






-
水下成像技术是水下探测的一项重要技术,在目标探测、海洋地理工程等诸多领域有着重要的应用。普通光源受限于水体环境的特点,作用距离有限且图像噪声很大,而蓝绿激光在水中具有高透过率,可直接探测水下目标,其中532 nm波长的激光是最常使用的水下探测激光[1-2]。
载波调制激光雷达在水下探测方面具有很大的优势,这是由于杂散使回波信号在多次散射之后会丢失高频部分,而目标回波可以保留高频部分,因此在频域有着显著的区别,配合滤波技术可以有效抑制后向散射。而条纹管激光雷达具有高精度三维成像的优点,因此,结合二者的优势,笔者所在团队以高频调制激光器为探测源、条纹相机为接收器设计了一套高分辨水下成像激光雷达系统。
载波调制激光雷达的研究最早源于20世纪90年代的美国Drexel大学的Mullen等人[3-4],他们以3 GHz的微波源作为副载波,采用锁模方法将其调制到激光载波上,并进行了水下目标探测,结果表明:相对于传统激光雷达,载波调制的激光雷达可使图像对比度改善17 dB以上。随后,Mullen等人又进行了多次实验和仿真,包括在大西洋进行了实地探测实验,得出了该技术对后向散射的抑制可达到20 dB以上的结论。2002年,Pellen等人进行了载波调制的激光雷达系统的水槽实验[5],对激光脉冲进行了1.5 GHz的载波调制,利用添加黏土粉末的方法改变水质,进一步验证了该方法具有显著的后向散射抑制作用。
常规的水下成像技术包括激光扫描水下成像、距离选通激光水下成像[6],前者通过激光器发出激光束,探测器接收激光束中心,通过二者的同步机械扫描成像;后者基于不同距离的物体反射回来的激光到达探测器的时间不同这一原理,通过控制接收器的快门选通来减少后向散射进入探测器,但是二者都无法提供完善的三维信息。条纹管水下激光三维成像技术的核心部分是条纹管探测器[7],它将接收的光信号在条纹管光电阴极上成像,再经过信号转换、偏转与增强得到初始图像,最后再经过传统的电荷耦合器件(Charge Coupled Device,CCD)技术采集,在信息处理机进行解调、去噪、图像反演、存储显示,从而生成高精度的三维图像[8]。
目前载波调制激光雷达研究大多采用高频微波调制激光脉冲的方案,核心是获得高频脉冲激光,笔者团队采用调Q技术和法布里-珀罗谐振腔(Fabry–Pérot cavity,F-P腔)对激光源实现高频调制设计激光器作为探测源,优点是可以获得更高能量的激光脉冲,提高探测性能,并搭建20 m水槽对样机的性能参数进行了实验,实验结果表明该原理样机具有良好的水下三维成像性能。
-
实验采用由国防科技大学、中国科学院西安光学精密机械研究所、西北工业大学、中国电子科技集团公司第二十七研究所和湖南力研光电科技有限公司联合研制的水下三维成像激光雷达原理样机,图1是其主要架构,主要由激光发射系统、光学接收系统和信号采集处理系统三部分组成。发射系统发射激光进入水体环境,由光学接收系统接收反射光,最后送入信号采集处理系统实现水下三维目标成像。

Figure 1. Composition of underwater 3D imaging extended range lidar
激光发射系统的核心是产生高频激光脉冲串,传统的载波调制水下激光雷达探测系统是以高频微波调制激光脉冲得到调制脉冲信号,难以得到高能量的脉冲信号。文中系统采用调Q技术结合F-P腔振荡输出,由激光信号本身直接得到高频脉冲信号。首先以调Q激光器作为激光源得到高峰值功率的单脉冲信号,然后利用F-P腔往返部分的输出特性得到连续脉冲串,最终达到产生高频激光脉冲的目的,并且脉冲信号拥有较高的能量,能够探测较远距离的目标。
光学接收系统主要部件是条纹相机,它是一种具有高时间、空间和光强分辨力的超快诊断仪器,主要组成部件有条纹变像管、像增强器、高低压供电电源、扫描电控系统、前端输入狭缝光学系统、工控模块、后端光锥耦合CCD记录系统等。回波信号通过狭缝后由光电阴极转换为电子像,随后时间序列上不同位置的电子经过扫描电场,被扫向与条纹方向垂直的空间位置,完成时间信息到空间信息的转换,将狭缝提取的一维图像变为二维图像,再经过倍增轰击荧光屏,完成电信号到光信号的转换,最后由CCD记录。其中核心部分是条纹变像管,其像元数越多,成像精度越高。同时,其可见光波段光谱灵敏度越高,信噪比越高,探测能力越强。
信号采集处理系统的核心是滤波处理,分为三部分:第一部分是针对条纹相机自身背景噪声的预处理,通过三种方法对比得到均值滤波+邻域平均法滤波有更好的效果;第二部分是针对回波信号,利用带通滤波滤除低频噪声,同时利用匹配滤波进一步增加信噪比;第三部分是通过分析强度图得出剩余噪声基本集中于低强度段,利用阈值滤波对回波信号做最后的处理。
-
海水的后向散射主要存在于低频区域,使用载波调制方法抑制后向散射时,调制频率需要远大于后向散射信号的截止频率,一般选取108~1010 Hz的频率区间。对于载波调制激光雷达系统,杂波由于多次散射后对发射脉冲在时域内有展宽效应,在频域内导致高频信息丢失。而直接返回的目标回波则会完全保留高频部分,因此后向散射和目标回波在频域特性上有着显著的不同,配合相应的滤波处理就可以有效地抑制后向散射。
高频调制激光器由西北工业大学研制,采用“振荡器+放大器”(Master Oscillator Power-Amplifier,MOPA)结构,种子激光器为半导体泵浦的短腔亚纳秒脉冲激光器,波长1 064 nm,输出脉冲能量300 μJ,脉冲宽度770 ps,重复频率1~100 Hz可调,针对实际需求,重复频率设置在10 Hz。放大器采用半导体侧泵模块双通两级放大结构,经过两级放大之后能量达到170 mJ,并且脉冲宽度没有发生明显改变。 1 064 nm基频光经过KTP倍频晶体获得532 nm的绿光输出,脉冲能量可达80 mJ。磷酸钛氧钾(KTiOPO4,KTP)晶体置于F-P腔内,应用F-P腔往返部分输出特性,获得脉冲间隔约为2.1 ns,即载波频率约为478.5 MHz的532 nm激光脉冲,图2为示波器采集的激光器输出波形。实际实验中采用的激光器关键参数如表1所示。
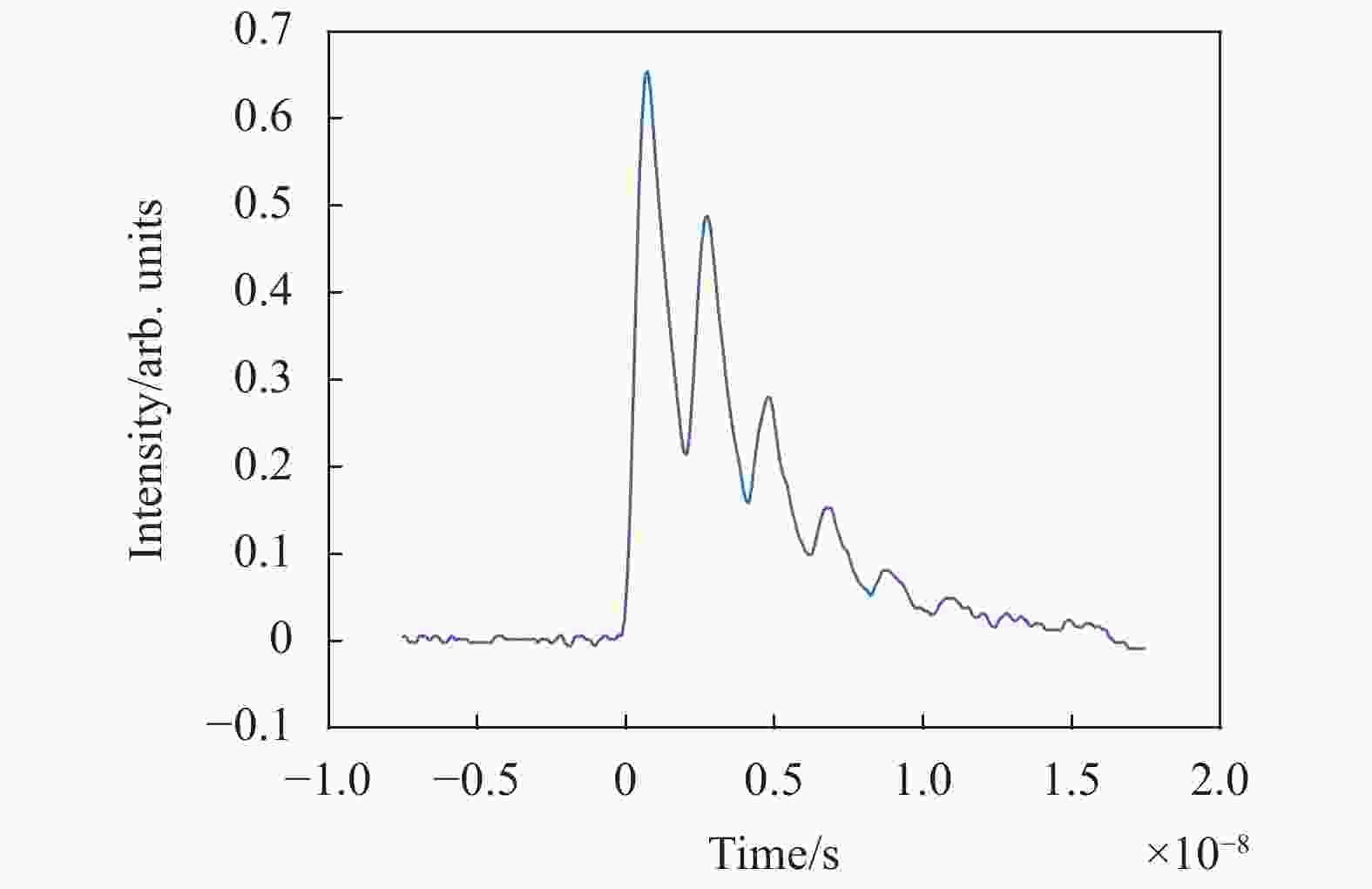
Figure 2. Waveform of laser output
Parameters Value Laser wavelength/nm 532 Laser pulse energy/mJ 3.94 Laser pulse width/ns 12 Pulse frequency/MHz 478.5 Table 1. Key parameters of underwater 3D imaging lidar
-
文中系统采用由中国科学院西安光学精密机械研究所研制的条纹相机。条纹相机系统由输入输出光学系统、条纹变像管模块、像增强器、扫描电控模块、工控模块、图像采集及分析系统等组成。
输入输出光学系统由狭缝、输入镜头、输出镜头组成,其中狭缝为长度为35 mm、宽度0~3 mm的可调狭缝,调节精度为0.005 mm。
条纹变像管是条纹相机实现时空变换测量的核心模块,要求可见光波段光谱灵敏度要高于50 mA/W,像元数大于500个。为满足像元数大于500的要求,采用球面输入和输出窗电子光学设计减小条纹管边缘像差,实测静态空间分辨率大于20 lp/mm、动态空间分辨率大于8 lp/mm,在35 mm长的狭缝内像元总数达到560个。另一方面,严格控制了光电阴极的制备工艺,通过厚度调控实现了在550 nm波长处条纹管的灵敏度达到55 mA/W。
像增强器用于放大条纹管的输出图像信号,倍增效率为102~104倍。为获得高增益信号,选用S25阴极类型的像增强器,其阴极灵敏度高于150 µA/lm,增益在102~104范围内可调,满足不同强度输入信号的放大要求。
扫描电路主要用来产生高压线性时变信号,对通过偏转板的光电子实现时空变换,另一方面也具有一定的延时功能,以实现扫描电压和输入被测信号的良好同步。为获得不同精度和不同距离的目标成像,设定了三个扫描档位,分别为5 ns、30 ns和100 ns。
此外,还需要对条纹相机输出的条纹像进行预处理,主要达到两个目的:(1)采用滤波方法去除部分噪声;(2)对狭缝方向的多个像素进行合并,以与条纹相机空间分辨率相匹配,该过程也能增加信噪比。
-
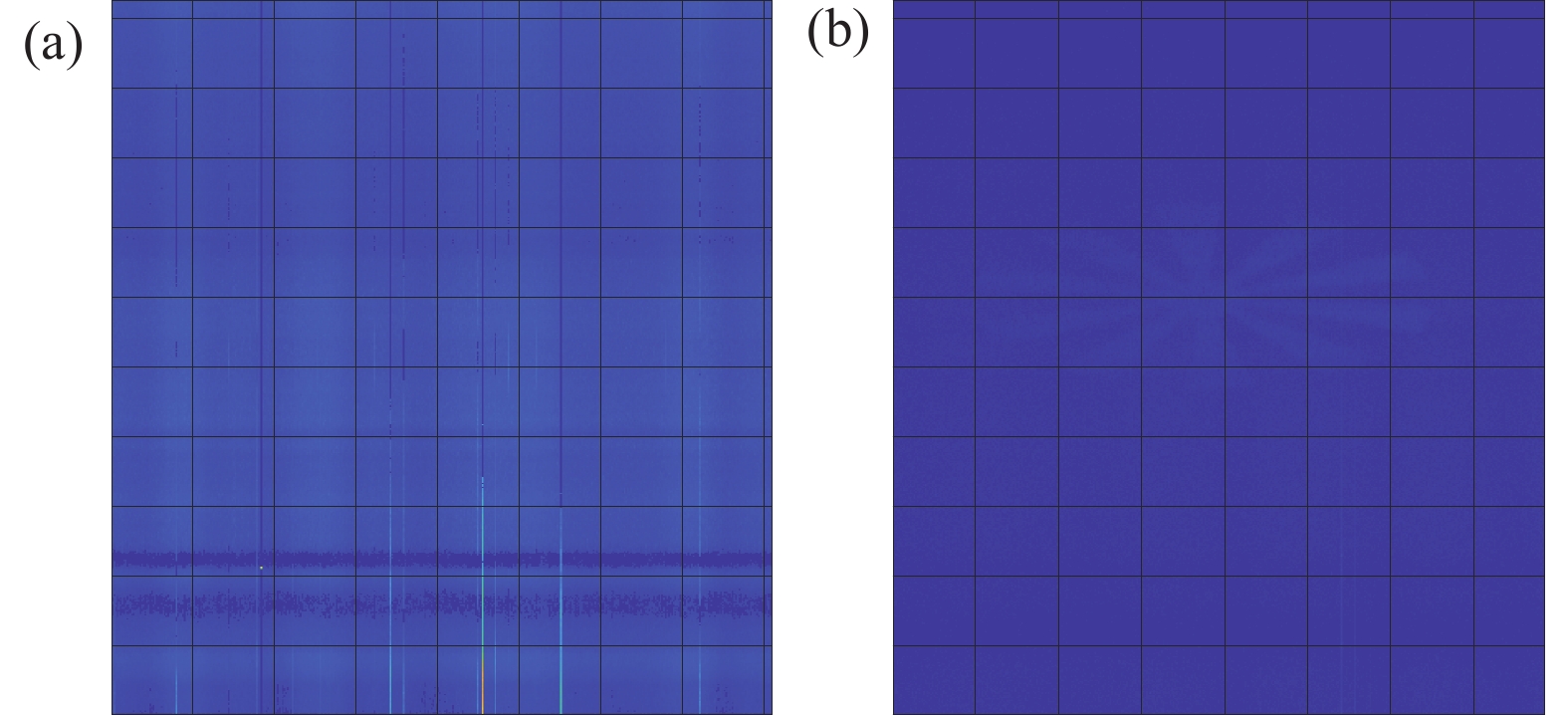
由于条纹相机背景噪声较大,需要先将采集到的每帧图像做去噪预处理,方法是先对每帧图像进行均值滤波,随后采用K近邻平滑滤波器或者邻域均值法滤波。图3分别是均值滤波、均值滤波+K近邻平滑滤波和均值滤波+邻域平均法滤波后的结果。从图中可以看出,均值滤波+邻域平均法滤波效果更好,这是因为噪声分布比较稀疏,目标信号分布比较集中,邻域平均法能够有效抑制噪声,提高信噪比。

Figure 3. Results of three filtering methods. (a) Mean filtering; (b) Mean filtering+ K-nearest neighbor smoothing filtering; (c) Mean filtering+ neighborhood average filtering
信号采集处理系统主要对接收的信号进行带通滤波和匹配滤波处理[9-12]。带通滤波的作用是去除调制的直流分量,并滤除介质散射的低频信号。直流分量的去除效果影响到匹配滤波基底旁瓣的大小,非载波频带范围分量的噪声则会降低信噪比。带通滤波器中心频率为载波中心频率
${f_m}$ ,通带宽度${B_r}$ 略大于载波信号带宽${B_{sc}}$ ,文中设置为${B_r} > 1.25{B_{sc}}$ ,而过渡带越窄越好。记带通滤波后的信号为${x_{bpf}}\left( i \right)$ 。匹配滤波器广泛应用于通信、雷达、声呐中,可以提高雷达的距离分辨率。记载波调制数字实信号为
${x_m}\left( i \right)$ ,则匹配滤波过程可以表达为:式中:
$ conv $ 表示卷积运算。文中将在第2节中通过水槽实验分别从成像距离、信号处理增程、相对距离分辨率和成像精度等四个方面验证该原理样机的性能。
-
该原理样机在中国电子科技集团公司第二十七研究所进行了实验,以验证其性能。搭建一个20 m×1 m×1 m玻璃水槽,构建水下三维成像激光雷达样机实验系统。实验分为两大部分:清水环境实验和浊水环境实验,两种实验分别选取具有一定代表性的环境,清水采用市政自来水,衰减系数为0.11 m−1,浊水环境则是往清水中注入了腻子粉和牛奶,衰减系数为0.56 m−1,具体衰减系数计算方法如下:
式中:
$ {x}_{1} $ 、${x_2}$ 分别为水槽中目标物的不同位置,${x_2} > {x_1}$ ;${\varphi _1}$ 、${\varphi _2}$ 分别为对应的回波强度;$\varepsilon $ 为求得的水体衰减系数。 -
将一个直径30 cm的分辨率靶标(如图4所示)放置在清水环境下的水槽末端,使用原理样机对其多次扫描成像,结果如图5所示,3D像存在大量噪声,而强度像中目标较为清晰,说明噪声强度集中于低强度段。对每帧图像进行直方统计,以信号强度的最大值和最小值分别作为强度区间的上下限,将信号强度平均分为低强度、中强度、高强度三段,结果如图6(a)所示,可以看出噪声基本都集中于低强度段,因此可以采取阈值滤波,阈值α设定如下:

Figure 4. Resolution target

Figure 5. Imaging results at 20 meters in clear water environment. (a) 3D image; (b) Intensity image
式中:
$I$ 表示信号强度。
Figure 6. Statistical result and imaging result at 20 meters in clear water environment. (a) Statistical result; (b) 3D image
加入阈值滤波的成像结果如图6(b)所示,可以看出信噪比有明显的提升。因此可以认为在清水环境下该原理样机拥有优于20 m的探测能力,超过了美军与诺·格公司合作研制的机载激光水雷探测系统(ALMDS)所公布的测试水深(40英尺,约12.2 m)[13]。
-
首先使用蒙特卡罗方法仿真不同距离和不同衰减系数下的增益,模拟光子数为1亿,仿真过程中仅改变衰减系数。
仿真步骤如下:
(1)通过蒙特卡罗模型仿真后向散射冲激响应;
(2)再对冲激响应求取功率谱,归一化取对数,选取3 dB截止频率点,可以得到截止频率;
(3)设计相应截止频率的带通滤波器,对仿真信号进行匹配滤波和带通滤波处理。
通过仿真可以得到不同衰减系数的增益如图7所示,可以看出增益的整体趋势是随着衰减系数的增加而降低的,增程效果和相对距离测量精度也随着衰减系数的增加而降低。

Figure 7. Gain of different attenuation coefficients
为验证所研制系统的带通滤波处理增程的效果,在浊水环境中设置两组对比实验,一组未使用带通滤波处理,一组使用带通滤波处理,成像结果如图8所示。可以看出未使用带通滤波处理的标靶成像在5.9 m处被噪声淹没,而使用带通滤波处理的靶标成像在10.7 m处依然可以探测到目标,增程81.4%。

Figure 8. Intensity profiles at 5.9 m and 10.7 m in turbid water. (a) Intensity image without band-pass filter (5.9 m); (b) Intensity image with band-pass filter (10.7 m)
-
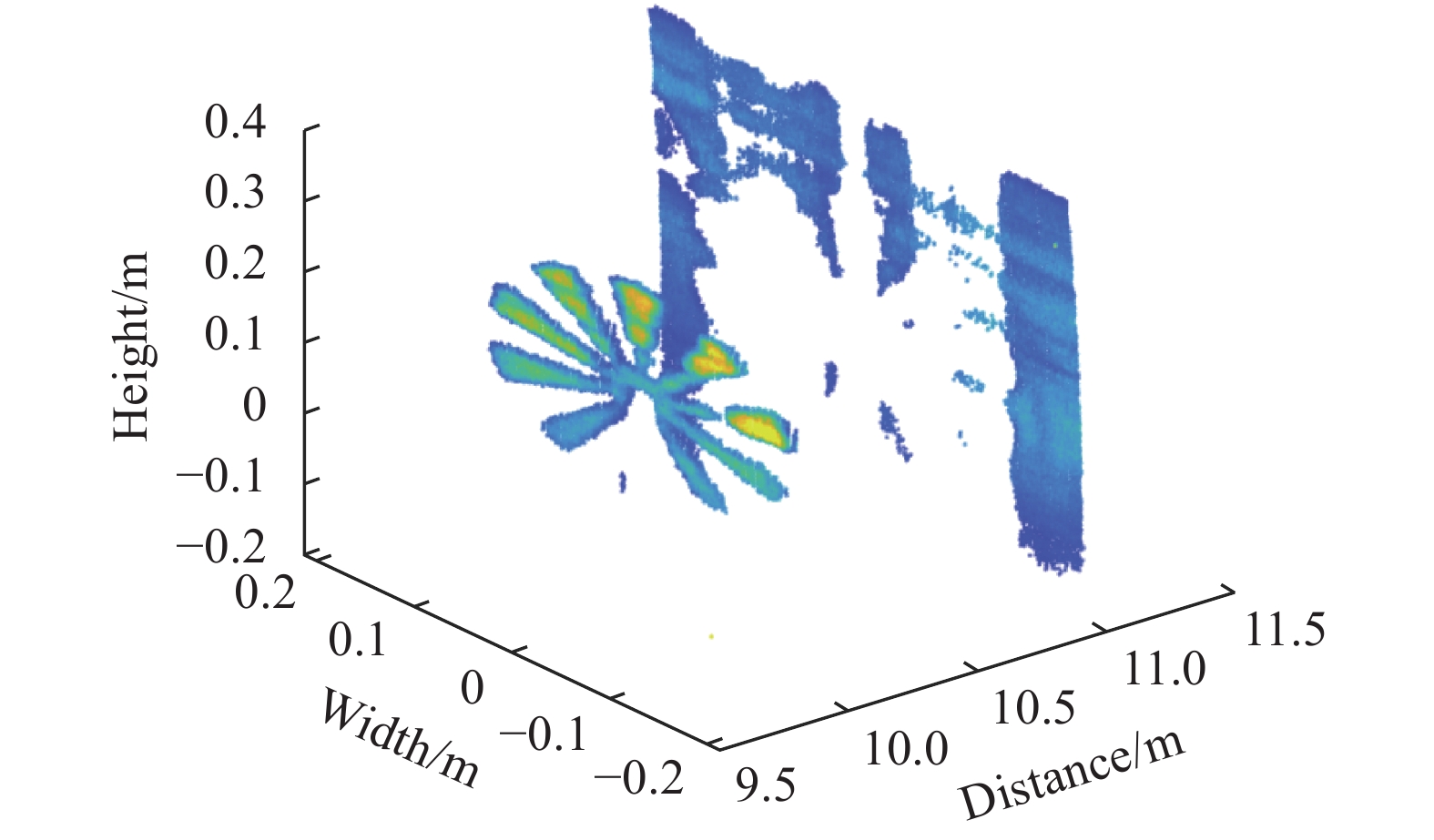
将靶标放置在水槽10 m处(浊水环境),在靶标后方(10.83 m处)放置一金属板,即二者的实际测量前后距离为0.83 m,随后对二者进行扫描成像,结果如图9所示。分别对两个平面的3D图像进行拟合,得到对应拟合的平面,拟合平面可以表示为
$ax + by + $ $ cz + E = 0$ 。靶标和金属板整体较为平整,且二者平行放置,那么得到的两个平面的拟合系数$a$ 、$b$ 、$c$ 是一致的,实际拟合结果也显示两个平面的拟合系数$a$ 、$b$ 、$c$ 差别很小,可以忽略不计。因此取其中一个平面的系数$a$ 、$b$ 、$c$ ,按照公式(4)计算二者的距离,得到结果为0.82 m,误差为0.01 m,从而得到相对距离误差为1.20%。
Figure 9. Imaging result of target and iron plate
-
成像精度实验是验证该原理样机对目标物细节的捕捉能力[14],也是成像雷达的一个核心指标。图4靶标中心有一个直径9 mm的螺丝,在清水环境中,20 m处靶标边缘清晰可见,但是观察不到螺丝。图10是清水环境13 m处的成像结果,可以看出两种图像中螺丝都清晰可见,证明该原理样机有着较强的成像精度。
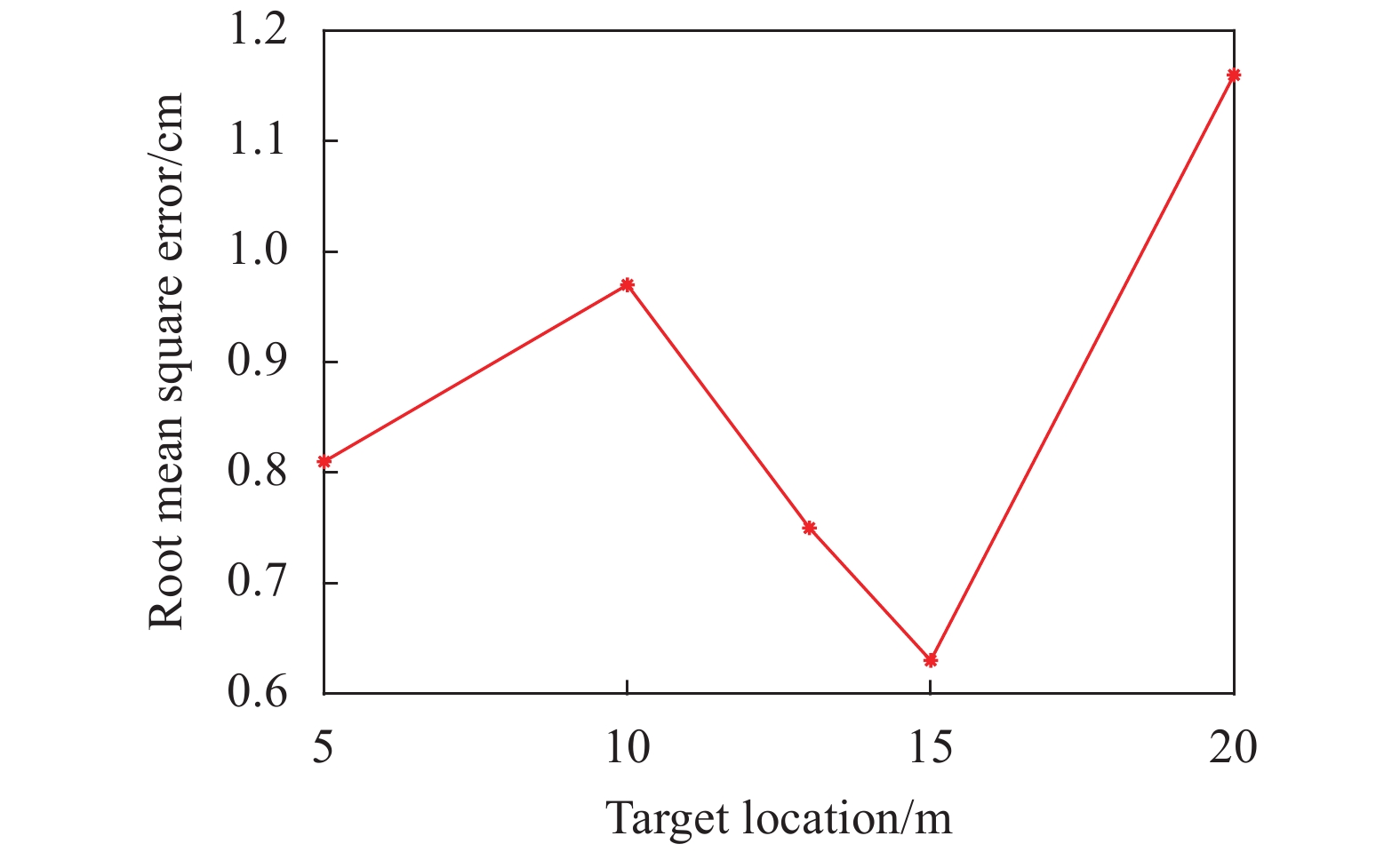
此外,文中对比了靶标成像直径与实际直径的误差,即随机取成像结果的5组直径,与实际直径求均方根误差,公式如下:
式中:
$\Delta {d_i}$ 为成像结果直径与实际直径的误差;$S$ 为最终求得的均方根误差。图11为不同位置的靶标成像的均方根误差,从图中可以看出该原理样机成像均方根误差较小,拥有较高的成像精度。
Figure 10. Imaging results at 13 m in clear water environment. (a) 3D image; (b) Intensity image

Figure 11. Imaging accuracy of target in clear water
-
条纹管激光雷达具有系统集成度高、距离分辨能力强、图像分辨率高等优点,与激光强度调制相结合是实现水下增程成像的理想选择。团队使用调Q技术结合F-P腔振荡输出得到具有高峰值功率、高能量的高频激光脉冲,拥有较强的探测能力。结合条纹管激光雷达和载波调制激光雷达的优点,设计研制了一套水下三维成像增程激光雷达原理样机,并进行了水下实验。实验结果表明:该原理样机实际成像探测距离优于20 m (清水环境),能够捕捉到清水环境13 m处的直径9 mm目标细节,最大成像均方根误差(清水20 m处)小于1.2 cm,同时在浊水中的相对距离分辨误差为0.01 m,拥有较高的距离分辨率和成像精度。
团队将进一步开展针对各种条件下探测成像的研究,探索各个因素对于探测距离和成像精度的影响,同时实现设备小型化,投放到真实海域中进行实地探测。
Underwater imaging system of pulse modulated lidar
doi: 10.3788/IRLA20210204
- Received Date: 2021-03-29
- Rev Recd Date: 2021-05-20
- Publish Date: 2022-04-07
Fund Project:
Equipment Pre-research Project;Research Project of National University of Defense Technology(ZK20-39)
-
Key words:
- high resolution /
- underwater imaging /
- lidar /
- range-extended
Abstract: According to the application of underwater target detection, the corresponding 532 nm wavelength lidar system parameters were given. Combining the advantages of streak tube lidar and subcarrier modulated lidar, a prototype of underwater 3D imaging extended range lidar was designed. Compared with the common scheme of microwave modulated laser to generate high frequency pulse, the prototype adopted Q-switch technology to compress laser pulse, and then combined the characteristics of F-P cavity to generate high frequency laser pulse, which had the advantages of high peak power and high output energy. The experimental results show that the imaging distance of the prototype in clear water environment is better than 20 m, and it can capture the target details with a diameter of 9 mm at 13 m. In the turbid water environment, the range-extended capability of signal processing is 81.4%, and the range resolution error is 0.01 m. The experimental results provide a foundation for further improving the imaging range and resolution of underwater lidar and developing underwater imaging equipment.



































 DownLoad:
DownLoad: