





HTML
-
激光雷达作为一种主动式探测技术,能够快速、准确地获取目标的空间三维信息,在自动驾驶、空间交会对接、目标识别等民用、航空航天以及军用领域有着广泛的用途[1-4]。 激光雷达的探测方式分为直接探测和相干探测,由于直接探测方式实现比较简单,可靠性高,所以,在大多数激光雷达系统中,都采用直接探测方式[5]。然而,直接探测方式适合强光探测,它需要接收的光信号大于噪声。由于激光雷达通常是在白天环境下进行工作,因此会受到强烈的太阳背景辐射噪声的影响,所以,有效的背景光抑制手段是提高激光雷达探测灵敏度的有效手段[6]。
目前,对于激光雷达的背景光抑制主要采用光谱滤波法,即使用窄带的干涉滤波片对回波信号进行光谱滤波,以达到背景光抑制的效果。但是,目前干涉滤波片的最小滤波带宽一般为0.5 nm,透过率为70%左右,效果仍然不够理想。需要寻求带宽更窄的滤波器件来提高激光雷达在背景光抑制上的性能。因此笔者配合使用极窄线宽的激光器和窄带宽的滤波器件。但是当二者都很窄时,激光器和滤波器的中心波长的匹配问题就显得尤为重要。在实际应用中,随着力、热等环境变化,激光器和滤波片中心波长都会产生一定的波长漂移,在极窄的光谱宽度下,这将导致激光雷达的接收信号信噪比显著降低。因此,需要设计一套窄带光学滤波下的激光雷达收发波长匹配系统,将雷达系统的接收滤波器件中心波长始终锁定在激光发射中心波长上,实现收发波长的实时匹配。对于波长匹配系统,主要有两种设计思路,一种是利用可调谐激光器调谐其波长去跟踪滤波器件中心波长的变化,另一种是用可调谐滤波器调谐滤波中心波长去跟踪发射激光的波长变化。而基于可调谐激光器的技术一般较为复杂,因此文中研究采用可调谐滤波器件的方案。
基于可调谐滤波器件的波长匹配系统要求在发射波长产生变化时,让接收滤波器件能够跟踪其波长的变化进而产生相应的调谐。为了达到雷达系统中窄带滤波的要求,滤波系统的带宽需要足够窄,从而达到对激光雷达背景辐射噪声的抑制效果。目前,可调谐滤波器的发展现状如表1所示。
从表1可以看出,体光栅无论在滤波光谱宽度还是中心波长的调谐范围上性能都相当出色。所以,文中提出了一种基于反射式体光栅的收发波长匹配跟踪系统,不仅具有极窄的滤波带宽,最低能达到20 pm,还能够实现激光雷达在窄滤波带宽时的收发波长匹配 [7-8],避免了受环境影响时接收滤波器与发射激光器之间因波长漂移产生失配而带来的影响,进一步提高了激光雷达,特别是夫琅禾费暗线激光雷达的背景光抑制能力与稳定可靠的工作性能,降低了后续激光雷达数据处理的复杂度。
Type Band width/nm Tuning range/nm Fiber Bragg grating 0.03-3 80 F-P filter <0.1 0.8-340 Mach-Zehnder filter <0.2 <4 AOTF >0.3 <500 VBG <0.1 >20 Table 1. Overview of tunable filter parameters
-
激光雷达在白天工作时,其背景噪声主要来自于太阳光的散射和目标对太阳光的反射。其背景光的功率可以表示为:
其中,
式中:
${T_r}$ 为接收光学系统的透过率;${T_a}$ 为大气或其他介质的单程透过率;$\theta _r^{}$ 为接收视场角;$d_r^{}$ 为光学系统的物镜直径;$\Delta \lambda $ 为滤光片的光谱带宽;${H_\lambda }$ 为太阳光对地面的光谱辐照度;${N_\lambda }$ 为大气散射的光谱辐射亮度;$\rho $ 为目标表面的光谱辐射系数;$\theta $ 为目标表面法线与太阳光线的夹角;$\varphi $ 为接收光轴与目标表面法线的夹角。从公式(1)可以看出,激光雷达系统使用的滤波片光谱带宽$\Delta \lambda $ 越小,相应的接收背景光功率越低,从而接收信号具有更高的信噪比[9]。 -
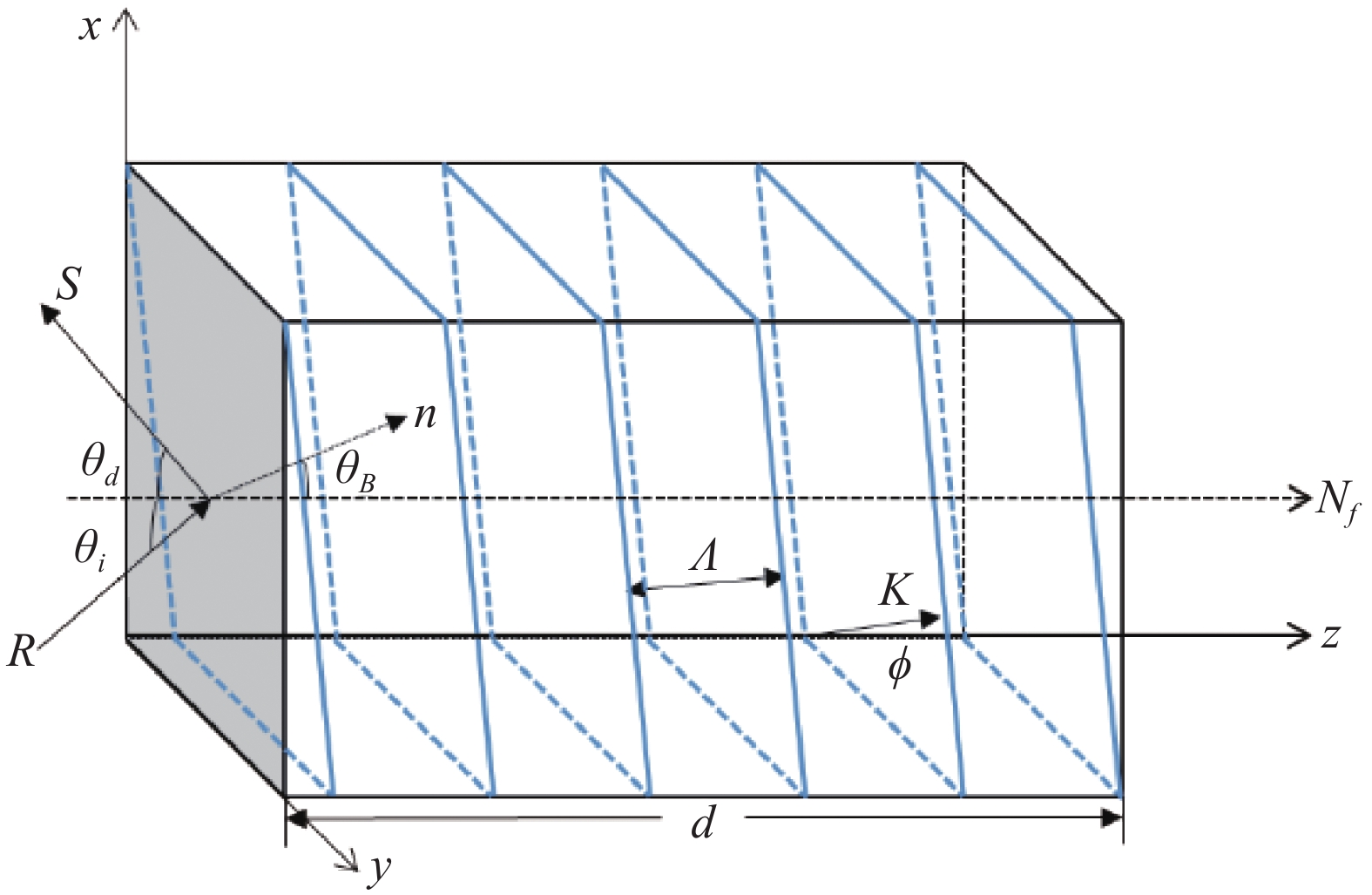
体光栅是一种介质折射率呈周期性分布的衍射光学元件,其性能主要由介质折射率
$n$ 、折射率调制度$\delta n$ 、光栅周期$\varLambda$ 、矢量倾斜角$\phi $ 、光栅厚度$d$ 这五个参数所决定[10-11],如图1 所示。由耦合波理论[12-13]可知,当入射光的波矢与衍射光的波矢以及体光栅的光栅矢量满足动量匹配关系时,衍射效率达到最强,此时,反射式体光栅的入射布拉格条件可以表示为[14]:
Figure 1. Diagram of reflecting VBG
式中:
$\phi $ 为光栅矢量的倾角;${\theta _B}$ 为波长${{\lambda }}$ 在光栅内部的布拉格角;${{\varLambda }}$ 为光栅周期;$n$ 为光栅的介质折射率。对于在小范围内变化的波长,其对应的介质折射率近似为不变,并且将${\theta _B}$ 用入射角${\theta _i}$ 表示。此时,上式可写为:从上式可以看出,对于不同的入射角,具有不同的衍射中心波长。由此,可以用分光元件通过设置不同的入射角度实现可调谐滤波[15]。
对公式(4) 取其一阶导数,可得到体光栅的角度变化分辨率与衍射中心波长分辨率的关系,如下式所示:
其中,
-
对于体布拉格光栅,具有一定波长的光束只发生一个特定角度的衍射,根据布拉格条件,它取决于光栅空间频率:
通常情况下,对于反射式体布拉格光栅,它的衍射效率可以由下式表示:
式中:参数
$\varPhi $ 与参数$ \xi $ 可以分别由下式表示:其中,
通常情况下,反射式体光栅的衍射效率可以达到95%以上,并且,其滤波带宽理论上可以达到20 pm,是一种性能极好的滤波器件。
-
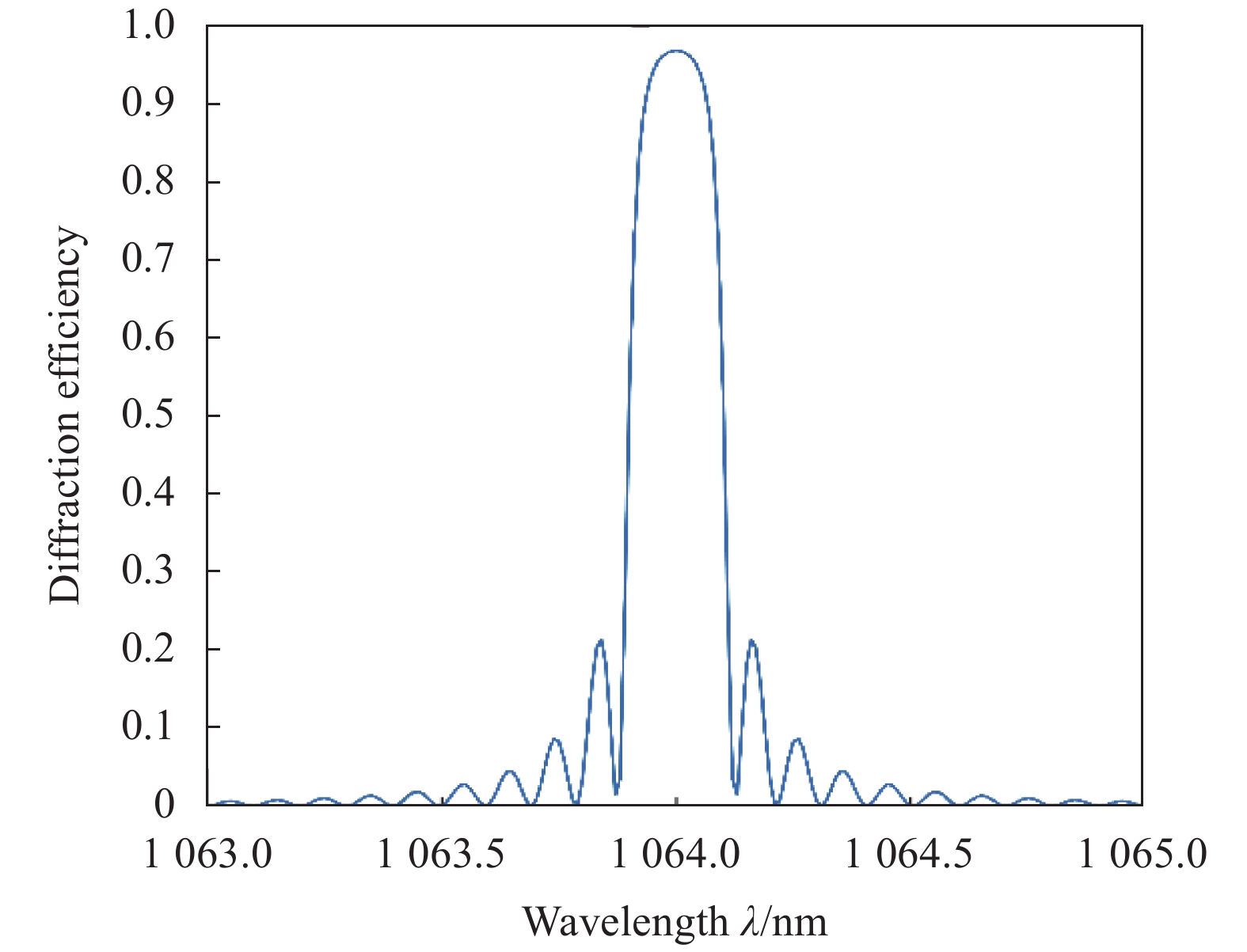
体光栅具有极窄的光谱滤波性能,理论上其滤波光谱带宽可达到20 pm。通过设计不同的设计参数,如折射率调制度、光栅周期、光栅矢量倾斜角等,可以获得不同的滤波性能,如图2所示。图2仿真所用的光栅参数是后续所定制的体光栅实物的参数,其折射率
$n$ 为1.488 5,折射率调制度$\delta n$ 为3×10−4,光栅倾角为0.550 2°,光栅厚度$d$ 为2.7 cm,中心波长${\lambda _0}$ 为1064 nm。
Figure 2. Volume grating filtering characteristics
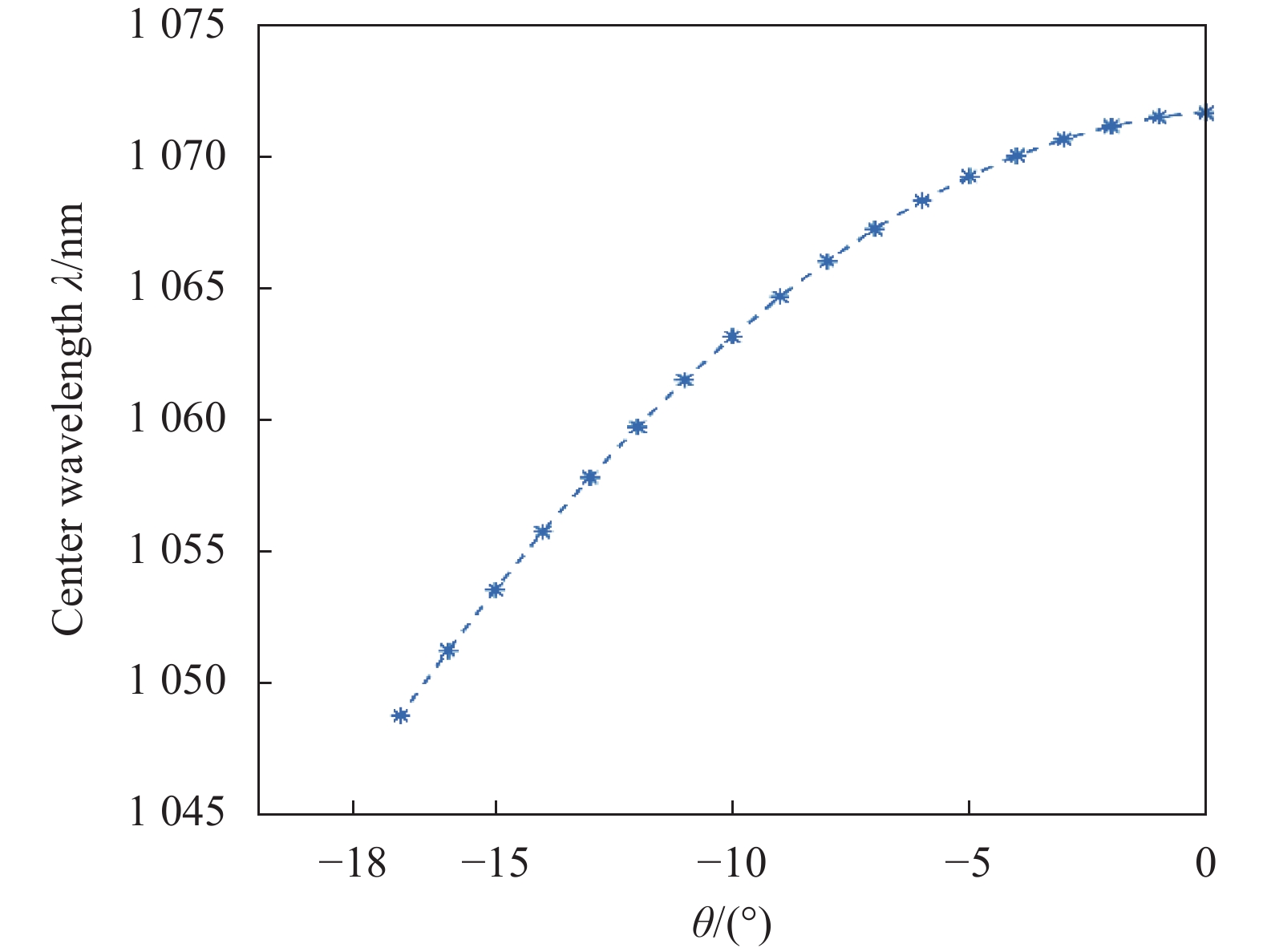
由图2可以看出,根据上述参数所设计体光栅的滤波带宽约为107 pm,并且其中心波长处的衍射效率大于95%。根据公式(3)与公式(4)所建立的体光栅可调谐滤波数学模型,利用上述体光栅参数,可以得出体光栅的角度特性曲线如图3所示。
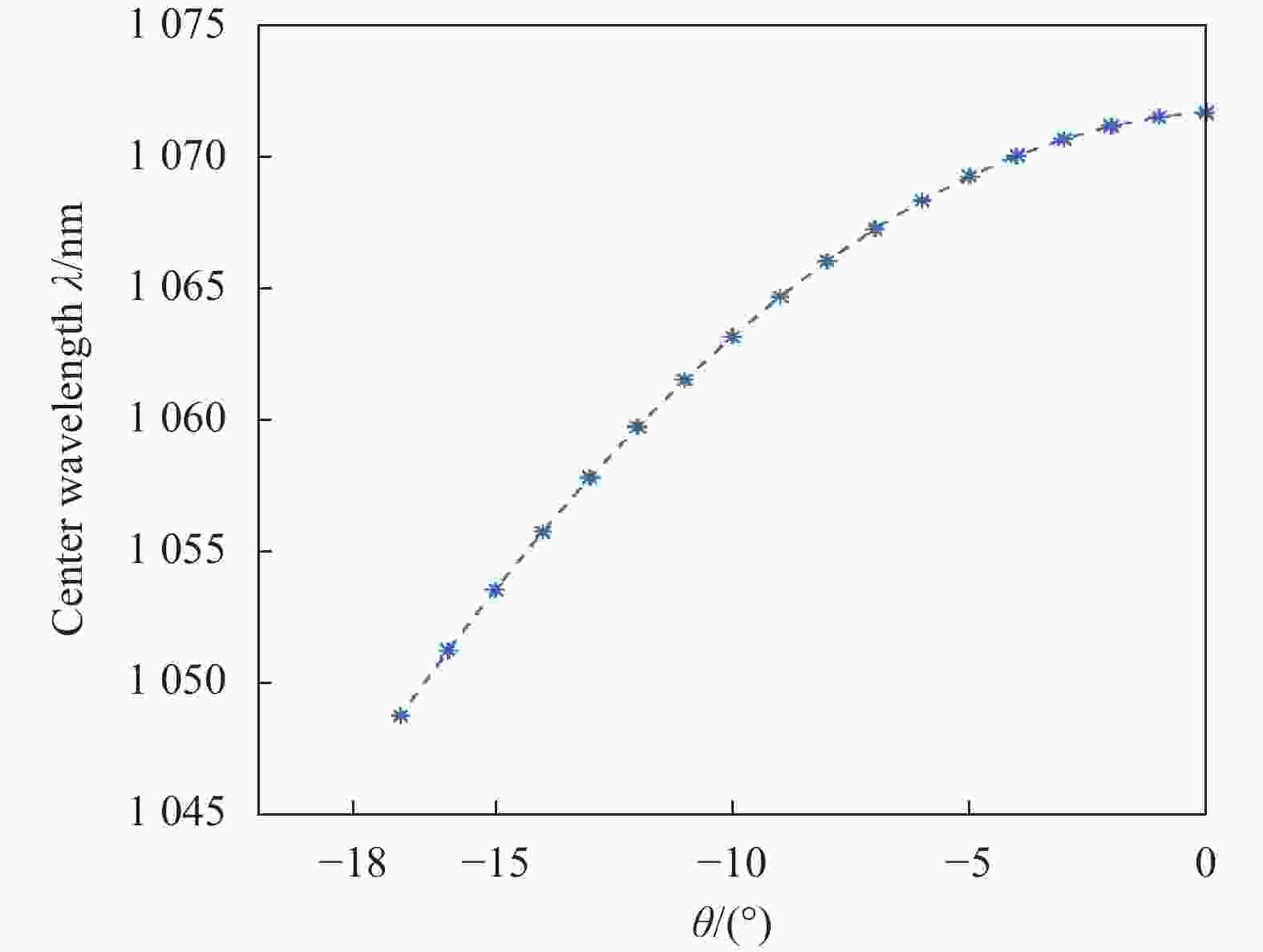
Figure 3. Volume grating angle characteristics
由图3可以看出,不同的入射光角度对应于不同的衍射中心波长。也就是说,如果使入射光角度由−17°~ 0 °变化,可以实现中心波长由1047~1071 nm的可调谐滤波。
-
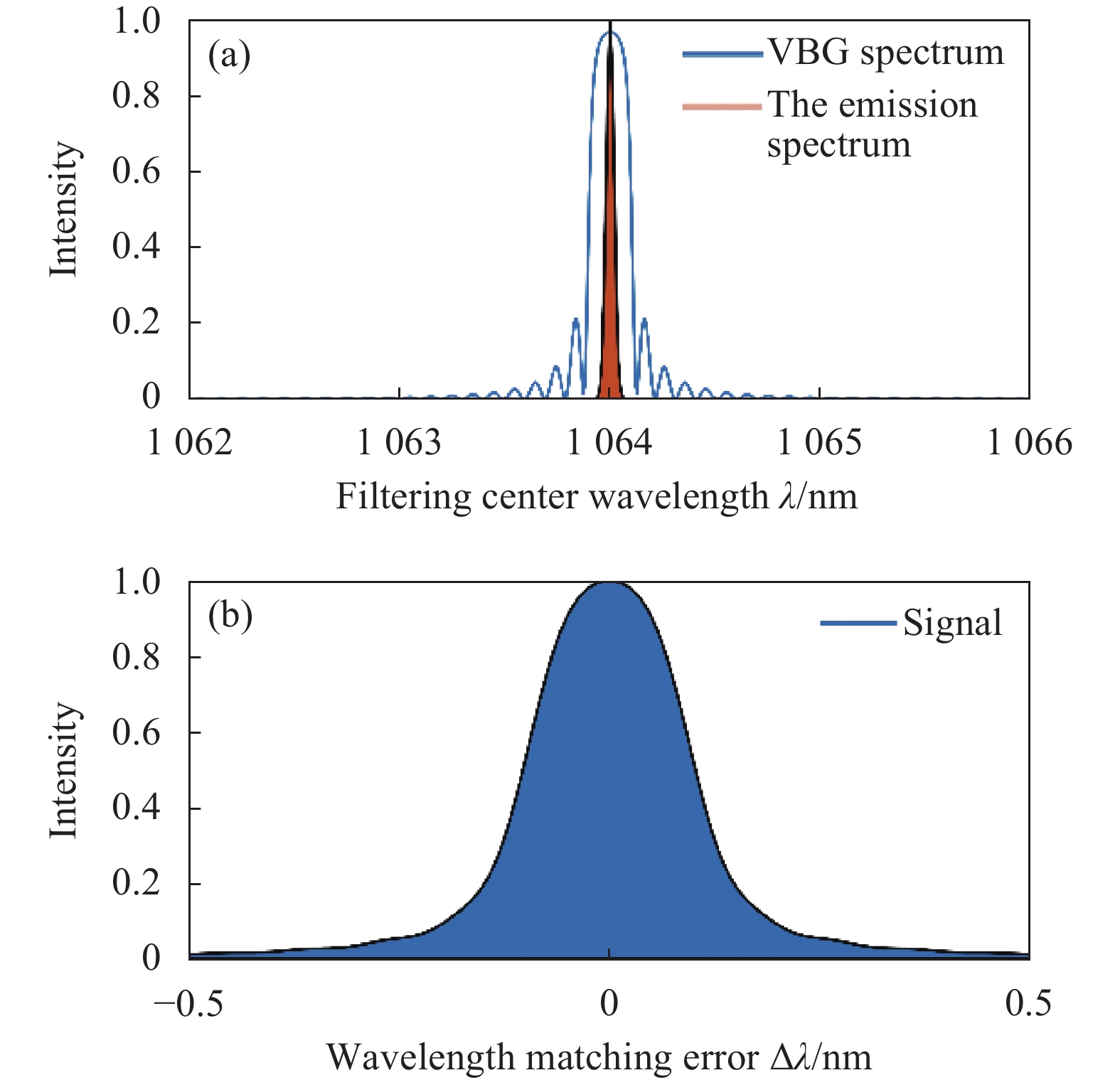
由上述分析可知,体光栅具有极窄的滤波特性,那么,当笔者使用同样的窄线宽的激光器时,二者的中心波长匹配显得尤为重要,一旦出现波长匹配误差,那么,接收信号的强度就会显著下降,如图4所示。

Figure 4. (a) The emission spectrum and VBG spectrum; (b) Simulation analysis of wavelength matching error
图4中,图(a)中的发射信号使用的是线宽为37 pm,中心波长为1064 nm的高斯光束,图(b)表示它们产生一定的中心波长匹配误差时接收信号的强度变化。从图中可以看出,当波长匹配误差大于35 pm时,接收信号强度下降为完全匹配的95%。因此,需要设计相应的波长跟踪系统,使得接收信号的中心波长能够对发射信号波长进行实时跟踪,保持二者中心波长的匹配性。
-
根据上述仿真所用的体光栅的设计参数,定制了一块中心波长为1 064nm的体光栅,其滤波带宽为107.9 pm。实验所测量的角度特性如图5、6所示。

Figure 5. Measurement of angular characteristics of 1 064 nm volume grating

Figure 6. Design of wavelength tracking system
从图5可以看出,根据参数所定制的体光栅的角度变化特性与理论仿真基本吻合。并且该光栅的前后两个表面具有相同的衍射角度特性。根据图5所示的光栅的特性,文中研究设计了相应的光路与控制系统,使其能够达到收发波长自动匹配跟踪的要求。
图6所示为波长跟踪系统的设计方案。利用体光栅的角度特性以及对称的空间结构特性,充分利用其两个工作面,将发射信号的一部分由分光棱镜及反射镜入射到其第一面,另一部分发射到目标物上,反射回波由激光雷达的光学接收器所接收,入射到体光栅的第二面。当这两束光完全平行时,他们在体光栅前后两个面上的入射角相同,旋转体光栅时,他们的入射角的变化情况也相同。由公式(4)和图5可知,他们具有相同的衍射角度特性,即发射信号光的衍射极大值点对应的入射光角度即为接收信号所对应的最佳入射角。通过测量发射信号光的衍射极大值点对应的角度,可以实现接收信号波长对发射信号波长的波长跟踪。
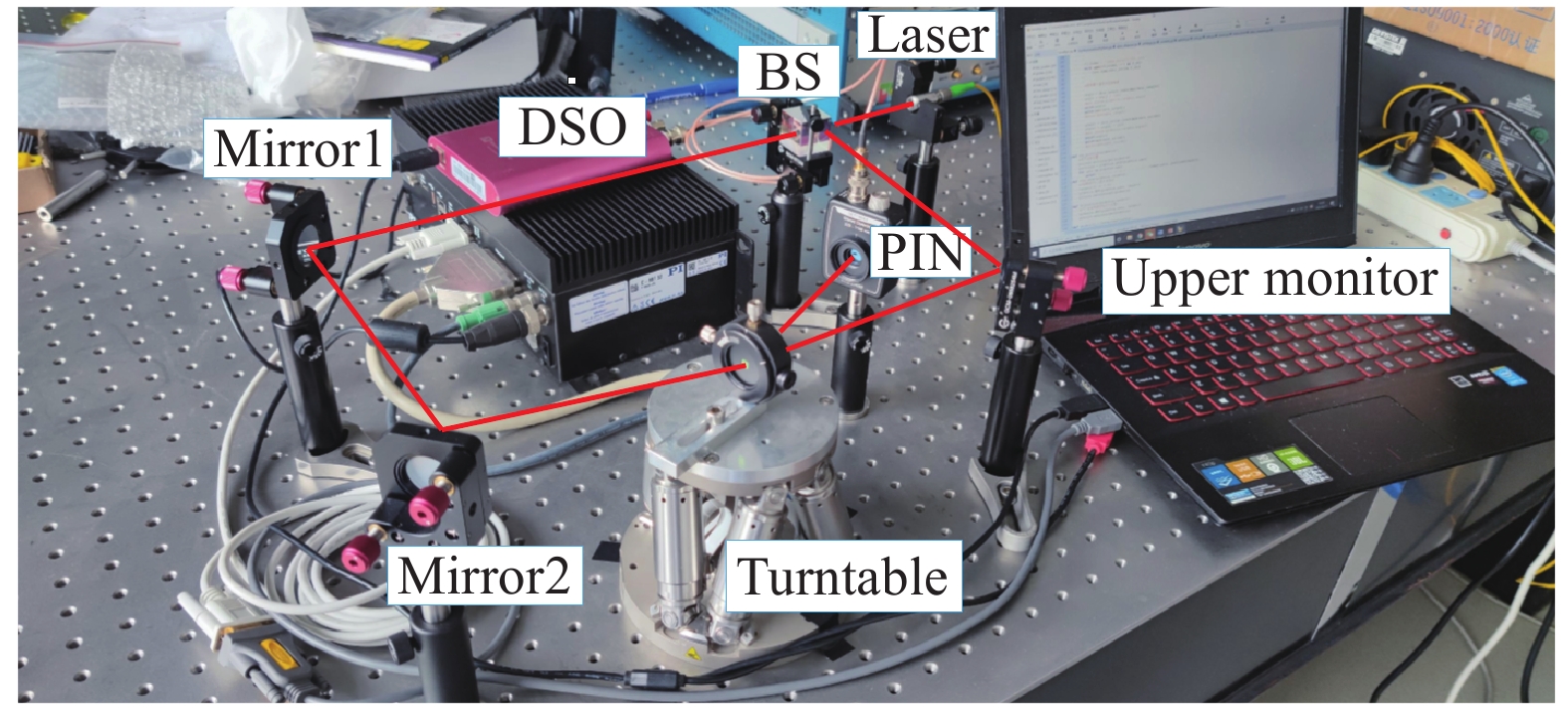
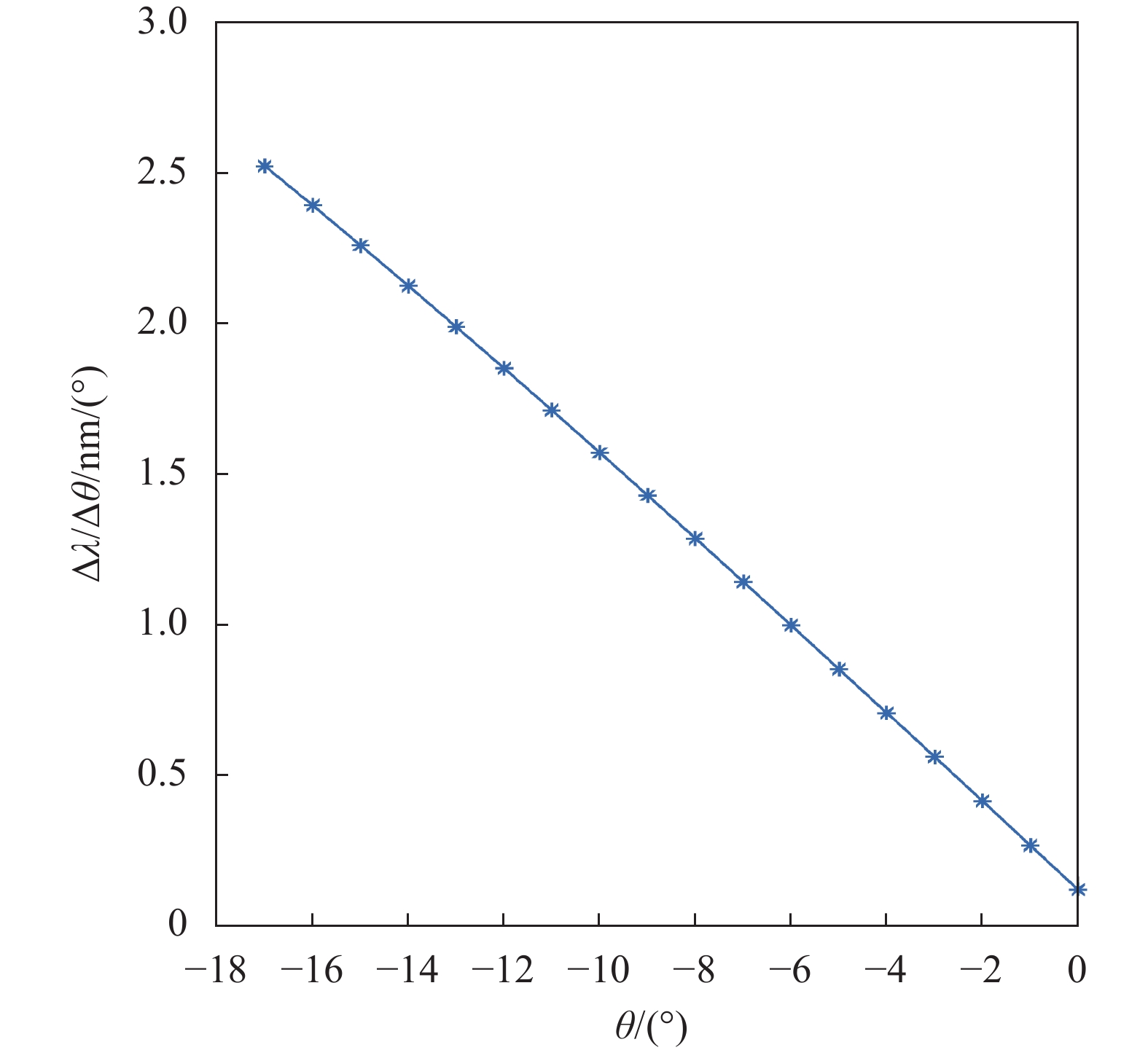
图7为对波长跟踪系统的实验验证实物图,图中未包括图6方案中的APD,因为实验主要探究利用体光栅设计激光雷达的收发波长匹配跟踪系统的原理,并未涉及后续对雷达信号的探测部分。利用反射镜当作目标物将回波反射到体光栅上,通过比较发射信号和接收信号在相同的扫描角度下的衍射强度变化来验证所设计的波长跟踪系统是否实现激光雷达收发波长跟踪的效果。实验中,所用的波长匹配的体光栅旋转台的角度分辨率为5 μrad,根据公式(5)可得出体光栅的角度旋转分辨率与其可调谐滤波时的波长分辨的关系,如图8所示。

Figure 7. Diagram of wavelength tracking system

Figure 8. Relationship between angular resolution and central wavelength resolution
当滤波中心波长为1064 nm时,在上图中所对应的角度为−9.447 °。从图中可以看出,角度分辨率为5 μrad即0.000 286°的体光栅旋转平台,所对应的衍射中心波长分辨率为0.43 pm,可以满足系统要求。根据图6在实验室搭建出实验光路,利用pin管作为信号接收。所使用的激光器为可调谐激光器,该可调谐激光器为光纤耦合激光器,在温度为25°时的中心波长为1064.4104 nm,对应的体光栅滤波角度为9.169°,通过改变晶体温度可以对波长做出微小改变(pm级)。所用激光器的光谱由YOKOGAWA公司的AQ6370D 光谱分析仪测量得到,线宽约为37 pm,发射功率为20 mW。
通过设定三个不同的晶体温度设定不同的激光发射波长,对于每个发射波长,利用体光栅旋转平台旋转两次相同角度进行角度扫描,利用反射式体光栅的角度特性,即在最佳滤波角度处其衍射效率最高,而透过率最低的特点,第一次记录发射光在体光栅一面上的透过率的变化,第二次记录接收光在体光栅二面上的透过率的变化。二者透过率的最低点的角度所对应的波长即为该透过光束的波长。能量的变化过程如图9所示。

Figure 9. Transmittance changes during volume grating angular scanning
由上图可以看出,利用体光栅旋转进行滤波中心波长的选择时,发射激光(入射到第一面)和接收光(入射到体光栅的第二面)具有相同的透过率(衍射效率)变化。利用此关系,对上述三个不同晶体温度下的发射激光波长进行波长匹配,实验结果如表2所示。
Number 1 2 3 Temperature/℃ Wavelength/nm Wavelength/nm Wavelength/nm 25 T 1064.4104 1064.4104 1064.4104 R 1064.4075 1064.4075 1064.4075 29 T 1064.3842 1064.3842 1064.3828 R 1064.3813 1064.3813 1064.3813 33 T 1064.3754 1064.3754 1064.3754 R 1064.3726 1064.3726 1064.3740 Table 2. Wavelength tracking of fixed wavelength
表2是在25°、29°、33°的晶体温度条件下的波长匹配结果,其中T表示发射的信号光,R表示接收光对应的滤波中心波长。从上表中可以看出,当两光线平行且分别入射到反射式体光栅的前后两个表面时,他们的衍射特性相同且其布拉格衍射角相同。从上表可以看出,在三个温度条件下,发射与接收信号的波长跟踪误差分别为2.9 pm、2.9 pm和2.8 pm。此时的接收信号大于二者波长完全匹配条件下的99.97%。因此,对于文中的基于体光栅的激光雷达收发波长跟踪系统,能够实现收发波长的匹配,并且匹配精度很高,实验中小于2.9 pm。如果能将入射光束和发射光束调整为完全平行,在5 μrad的角度扫描下,理论的波长跟踪误差将为0.43 pm。
-
3.1节通过理论仿真分析与实验研究,证明了所设计的激光雷达系统可以在固定波长条件下实现激光雷达的自动匹配。此节在图6实验方案的基础上,通过不断改变激光器晶体温度,测量接收滤波系统的跟踪能力,模拟激光器产生波长漂移时系统是否具备波长自动匹配的能力,即可调谐滤波器的中心波长是否与发射激光波长保持匹配。
匹配过程如下,首先以1064.4104 nm中心波长对应的角度为中心角度做一个大范围内的角度扫描,实验中的扫描角度为±0.05°,测量接收信号透过体光栅之后的信号能量,该能量最小时所对应的角度即为最佳滤波角度。然后重复进行±0.008°的小角度扫描,测量接收信号透过体光栅后的能量大小,寻找此刻的最佳滤波角度,并将此作为下一次扫描的中心角度。
实验中对可调谐激光器的晶体温度进行了从25.7°~33.7°,间隔为1°的温度调节,利用所设计的系统及扫描程序进行简单的扫描跟踪,并记录保存体光栅的最佳滤波角度的变化情况。利用公式(4)可得出下式:
利用公式(11)可将所测量的体光栅的最佳滤波角转换为对应的衍射中心波长,进而可直接比较发射光束与滤波器的中心波长,得出该波长跟踪系统的波长跟踪精度,如图10所示。
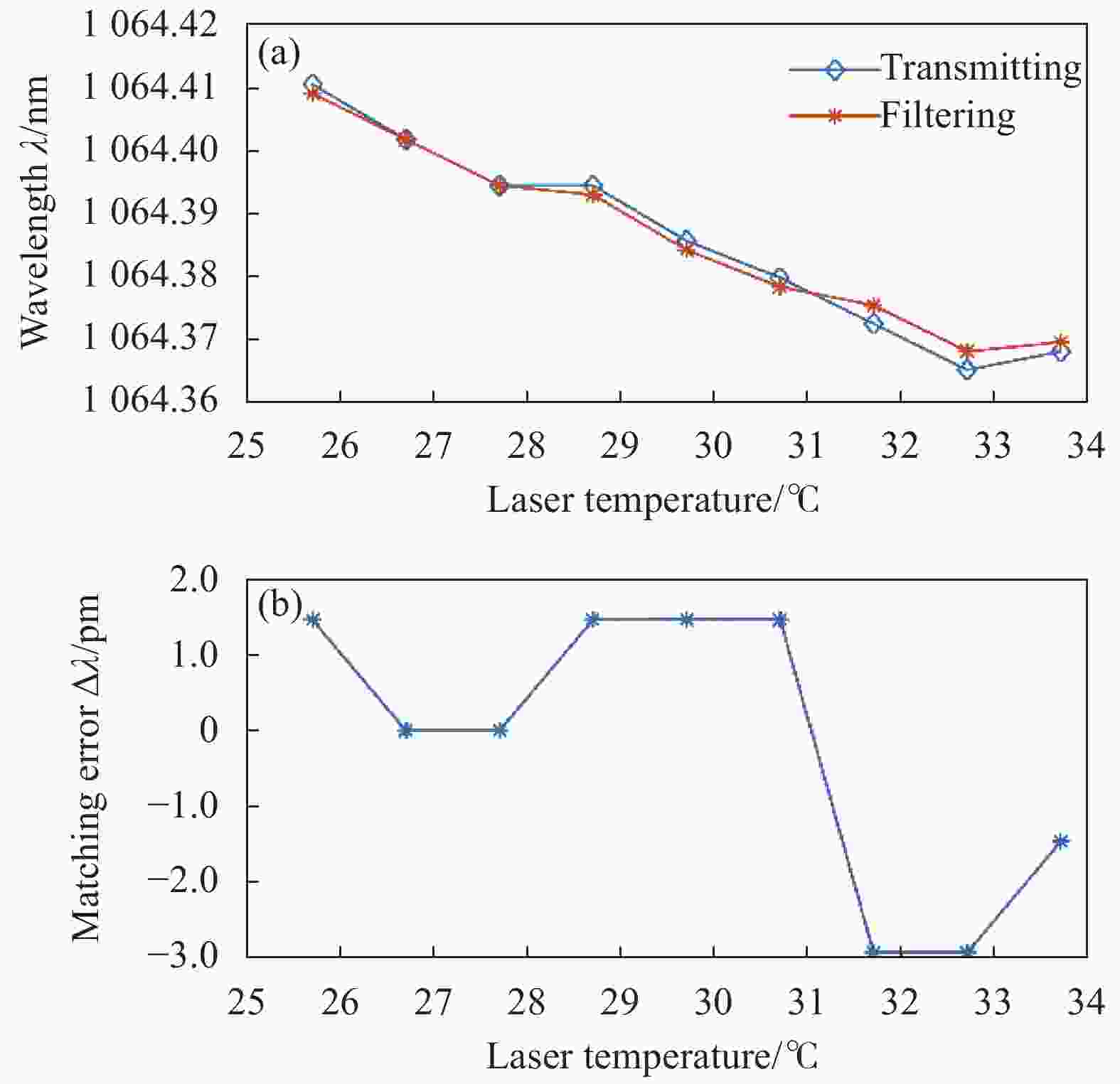
Figure 10. (a) Experimental results of wavelength matching tracking;(b) Analysis of wavelength matching error
上图表示可调谐激光器的晶体温度从25.7°~33.7°间隔1°变化时滤波器中心波长对发射波长的自动匹配跟踪。从图中可以看出,匹配的最大误差为2.9 pm。与上述固定波长下的匹配效果一致,说明所设计的系统经过相应的跟踪算法能够实现激光雷达的接收波长对发射波长的跟踪。
-
文中分析了体布拉格光栅的窄带滤波特性与角度选择特性,并据此特性设计了一个能够实现激光雷达收发波长自动匹配跟踪的系统。并且在实验室通过相应实验证明了该系统能够实现激光雷达接收波长对发射波长的自动跟踪,且其最大跟踪误差为2.9 pm,(5 μrad旋转台精度时理论可达到0.43 pm),此时的信号接收功率为最佳匹配下的99.97%。因此,所设计系统能够解决由于激光雷达系统中的激光器由于温度变化和抖动或干涉滤波片长时间工作等所带来的波长漂移问题,大大提高了激光雷达在长时间工作下的稳定性。并且利用体光栅在窄带滤波上的优势实现对太阳背景辐射的抑制,进一步提高了激光雷达的测距性能,降低其后续信号处理的复杂程度。


































 DownLoad:
DownLoad: