







-
卫星激光测高技术因为可以快速获取全球高精度高程信息,而受到广泛关注,并逐渐成为星载激光雷达的重要组成部分[1]。美国国家航空航天局先后于2003年、2018年发射了冰、云和陆地高程卫星(Ice、Cloud and land Elevation Satellite,ICESat)以及后续卫星ICESat-2,在极地变化监测、林业树高测量、高精度高程控制点获取等领域得到广泛应用[2-4]。而我国在该领域起步较晚,于2019年成功发射首颗搭载对地激光测高仪正式载荷的高分七号卫星(GaoFen-7, GF-7)[5-8]。
卫星激光测高技术定位精度取决于激光指向角测量精度[9],而指向角精度与光学仪器状态、航天器抖动、外界温度等因素息息相关[10]。激光光斑质心的坐标变化反映激光发射时刻的指向变化,同时受工作环境等因素的影响,光斑能量分布、形状特征等参数会发生相应的变化。ICESat上搭载了激光剖面阵列相机(Laser Profile Array, LPA),用于记录激光发射时刻的激光光斑影像,描述发射时刻激光能量分布、大小、形状等特征参数[11]。Sirota等人[12]通过统计激光质心在激光参考传感器(Laser Reference Sensor, LRS)框架中的坐标变化,发现与相对恒星运行引起的温度变化存在紧密联系,并获取了精确的激光指向信息。Van Waerbeke等人[13]提出一种点光源质心提取算法,通过确定光斑长、短半轴,实现光斑形状精确提取,但实验结果表明LPA光斑质心坐标提取精度较低。Quine B. M.等人[14]提出一种亚像元数据增强算法,通过像元插值增强影像上的光斑特征,将质心提取精度提升到原始像素分辨率的12.8倍。王海涌等[15]利用高斯灰度扩散模型估计光斑质心位置,并通过模拟数据验证了该方法的可靠性,但是并不适用于复杂因素影响下的光斑数据。袁小棋等[11,16]利用灰度重心提取算法获取LPA影像光斑质心坐标等参数,短周期实验数据表明激光指向角变化幅度为9″,但是当光斑范围内存在随机噪声时该方法效果较差。杨雄丹等人[17]利用灰度矩阵提取光斑质心,将质心提取精度提升到0.3 pixel,并通过傅里叶函数拟合长时序数据,发现坐标变化存在明显的周期性,为激光指向周期性误差修正提供支持。激光光斑质心提取对国产激光测高卫星数据质量控制以及激光指向稳度监测具有重要意义[18-19]。
高分七号卫星激光子系统除包含激光测高仪外,还包含激光足印相机、激光光轴监视相机[6]。激光足印相机与激光接收共用望远镜,主要用于捕获单个激光发射时刻的激光光斑、地物影像,借助足印影像可直观判断激光是否受到云的影响、激光光斑所在的地形地貌;光轴监视相机主要用于对两个激光束光斑进行成像,通过两者的相对位置判断激光发射光轴指向是否发生偏差,这种偏差可能是由于温度、仪器框架变形等因素引起的,需要光轴监视相机实时对发射激光光轴进行监测,但是在一定限度内不会影响激光器定位精度。利用激光光斑质心提取算法可以得出激光相对指向,足印相机和光轴监视相机将有助于提高激光地面定位的精度。
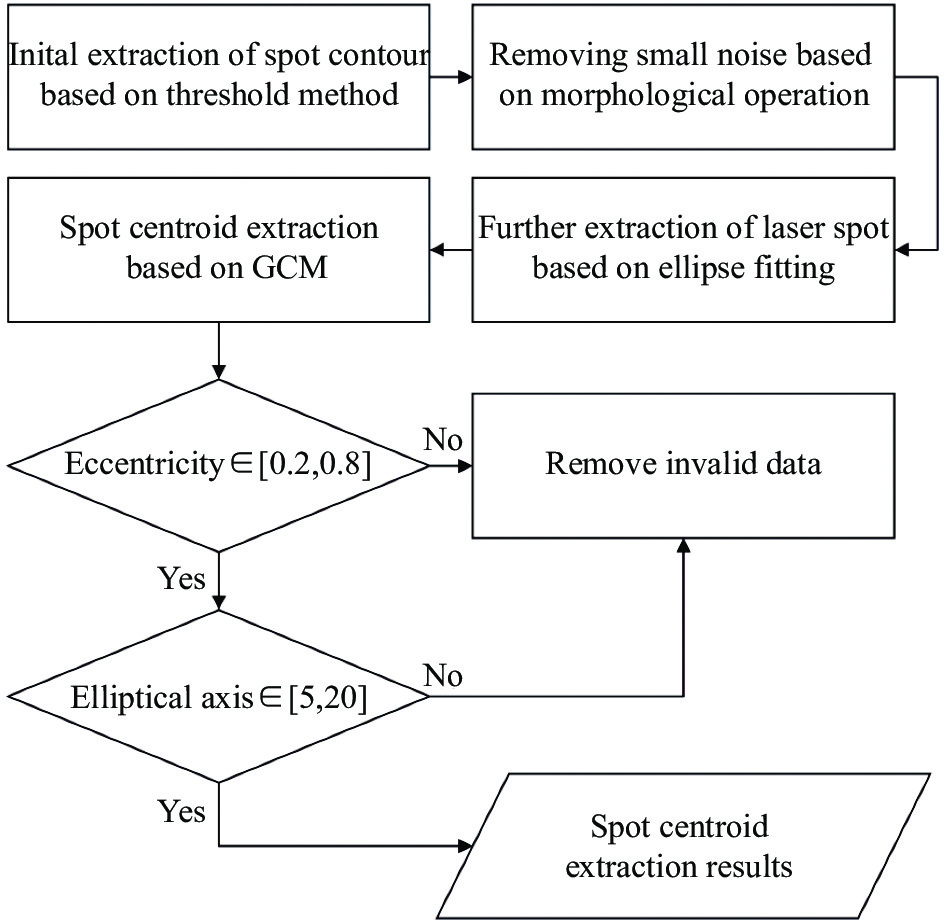
对于足印影像而言,光斑提取不可避免地会受到背景复杂地物的影响,尤其是高反射率地物,前文提到的传统算法难以有效提取质心坐标,因此文中提出了一种阈值约束的椭圆拟合质心提取算法,流程如下:(1)首先基于边界法初步确定光斑轮廓;(2)基于形态学运算进一步提取光斑轮廓,去除地物影响;(3)通过椭圆拟合进一步约束光斑形状;(4)利用灰度重心法提取光斑质心。
-
GF-7 卫星激光测高系统配备有两台激光足印相机(Laser Footprint Camera,LFC)、一台激光光轴监视相机(Laser Optical Axis Surveillance Camera,LOASC)。如图1所示,两台足印相机分别服务于两个激光器,在同步曝光模式下,足印相机同时对激光发射光斑和地物进行成像;光轴监视相机对光路内经多次扩束、反射得到的两个激光光斑成像,根据两者的位置关系实时监测仪器框架、温度等因素的变化。

Figure 1. Imaging mechanism of LFC and LOASC
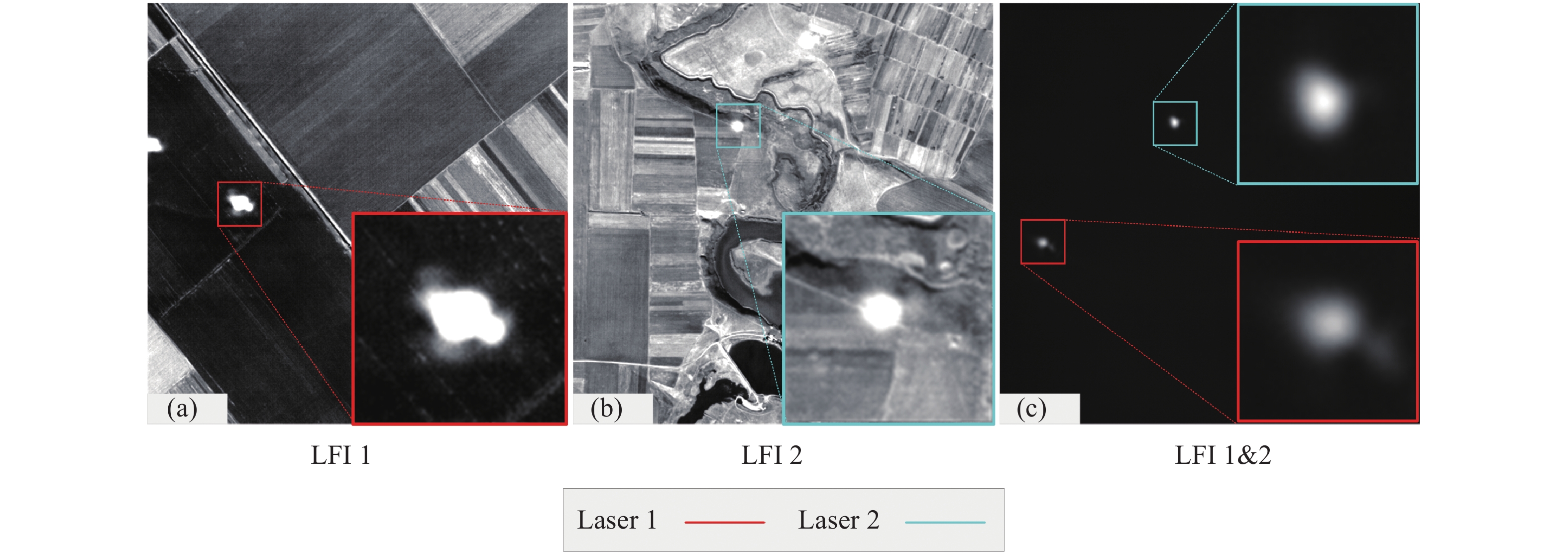
如图2所示,从左至右依次为激光足印影像1&2(Laser Footprint Image, LFI)、激光监视相机影像(Laser Surveillance-camera Image, LSI),大小均为550×550 pixel。其中,红色框选区域为对应影像上波束1的激光光斑,蓝色框选区域为对应影像上波束2的激光光斑,足印影像外围的“小光斑”是曝光时激光在面阵相机上的虚像。传统质心提取方法多是针对点光源、背景单一的影像,而足印影像同时对光斑、背景地物成像,能拍摄到云、砂石和冰川等具有高反射率的地物,这类地物的强度值与激光光斑强度值相叠加,增强了光斑的饱和,直接使用传统算法难以有效提取光斑质心。对于监视相机影像而言,由于背景单一,传统算法也能在质心提取方面取得较好的效果。
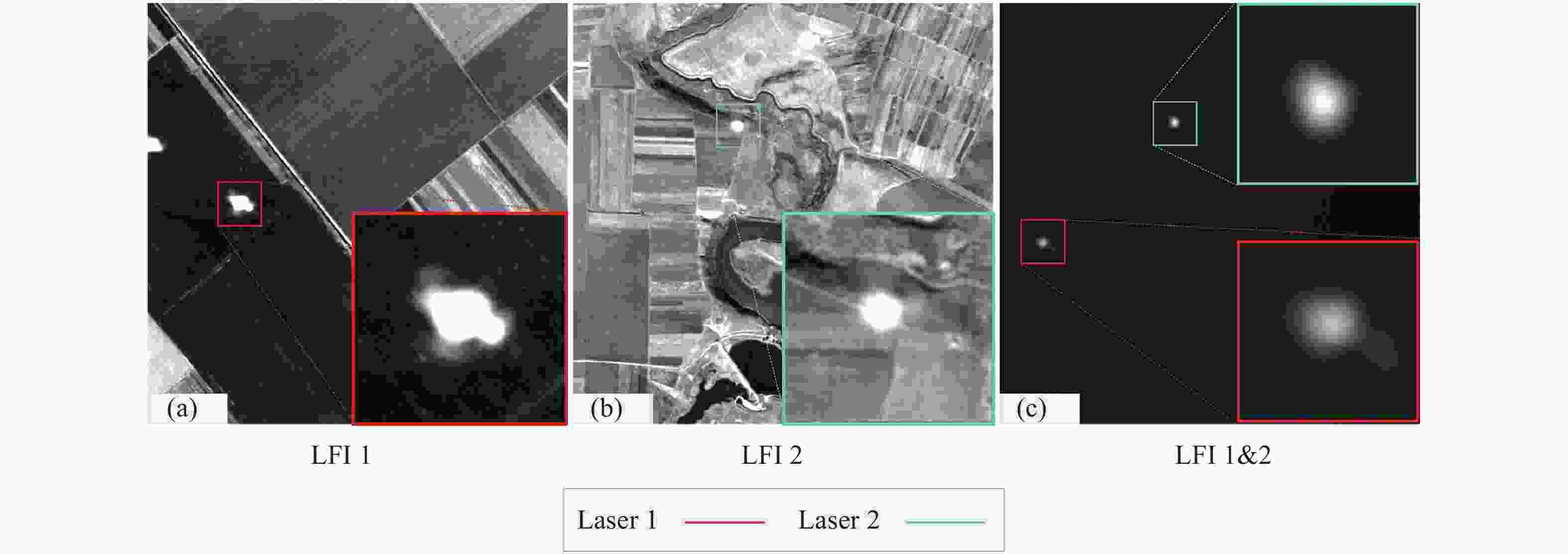
Figure 2. Distribution of laser spot on LFI and LSI
文中使用自然资源部国土卫星遥感应用中心提供的激光测高卫星标准测高产品SLA03作为实验数据,将GF-7在轨实测光斑质心坐标作为中心,向四周扩展20 pixel形成40×40的足印影像、监视影像切片。将影像左上角作为原点,定义像平面坐标系,对于足印影像而言,波束1光斑切片左上角像平面坐标为(102,242)、波束2光斑切片左上角像平面坐标为(198,143);对于监视影像而言,波束1光斑切片左上角像平面坐标为(40,291),波束2光斑切片左上角像平面坐标为(208,138)。
-
灰度重心法(Gray Centroid Method, GCM)是点光源质心提取经典算法,根据目标区域内灰度分布赋予不同的权重,计算光斑质心坐标,即使发射光斑形状并非严格的圆或椭圆型也能取得较好的效果,且计算复杂度较低,但是直接使用该方法无法避免足印影像中高反射率地物的影响。计算方式如公式(1)、(2),其中(X,Y)是该光斑的质心坐标,I(i,j)代表影像上第i行第j列的灰度值,M、N代表影像行列的最大值、最小值。
-
对于足印影像而言,光斑以及周围区域会受到地表地物的影响,高反射率地物会影响传统算法结果。文中提出一种阈值约束的椭圆拟合算法(Threshold constrained for extracting centroid of Ellipse Fitting Method, TEFM),如图3所示,分为以下几步。

Figure 3. Flowchart of the algorithm
(1)去除背景地物影响。提取光斑所在位置的足印影像切片,每个像元可视为光斑与地物相互叠加的效果。经过统计大量数据,发现背景区域灰度分布直方图往往在2 000~3000范围内聚集。切片影像去除地物影响,整体灰度值幅值减去2 000,如图4(a)所示;

Figure 4. Threshold constraint algorithm for extracting centroid of ellipse fitting
(2)基于阈值法初步提取光斑轮廓。利用公式(3)计算阈值T、确定光斑的初提取结果,作为第一次约束,将小于阈值的像元赋值为0,图4(b)为处理结果,存在一部分云区域被误识别:
(3)形态学处理去除噪声。对初提取结果进行形态学腐蚀处理,作为第二次约束,去除细小噪声、孔隙、地物细节纹理特征的影响,避免对后续步骤造成影响,很大程度上保留、贴近光斑形状。如公式(4)所示,腐蚀处理为提取每个像素邻域D1内局部最小值的过程。图4(c)为处理结果,如图所示,腐蚀处理去除了红色框选区域的像元。
(4)椭圆拟合约束光斑形状。将腐蚀结果代入公式(5)、利用最小二乘进行椭圆拟合[16],求解目标函数f的最小值确定各系数。将椭圆轮廓作为第三次约束,将边界外的像元赋值为0,并保留光斑特征参数,如图4(d)所示;
(5)利用灰度重心法实现光斑质心提取。将步骤(4)中的结果作为输入,利用公式(1)、(2)计算质心坐标;
(6)基于光斑特征参数去除粗差。足印影像上的地物信息很有可能会掩盖光斑信息,甚至无法提取光斑轮廓形状,此情况会在业务化处理中带来大量的误差,因此根据偏心率、长短半轴等光斑特征去辨别是否成功提取光斑信息,借此去除误差。由于出光角度、仪器内部框架等因素,理想光斑偏心率往往在0.2~0.8之间。经过实际检校,激光光斑直径在17~20 m(波束1 19 m、波束2 21 m)之间、对应5~7 pixel,但是为了捕捉更多的光斑轮廓信息,将这一阈值扩大到理想发散光斑边缘,取值为20。
-
激光定位精度高度依赖于指向角精度,而指向角变化难以直接通过激光产品直接得到。通过激光光斑质心坐标变化可以分析指向角相对精度,间接监测指向角稳定度,为激光产品提供关于指向角变化相关的质量控制参数。质心坐标变化与激光指向变化之间的关系,由以下准则确定:足印相机视场角为0.19°,激光脉冲经过4倍扩束到达地面形成足印光斑,对应每像元分辨率为1.5 μrad,所以光斑质心坐标每偏移一个像素,指向角变化约0.31″。对于光轴监视相机影像而言,主要作用是基于两波束光斑质心位置的相对关系监测光学仪器内部框架是否变化。之后,会围绕足印影像、监视影像之间的几何关系,进一步探索激光两波束之间相对关系,建立光轴几何关系变化模型,实现激光光轴夹角的变化监测。
为了验证文中方法精度的可靠性,如图5所示分别采用夜间升轨、背景为复杂地物的足印影像作为实验数据,红、蓝、黄色圆点分别对应质心标定位置、文中方法质心提取结果、灰度重心法质心提取结果。如图5(a)所示,夜间条件、避免复杂背景的情况下,文中方法质心提取精度在0.05 pixel以内,灰度重心法质心提取精度在0.08 pixel左右;如图5(b)所示,在复杂地物影响下,文中质心提取精度在0.08 pixel以内,优于灰度重心法结果约2.5 pixel。灰度重心法的误差主要来源于光斑轮廓附近的曝光色散、背景地物的影响,而文中方法通过多次约束去除了这些干扰因素。在背景地物更为复杂的条件下,灰度重心法与文中算法的差距还会更大。
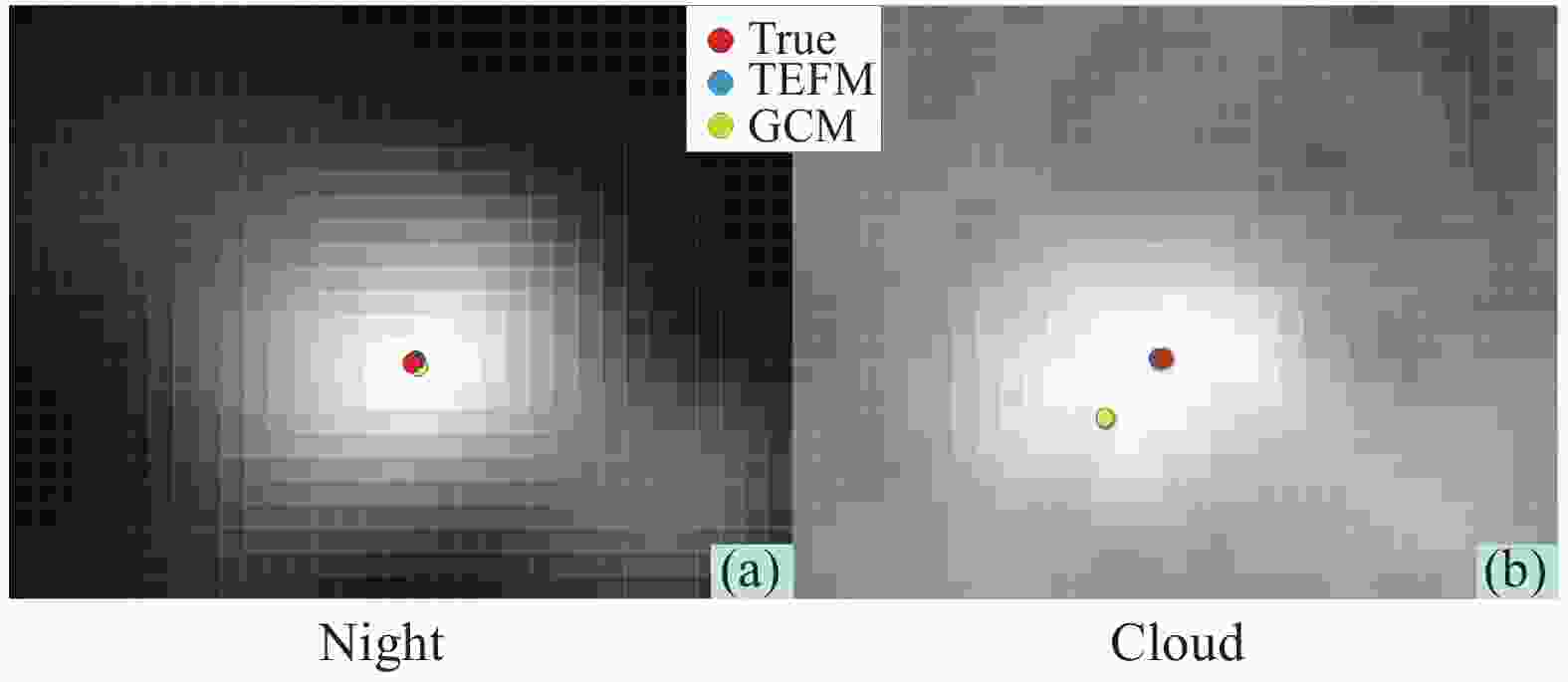
Figure 5. Accuracy analysis of proposed algorithm
为了检验文中所提出的TEFM算法精度,随机抽选时间相近、地物类型丰富的足印影像共1 600张进行精度验证(见表1)。将两波束在轨标定位置作为真实值,分别计算坐标误差均值(Mean)、坐标误差极值(Range)、坐标分布均方根误差(RMSE),统计结果表明:传统算法在复杂背景下基本不具备提取光斑质心能力,文中采用的TEFM算法在稳定性、整体提取精度均保持较高水平,优于传统算法一个量级,满足复杂背景条件下亚像素级的质心提取需求。
Method Mean Range RMSE X Y X Y X Y GCM 2.565 2.522 4.941 5.185 2.512 2.218 TEFM 0.062 0.071 0.092 0.088 0.052 0.081 Table 1. Accuracy evaluation of centroid extraction algorithm for footprint image(Unit: pixel)
-
对2020年3月15日至30日共计61轨足印相机影像数据进行质心提取,获取足印影像8.6万张,其中有27%的影像由于被云遮盖、过曝等原因丢失光斑轮廓信息,无法进行质心提取。实验结果如图6所示,横坐标表示X方向、纵坐标表示Y方向。图6(a)为波束1光斑质心坐标统计结果,坐标均值为(120.83,263.71),X方向在0.4 pixel左右来回震荡,Y方向在0.5 pixel左右来回震荡,平面位置变化在1 pixel以内;图6(b)为波束2光斑质心坐标统计结果,坐标均值为(216.32,162.51),X方向在0.5 pixel左右来回震荡,Y方向在0.5 pixel左右来回震荡,平面位置变化在1 pixel以内。可以得出初步结论:(1)相比于传统算法,文中所改进的算法能有效提取复杂地物背景下的光斑质心;(2)在每月内质心坐标变化比较稳定,在X、Y方向均小于1 pixel的幅度震荡。

Figure 6. Spot centroid coordinate statistics of LFI of laser 1 (a) and laser 2 (b)
建立长时间序列激光指向监测系统,长时间序列质心提取的难点在于剔除粗差的同时保留质心坐标本身的变化趋势。尽管文中采用了多个条件约束光斑轮廓,精确定位光斑质心位置,但背景地物对光斑的影响仍不能完全去除,带来粗差,使光斑质心坐标出现跳变,破坏本有的坐标变化趋势。出现粗差的情形主要有以下两种:(1)高反射率地物完全遮盖了光斑轮廓;(2)光斑本身幅值较低、比较黯淡,光斑特征被地物特征淹没。经过大量统计,发现偏心率、半轴长度等光斑特征参数能有效识别粗差,提升整体识别精度。为了分析足印光斑质心变化及稳定性,从宏观、微观两个角度展开分析。
如表2所示,为了分析足印影像光斑质心在轨运行以来长周期内的稳定性,统计了2020年3月至2021年4月每月光斑质心坐标均值。如图7(a)、(b)所示,对于波束1而言,质心坐标在X方向上整体呈现减小趋势,变化约0.4 pixel,在Y方向上整体呈现减小趋势,变化约1 pixel,平面位置变化约1.1 pixel,对应指向角变化约0.341″;如图7(c)、(d)所示,对于波束2而言,质心坐标在X
方向上呈现先减后增大的趋势,变化约0.4 pixel,在Y方向上整体呈现减小趋势、变化约1.5 pixel,平面位置变化约1.4 pixel,对应指向角变化约0.434″。实际上,不论是波束1还是波束2,每月光斑质心变化不是朝着某一方向一直移动的,每月变化幅度在一个非常小的范围内。 Time LFI Laser 1 Laser 2 X Y X Y 2020 Mar. 120.83 263.71 216.32 162.51 Apr. 120.50 264.51 216.88 162.63 May 120.35 263.88 216.85 162.56 Jun. 120.37 263.79 216.87 162.36 Jul. 120.52 263.90 216.93 162.10 Aug. 120.63 263.28 216.81 161.65 Sep. 120.51 262.26 216.72 161.53 Oct. 120.11 261.85 216.35 161.60 Nov. 120.33 262.02 216.42 161.64 Dec. 120.37 262.30 216.31 161.82 2021 Jan. 120.49 262.55 216.00 161.65 Feb. 120.36 262.55 216.81 161.17 Mar. 120.45 262.67 216.62 161.68 Apr. 120.43 262.63 216.63 161.07 Table 2. Statistical results of monthly mean of spot centroid coordinates of LFI (Unit: pixel)

Figure 7. Changes of centroid of two beams in X and Y directions on LFI
-
此节使用2.2节中对应的激光光轴监视相机数据,波束1、2质心坐标统计结果如图8所示,横坐标表示X方向、纵坐标表示Y方向。相比于足印影像,监视影像质心提取算法较少受外界因素影响,仅使用传统算法就能获取精度较高的结果。左侧为波束1光斑质心坐标统计结果,坐标均值为(57.18, 313.10),X方向在0.9 pixel左右来回震荡,Y方向在0.5 pixel左右来回震荡,平面位置变化在1 pixel以内;右侧为波束2光斑质心坐标统计结果,坐标均值为(228.01,156.67),X方向在1 pixel左右来回震荡,Y方向在0.7 pixel左右来回震荡,平面位置变化在1.2 pixel以内。相比于激光足印影像,即使在每月内监视影像质心也会发生较大的偏移,为了保证均值在数据中具有代表性,之后将每月数据中比例较小的异常点排除,不计入统计。

Figure 8. Centroid coordinate statistics of LSI of laser 1 (a) and laser 2 (b)
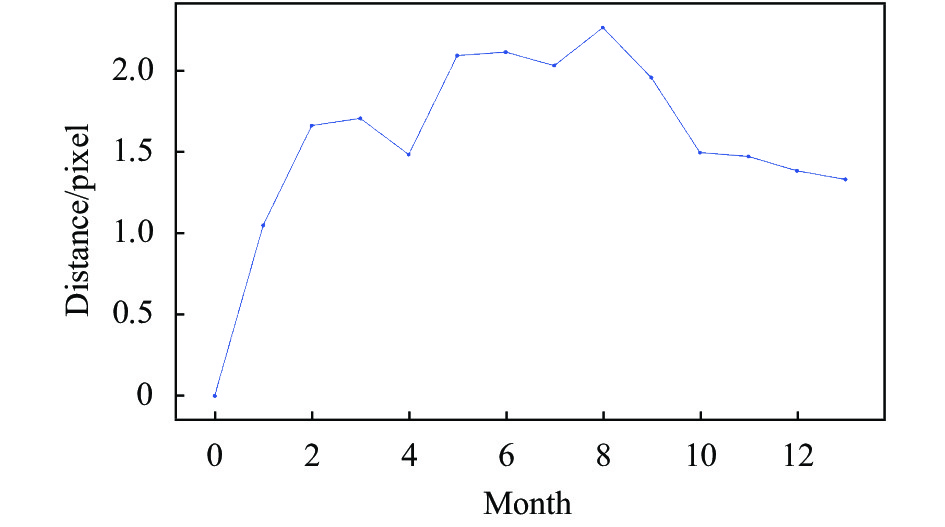
如表3所示,为了分析激光监视影像光斑质心在轨运行以来长周期内的稳定性,统计了2020年3月至2021年4月每月光斑质心坐标均值、影像上两光斑间距离变化,距离变化以3月波束1、2光斑质心之间的距离作为基准。对于波束1而言,长周期内X方向减小了0.7 pixel,Y方向减小了0.2 pixel,平面位置变化约0.7 pixel;对于波束2而言,长周期内X方向增大了0.8 pixel,Y方向减小了0.4 pixel,平面位置变化约0.9 pixel。如图9所示,两光斑间距先增大再减小,可能呈现一定的周期性变化。两光斑的距离变化表示仪器内部框架发生了一定变化,可能受到温度等内应力因素影响。
Time LSI Distance between
two spots in the LSILaser 1 Laser 2 X Y X Y 2020 Mar. 57.18 313.10 228.01 156.67 0 Apr. 56.93 313.35 228.63 156.31 1.05 May 56.51 313.39 228.84 156.14 1.66 Jun. 56.41 313.35 228.79 156.09 1.71 Jul. 56.52 313.32 228.81 156.29 1.48 Aug. 56.08 313.68 228.77 156.18 2.09 Sep. 55.99 313.75 228.68 156.22 2.11 Oct. 55.77 313.63 228.82 156.62 2.03 Nov. 56.08 314.031 228.71 156.22 2.26 Dec. 55.93 313.74 228.67 156.50 1.95 2021 Jan. 56.22 313.62 228.56 156.62 1.49 Feb. 56.50 313.51 228.79 156.49 1.47 Mar. 56.47 313.62 228.59 156.56 1.38 Apr. 56.48 312.99 228.82 156.25 1.33 Table 3. Statistical results of monthly mean of spot centroid coordinates of LSI (Unit: pixel)

Figure 9. Change of distance between spots in the LSI
-
文中基于高分七号卫星激光足印相机、光轴监视相机影像特点,提出一种阈值约束的椭圆拟合质心提取算法,并基于该方法分析高分七号在轨运行以来光斑质心变化。相关结论如下:
(1)相比于传统算法,文中所改进的算法能精确提取复杂地物背景下的激光足印影像光斑质心坐标,质心提取精度在0.08 pixel以内,优于灰度重心法结果约2.5 pixel。
(2)在足印影像上,波束1平面位置变化约1.1 pixel,对应指向角变化约0.341″;波束2平面位置变化约1.4 pixel,对应指向角变化约0.434″。表明高分七号卫星激光测高仪在轨后质心位置变化很小,激光器的内部稳定精度处于较高水平。
激光变化精确指向难以直接通过激光产品获得,文中借由足印影像激光光斑质心提取实现了指向长周期变化监测,作为一种可行的技术手段值得深入研究。基于现有结论可进一步挖掘多波束光轴几何关系,开展激光安装角、卫星姿态等影响平面精度的外部因素变化分析,有望进一步提高卫星激光测高定位精度。希望文中的有关研究能引起更多学者的关注,最终有效提高国产激光测高卫星的平面定位精度。
Analysis on the change of GF-7 satellite laser altimeter spot centroid position
doi: 10.3788/IRLA20210539
- Received Date: 2021-08-05
- Rev Recd Date: 2021-09-02
- Publish Date: 2021-11-02
-
Key words:
- GF-7 /
- satellite laser altimetry /
- laser footprint image /
- centroid extraction /
- stability analysis of pointing angle
Abstract: GF-7 satellite is equipped with the first laser earth observation altimeter with full waveform recording ability in China, which can obtain a wide range of high-precision three-dimensional coordinates, and its positioning accuracy is highly dependent on the measurement accuracy of laser pointing angle. According to the characteristics of data, a centroid extraction algorithm of ellipse fitting spot with threshold constraint was proposed, and a long-period pointing angle stability monitoring system was established. Firstly, the threshold method was used to determine the edge of the laser spot contour. Secondly, the influence of porosity and noise was eliminated through corrosion operation. Then, the shape of the laser spot was further constrained by ellipse fitting, and the characteristic parameters of the laser spot were preserved. Finally, the centroid coordinates were extracted by using the gray gravity center method. The experimental results show that the centroid position of the spot changes within 1.4 pixel, and the corresponding pointing angle changes within 0.434″ per month, which is relatively stable. The related algorithms and conclusions in this paper have certain reference significance for the development of laser altimetry satellites and the monitoring of pointing stability in China.






 DownLoad:
DownLoad: