






-
受太阳辐射和对流层大气活动等影响,临近空间大气复杂多变,一些基本特征、波动特征等还没有被认识清楚[1-2]。需要发展临近空间大气探测技术,积累足够多的实测数据,用于掌握大气基本特征和波动特征,建立准确的临近空间大气模型,为临近空间飞行活动、航天活动等提供大气环境保障。
风场和温度是表征临近空间大气状态的基本参量,它们的同时测量在研究大气的动能、位能、大气波动以及上下层耦合关系时比较重要。临近空间区域位置较高,大气比较稀薄,缺少探测示踪物,能够长时间同时测量临近空间风场和温度的设备并不多。由于多普勒激光雷达发射的激光可以与大气分子发生散射作用,通过测量散射光信号的多普勒频移、多普勒展宽、强度等可以同时获得风场和温度,成为临近空间大气环境探测的重要手段。其中钠荧光散射多普勒激光雷达和瑞利散射多普勒激光雷达是两种具代表性的临近空间多普勒激光雷达。它们利用共振荧光和瑞利两种不同散射机制的信号,能够测量不同高度范围的风场和温度,技术成熟度比较高。这里临近空间多普勒激光雷达是指能够利用多普勒检测技术测量临近空间环境的激光雷达。与对流层使用的相干多普勒激光雷达相比[3],临近空间多普勒激光雷达采用不同的多普勒检测技术,使用高光谱分辨率装置将散射光频率变化信息转换为散射光强度变化进行测量。
钠荧光散射多普勒激光雷达采用窄线宽的589 nm的激光去照射中间层顶区域(约75~105 km)的钠原子,钠原子经受激后发射共振荧光。收集大气散射的荧光信号,分析荧光信号的多普勒频移和展宽可以获得75~105 km大气风场与温度信息。
1990年美国科罗拉多州立大学和伊利诺伊大学研究了钠荧光散射多普勒激光雷达技术,进行了中间层顶区域大气温度测量[4-5]。随后,科罗拉多州立大学完善了钠荧光散射信号的多普勒测量技术,实现了风场和温度的同时测量,进行了长期的观测和科学研究[6-9],为该激光雷达的推广应用提供了技术参考。
2011年中国科学院国家空间科学中心发展了车载激光雷达技术,研制了一套车载式钠荧光散射多普勒激光雷达进行风场和温度的同时测量,先后在河北廊坊和北京怀柔进行了观测研究[10-11]。2012年中国科学技术大学也研制了一套钠荧光散射多普勒激光雷达进行风场和温度的同时测量,在安徽合肥进行了观测研究[12]。2018年,中国科学院大气物理研究所联合中国科学院精密测量科学与技术创新研究院研制了一套钠荧光散射多普勒激光雷达在西藏羊八井进行风场和温度的同时测量研究[13]。这些钠荧光散射多普勒激光雷达的技术方法和系统结构基本一致,都采用窄线宽589 nm激光,其频率稳定在钠原子D2a光谱特征上,调制获得相差630 MHz的三个激光频率,对这三个激光频率对应的钠原子共振荧光散射强度进行测量。
瑞利散射多普勒激光雷达发射高功率、窄线宽的可见光或紫外激光束(主要有532 nm和355 nm),与大气分子发生作用产生瑞利散射光信号。采用高光谱分辨率装置(分子/原子光谱仪或Fabry-Perot干涉仪等)测量瑞利散射光信号的频率变化,可以得到大气风速;根据瑞利散射光信号光谱变化或者强度变化,可以反演得到大气温度。
1991年波多黎各的Arecibo观测站建设了一套基于Fabry-Perot干涉仪的532nm瑞利散射多普勒激光雷达,用于测量20~60 km的温度与大气风场[14]。1997年该激光雷达又使用碘分子吸收光谱仪测量瑞利散射信号的多普勒信息,进行大气风场测量[15]。1993年法国Haute Provence 观测站建造了一套基于Fabry-Perot干涉仪的532 nm瑞利散射多普勒激光雷达[16]。2009年挪威ALOMAR观测站建造的532 nm瑞利散射多普勒激光雷达采用碘分子吸收光谱仪测量多普勒频移,同时测量20~80 km的大气风场和温度,研究中层大气的重力波活动[17-18]。
2014年中国科学技术大学采用Fabry Perot干涉仪多普勒频移测量技术研制了一套车载式355 nm瑞利散射多普勒激光雷达,在忻州、酒泉等地对重力波进行了观测研究[19-22]。2014年中国科学院国家空间科学中心采用碘分子吸收光谱仪多普勒测量技术研制了一套车载式532 nm瑞利散射多普勒激光雷达,在北京、青海、甘肃等多地进行了观测研究[23]。2018年,中国科学院大气物理研究所与中国科学院精密测量科学与技术创新研究院联合研制的可移动式532 nm瑞利散射多普勒激光雷达在西藏羊八井进行风场和温度的同时测量研究[13]。
这些瑞利散射多普勒激光雷达使用的激光波长主要为355 nm和532 nm,因为这两个波长的激光器技术比较成熟,可以获得较大功率的输出,并且对应的瑞利散射截面比较大。瑞利散射多普勒激光雷达采用的高光谱分辨率装置主要有Fabry-Perot干涉仪、碘分子吸收光谱仪等,它们在瑞利散射信号多普勒频移的测量中具有相当的能力[24]。
文中主要介绍中国科学院国家空间科学中心的钠荧光散射多普勒激光雷达和532 nm瑞利散射多普勒激光雷达的测量方法及其应用情况。
-
在中间层顶区域(约75~105 km)存在钠(Na)、钾(K)、锂(Li)、钙(Ca)、铁(Fe)等金属原子。其中钠原子的含量较高(~103/cm3),钠原子的D2共振荧光的散射截面比较大(约1.5×10−11/cm2),比较容易获得其在中间层顶区域的散射信号[25]。
钠原子基态电子组态是1S22S22P63S1,即价电子处于32S1/2能级。钠原子的第一激发态是价电子激发到3P能级,由于自旋轨道耦合,3P能级分裂为两条,32P3/2和32P1/2。这两条能级上的电子往基态跃迁,就产生钠黄线,即D2线:32P3/2→32S1/2,波长为589.158 nm (真空);D1线:32P1/2→32S1/2,波长为589.756 nm (真空)。对于超精细结构,32P3/2、32P1/2分别分裂为4个和2个能级。
钠原子的D2线跃迁决定了其荧光光谱中含有六条谱线。钠原子的荧光光谱的线宽是多种因素共同得结果,主要来源于多普勒展宽。若中间层顶区域钠原子团的视线风速为
$ V $ ,温度为$ T $ ,其荧光线型函数应当考虑多普勒展宽和多普勒频移。钠原子D2线光谱线型函数为六条谱线线型函数求和:进行归一化后为:
式中:
$ {A}_{n} $ 为相对线强度;$ T $ 为温度;$ V $ 为视线风速;$ {\nu }_{n} $ 为谱线的中心频率;$ {\lambda }_{0}= 589.158\;326\;4\left(15\right) $ nm;$ m= $ $ 3.817\;540\;35\left(19\right)\times {10}^{-26} $ kg。正是利用钠原子荧光谱线强度对温度、视线风速变化比较敏感的特点进行大气温度和风速测量的。
从钠原子D2线光谱线型函数式
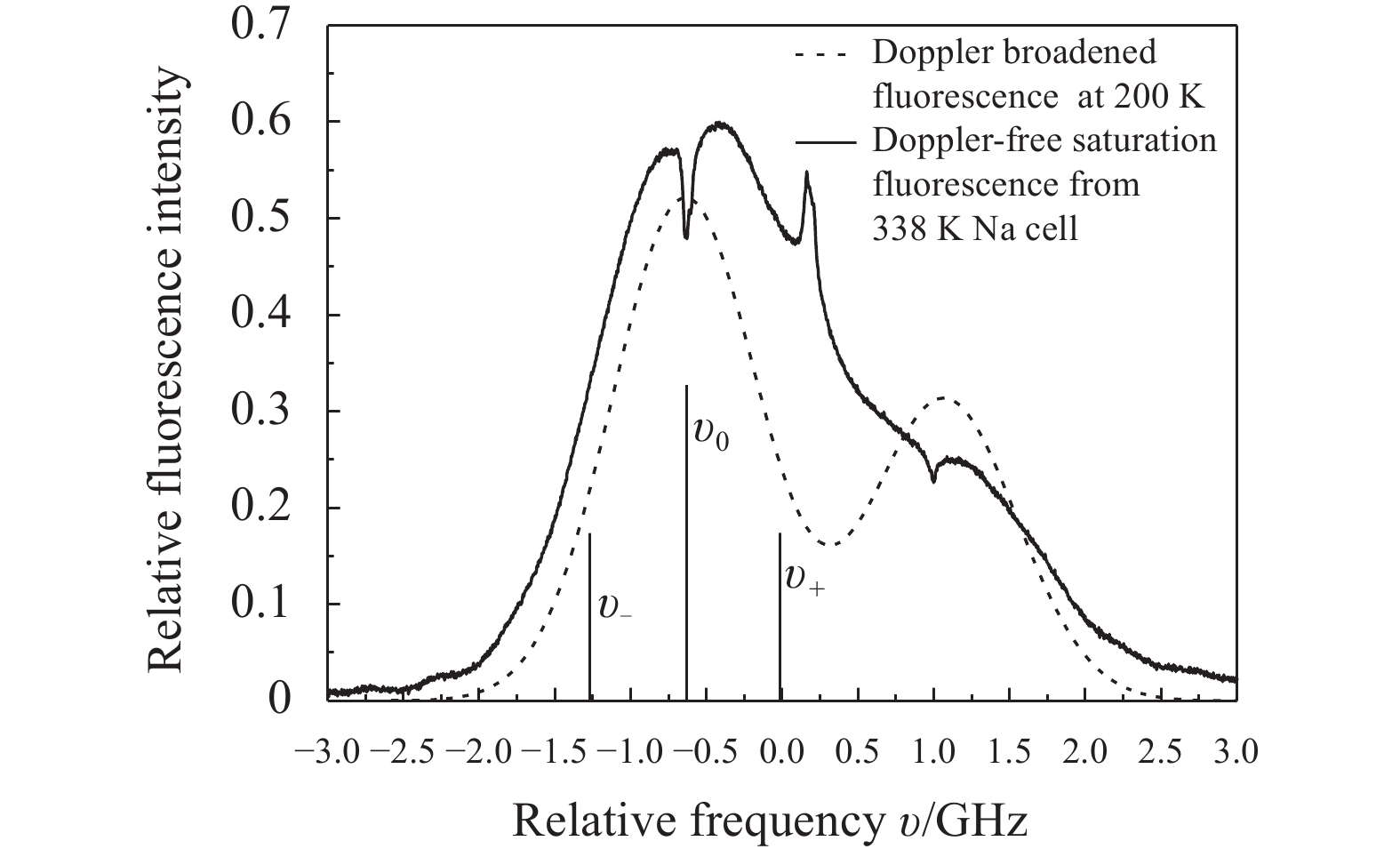
$g(\mathrm{\nu },T,V)$ 可以看出,它是频率$ \mathrm{\nu } $ 、温度$ T $ 、视线风速$ V $ 的函数。频率$ \mathrm{\nu } $ 是发射激光的频率,是已知量;温度$ T $ 、视线风速$ V $ 是变量。若要求解$ T $ 、$ V $ ,至少需要两个钠原子荧光强度观测量${N}_{0}\left(g({\mathrm{\nu }}_{0},T,V)\right)$ 、${N}_{1}\left(g({\mathrm{\nu }}_{1},T,V)\right)$ 。这两个观测量,可以通过改变频率$ \mathrm{\nu } $ 得到。建立方程组,求解温度$ T $ 和视线风速$ V $ ,避免了求解频率宽度和频移,简化了反演过程。实际上,将探测到的钠原子荧光强度作为观测量,它与钠原子数密度$ {n}_{Na} $ 、激光功率$ P $ 、接收望远镜面积$ A $ 、系统效率$ \eta $ 等参数成比例关系。这些参数不能被精确的确定,对使用两个观测量同时解算温度$ T $ 和视线风速$ V $ 带来了困难。若增加一个观测量${N}_{2}\left(g({\mathrm{\nu }}_{2},T,V)\right)$ ,通过比值的方法,消去共同项后,重新建立两个方程组,可以求解温度$ T $ 和视线风速$ V $ 。所以,同时测量温度$ T $ 和视线风速$ V $ 至少需要三个观测量。在该激光雷达系统中,使用钠原子的无多普勒饱和荧光光谱稳定激光的频率,将激光的频率稳定在钠原子D2a的凹陷处
$ {\mathrm{\nu }}_{0} $ ,如图1所示。将另外两个观测频率放置在D2a线的两个边缘上。这两个频率的光可以通过对$ {\mathrm{\nu }}_{0} $ 频率的光进行移动一定量$ \mathrm{\Delta }\mathrm{\nu } $ 得到:$ {\mathrm{\nu }}_{+}= $ $ {\mathrm{\nu }}_{0}+\mathrm{\Delta }\mathrm{\nu } $ ,$ {\mathrm{\nu }}_{-}={\mathrm{\nu }}_{0}-\mathrm{\Delta }\mathrm{\nu } $ 。$ \mathrm{\Delta }\mathrm{\nu } $ 大小会影响测量灵敏度,通过对灵敏度的分析,可以确定$ \mathrm{\Delta }\mathrm{\nu } $ 大小为630 MHz。
Figure 1. Doppler-free saturation fluorescence spectrum and Doppler broadened fluorescence spectrum
设三个频率
$ {\mathrm{\nu }}_{0} $ 、$ {\mathrm{\nu }}_{+} $ 、$ {\mathrm{\nu }}_{-} $ 处的钠荧光相对强度分别为:$ {N}_{0} $ 、$ {N}_{+} $ 、$ {N}_{-} $ ,它们是频率、温度、风速的函数,可以定义以下两个比值,建立方程组求解温度和风速。可以将
$ {R}_{T} $ 、$ {R}_{V} $ 分别称为温度测量比值和风速测量比值。然后由$ {R}_{T} $ 、$ {R}_{V} $ 与温度和风速的对应关系确定温度值和风速值。这种温度和风速测量是通过使用三个激光频率,对其散射信号强度进行比值来实现的。消除了激光雷达系统参数的影响,避免了一些校准定标工作。
影响温度测量准确度的主要因素是激光线宽的变化。当激光线宽变化1 MHz时,反演的温度偏差约为0.12 K。影响风速测量准确度的主要因素是激光中心频率的变化。当激光中心频率变化1 MHz时,反演的风速偏差约为0.59 m/s。影响温度和风速测量不确定度的主要因素是回波信号的信噪比。通过对回波信号信噪比的分析确定测量不确定度。
-
利用钠原子共振荧光D2线测量大气温度和风场需要满足几个条件:窄线宽的激光、激光的频率稳定在钠原子D2a的特征处
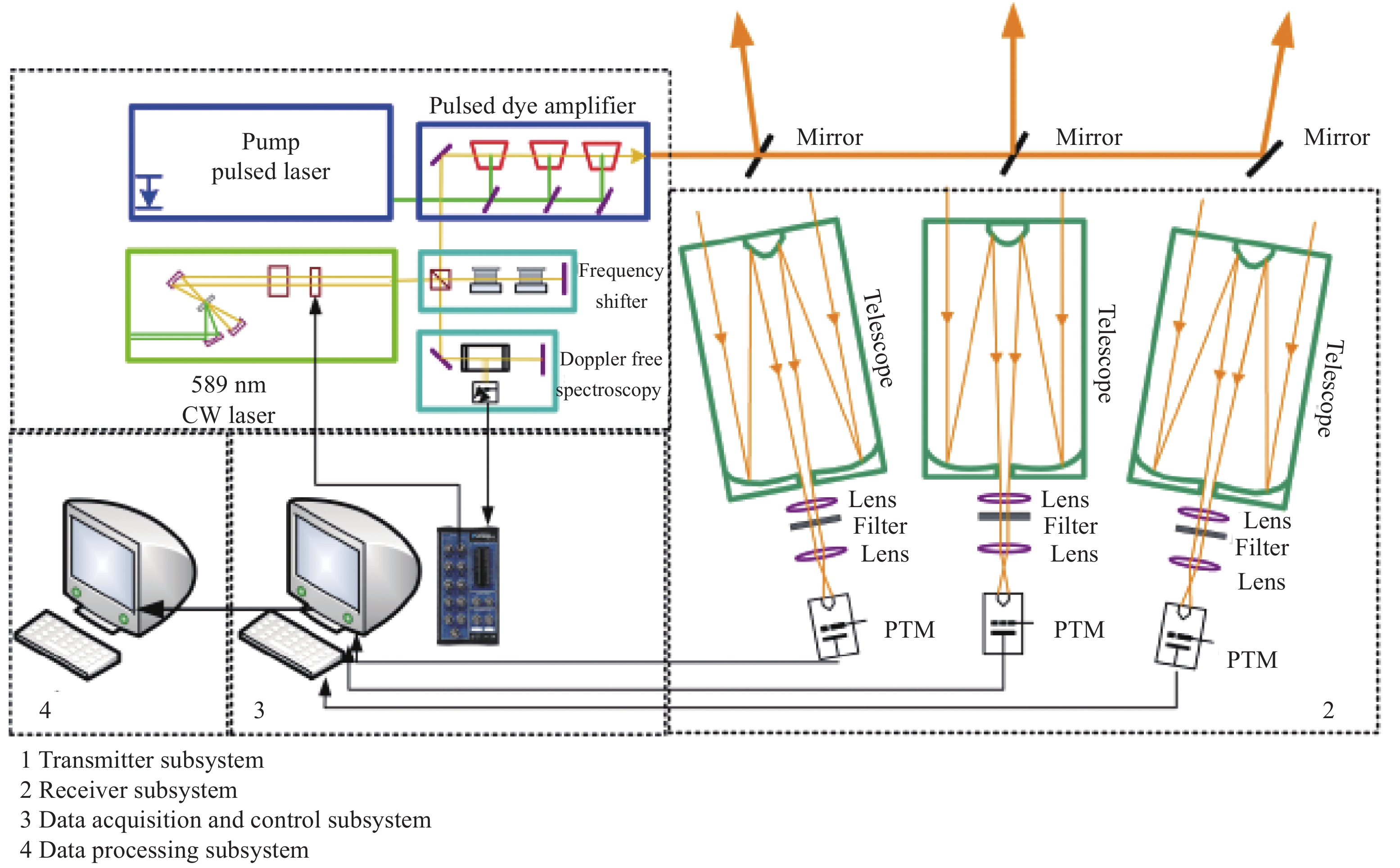
$ {\mathrm{\nu }}_{0} $ 、激光频率调节±630 MHz、多方向观测等。在钠荧光散射多普勒激光雷达研制中,采用窄线宽的589 nm连续激光器和脉冲染料放大器获得窄线宽的脉冲激光;采用钠原子无多普勒饱和荧光光谱装置对激光频率进行稳定;采用声光移频装置对激光频率进行调节;采用激光分束、三台接收望远镜对不同方向进行观测。钠荧光散射多普勒激光雷达系统可以分为:激光发射子系统、散射信号接收子系统、数据采集与控制子系统、数据处理分析子系统以及车载平台子系统等,如图2所示。

Figure 2. Schematic diagram of sodium fluorescence scattering Doppler lidar
激光发射子系统主要获得频率稳定、窄线宽的三个频率的脉冲激光束。使用窄线宽的589 nm连续激光器获得窄线宽激光束。激光的频率会因环境温度等因素的变化而漂移。为了消除激光频率的漂移,研制钠原子无多普勒饱和荧光光谱装置[26],将激光的频率稳定在钠原子荧光光谱D2a峰值处,稳定精度约为2 MHz。为了获得上述三个频率(
$ {\mathrm{\nu }}_{0} $ 、$ {\mathrm{\nu }}_{+} $ 、$ {\mathrm{\nu }}_{-} $ )的激光,研制了激光移频装置,使用两个声光移频器,一个用使激光频率改变+630 MHz,一个改变−630 MHz。最后,采用脉冲染料放大器,对移频系统输出的激光进行放大,输出30 Hz,~1 W的脉冲激光。虽然脉冲之间激光线宽略有差异,但一段时间内的激光线宽统计结果差异很小,对温度测量的准确度影响较小。散射信号接收子系统,使用望远镜收集大气散射回来的光子,经光学滤波器滤除背景光后被光电倍增管探测。散射信号接收子系统采用三个1 m口径的望远镜分别接收来自垂直方向、天顶偏东30°、天顶偏北30°等3个方向的回波信号,以便于同时获取三个方向上的温度和视线风速数据,以及最后合成三维风场数据。垂直方向上一段距离内风速平均值用来对激光中心频率位置进行校正,使最后测量的风速偏差达到可以忽略的程度。
数据采集与控制子系统,采用光子计数卡采集光电倍增管输出的信号;采用时序控制器控制激光移频装置、激光器、光子计数卡等的工作顺序。
数据处理分析子系统,利用采集到的激光雷达回波信号反演大气参数。
车载平台子系统由两辆改装的厢式卡车组成,其中一辆用于安装激光发射子系统、数据采集控制子系统、数据处理分析子系统等;一辆用于安装散射信号接收子系统,如图3所示。

Figure 3. Vehicle-mounted sodium fluorescence scattering Doppler lidar
钠荧光散射多普勒激光雷达主要性能参数见表1。
Parameters Value Transmitter Laser wavelength/nm 589.158 Laser power/W ~1.0 Repetition rate/Hz 30 Pulse duration/ns ~7 Beam divergence/mrad ~1 Receiver Telescope aperture/cm 100 Field of view/mrad ~2 Bandwidth of interference filter/nm 1.0 Table 1. Parameters of sodium fluorescence scattering Doppler lidar
-
在钠荧光散射多普勒激光雷达研制完成后,为了能够探80 km以下的大气风场和温度,又研制了532 nm瑞利散射多普勒激光雷达。该激光雷达是利用碘分子吸收光谱仪测量大气瑞利散射信号多普勒频移和信号强度实现风速和温度测量的。
-
发射一定波长
$ \mathrm{\lambda } $ 和功率的激光至大气中,遇到大气分子散射回来一部分光子形成瑞利散射信号。瑞利散射信号被望远镜接收后被分为两部分,一部分通过高光谱分辨率装置后到达探测器,称为测量通道信号$ {N}_{M} $ ;另一部分直接到达探测器,称为参考通道信号$ {N}_{R} $ 。根据激光雷达方程,测量通道信号和参考通道信号强度可以写为[20]:式中:
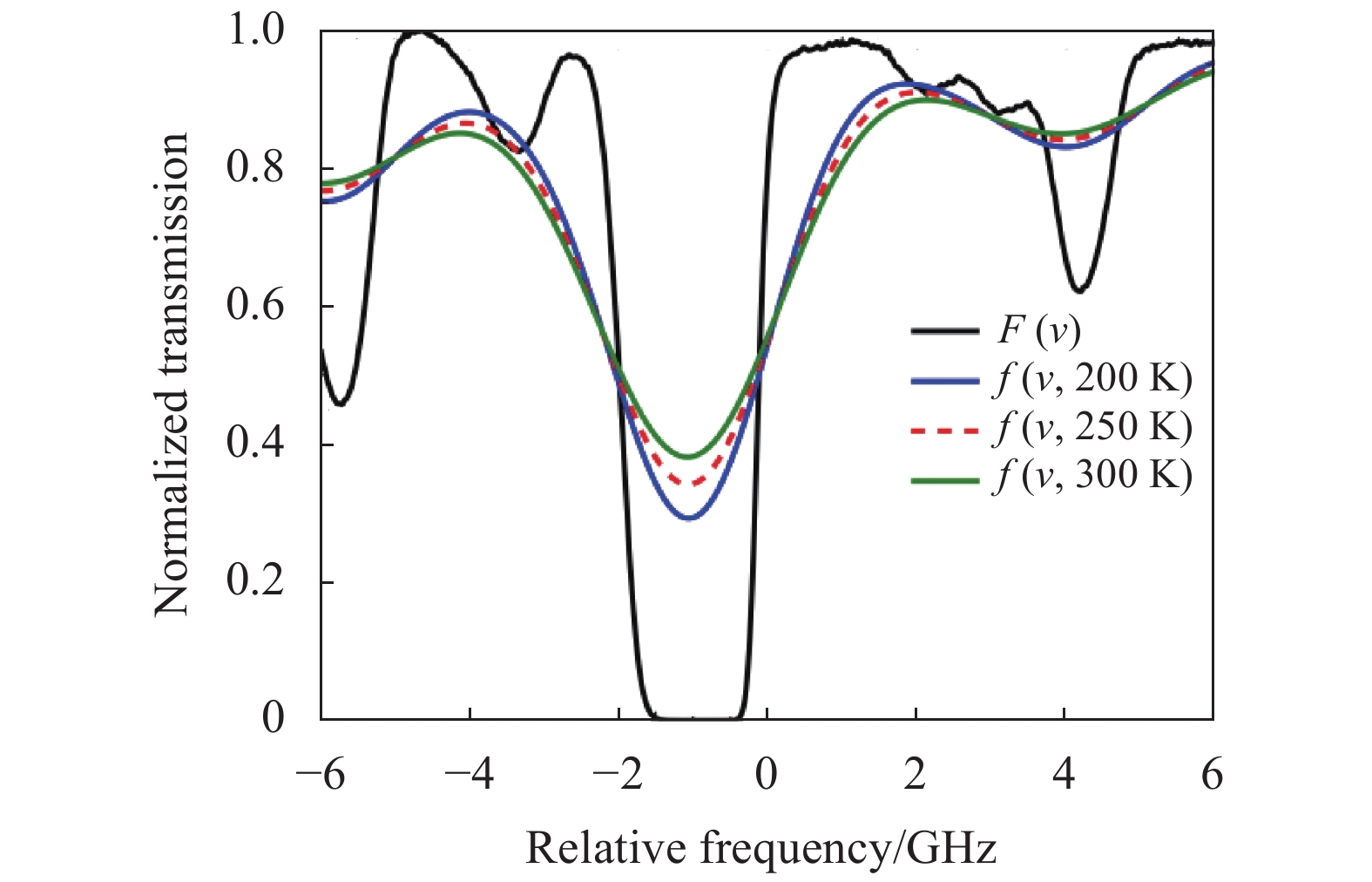
$ {N}_{M}(\lambda ,{\textit{z}}) $ 、$ {N}_{R}(\lambda ,{\textit{z}}) $ 分别表示两个测量通道接收到的距离${\textit{z}}-\mathrm{\Delta }{\textit{z}}/2$ 到${\textit{z}}+\mathrm{\Delta }{\textit{z}}/2$ 范围内的大气散射光子数;$ N $ 为发射的光子数;$ {\textit{z}} $ 为高度;$ \lambda $ 为激光波长;$ \;{\beta }_{m}\left(\lambda ,{\textit{z}}\right) $ 为大气分子后向散射系数;$ {f}_{m} $ 为是高光谱分辨率装置对瑞利散射信号透过率;$ {k}_{M} $ 、$ {k}_{R} $ 分别表示两个测量通道的系统常数;$ T\left({\textit{z}}\right) $ 表示大气的单程透过率。高光谱分辨率装置具有较高的光谱分辨能力。当大气运动引起瑞利散射信号产生多普勒频移时,瑞利散射信号对于高光谱分辨率装置的透过率发生明显的变化。在该激光雷达系统中使用碘分子吸收光谱仪作为高光谱分辨率装置。图4是碘分子吸收光谱仪的透过率曲线
$ F\left(\mathrm{\nu }\right) $ 以及瑞利散射信号的透过率曲线$ {f}_{m}(\mathrm{\nu },T) $ 。当激光的发射波长稳定在透过率曲线一边缘适当位置时,多普勒频移使瑞利散射信号的透过率增大或减小,即$ {f}_{m} $ 增大或减小。根据$ {f}_{m} $ 的变化,获得多普勒频移量,进而得到大气视线风速。定义测量通道信号与参考通道信号的比值为风速测量比$ {R}_{V} $ :由风速测量比
$ {R}_{V} $ 的变化计算风速$ V $ 。$ {k}_{M}/{k}_{R} $ 为固定常数,可通过定标的方法获得。
Figure 4. The iodine absorption spectrum line and atmosphere molecular scattering transmissions when different temperature
瑞利散射信号通过碘分子吸收光谱仪的透过率还与温度有关,在风速测量时需要同时获得温度。
该激光雷达是利用参考通道信号强度
$ {N}_{R}(\lambda ,{\textit{z}}) $ 计算大气密度$ {N}_{A}\left({\textit{z}}\right) $ ,然后利用积分的方法计算得到温度$ T\left({\textit{z}}\right) $ :式中:
$ {{\textit{z}}}_{0} $ 为参考高度,一般取30 km以上;$ T\left({{\textit{z}}}_{u}\right) $ 和$ {n}_{A}\left({{\textit{z}}}_{u}\right) $ 分别为上边界高度上的大气温度和密度;$ R $ 为气体普适常数;$g\left({\textit{z}}\right)$ 为重力加速度。利用积分方法计算温度的准确度比较高。与钠荧光散射多普勒激光雷达一样,影响风速测量准确度的主要因素是激光中心频率的变化,影响温度和风速测量不确定度的主要因素是回波信号的信噪比。当激光中心频率变化1 MHz时,反演的风速偏差约为0.26 m/s。
-
与车载式钠荧光散射多普勒激光雷达一样,车载式532 nm瑞利散射多普勒激光雷达也由激光发射子系统、散射信号接收子系统、数据采集与控制子系统、数据处理分析子系统、车载平台子系统等组成,如图5所示。

Figure 5. Schematic diagram of 532 nm Rayleigh scattering Doppler lidar
在激光发射子系统中,一台功率为15 W、重复频率为30 Hz的532 nm脉冲激光器,通过种子注入的方式输出窄线宽的脉冲激光。为了消除环境因素对激光频率的影响,利用碘分子吸收光谱仪将种子激光器输出的激光频率稳定在吸收光谱的边缘上,稳定精度约为100 kHz。同时,532 nm脉冲激光器输出的激光也送入到碘分子吸收光谱仪,记录脉冲激光的透过率。采用1 m口径的接收望远镜收集大气散射信号。散射信号分为两部分,一部分用于测量40 km以上的高度范围,一部分用于测量40 km以下的高度范围。在测量40 km以上时,使用斩光器挡掉40 km以下信号部分。散射信号再分成两部分,一部分通过碘分子吸收光谱仪成为测量通道信号
$ {N}_{M}(\lambda ,{\textit{z}}) $ ,另一部分则是参考通道$ {N}_{R}(\lambda ,{\textit{z}}) $ 。然后由数据采集与控制子系统对信号强度进行记录,由数据处理分析子系统进行数据处理反演得到大气风场、温度、密度等廓线。车载式532 nm瑞利散射多普勒激光雷达包含了两套结构相同的激光雷达,每套安装在一辆改装的厢式卡车上,对不同的方向进行观测,实现提高探测高度范围和合成风场的目的,如图6所示。

Figure 6. Vehicle-mounted 532 nm Rayleigh scattering Doppler lidar
瑞利散射多普勒激光雷达主要性能参数见表2。
Parameters Value Transmitter Laser wavelength/nm 532.26 Laser power/W ~15 Repetition rate/Hz 30 Pulse duration/ns ~7 Beam divergence/mrad ~1 Receiver Telescope aperture/cm 100 Field of view/mrad ~2 Bandwidth of interference filter/nm 0.15 Table 2. Parameters of Rayleigh scattering Doppler lidar
-
2011年车载式钠荧光散射多普勒激光雷达研制完成后部署在中国科学院廊坊临近空间环境野外科学观测研究站进行观测。经过与流星雷达、中频雷达对比,验证了其可靠性,开展观测研究临近空间重力波活动、钠原子输送、垂直风扰动等[11,27-29]。为了对车载平台子系统进行改造并对激光雷达系统升级,2017年后该激光雷达转移到北京进行观测。在信号采集时,时间分辨率为1 min,距离分辨率率为0.077 km。在数据处理分析时,可以根据不同的应用目的,输出不同时空分辨率的结果。由于钠原子的空间分布不同,不同高度的荧光散射信号强度不同。通常在92 km左右,荧光强度最大,具有较高的信噪比。当时间分辨率为60 min,距离分辨率为1 km时,在92 km处钠原子数密度的测量不确定度约为0.1%,温度的测量不确定度约为0.3 K,风速测量不确定度约为1.0 m/s。钠荧光散射多普勒激光雷达测量结果如图7所示。


Figure 7. Measured sodium atom density, temperature, meridional wind and zonal wind at Beijing on day 292, 2020
2014年车载式532 nm瑞利散射多普勒激光雷达研制完成后先后在北京、青海、甘肃等多地进行长时间观测,经过与探空气球、卫星资料、再分析资料等对比验证后,开展了临近空间重力波、大气密度变化规律、大气温度变化规律、大气风场变化规律等研究。
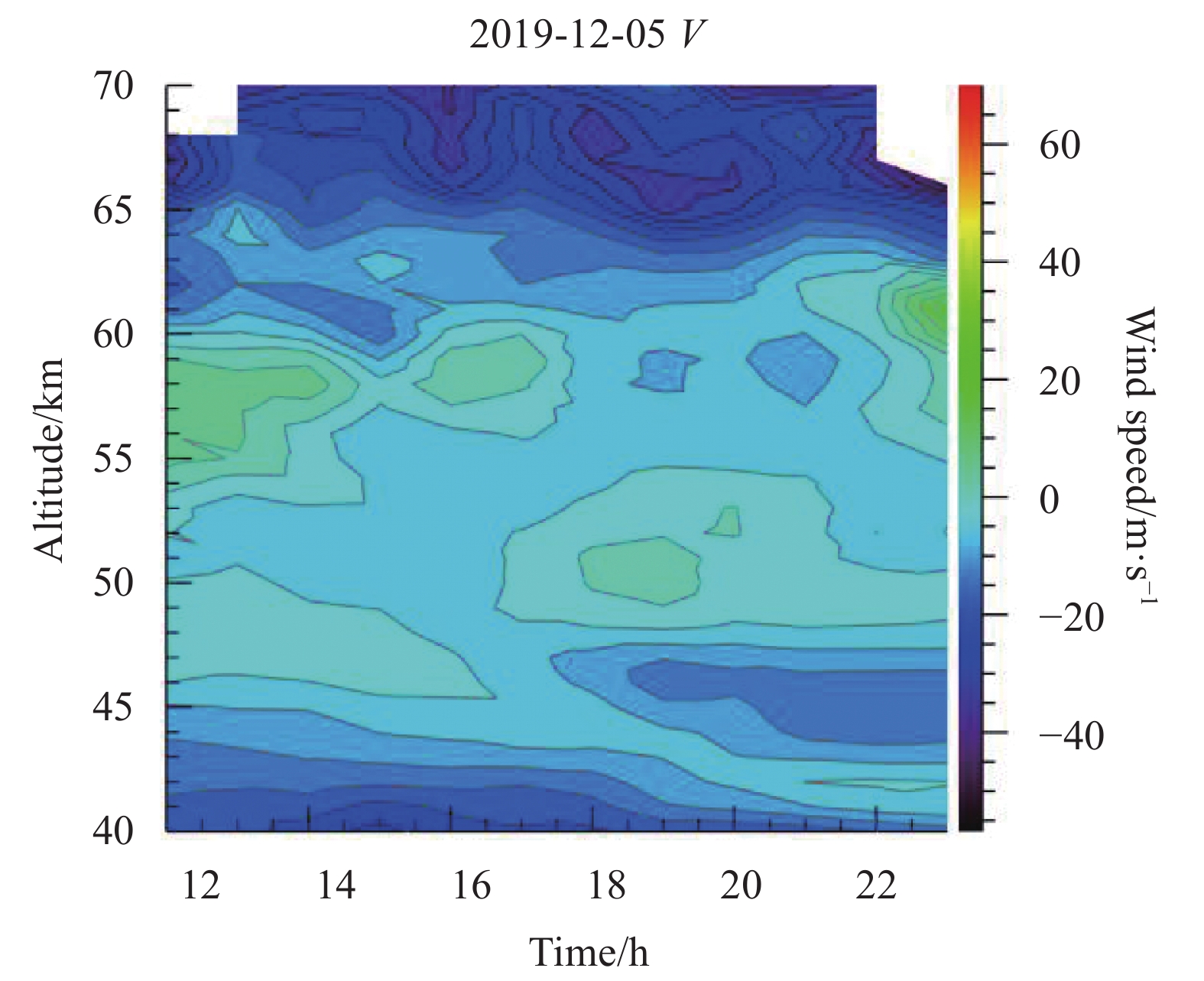
在信号采集时,时间分辨率为1/30 s,距离分辨率率为0.122 km。在数据处理分析时,可以根据不同的应用目的,输出不同时空分辨率的结果。由于瑞利散射信号强度随高度增加而减小,则测量不确定度随高度增加而变大。当时间分辨率为60 min,距离分辨率为1 km时,在40 km 处大气温度的测量不确定度约为0.2 K,风速的测量不确定度约为0.4 m/s;在70 km 处大气温度的测量不确定度约为1.5 K,风速的测量不确定度约为5.5 m/s。532 nm瑞利散射多普勒激光雷达测量结果如图8所示。


Figure 8. Measured temperature, meridional wind and zonal wind at Dunhuang, Gansu on Dec.5th, 2020 with 532 nm Rayleigh scattering Doppler lidar
-
文中介绍了用于临近空间环境探测的钠荧光散射多普勒激光雷达和532 nm瑞利散射多普勒激光雷达。钠荧光散射多普勒激光雷达以中间层顶区域的钠原子为示踪物,发射589 nm激光照射使其产生共振荧光,通过三频比率的方法获得75~105 km范围的大气温度和风场。一般地,在80~100 km范围内具有较高的测量精度。532 nm瑞利散射多普勒激光雷达通过发射532 nm激光,与大气分子碰撞产生瑞利散射,使用碘分子吸收光谱仪测量瑞利散射信号的多普勒频移和散射信号强度,得到温度和风场。
钠荧光散射多普勒激光雷达和532 nm瑞利散射多普勒激光雷达的联合使用,可以探测100 km以下范围内的大气温度和风场,对于研究临近空间环境,掌握其变化规律,开发临近空间环境模型具有重要的应用价值。
目前,用于临近空间环境探测的设备还比较少,实测数据还比较稀缺。随着激光技术的发展,更多波长可以选择应用在临近空间的环境探测中[30-31]。除了地基激光雷达外,更多的基于火箭平台、浮空平台和卫星平台等的探测设备也将应用于临近空间环境的探测[32-33]。多源数据的联合使用将会推动临近空间环境研究的进一步发展。
Near space Doppler lidar techniques and applications (Invited)
doi: 10.3788/IRLA20210100
- Received Date: 2021-02-09
- Rev Recd Date: 2021-02-18
- Available Online: 2021-05-12
- Publish Date: 2021-03-15
-
Key words:
- near space /
- Doppler lidar /
- wind field /
- temperature
Abstract: A vehicle-mounted sodium fluorescence scattering Doppler lidar and a vehicle-mounted 532 nm Rayleigh scattering Doppler lidar have been developed for wind and temperature observations in near space region. Three-frequency-ratio Doppler measurement method was used to obtain wind and temperature from 80 km to 100 km in the sodium fluorescence scattering Doppler lidar. And Iodine absorption line edge technique was employed to measure wind speed below 70 km, integration method was used to measure temperature below 80 km in the 532 nm Rayleigh scattering Doppler lidar. When the range resolution was 1 km and the temporal resolution was 1 h, the uncertainties of measured temperature and wind speed were about 0.2 K and 0.4 m/s at 40 km, 1.5 K and 5.5 m/s at 70 km, 0.3 K and 1.0 m/s at 92 km. The two lidars have carried out long-term observations in Beijing, Qinghai, Gansu. The data are used for near space environmental characteristics researches.
































































































 DownLoad:
DownLoad: