







-
激光测风雷达在大气风场研究、机场风切变预警,飞机尾流探测、风力发电[1-3]等领域有着广泛的应用。相干激光测风雷达原理是基于多普勒效应,对多角度波束激光分别进行径向风速度矢量的测量,通过反演得到风场分布信息。脉冲相干激光测风雷达波束径向回波中频信号处理算法主要有:快速傅里叶变换(FFT)、克拉默-拉奥下界算法(CRLB)、脉冲对算法、多脉冲对算法(poly-pulse pair)和最大似然算法(ML)等[4]。其中快速傅里叶变换方法主要是根据雷达距离分辨率要求,使用固定长度距离门划分回波时域信号[5-9],再对每个距离门信号进行FFT并计算出该距离门的中频值,最后根据多普勒频移公式计算出波束在该距离段的径向风速度值。
划分固定距离门的方法简单,容易实现,是目前国内外大多数型号激光测风雷达使用的方法。美国FiberTek公司2011年研发了用于观测飞机湍流和尾流的脉冲激光测风雷达[10],其距离分辨率40~120 m,由划分的距离门长度决定,能够在0.1 m/s的风速分辨率情况下实现20~200 m/s的风速测量。法国Leosphere公司研制的Windcube系列商用激光测风雷达主要用途是飞机尾涡流探测、机场空中交通优化、风能应用、大气研究、气象监测等[11],Windcube采用固定长度划分距离门,距离分辨率可选,最小25 m,风速测量误差优于0.5 m/s[12-13]。美国Lockheed Martin公司于2015年研发的Wind Imaginer激光测风雷达系统主要应用于风场扫描和涡流探测[14],该系统采样率750 MHz、重复频率3~20 kHz、脉宽50~400 ns,距离分辨率优于15 m。西南技术物理研究所研发的某型号激光测风雷达主要应用于机场风切变预警,距离分辨率可调,最小30 m,风速均方差0.42 m/s,测程10 km[15]。
激光测风雷达回波信号与大气风场的波动相关,其频率是时刻变化的。使用传统的划分固定长度距离门并进行FFT的方法处理信号必然会存在信号的非整周期截断,产生频谱泄露造成频率估计误差,导致系统风速测量精度下降,进而限制了距离分辨率的提高。针对上述问题,提出一种基于整周期搜索的自适应距离门划分方法,该方法的特点是对激光测风雷达回波信号按整周期进行划分,距离门长度与信号中频自动适应,减少了因频谱泄露产生的误差,在保证测量精度的同时缩短了距离门长度。与现有型号激光测风雷达相比,实现了激光测风雷达的测量精度和距离分辨率的提升。
文中通过仿真实验分析了固定距离门方法和自适应距离门方法的距离门划分结果、频率估计误差和距离分辨率。实验使用自适应距离门划分方法处理相干多普勒激光测风雷达获取的转盘与风场回波信号,将转盘转速、径向风速度测量结果与使用传统固定距离门方法的测风激光雷达的测量结果进行了比较与分析。
-
相干激光测风雷达的原理是激光信号经移频器和分束器后,一路作为本振光,另一路经过调制和放大后发射到大气中。激光与大气相互作用产生后向散射回波信号,由光学天线接收,与本振光混频后被光电探测器接收转换为电信号[16]:
式中:α为光电探测器的光电转换因子;As为回光幅度;ALo为本振光幅度;fs为信号光频率;fLo为本振光频率;φs为信号光相位;φLo为本振光相位。对光电探测器输出的电信号进行滤波和放大,使用满足奈奎斯特采样定理的采样率进行数据采样,得到回波信号的采样序列:
式中:N为总采样点数;ΔT为采样间隔。对采样序列x(n)进行区间划分,划分得到的区间称为距离门。对每一个距离门做FFT,获得频率估计结果。根据多普勒效应计算气溶胶粒子在激光径向上的速度v:
式中:
${f_d} = {f_s} - {f_{Lo}}$ ,为回波信号的多普勒频移;λ为激光波长。 -
固定距离门划分方法的特点是划分出的所有距离门长度均相同,距离分辨率与距离门长度相等。对每个距离门做FFT得到频率估计值,再由多普勒频移公式计算得到径向风速。
取一段激光测风雷达回波信号,使用固定距离门方法进行处理,结果如图1所示。

Figure 1. Fixed range-gate method processing wind lidar signal. (a) Time domain signal is divided with fixed range-gate; (b) Calculation result of wind speed
固定距离门划分信号的优点是方法简单,容易实现,缺点是划分距离门时会存在信号的非整周期截断,进行FFT计算时往往存在频谱泄露问题,造成频率测量误差。另外,固定距离门方法划分的距离门长度与风速大小无关,单个距离门出现的风速变化无法在计算结果体现,计算结果中会丢失部分风场细节信息。
-
自适应距离门方法的特点是距离门长度与信号频率自适应,并且实现了信号的整周期截断,减少了频谱泄露产生的误差,提高了频率估计精度。该方法主要步骤是整周期搜索。整周期搜索算法的作用是提取出信号所有的整周期,依据整周期搜索结果获取频率突变点,根据频率突变点和整周期分界点进行距离门划分,划分出的距离门长度较短,提高了距离分辨率。
-
整周期搜索算法的主要作用是搜索到回波信号中所有的整周期分界点。电力谐波分析中通常使用同步采样方法,令采样与信号频率同步变化以实现整周期采样,获得信号完整周期[17]。同步采样方法的缺点是对于频率变化的信号,采样率无法与信号频率同步。
浙江大学蔡忠法等提出一种与初始值比较的整周期搜索方法,用于提取电力谐波信号的整周期[17],实现对非同步采样数据中得到同步采样数据。激光测风雷达回波信号受激光器、大气波动等引起的低频噪声影响,整周期分割点处信号幅值不一定在初始值附近,因此与初始值比较的整周期搜索方法不适合用于处理激光测风雷达回波信号。
该整周期搜索方法是从信号采样序列x(n)的最后一个数值开始,以初始值x(0)做为阈值,每一个数值与x(0)进行比较,当x(0)<x(1)时,搜索到满足x(k−1)>x(0),x(k)≤x(0)的k值,认为x(k−1)是整周期采样点;x(0)>x(1)时,搜索到满足x(k−1)<x(0),x(k)≥x(0)的k值,同样认为x(k−1)是整周期采样点。使用参考文献[17]中提出的整周期搜索方法对部分风场回波信号进行整周期搜索,结果如图2(a)所示。
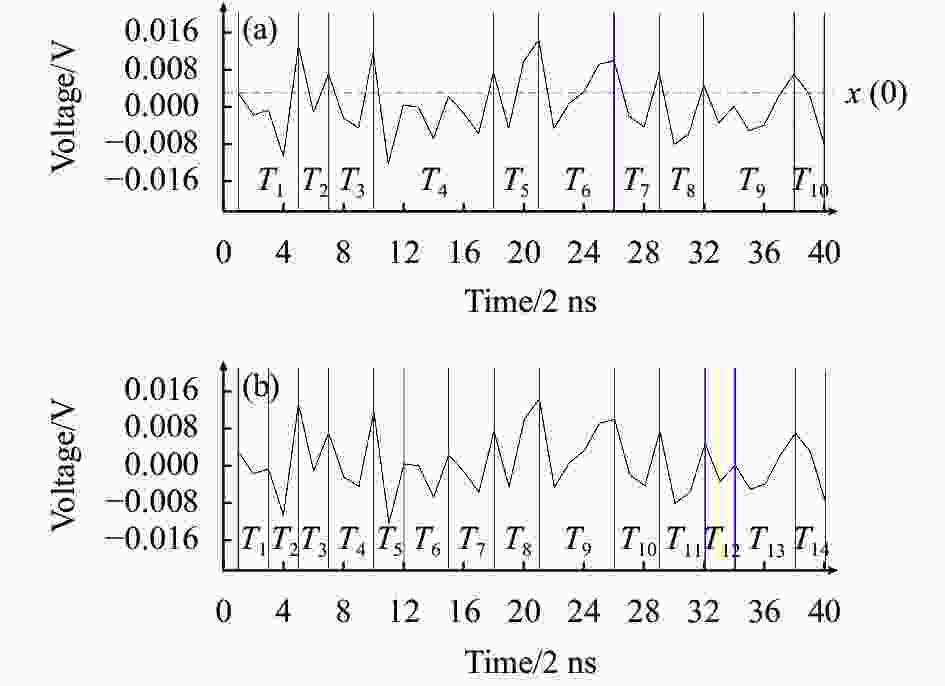
Figure 2. Results of full cycle search. (a) Results of unimproved full cycle search algorithm; (b) Results of improved full cycle search algorithm
图2(a)中T1~T10是搜索出的整周期信号,其中T1、T4和T9区间内有多个整周期没有被搜索到。
为了解决与初始值比较的整周期搜索方法产生的整周期遗漏的问题,文中提出一种以极值点作为周期开始点的整周期搜索算法。第一步是对s(n)进行二值化,将激光测风雷达回波信号的离散采样序列记为s(n),定义离散序列b(n),初始值b(0)=0。
从点s(1)开始搜索,符合公式(4)的点标记为1,即b(k)=1,符合公式(5)的点标记为−1,即b(k)=−1。符合公式(4)和(5)的条件点根据公式(6)赋值:
整周期搜索算法的第二步是对信号进行整周期划分。搜索b(n)序列中所有的上升沿与下降沿,若s(0)<s(1),使用b(n)中的上升沿对s(n)进行划分;若s(0)>s(1),使用b(n)中的下降沿对s(n)进行划分。使用改进的整周期搜索方法重新对风场回波信号进行整周期搜索,结果如图2(b)所示。
与图2(a)中的整周期搜索结果相比,改进的整周期搜索算法能够提取出信号所有的整周期。
-
信号单个周期采样点数Ns与采样率Fs的关系为:
回波信号的频率与单个整周期内的采样点数成反比例关系。根据采样率和回波信号频率范围,得Ns的取值范围:
式中:fmin为回波信号最小频率;fmax为回波信号最大频率,依据Ns的值粗略判断信号频率范围,进一步找到频率突变点。对二值化离散序列b(n)进行处理,得到每个周期内的采样点个数的离散序列p(n):
式中:p(n)为周期n中采样点的数量。使用相邻的整周期内采样点数发生突变的点初步划分距离门,再对超过距离分辨率要求的距离门进行等间隔的整周期划分,至此自适应距离门划分过程结束。
-
实验使用的激光测风雷达系统[15]的工作波长1550 nm,采样率500 MHz,中频80 MHz,脉宽200 ns,频率测量范围40~120 MHz,对应风速范围−31~31 m/s (见表1)。
Parameters Value Wavelength/nm 1550 Sample rate/MHz 500 Range resolution/m 30/50/75/100 Maximum detection range/km 10 Intermediate frequency/MHz 80 Pulse width/ns 200 Wind speed range/m·s−1 −31~31 Dimension/mm3 ≤φ420×700 Pointing precision/(°) 0.1 Table 1. Parameters of wind lidar system
生成频率100、40、80、20、60 MHz,信噪比−1 dB的仿真变频信号,使用自适应距离门方法和固定距离门方法(距离分辨率设置30 m)进行距离门划分(见图3)。

Figure 3. Results of range-gate division. (a) Results of fixed range-gate division; (b) Results of adaptive range-gate division
仿真信号距离门划分结果表明,固定距离门方法划分的距离门与信号频率变化无关;自适应距离门方法能够识别出频率突变点t1、t2、t3和t4,并对区间[0, t1]、[t1, t2]、[t2, t3]、[t3, t4]进行了等间隔整周期划分。
-
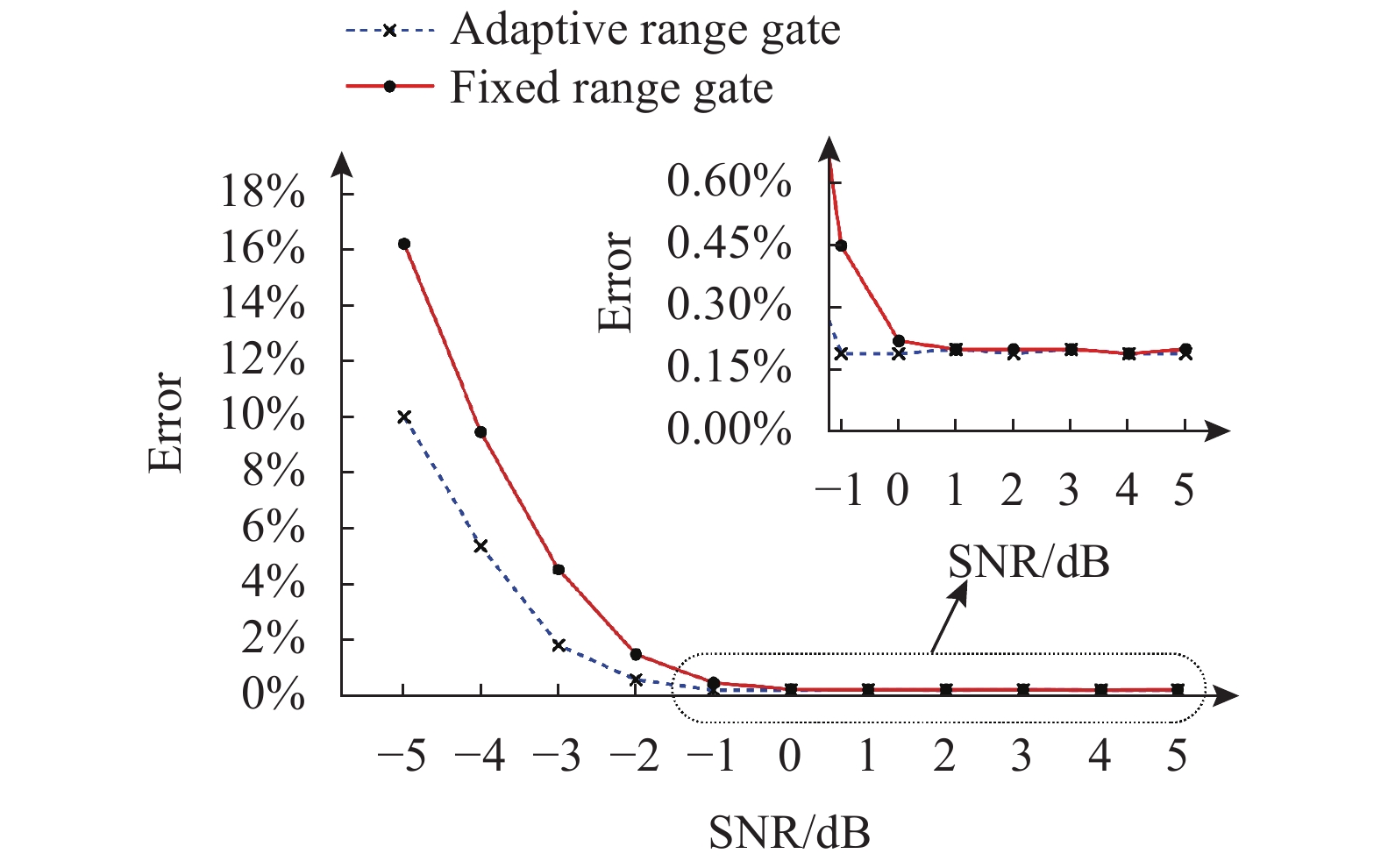
为验证自适应距离门方法能够在提高距离分辨率的同时满足测量误差要求,使用自适应距离门方法和固定距离门方法处理范围信号频率40~120 MHz,信噪比−5~5 dB的仿真信号,进行5000次独立计算,对比分析频率计算结果的误差(见图4)。

Figure 4. Curves of signal-to-noise ratio-average error
结果表明,仿真信号信噪比大于1 dB时,自适应距离门方法与固定距离门方法的频率估计结果误差基本一致,约为0.2%。当信噪比小于1 dB时,随着信噪比的降低,两种方法的频率估计误差均增大,自适应距离门方法频率估计误差更小;信噪比小于−1 dB时,自适应距离门方法的频率误差是固定距离门方法频率误差的38%~62%。
-
距离分辨率指相邻两个距离门中心的距离间隔,固定距离门方法的距离分辨率与距离门的长度相同;自适应距离门的距离门长度与信号频率相关,距离分辨率不固定。
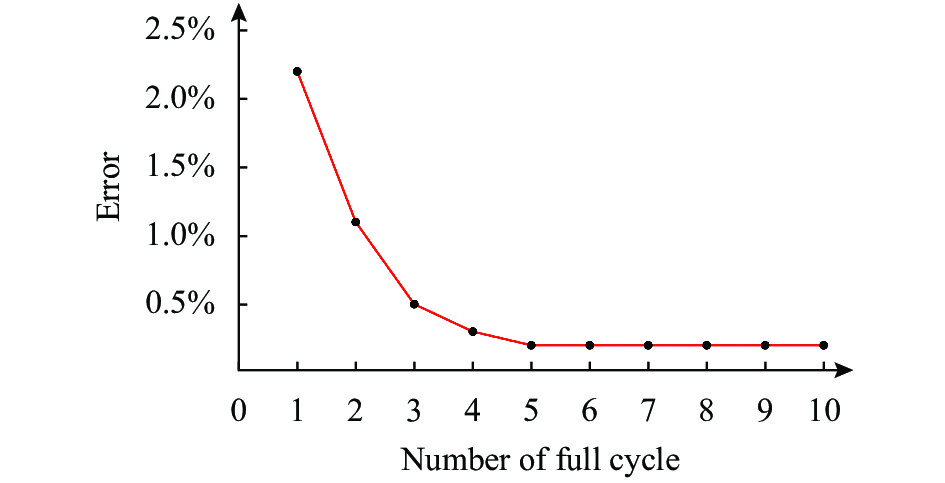
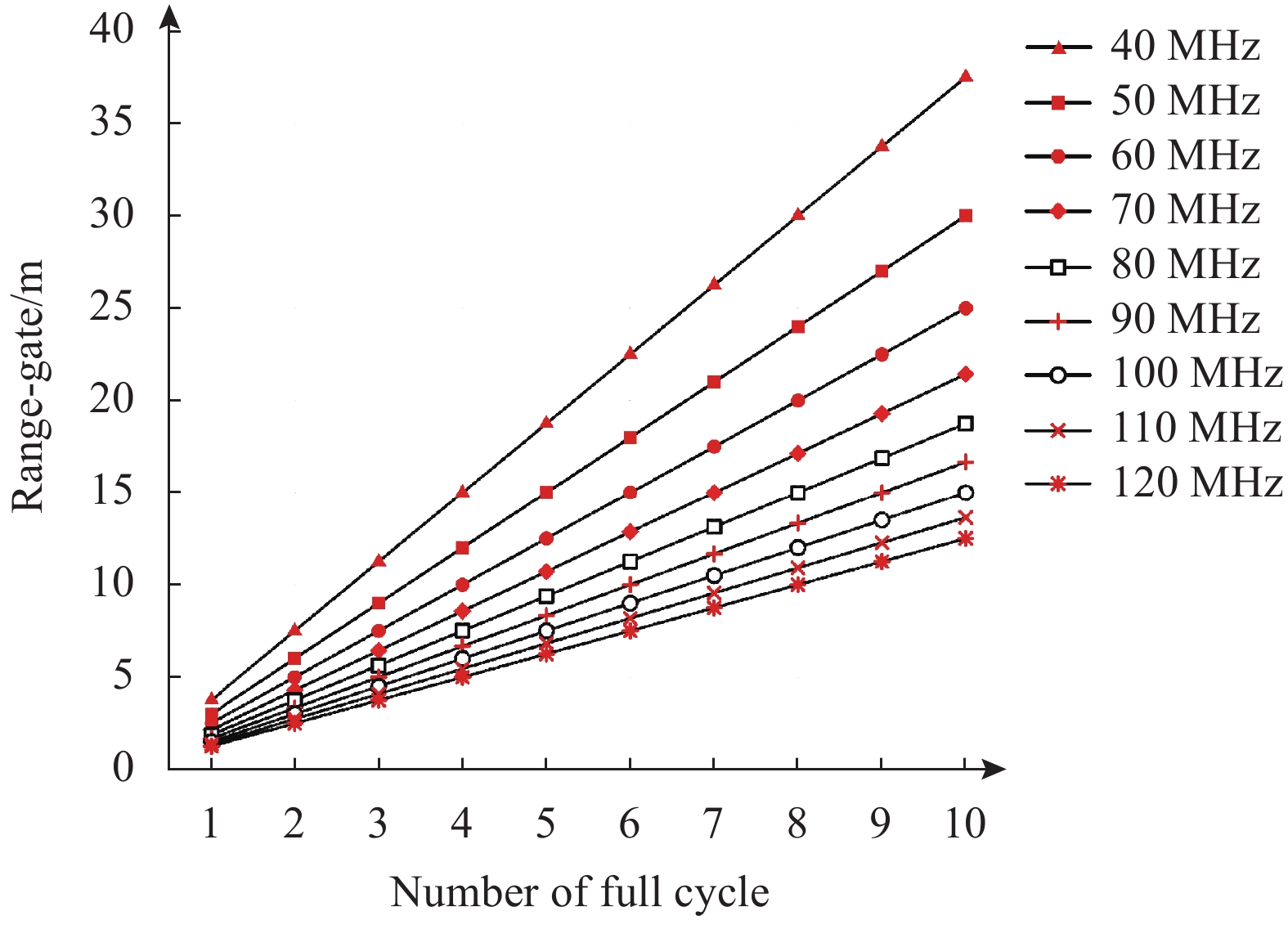
单个自适应距离门内包含的整周期数量对频率估计误差和距离分辨率均会产生影响。通过仿真分析整周期的数量与频率估计误差的关系(见图5)以及自适应距离门长度与整周期数量、信号频率之间的关系(见图6)。

Figure 5. Curve of number of full cycle-frequency error

Figure 6. Curves of number of full cycle-range-gate length-frequency
由仿真结果知,单个距离门内整周期数量取5以下时,频率估计误差开始明显增加,由0.5%以下增加到1%以上,最大增加到4.1%。整周期个数取5及以上时,频率估计误差基本保持不变,在0.2%左右。整周期数取5时,对应距离分辨率范围6.25~18.75 m。
在划分自适应距离门时,需要综合考虑距离分辨率和风速误差,选择合适的整周期数量,令距离分辨率和风速误差同时达到最优。
-
实验使用的激光测风雷达是西南技术物理研究所研制的1.55 μm全光纤相干脉冲激光测风雷达[15],参数见表1。其使用的算法是固定距离门方法,距离分辨率可设置为30、50、70、100 m。为评价自适应距离门方法在距离分辨率和风速测量精度方面的优势,验证仿真实验结果,使用自适应距离门方法处理激光测风雷达回传的原始数据,与激光测风雷达给出的结果进行对比。激光测风雷达、转盘放置于实验场地,相距约50 m,目标建筑物在约800 m处(见图7)。

Figure 7. Schematic diagram of measurement experiment
-
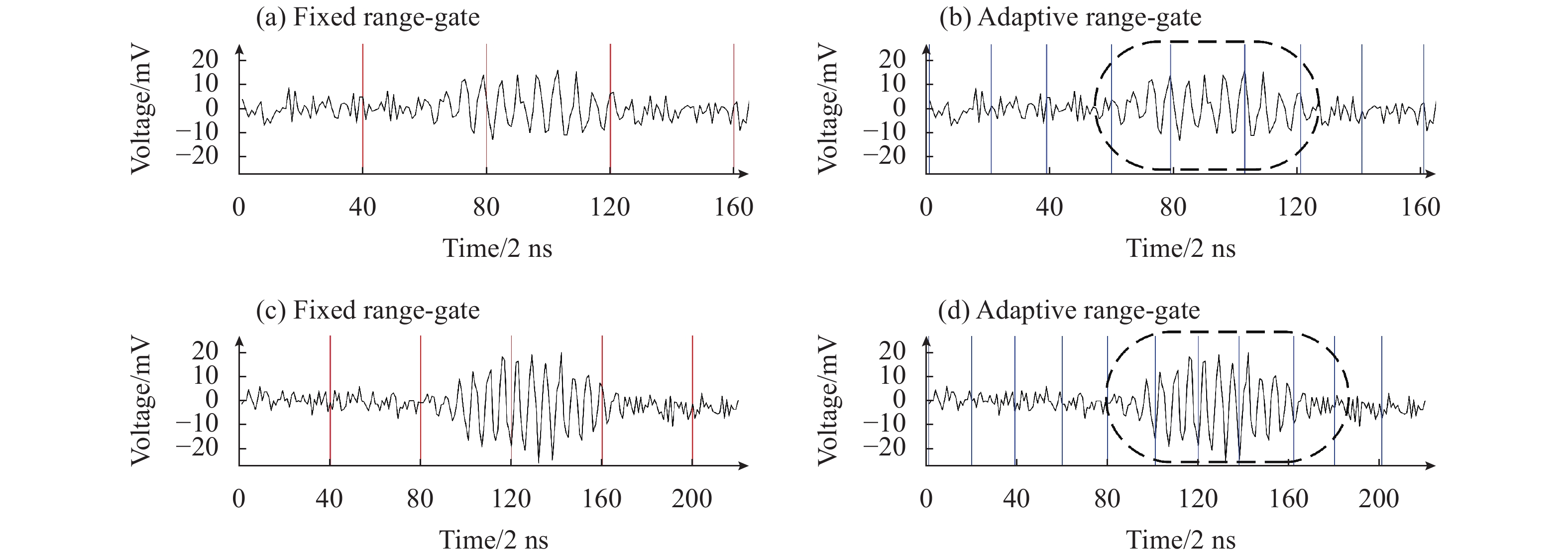
调整激光测风雷达焦距和天线方向,将激光焦点调整到转盘边缘处,激光光斑一部分由转盘边缘遮挡,另一部分照射到大气中,由约800 m处的建筑物反射。使用激光测风雷达获取回波信号中包含有转盘、大气风场、建筑物的信息。将激光雷达的距离门划分结果和风场回波原始数据回传到计算机。使用自适应距离门方法分别对转盘和建筑物的回波时域信号进行距离门划分,与激光雷达的处理结果进行对比(见图8)。距离门划分结果表明,自适应距离门方法能够准确提取出转盘回波信号和建筑物回波信号所在区间[图8(b),图8(d)],并进行了等间隔整周期的距离门划分。

Figure 8. Target echo signal range-gate division. (a) Fixed range-gate dividing the turntable echo signal; (b) Adaptive range-gate dividing the turntable echo signal; (c) Fixed range-gate dividing the building echo signal; (d) Adaptive range-gate dividing the building echo signal
-
调整激光测风雷达,令光斑全部照射到转盘上。设置转盘转速2.5~25 m/s,步进2.5 m/s,以转盘编码器输出的转速作为真值。激光测风雷达系统设置累加次数为2 000,以30~60 m距离处的读数作为转盘速度测量结果;自适应距离门方法同样设置累加次数2 000,转盘速度取50 m附近距离门的计算结果,给出两者测量误差(见图9)。

Figure 9. Measurement error of turntable speed
转盘转速测量结果表明,自适应距离门方法的速度测量的均方根误差为0.19 m/s,固定距离门方法的均方根误差为0.29 m/s,自适应距离门方法的速度测量误差优于固定距离门方法,提高了速度测量精度,与误差分析仿真实验中结论相符。
-
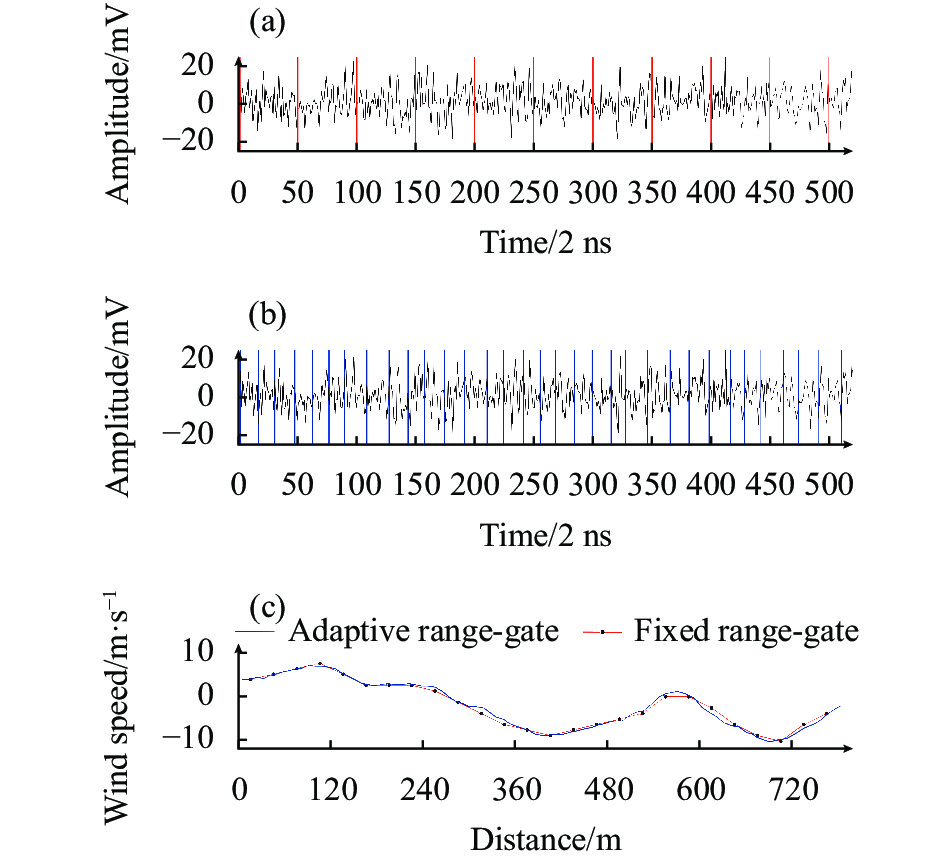
撤去转盘,调整激光测风雷达焦距,使用激光测风雷达获取雷达和建筑物间的大气风场回波数据。激光测风雷达距离分辨率设置为30 m,设置累加次数5000,将距离门划分结果、风场测量结果和风场原始数据回传到计算机。自适应距离门方法设置累加次数5000,使用自适应距离门方法处理风场原始数据。对比激光测风雷达和自适应距离门方法的距离门划分结果与风速测量结果(见图10)。

Figure 10. (a) Results of fixed range-gate division; (b) Results of adaptive range-gate division; (c) Comparison of wind speed measurement results
对比分析激光测风雷达和自适应距离门方法的风速测量结果,两者径向风速度测量曲线基本吻合,风速度在中频附近变化,自适应距离门方法的距离分辨率更高,在7~11 m之间变化,自适应距离门长度变化范围与2.3节中仿真结果相符合。
图10(a)与(b)的区别在于自适应距离门方法的距离门数量多于固定距离门方法,其距离分辨率提升的代价是增加了计算量。激光测风雷达数据处理系统计算能力和实时性要求限制了自适应距离门方法的测程,因此该方法较适合用于一定空间范围内风场的精细化测量,用于全测程内风场探测时其数据处理时间过长,实时性不高。
-
文中提出一种基于整周期搜索的自适应距离门划分方法,特点是划分的距离门实现了整周期截断,并与信号频率自适应。通过仿真和实验验证了自适应距离门方法划分出的距离门能够与信号频率自动适应。使用两种距离门划分方法处理仿真信号,仿真信号信噪比小于1 dB时,随着信噪比的降低,两种方法的频率估计误差均增大,自适应距离门方法频率估计误差更小;信噪比小于−1 dB时,自适应距离门方法的频率误差是固定距离门方法频率误差的38%~62%。
实验中使用自适应距离门方法处理激光测风雷达获取的转盘回波信号和大气风场回波信号,与使用固定距离门方法的激光测风雷达的测量结果进行了对比。结果表明:自适应距离门方法提高了激光测风雷达的频率估计精度和距离分辨率,能够反映更多的风场变化细节。与国内外的现有型号激光雷达相比,文中方法的风速测量精度相比之前有所提升,但尚有差距;在距离分辨率方面提升较高,在需要一定空间范围内的高距离分辨率风场观测的领域如飞机尾涡流探测、船载测风、风力发电、流体分析等有着良好的应用前景。
Research on high resolution range-gate adaptive technology of coherent wind lidar
doi: 10.3788/IRLA20210187
- Received Date: 2021-02-26
- Rev Recd Date: 2021-05-06
- Available Online: 2022-01-06
- Publish Date: 2021-12-31
-
Key words:
- wind lidar /
- full cycle search /
- adaptive range-gate /
- signal processing
Abstract: The signal processing of pulse coherent wind lidar usually uses fixed range-gate to divide the time domain signal, and perform frequency spectrum calculation for each range-gate to obtain wind speed information. The time domain signal division of the fixed range-gate has the problem of non-periodic truncation of the intermediate frequency signal, which leads to spectrum leakage during spectrum calculation, resulting in errors and reduced signal-to-noise ratio. An adaptive range-gate division method based on full cycle search was proposed. The length of the range-gate was adaptive to the frequency of the intermediate frequency signal, which could realize the full cycle division of the signal, avoide the problem of spectrum leakage and improve frequency estimation accuracy. The two processing methods were simulated and analyzed by adding noise signal. The results show that the adaptive range-gate method can realize the adaptation of the range-gate length and the intermediate frequency signal. When the signal-to-noise ratio was less than 1 dB, the intermediate frequency estimation error obtained by this method was 38%-62% of the fixed range-gate method. The adaptive range-gate division method was used to process the turntable and wind field echo signals obtained by the laser wind measurement radar system, and the results were compared with the wind lidar equipped with the fixed range-gate method. The results show that the root mean square error of the adaptive range-gate method for the speed measurement of the turntable is 0.19 m/s, and the range resolution of atmospheric wind speed measurement varies from 7 to 11 m, which is better than that of fixed range-gate method, and improves the range resolution and measurement accuracy of the wind lidar.






 DownLoad:
DownLoad: