





-
星敏感器是卫星控制系统中三轴姿态测量精度最高的单机,其精度可达到角秒级甚至亚角秒级。精度是星敏感器最重要的性能指标,随着星敏感器技术不断发展,其性能不断提升,对精度评价方法准确性与适用范围的研究也不断深入[1-3]。
随着卫星技术的不断发展,大角度快速机动已成为在轨常见的工况[4]。星敏感器在大动态条件下,在积分时间内,星点在探测器上位移量增大,像斑呈条纹状,降低了恒星质心提取精度,进而降低星敏感器精度。如何有效地评估与测试大动态条件下星敏感器的测量精度(X/Y轴精度)成为重要问题[5-6]。
已有的精度评价方法无法有效评估大动态条件下星敏感器的测量精度。基于动态光学恒星模拟器可开展星敏感器在动态条件下的测试,利用其高刷新率动态模拟不同角速度下的恒星位置,星敏感器探测和识别动态模拟的恒星,输出姿态信息。受限于成像机理,目前光学恒星模拟器对星点位置的刻画精度一般为30″,远低于星敏感器测量精度,且恒星模拟器不能完全真实地模拟恒星光谱类型与星等,因此该方法一般只用于动态性能的功能测试,无法评估精度[7]。另一种常用的动态测试方法是地面观星法。动态测试时,采用转台模拟星体在轨的姿态机动,星敏感器面对动态变化的真实星空探测和识别恒星,但用于地面观星的转台误差一般与星敏感器测量误差相当或者大于星敏感器测量误差,且转台运动过程中很难建立更高精度的姿态基准,因此,在这种情况下使用常用的滑动窗口法评价星敏感器的动态精度,其结果往往包含了设备误差,不能真实反应星敏感器测量精度[8]。基于转台和单星模拟器的测试方法,仅能以单星测角的方式评估精度,无法模拟真实的星空对姿态测量精度进行测试,该方法仅地面使用,无法评估星敏感器在轨精度[9]。基于光轴夹角法的测试,该方法对地面观星试验与在轨数据分析均可使用,但一般需要同规格的共基准安装的两台星敏感器同步曝光,约束条件较多,对测试系统的要求较高[10]。基于星惯联合的动态精度测试方法,系统最为复杂,需要引入陀螺进行联合测试,且测量精度无法剥离陀螺误差和时间基准误差[11-12]。
基于星对角距的不变性,文中提出一种适用于动态条件的精度评价方法,该方法同时适用于星敏感器在轨精度评价与地面观星测试。基于依巴谷星表中恒星位置的准确信息,可以得到毫角秒级精度的星对角距信息。星敏感器对星对角距的测量仅与对恒星的质心提取精度相关,可有效剥离转台位置误差、时间基准误差等因素。从星对角距入手,可得到星敏感器对恒星的质心提取精度,进而可以得出姿态测量精度。星敏感器在轨飞行时,由于星上没有精度更高的姿态敏感器,在卫星姿态机动时可以用于星敏感器精度评估的有效基准只有恒星星对角距。因此,在动态条件下,采用该方法评价星敏感器精度具有较高的置信度。
-
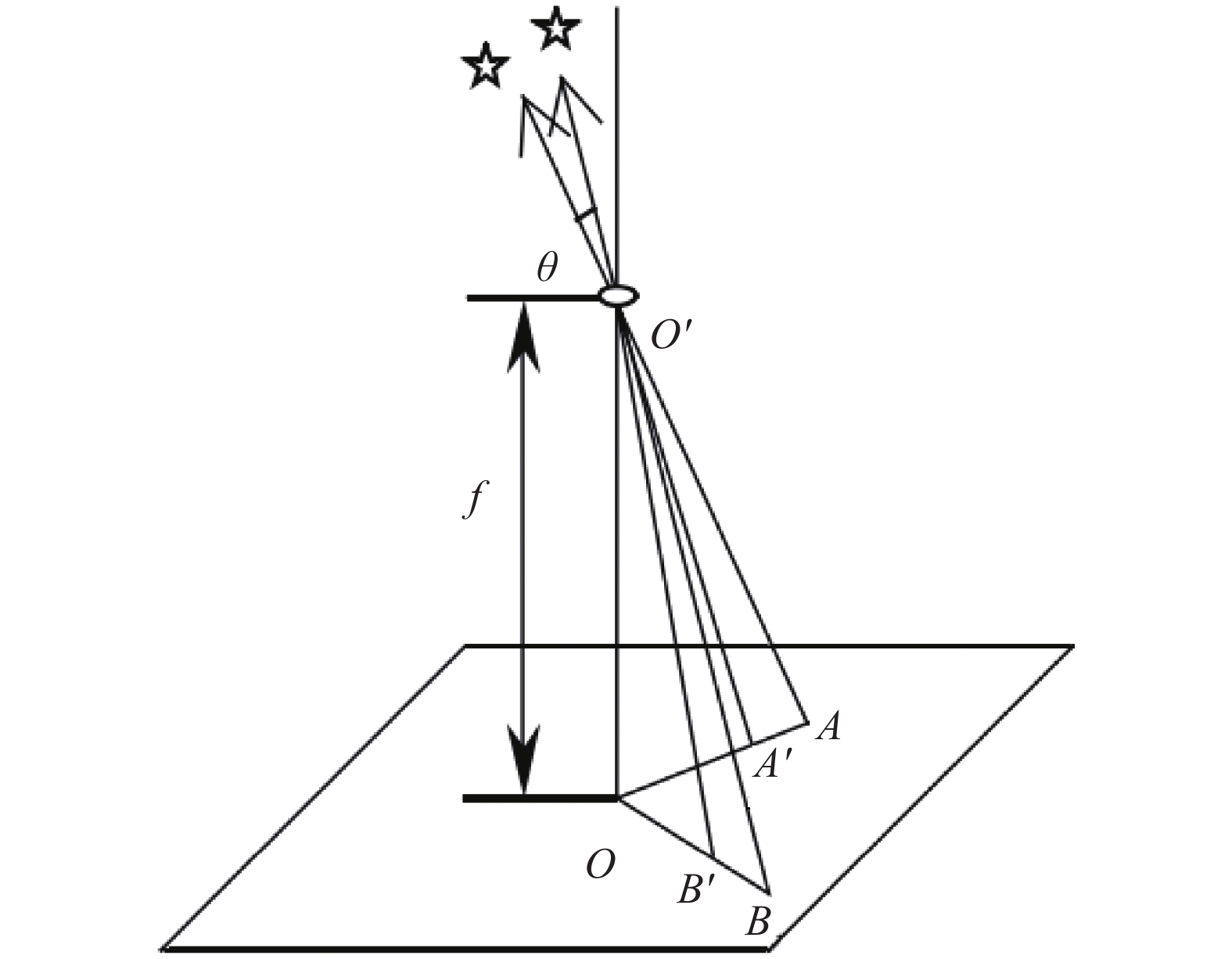
图1为星敏感器成像模型,其中,
$ O' $ 为镜头中心,$ O $ 为主点,镜头到探测器面的距离为焦距$ f $ 。根据小孔成像原理,主光轴$ OO' $ 垂直于探测器面。星点在探测器上成像,主要受光学镜头畸变与主点偏移的影响,$ A $ 、$ B $ 点为星点在靶面上的理想成像位置,$ A' $ 、$ B' $ 点为发生径向畸变后的位置。两颗恒星之间的夹角$ \theta $ 为星内角,设($ {x_0} $ ,$ {y_0} $ )为主点位置,($ {x_i} $ ,$ {y_i} $ )为星场内第$ i $ 颗星在焦平面上的坐标,$ \overrightarrow {{v_i}} $ 为第$ i $ 颗星的恒星方向矢量,$ k $ 为畸变系数,$ a $ 、$ b $ ,$ c $ 为姿态矩阵参数[13-14]。
Figure 1. Imaging model of the star sensor
星敏感器理想成像模型公式为:
式中:
$ {f_n} = \dfrac{{ - f}}{{{a_3}{{\bar x}_i} + {b_3}{{\bar y}_i} + {c_3}{{\bar z}_i}}} $ 。星敏感器含有畸变的成像模型公式为:
式中:
$ {f_n}' = \dfrac{{ - f(1 + k{r^2})}}{{{a_3}{{\bar x}_i} + {b_3}{{\bar y}_i} + {c_3}{{\bar z}_i}}} $ ,$ {r^2} = {({x_i} - {x_0})^2} + {({y_i} - {y_0})^2} $ 。 -
设有恒星
$ A $ 、$ B $ ,其赤经、赤纬坐标分别$ \left( {{\alpha _A},{\beta _A}} \right) $ 和$ \left( {{\alpha _B},{\beta _B}} \right) $ ,则其在天球坐标系下的星对角距定义为:式中:
$ \overrightarrow {{v_A}} = \left[ {\begin{array}{*{20}{c}} {\cos {\alpha _A}\cos {\beta _A}} \\ {\sin {\alpha _A}\cos {\beta _A}} \\ {\sin {\beta _A}} \end{array}} \right] $ ,$ \overrightarrow {{v_B}} = \left[ {\begin{array}{*{20}{c}} {\cos {\alpha _B}\cos {\beta _B}} \\ {\sin {\alpha _B}\cos {\beta _B}} \\ {\sin {\beta _B}} \end{array}} \right] $ 分别为恒星A和恒星B的恒星方向矢量。在轨使用或地面观星试验时,星敏感器探测器拍摄视场范围内的恒星,图像经过数字信号电路处理后得到星点的位置信息,再与导航星库中的恒星进行匹配识别。利用导航星库中恒星星间角距作为姿态基准,计算测量误差。
该方法的具体步骤如下:
(1)计算任意两颗定姿星的星间角距误差。
设某一帧星敏感器探测到的恒星数量为N,任选两个定姿星
$ i $ 和$ j $ ,利用$ i $ 和$ j $ 在探测器上的坐标位置$\left( {{x_i},{{{y}}_i}} \right)$ 、$\left( {{x_j},{{{y}}_j}} \right)$ 计算星对角距测量值$ {\theta }_{测} $ 。利用$ i $ 和$ j $ 在星库中的赤经、赤纬位置$ \left( {{\alpha _i},{\beta _i}} \right) $ 、$ \left( {{\alpha _j},{\beta _j}} \right) $ 计算星对角距参考值$ {\theta }_{参} $ 。测量值与参考值做差,可得$ i $ 和$ j $ 的星间角距误差:(2)计算当前帧的星间角距误差。
当一帧图像中有N颗探测星时,可得到
$ {\dfrac{N(N-1)}{2}} $ 组星对角距误差。星对角距误差符合随机分布特性,该误差99.7%在3倍标准差之内,取其3倍标准差可得到这一帧的星对角距误差:(3)统计星敏感器星间角距误差。
统计
$ n $ 帧的星间角距误差,$ n > 10\;000 $ 。取其平均值作为星敏感器的星间角距误差的统计值:(4)通过分解星敏感器星间角距误差得到产品姿态轴误差。
-
在计算星对角距的参考值时,导航星一般使用恒星在ICRS (国际天球参考架)下的球面坐标(J2000.0)。为保证参考值计算的精确性,需要首先对导航星的星矢量坐标进行预处理,消除恒星自行的影响。
恒星自行是单位时间内恒星位移在在天球切面上的投影对于星敏感器所张的角度,是恒星运动在惯性测量系下产生的位置变化,可分解为赤经自行与赤纬自行。恒星自行仅与星敏感器输出姿态时的时刻有关,与姿态计算时所面向的天区无关[15]。依据参考文献[16]的修正方法修正恒星相对于J2000.0平赤道坐标系的运动变化,计算出修正自行差后的恒星方向矢量,进行导航星间星对角距的计算,可得出一个更准确的星对角距参考值。
-
星对角距测量值基于星敏感器输出的探测星坐标进行计算。设恒星
$ i $ 在探测器上的质心坐标为$\left( {{x_i},{{{y}}_i}} \right)$ ,根据公式(7)换算为恒星方向矢量$ \overrightarrow {{v_i}} $ :式中:
$\left( {{x_0},{{{y}}_0}} \right)$ 为主点位置;$ f $ 为被测星敏感器焦距;$ {r_i} = \sqrt {{{({x_i} - {x_0})}^2} + {{({y_i} - {y_0})}^2} + {f^2}} $ 。利用两颗探测星换算出的恒星方向矢量计算出星对角距的测量值
$ {\theta }_{测} $ :需要注意的是,以上星对角距测量值计算基于第1节中的理想成像模式,在实际计算中,还应修正光学镜头畸变与主点偏移,从而计算得出精确的星对角距测量值[17]。
-
利用公式(6)计算出了星敏感器星间角距误差的统计值。以下分解该统计值,推导得到星敏感器姿态轴误差。
两颗探测星的星间角距误差由两颗定姿星误差合成得到,当样本数足够多时,每颗探测星参与误差合成的贡献度趋于相等。故星敏感器单星的平均定位误差为:
该误差由单星在探测器上X方向误差与Y方向误差合成得到:
由第1节中星敏感器成像的理想模型,探测器X轴与Y轴的角分辨率(视场/像素数)相同,则星点在X轴与Y轴上的定位误差相等。即使引入畸变误差与主点误差,两者近似相等,则:
美国休斯公司在参考文献[18-19]中给出了星敏感器星点提取误差与姿态轴误差的经验公式,星敏感器单星误差呈正态随机分布,实际使用时,星敏感器同时使用多颗星点进行姿态计算,星敏感器测量精度随着使用的星数
$ N $ 的平方根增加而提高:式中:
$ {\sigma }_{姿态轴} $ 为星敏感器姿态轴误差,表征了星敏感器精度;$ {\sigma }_{星} $ 为平均单星定位误差(探测器X方向或Y方向);N为参与计算的定姿星数,在计算时取测试时间段定姿星数的平均值。由公式(12)可知,星敏感器精度与平均单星定位误差成正比,与产品定姿星数的平方根成反比。结合公式(9)~(12),则星敏感器姿态精度可由下式计算:
-
以下从两个部分验证文中提出算法:第一部分利用在轨数据验证低角速率条件下文中提出的数据分析方法与现有方法的等价性;第二部分利用地面观星数据,验证文中精度评价方法在大动态条件下的适用性。
-
星敏感器工作在低动态条件下,一般使用滑动窗口法进行精度分析[20]。滑动窗口法计算测量精度的原理是:在预设宽度的滑动窗口内,基于实测的四元数以多阶多项式拟合参考四元数,以此作为基准计算误差。所以滑动窗口法计算出的测量精度是内符合精度,在估计精度基准时,无法剥离卫星或测试平台引入的误差。当卫星在轨进行大动态机动或地面观星使用转台转动星敏感器时,引入误差比星敏感器误差高一个量级,使用滑动窗口法无法评估星敏感器在大动态条件下的精度。
使用文中方法与滑动窗口法对同一段在轨数据进行分析,比对分析结果,论证文中方法与滑动窗口法的一致性。
风云三号卫星于2019年发射,在轨使用了两台CCD (电荷耦合器件)型星敏感器,以下称星敏感器A和星敏感器B。该卫星为太阳同步轨道,星敏感器动态为0.06 (°)/s。选取星敏感器A、星敏感器B在轨数据,分别使用文中方法与滑动窗口法进行分析。
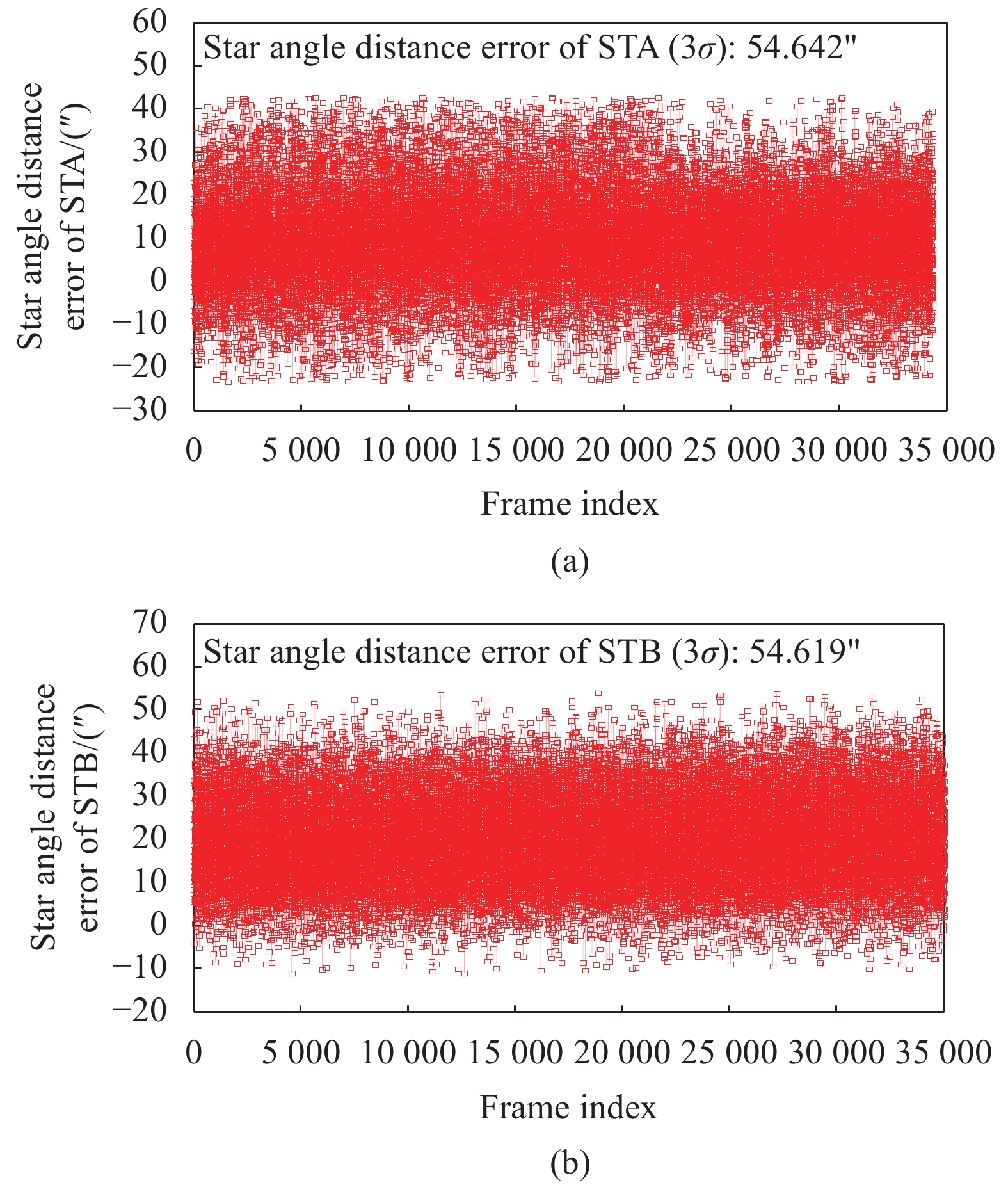
文中方法分析结果如图2所示,滑动窗口法分析结果如图3所示。两种方法分析结果如表1所示。

Figure 2. Star angle distance error curves of STA (a) & STB (b) (Using the algorithm of this paper)

Figure 3. STA (a) & STB (b) three axis attitude error based on sliding window calculation
由表1可知,面对在轨产品,数据两种方法计算的精度相当,且同时反映出星敏感器A精度略好于星敏感器B,验证了星对角距法的正确性。在分析在轨数据时,使用星对角距法与滑动窗口法等价。
Product
numberDynamic conditions Star angle distance calculation Sliding window calculation Star angle distance error Mean of determination star Single-axis error X-axis error Y-axis error STA 0.06 (°)/s 54.642" 17 6.62" 5.996" 6.704" STB 0.06 (°)/s 54.619" 16 6.82" 5.975" 7.297" Table 1. Error comparison table of two methods (on orbit)
-
在地面使用两型三台星敏感器进行算法验证,以下称星敏感器1、星敏感器2、星敏感器3。星敏感器1、星敏感器2使用同一型产品,采用CCD型探测器,地速条件下精度指标为5",动态性能指标为1 (°)/s;星敏感器3为APS(Active Pixel Sensor)型星敏感器,地速条件下精度指标为3",动态性能指标2 (°)/s。
试验系统如图4所示,利用地面观星试验时星敏感器1、星敏感器2、星敏感器3同一时间段的数据,从同类型产品大动态精度对比与不同类型产品大动态精度对比两方面论证文中方法对大动态条件下星敏感器精度评价的适用性。

Figure 4. Test process diagram of ST3
-
星敏感器1、星敏感器3在夏季进行试验,星敏感器2在冬季进行试验。
试验采用了便携式单轴转台,将星敏感器与转台通过转接工装相连,设置转台按一定角速率进行转动,采集星敏感器星点数据包数据。试验过程如下:
(1)试验开始,转动转台至0°,持续10 min,采集星敏感器在地速下数据;
(2)转动转台至−40°,以1 (°)/s至40°,后转回−40°,来回三次,采集星敏感器在1 (°)/s动态下数据;
(3)转动转台以0.5 (°)/s至40°,后转回−40°,来回三次,采集星敏感器在0.5 (°)/s动态下数据;
(4)转动转台以0.2 (°)/s至40°,后转回−40°,来回两次,采集星敏感器在0.2 (°)/s动态下数据。
试验结束。
-
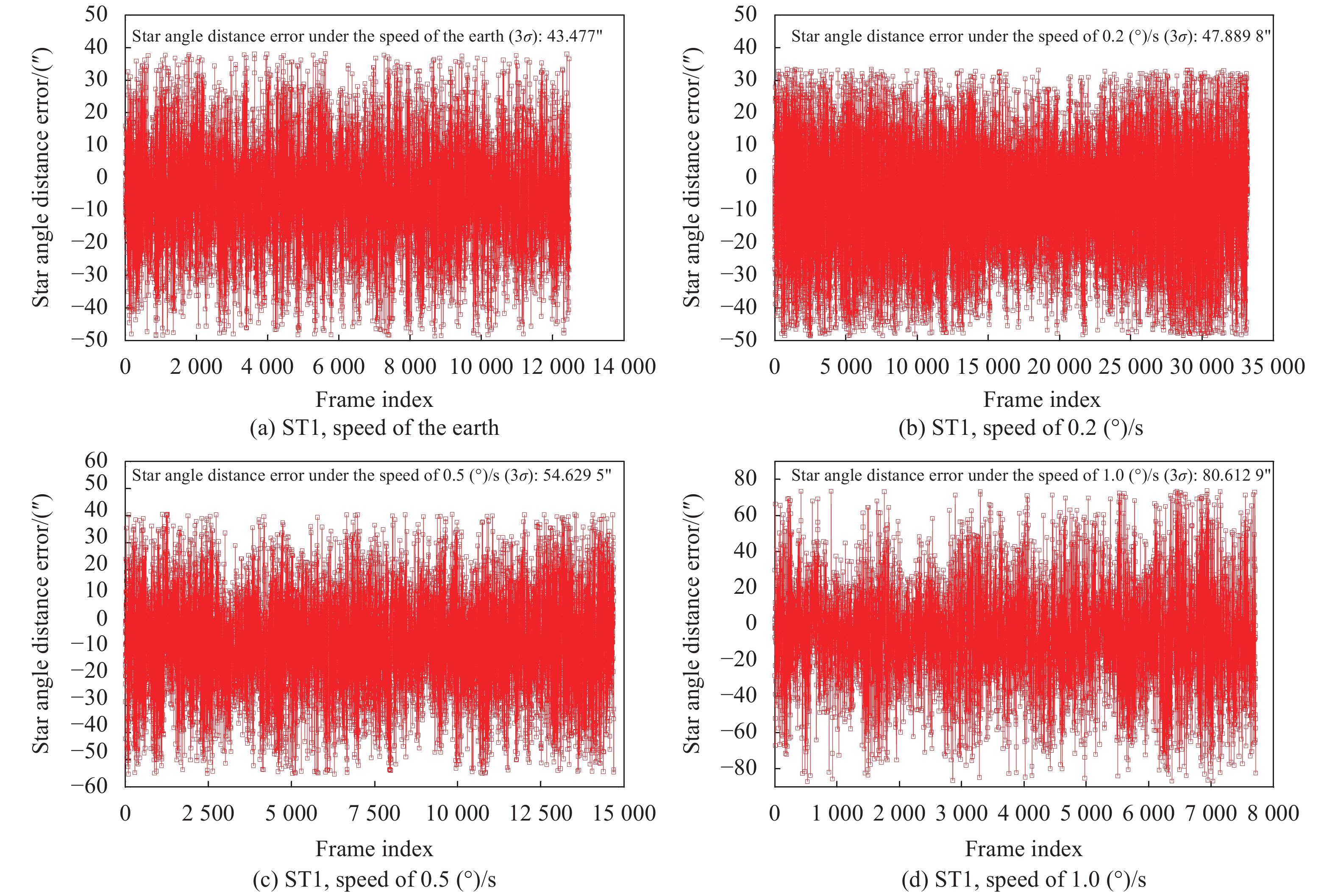
绘制星敏感器1在地速、动态0.2 (°)/s、动态0.5 (°)/s、 动态1 (°)/s下星对角距误差分析结果,如图5所示。
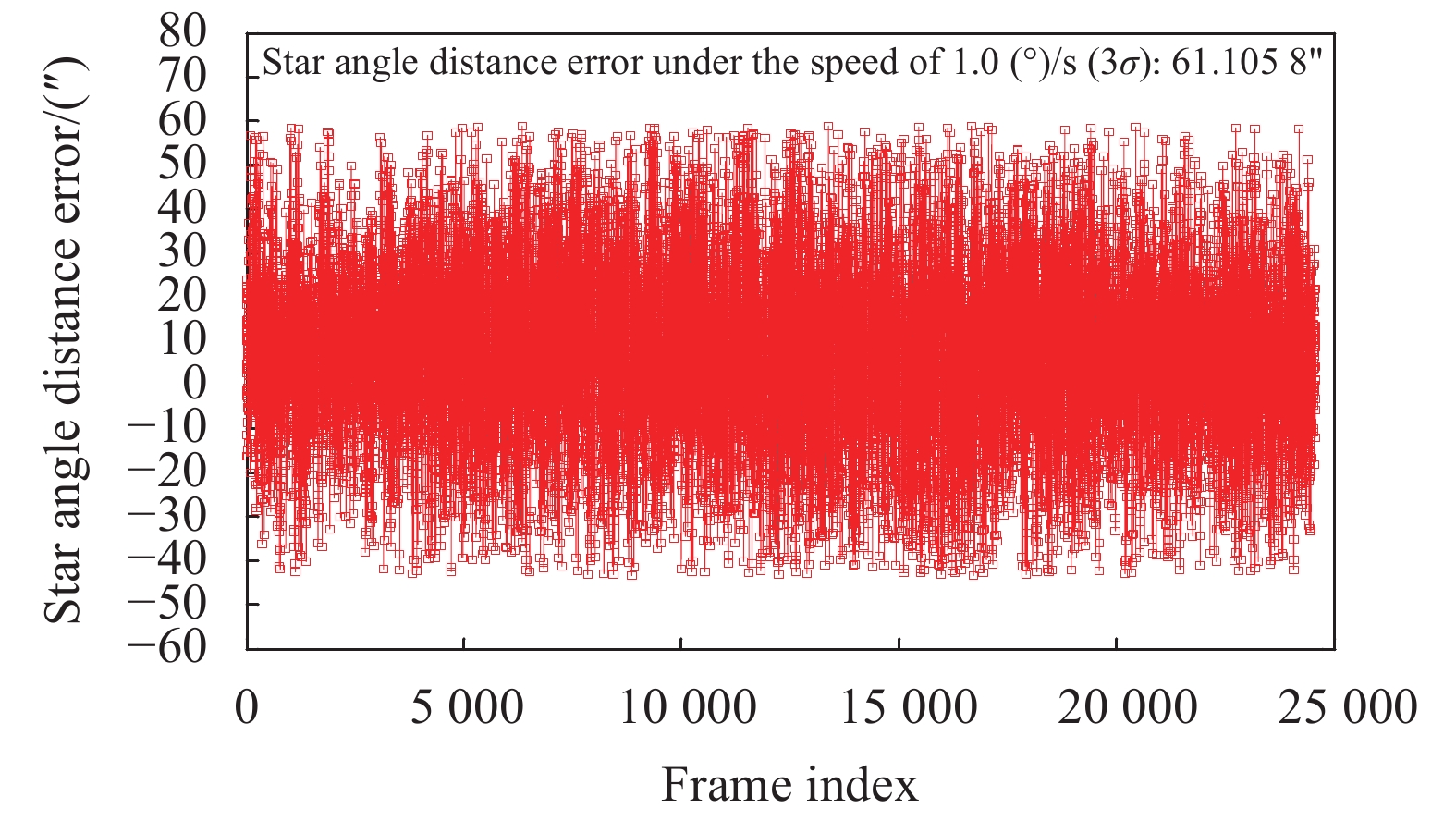
绘制星敏感器2在动态1 (°)/s下星对角距误差分析结果,如图6所示。

Figure 5. Star angle distance error curve of ST1 under different dynamic conditions
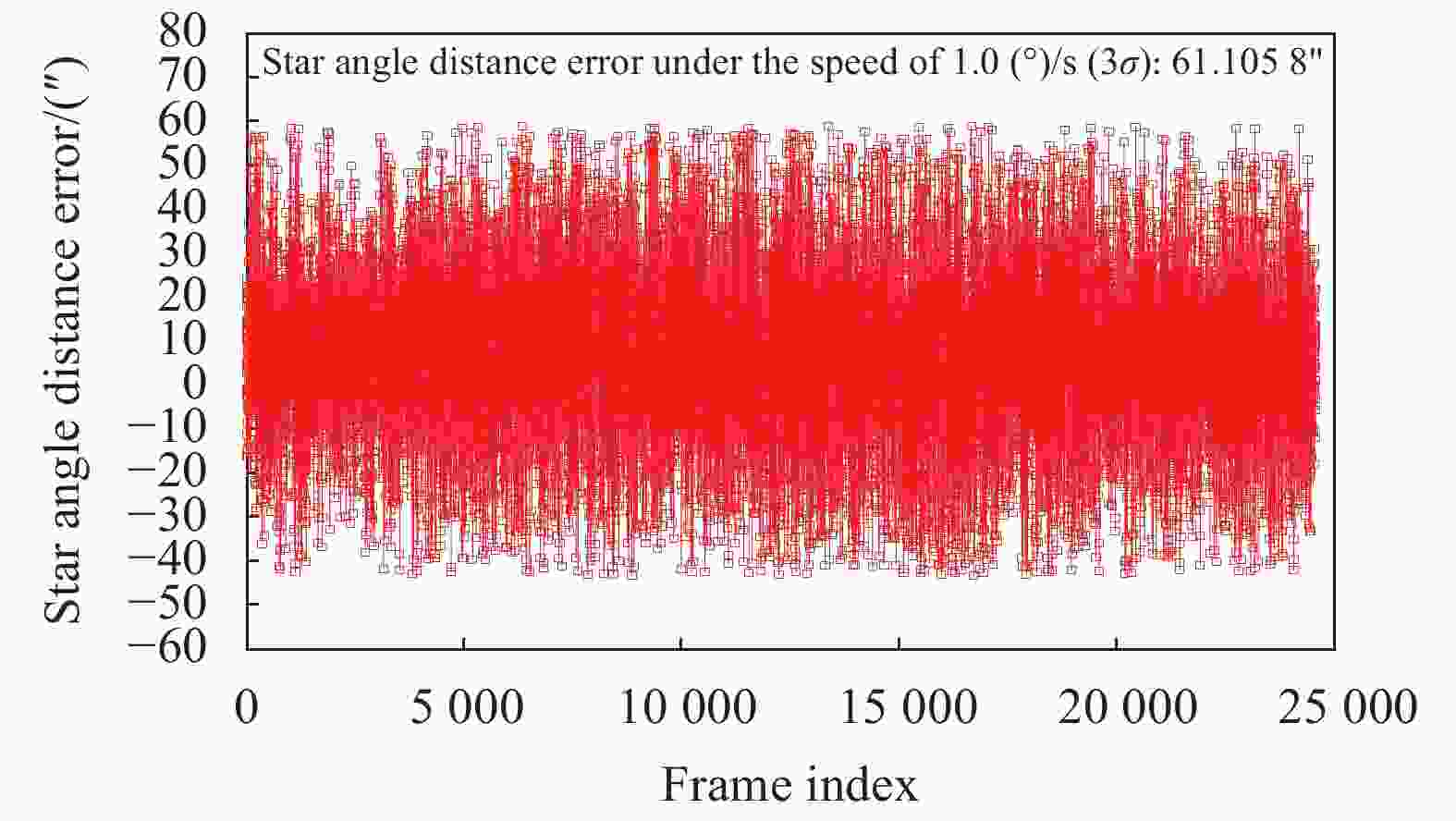
Figure 6. Star angle distance error curve of ST2 under 1 (°)/s angular velocity
由图5、图6可知,星敏感器产品精度随动态角速率变大,精度降低。为进一步分析其相关性,依据2.4节计算星敏感器测量精度,同时统计定姿星数变化,如表2所示。
Product number Dynamic conditions Star angle distance error Mean of determination star Single-axis error ST1 Earth's rotational rate 43.47" 16.05 5.42" 0.2 (°)/s 47.88" 15.76 6.03" 0.5 (°)/s 54.62" 15.58 6.91" 1 (°)/s 80.61" 15.71 10.16" Earth's rotational rate 39.06" 15.34 4.98" ST2 1 (°)/s 61.10" 9.09 10.13" Table 2. Dynamic error comparison table of CCD star sensors
对比星敏感器1和星敏感器2地速条件下与1 (°)/s角速率下数据,产品姿态角误差值相当,同一型号不同产品在相同角速率下表现一致。该结果一方面验证了被测CCD型星敏感器性能一致性高,另一方面验证了本精度评价方法对于大动态条件的适用性,在不同环境、不同天区指向的情况下,该方法可有效地计算出星敏感器动态条件下精度。
-
绘制星敏感器3在动态1 (°)/s、动态2 (°)/s下星对角距误差分析结果,如图7所示。

Figure 7. Star angle distance error curve of ST3 under different dynamic conditions
依据2.4节计算星敏感器测量精度,同时统计定姿星数变化,如表3所示。
Product number Dynamic conditions Star angle distance error Mean of determination star Single-axis error ST3 Earth's rotational rate 32.91" 17.35 3.95" 1 (°)/s 82.91" 15.41 10.56" 2 (°)/s 104.24" 10.2 16.32" Table 3. Dynamic error comparison table of APS star Sensor
根据表2与表3,对比CCD型星敏感器与星敏感器2地速下产品单轴精度,APS型星敏感器精度较高,符合两型产品静态精度指标;对比CCD型星敏感器与APS型星敏感器在1 (°)/s动态条件下产品单轴精度,两型产品精度相当,单轴精度约为10"。对于不同产品,使用文中所述的精度评价方法可准确地计算出动态条件下的精度。
-
由以上两部分的试验验证,文中方法成功计算出不同产品在各动态条件下的动态精度,通过不同工况、不同精度方法、同类型产品、不同类型产品的交叉对比,验证了文中精度评价方法在低速条件下与滑动窗口法的等价性及在大动态条件下的适用性。
-
文中针对现有精度评价方法无法有效计算星敏感器在大动态条件下的精度的问题,基于星敏感器成像模型与星对角距的不变性提出了一种星敏感器动态精度评价方法,分析了该方法的原理、星对角距的计算方法和统计误差的分解方法。通过文中方法与已有方法的在轨数据等价性分析和地面观星大动态精度评价,计算出某CCD型星敏感器在1 (°)/s条件下精度为10",某APS型星敏感器在2 (°)/s条件下精度为16",说明了该方法对于星敏感器在大动态条件下的精度评价是可信的,可同时应用于星敏感器地面观星测试与在轨数据分析。
Evaluation method of star sensor dynamic accuracy
doi: 10.3788/IRLA20210571
- Received Date: 2021-08-15
- Rev Recd Date: 2021-09-30
- Publish Date: 2022-04-07
Fund Project:
National Key Research and Development Program of China(2019YFA0706002)
-
Key words:
- star sensor /
- dynamic accuracy analysis /
- star angle distance error /
- on-orbit /
- dynamic capability
Abstract: Aiming at the problem that the existing accuracy evaluation methods can not effectively calculate the accuracy of star sensor under large dynamic conditions, a dynamic accuracy evaluation method was proposed based on the imaging model of star sensor and the invariance of star angle distance. The principle was clarified, and the calculation flow and statistical method were proposed. Based on the in-orbit data of FY satellite, the processing results of the proposed method and the traditional sliding window method were compared and the equivalence of the two methods under the same condition of small angular rate was analyzed, which verifying the feasibility of the proposed method. Based on the ground observation data, the measurement accuracy of two types of star sensors under different dynamic conditions was obtained. Compared with the existing dynamic accuracy evaluation methods, this method can effectively peel off the errors introduced by the test system, and more truly reflect the actual measurement accuracy of the star sensor under dynamic conditions.




























































 DownLoad:
DownLoad: