







-
运动平移台为一典型的光机电设备,用于承载标准靶分系统(可看作一大型平行光管),实现标准靶分系统垂直升降、水平横移、方位旋转和俯仰旋转的4维运动,使标准靶分系统的光轴与不同高度、不同口径的被测红外成像设备的光轴能够准确对准,以完成被测红外成像设备全像元波段响应、调制传递函数、噪声等效温差等性能参数的测试。为便于两个光轴的精确对接并能准确测试红外成像设备的性能参数,需要确保垂直轴升降过程中平移台台面的晃动量,同时保证方位和俯仰两维运动对光管光轴不产生耦合,因此,对平移台的运动精度指标提出了严格要求。
在对±3°方位(俯仰)轴调整的过程中,测试引起俯仰(方位)方向光轴变化量,发现方位调整组件旋转时会对负载光管的俯仰方向光轴产生偏移,且偏移量远大于指标要求;俯仰调整组件绕俯仰轴旋转过程中亦会对负载光管产生较大的方位指向偏移量,而且两个方向偏移量仅通过机械加工与装调均难以消除,因此需要对其进行误差建模,找出偏移量变化规律以及偏移量与各个误差源的关系,并通过软件补偿方法来提高其精度。建立指向误差修正模型的方法通常有以下3种:(1)分项误差修正方法,关键是确定各单项误差源之间的相互关系,在此基础上建立模型,存在误差因素难以考虑周全,误差规律较难全面准确描述的问题[1];(2)基于实测数据的空间曲面(曲线)拟合方法,该方法可以揭示出人们还没有认识到的误差原因和变化规律,具有更大的普遍性,但难点在于如何根据大量实验数据样本准确得到最佳的空间曲面拟合函数;(3)基于多体系统运动学的误差建模方法,该方法把不同结构、运动控制关系的设备抽象为多体系统,每一项综合误差都可以在各个体间找到来源,易于描述误差规律并建立模型[2]。这3种方法在大型光学望远镜、射电望远镜、光电探测设备[3-4]、工业机器人[5]、光电稳定跟踪平台[6]等误差建模与补偿中均得到了广泛应用。
针对该问题,基于多体系统理论建立了平移台具有明确物理意义的指向偏差修正模型,根据建立的模型和实测的偏差数据,采用最小二乘优化算法估计得到了模型中参数,并对补偿前后的两个方向光轴指向偏移量进行了仿真验证,最后实测得到了满足指标的偏移量数据,验证了误差建模与修正方法的正确性。
-
运动平移台的实物图如图1所示,主要由机械台体、控制柜和控制计算机这3部分组成。其中,机械台体包括垂直升降组件、水平横移组件、方位调整组件、俯仰调整组件和支撑底座5部分,采用模块化设计,从下到上依次为支撑底座、横移组件、升降组件、方位旋转组件和俯仰旋转组件,各组件模块可独立运动,组合后实现4个自由度的运动调整。

Figure 1. Actual picture of remotion platform
根据平移台结构组成及工作原理,升降平台组件通过伺服电机和两台螺旋升降机提供动力,4根导向柱辅助支撑的方式以实现在大范围升降(负载光轴升降范围1.5~3.8 m)过程中保证平移台的稳定性,升降平台在大行程运动中会出现仅靠装调难以完全消除的垂直度误差,进而将影响负载光轴的指向变化。方位、俯仰旋转组件转动过程中存在轴系回转误差,它们的旋转轴与负载标准靶分系统的光轴之间存在垂直度误差、相交度误差、光学装调误差,这些误差也将导致负载光轴的偏移。因此,通过进行误差源分析,把±3°方位(俯仰)轴调整过程中引起的俯仰(方位)方向光轴指向变化量认定为由于方位、俯仰旋转轴和负载光轴3者不垂直正交引起的交叉耦合以及升降平台垂直度误差共同导致的光轴指向的偏移量。
根据多体系统的运动学误差建模过程,首先需要得到运动平移台的拓扑结构,如图2所示。然后建立各体坐标系,负载标准靶分系统5体的体坐标系原点位于其重心,各个坐标轴定义为:光轴沿出光口方向为x轴,垂直向上为y轴,z轴与x、y轴构成笛卡尔右手坐标系;方位旋转平台3体和俯仰旋转平台4体的体坐标系原点在各自的回转中心,各坐标轴与5体坐标系的坐标轴平行;升降平台2体和水平横移平台1体的体坐标系原点在各自的几何中心,各坐标轴与5体坐标系的坐标轴平行;支撑底座0体作为惯性坐标系,原点位于几何中心,各坐标轴也与5体坐标系的坐标轴平行。
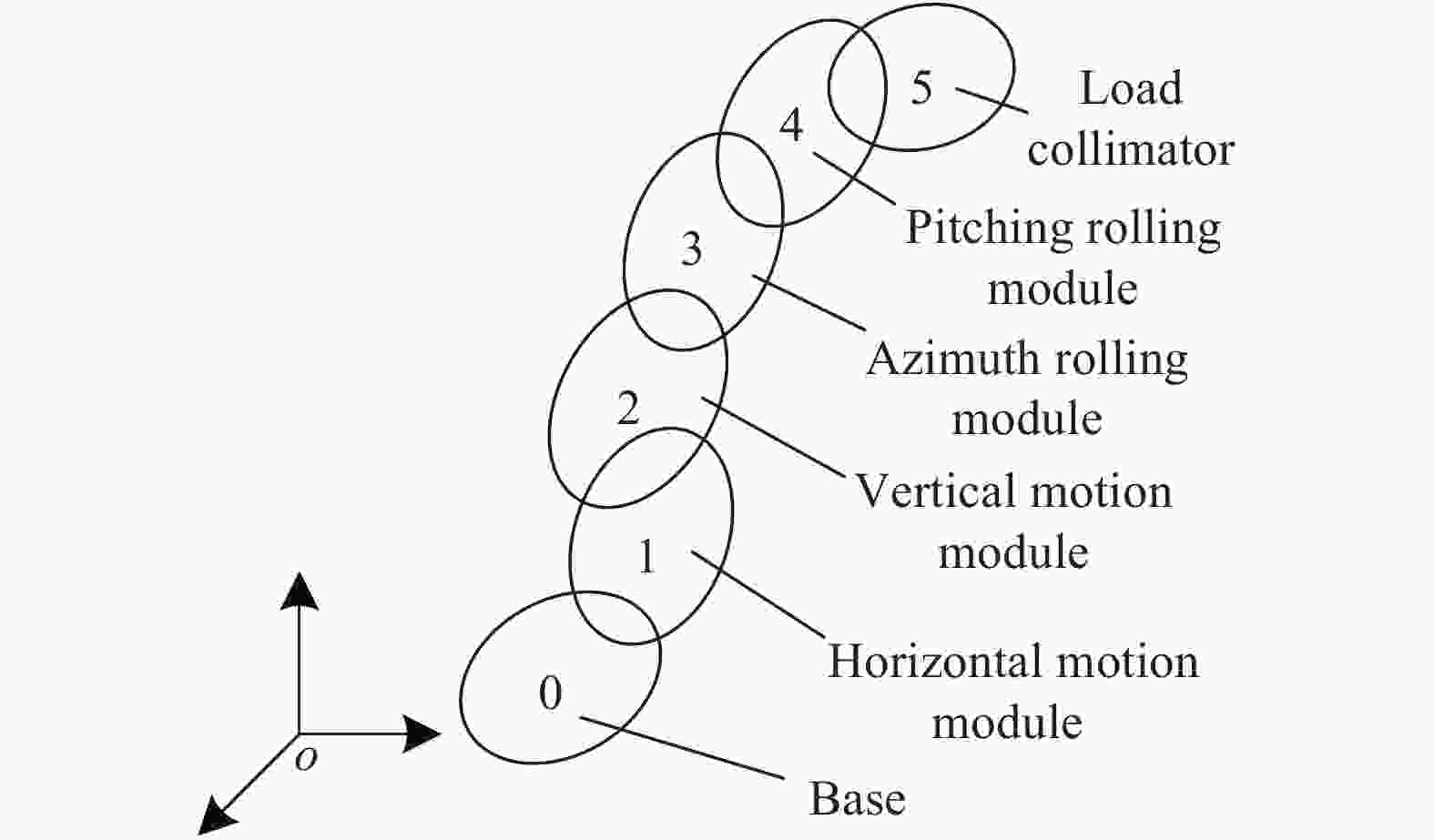
Figure 2. Topology structure of remotion platform
由运动平移台的使用原理和各体之间的位置关系及运动过程可将平移台的各项误差分为位置误差与运动误差,各项误差的定义及分类如表1所示。
Sort of error Error item Error signification Position error ${e_{\delta z}}$ Horizontal module error(along z axis) ${e_{\delta y}}$ Vertical module error(along y axis) ${\Delta _{2x}}$ Vertical module perpendicularity error
(around x axis)${\Delta _{2z}}$ Vertical module perpendicularity error
(around z axis)${e_A}$ Azimuth module coder setting and measurement error ${\Delta _{4x}}$ Pitching module perpendicularity error (around x axis) ${\Delta _{4y}}$ Pitching module perpendicularity error (around y axis) ${e_E}$ Pitching module coder setting and measurement error ${\Delta _{5y}}$ Load collimator setting error ${\Delta _{5z}}$ Load collimator setting error Motion error ${e_{4x}}$ Pitching module shafting gyration ${e_{4y}}$ Pitching module shafting gyration ${e_{3x}}$ Azimuth module shafting gyration ${e_{3z}}$ Azimuth module shafting gyration Table 1. Meanings of each error item
根据上述分析,对运动平移台承载的标准靶分系统的光轴指向在底座惯性坐标系内进行描述。定义负载光轴在标准靶分系统坐标系内的单位指向矢量为
${\boldsymbol{r}} = {[\begin{array}{*{20}{c}} 1&0&0 \end{array}]^{\rm{T}}}$ ,在无误差的理想情况下,负载光轴在底座平台坐标系内的单位指向矢量为${{\boldsymbol{r}}_i} = {[\begin{array}{*{20}{c}} {{r_{xi}}}&{{r_{yi}}}&{{r_{zi}}} \end{array}]^{\rm{T}}}$ ;在有误差的实际情况下,负载光轴在底座平台坐标系内的单位指向矢量为${{\boldsymbol{r}}_a} = $ $ {[\begin{array}{*{20}{c}} {{r_{xa}}}&{{r_{ya}}}&{{r_{za}}} \end{array}]^{\rm{T}}}$ 。则,${{\boldsymbol{r}}_i}$ 与${\boldsymbol{r}}$ 的转换关系表示如下:各个体之间通过运动副连接在一起,其运动关系可以用坐标变换矩阵来描述。各个相邻体之间的坐标转换矩阵
${\boldsymbol{L}}$ 分别为:式中:
${\delta _z}$ 、${\delta _y}$ 、$A$ 和$E$ 分别为横移量、升降量、方位角和俯仰角;${l_1}$ 、${l_2}$ 和${l_3}$ 分别为升降平台、方位旋转平台、俯仰旋转平台、负载光管各体之间离坐标系原点的距离。则理想情况下光轴矢量为:由该式可知,光轴指向矢量只与各体之间转动角度有关,而与各体之间的位移量无关。同理,可推导得出有误差情况下各个相邻体之间的坐标转换矩阵
${\boldsymbol{L}}'$ 。这里以俯仰旋转平台相对方位旋转平台的位姿变换关系为例进行描述。两体之间的误差主要由俯仰旋转平台误差、俯仰平台编码器误差两部分组成。俯仰旋转平台误差包括俯仰平台组件与方位旋转组件的不垂直度误差、相交度误差以及俯仰旋转平台的轴系回转误差;俯仰编码器误差包括编码器的安装误差与测量误差。则两坐标系间的实际变换矩阵为:式中:
$E' = (E + {e_E})$ 。同理,也可以得出有误差情况下其他各体之间的转换矩阵。则实际情况下负载光轴的指向矢量表示如下:
将各式代入公式(6)中,考虑到各误差项以及方位、俯仰转动角度均为小量,经过简化后可得到:
则,指向误差的方位分量
$\delta {\theta _y}$ 和俯仰分量$\delta {\theta _z}$ 可表示为: -
在对运动平移台的上述这个精度指标进行检测时,发现方位旋转组件或俯仰旋转组件旋转时会对俯仰或方位方向的负载光轴指向产生影响,且偏移量远大于指标要求,因此需要对其进行修正,一种方法是在加工和装配时尽量提高其加工和安装精度,这种方法成本高、周期长,另一个经济有效的方法是建立误差修正模型,通过软件补偿的方法来提高精度[7-8]。
将
${{\boldsymbol{r}}_i}$ 和${{\boldsymbol{r}}_a}$ 代入指向误差修正模型公式(8)中,可得:式中:
${a_i}$ 为待辨识系数;${a_1} = {\Delta _{4y}} + {e_A}$ ;${a_2} = - {\Delta _{4x}} - {e_{3x}}$ ;${a_3} = {e_{4y}} + {\Delta _{5y}}$ ;${a_4} = {\Delta _{2z}}$ ;${a_5} = - {\Delta _{2x}}$ ;${a_6} = {e_E} + {\Delta _{5z}} + {e_{3z}}$ ;各个系数的含义见表1。由公式(9)也可看出,方位旋转平台转动时将在负载光轴的俯仰方向产生偏移,由于转动角度范围较小,
$\sin A \approx A,\cos A \approx 1$ ,偏移量与转动角度基本上成线性关系,而在负载光轴方位方向的影响可以忽略;俯仰旋转平台转动时只影响到负载光轴的方位指向变化,同样方位指向偏移量随着俯仰转动角度近似为线性变化。对指向误差修正模型中未知系数
${a_i}$ 的求解方法为,设计指向误差测试实验得到指向误差的实测数据序列${\delta _\theta }$ ,然后得到在不同方位、俯仰角度输入下修正模型中的指向误差计算值序列${{\overset\frown{\delta }} _\theta }$ ,以两者偏差最小为原则构建如下式所示的目标函数:采用最小二乘线性估计时,残余误差的大小反映了修正模型的精度,当较小且表现为白噪声时,可以得到较高的未知参数估计精度,文中采用最小二乘法优化算法优化该目标函数,估计得到模型中的未知参数。
得到待辨识系数
${a_i}$ 后,即可通过平移台控制软件补偿的方法来提高其精度。 -
构建实验系统,在进行运动平移台方位(俯仰)旋转组件旋转过程中引起俯仰(方位)方向光轴指向偏移量的误差测试,测试的设备包括光电自准直光管(精度为0.5″),高精度平面镜(1级),电子水平仪(精度为1″)和平移台控制计算机。
实验测试方法及步骤如下:
(1)将负载固定于运动平移台俯仰旋转组件的基准安装面上,正常连接平移台控制计算机、控制柜和运动平移台,并加电开机;平面反射镜垂直安装于俯仰旋转组件基准台面上(即负载安装面),法线平行于俯仰轴,转动俯仰轴,光电自准直光管测量俯仰轴运动引起的负载光轴方位方向指向误差。自准直光管安装在良好的隔震平台上,调整光管高度,使其光轴垂直平面镜,其十字叉丝位于视场中心,清除光电自准直光管显示偏差,记录此时光管读数
${c_0}$ ;(2)利用平移台控制软件控制俯仰旋转组件绕俯仰轴从零位开始按0.5°步长运动至下限位处,然后再向上运动至上限位处,记录俯仰轴每次运动到位后自准直光管的读数
${c_i}$ ;(3)将高精度电子水平仪安装于负载安装面另一侧,转动平移台方位轴,测量方位轴旋转引起的负载光轴俯仰方向的指向误差。设置电子水平仪为相对水平测试模式并清零,记录此时电子水平仪的示数
${e_0}$ 。利用平移台控制软件以0.5°粗调步长,控制平移台方位旋转组件绕方位轴从左限位运动到右限位处,记录方位轴每次运动到位后电子水平仪的读数${e_i}$ ;(4)测试完毕,分别统计
${c_i} - {c_0}$ 和${e_i} - {e_0}$ 的最大值作为方位方向和俯仰方向的偏移量误差。实验测试数据见表2,方位指向最大偏差为176.1″,俯仰方向最大偏差为18″,均远超指标要求。Pitching angle/(°) Autocollimation reading/(″) Azimuth angle/(°) Gradienter reading/(″) −3.0 85.6 −3.0 0 −2.5 70.6 −2.5 −1.5 −2.0 56.4 −2.0 −3.0 −1.5 42.4 −1.5 −4.5 −1.0 28.5 −1.0 −6.0 −0.5 14.7 −0.5 −7.5 0 0.2 0 −9.0 0.5 −14.2 0.5 −10.5 1.0 −29.1 1.0 −12.0 1.5 −44.5 1.5 −13.5 2.0 −59.4 2.0 −15.0 2.5 −75.2 2.5 −16.5 3.0 −90.5 3.0 −18.0 Table 2. Actual test data
利用实验测试数据对指向误差修正模型中的参数进行估计,得到误差参数为:
由该式也可看出,升降平台的垂直度误差,俯仰旋转平台与方位旋转平台的垂直度误差以及方位旋转平台的轴系回转误差是影响方位、俯仰指向偏移的主要误差因素,其次是负载光管的安装误差和方位、俯仰旋转平台的编码器误差。升降平台的垂直度误差主要影响俯仰方向的光轴偏移量,这也说明了测试时升降平台处于不同高度,方位旋转过程中引起的俯仰方向偏移量的测试数据有一定差异的原因。
-
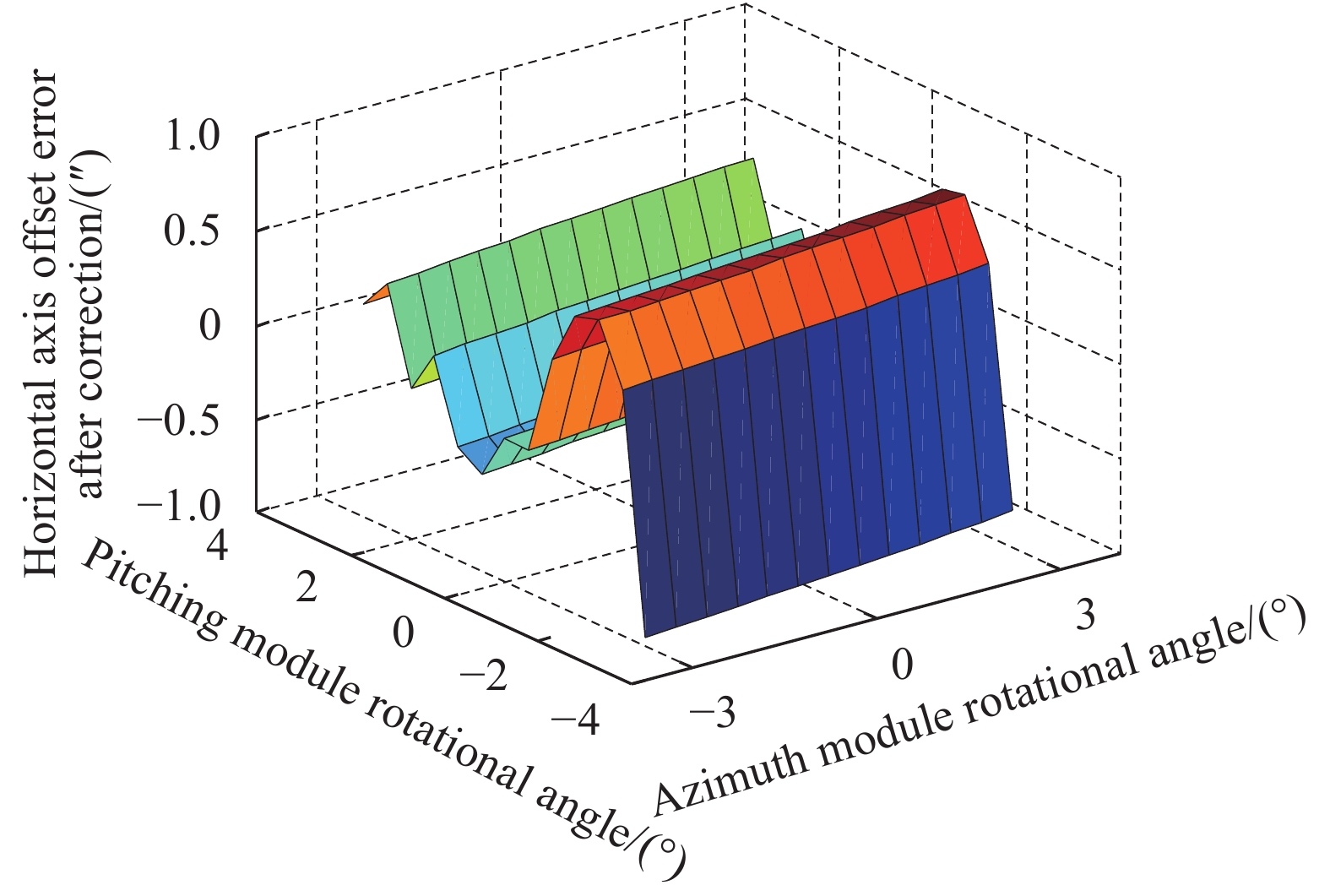
得到指向误差修正模型中误差系数后,可对修正的效果进行仿真,图3~图6分别为修正前、后俯仰平台和方位平台旋转引起的方位和俯仰方向的指向误差偏移量。

Figure 3. Horizontal axis offset error along with pitching rotation angle before error correction
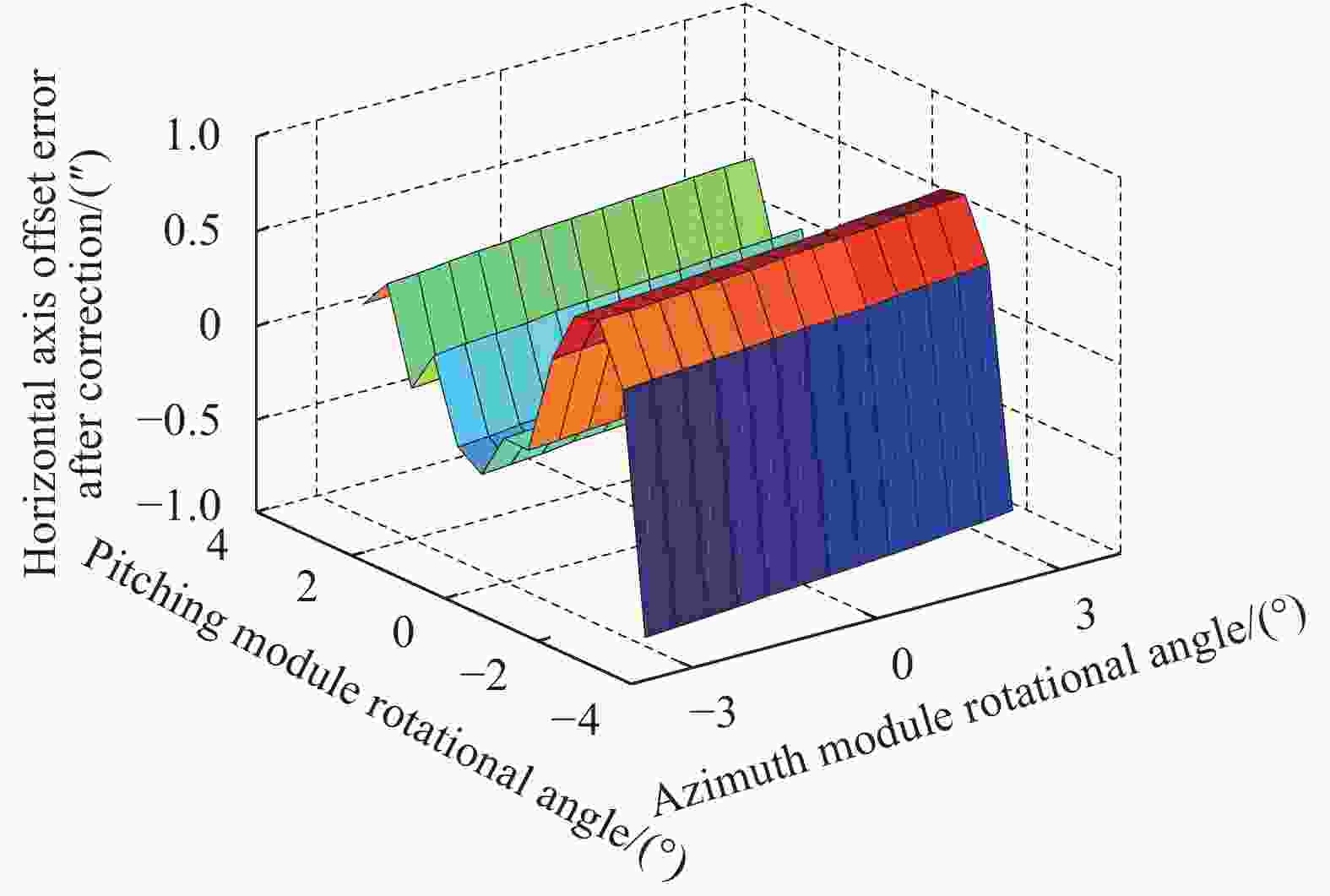
Figure 4. Horizontal axis offset error along with pitching rotation angle after error correction
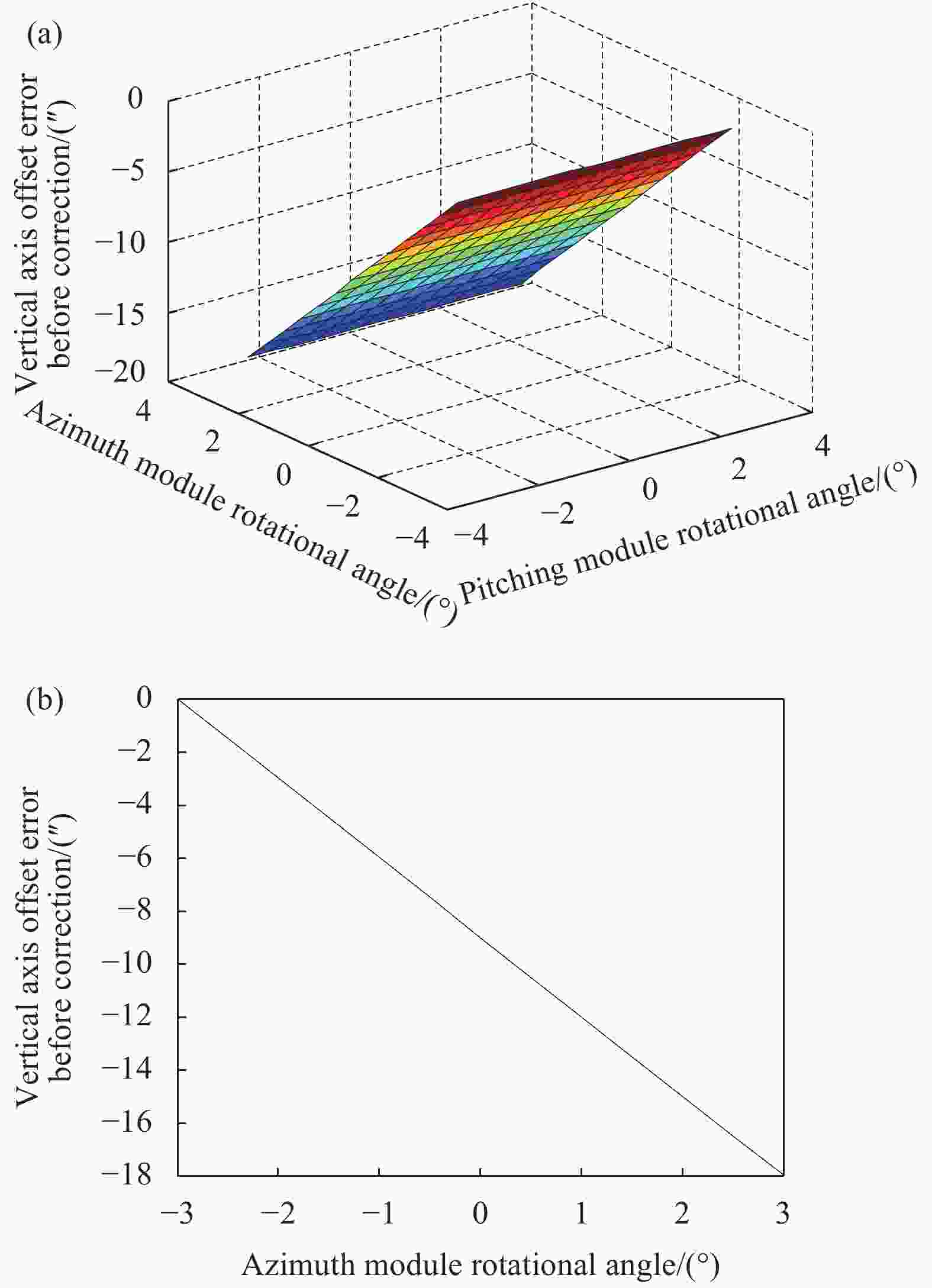
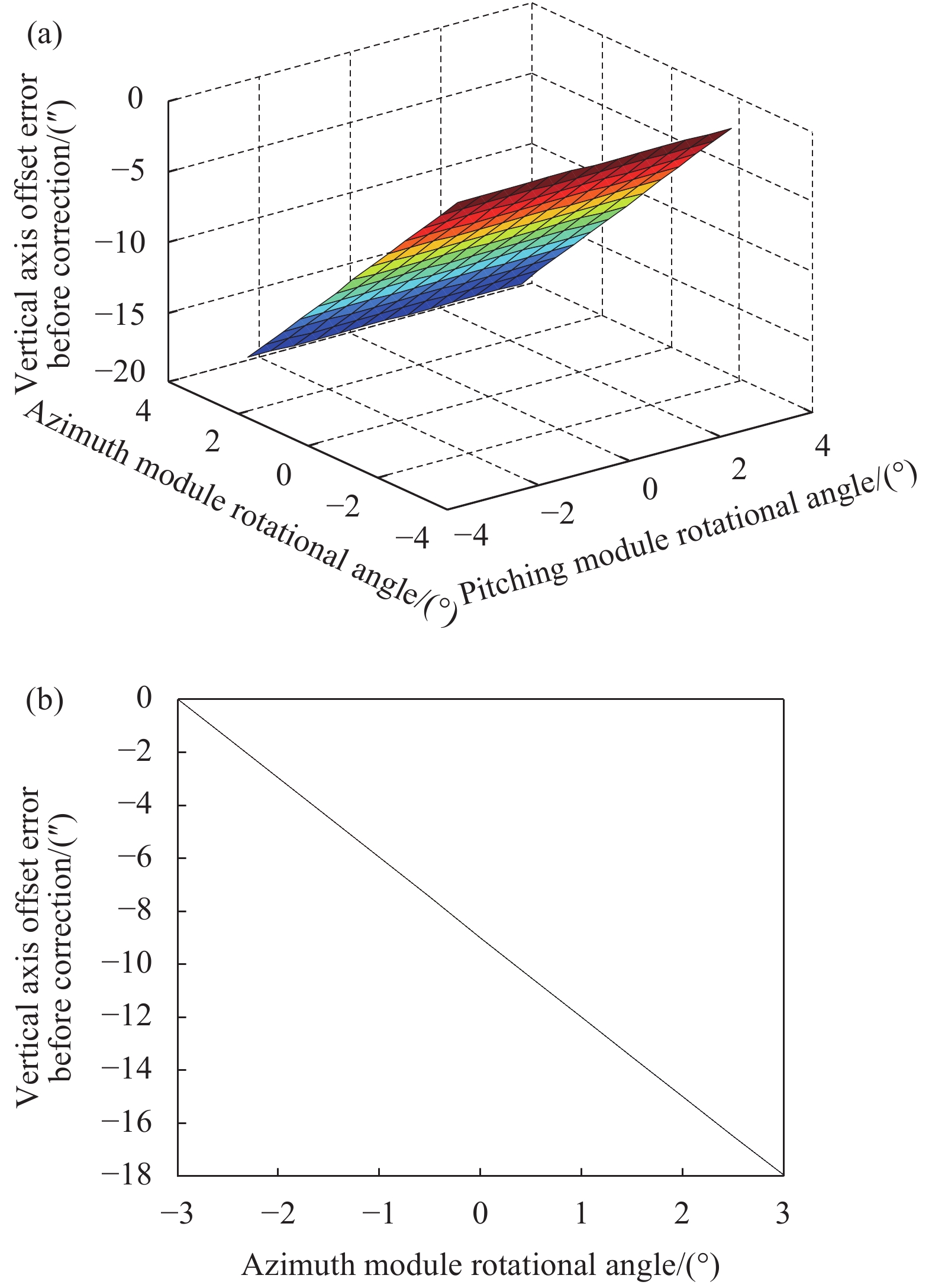
Figure 5. Vertical axis offset error along with azimuth rotation angle before error correction

Figure 6. Vertical axis offset error along with azimuth rotation angle after error correction
由图3和图4可知,光轴方位指向偏差与俯仰转动角度成线性关系,这与指向误差修正模型
$\delta {\theta _y}$ 中推导得到的变化规律是一样的,也说明了修正模型的准确性;修正前俯仰平台旋转引起的方位指向误差最大为176.1″,修正后指向偏差减小到1″,修正效果良好。由图5和图6可知,光轴俯仰指向偏差与方位平台转动角度也成线性关系,这与指向误差修正模型
$\delta {\theta _z}$ 的变化规律是一致的。修正前,方位平台旋转引起的俯仰指向误差最大为18″,经过修正,该误差减小至9″,但虽然指向精度提高了一倍,还存在一个固定偏差较难消除。经分析,该固定偏差为系统误差,与误差模型简化时的非线性项或高阶量有关,可以在被测设备光轴与光管光轴实际对准过程中在图像中加以消除。 -
在平移台控制软件中导入建立的修正模型后,利用前述的实验测试设备,对平移台光轴指向在方位组件和俯仰组件旋转过程中引起的俯仰和方位方向的偏移量误差进行了重新测试,测试步长设为1°,共测试了13组数据,如表3所示。由表可知,俯仰组件在±3°调整过程中,引起的光轴方位向最大偏移误差为3.6″,方位组件在±3°旋转过程中引起的俯仰方向光轴指向偏差最大为6″,均满足了指标要求。
Pitching angle/(°) Autocollimation reading/(″) Azimuth angle/(°) Gradienter reading/(″) 0 0.1 0 −753 −1.0 1.7 −1.0 −755 −2.0 1.9 −2.0 −755 −3.0 1.8 −3.0 −757 −2.0 1.6 −2.0 −755 −1.0 1.2 −1.0 −755 0 0.2 0 −753 1.0 0.2 1.0 −754 2.0 1.1 2.0 −753 3.0 3.7 3.0 −751 2.0 2.2 2.0 −754 1.0 1.5 1.0 −755 0.0 1.6 0.0 −754 Table 3. Actual test data after error correction
-
针对运动平移台检测时±3°方位(俯仰)轴调整过程中引起的俯仰(方位)方向光轴指向偏移量指标超差的问题,提出了软件补偿方法,建立了静态指向误差修正模型。通过仿真分析得到,经过模型修正后,方位指向偏移量由176.1″减小到1″,俯仰指向精度由18″提高至9″;误差修正后实测数据表明:光轴方位和俯仰方向指向偏差最大值分别为3.6″和6″,满足了指标要求。该误差建模与补偿方法已经在该装备的检测中得到了实际应用,也可应用于类似光机电装备的精确测试。
Modeling, test and correction of static pointing error for remotion platform
doi: 10.3788/IRLA20210161
- Received Date: 2021-03-12
- Rev Recd Date: 2021-06-03
- Publish Date: 2021-12-31
-
Key words:
- remotion platform /
- optical pointing offset /
- error test /
- error correction /
- multi-system modeling
Abstract: According to the axis offset, arosed by rotation of azimuth or pitching axis, was biggish than index in the test of certain remotion platform, the error sources were analyzed comprehensively. And then, a kind of error test and compensation plan was proposed based on this, multi-body kinematics theory was used to setup correction model of axis pointing deviation of the remotion platform. Subsequently, the test experiment of pointing deviation was designed to gain the actual pointing error, the unknown parameter of the correction model were obtained by measured data. Finally, model simulation and experimental test results after compentation both show that the horizontal axis offset error has been reduced from 176.1″ to 1″, the vertical axis pointing accuracy has been improved from 18″to 9″ after correction of error sources, and the error test and correction method has been successfully used in the actual test of the remotion platform, which satisfied the normal requirements.












































 DownLoad:
DownLoad: