





HTML
-
GEO轨道是非常珍贵的轨道资源,运行着大量高价值遥感与通信卫星。部分GEO卫星因为寿命到期、太阳翼展开失败、控制系统损坏等原因无法继续正常工作,需要开展在轨救援、加注、辅助展开或者拖至坟墓轨道等操作。在实施这些操作前,需要对目标进行捕获、跟踪、接近停靠、交会对接等一系列探测任务,确保服务卫星在轨安全。
激光测距雷达主要用于近程导引阶段(1~20 km),用于对目标进行测距,保证相对距离安全,防止发生碰撞。使用过程如图1所示[1]。在这个阶段中采用激光雷达对目标相对距离进行测量。空间测距主要使用低频脉冲激光,通过发射高功率脉冲实现飞行时间测量,从而反演出相对距离[2]。

Figure 1. Composition of lidar system
伪随机码激光测距系统通过高速电光晶体对激光进行调制,调制后再进行放大输出,通过全光纤设计,有利于实现系统的紧凑化轻小化设计。接收端使用单光子探测器进行探测,探测器技术成熟度高,逐渐成为了激光测距计数的研究热点。参考文献[3]仿真了使用计数率1 GHz的光电探测器进行探测,理论仿真测距精度优于5 cm。但由于使用多通道探测技术,其能量利用率较低,且受到单脉冲能量限制,测量距离受限,比较适用于大目标。参考文献[4]提出使用离散放大光电探测器,即输入的光电子自动分散到N个放大通道中进行放大,这种探测方式可以实现100 MHz的探测速率要求,但是由于探测过程中统计方法没有优化,测距精度为12.7 cm。参考文献[5]提出用于日光下使用的伪随机码激光雷达,并实现了对反射率为0.1的目标实现了1 km的测距,测距精度小于1 m。参考文献[6]中,赫里奥瓦特大学使用PicoHarp300时间计数模块,25 MHz的激光脉冲,利用比特流匹配的方法解决了低阶码远距离的距离模糊问题。虽然测距精度达到了25 mm@4.4 km,但是其测量累计时间过长,难以实现对运动目标的探测。
在轨卫星在交会过程中属于动态特性较为复杂的弱小目标,需要探测频率、探测准确度、测距精度高的激光测量系统,文中采用较低的伪随机调制频率100 MHz,可以实现大范围高精度(0.1 m)的距离探测,且测距结果输出频率优于10 Hz,能够满足运动目标的高精度测距需求。
-
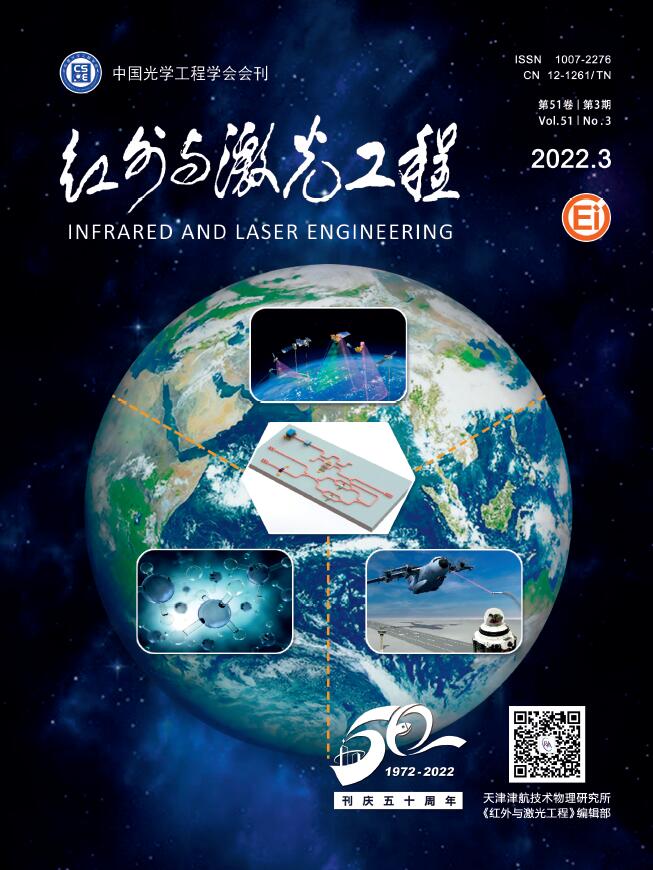
文中研制的激光雷达系统组成如图1所示。包括激光器、伪随机码生成器、光电调制器、整形发射光学分系统、接收光学分系统、盖革APD、时刻鉴别器和上位机等。
发射阶段:单光子激光雷达使用窄线宽、高峰值功率的激光器作为信号源,激光调制器根据伪随机码序列对激光器输出激光产生强度调制,脉冲宽度即伪随机码周期[7],调制激光由掺铒光纤放大器(EDFA)进行脉冲信号放大。最后使用光束整形光学分系统将激光发射出去。实验中使用衰减器控制出光功率。
探测阶段:激光经过目标反射,通过接收光学分系统回到激光雷达,经透镜耦合入单模光纤中,由单光子探测器将光信号转化为电脉冲信号后输出,再由光子计数器中脉冲幅度甄别电路,对脉冲信号进行判决。将甄别后的码元序列与原始伪随机码序列进行相关运算,由相关峰值位置确定的目标距离导致的延时量,通过计算求得目标距离。时序控制器用于控制伪随机码调制序列的周期,以及光子计数器对回波信号进行计数,激光雷达主要设计指标如表1所示。
No. Parameter Value 1 Ranging range/km 20 2 Ranging accuracy/m 0.1 3 Data update rate/Hz 10 4 Target size 2 m×2 m×2 m 5 Target reflectivity 0.3 6 Wavelength/nm 1 550 7 Weight/kg 10 8 Volume/L 30 Table 1. Main specifications of ranging lidar
-
笔者课题组使用1 550 nm的DFB激光器,光谱宽度5 nm,发射平均功率80 mW。激光经过ixBlue公司的MX-LN-10强度调制器后,输出伪随机码信号。该调制器的最大调制速率达1 GHz,消光比最高30 dB。伪随机码信号由FPGA产生,调制频率为100 MHz,码长为14阶。调制器工作在quad+点,激光经过调制器后输出与调制信号正向的激光脉冲。强度调制器工作在quad+点,输出信号的消光比约26 dB,使用偏压控制电路实时跟踪quad的位置,并调整供电电压。工作点控制精度约0.2 V。
-
激光经过EDFA放大为平均功率约20 W的激光后,激光功率可调,NA为0.09,模场直径25 μm,由焦距250 mm、通光孔径45 mm的准直扩束镜发出,发散角约0.1 mrad。在20 km远的位置,激光直径为2 m。
由于接收端通光孔径较大,为了减小光学系统的体积和质量,使用收发分置的光学设计方式[8-9]。接收端光学系统焦距为354 mm。激光回波通过接收光学系统耦合到单模光纤中,然后入射到APD光敏面上。
发射和接收光学系统全部采用三片式设计,在激光发射和接收端使用五维调整架调整光轴方向。发射光学系统采用逆向设计,视场内各像点85%的能量集中在25 μm的范围内,系统像质可以保证出射光束的高斯分布传递。
接收光学系统为透射式,其视场内各像点85%的能量集中在13 μm的范围内,50%的能量集中在8 μm范围内。由于盖革APD的光敏面较小,使用单模光纤进行耦合,并且考虑到加工装调误差,可以保证系统50%的耦合效率。
-
APD选择北京敏光科技有限公司生产的型号为LSISPAD-C-SMFA的InGaAs探测器。此款探测器在盖革模式下探测速率可达200 MHz以上,后脉冲概率0.73% (1 μs),探测概率优于18%,暗计数率低于7×10−6。APD周围电路主要包括升压和正弦淬灭电路,淬灭正弦信号周期为100 MHz。
-
信号经过放大后由IO口进入FPGA,并在FPGA中进行累加和相关计算,最后输出结果经过串口传入上位机中进行显示。
FPGA的主要作用包括(1)产生伪随机信号输出并储存;(2)计算接收信号相关检测的移位结果;(4)统计计算测距结果,并输出高精度数据。相关检测输出的数据是以脉冲宽度整数倍的结果,文中使用的脉冲宽度为10 ns,其能够探测的最小距离为1.5 m。为了进一步提高系统测距精度,需要使用统计算法进行计算。
探测到的电信号脉冲半宽度约2 ns。由于探测概率为泊松分布,在探测过程中,单次回波信号将会在置信区间内波动。当回波个数足够多时,回波信号可以认为是高斯分布。因此,在输出计算结果时,将结果进行高斯拟合,可获得高精度统计测距结果。
-
制冷器使用紫铜加风扇的制冷形式,使用四级TEC制冷器进行制冷,通过热敏电阻对制冷温度进行反馈,制冷控制电路采用PID控制,温度控制精度优于0.1 ℃,加敷保温材料并隔绝空气。实验室环境下,最低制冷温度可达−42 ℃。
1.1. 激光器
1.2. 收发光学系统
1.3. 探测器
1.4. 信号采集与处理
1.5. 制冷控制
-
对于空间目标测距系统,系统性能评价的主要指标包括测距精度、分辨率、测量范围和信噪比。其中测距分辨率由系统的调制频率决定。对于伪随机码调制的激光测距系统,其激光光源通常采用连续半导体激光器,通过电光调制器将连续激光调制为伪随机编码的脉冲激光。测距精度与激光发射的峰值功率、接收光学天线的口径以及探测器灵敏度等因素有关,是激光雷达参数设计时需要重点关注的指标。因此,可以将以上相关因素反映到信噪比中。
(1)测距分辨率
伪随机码调制激光测距系统的距离分辨率由码速率f(即脉冲宽度)决定,码速率f与距离分辨率Δd的关系如下:
式中:c为光速;Δt为码元宽度。
(2)探测距离
以某型号卫星尺寸为例,卫星本体立方体边长约2 m,帆板展开约10 m×2 m,最大尺寸约22 m×2 m。由于帆板对1 550 nm激光反射率较低,通常只有5%,且基本为镜面反射,因此在计算中仅考虑由卫星本体产生的回波信号。
当目标相对距离为20 km时,光斑发散角0.1 mrad,则激光雷达方程为:
式中:PT为激光发射峰值功率;Pr为探测器接收到的光功率;ηatm为大气通过率;ηa为光学系统通过率;Se为入瞳面积;S为目标反射面积;R为探测距离;ρ为目标反射率。
(3)信噪比
伪随机码测量信噪比SNR与测量的次数有关,可以表示为:
式中:n为测量次数;hv为单光子能量。
(4)测距精度
测距精度可以表示为[10]:
可知,测距系统距离分辨率和信噪比越高,距离精度越高。
当测距数据更新率为10 Hz时,每个探测周期应不大于0.1 s。文中使用XC7A200T-2FBG676C FPGA开发板进行嵌入式程序开发。为了实现10 Hz探测速率,结合FPGA上逻辑计算单元数量(215360个),采用累加同或计算简化后,m码序列最长为14阶。
根据公式(3)、(4),测距精度为1 m、信噪比为5时,系统调制频率为:
同理,测距精度为0.1 m、信噪比为10时,系统调制频率为500 MHz。提高系统调制频率可以提高系统探测精度。然而,脉冲频率提高将导致伪随机码长度增加,或者使用精确门控方法增加探测距离。增加码长将导致信号输出频率下降,增加门控将导致系统复杂的提升。同时高频率淬灭电路复杂度高,不利于系统高可靠性设计。
由于盖革模式APD的被动淬灭时间约十几 ns,显然不适用于文中系统[9-12]。在相同偏置电压条件下,APD接收相同数量光子后光电流大小基本相同。因此,主动淬灭时光电流脉冲宽度基本相同。经测量,文中盖革APD光电流宽度约5 ns,且上升沿时间基本相同,约2 ns。因此,当合理设置光电流阈值,可以获得较精确的回波脉冲时间。文中使用的FPGA开发板时钟分频最高为800 MHz。为保证高频率主动淬灭电路正弦信号波形质量,伪随机码调制频率及正弦淬灭频率为100 MHz。后续在上位机对接收信号进行处理,也可以提高探测精度。
通过移位相关计算,相关结果为一个序列信号
$\delta \left( 1 \right)$ ,$\delta \left( 2 \right)$ ,···,$\delta \left( k \right)$ ,···,$\delta \left( {{2^{{N}}}{\rm{ - }}1} \right)$ ,其中k表示相关计算移位间隔数量。最高值对应的移位间隔即为测量值。但是由于激光信号在探测器中存在时间抖动,抖动造成同或计算相关峰展宽,且服从高斯分布。均值即为峰值位置。通过最小二乘法计算可以有效提高探测距离精度。
第n次相关计算结果为
${\delta _n}\left( 1 \right)$ ,${\delta _n}\left( 2 \right)$ ,···,${\delta _n}\left( k \right)$ ,···,${\delta _n}\left( {{2^{{N}}}{\rm{ - }}1} \right)$ 时,前次相关结果之和为:此时,累加结果依然服从高斯分布。文中使用相邻20次累加结果,计算分布结果中的均值位置。数据处理流程如图2所示。

Figure 2. Data processing flow
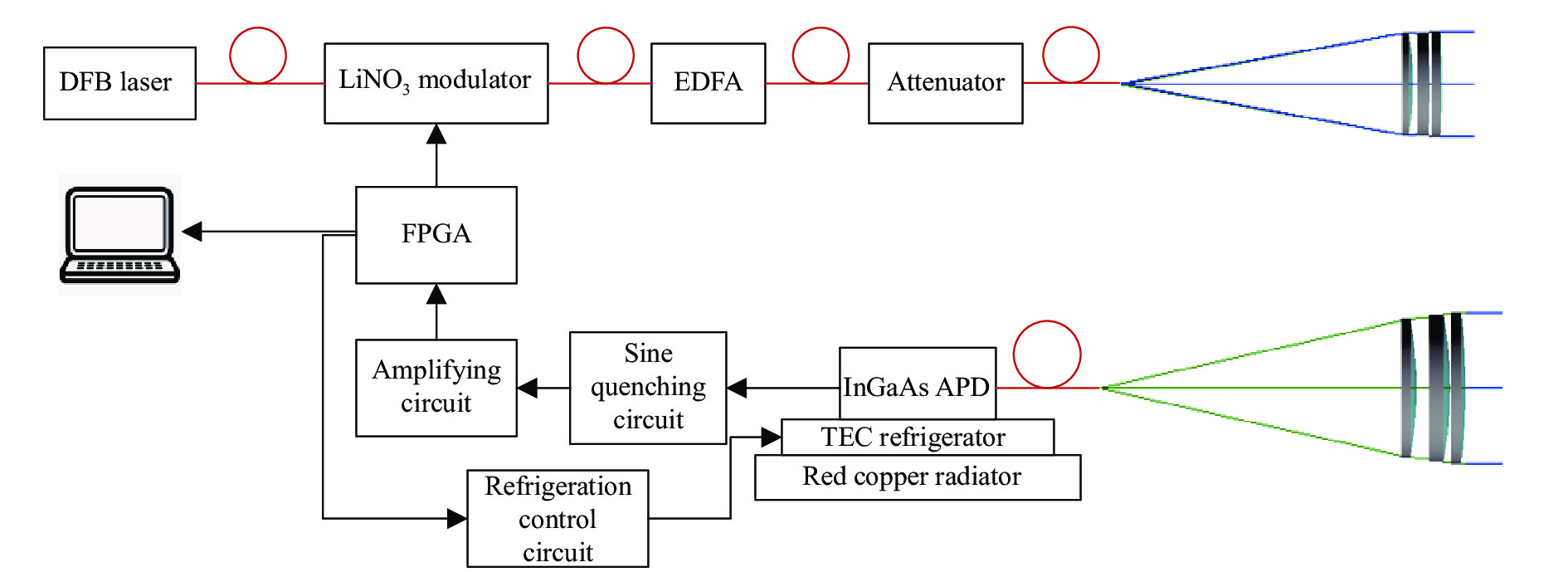
由于高轨阴影区非常短暂,需要考虑太阳入射角确定时的探测角度。由公式(3)可知,当探测距离距离为20 km时,信噪比SNR与反射光夹角α及发射功率PT的关系如图3所示可实现较大观测角范围的探测需求。
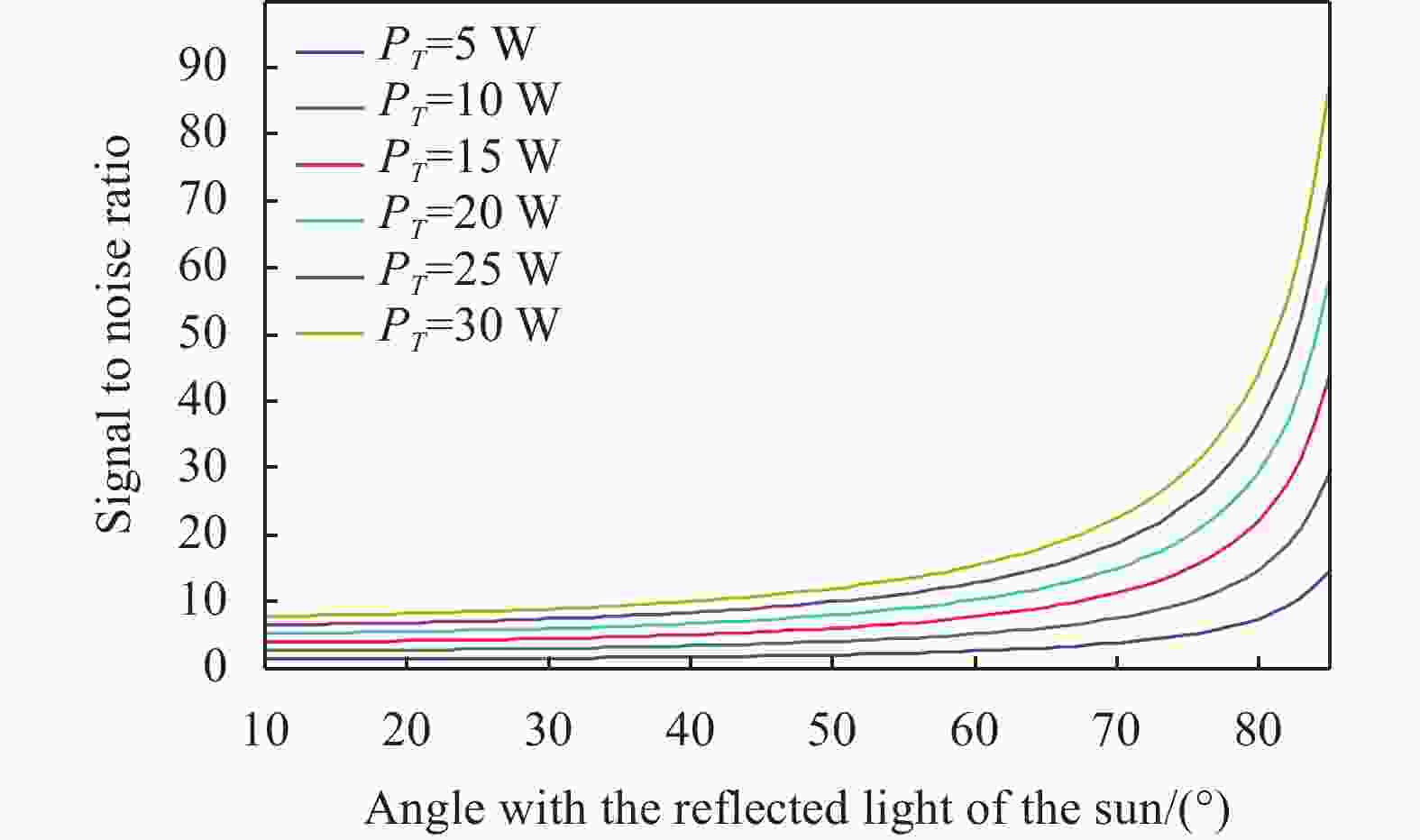
Figure 3. Relationship between angle with the reflected light of the sun and SNR
当探测距离发生变化时,信噪比变化如图4所示。20 km距离处,激光回波信噪比优于5。

Figure 4. Relationship between detection range and SNR
由图形可分析出,当光学天线口径固定时,提高激光峰值功率可以在一定范围内对信噪比有明显提升。当发射功率固定、观测角接近垂直时,激光雷达接收光学系统接收到的噪声光子越少,其信噪比明显增加。考虑到接近过程的时间,选择激光发射功率为20 W时,接近停靠过程中信噪比SNR大于5。
因此,选择光学天线口径为0.1 m,激光发射峰值功率为20 W时,能够获得较高的信噪比,且满足系统的探测精度要求,详细指标情况如表2所示。
Composition Item Specification Laser and transmitting optical system Wavelength/nm 1 550 Modulation frequency/MHz 100 Pulse width/ns 10 Laser pulse energy/nJ 20 Numerical aperture 0.09 Divergence angle/mrad 0.1 Mode-field diameter/mm 23 Receiving optical system Receiver aperture/mm 100 Optical efficiency 50% Optical band width/nm 5 Focal length/mm 354 Photon counting Detection probability ≥18% Photon counting rate/MHz 200 Dark count rate/kHz 20 Range resolution/m 3 Cumulative frequency 214−1 Table 2. Main specifications of long distance space ranging lidar











-
由于伪随机码测量激光雷达选通时间长,受大气后向散射影响较大,市区测量影响较大[13-14]。而空间应用背景无需考虑后向散射造成的影响。因此在探测过程中,通过增加衰减器,可以在实验室内模拟实际探测过程。
通过上位机调整激光供电电流、电压以及EDFA泵浦电流等可以控制出射光信号的功率。试验中,统计100次回波数据进行累计测量[10]。
实验中使用80 mW平均功率激光器作为输出端,经过强度调制器进行伪随机码调制后,使用衰减器控制激光输出功率。接收端耦合至光纤中可以测量得到接收光功率。使用同样的连续激光器作为噪声光源,并使用衰减器进行功率调整,用于调整信号信噪比。信号光与噪声光功率均可调节,从而保证信号信噪比相对稳定。
使用全站仪对激光雷达光学安装板中心位置以及激光光斑位置的相对距离作为真值进行精度比较。
由于回波光束光轴与接收光学系统光轴不平行,在偏离光轴焦点的位置像差矫正不如光轴上理想,造成光斑增大,耦合效率降低。由于激光光源有部分能量波动,伪随机码调制后的码元分布并不十分规律,导致回波能量部分波动。实际的测量耦合效率约30%~40%。
由公式(6)可知,当伪随机码长度为14阶时,通过调整发射端激光衰减器,改变接收端耦合到探测器的信噪比可以改变测量结果精度。
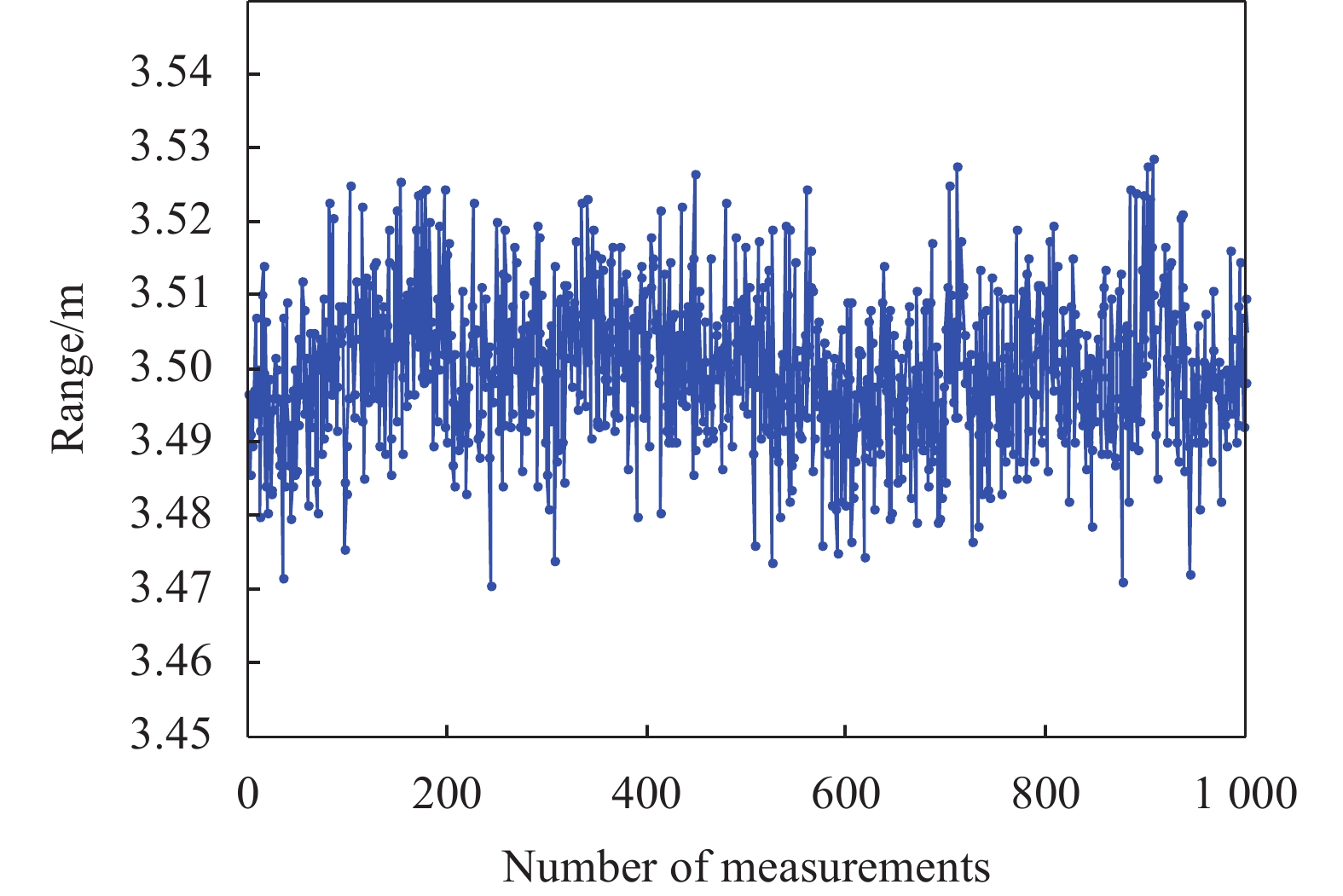
调整衰减倍数,由输出结果统计经信号与噪声的均方统计后得到系统的信噪比[10]约为5.6,此时输出探测距离结果如图5所示。

Figure 5. Range detection results (SNR≈5)
调整衰减倍数,信噪比约为13.44时,此时输出探测距离结果如图6所示。

Figure 6. Range detection results (SNR≈14)
当入射激光功率约−77.9 dBm时,信噪比约为5,100次累计情况下,最小二乘法计算结果如上图所示。距离测量结果较为稳定。测量真值为3.5 m时,测量均方根为1.66 cm,即测距精度为1.66 cm。调整输出光功率,使信噪比为14时,测量均方根为1 cm,即测距精度为1 cm。此结果与参考文献[10]中精度接近。因此,在调制频率受限时,通过多次累加和最小二乘统计能够有效提高测量精度。
-
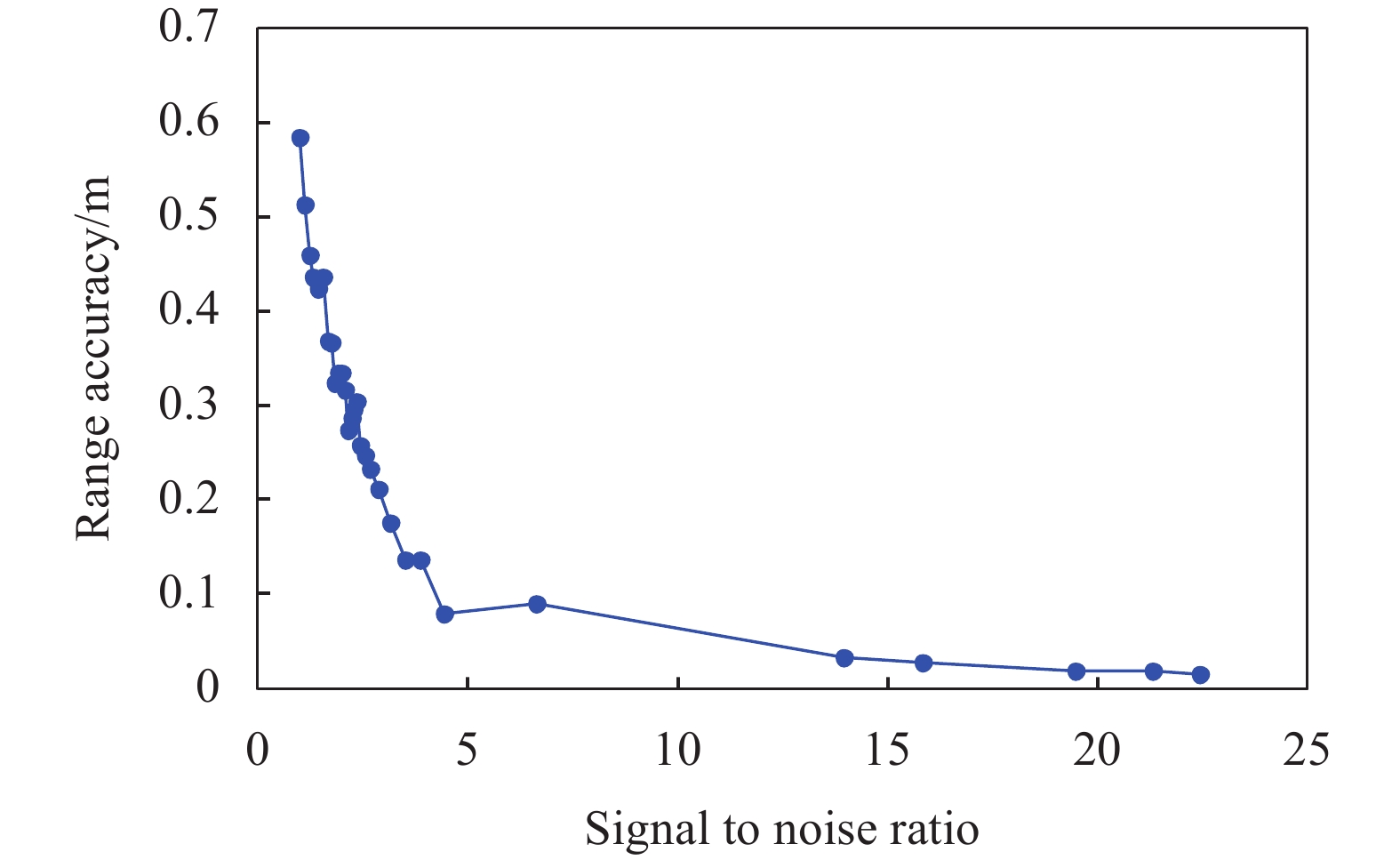
为了验证距离精度与信噪比关系,试验过程中,选择20 141 m光纤进行测距延时。通过调整入射光功率,使信噪比连续发生变化,在不同信噪比分别测量600组测距结果。计算不同信噪比情况下,当回波信噪比约为5时,回波信号相关峰较为明显,且测量结果较为稳定,计算后结果能够满足0.1 m探测精度。降低信噪比后,相关性明显下降,经计算,系统测距精度性能退化较为明显。试验过程中,测量精度与信噪比关系如图7所示。

Figure 7. Relationship between range detection accuracy and echo signal to noise ratio
从图中可知,当信噪比较低时,虽然能够偶尔探测到正确信号,但是探测结果精度较低。当信噪比提高后,距离精度明显提升。但是随着信噪比的进一步提高,距离精度改善效果逐渐放缓,这也从侧面印证了公式(6)中信噪比与距离精度的关系。
试验结果中出现了随着信噪比增加测距精度反而变差的情况,分析可能的原因包括:(1)环境热辐场变化,导致盖革APD工作点轻微漂移;(2)探测环境非暗室,环境光场波动导致探测过程中信噪比轻微变化。
-
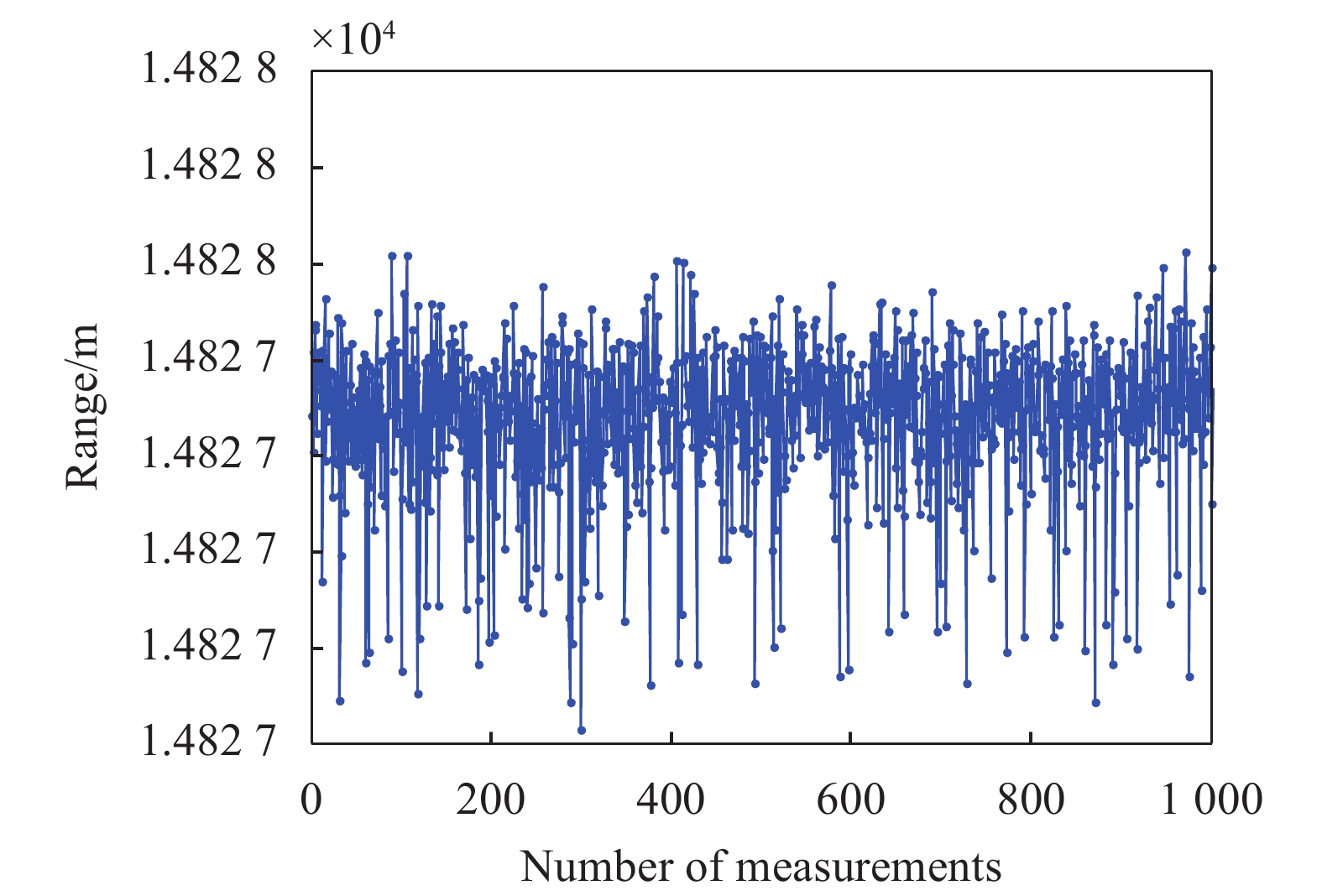
保持输入光功率不变,改变累计次数为50次时,探测距离结果如图8所示。

Figure 8. Range detection results (The cumulative number of times is 50)
累计次数为50次时,使用20 141 m激光进行延时后,测距真值为14 827.3 m时,测量均方根为15.83 cm,即测距精度为15.83 cm。可以看到,累计次数减小后,测量精度大幅下降。因此,累计次数与测距精度正相关。
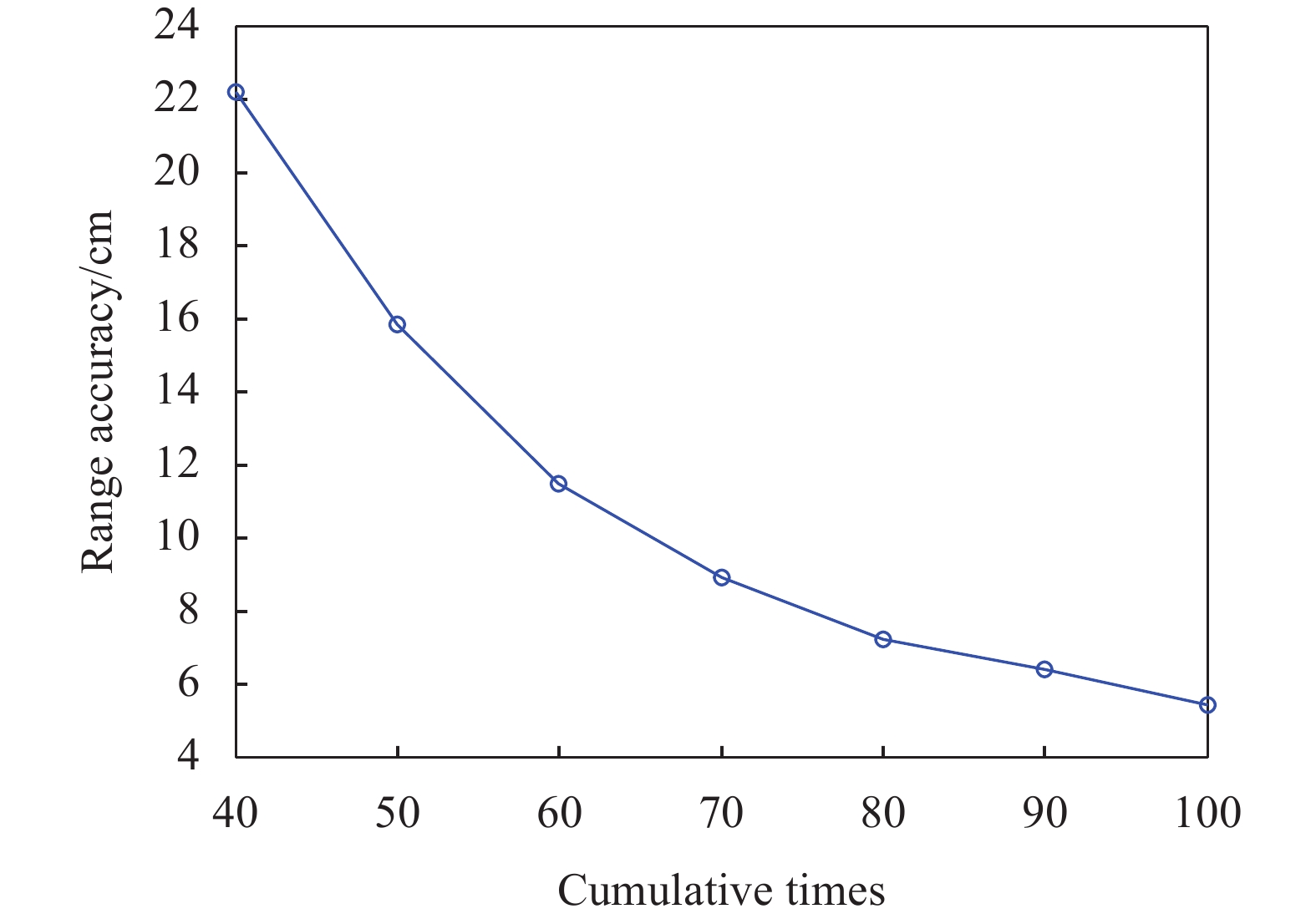
改变测量累计次数,使用1000次测量结果进行统计,可以得到累计次数与测量精度变化关系情况,如图9所示。

Figure 9. Relationship between cumulative times and distance accuracy
由图8可知,距离精度随累计次数增加而增加,说明增加累计次数也增加了系统探测次数,从而提高了信噪比。从图中分析可知,入射功率不变时,累计次数增加到100次后,距离精度提升速度减缓。累计次数增加到一定程度后,无限增加累计次数并不能有效提高系统距离精度。从硬件角度看,增加累计次数也会增加资源开销,影响数据输出速度。
-
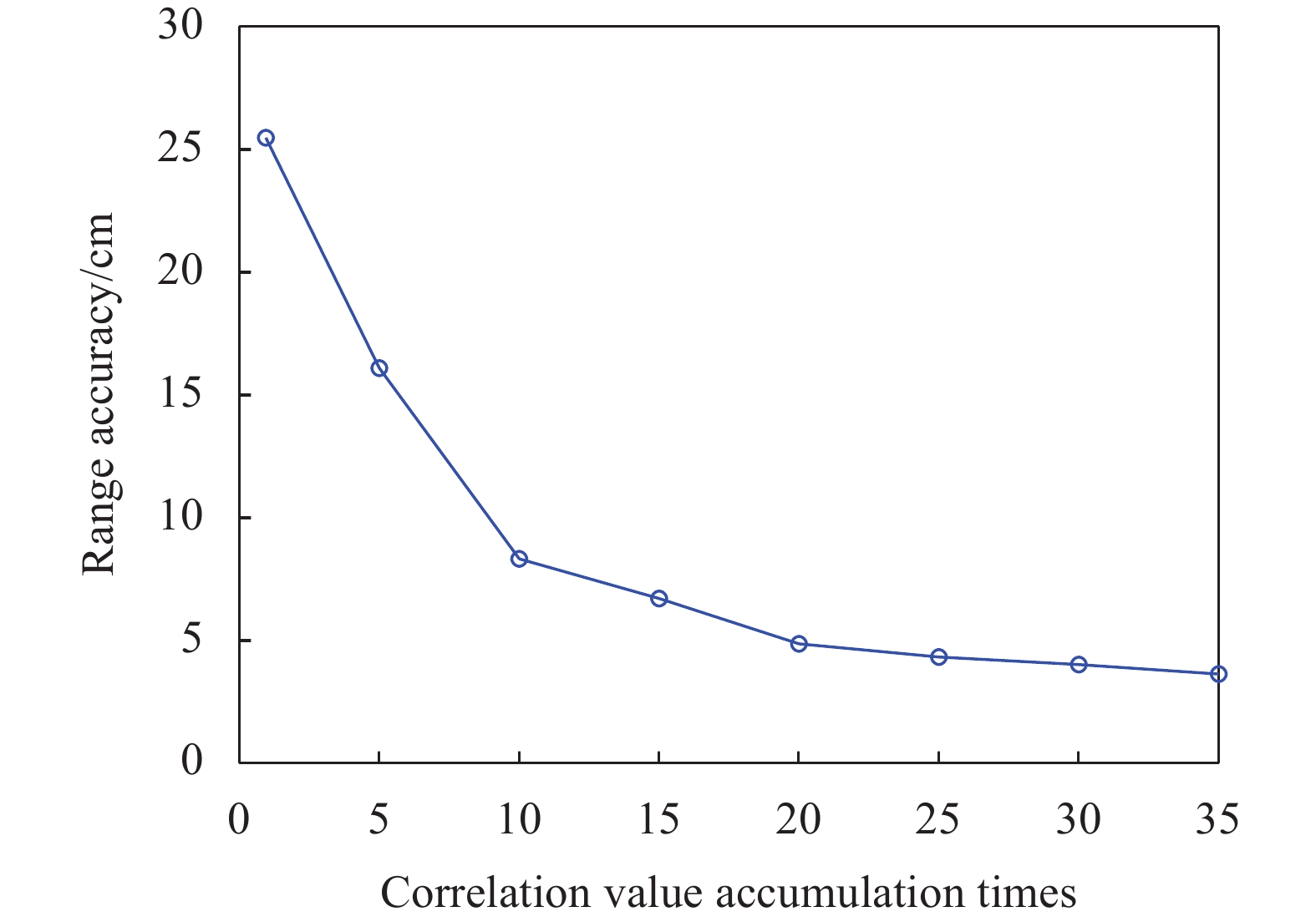
相关峰值累加其实也是一种通过后处理的方式提高信噪比的手段。累加的次数越多,累加的结果越接近高斯分布。高斯分布的均值位置判断越精确。改变上位机软件中相关峰值累加次数,使用1000次测量距离精度统计结果进行分析,如图10所示。

Figure 10. Relationship between accumulated times of correlation value and distance accuracy
从测量结果中可知,增加相关结果的累加次数,确实可以增加探测距离的精度。与在FPGA中增加累计次数类似,本质上也是通过增加探测次数提高了系统信噪比。后处理累加后再做最小二乘计算,能够将几部分计算转移到上位机中进行处理,从而减轻FPGA上资源的消耗。虽然累加次数增加对测量结果的精度影响也是逐渐放缓的,但是由于资源消耗小,最小二乘法计算量也较小,不会影响到上位机的处理运行,对最终结果的输出影响也相对较小,所以不失为一种有效的距离精度提升手段。
伪随机码调制的测距激光雷达由于调制频率、探测速率高,具有较多通过后处理和统计方法提高距离精度的可能性。且由于系统峰值功率较低,激光器研制难度较低,技术成熟度较高,易于后续集成处理,具有独特的发展前景。图11为系统集成效果。

Figure 11. Configuration and internal structure of ranging lidar system
3.1. 测距试验结果
3.2. 不同信噪比下距离精度关系
3.3. 累计次数与距离精度关系
3.4. 相关峰值累加次数与距离精度关系

-
文中剖析了星载激光测距样机系统组成,通过分析系统参数对伪随机码调制激光测距理论进行了分析。由理论分析可知,提高测距精度的方法有两种:(1)提高单脉冲能量;(2)提高测量次数。对于空间远距离测距任务,且相对运动速度不高,选择伪随机码调制的激光测距雷达一方面可以提高测量次数,另一方面可以通过相关计算滤除不相关的背景噪声,因此信号信噪比大幅增加,从而提高了测距精度。
随后,对设计研制的激光雷达进行了测距试验。试验表明,调制频率100 MHz时,在FPGA中使用100次回波信号累计,并在上位机中使用20次相关峰值累加后,在信噪比不小于5时,系统测距精度可以提升至1.66 cm。
随后讨论了信噪比与距离探测精度的关系。并通过讨论在FPGA中改变回波信号累计次数,以及上位机中相关峰值累加次数,对距离精度的影响。目前,提高测距精度的主要手段为两种:(1)提高调制频率,但是对探测器频率、FPGA计算能力等指标也提出了更高要求;(2)增加测量次数。这两种方法本质上都是增加测量次数。在保证系统基本指标要求的条件下,通过后处理的方法可以有效地提高系统的测距精度指标。
伪随机码调制的激光雷达是一种结构简单、测距精度高、测量结果可靠、探测距离范围广的激光雷达。对于交会对接任务中,目标由远及近的过程,伪随机码调制的激光雷达具有极高的适应性。后续随着芯片计算能力的提升,探测器响应时间的减小,多探测器分时探测等技术的不断成熟,伪随机码调制的测距激光雷达将会迎来更广阔的发展前景。

 DownLoad:
DownLoad: