






HTML
-
激光雷达(Lidar)作为一种主动式光学遥感探测技术,在空间分辨率、探测灵敏度、抗干扰能力及实时监测等方面具有独特的优势,广泛应用在航空航天、地理测绘、三维建模、大气环境监测、海洋遥感、自动驾驶等领域。根据探测原理,激光雷达技术可分为调频连续波法、脉冲测距法、连续波相位法、三角测距法等。其中,基于飞行时间(Time-of-flight)原理的脉冲式激光雷达技术应用最为广泛。脉冲式激光雷达的基本原理是向外界发射短脉冲(比如纳秒量级)激光,并收集由待测目标(如建筑物、大气分子等)散射或反射的光信号,最终由高灵敏度光电探测器(如光电倍增管等)以时间分辨的方式实现距离分辨的回波信号探测[1]。通过分析回波信号的强度、频率、偏振等信息,可提取待测目标的诸多物理特性。
在大气遥感领域,基于飞行时间原理的脉冲式激光雷达技术可实现大气气溶胶、温度、风速、温室及污染气体分布的有效探测,测量范围从几公里到100 km不等,在大气辐射、大气化学、大气污染监测、天气预报及气候模式研究等方面发挥着不可或缺的重要作用。2014年,瑞典隆德大学研究小组提出了一种基于沙氏成像原理(Scheimpflug imaging principle)的新型沙氏激光雷达(Scheimpflug lidar,SLidar)[2-3]技术。通过对发射到大气中的激光光束在满足沙氏成像原理的条件下进行清晰成像,以角度分辨的方式获得距离分辨的大气后向散射信号。基于该原理,SLidar技术可采用连续光激光器(如高功率二极管激光器)作为光源以及二维图像传感器作为探测器,从而简化了激光雷达系统结构,大大降低了系统成本,同时也缩短了近距离探测盲区。近年来的研究工作表明,沙氏激光雷达技术在大气环境监测领域具有重要的应用价值。另一方面,基于沙氏成像原理而发展起来的激光雷达技术也逐渐被应用于水体光学参数测量、荧光激光雷达、三维成像、燃烧诊断等诸多领域。文中将重点阐述基于沙氏成像原理的激光雷达技术的基本原理,并系统性地介绍其在不同领域的研究及应用进展。
-
沙氏成像原理(也称沙姆定律)是一种光学成像原理,主要描述如何通过调整光学镜头相对于探测器平面的倾斜从而获得较大的成像景深。其原理可简述为:在成像系统的物面与光学透镜不平行的情况下,如果像面、物面及透镜所在平面三者相交于一条直线,则依然可对物面清晰成像。沙氏成像原理的优点在于采用大口径的光学成像系统的同时,依然可实现理论上的无穷远景深。这一重要特点对于探测微弱回波信号的激光雷达系统而言十分重要。
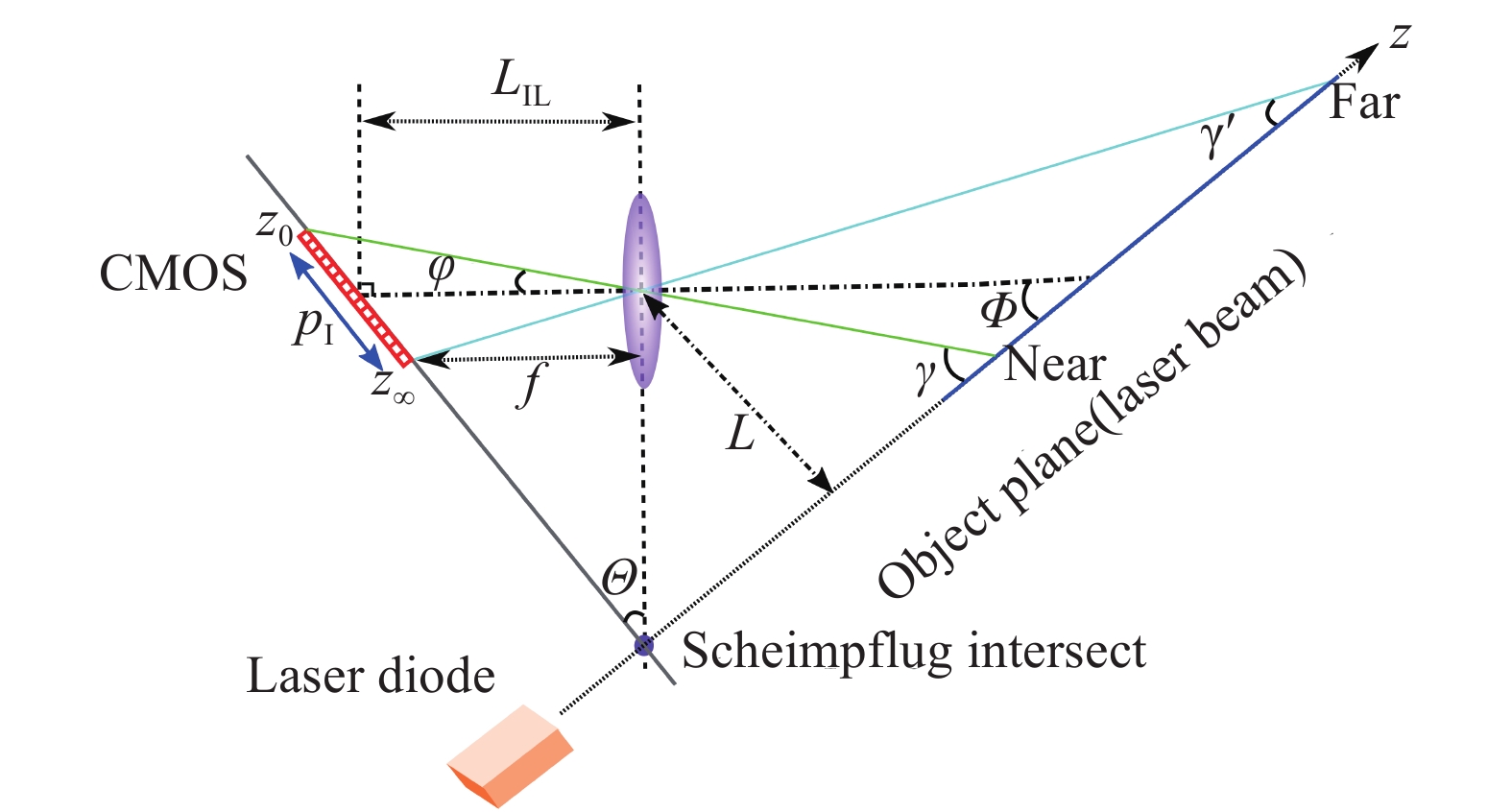
如图1所示,沙氏激光雷达一般以连续光(强度调制)二极管激光器作为系统发射光源,利用倾斜放置的面阵图像传感器探测待测目标的后向散射光。在满足沙氏成像原理的条件下,不同距离上的后向散射(反射)光会以不同入射角度会聚到图像传感器上,实现对探测目标(光束)的清晰成像。由于不同的像素对应着不同的入射光线及测量距离,沙氏激光雷达技术以角度分辨的方式实现了距离分辨的后向散射信号探测。由于采用半导体激光器作为光源及工业相机作为探测器,沙氏激光雷达具有系统光源和光电探测部分相对简单、稳定,探测盲区小及性价比高等特点。
Figure 1. Optical layout of the Scheimpflug imaging principle.
$f$ is the focal length of the receiving telescope根据几何光学原理,可推导出沙氏激光雷达技术的图像传感器像素与测量距离(z)之间的关系式:
式中:
$\varTheta $ 为像面相对于成像透镜的倾角;$\varPhi $ 为接收望远镜的观测角;$L$ 为接收望远镜与发射望远镜光轴之间的间隔;${p_{\rm{I}}}$ 为每个像素单元在成像平面上的位置,可表示为${p_{\rm{I}}} = ({N_{\rm{p}}}/2 - {n_{\rm{p}}}){w_{\rm{p}}}$ ,其中${N_{\rm{p}}}$ 为总像素个数,${n_{\rm{p}}}$ 为每个像素元的索引,${w_{\rm{p}}}$ 为像素大小。对公式(1)进行微分,可得到距离分辨率与探测距离的关系表达式:图2给出了不同系统配置参数的沙氏成像系统的像素-距离、距离-分辨率关系曲线。从图中不难看出,图像传感器的像素与测量距离之间存在着非线性关系,并且激光雷达系统的距离分辨率与测量距离的平方成线性关系。因此,沙氏激光雷达系统的近距离分辨非常高,而远距离分辨率则会迅速下降。如图2(b)所示,当接收望远镜焦距为800 mm,发射与接收系统之间的间隔约为806 mm时,沙氏激光雷达系统在1 km范围内的分辨率优于6 m,在100 m附近的距离分辨率甚至可达到cm量级。在实际应用时,由于观测角较小,难以直接测量,因而无法直接利用公式(2)求解像素-距离关系。因此,一般通过测量距离已知的目标物体回波信号像素位置来校准像素-距离关系[4]。
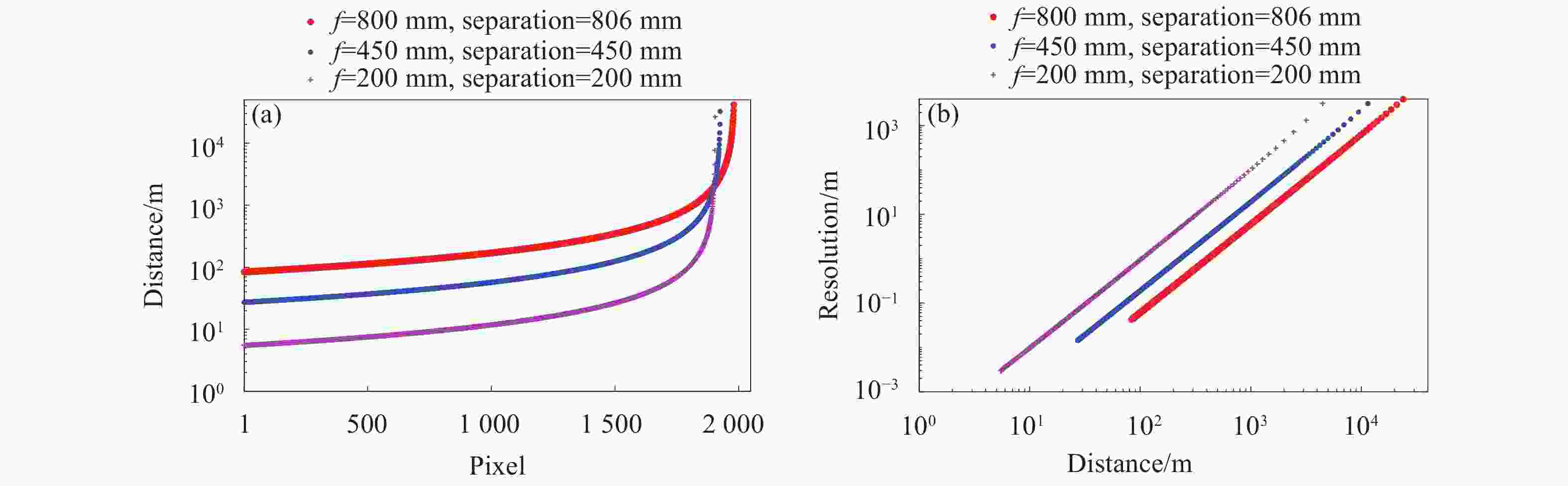
Figure 2. (a) Relationships between the pixel and the measurement distance with different optical configurations; (b) Relationship between the range resolution and the measurement distance. System parameters: f is the focus of the receiving telescope, separation refers to the distance between the transmitter and the receiver, pixel width: 5.5 µm, pixel number: 2048×1024,
$\varTheta = {45^ \circ }$ 需要强调的是,图2(b)所示的距离分辨率没有考虑激光光束的宽度,此时距离分辨率只受沙氏成像原理约束。在实际应用中,受光束准直系统等因素的限制,激光光束总是有一定宽度,从而会影响系统的有效距离分辨率,尤其是远距离探测性能[5]。根据实际情况,应尽可能地压缩发射光束的发散角,使得激光光斑在探测距离内尽可能的小。
-
基于上述原理,通过对发射到大气中的激光光束(强度调制)在满足沙氏成像原理的条件下利用图像传感器进行成像,可实现从近地面到数公里范围内的大气后向散射信号的有效探测,从而获取大气气溶胶在不同距离(高度)的分布信息。根据传统脉冲式大气激光雷达方程以及距离分辨率与探测距离之间的关系,可推导出SLidar技术的大气激光雷达方程:
式中:
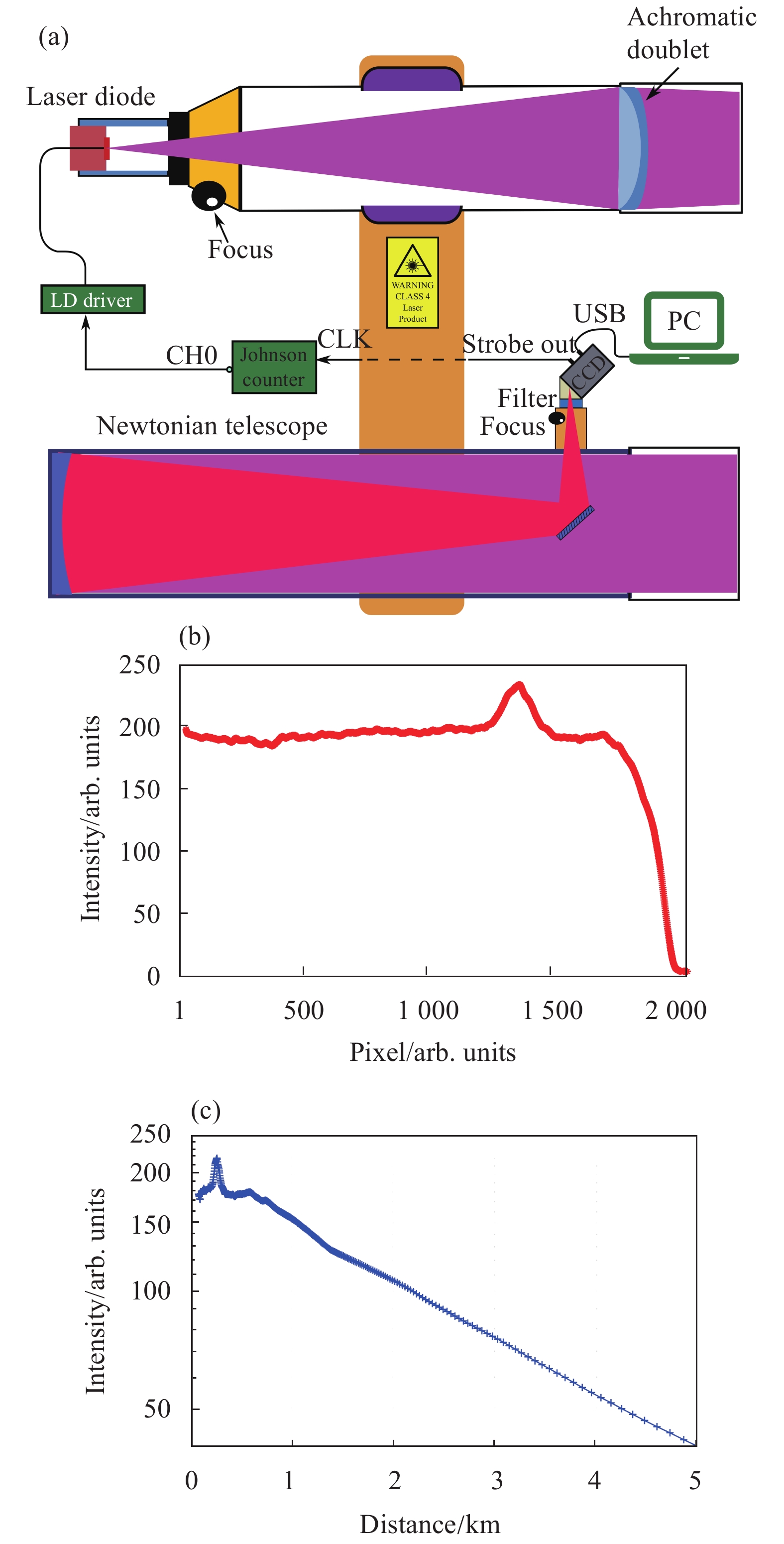
$\lambda $ 为激光发射波长;${\textit{z}}$ 为探测距离;K 为系统常数;${P_0}(\lambda )$ 为激光器的输出功率;$O({\textit{z}})$ 为几何重叠因子(在SLidar系统中,使用面阵图像传感器时通常为1);$\;\beta (\lambda ,{\textit{z}})$ 为大气的后向散射系数;$\alpha (\lambda ,{\textit{z}})$ 为大气消光系数;$P(\lambda ,{\textit{z}})$ 为SLidar系统探测的大气后向散射信号。从公式(3)可以看出,SLidar测量的激光雷达信号不随距离平方衰减。因此,虽然SLidar系统的远距离分辨率有所下降,但是远距离信号的信噪比不随距离平方衰减,在不使用单光子计数等高灵敏度探测技术的情况下依然可探测最远7 km左右的大气后向散射信号。典型SLidar系统如图3(a)所示。SLidar系统采用高功率、多模、连续波二极管激光器和面阵CMOS/CCD图像传感器作为光源和探测器。二极管激光器通过温控驱动和恒流驱动分别对激光器的工作温度和电流进行精确的控制。二极管激光器通过驱动电流进行开/关调制,该驱动电流与CMOS图像传感器的触发信号同步。因此,大气背景信号及激光光束的后向散射信号交替成像在CMOS图像传感器的探测区域中。通过对图像在垂直方向上的像素进行累加,扣除大气背景信号[5],并对多次测量得到的激光雷达信号进行中值平均,可获得像素-强度的大气回波曲线。通过参考目标校准测量并将图像传感器的像素转换成距离,最终可获得距离-强度的大气激光雷达信号。

Figure 3. (a) Architecture of the Scheimpflug atmospheric lidar system based on a Newtonian telescope; (b) Typical pixel-intensity lidar signal; (c) Range-intensity lidar signal transferred by pixel-range lidar signal
SLidar在使用图像传感器对大气后向散射光进行探测时,不可避免地受到背景光散粒噪声以及图像传感器的暗电流噪声、读出噪声和固定模式噪声(FPN)的影响。研究发现,背景光散粒噪声和图像传感器的光子响应不均匀性(PRNU)噪声是测量信号的主要噪声来源。由于沙氏激光雷达像素-距离的非线性关系,一般通过分析近距离(100~150 m)连续200个像素点的信号来评估激光雷达信号的整体噪声水平。把近距离局部信号的多项式拟合残差作为噪声信号,该残差信号的标准差即为激光雷达信号的噪声水平。不同距离的信噪比可通过该距离上的信号强度与噪声的比值来估计,由此可评估激光雷达信号的质量。在白天强背景测量条件下,大气回波信号主要受太阳背景噪声影响。在空气质量良好的条件下,经过短曝光(比如20 ms)以及1~10 min的信号平均后,白天最远可获得7 km左右的探测距离(信噪比>10)。在夜间测量条件下,可通过增加曝光时间(比如500 ms),提升入射光通量,从而抑制PRNU噪声,经过同等时间的信号平均后,探测性能一般优于白天。为了进一步提升SLidar测量信号的信噪比,提高消光系数反演可靠性,可利用Savitzky-Golay等数字滤波器对激光雷达信号进行数字滤波,一般可获得3~10倍的信噪比提升效果[6]。为了避免过度滤波导致的信号失真(比如由云层或污染源导致的强回波失真),可通过傅里叶变换在频域分析滤波残差的方式动态优化Savitzky-Golay滤波器的窗口宽度[7],在保证信号无失真的情况下实现最大的信噪比改善效果。
-
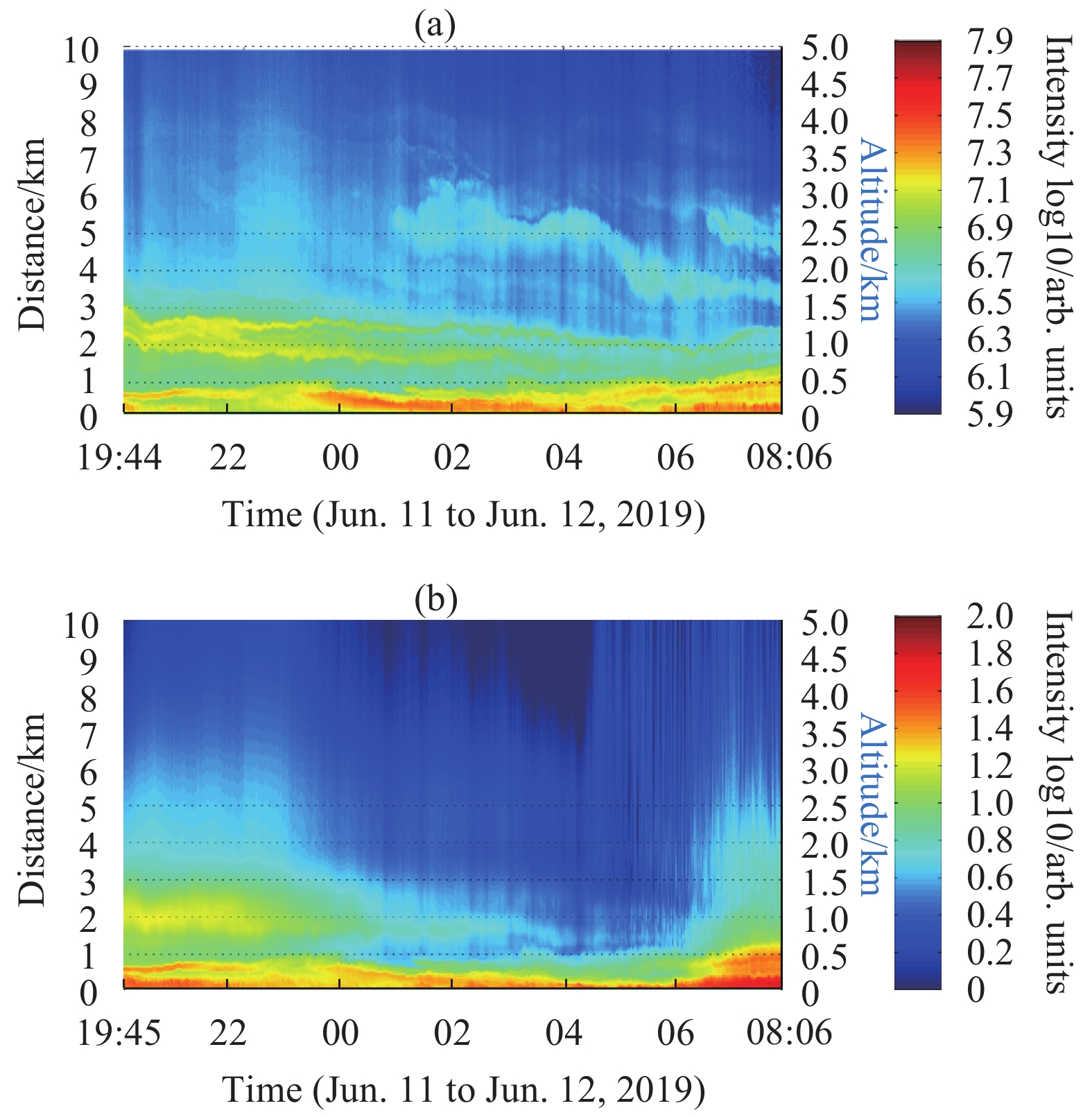
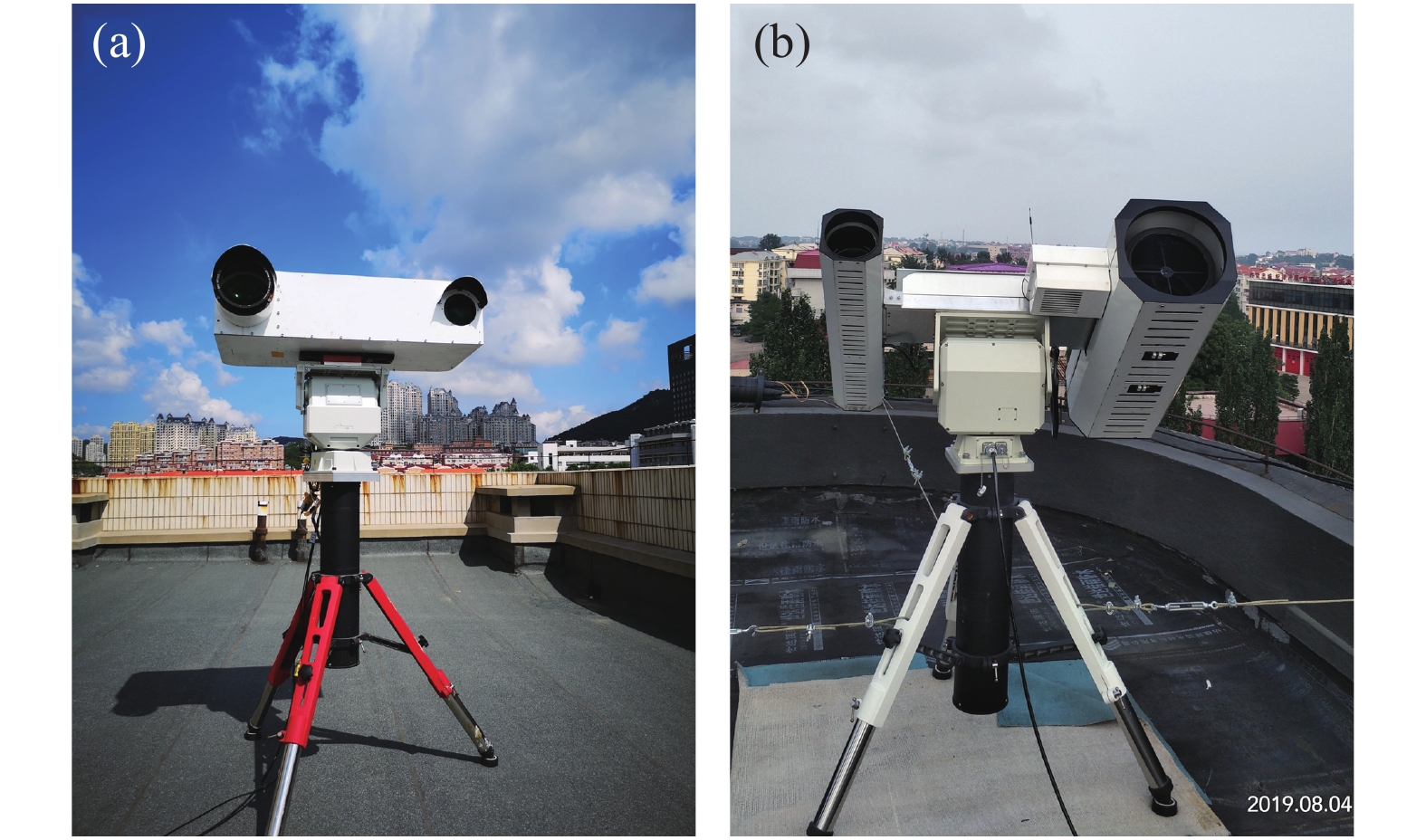
SLidar技术与脉冲式大气激光雷达技术的探测原理显著不同,为了研究SLidar技术测量的大气回波信号的特点,大连理工大学利用自主研制的SLidar系统和脉冲式大气激光雷达系统开展了详细对比研究[8]。图4是SLidar系统和脉冲激光雷达系统对比测量实验实物图。SLidar系统采用520 nm二极管激光器(功率约1 W),脉冲激光雷达系统采用工作波长为532 nm的Nd:YAG激光器。由于两套系统工作波长接近,在对比分析时可假定大气在两个波长的吸收和散射特性一致。在水平测量(系统仰角均为3˚)对比研究中,SLidar和脉冲激光雷达反演的消光系数表现出了相似的时间演变特征,平均消光系数的相关性达到0.99。在30˚仰角倾斜测量对比研究中(如图5所示),在0.5~2 km的范围内SLidar激光雷达曲线和脉冲激光雷达曲线之间的相对均方根误差小于5%。利用SLidar技术探测盲区小的特点,还可对脉冲式大气激光雷达的近距离几何重叠因子进行修正,可实现从近地面(90 m)到28 km的大气回波信号的有效探测[9]。

Figure 4. (a) Measurement geometry, (b) physical diagram of the pulsed lidar system, and (c) physical diagram of the Scheimpflug lidar system. The rain-proofed SLidar system was placed on the rooftop while the pulsed lidar system was located inside a laboratory
在沙氏大气激光雷达技术中,为了满足沙氏成像原理从而获得最大的成像景深,一般会将图像传感器倾斜(比如45˚)放置。由于图像传感器表面微透镜及制造工艺等问题,大多数图像传感器的量子效率会随着入射光的入射角度增加而急剧下降[10-12],部分图像传感器45˚倾斜放置时的量子效率只有正入射时的20%左右。为了探讨沙氏成像与传统成像模式测量结果的差异,2019年大连理工大学课题组搭建了由两个型号一致的图像传感器(Lumenera, Lt225)构成的大气激光雷达系统[13]。该系统采用808 nm二极管激光器作为发射光源,采用200 mm口径的牛顿望远镜(f=800 mm)收集后向散射光,并通过0°和45°倾斜放置的CMOS图像传感器同时探测大气后向散射信号。研究结果表明,0°倾角探测时图像传感器具有较高的量子效率。因此,在同等测量时间内(45 s),白天测量时0˚倾角放置的图像传感器测得的激光雷达信号的信噪比显著高于45˚倾斜放置时回波信号信噪比(3.5~5.5倍)。然而,由于不满足沙氏成像原理,成像景深受到极大限制。0˚倾角图像传感器探测时,成像系统的失焦效应会引起不同距离的激光雷达信号的串扰,在近距离探测时尤为明显。通过对比发现,0˚倾角放置的图像传感器在100 m处测量得到的大气激光雷达信号及消光系数比45°倾斜放置时测量结果要高出约11%,这也说明了满足沙氏成像原理对高精度大气遥感探测十分重要。另一方面,增大接收望远镜的焦比(比如减小口径),可一定程度上降低0˚倾角探测时失焦效应的影响,但其改善效果还有待深入研究。

Figure 5. Time-range evolution maps of range-corrected log-scale lidar signals measured by (a) the pulsed lidar system and (b) the SLidar system while slope measurement from 11th June 2019 to 12th June 2019. The elevation angle was about 30˚
-
单波长激光雷达是大气遥感领域应用最为广泛的大气激光雷达技术。利用单波长大气激光雷达可实现大气气溶胶时空演变特征探测、大气消光系数、能见度反演研究等。2014年,瑞典隆德大学最早实现了单波长沙氏大气激光雷达技术并开展了大气气溶胶遥感探测实验研究工作[14]。该系统采用808 nm高功率二极管激光器作为光源,利用半高全宽(FWHM)为3 nm的窄带干涉滤光片滤除大气背景光,实现了大气回波信号的探测,并对SLidar技术的激光雷达方程及距离分辨率等问题进行了探讨,初步论证了SLidar技术在大气气溶胶探测方面的可行性。2017年,大连理工大学课题组利用输出功率约为4 W的808 nm二极管激光器和CMOS图像传感器搭建了一套808 nm全天时单波长米散射SLidar实验系统,并在近地面近似水平方向开展了24 h连续实验测量研究工作[4],如图6所示。该系统的探测盲区约为85 m,最远探测距离可达7 km (信噪比>10)。即使在中度污染天气条件下,大气消光系数的反演距离也能达3~4 km左右。由于远距离分辨率迅速下降,在反演大气消光系数时,边界值的求解一般只针对7 km以内的大气激光雷达信号。通过基于道格拉斯-普克算法的斜率法在远端求解消光系数边界值,并根据大气条件获得激光雷达比经验值,可实现大气消光系数时空分布反演。实验结果表明,利用SLidar技术测量得到的大气消光系数与传统点式监测站测量得到的PM2.5和PM10浓度之间存在较高的相关性。这一研究工作为沙氏大气激光雷达在大气环境监测领域的实际应用奠定了重要基础。
另一方面,得益于近年来迅速发展的半导体激光器技术,沙氏大气激光雷达的波长选择范围非常广。通过选择不同波长的二极管激光器,可实现从紫外到近红外1550 nm波段不同波长的沙氏大气激光雷达系统。近年来,大连理工大学课题组相继实现了407 nm[15]、450 nm[16]及520 nm[17]的SLidar系统,并在绝大多数测量条件下实现了全天时大气遥感探测,为不同应用场景的测量及多波长系统的实现提供了重要参考。在450 nm和520 nm波段目前采用的滤光片带宽为10 nm,因此如果采用1~3 nm的干涉滤光片还可大幅提升白天测量信号的信噪比。为了满足小范围大气遥感测量需求,中国科学院安徽光学精密机械研究所以及大连理工大学等单位开展了小型化沙氏大气激光雷达技术研究工作。2019年,中国科学院安徽光学精密机械研究所孙国栋等人提出了一种532 nm小型化沙氏激光雷达,该激光雷达能够检测到离地面1 km处的气溶胶消光系数和垂直大气透射率[18]。通过将测得的气溶胶消光系数与传统的脉冲式激光雷达进行比较,验证了小型化SLidar系统探测边界层内气溶胶的可行性,但该系统难以实现全天时大气遥感探测。2020年,大连理工大学课题组研制了一套可进行户外全天时大气测量的小型化808 nm沙氏激光雷达系统,并对系统性能进行了详细的评估[19]。
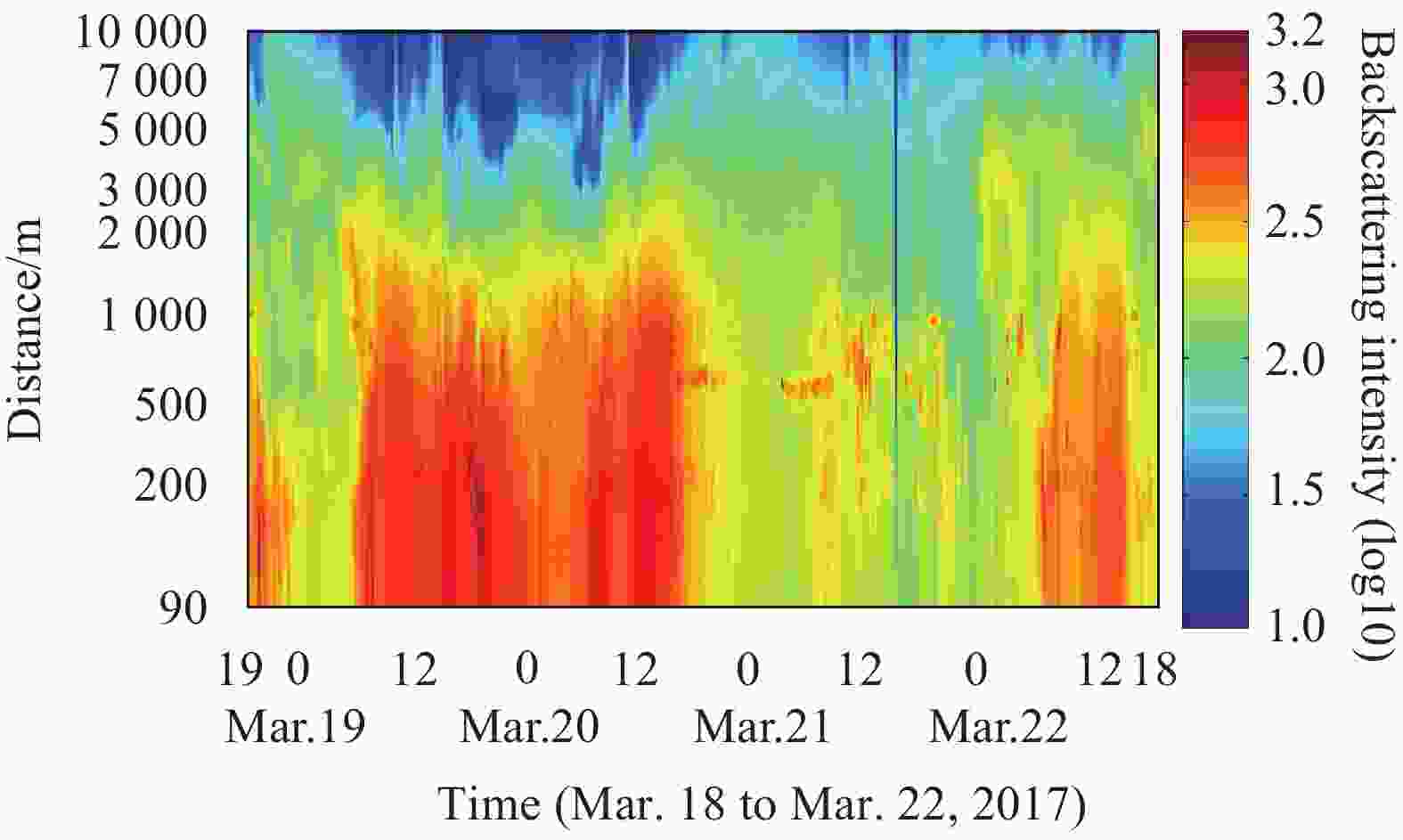
Figure 6. Time-space evolution map of the atmospheric backscattering signals measured by an 808 nm all-day SLidar system
-
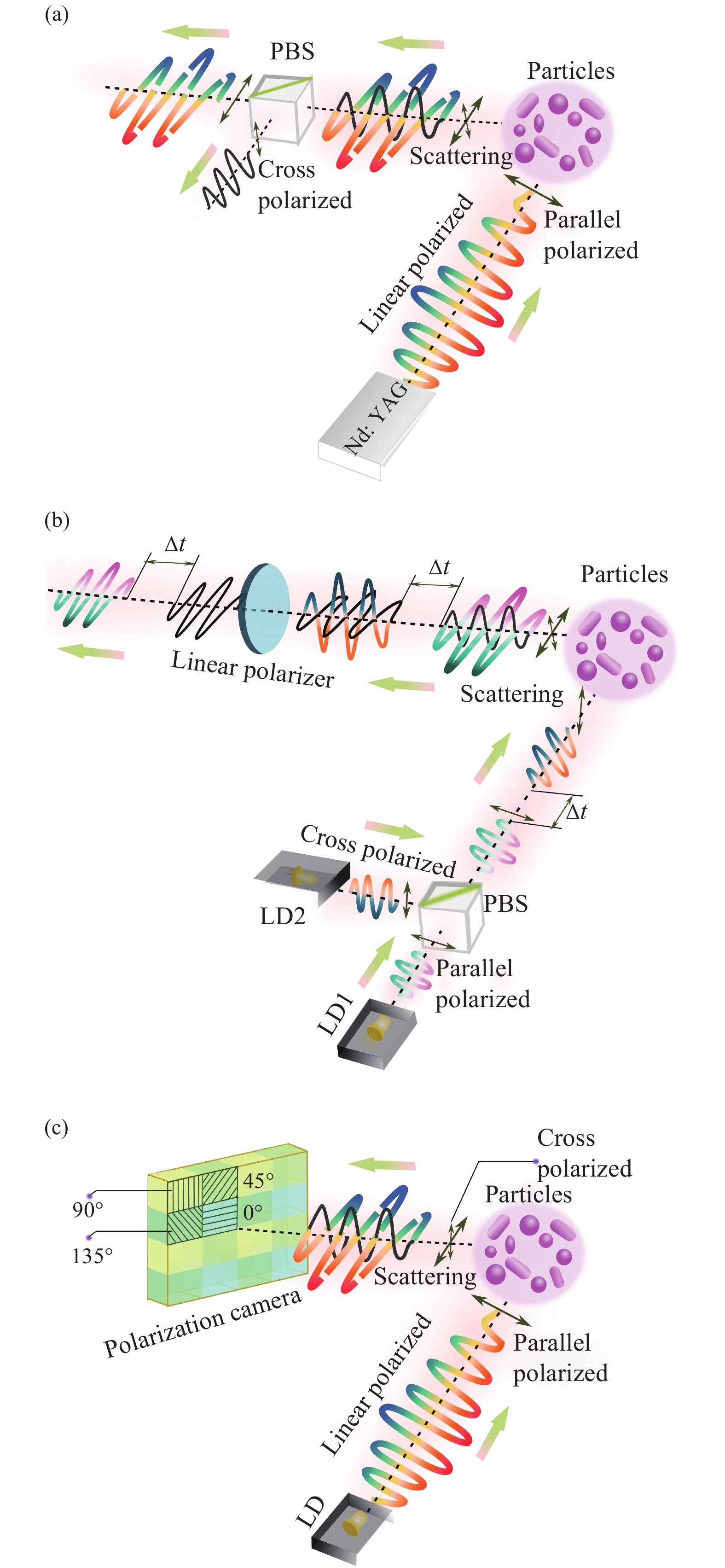
作为大气激光雷达的一个分支,偏振激光雷达在云的相位识别(水云、冰云)、气溶胶分类、光学特性反演等方面占有重要地位。目前,脉冲式双通道偏振激光雷达是大气偏振特性遥感探测最主要的方式之一。如图7(a)所示,通过向大气中发射一束线偏振激光,经大气粒子散射后,大气回波信号经过偏振分光器件分离出垂直和平行偏振分量,从而可得到大气退偏振比。不同于传统的脉冲式偏振激光雷达系统采用单光源、双偏振探测器的技术方案,大连理工大学提出了一种基于时分复用原理的新型偏振沙氏大气激光雷达探测技术,并实验验证了其可行性[20]。该研究工作采用正交偏振的两个二极管激光器,通过交替发射正交偏振激光光束,并利用单个图像传感器通过时分复用的方式实现了水平和垂直偏振的后向散射光信号的交替探测,系统工作原理如图7(b)所示。然而,该方案测量的垂直偏振大气激光雷达信号信噪比偏低,尤其是在白天强背景光的条件下,信号平均1.5 min测量得到的原始垂直偏振大气回波信号的信噪比仅为30左右。利用更高功率的二极管激光器或提升图像传感器的量子效率有望进一步提高偏振沙氏大气激光雷达系统在白天工作时的信噪比。
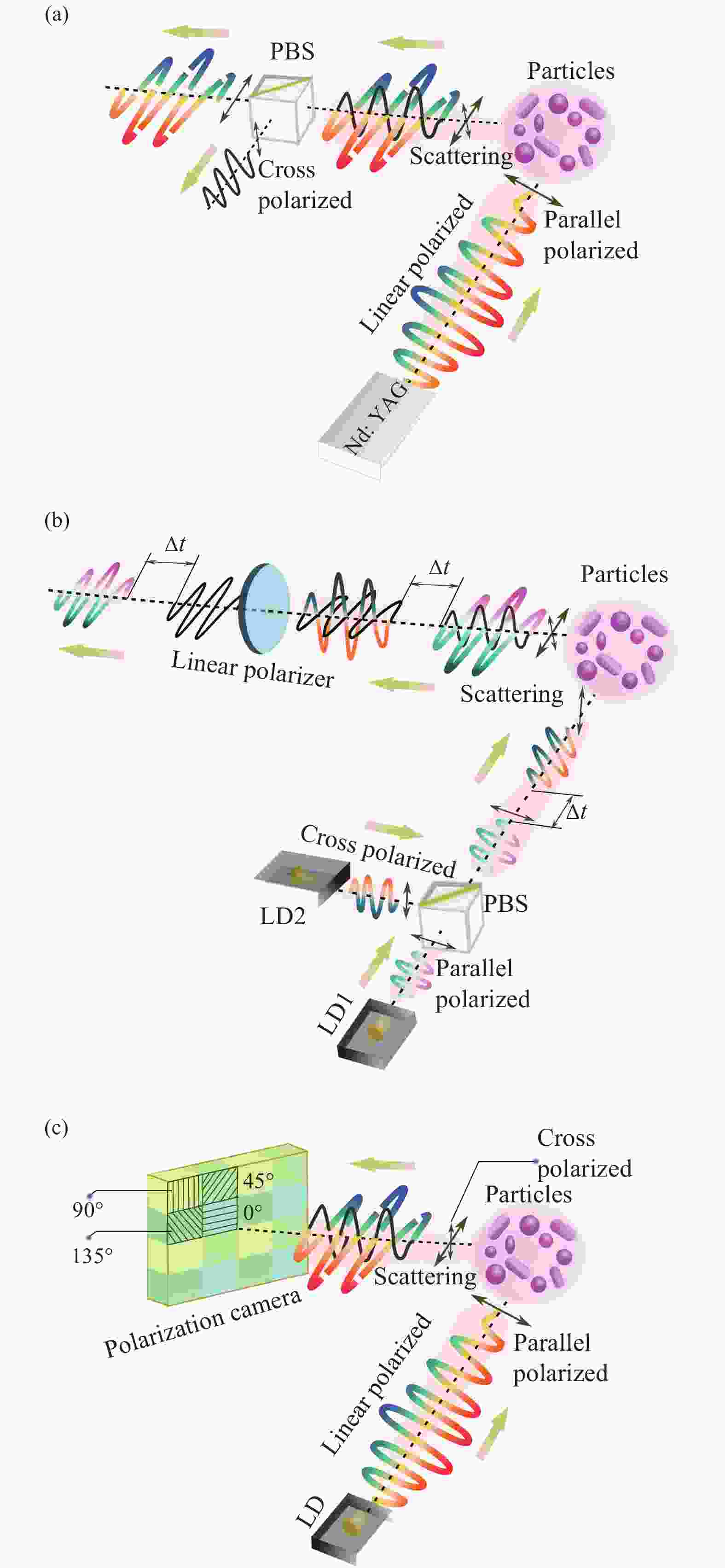
Figure 7. Measurement principles of atmospheric polarization lidar. (a) Dual-channel pulsed polarization lidar, (b) Polarization Scheimpflug lidar based on the time-division multiplexing scheme, (c) Polarization-sensitive imaging lidar utilizing a polarized image sensor
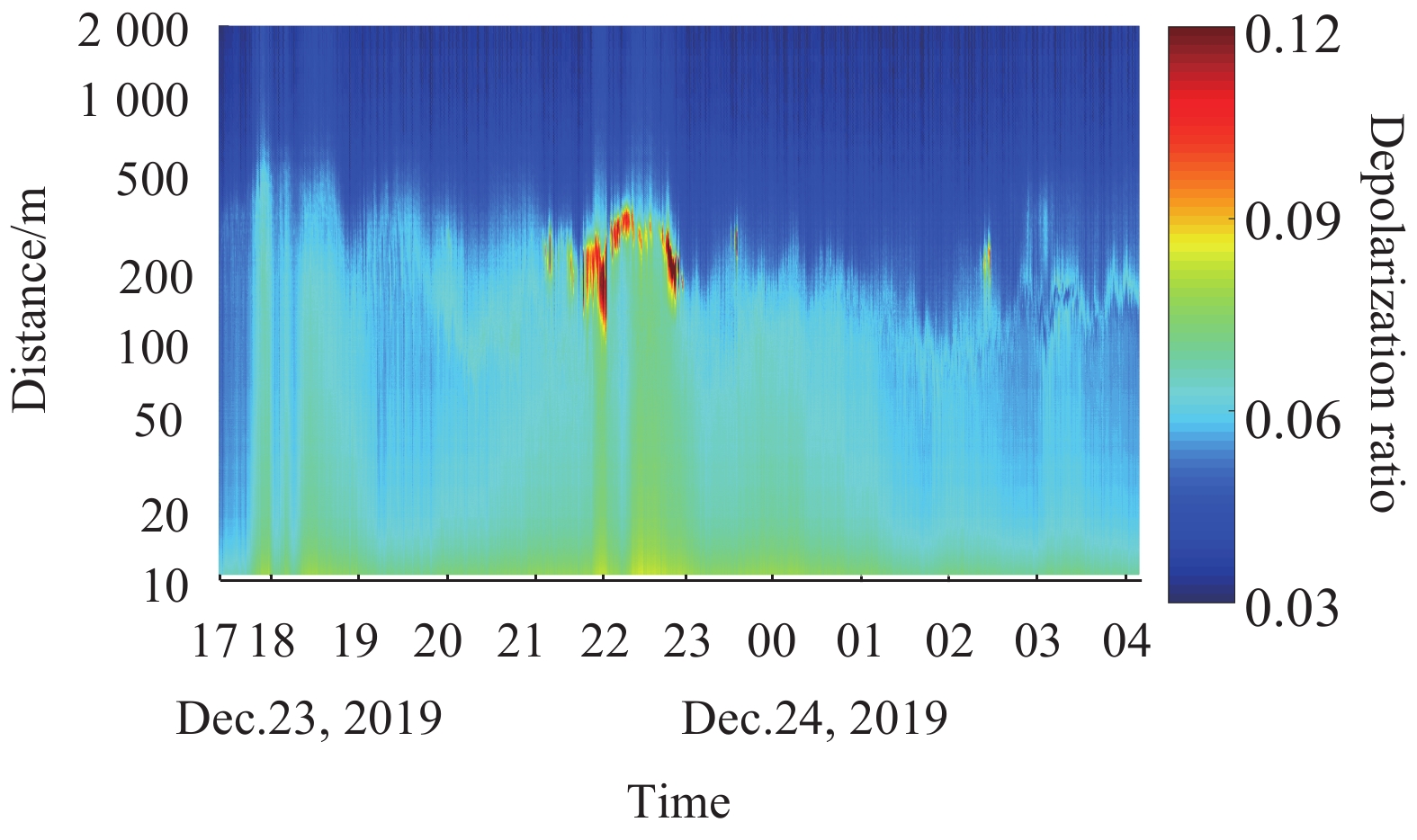
虽然双通道偏振激光雷达发展得非常成熟,然而其测量精度始终受到增益比、激光偏振纯度、偏振失配角、光学元件的非理想偏振特性等因素的影响。接收通道增益比定标问题几乎贯穿了整个偏振大气激光雷达的发展历程,成为该方案面临的主要挑战。2019年,大连理工大学提出了一种新型的偏振成像大气激光雷达技术[21]。如图7(c)所示,该技术使用线偏振连续波450 nm二极管激光器作为光源,使用具有四种偏振通道(0˚、45˚、90˚、135˚) CMOS偏振图像传感器作为探测器,发射端与接收端在系统结构满足沙氏成像原理的前提下实现大气的偏振测量。该技术无需添加额外的光学元件和复杂的增益比定标,可以实时获取体退偏比和偏振失配角。垂直大气测量实验表明偏振成像激光雷达可实现大气退偏振特性的高精度探测(图8)。此外,大连理工大学激光雷达课题组利用Stokes-Mueller理论的数学模型详细评估了成像激光雷达系统的测量误差[22]。基于该技术方案,有望利用45˚或135˚偏振方向的后向散射信号开展定向散射体(例如水平定向冰晶等)探测研究[23]。
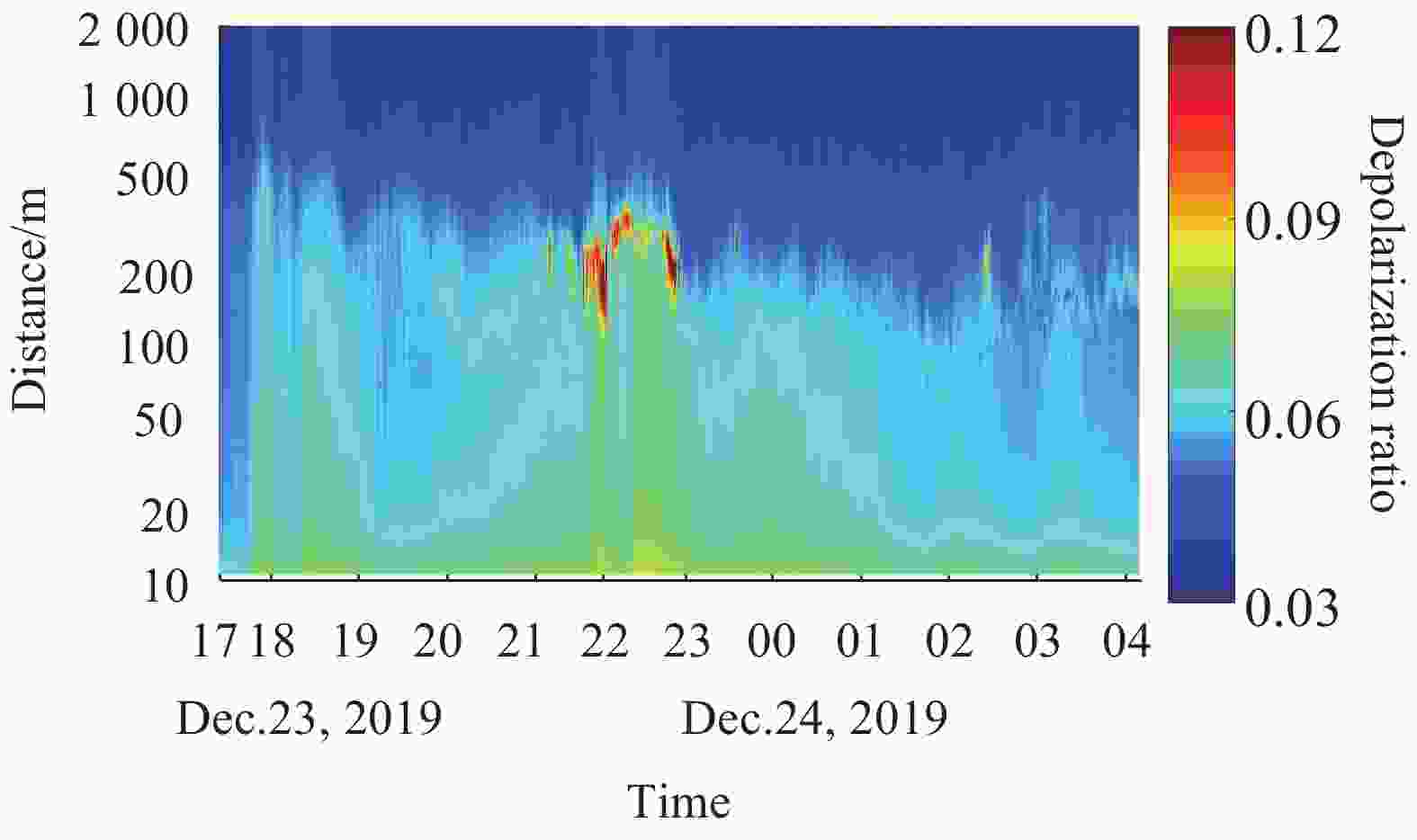
Figure 8. Time-space map of the linear volume depolarization ratio measured by the polarization-sensitive imaging lidar in Dec. 2019
-
近年来,大气激光雷达技术被广泛应用于大气污染源的扫描探测,在大气污染监测与监管方面发挥着重要作用。2018年,大连理工大学激光雷达课题组自主设计了两套808 nm可携式沙氏大气激光雷达系统,分别采用折射式望远镜和牛顿反射式望远镜作为接收望远镜,如图9所示[11]。系统主要包括激光发射单元、大气回波信号接收单元、系统控制与数据采集单元,相机倾角均为45˚。为了提高信噪比,两套系统均采用3 nm干涉滤光片(808 nm)和高通(LG780)滤光片抑制背景光。CMOS相机探测到大气后向散射图像后,将数据传输到计算机进行后期数据预处理,最终获得大气激光雷达信号及背景信号。两套可携式SLidar系统均可固定在重载云台上,从而实现大气污染源扫描测量、大气边界层高度测量等[24]。

Figure 9. (a) Portable SLidar atmospheric system based on a refracting telescope. Transmitter: Φ=100 mm, f=600 mm; Refracting telescope receiver: Φ=150 mm, f=750 mm; Separation between transmitter and receiver is 756 mm. (b) Portable SLidar atmospheric system based on a Newtonian telescope. Transmitter: Φ=100 mm, f=600 mm; Newtonian telescope receiver: Φ=200 mm, f=800 mm; Separation between transmitter and receiver is 806 mm
通过将扫描式沙氏大气激光雷达系统安装于城市至高点,并对城市大气环境进行全区域扫描探测,可实现对垃圾焚烧、路边烧烤、居民散乱燃烧、工地扬尘、渣土车/建筑垃圾倾倒以及工业园区排放的有效监测。图10展示了在秦皇岛市昌黎县夜间扫描测量得到的大气回波信号强度与消光系数反演结果示意图,分析消光系数时空分布可实现污染源的精准定位。通过在环保部门的安装应用表明,沙氏大气激光雷达技术在大气污染监测、监管及评估等方面具有重要应用价值。

Figure 10. (a) Atmospheric backscattering intensity distribution map and (b) atmospheric extinction coefficient retrieving map measured by a scanning SLidar system. The SLidar system was placed on the roof of a shopping mall in Changli, Qinhuangdao City, Hebei Province
-
气溶胶粒子的回波散射信号特征依赖于发射激光波长,利用多波长激光雷达可获得不同波长的气溶胶消光系数,并可根据不同波长消光系数之间的关系得到表征粒子尺寸的波长指数等参量,为进一步分析气溶胶的微物理特征提供了重要信息。另一方面,大气回波信号的退偏振效应反应了大气气溶胶的形态,与气溶胶的来源和种类密切相关。因此,国内外学者均开展了多波长偏振大气激光雷达技术和应用研究。现有脉冲式多波长偏振激光雷达系统大多利用Nd:YAG激光器的基频(1064 nm)、倍频(532 nm)以及三倍频(355 nm)激光作为光源。沙氏大气激光雷达技术利用半导体激光器作为光源,具备广泛的波长选择性,工作范围可覆盖整个可见光及近红外波段,在多波长激光雷达技术研究及应用方面具有重要潜力。
2018年,大连理工大学课题组首先实现了基于双二极管激光器、双图像传感器的双波长(407 nm和808 nm)全天时沙氏大气激光雷达系统,并将该系统用于大气颗粒物吸湿性增长研究、波长指数对比分析等[12]。此外,瑞典隆德大学课题组利用808 nm和405 nm二极管激光器作为光源,利用时分复用的结构对双波长SLidar系统进行了初步研究,但仅能在夜间及短距离范围内进行测量[25]。2019年,大连理工大学设计了三波长偏振沙氏大气激光雷达系统,如图11所示[10]。三波长偏振激光雷达系统采用405 nm、520 nm和808 nm三个通道,其中808 nm有垂直偏振和水平偏振两个通道。系统的发射单元采用两个808 nm、405 nm和520 nm激光器作为光源。其中,在808 nm激光器(LD Ⅱ)前端放置半波片将其偏振态旋转90˚。两个正交偏振的808 nm激光束由偏振分束器耦合,而405 nm和520 nm激光束通过二向色镜进行光束耦合,最终由准直透镜准直之后发射到大气之中。大气后向散射信号由牛顿望远镜来收集,接收单元采用两个CMOS相机作为探测器,其中一个探测808 nm的水平和垂直偏振信号,另外一个相机则用来探测405 nm和520 nm,每个相机均采用时分复用的方式实现信号的探测。由于没有采用干涉滤光片抑制太阳光,因此激光雷达系统只能在夜间工作。2019年,研究人员在典型大气条件下进行了近似水平大气测量,并对气溶胶消光系数、体退偏比和波长指数进行了反演。图12展示了808 nm的体退偏比时空演变图和波长指数与体退偏比随时间变化的曲线。不同大气条件下的体退偏比和波长指数如表1所示。

Figure 11. (a) Schematic and (b) photograph of the three-wavelength polarization SLidar system developed at Dalian University of Technology
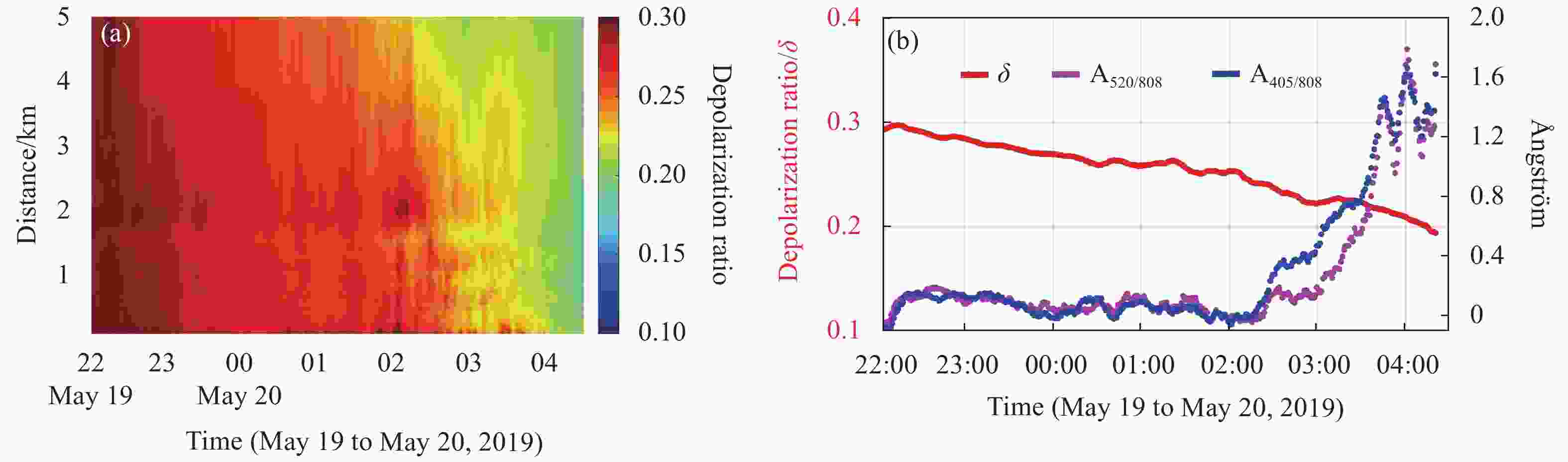
Figure 12. (a) Time-range evolution map of the linear volume depolarization ratio at 808 nm,(b) Temporal evolution curves of the median of linear volume depolarization ratio and the median of Ångström exponent
Table 1. LVDR at 808 nm and the Ångström exponents measured by the three-wavelength polarization SLidar system under different atmospheric conditions
-
差分吸收激光雷达(DIAL)技术向大气中交替发射波长不同的激光脉冲(其中一个波长位于待测气体吸收峰
$ {\lambda _{{\rm{on}}}}$ ,另一个波长偏离待测气体吸收峰$ {\lambda _{{\rm{off}}}}$ ),通过探测两个波长的大气后向散射信号,并根据待测气体的差分吸收来获取待测气体浓度分布。自20世纪以来,美国NASA[28]、德国柏林自由大学[29]、日本中央电力研究所[30]、瑞典隆德大学[31-32]、中国科学院安徽光学精密机械研究所[33-34]、武汉大学[35]、中国科学院上海技术物理研究所[36]等研究机构都相继开展了用于大气污染及温室气体测量的DIAL系统的研究工作,测量的污染气体除了常规大气污染物SO2、NOx以及O3外,还涵盖了VOC、Hg、NH3/SF6等痕量气体。利用脉冲式DIAL探测大气污染气体时,系统对光源的要求苛刻,需要双波长、高脉冲能量、窄线宽、可调谐且稳定性好的纳秒量级(10~100 ns)脉冲光源,这正是该领域困扰国际学术界的主要难题,也是限制其实际应用的重大挑战。为了克服这一难题,瑞典隆德大学课题组在2015年提出了基于沙氏成像原理的连续波差分吸收激光雷达(CW-DIAL)方案,并开展了大气中O2浓度距离分布探测的研究工作[2]。该系统所使用的激光雷达系统装置与气溶胶沙氏大气激光雷达系统类似,但采用窄线宽(10 MHz)的分布式反馈(DFB)半导体激光器。由于激光器输出功率仅有30 mW,因此实验测量主要在夜间。通过对O2吸收截面的遥感探测,论证了CW-DIAL技术方案的可行性,为基于成像原理的CW-DIAL技术在大气气体浓度分布探测方面的实际应用奠定了理论和方法基础。2017年,大连理工大学课题组利用NO2气体吸收谱线在蓝光波段的宽谱特征,以450 nm高功率(1.6 W)、多模、连续波二极管激光器为基础实现可调谐光源并应用于NO2差分吸收探测,在满足沙氏成像原理的条件下通过图像传感器实现距离分辨的大气回波信号探测,提出了基于沙氏成像原理的连续波NO2-DIAL技术[37]。如图13所示,NO2在450 nm附近有较宽的吸收峰及吸收谷。通过调节二极管激光器的驱动电流并精确控制二极管激光器芯片的温度,可分别产生位于NO2吸收峰的
$ {\lambda _{{\rm{on}}}}$ (448.6 nm)激光及位于吸收谷附近的$ {\lambda _{{\rm{off}}}}$ (452.1 nm)激光,激光器的输出波长由高分辨率光谱仪实时监测。实验测量时,高灵敏CCD传感器分别探测$ {\lambda _{{\rm{on}}}}$ 和$ {\lambda _{{\rm{off}}}}$ 波长的大气回波信号,并由计算机进行信号平均和处理,可得到大气中NO2气体的差分吸收曲线,在1 km左右的积分路径上探测灵敏度可达到ppb量级。2020年,大连理工大学课题组进一步对连续波NO2-DIAL的系统误差来源进行详细分析[38],主要包括NO2吸收截面的不确定性,CHOCHO引起的差分吸收及气溶胶消光、后向散射系数的波长依赖性等。
Figure 13. Schematic of NO2 absorption spectrum, the
${\lambda _{{\rm{on}}}}$ and${\lambda _{{\rm{off}}}}$ laser spectra2019年,瑞典皇家工学院及隆德大学研究小组设计并验证了基于沙氏成像原理的DIAL系统用于CO2浓度遥感探测[39]。通过将分布式反馈二极管激光器注入掺铒光纤放大器产生窄线宽(3 MHz)的1.57μm可调谐激光,输出功率可达1.3 W。该连续波激光经准直后发射到大气中,其后向散射信号光通过牛顿望远镜收集,并用45˚倾斜放置的线性InGaAs阵列探测器进行探测。发射端与接收端间隔814 mm。采用数据采集卡控制种子激光器电流的调节顺序,从而可获取2个暗时隙和48个光谱带的后向散射信号。该研究小组在2 km范围内进行了大气遥感实验,在400 m距离内评估的CO2浓度接近400 ppm (1 ppm=10−6),初步验证了基于沙氏成像原理的连续波CO2-DIAL技术的可行性。然而,由于近红外波段大气散射较弱,要实现高灵敏度的CO2浓度探测,还需进一步提升大气回波信号信噪比。
-
沙氏激光雷达不仅可应用于大气环境监测领域,在三维目标成像领域也有重要的应用前景。在满足沙氏成像原理的基础上,如果将发射光束由一维线光束替换为二维面光束(片光束),可将二维面阵探测器上每个像素点与探测平面的空间位置一一对应起来,从而实现了二维平面目标距离的有效探测,由此可构建二维沙氏激光雷达探测技术,如图14所示。与此同时,利用平扫或转动机构转动二维沙氏激光雷达系统可实现三维点云扫描测量,最终实现待测目标的三维成像。
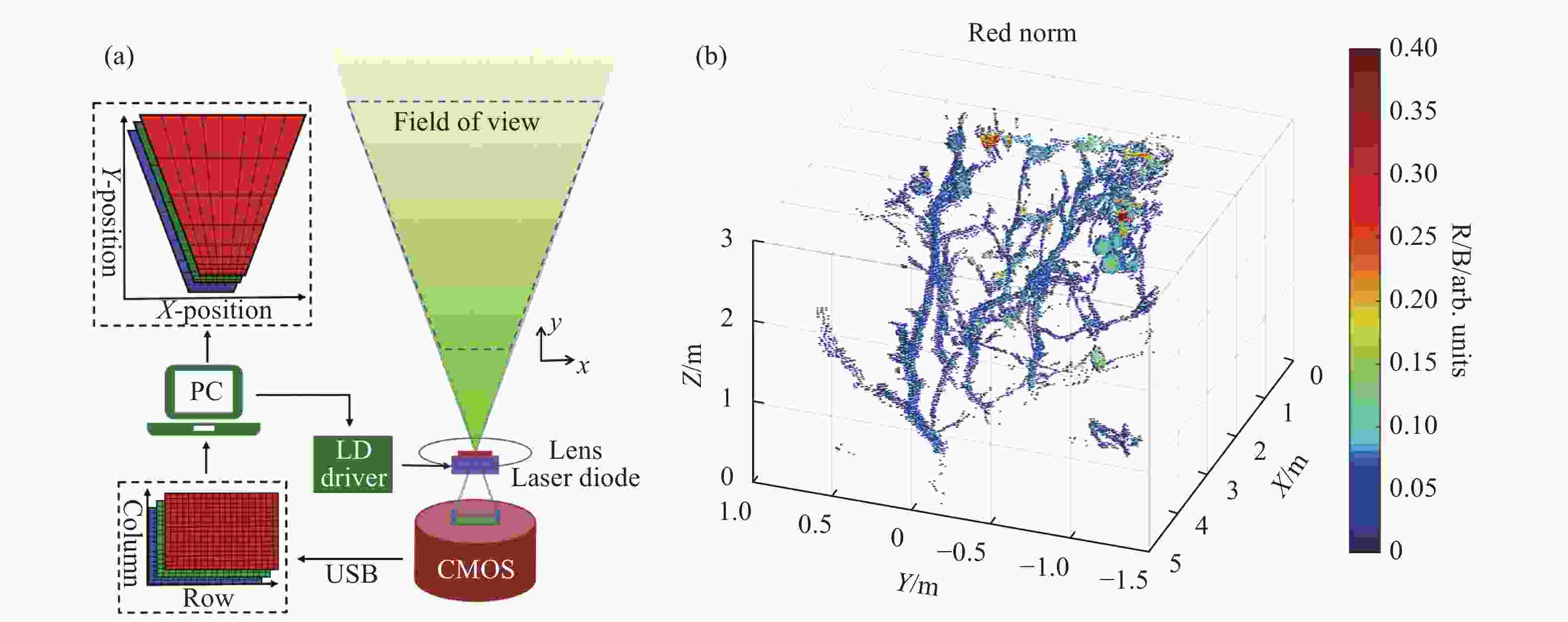
Figure 14. (a) Architecture of the 2D fluorescence SLidar principle; (b) Data cloud reconstruction result of a grapefruit tree with the 2D fluorescence SLidar 5 m away, the dot cloud intensity represents the signal intensity ratio of red channel to blue channel of image sensor
2018年,浙江大学研究小组设计了一种二维沙氏激光雷达系统用于物体表面轮廓测量。实验对方形、曲面及复杂形貌的目标分别进行三维轮廓测量,点云重建形貌与被测物体具有很好的一致性,并且在近距离处(1.5 m)可实现毫米量级的精度[40]。2019年,该课题组将二维沙氏激光雷达应用于水下三维轮廓成像场景中,并对探测光在空气-水界面处的折射进行了校正[41]。实验测量了水下1.4 m左右距离的贝壳、珊瑚等目标,获得了测量对象的3D表面轮廓,精度在毫米量级,能够清晰展现被测目标的表面纹理。这些研究表明二维沙氏激光雷达在近距离三维点云测量方面具有重要发展潜力。
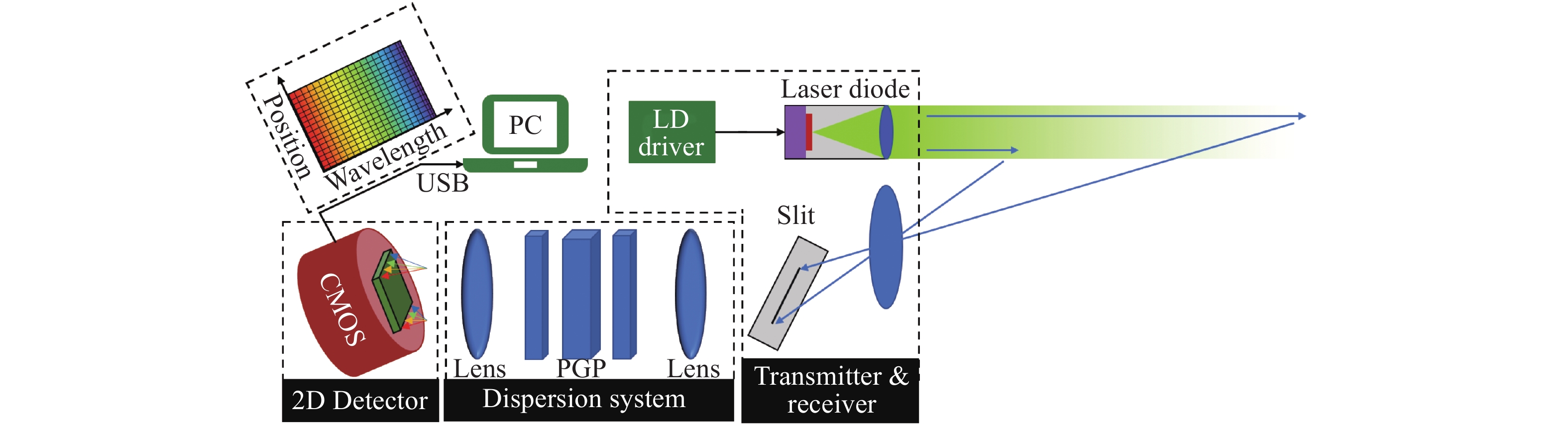
激光雷达技术通过距离测量构建待测目标的三维形貌,而光谱信息则表征了待测目标的材料、成分等重要物理化学特性。将激光雷达技术与多(高)光谱成像技术相结合可实现对待测目标的多维度探测,在地理测绘、植被探测、海洋遥感等领域具有重要应用价值。2016年,在一维沙氏激光雷达探测技术的基础上,华南师范大学赵光宇等人研制了一套紧凑的水下非弹性散射高光谱激光雷达系统,其系统结构如图15所示。该系统采用445 nm二极管激光器作为激发光源,在满足沙氏成像原理的条件下可实现对后向散射信号的清晰成像。接收端透镜收集弹性及非弹性后向散射光,通过100 μm的狭缝后,经过棱镜-光栅-棱镜(PGP)光学组件发生色散,最终聚焦到二维图像传感器上,从而在5 m的测试范围内同时获取61个波段的全波形激光雷达回波。在该工作中,研究人员初步分析了距离分辨的弹性后向散射、拉曼及荧光回波信号的反演问题[42]。2017年,浙江大学研究小组开发了一套高光谱沙氏激光雷达系统,采用激发波长为446 nm的激光诱导荧光,用于实现距离分辨的油污检测和识别[43]。通过使用主成分分析和线性判别分析方法实现了7种典型油样的初步鉴别。2020年,华南师范大学课题组对水下鱼虾的运动进行了观测,其系统能够提供5 mm空间分辨率与10 nm的光谱分辨率,并能够实现最高150 Hz的采样速率[44]。

Figure 15. Architecture of the inelastic scattering hyperspectral SLidar system
植物荧光光谱可反演叶绿素含量,并间接反映植物氮含量与生长状况。对植物的荧光进行探测[45],并结合三维点云进行生长状况监测与分析,能够加深对植物或农作物生长过程的理解。沙氏激光雷达结合激光诱导叶绿素荧光技术,可以实现植物多(高)光谱荧光点云的准确测量。2018年,华南师范大学将高光谱激光雷达系统集成到商用无人机上,采用摆扫式(Whisk broom)扫描方式,验证了植被高光谱荧光点云探测的可行性[46]。2020年,杭州电子科技大学联合大连理工大学研究小组提出了一种基于RGB面阵相机的荧光沙氏激光雷达技术[47]。通过发射405 nm片光束,RGB面阵相机可同时探测目标的弹性散射光和荧光信号,采用推扫式(Push broom)扫描方式实现三维多通道荧光点云探测,如图14所示。其中,弹性散射光的强度较强,主要被蓝色(B)通道探测,用以构建植物的三维轮廓;荧光强度主要由红色(R)和绿色(G)通道获取,用以区分点云的所属种类。图14(a)中展示了该二维荧光沙氏激光雷达系统的俯视原理图,其探测原理与二维弹性散射沙氏激光雷达系统类似,可以看出其单次测量范围为梯形平面。图14(b)展示了该系统架设到云台后对5 m外一颗柚子树进行扫描的结果,点云强度代表了点云红色通道与蓝色通道强度的比值。从结果可以看出,柚子树的树干、果实和树叶都得到了可视化的区分,因而避免了复杂的空间模型运算。
高光谱激光雷达具备丰富的光谱探测通道,能够为生物或特征物质的定性、定量探测提供更多的光谱信息,结合空间与时域信号,可以建立更稳定的分类模型。对于多光谱荧光激光雷达,得益于其面阵探测的测量方式,相较其他激光雷达有更大的单次测量范围和更高的测量效率,因而在分散目标探测及大通量探测等方面有很大的应用潜力。将多(高)光谱沙氏激光雷达系统搭载在无人机或地面扫描平台后,将有望应用于地面生物量测量、作物长势监测、产量评估等方面,可与传统激光雷达技术形成有力互补。
-
飞行动物对生态和人类生存条件至关重要。有些物种(比如蜜蜂、蝴蝶)是必不可少的传粉媒介,直接影响粮食的产量[48]。有些物种则是传播致命疾病(如蝙蝠及传播疟疾的蚊子等)的危险媒介,其携带的传染性病毒、病菌会对人类健康造成严重威胁[49-50]。
沙氏激光雷达在1~2 km范围内具有较高的时空分辨率,瑞典隆德大学利用808 nm沙氏激光雷达技术开展了对昆虫、鸟类和蝙蝠飞行活动的测量研究工作[51-53]。该系统采用200 mm口径牛顿望远镜(f=800 mm)收集待测目标的后向散射信号,采用具有高帧速(kHz以上)的CMOS图像传感器采集信号,并将其以45˚倾角放置以满足沙氏成像原理,从而可实现对空中的昆虫、鸟类及蝙蝠的有效探测[54]。瑞典隆德大学Carsten Kirkeby等人在夏天夜晚用沙氏激光雷达对昆虫飞行行为进行量化研究,其统计分析结果与部署在激光雷达系统旁边的灯光诱导陷阱统计数据较为吻合,表明沙氏激光雷达具备用来区分不同类型昆虫并量化其运动行为的能力[52]。2018年,Samuel Jansson等人利用沙氏激光雷达对蝙蝠被风力涡旋机吸引的现象进行研究,研究发现蝙蝠在涡旋机周围进行觅食和社交活动[54]。Mikkel Brydegaard等人利用3.5 kHz调制频率的沙氏激光雷达评估了2016年平时和泛非日食期间疟疾媒介的活动,并分析了日食期间野生疟疾昆虫种群活动的昼夜变化[55]。
2017年,隆德大学联合华南师范大学使用连续波偏振沙氏激光雷达技术对中国南方稻田中的昆虫进行了大量监测实验[56-57]。该系统使用了两个具有正交偏振的808 nm高功率二极管激光器,通过时分复用的方式实现昆虫退偏特性研究。Ziwei Song等人通过分析昆虫翅膀的拍频回波信号来识别昆虫种类,并研究诱导灯光对它们在夜间飞行行为的影响[58]。Elin Malmqvist等人在520 m范围内对中国稻田中的蝙蝠和昆虫飞行活动进行探测。通过对激光雷达数据的统计分析发现,蝙蝠的掠食飞行活动受到强光限制,而昆虫夜蛾利用这一特点,在日落/日出附近大量出动,以最大限度地减少被蝙蝠掠食[57]。Shiming Zhu等人使用偏振沙氏激光雷达用于监测中国南方农场稻田中飞行昆虫的昼夜活动以及天气条件变化(例如下雨)的影响。测量结果表明,昆虫的活动在黄昏达到顶峰,并在黎明前再次上升,在降雨开始时,昆虫数量急剧增加,这主要是雨水将高空飞行昆虫冲刷下来所致[59]。
通过使用沙氏激光雷达对大气中的飞行昆虫、鸟类及蝙蝠等物种的飞行行为进行探测研究,可深入了解其活动特性和规律,在传染疾病的预防、农业害虫的防治及昆虫生态学研究等方面具有重要应用价值。
-
作为一种高时空分辨率的非侵入式原位测量技术,激光光谱技术在燃烧过程诊断如物质浓度、燃烧场温度和速度测量等方面具有重要应用价值。然而,当前大多数光学诊断技术都需要多个角度的光学窗口以进行探测,检测范围相对较短(通常为厘米级),而且要求诊断设备必须靠近测量对象。这些局限性阻碍了大型锅炉、发电厂等设备的激光诊断。基于吸收光谱等视线测量方法一般只能测量沿视线的平均浓度,难以实现距离分辨的测量。为了获得距离分辨的光学诊断结果,往往需要利用皮秒量级高能量脉冲激光和高速探测器搭建激光雷达系统,导致系统极其复杂[60]。沙氏激光雷达采用小型化、连续波二极管激光器作为发射光源以及图像传感器作为探测器,可实现距离分辨的光学测量与诊断,为高空间分辨率的单端燃烧诊断提供了一种新思路。
2018年,隆德大学课题组研发了可在20 m范围内进行燃烧诊断测量的便携式沙氏激光雷达系统[61]。该系统能够以较高的距离和时间分辨率实现远程后向散射测量。通过将激光发射装置、接收装置和图像传感器按照沙氏成像原理放置,可实现燃烧诊断所需的大景深。激光光束被清晰地成像到ICCD探测器上,从而实现距离分辨的光学测量。该研究工作展示了瑞利散射测温、气溶胶探测和激光诱导荧光测量等多种应用。2019年,该课题组进一步将沙氏激光雷达与原子荧光测温技术相结合,将铟原子注入到燃烧器中,使用波长分别为410.17 nm和451.12 nm的可调谐单模二极管激光器激发铟原子,并通过线阵探测器和二维增强CCD相机收集荧光信号,从而实现距离分辨的温度测量[62],进一步展示了沙氏激光雷达在燃烧诊断领域的应用前景。
-
激光雷达技术在海洋遥感探测中具有重大应用价值,传统海洋激光雷达大多需要高性能纳秒量级脉冲光源,系统结构复杂、体积质量较大、成本较高。沙氏大气激光雷达技术具有结构简单、体积质量较小、成本较低、易于维护等特点,在海洋光学探测方面具有重要应用价值。2020年,中国海洋大学吴松华教授课题组从海洋科学应用出发,针对小角度后向散射现场测量的问题,设计了水体沙氏激光雷达系统[63]。该系统采用532 nm的半导体泵浦固体连续激光器作为光源,使用焦距为100 mm的双胶合透镜对散射信号进行收集,最终通过CMOS相机在满足沙氏成像原理的条件下实现后向散射信号探测。基于水槽实验对去离子水、自来水及河水三种水体的后向散射强度进行测量,并详细分析了激光光束宽度及光束强度衰减率,实验结果与分光光度计测量的吸收系数具有较好的一致性。通过水槽实验证明,基于沙氏成像原理的光学测量技术为海洋水体小角度(175.5°~178.5°)后向散射测量提供了一种简单、有效的技术手段。
-
沙氏激光雷达技术采用高功率二极管激光器作为光源以及图像传感器作为探测器,具备探测盲区小、结构紧凑、后期维护简单、性价比高等特色和优势,近年来在大气遥感研究及应用方面取得了长足的进步。由于高功率半导体激光器技术的迅速发展,已实现了从407~808 nm的多个波段的单波长、双波长及三波长沙氏大气激光雷达探测系统。通过采用强度调制、窄带滤波、自动曝光、信号平均及数字滤波等一系列方法,在大部分情况下实现了全天时大气遥感探测。通过与点式监测站点以及传统脉冲式大气激光雷达测量结果的详细对比研究,进一步验证了沙氏大气激光雷达技术在大气气溶胶定量化遥感探测方面的可靠性。近年来研制的小型化、便携的扫描式沙氏大气激光雷达系统实现了大气污染源扫描探测、大气边界层遥感等一系列应用。在西安、天津、秦皇岛、辛集等十余个省市环保部门的应用效果表明,沙氏大气激光雷达技术可在大气污染监测中发挥重要作用,可成为脉冲式大气激光雷达技术的有力补充。
在气溶胶沙氏大气激光雷达研究方面,未来的工作将主要包括两大部分:首先,研究系统硬件设计、信号探测、大气参数反演新方法,进一步提升大气回波信号信噪比,提高大气参数反演精度和鲁棒性;其次,针对边界层气溶胶演变过程、大气退偏振比、粒子谱等观测需求,研究自动化、全天时、高精度的单(多)波长偏振成像大气激光雷达探测技术,为激光雷达观测网等应用提供低维护、高性价比的技术手段。
通过融合差分吸收光谱技术,沙氏大气激光雷达可实现O2、NO2、CO2等大气气体浓度分布探测,克服了传统脉冲式DIAL技术对窄线宽、高能量脉冲、可调谐光源的严苛要求,为DIAL技术在大气污染、温室气体探测中的实际应用提供了新思路。由于DIAL技术对信噪比的要求远高于气溶胶探测激光雷达技术,如何进一步提高沙氏大气激光雷达技术大气回波信号信噪比,从而提高探测灵敏度将是下一步研究工作需要重点考虑的问题。
另一方面,瑞典隆德大学、浙江大学、中国海洋大学、华南师范大学、杭州电子科技大学及大连理工大学等单位开展了基于沙氏成像原理的激光雷达技术在三维目标成像、荧光(高光谱)激光雷达探测、生态学研究、燃烧诊断、水体探测等方面的技术及应用研究工作,充分展示了沙氏激光雷达技术在这些领域的应用潜力和前景。然而,相关研究工作大多处于起步阶段,围绕这些领域的新方法、新系统、新应用将是未来研究工作的重要方向。


































 DownLoad:
DownLoad: