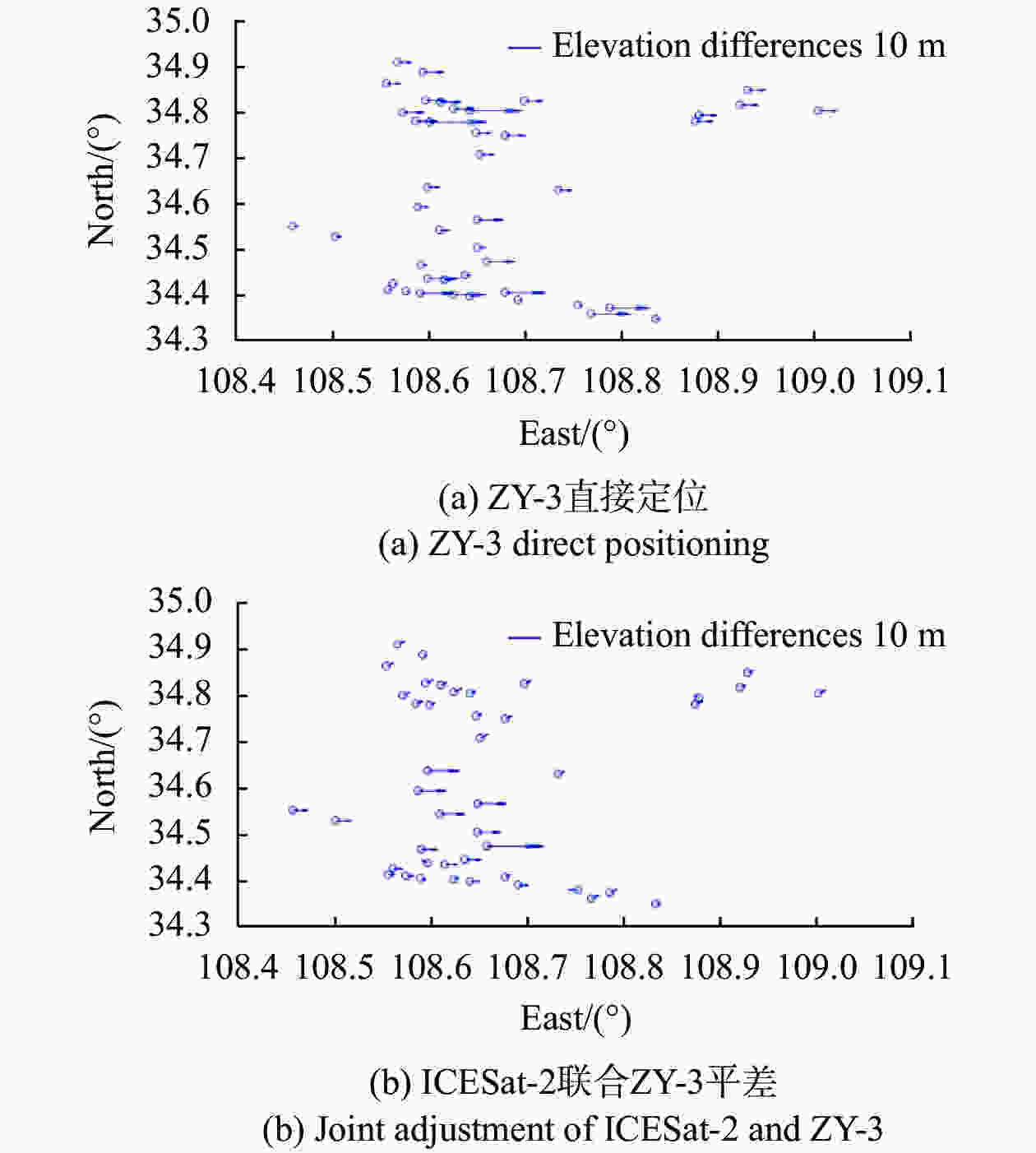
Figure 5. Distribution of elevation residuals before and after ICESat-2 and ZY-3 joint adjustment
-
获得高精度、高分辨率、全球覆盖的数字高程模型(DEM)是航天遥感孜孜以求的目标。现有开源DEM主要包括SRTM (Shuttle Radar Topography Mission)、GDEM (Global Digital Elevation Model)等。GDEM是Terra卫星光学传感器ASTER获取的高程模型,分辨率30 m,覆盖全球约99%陆地表面。SRTM是航天飞机雷达地形测绘产品,最新发布的是30 m分辨率SRTM-1。GDEM和SRTM-1标称高程精度分别为17 m (95%置信度)和16 m (90%置信度)[27]。比较而言,由于光学成像的限制,GDEM存在噪声和数据异常,SRTM精度稳定,但在山区大坡度位置存在数据空缺。
ICESat-2高程精度远高于这两种公开DEM,同时沿轨方向点密度极高,可以将ICESat-2点云当作控制点,纠正开源DEM高程偏差,并填充DEM空白区域。具体处理时要注意坐标系统和高程基准的统一,ICESat-2 ATL03点云坐标系为WGS84,高程值为椭球高,文件提供EGM08 (Earth Gravitational Model 2008)下的高程异常数值(字段/gtx/geophys_corr/geo),可以读取并转化为正高。用ICESat-2评估纠正DEM,可采用人工神经网络算法建立激光点与开源DEM数值映射关系,并开展纠正。通过栅格化、插值(如反距离权重、克里格等)[28]、三角网曲面填充等步骤实现空缺填补。图6是ICESat数据支持下的SRTM-1和GDEM融合填补效果,评估显示GDEM、SRTM-1及ICESat融合处理后精度分别为
$(10.9 \pm 20.2)\;{\rm{m}}$ 、$(5.8 \pm 16.2)\;{\rm{m}}$ 和$(5.7 \pm 14.9)\;{\rm{m}}$ ,ICESat-2理论上融合处理效果更好。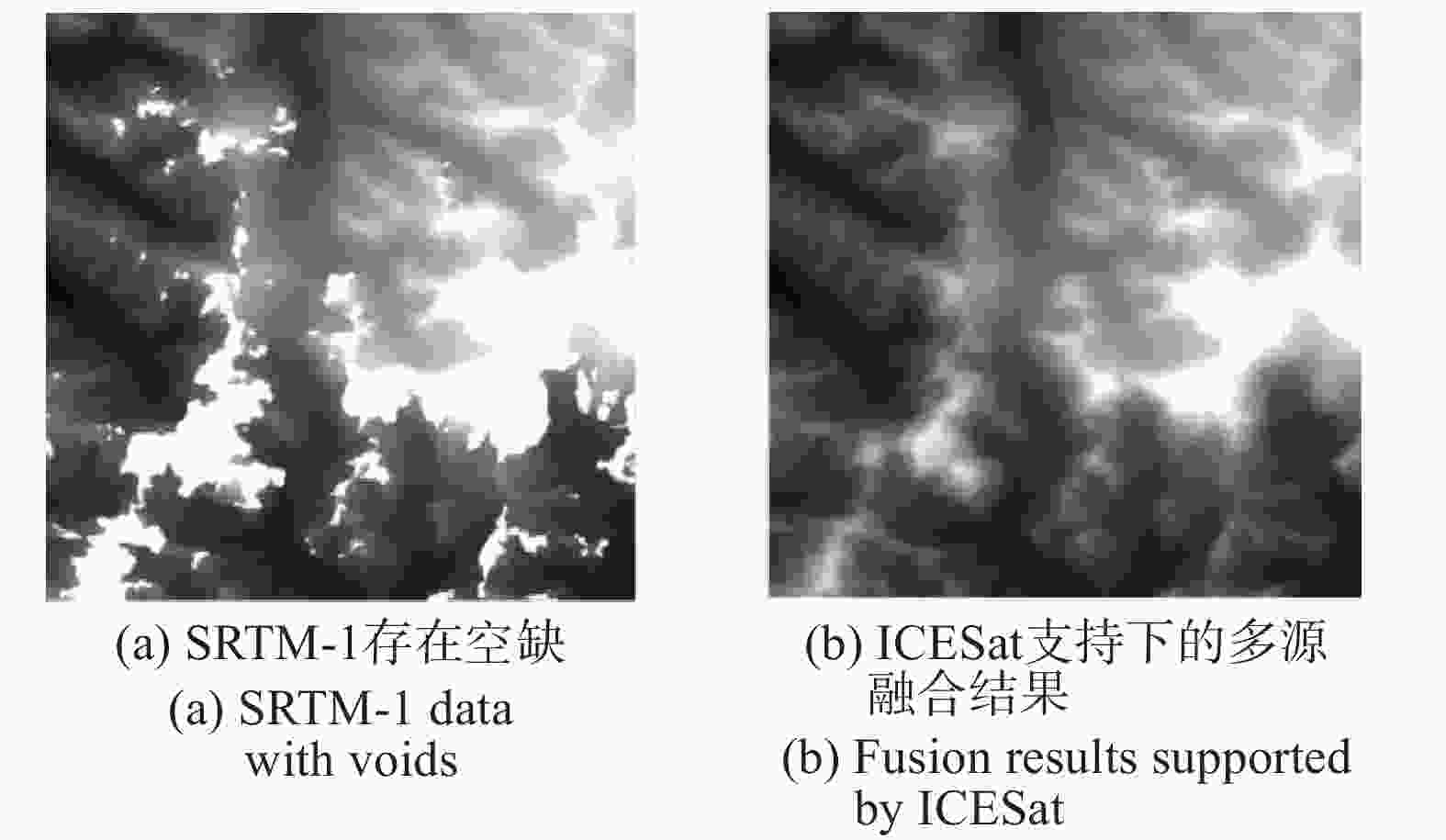
Figure 6. Diagram of multi-source terrain fusion
-
激光雷达能够有效测量植被高度,对反演地上生物量,理解全球碳循环、生态系统变化至关重要。GDEI (见表1)、ICESat和ICESat-2等航天激光雷达具备全球植被高度测量的能力,但GDEI仅能采集南北纬52°范围内数据,ICESat、ICESat-2工作范围更广,能直接测量北方森林高度和分布[26]。
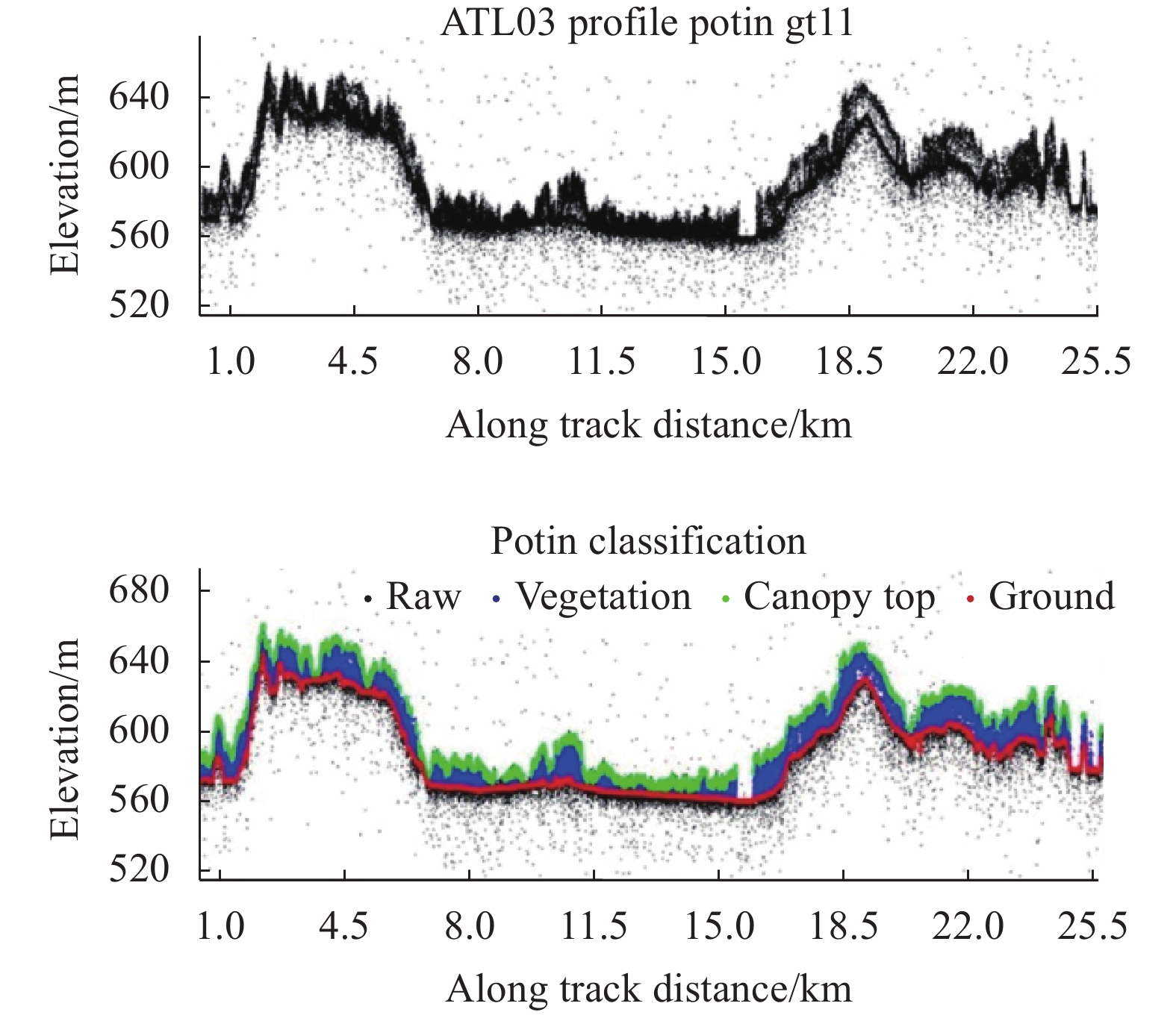
ICESat-2提取冠层高度面临两大问题:一是热带地区植被茂盛,冠层会遮挡大部分激光能量,使得光子无法到达地面;二是北方地区植被稀矮,冠层和地面区分度降低[26]。处理时需尽可能选择夜间强光束数据,不仅太阳光背景噪声更少,植被区域气溶胶导致的条带状噪声也大大减少。对剖面点云去噪处理后,采用中值滤波,循环数次即可获得冠层顶部点、冠层点和地面点,从而计算植被高度(如图7所示)。ATL08文件中提供的植被高度参数为h_canopy_abs,定义为参考椭圆上方冠层高度98%位置。从评估结果来看,植被测量高度中误差达到3.69 m,但总的来说还存在对高植被估计偏低,对低植被估计偏高的问题[19]。需指出,受限于工作高度,ICESat-2不可能像机载激光雷达那样获得精细的森林参数,在计算植被覆盖率、地上生物量等参数时激光和影像的联合处理更加准确有效[29]。
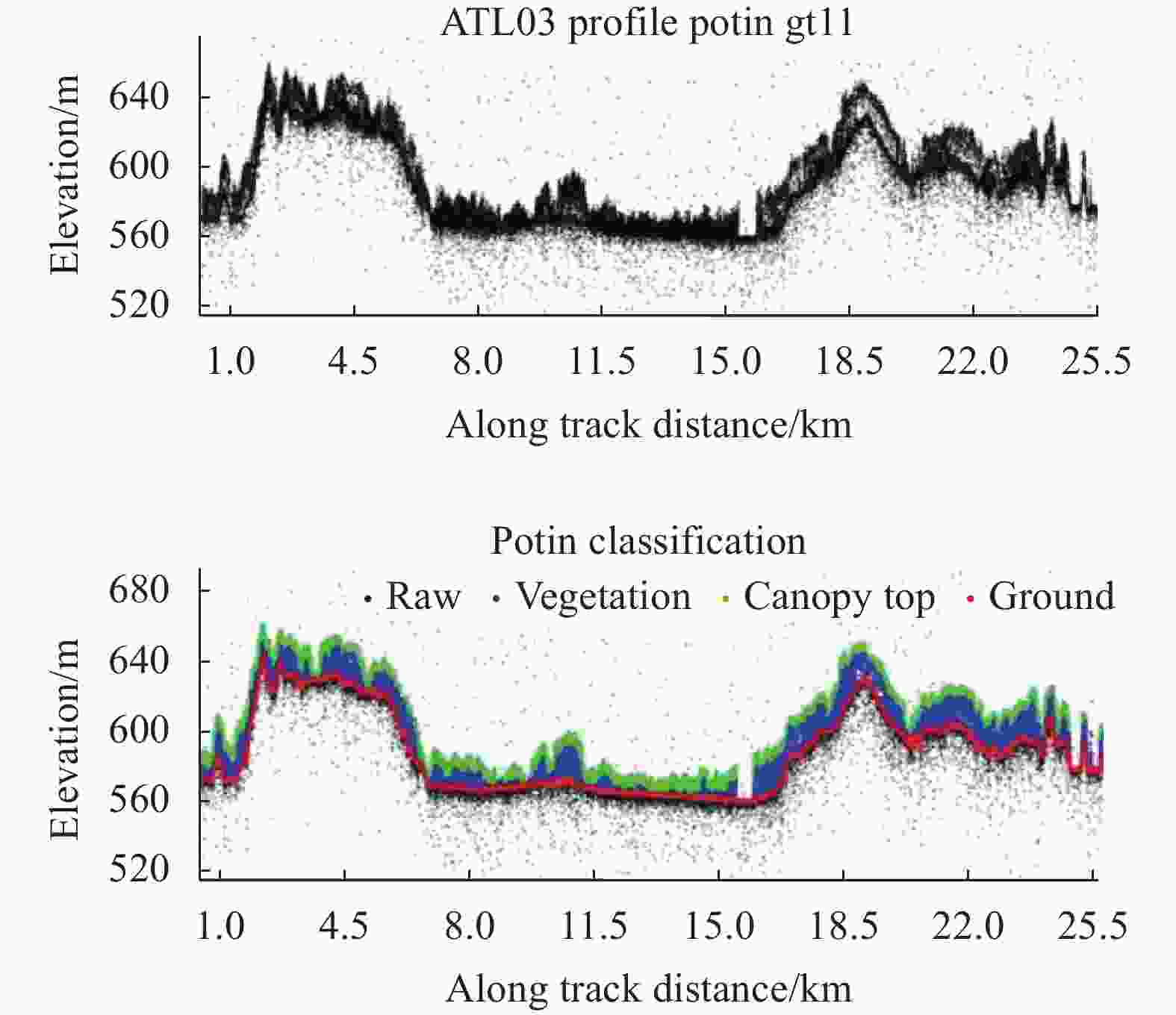
Figure 7. Diagram of canopy height calculation based on ICESat-2 point clouds
-
浅海水深是海洋工程建设、海洋环境研究等众多应用必须的基础地理数据,精确高效地获取浅海水深是海洋测绘领域的难点和热点。目前主要的手段包括船载声呐、机载激光雷达、光学遥感、双介质摄影测量等[30]。机载激光雷达测深系统近年来发展较为成熟,利用532 nm激光透水性,采用线性探测的大功率激光器和全波形采样,能够获得高精度高分辨率水下地形,测深精度基本在15 cm左右(与水质、底质类型有关),基本达到船载声呐的精度水平,但机载激光雷达的经济性仍有待提高。
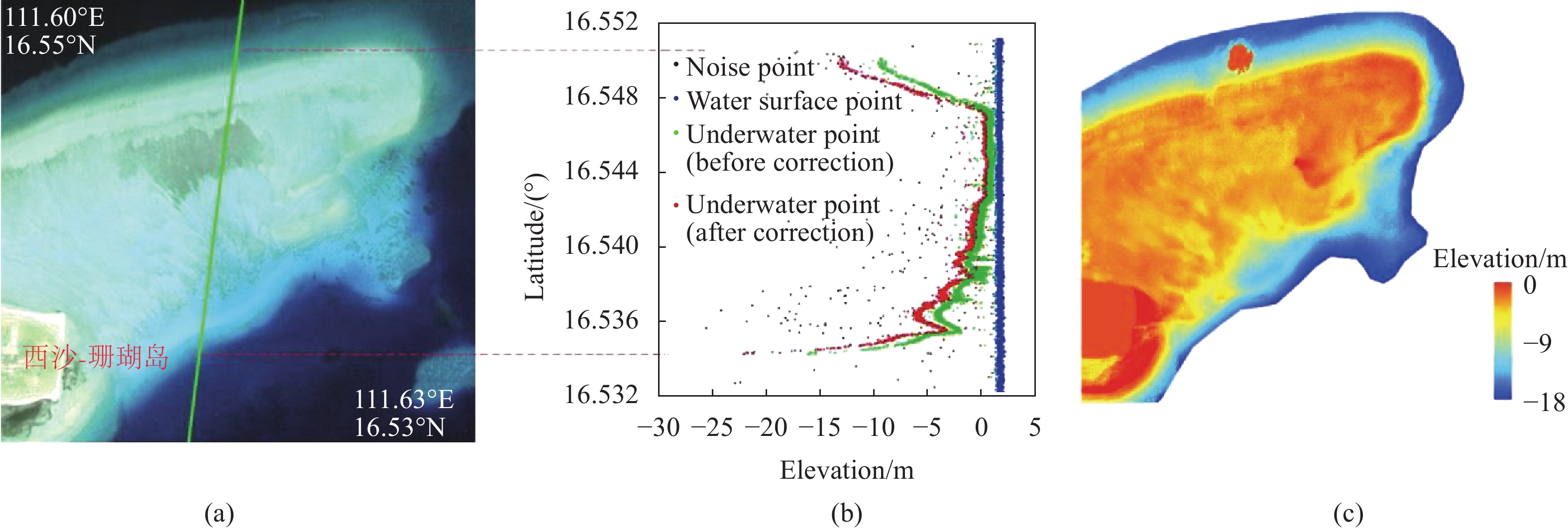
激光传播要经历大气-水体-大气的复杂过程,由于水体衰减,返回的激光能量大幅减弱,卫星平台探测浅海水深在线性探测激光阶段是难以实现,而光子计数激光雷达的超高灵敏度使之成为现实。MABEL(ICESat-2原理样机)的机载实验结果显示激光测深深度达到8 m,中误差0.7 m[31];ICESat-2数据发布后,分析显示最大测深深度可达40 m,中误差在0.43~0.6 m范围[32]。图8是利用ICESat-2在我国西沙珊瑚礁开展的与WorldView-2光学影像联合进行的测深试验,精度为
$(0.23 \pm 0.98)\;{\rm{m}}$ 。需指出:ICESat-2发布的标准产品中没有浅海水深,即ATL03点云的高程值没有考虑水体折射,实际应用时需要开展针对性的去噪、折射改正、水面/水下分离、水深计算等;同时由于ICESat-2波束垂轨间距大,很多远海岛礁都没有测线经过,在一定范围内进行激光与影像联合处理,开展水体反演参数移植,对于缺乏直接主动测深值的区域是较为可行的方法。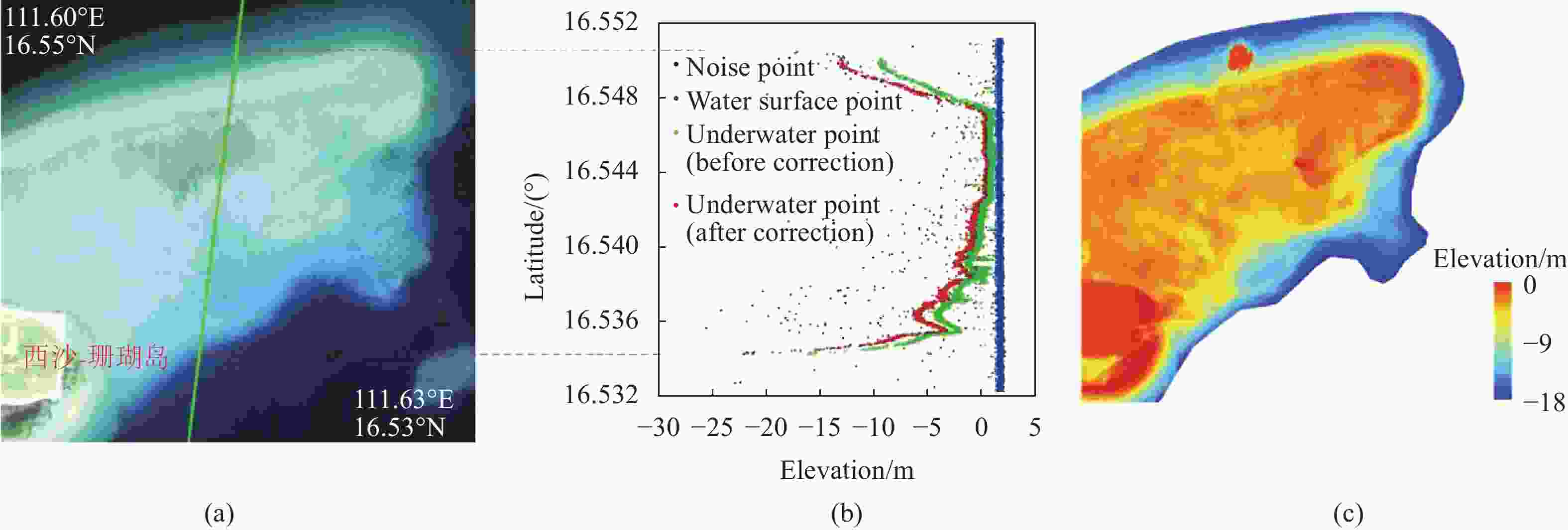
Figure 8. Schematic diagram of ICESat-2 shallow bathymetry. (a) Geographical location of Xisha Coral Island; (b) ICESat-2 photon profile point cloud and refraction correction effect; (c) Shallow water deep pseudo-color map
-
激光测绘卫星以全天时、高精度、高效率的显著优势已经成为对地三维观测新的重要手段,对于全球高精度控制数据获取、特殊区域精确地理空间信息采集、大范围全球性科学问题研究等都具有十分重要的意义。随着美国ICESat-2卫星的发射升空和成功应用,对地观测激光雷达卫星向着光子计数、多波束、高精度方向的发展趋。笔者认为,我国在发展下一代激光测绘卫星时,既要充分借鉴ICESat-2技术的优势,也要进一步突出测绘应用需求。一是突出地表精确控制测量数据的获取能力,充分利用激光卫星观测数据高程精度高的特点,快速构建全球范围高程控制数据库,有效提升我国测绘卫星成图精度和多源地理信息融合处理水平;二是突出特殊区域数字表面模型获取能力,对极地、浅海等困难区域,发挥星载激光雷达对地观测优势,快速获取极地区域基础地理信息、浅海地形地貌信息,填补我国在相关区域对地观测能力空白;三是加强多元对地观测数据融合处理能力,激光观测数据具有精度高的特点,但在分辨率上较被动光学、微波观测数据明显要低,同时缺乏较为丰富的光谱特征信息,发展智能融合处理技术将是实现更高对地观测精度、更高信息表达精细程度、更为丰富特征信息水平的必然方向。激光测绘卫星已在全球三维信息获取方面体现出独特优势,进一步的发展将要求具有更多波束数量提高测量效率,更准确的姿态控制提高测绘精度和更智能的数据处理提高应用效率,这为星上载荷、卫星平台和观测数据处理技术系统都带来极大挑战,需要进一步加大研究力度。
Development and application of lidar mapping satellite
doi: 10.3788/IRLA20201044
- Received Date: 2020-09-15
- Rev Recd Date: 2020-10-13
- Publish Date: 2020-11-25
-
Key words:
- laser altimetry satellite /
- ICESat-2 /
- data processing /
- surveying and mapping application
Abstract: The rapid development of laser altimetry satellite has a great impact on the traditional satellite earth observation field. The accurate elevation data can effectively compensate the lack of optical satellites, while laser altimetry satellite data processing and mapping applications are worthy of attention. Firstly, the principle and characteristics of laser altimetry satellite was introduced, and the its development history was presented. Then, the current on-orbit LiDAR satellite ICESat-2 was focued on, which had a high degree of attention. The satellite configuration characteristics and data processing methods were discussed, and its surveying and mapping capabilities in many fields, such as image joint adjustment, multi-source terrain fusion, global vegetation survey, and shallow water bathymetry et al. were analyzed and revealed. Finally, some thoughts about the development and construction of laser altimetry satellite in China were shared.









 DownLoad:
DownLoad: