






-
在工业产品表面质量的视觉检测中,良好的光照效果能够保证视觉检测系统采集到高质量的图像,从而简化图像处理算法,提高测量系统可靠性与运行效率。因此针对视觉检测系统光源优化已成为机器视觉技术应用研究中的热点问题,且主要从发光二极管(Light Emitting Diode,LED)光源阵列的间隔优化与LED光源的空间位姿优化两方面展开。
在LED阵列的间隔优化方面,目前主要的研究为:固定LED的高度,在排布形式为直线、矩形,圆形、三角等形式时,以平面照度均匀度为评价标准,对LED阵列间距等结构参数[1-5]、LED阵列间距与功率的协同优化进行寻优[6-7]。得出阵列LED的平面照度均匀度优于单个LED,且三维优化所得照度效果优于二维优化所得照度效果。
在LED光源的空间位姿优化方面,目前主要的研究为:固定光源结构与LED间距,以平面照度均匀度为评价标准,对光源的空间位姿进行寻优。Hao等[8-9]对前置对称安装的矩形LED光源空间位姿进行了研究,以平面照度值的方差作为主要指标,建立优化目标函数,采用模拟退火算法对问题进行求解,得到光源的相对距离384 mm,高度为190 mm,安装倾角为136°时目标区域照度均匀度最优。考察均匀度在95%以上的区域,其面积误差在4%以内。但评价函数以保证平面照度的均方误差为主,未充分考虑被测面与背景面之间的区分度。Wang等[10]针对食品内层包装纸的缺陷特征,利用相关性分析法,依次确定照明光源类型、形状和角度,通过理论研究与实验验证,得出采用60°高角度的红外条形LED阵列照明,具有最佳的照度效果,其检测系统的缺陷识别率达99%。但优化过程没有考虑高度对照度效果的影响,故提出的光源优化方案具有一定的局限性。
为保证所提出平面照度优化方法的通用性和照度效果的优越性,文中采用标准条形LED阵列光源,以目标区域最优照度效果建立以LED光源空间位姿为参数的评价函数,对光源空间位姿参数进行寻优。
由于LED光源空间位姿寻优是一个高维优化问题,存在多个极值点,因此可引入群体智能优化算法对目标函数寻优。樽海鞘群算法是Mirjalili等[11]于2017年提出的一种模拟海洋中樽海鞘个体及群体行为的群智能优化算法。该生物种群个体首尾相连构成一条链,依次跟随移动,并形成领导者和追随者两部分。樽海鞘链由前端的领导者引导,后端的跟随者追随其先前的个体。Hussien[12]、Tubishat等[13]、Fan等[14]将樽海鞘算法、粒子群算法、鲸鱼算法等进行了比较,得出樽海鞘算法在处理多维优化时更具优越性。在樽海鞘算法改进方面,Hussien[12]、Mokeddem[15]指出樽海鞘算法在容易陷入局部最优、收敛速度慢等方面等方面仍有进一步提升的空间。针对樽海鞘算法容易陷入局部最优点等问题,Tubishat等[13]开发本地搜索算法以改进原始算法的寻优能力;Mokeddem[15]在目标的搜索上提出了混沌搜索的改进方法;Cai等[16]将带有随机扰动项的指数递减惯性权重引入到改进后的跟随者位置更新公式中,平衡了算法全局搜索和局部搜索能力;Bairathi等[17]提出了多重领导搜索方法,增强了原始算法的寻优能力;针对原始樽海鞘算法收敛较慢等问题,Hussien[12]引入反向学习机制来改进收敛曲线,并取得了不错的成果。目前樽海鞘算法已经用于求解护士排班和指派[18]、解决具有阀点效应的经济负载调度[19]、电能质量扰动分类的最优特征选择[20]、教育资源分配[21]等问题上。
集成电路芯片封装质量视觉检测是集成电路芯片封装测试过程中的重要环节,根据产品不同运输需求通常采用料盘上料或振动料斗上料等方式[22],其中料盘上料方式采用多只芯片同时检测的方式,相比具有更高的检测效率,但对视觉检测的光照效果也提出了更高的要求。文中针对料盘上料形式的方形扁平无引脚封装(Quad Flat No leads,QFN)芯片封装质量视觉检测环节,以
$ 50\;{\text{mm}} \times 50\;{{\rm{mm}}} $ 的方形料盘区域为例,提出具有一定通用性的机器视觉检测系统LED光源照度优化方法。在建立单个LED光源照度数学模型基础上,建立条形LED阵列光源照度数学模型,获取条形LED阵列在任意空间位姿与被测面(即目标区域)的照度值;基于照度均匀度、照度梯度变化与对中度、平均照度、目标与背景区分度等因素建立平面照度效果评价函数;提出改进樽海鞘算法,获取具有最优照度效果的空间位姿参数。最后,通过理论值与实验测量值的对比分析,验证该方法的有效性。 -
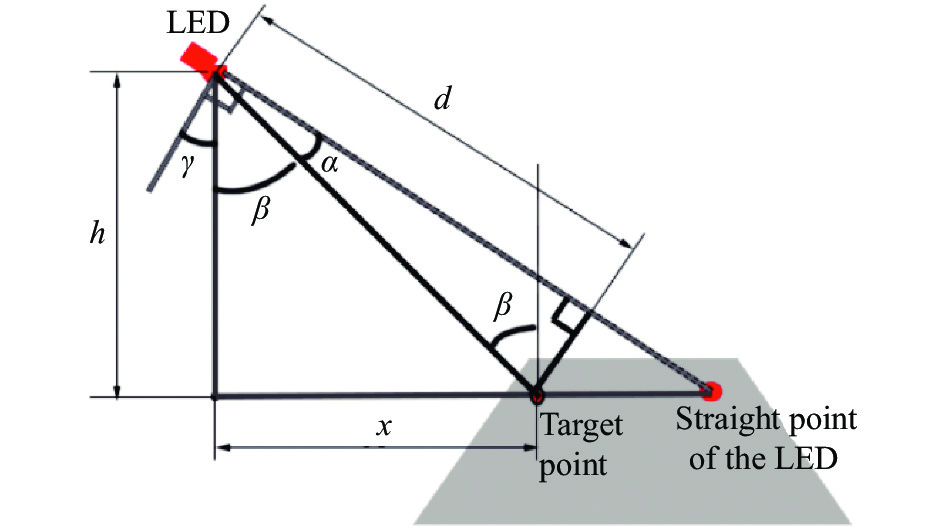
平面照度寻优方法中采用LED照明形式,其单个LED可以看作具有相同光通量的点光源,其照度分布由发光角的余弦量决定[8,23]:
式中:
$ {I_0} $ 为LED球面的平均发光强度;$ m $ 是与LED半衰角有关的参数,光源为理想朗伯体时取1,通常$ m $ 大于1,并由当前LED的半衰角$ {\theta _{1/2}} $ 确定;$ \alpha $ 为光线与光轴之间的夹角;$ \beta $ 为光线与被测平面法线之间夹角;$ d $ 为目标点到光源面之间距离。式中:
$ e(i,j) $ 为空间某一离散点$ (i,j) $ 的照度;$ d_k^{(i,j)} $ 为第k个光源所在平面与$ (i,j) $ ;点的距离,$ \alpha _k^{(i,j)} $ 为第k个光源法向量与第k个光源点到$ (i,j) $ 点的向量之间的夹角;$ \beta _k^{(i,j)} $ 为第k个光源点到$ (i,j) $ 点的向量与$ (i,j) $ 点所在平面法向量之间夹角。 -
为获取如公式(1)所示中单个LED的
$ {I_0} $ 和$ m $ ,文中提出如图1所示的实验测量方法。当光源与被测点处于同一水平位置时,可以通过测量参数$ x $ 、$ h $ 、$ \gamma $ 推导得出$ d $ 、$ \alpha $ 、$ \beta $ ,并记录当前参数下对应的照度值$ y $ 。其中$ x $ 为光源到目标点水平距离,$ h $ 为光源到目标点垂直距离,$ \gamma $ 为当前光源偏转的角度。则有如下几何关系: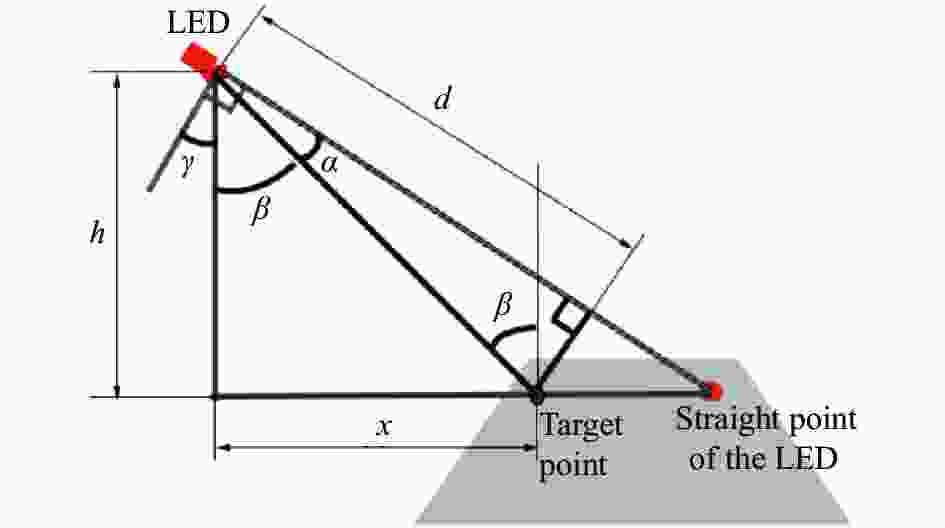
Figure 1. Schematic diagram of single LED light source mathematical model
根据公式(1),若将光源发出的光线假想为无数条截面无穷小的光柱,则可以将光柱发射距离与被测面截取光柱的面积的变化造成的照度衰减项记为
${Atte_2}$ ,将光线偏离光轴造成的照度衰减项记为${Atte_2}$ ,则有:对公式(1)两边取对数,得:
令
其中,y为列向量,A为2列向量构成的矩阵,则有:
对等式两边同乘以
${A^{\rm{T}}}$ :则
$ {I_0} $ 和$ m $ 相关表达式为:因此,平均球面发光强度
$ {I_0} $ 和系数$ m $ 可通过测量垂直距离$ d $ 、光线与光轴夹角$ \alpha $ 、光线与目标平面法向量夹角$ \beta $ 及实际照度值$ E $ 后计算得出。 -
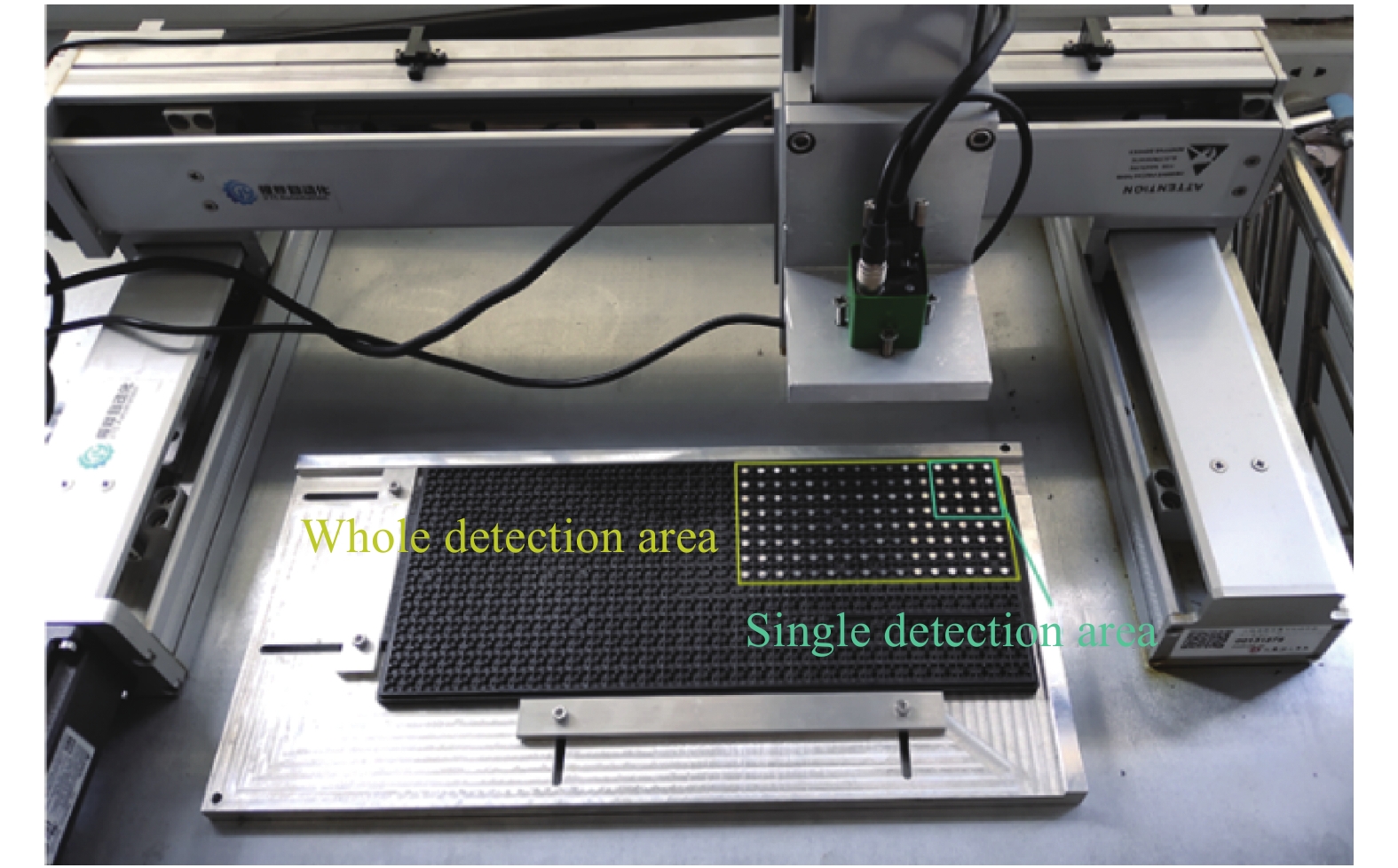
以芯片封装质量视觉检测为例,设置如图2所示
$ 50\;{{\rm{mm}}} \times 50\;{{\rm{mm}}} $ 方形优化区域,研究芯片表面照度效果最优条件下的光源空间位姿参数确定方法。该区域即为芯片封装质量检测实际场景中对应的光源照度优化范围,如图3所示的单次检测区域。该区域覆盖至多4行4列共计16只芯片,以实现一次成像同时完成至多16只芯片检测的目的。覆盖所有待测芯片的完整检测区域中,其余非重叠区域芯片的图像采集与检测可由相关运动机构协助完成。为便于料盘上料及机构间的传输运动,在光源支架与芯片料盘之间需设置一定的工作距离,文中将光源支架到方形优化区域中心的距离定为$ 250\;{{\rm{mm}}} $ 。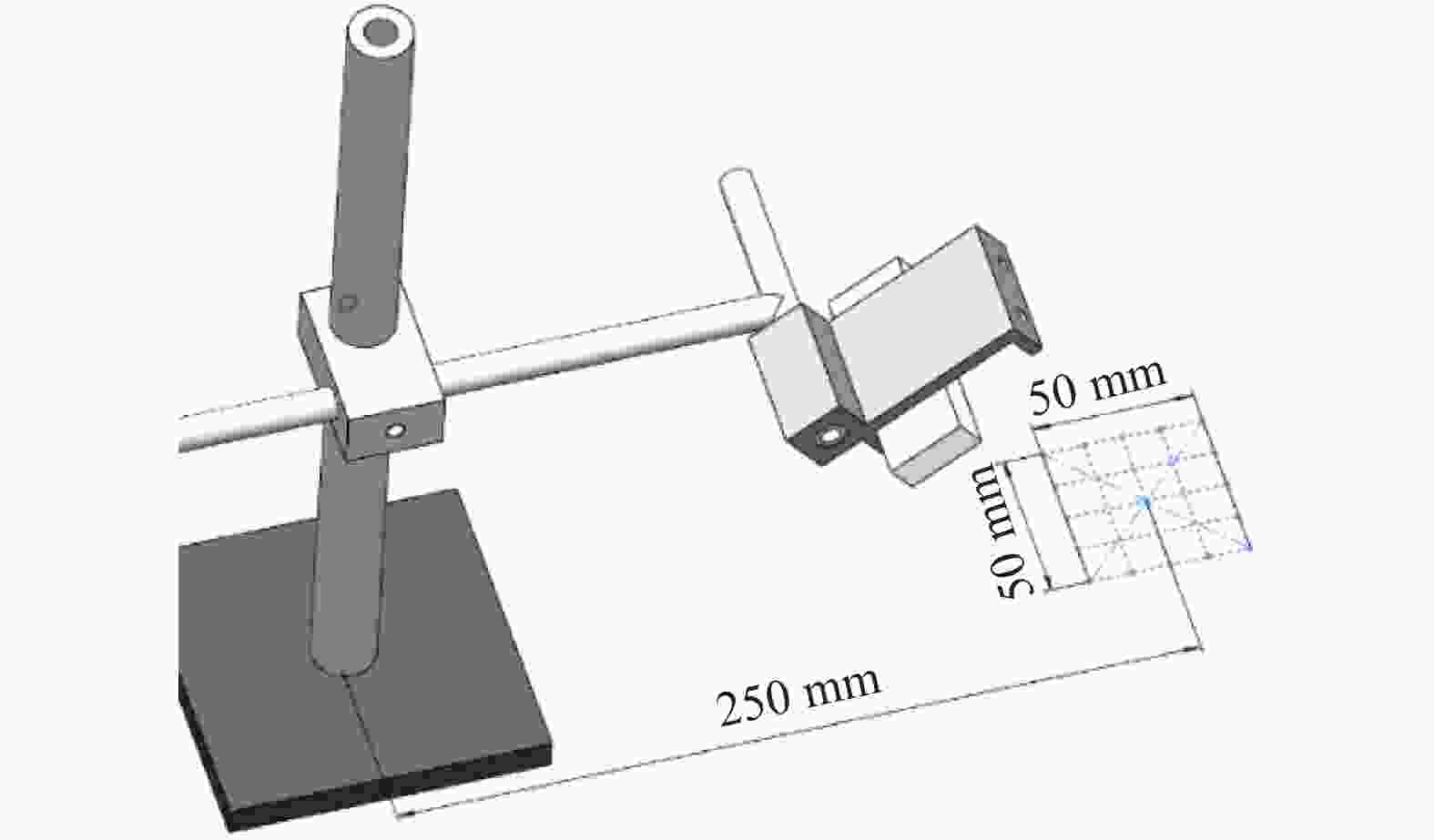
Figure 2. Schematic diagram of the position of the measured plane

Figure 3. Hardware environment of chip package quality inspection
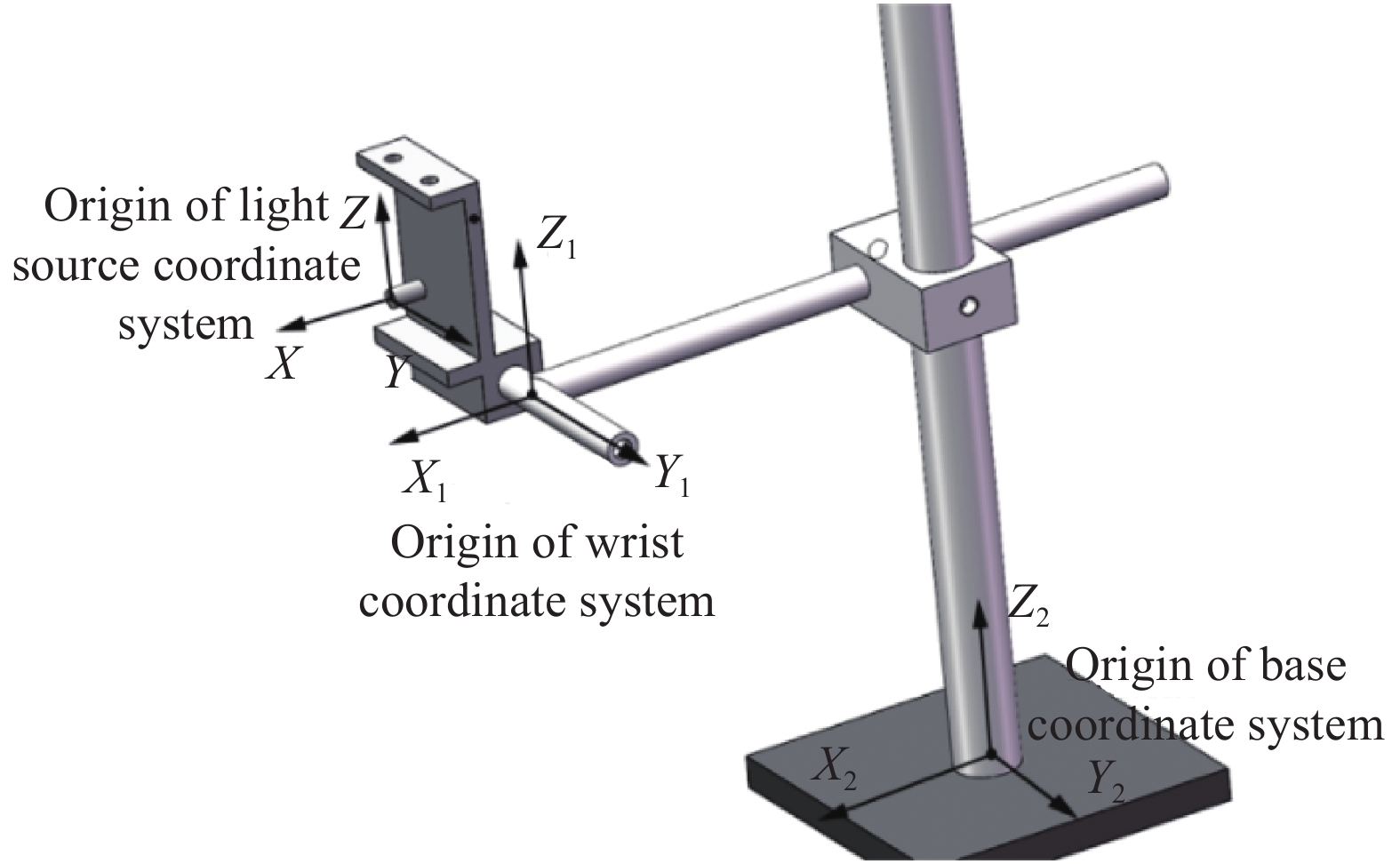
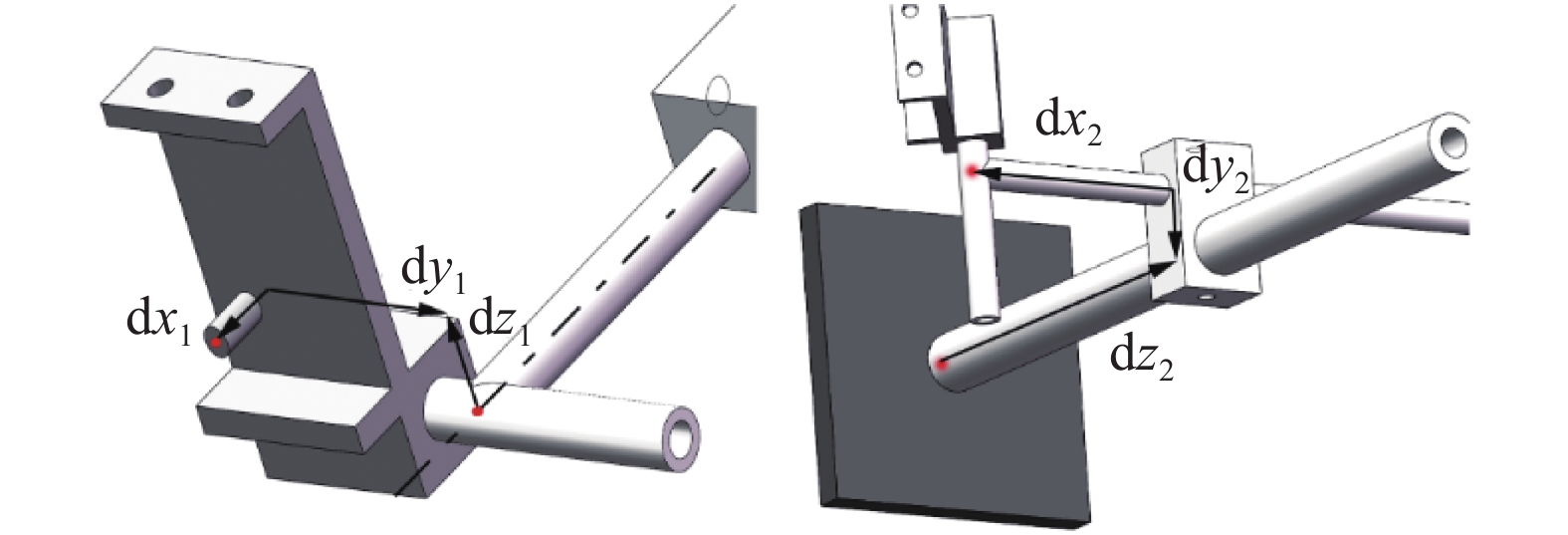
单个LED数学模型关键参数确定后,结合图2及上文分析,建立如图4所示的具有同方向、不同原点位置的基坐标系、腕坐标系与光源坐标系,开展条形LED阵列照度建模。此时,光源的空间位姿参数可由支架的相关位姿参数获得。支架相关参数如图5所示,其中
$ {\rm{d}}{x_1} $ 、$ {\rm{d}}{y_1} $ 、$ {\rm{d}}{z_1} $ 为光源坐标系原点与腕坐标系原点在笛卡尔坐标系下的偏移量,$ {\rm{d}}{x_2} $ 、$ {\rm{d}}{y_2} $ 、$ {\rm{d}}{z_2} $ 为腕坐标系原点与基坐标系原点在在笛卡尔坐标系下的偏移量,$ {\theta _1} $ 为$ {Y_1} $ 轴转角,$ {\theta _2} $ 为$ {Z_2} $ 轴转角,且正方向满足右手螺旋定则。则光源的支架模型建立后$ {\rm{d}}{x_1} $ 、$ {\rm{d}}{y_1} $ 、$ {\rm{d}}{z_1} $ 和$ {\rm{d}}{y_2} $ 为定值。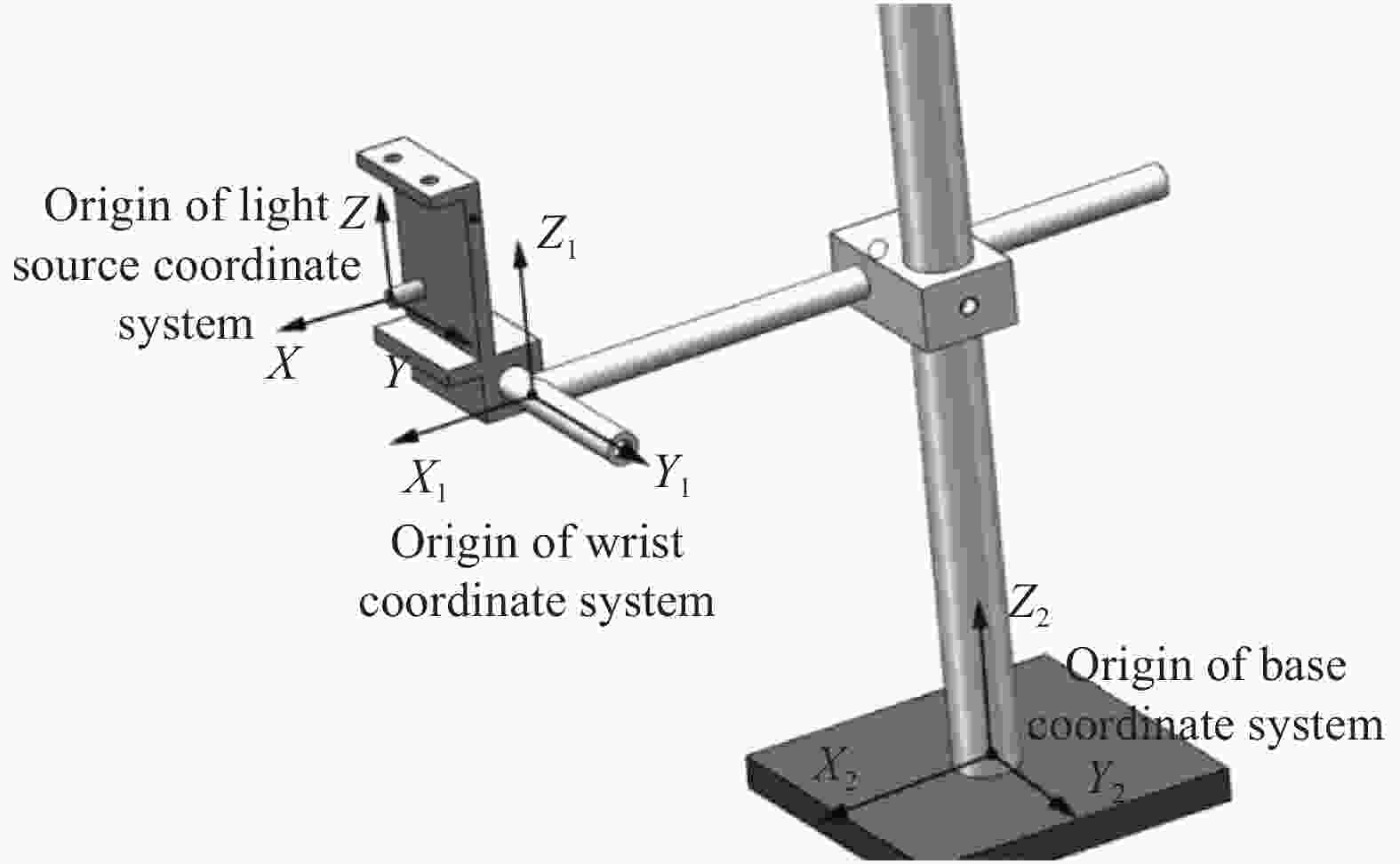
Figure 4. Schematic diagram of light source coordinate system
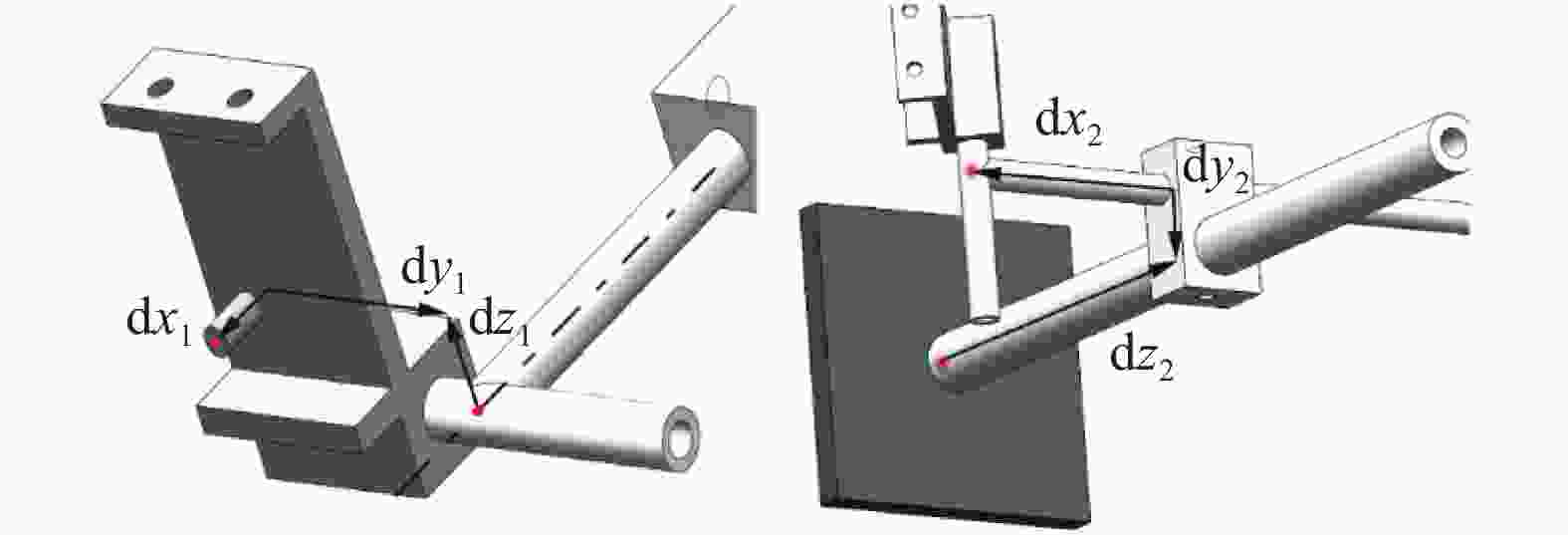
Figure 5. Schematic diagrams of related parameters labeled in different coordinate systems
根据当前光源支架硬件系统,可获取对应的
$ {\rm{d}}{x_1} $ 、$ {\rm{d}}{y_1} $ 、$ {\rm{d}}{z_1} $ 、$ {\rm{d}}{y_2} $ 、$ {I_0} $ 和$ m $ 的值,从而建立光源模型。考虑实际芯片封装质量视觉检测需求,结合光源支架实际可变范围,只需分析$ {\theta _1} \in (0,90^\circ ) $ ,$ {\theta _2} \in (0,30^\circ ) $ ,${\rm{d}}{x_2} \in (50\; {\rm{mm}}, $ $ 200\; {\rm{mm}})$ ,$ {\rm{d}}{z_2} \in (0,300\;{{\rm{mm}}} ) $ 范围内,具有最优照度效果时上述4个参数的具体数值。 -
在进行条形LED阵列光源建模研究中,为便于公式(1)中
$ \alpha $ 、$ \beta $ 和$ d $ 的计算,将单个光源对目标点产生的照度值按向量的形式分析,如图6所示。设光源到目标点向量为$a_1$ ,光源所在平面法向量为$a_2$ ,空间竖直向量恒定为$ G = (0,0, - 1) $ ,$ L $ 为光源点到目标点的欧式距离。则$ d $ 、$ \alpha $ 、$ \beta $ 可通过公式(12)~(14)计算获得: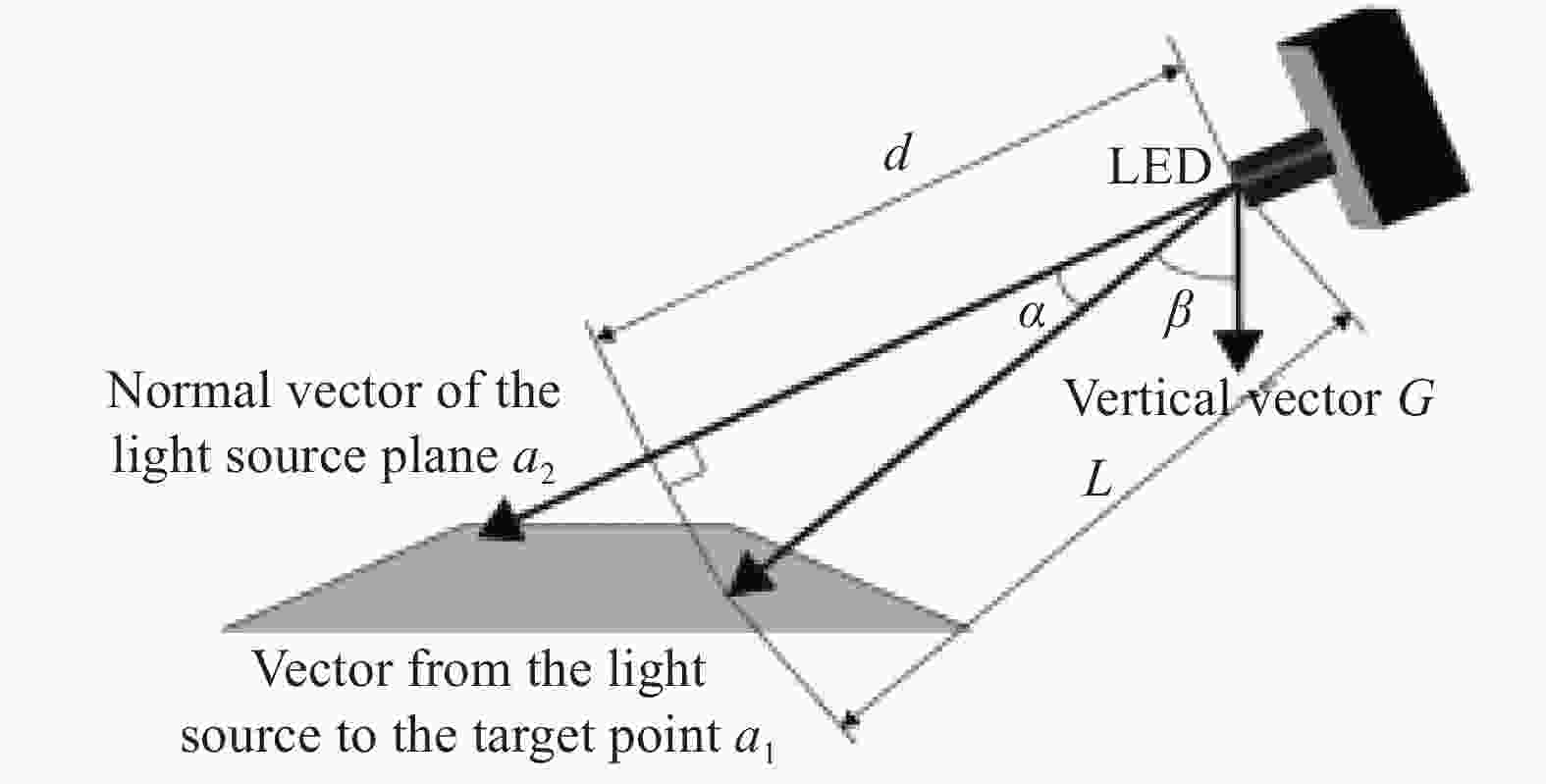
Figure 6. Schematic diagram of vector analysis
将计算获得的对应的
$ d $ 、$ \alpha $ 、$ \;\beta $ 代入公式(1)即可获得条形LED阵列光源中单个LED在当前空间位姿下对该目标点的照度值。光源坐标系到腕坐标系的变换,以及腕坐标系到基坐标系的变换,可分别由公式(15)和(16)获得:
此时条形LED阵列光源的数学模型建立步骤如下:
步骤1:向量
$a_1$ 可由基坐标系下被测点坐标$\left( {\begin{array}{*{20}{c}} {{x_{21}}},{{y_{21}}},{{{\textit{z}}_{21}}} \end{array}} \right)$ 与LED坐标$\left( {\begin{array}{*{20}{c}} {{x_{22}}},{{y_{22}}},{{{\textit{z}}_{22}}} \end{array}} \right)$ 获得。光源法向量$a_2$ 可由基坐标系下光轴与被测面交点坐标$\left( {\begin{array}{*{20}{c}} {{x_{23}}},{{y_{23}}},{{{\textit{z}}_{23}}} \end{array}} \right)$ 与LED坐标$\left( {\begin{array}{*{20}{c}} {{x_{22}}},{{y_{22}}},{{{\textit{z}}_{22}}} \end{array}} \right)$ 获得,如公式(17)所示:步骤2:将步骤1中的向量
$a_1$ 、光源的法向量$a_2$ 、每个LED到每个被测点的欧式距离$ L $ 经公式(12)~(14)转化为$ d $ 、$ \alpha $ 、$ \beta $ ,其中$ L $ 的计算式为:步骤3:每个LED作用于同一被测点时,将对应位姿信息
$ d $ 、$ \alpha $ 、$ \beta $ 代入公式(1)后按公式(2)线性叠加,即可获得条形LED阵列的光源照度数学模型,如公式(19)所示: -
在芯片图像采集过程中,为获得亮度均匀且适中的图像,需要考虑平面照度的均匀度和平面平均照度[25-26]。因此文中考虑照度均匀度、梯度变化与照度对中度、阈值达标度、目标与背景区分度等4个方面因素,提出LED光源照度效果评价函数,对照度效果进行定量评价。
-
为适应不同尺寸类型的被测平面,文中提出改进均方误差评价
$f_1$ ,具体实现过程为:计算矩阵每行的平均照度值,记为$ {\bar e_r} $ ;计算矩阵每一列的照度平均值$ {\bar e_c} $ 。记点$ \left( {i,j} \right) $ 的照度值为$ e(i,j) $ ,总平面照度均值为$ \bar e $ 。将每行均方误差之和与被测点总数的比值定义为$ rs $ ,将每一列的均方误差之和与被测点总数的比值定义为$ cs $ ,被测面总的检测点数为$ row \cdot col $ ,其中$ row $ 为被测点总行数,$ col $ 为被测点总列数,则有:则
$f_1$ 计算公式为:式中:
$ P $ 、$ Q $ 分别为行列方向收缩系数,数值与该方向尺寸成反比。若被测面行列方向长度比为2:1,则$ P = 1 $ 、$ Q = 2 $ 。文中优化目标为$ 50\;{{\rm{mm}}} \times 50\;{{\rm{mm}}} $ 方形优化区域,故$ P $ 、$ Q $ 均为1。平面照度越均匀,改进均方误差评价$f_1$ 越小。 -
通过控制照度变化方向、变化幅值和各点照度偏离平面平均照度值的大小,进一步控制被测面的照度均匀性和照度变化复杂性,方便图像后续校正处理,根据微分积分控制思想,设计梯度复杂性评价
$f_{21}$ 和对中性评价$f_{22}$ 。将每行梯度复杂性评价
$ rg $ 、每列梯度复杂性评价$ cg $ 、每行对中性评价$ rn $ 、每列对中性评价$ cn $ 分别定义为:则总梯度复杂性评价(微分项)与总对中度评价(积分项)分别为:
当梯度方向恒定,且变化数值越小时,梯度复杂性评价
$f_{21}$ 越小;每点的照度值越接近平均照度值时,对中性评价$f_{22}$ 越小。 -
为避免计算结果出现平面平均照度接近于0的无效结果,文中设计了阈值达标度评价
$f_3$ :式中:阈值
$ thresh $ 为条形LED阵列中LED数量与单个LED照度期望值的乘积,文中条形LED阵列光源由40个LED组成,取单个LED照度期望值为100 lx,则阈值$ thresh $ 取4 000 lx。 -
为了进一步帮助相机区分被测面(即目标区域)与背景面,设置目标与背景区分度评价
$f_4$ ,$f_4$ 为高度${{Z}}$ 方向下降1 cm时,平面照度值变化量的描述:式中:
$ {e_{ - 1}}(i,j) $ 为对应于$ (i,j) $ 点高度方向下降1 cm的照度值。当被测面与背景面照度差异越大、区分越明显时,此项越大。 -
照度效果评价函数为上述五项评价函数的加权和,即:
式中:
$c_1$ 为照度方差权值,控制平面照度值的方差;$c_{21}$ 为梯度变化权值,控制照度值梯度的变化速度;$c_{22}$ 为对中度权值,控制起始点照度值与平均照度值的差值;$c_3$ 为阈值达标度权值,控制最低平均照度值,筛出平均照度值过低的结果;$c_4$ 为目标与背景区域照度区分度权值,控制目标区域与背景区域的区分程度。为使照度效果最优,应使其评价函数式(28)取值最小,此时
$({\theta _1},{\theta _2},{\rm{d}}{x_2},{\rm{d}}{{\textit{z}}_2})$ 为位姿参数的最优解,即:优化后的照度分布应满足第二类照度分布曲线规律[8,27],该曲线由三部分组成,首先照度快速增加,然后有一较宽的、照度呈缓慢变化的平坦区域,最后照度迅速下降。此次优化目标为1.2节所描述的方形单次检测区域的照度分布及光照效果,故应使该方形检测区域位于照度缓慢变化的平坦区域内。因此通过多次重复试验得出,当
$c_1 = 0.6$ ,$c_{21} = 1.8$ ,$c_{22} = 0.8$ ,$c_3 = 1$ ,$c_4 = 0.6$ 时,该评价函数的预期优化结果可相对准确地表征第二类照度分布曲线规律,以及较好的光照效果,最优平面理论相对照度分布结果见下文。 -
公式(29)是一个高维优化问题,存在多个局部极小点,因此可采用全局优化算法进行求解。樽海鞘算法源于对樽海鞘群捕食行为的研究。在捕食过程中,领导者朝着食物移动并且指导紧随其后的追随者的移动,每一个追随者的移动只受前一个樽海鞘影响。这样的运动模式使得樽海鞘链有较强的全局搜索和局部探索能力。但原始樽海鞘算法存在种群多样性不足且在迭代后期不易精确寻优等问题[15]。
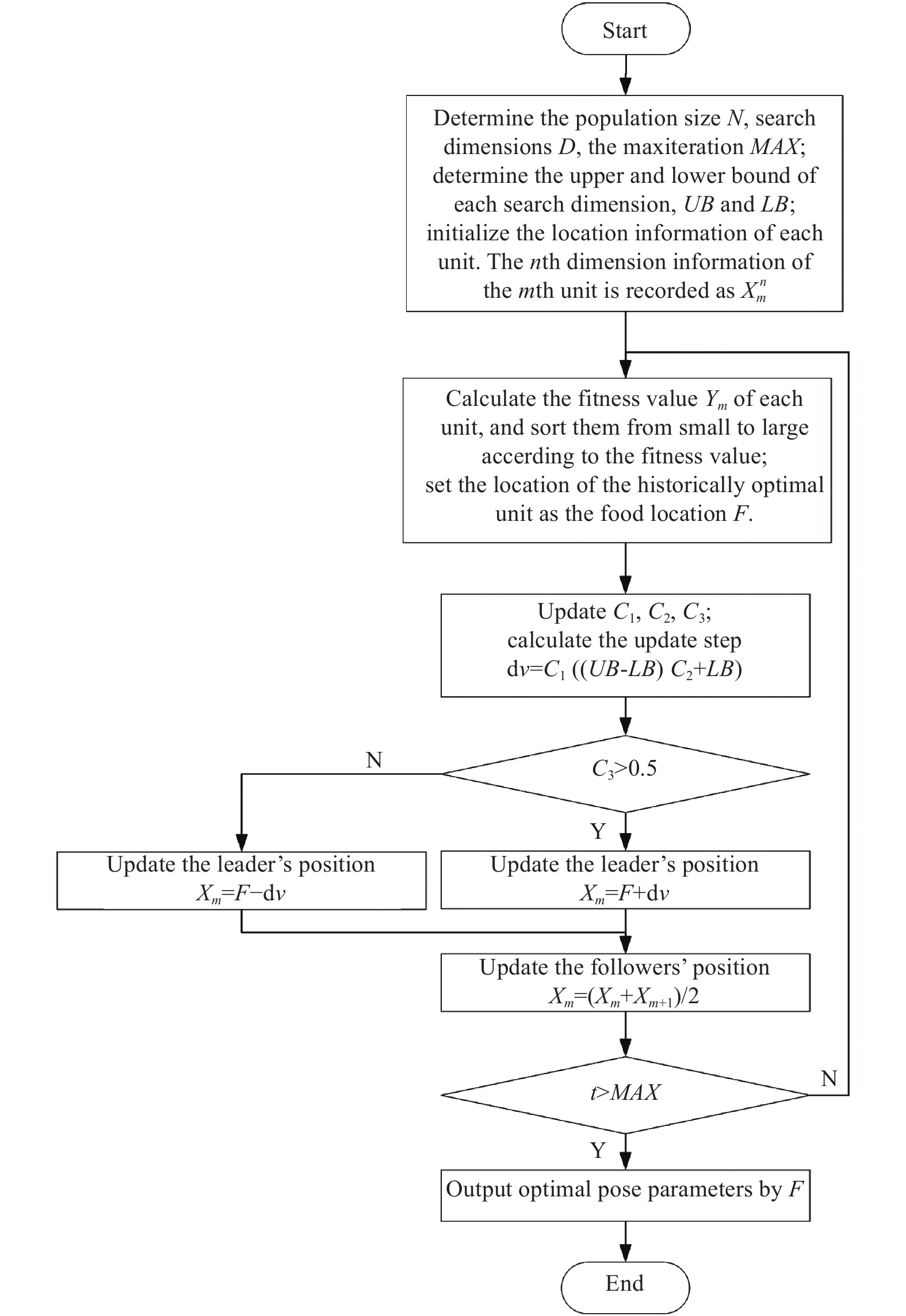
原始樽海鞘算法应用于光源照度效果评价函数寻优过程的实现步骤如下:
步骤1:初始化阶段确定种群数量
$ N $ ,搜索维度数$ D $ ,最大迭代次数$ MAX $ ,每一维数据的上边界和下边界$ UB $ 和$ LB $ ,并初始化每一个单元每一维的信息,其中第$ m $ 个单元的第$ n $ 维位置信息记为$ X_m^n $ ;步骤2:计算每一个单元适应度
$ {Y_m} $ ,按从小到大排列,前50%定为领导者,后50%定为追随者,并将历史最优单元的位置定为食物的位置$ F $ ;步骤3:更新
${C_1}$ 、${C_2}$ 、${C_3}$ ,如公式(30)、(31)所示,其中${C_2}$ 、${C_3}$ 为0~1之间的随机数,$ t $ 为当前迭代步数,更新步长${\rm{d}}v$ ,如公式(32)所示:步骤4:根据
${C_3}$ 的大小,由公式(33)更新领导者的位置信息;步骤5:由公式(34)更新追随者位置信息;
步骤6:若迭代步数大于
$ MAX $ 则结束迭代,否则重回步骤2;步骤7:输出历史最优位置
$ F $ 对应的位姿参数$({\theta }_{1},{\theta }_{2},{\rm{d}}{x}_{2},{\rm{d}}{{\textit{z}}}_{2})$ 。原始樽海鞘算法流程图如图7所示。
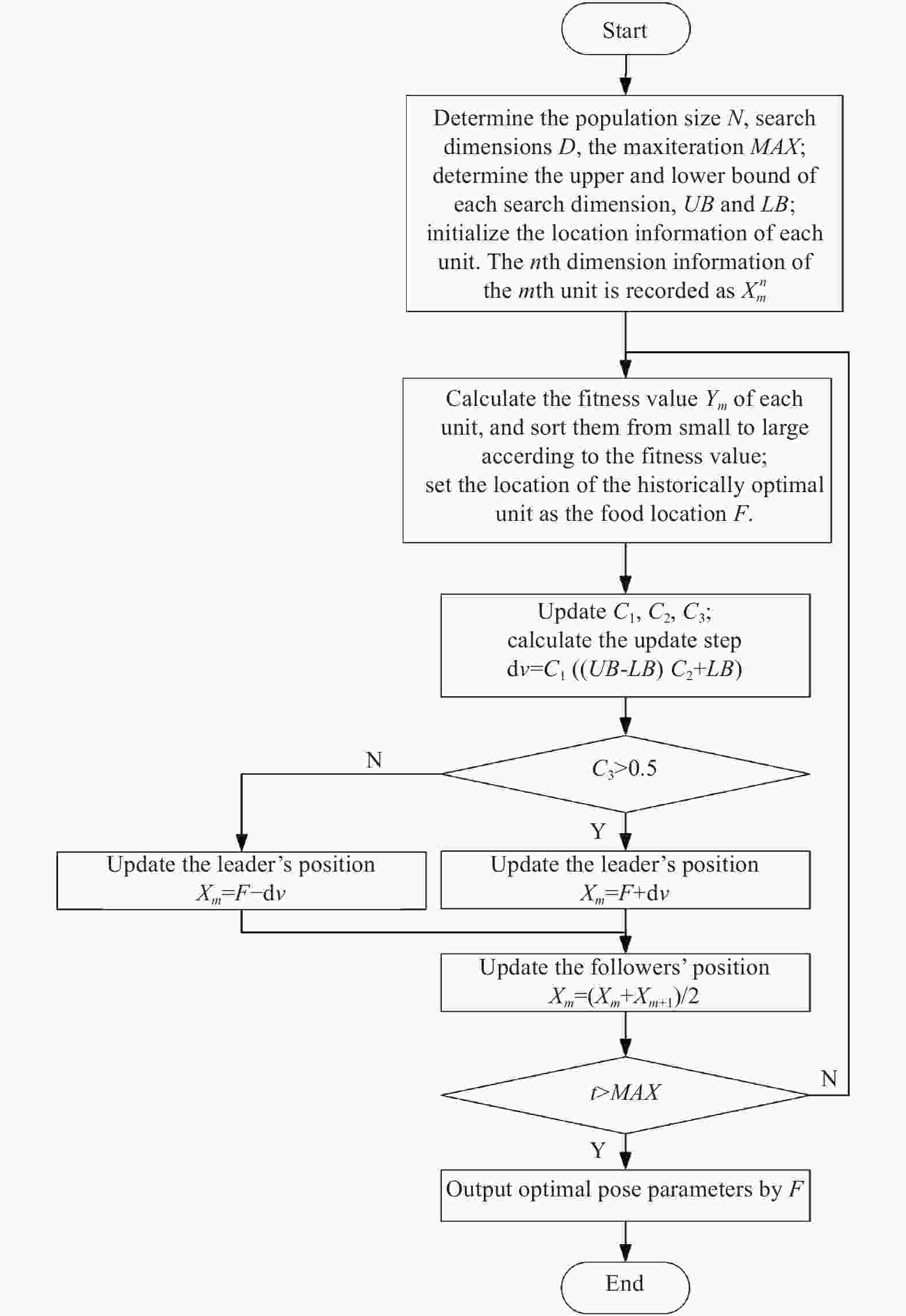
Figure 7. Flow chart of the original Salp swarm algorithm
-
针对传统樽海鞘算法存在的早熟、易陷入局部最优点等问题,文中提出一种改进的樽海鞘算法,通过改进算法收敛系数、速度、领导者与追随者等更新策略,增强搜索区域的多样性。具体改进从以下3个方面展开:
(1)针对原始算法同一次迭代中每一个单元
${C_1}$ 的数值、趋向的目标相同、搜索区域较少等问题,文中将${C_1}$ 的更新公式改进为$ {sigmoid} $ 函数类型,如公式(35)所示,其中${C_0}$ 为初始值,一般设为0.9,使其在每次迭代中每一个单元位置更新完成后均能有效更新一次,增加搜索区域的多样性。设置调速因子$ s $ 控制其变化的速度,如公式(36)所示,使其在初始阶段保持高权值,并在一定迭代次数后快速减小。(2)为使算法能跳出局部最优点,在位置更新公式上,弱化食物点
$ F $ 的重要性,并加入对当前迭代步中的个体最优值${X_{{\rm{best}}}}$ 信息的参考,增加算法的活性。并在位置变化信息中随机选取一维,将其变化量缩减为原先的10%,如选取第$ \sigma $ 维参数,使变化方向由原先的正向变为伪正切方向,如公式(37)所示,加大搜索范围,其中$ \sigma $ 为$ {\text{[1,}}n{\text{]}} $ 范围内的随机正整数。改进的位置更新公式如公式(38)所示,其中${C_4}$ 为惰性因子,致使算法收敛;${C_5}$ 为活性因子,提高算法跳出局部最优点的能力。经多次实验验证,取${C_5}$ 为0.9,${C_4}$ 为0.1时可有效增强算法活性。(3)为了使领导者的信息尽可能多的传给追随者,将追随者位置变化公式的适用范围由原先的后50%扩展为除第一个单元外的所有单元。
-
将改进樽海鞘算法(Improved Salp Swarm Algorithm,ISSA)应用于光源照度效果评价函数寻优过程的具体实现如下:
(1)初始化:包括位姿参数
$ {X_m} $ 及其上下界UB、LB,函数评价值f,单元个数N及每个单元的维数D,最大迭代次数MAX,历史最优评价值$ {Y_{{\text{gbest}}}} $ 及其对应的历史最优位姿参数F;(2) While 迭代次数t<MAX do
(3) 将本轮迭代中每一个元素按评价函数值从小到大排序,第一个单元为领导者,后50%为追随者,其余单元既是领导者又是追随者;
(4) 更新历史最优评价值
$ F $ 及其对应的位姿参数(${\theta _{1 {\rm{gbest}}}}$ ,$ {\theta _{2{\text{gbest}}}} $ ,${\rm{d}}{x_{2{{\rm{gbest}}} }}$ ,${\rm{d}}{{\textit{z}}_{{\text{2}}{{\rm{gbest}}} }}$ );(5) 按公式(35)更新
${C_1}$ ,按公式(31)更新${C_2}$ 、${C_3}$ ;(6) 按公式(32)、(37)计算寻优方向
${\rm{d}}\hat v$ ;(7) 按公式(38)更新领导者位置;
(8) 按公式(34)更新追随者位置;
(9) 按公式(28)计算各单元的函数评价值;
(10)
$ t = t{\text{ + 1}} $ ;(11) End while
(12)输出当前最优的位姿参数(
${\theta _{1 {\rm{gbest}}}}$ ,$ {\theta _{2{\text{gbest}}}} $ ,${\rm{d}}{x_{{\text{2 gbest}}}}$ ,${\rm{d}}{{\textit{z}}_{{\text{2 gbest}}}}$ )作为最终优化结果。其中各参数初始值设置如表1所示。
Population size
NSearch dimension
DMax iteration
MaxInertia factor
C4Active factor
C580 4 700 0.1 0.9 Table 1. Initialization parameters of ISSA
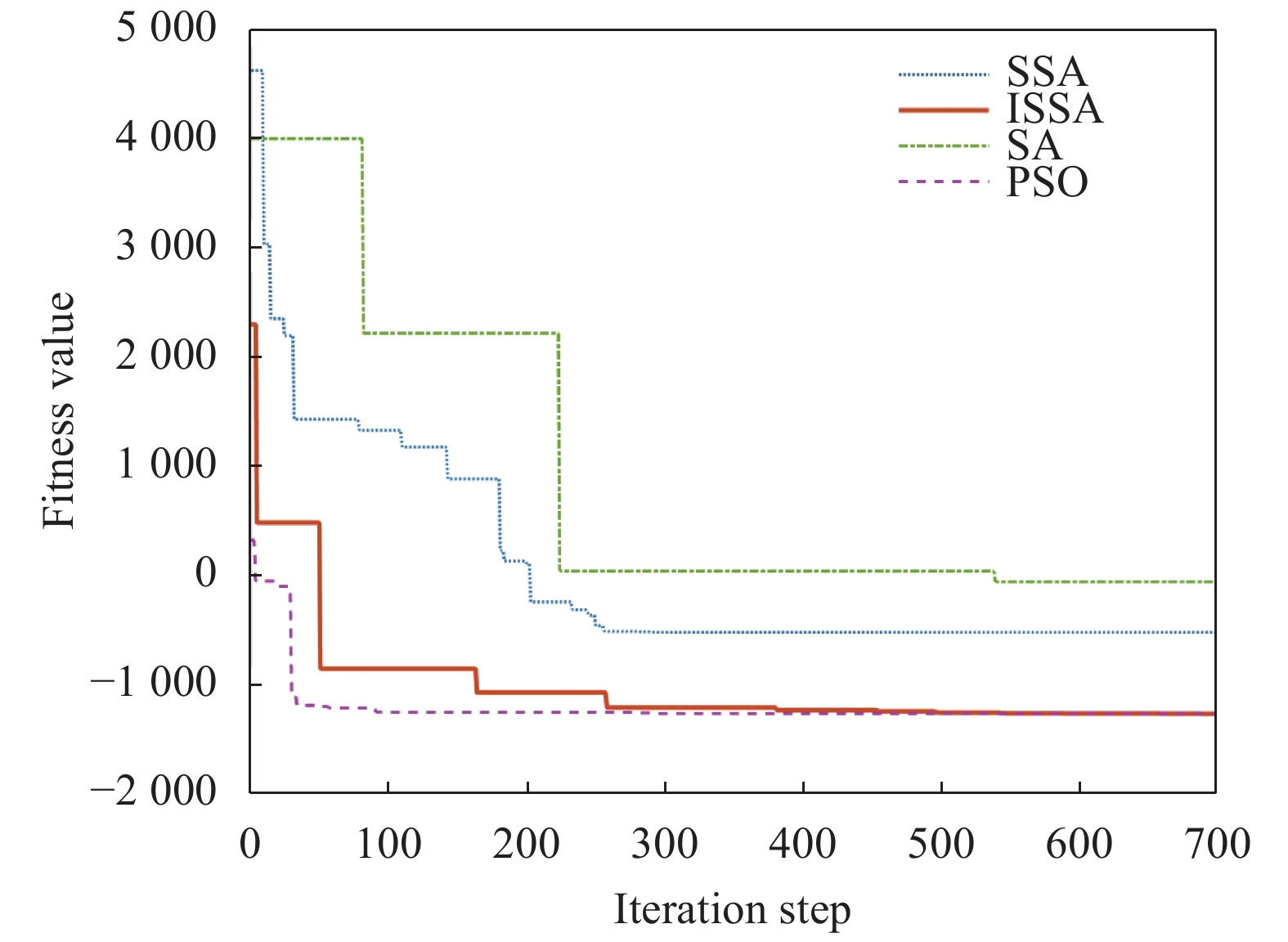
基于2.6 GHz CPU、16 GB内存与MATLAB R2018 b开发环境,将文中提出改进樽海鞘算法与粒子群优化、模拟退火、原始樽海鞘算法进行照度效果评价函数的寻优对比,获得各算法收敛对比结果如图8所示。在寻优精度方面,文中提出的改进樽海鞘最优评价函数值为
${f_{{\text{ISSA}}}} = - 1 \;261$ ,原始樽海鞘算法最优评价函数值为$ {f_{{\text{SSA}}}} = - 517.3 $ ,粒子群算法最优评价函数值为$ {f_{{\text{PSO}}}} = - 1\;259 $ ,模拟退火法最优评价函数值为$ {f_{{\text{SA}}}} = $ $ - 55.21 $ ,可以看出改进樽海鞘算法可获得相对最小评价函数值;在收敛性能方面,粒子群算法收敛速度最快,但在迭代291次后陷入局部最优;模拟退火法在迭代537次后能够跳出局部最优,但寻优结果与最佳结果之间存在较大差距;原始樽海鞘算法寻优能力较强,但在迭代310次后陷入局部最优;而改进的樽海鞘算法不仅继承了原始樽海鞘的寻优能力,还能够克服早熟、易陷入局部最优的弱点,在迭代660次后仍能跳出局部最优,并在寻优精度方面优于粒子群算法。因此文中提出的改进樽海鞘算法相较其他算法,可以有效克服早熟、容易陷入局部最优点等问题。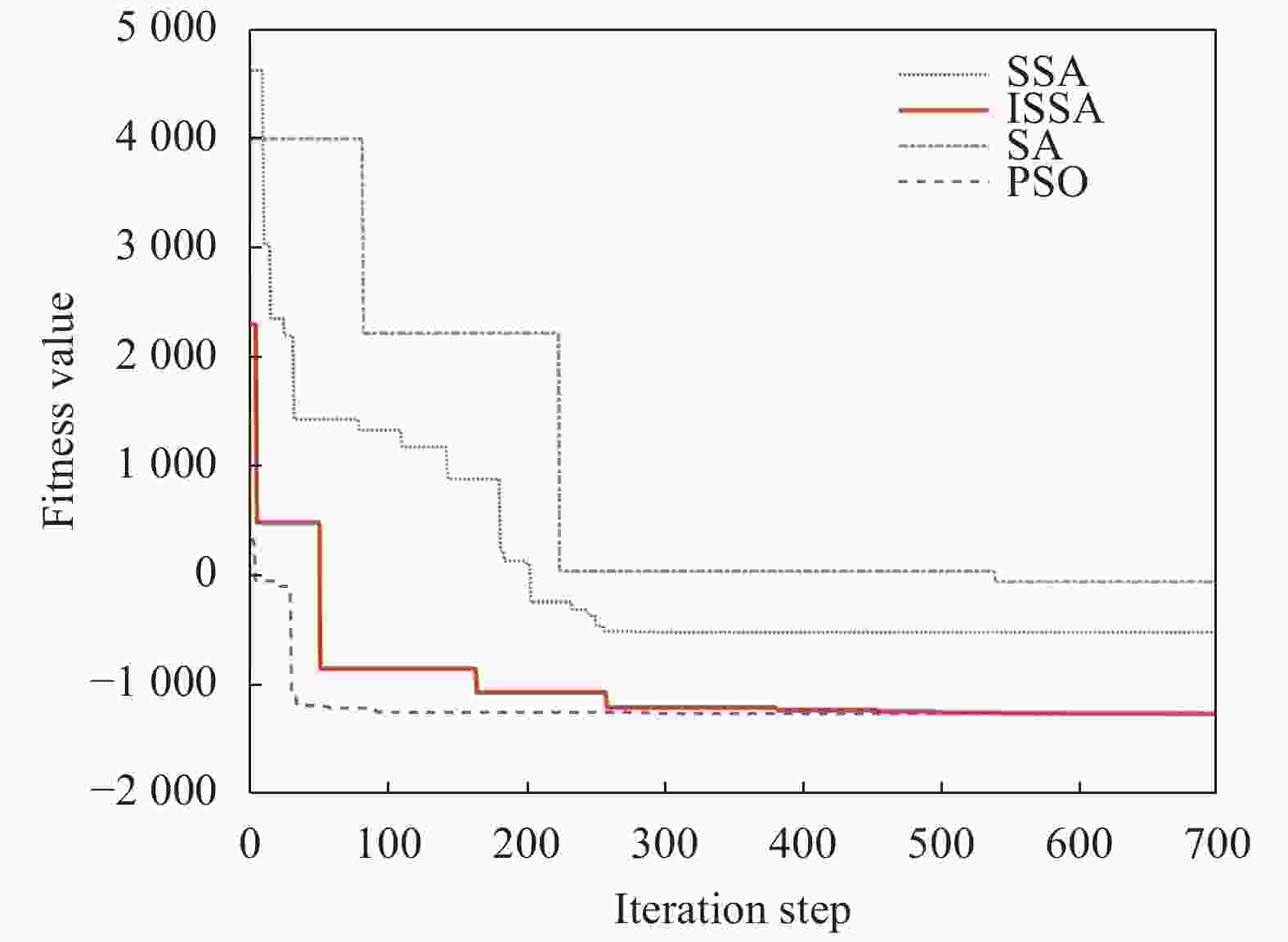
Figure 8. Convergence comparison of different algorithms
-
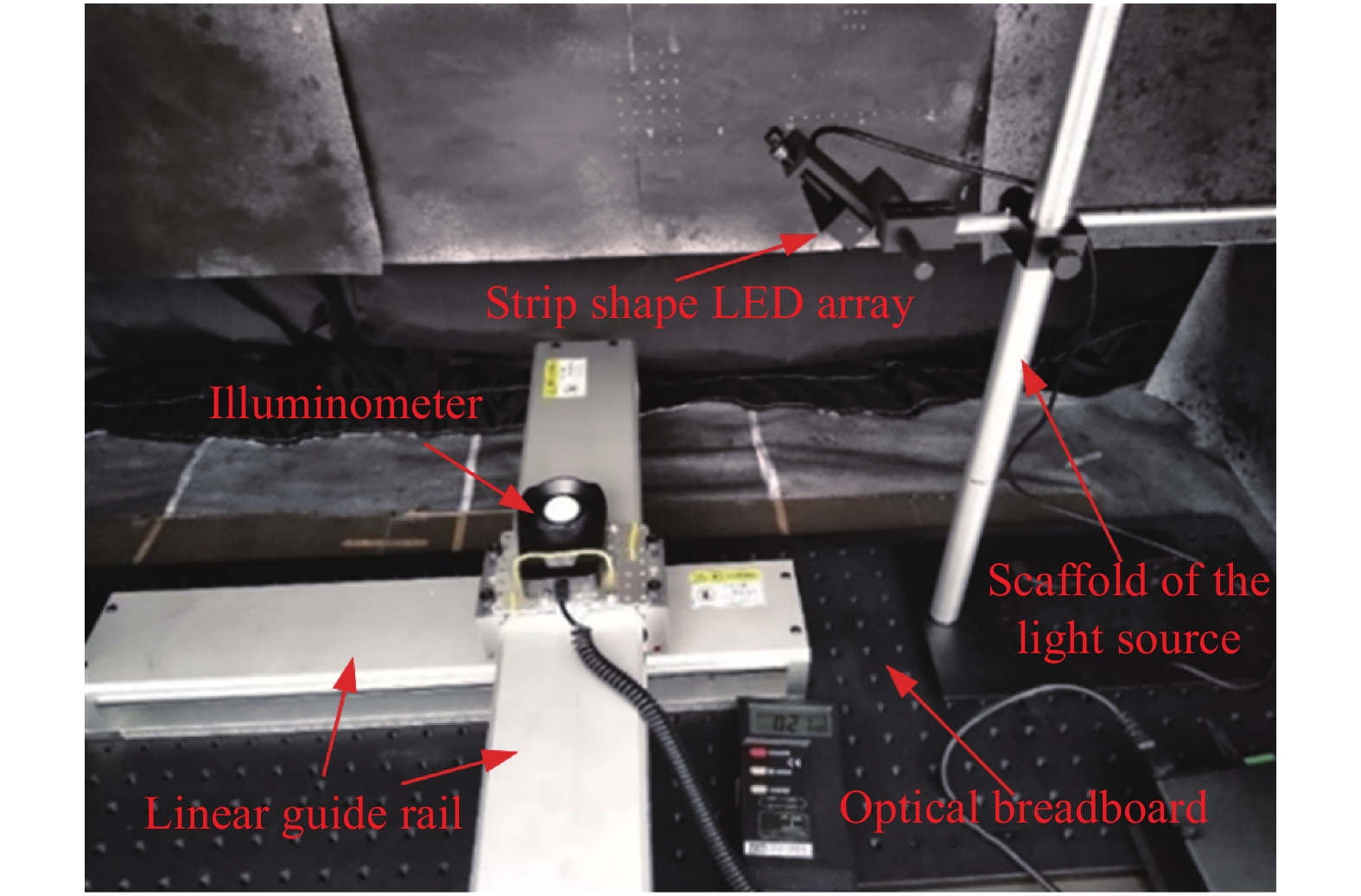
为进一步验证文中提出平面照度优化方法的有效性,搭建如图9所示实验台。X方向与Y方向采用有效行程400 mm的飞万KR60-S系列的直线滑轨,以保证位移量的准确性。底部布置光学面包板,以保证实验台平面度与刚度。光源采用聚图光电JH-LS6222条形光源与JH-AP-2 C光源控制器,条形LED光源为4行10列非相关LED排列而成,按水平布置,长度方向LED间隔5 mm,宽度方向LED间隔4 mm。光源照度测量采用台湾泰仕TES-1332 A照度计,测量范围为0~20 000 lx,测量精度1 lx。

Figure 9. Experimental platform of the plane illumination measurement
-
利用文中提出的改进樽海鞘算法对公式(29)所示的评价函数寻优,获得被测区域照度效果评价函数取最小值时的位姿参数为:(
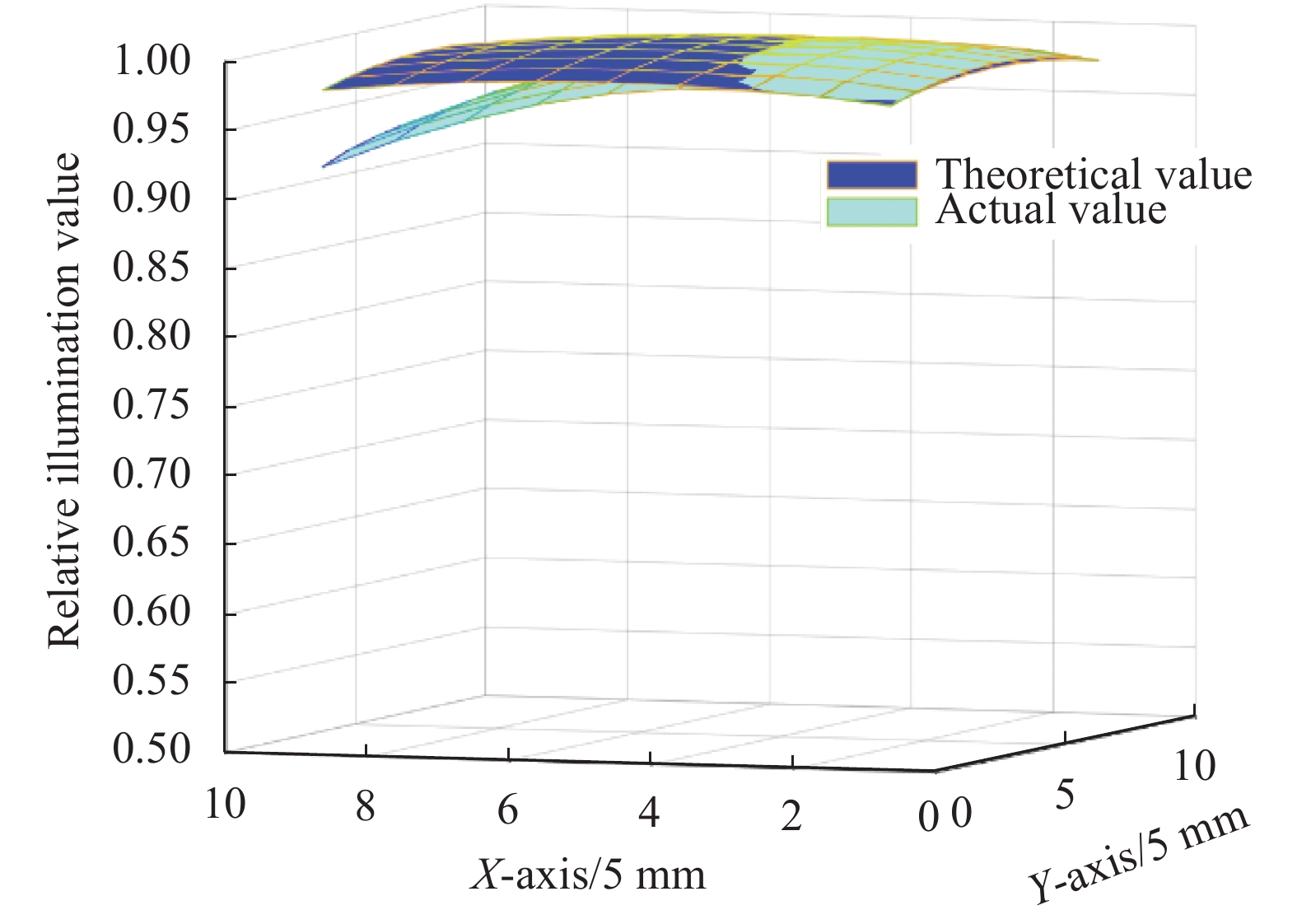
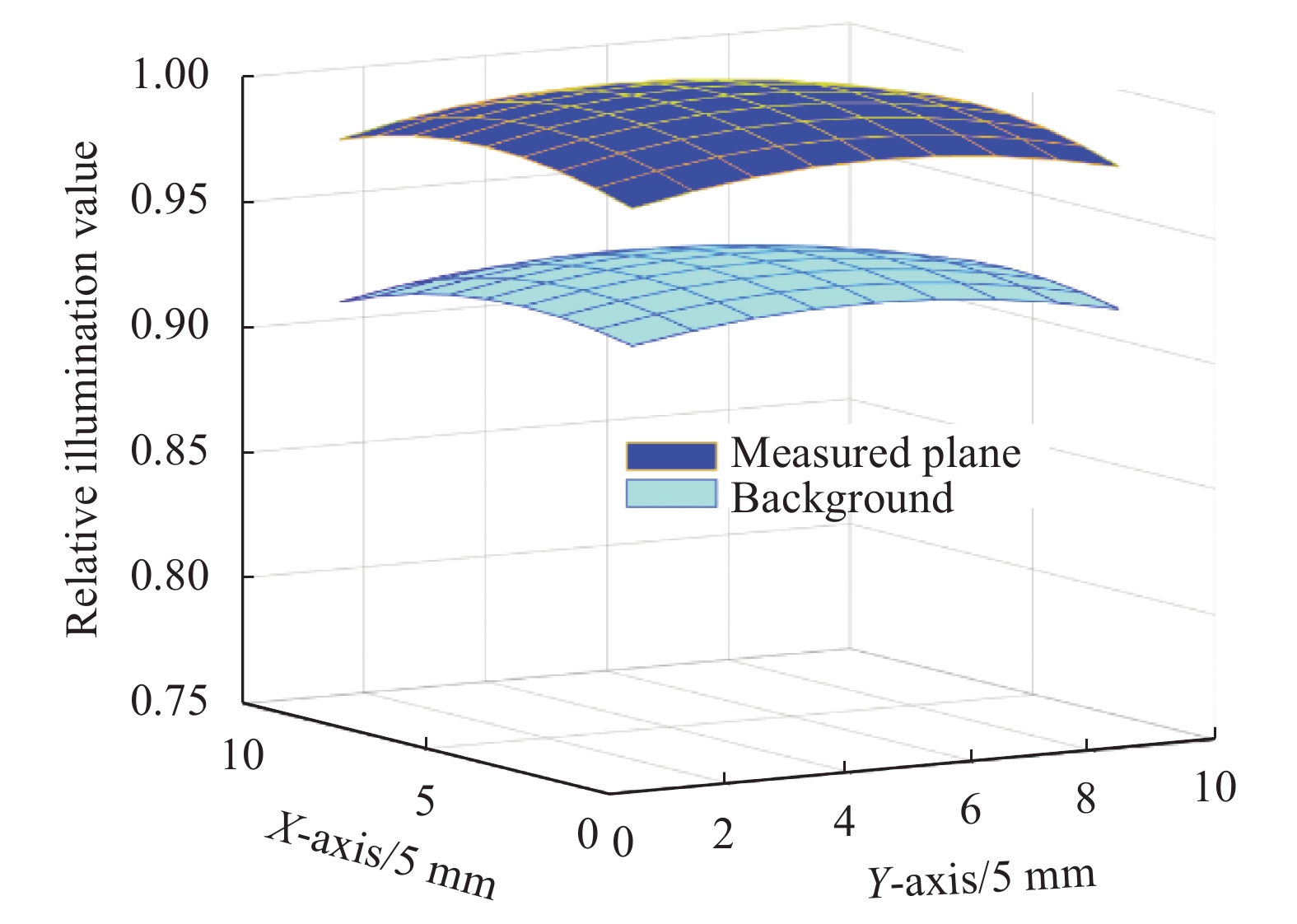
$ {\theta _1} = 39.89^\circ $ ,$ {\theta _2} = 12.13^\circ $ ,${\rm{d}}{x_2} = $ $ 50.12\;{{\rm{mm}}}$ ,${\rm{d}}{{\textit{z}}_2} = 298.89\;{{\rm{mm}}}$ )。此时由条形LED阵列光源模型优化计算获得的平面最优理论相对照度分布与由TES-1332 A照度计实际测量获得的相对照度分布对比如图10所示,理论被测面相对照度分布与理论背景面相对照度分布对比如图11所示,其中背景面的定义见2.4节。为获取更清晰的对比结果,采样间隔设置为5 mm。点$ (i,j) $ 的相对照度值$ {e_{{\text{re}}}}(i,j) $ 定义如公式(39)所示:式中:
$ e(i,j) $ 为被测面$ (i,j) $ 点的照度值;$ \bar e $ 为被测面的平均照度值。平面照度均匀度$ {e_{{\text{uni}}}} $ 定义为最小照度与平均照度的比值,如公式(40)所示:式中:
$ {e_{{\text{min}}}}(i,j) $ 为平面最小照度值。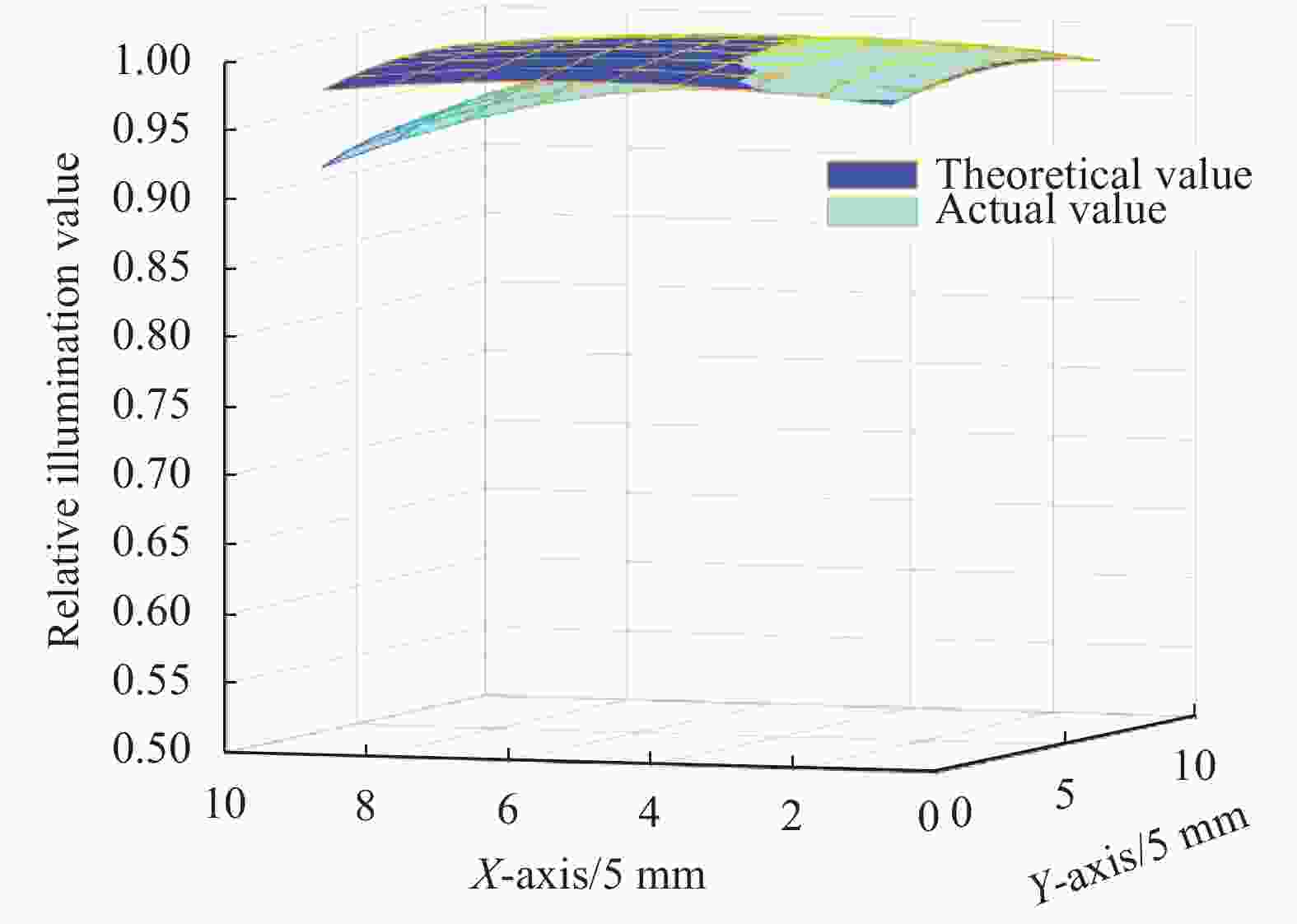
Figure 10. Comparison of theoretical and actual relative illumination distribution
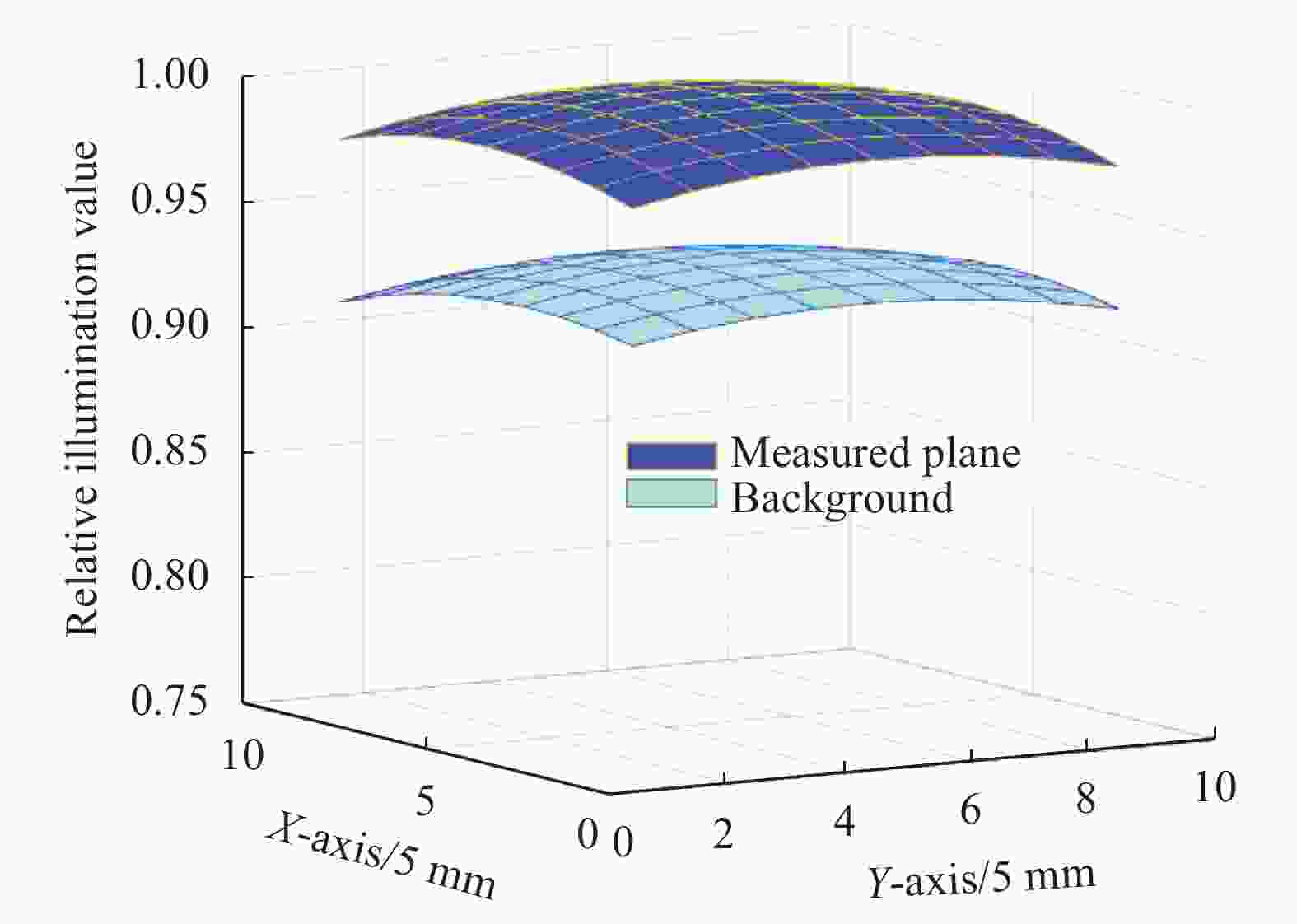
Figure 11. Comparison of theoretical illumination of the measured plane and the background
如图10所示,上方深蓝色照度分布为理论值,则被测面理论照度均匀度大于98.78%。平面各点的实际相对照度值与理论相对照度值接近,在相对照度值差距最大点相差5.57%以内;其实际平均照度值为727.68 lx,表明算法可有效避开平均照度值接近0的无效结果。故理论相对照度与实际相对照度分布规律相符。图11所示被测面与背景面理论平均照度相差6.5%左右,能够从平均照度值方面进一步有效区分目标区域与背景区域。
-
考虑调整
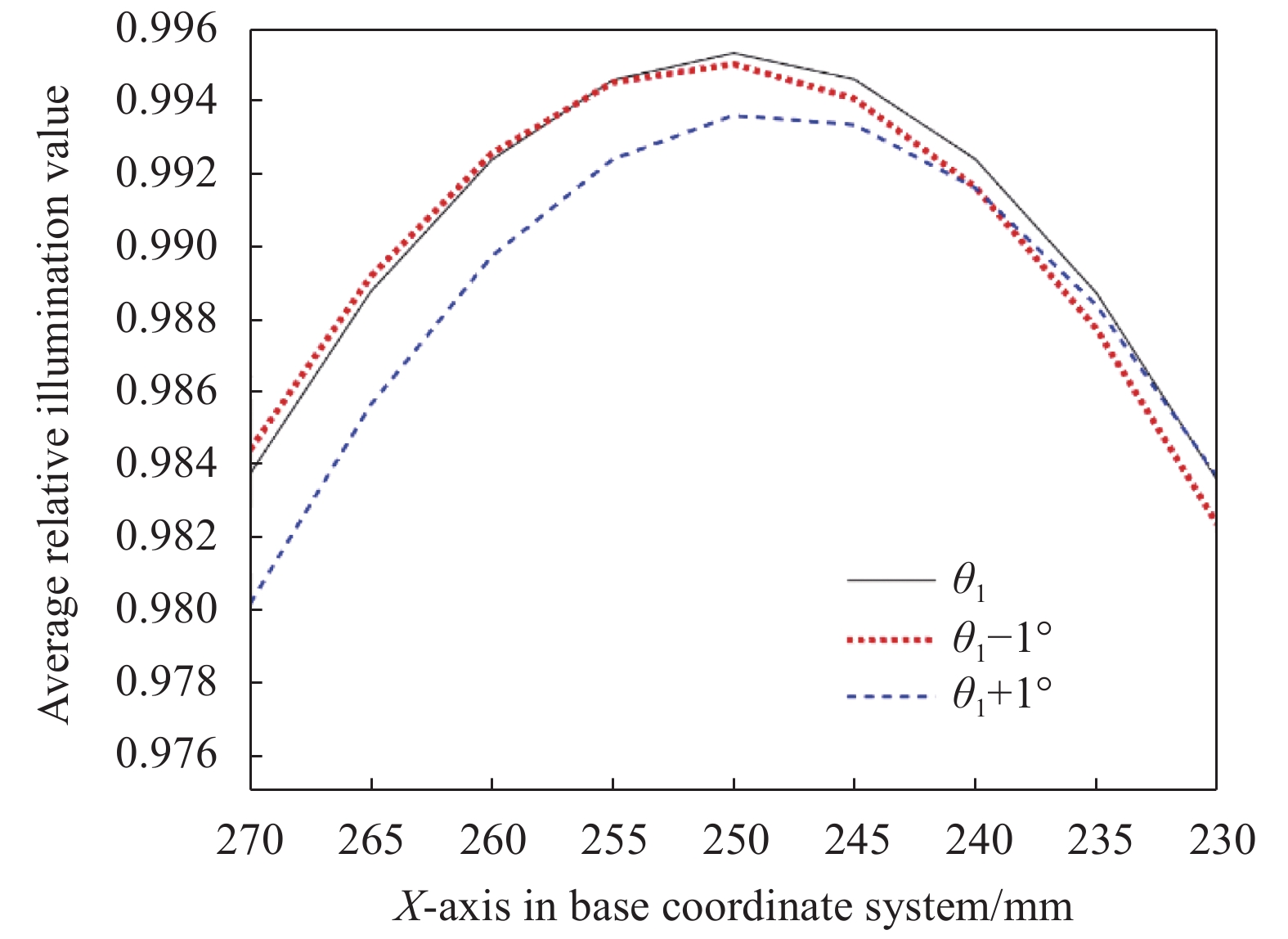
$({\theta _1},{\theta _2},{\rm{d}}{x_2},{\rm{d}}{z_2})$ 4项参数,即当其中任一参数偏离最优光照效果的位姿参数时,X轴方向上照度分布的变化情况。图12~15分别给出了$ {\theta _1} \pm 1^\circ $ 、$ {\theta _2} \pm 1^\circ $ 、${\rm{d}}{x_2} \pm 10\;{{\rm{mm}}}$ 与${\rm{d}}{{\textit{z}}_2} \pm 10\;{{\rm{mm}}}$ 时与原最优位姿下照度分布曲线对比。
Figure 12. Illumination distribution along the X-axis when
$ {\theta _1} $ changing by 1°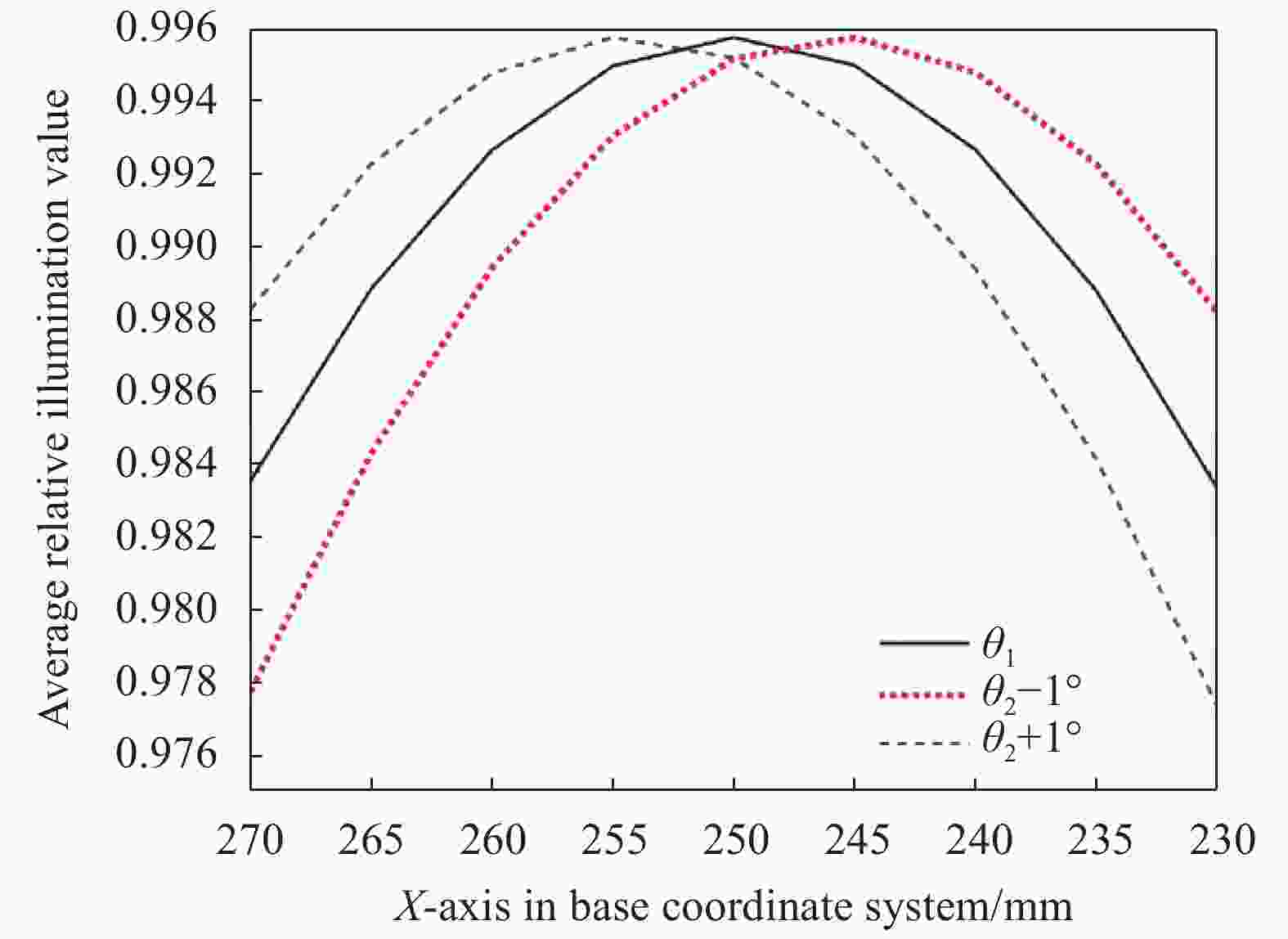
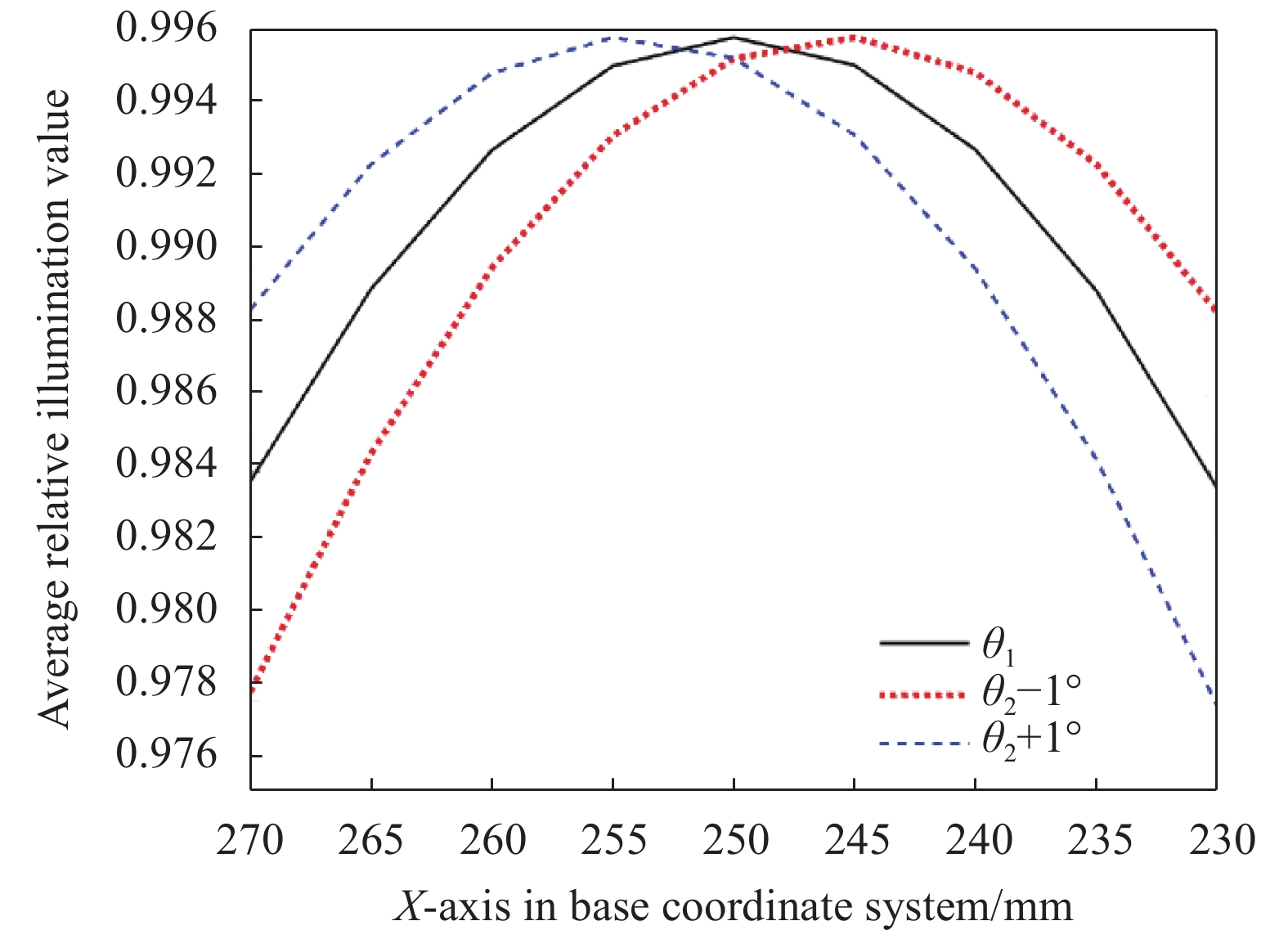
Figure 13. Illumination distribution along the X-axis when
$ {\theta _2} $ changing by 1°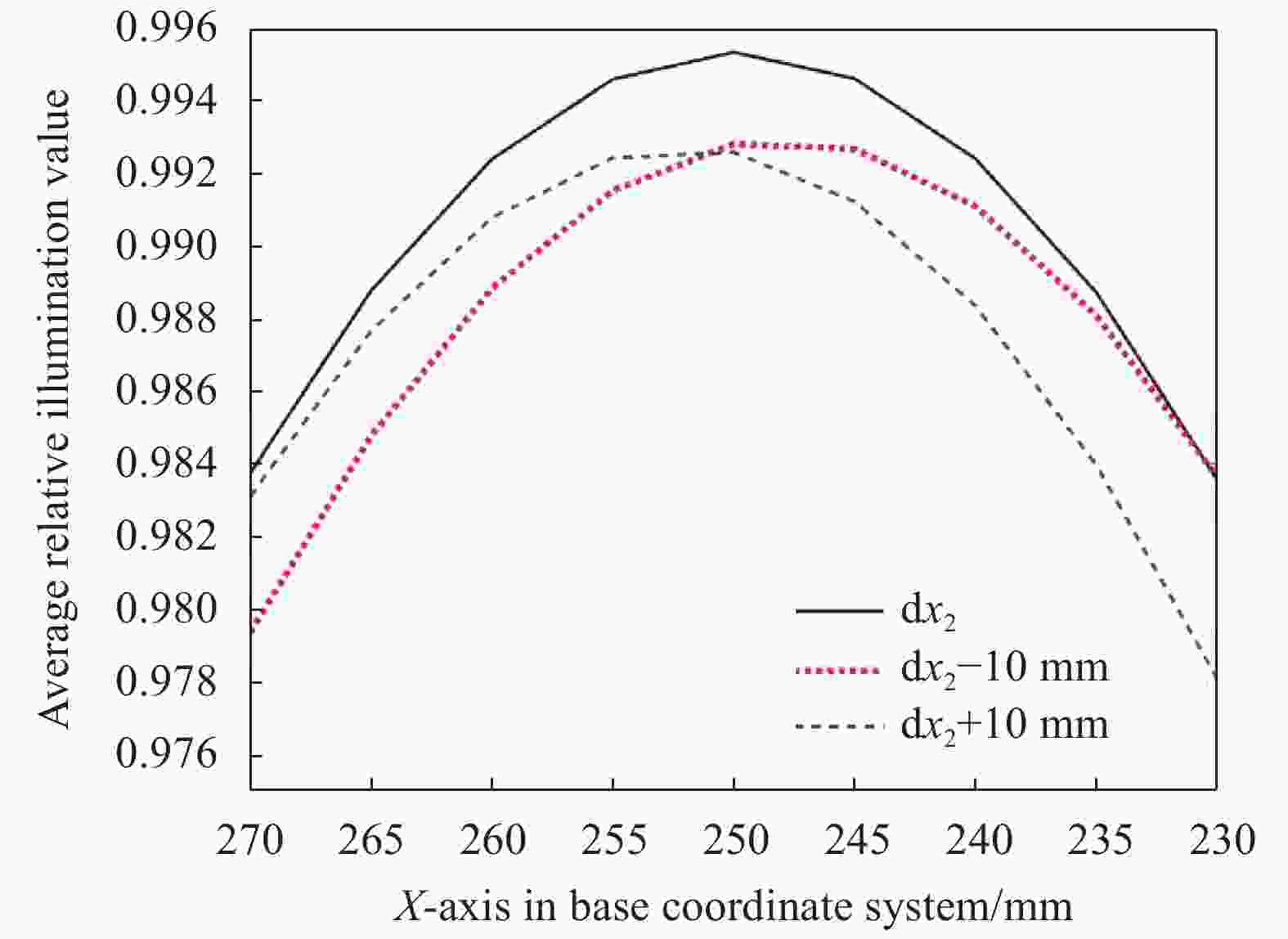
Figure 14. Illumination distribution along the X-axis when
${\rm{d}}{x_2}$ changing by 10 mm由图12可知,
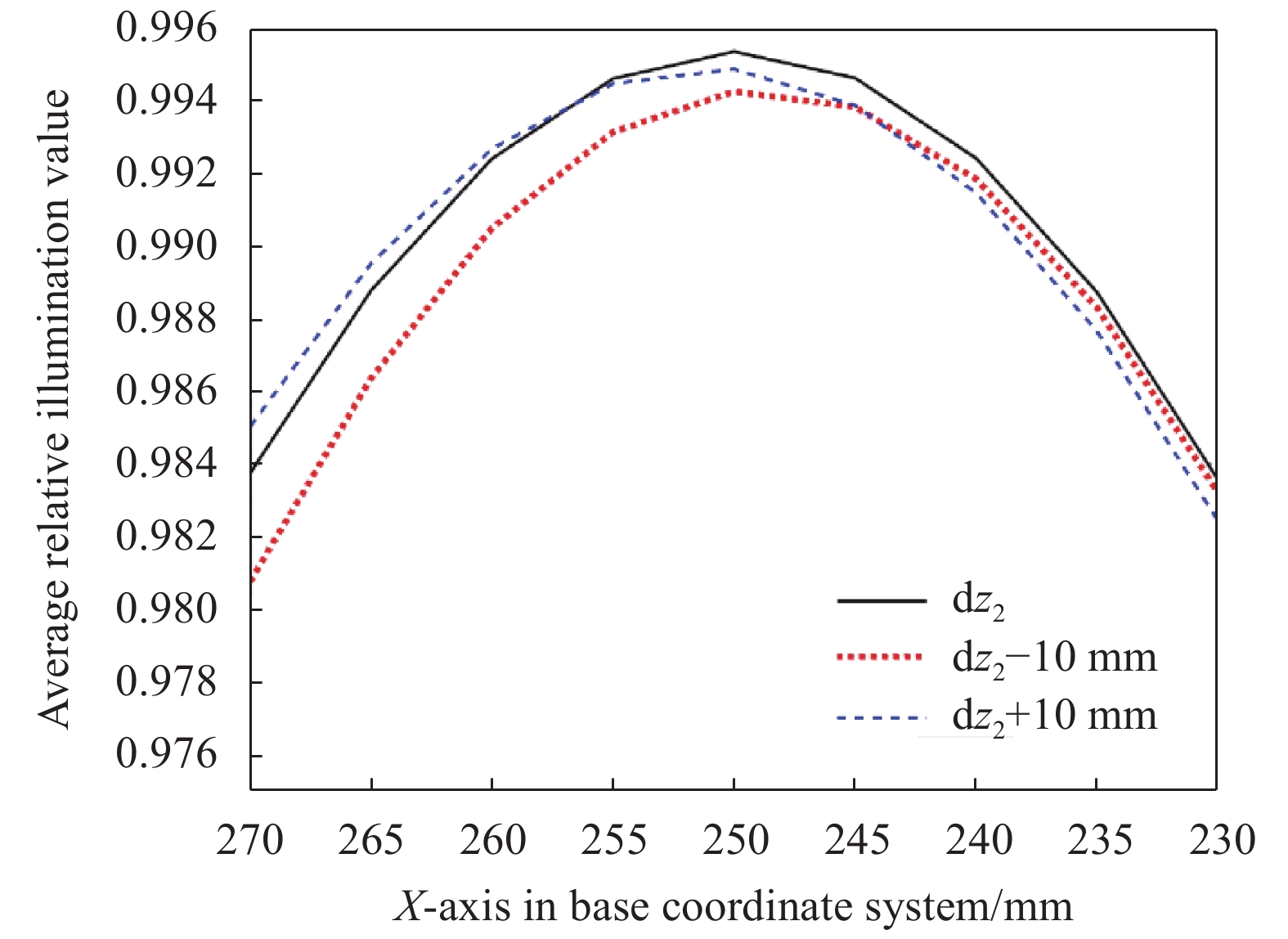
$ {\theta _1} \pm 1^\circ $ 均会使照度均匀度下降,照度均匀度分别减小0.39%、0.54%。由图13、14可知,$ {\theta _2} $ 和$ {\rm{d}}{x_2} $ 的变化会使平面照度分布对称度下降,即平面照度最高点会较大幅度脱离被测面中心,其中$ {\theta _2} \pm $ $ 1^\circ $ 会使照度均匀度分别下降0.53%、0.58%,$ {\rm{d}}{x_2} \pm 10\;{{\rm{mm}}} $ 会使照度均匀度分别下降1.46%、1.05%。由图15可知,${\rm{d}}{{\textit{z}}_2} \pm 10\;{{\rm{mm}}}$ 分别会使照度均匀度下降0.64%、0.65%。由于优化后照度值最高点位于被测区域的中心,故$ {\theta _1} + 1^\circ $ 会使照度中心由${x_2} = 250\;{{\rm{mm}}}$ 向${x_2} = 248\;{{\rm{mm}}}$ 的负方向偏移,照度分布曲线按逆时针方向旋转,造成照度分布成阶梯型;由于$ 0 < {\theta _1} < 90^\circ $ ,$ {\theta _2} $ 、$ {\rm{d}}{x_2} $ 、${\rm{d}}{{\textit{z}}_2}$ 向正方向变化则会引起照度中心向X轴正方向偏移,此时,平面照度分布具有更高的梯度,照度变化更显著,不利于采集图像的后续处理。根据3.3节获得最优评价函数值$ {f_{{\text{ISSA}}}} = - 1\;261 $ 及其光源位姿参数($ {\theta _1} = 39.89^\circ $ ,$ {\theta _2} = 12.13^\circ $ ,$ {\rm{d}}{x_2} = 50.12\;{{\rm{mm}}} $ ,${\rm{d}}{{\textit{z}}_2} = 298.89\;{{\rm{mm}}}$ ),当各参数变化时对应评价函数值分别如表2~5所示。由此可以看出,4项位姿参数在任一方向发生变化,均会使得平面照度均匀度有一定程度的下降,以及评价函数值一定程度的上升。故文中方法正确,可获取具有最佳照度效果的光源空间位姿参数。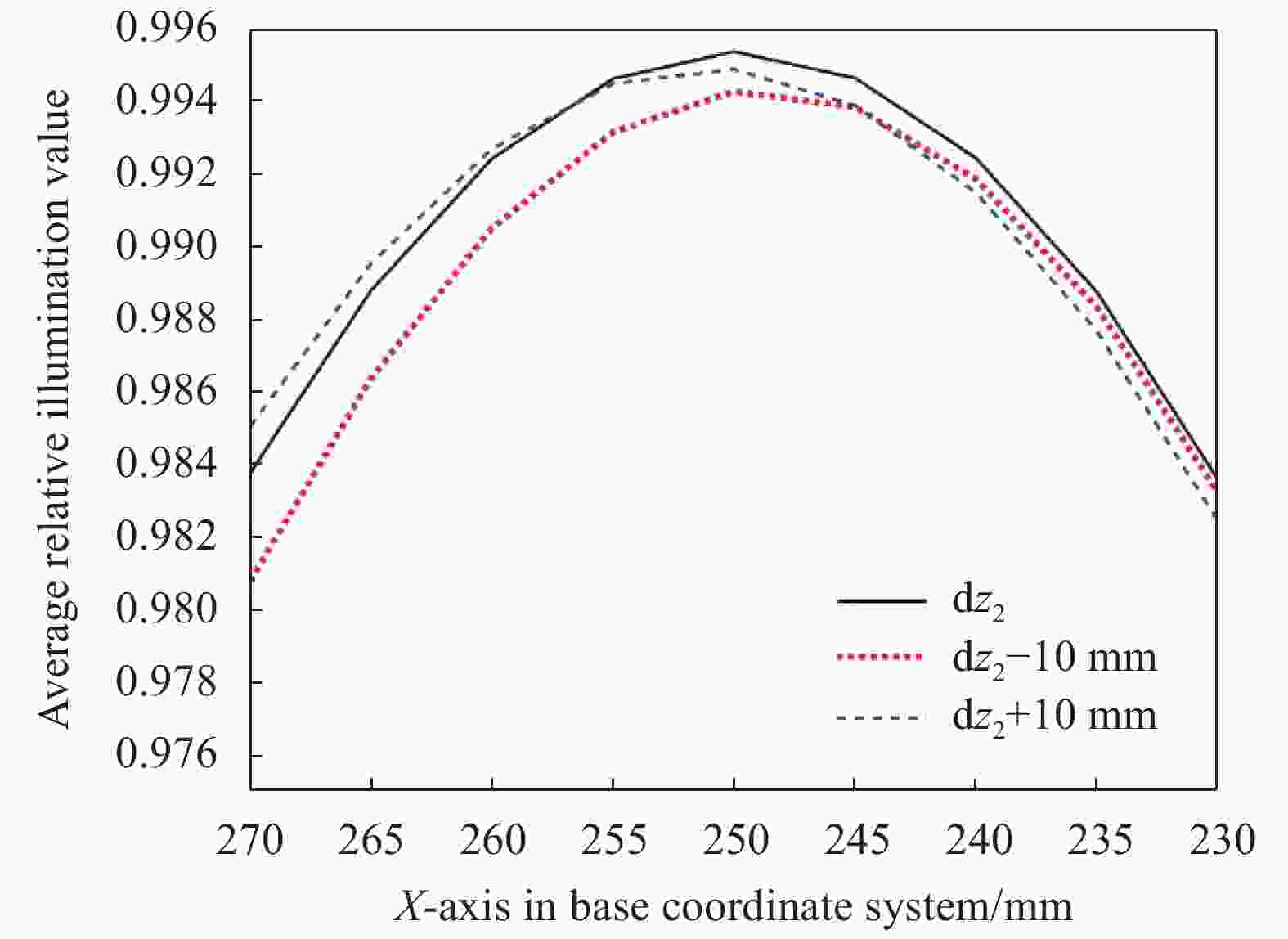
Figure 15. Illumination distribution along the X-axis when
${\rm{d}}{{\textit{z}}_2}$ changing by 10 mmParameter variation $ {\theta _1} - 1^\circ $ $ {\theta _1} $ $ {\theta _1} + 1^\circ $ $ f $ −1 086.9 −1 261 −1 115.6 Table 2. Evaluation function value corresponding to θ1
Parameter
variation$ {\theta _2} - 1^\circ $ $ {\theta _2} $ $ {\theta _2} + 1^\circ $ $ f $ −1 122.4 −1 261 −1 144.0 Table 3. Evaluation function value corresponding to θ2
Parameter variation $ {\rm{d}}{x_2} - 10\;{{\rm{mm}}} $ $ {\rm{d}}{x_2} $ $ {\rm{d}}{x_2} + 10\;{{\rm{mm}}} $ $ f $ −627.7 −1 261 −657.1 Table 4. Evaluation function value corresponding to dx2
Parameter variation $ {\rm{d}}{z_2} - 10\;{{\rm{mm}}} $ $ {\rm{d}}{z_2} $ $ {\rm{d}}{z_2} + 10\;{{\rm{mm}}} $ $ f $ −963.4 −1 261 −917.1 Table 5. Evaluation function value corresponding to dz2
-
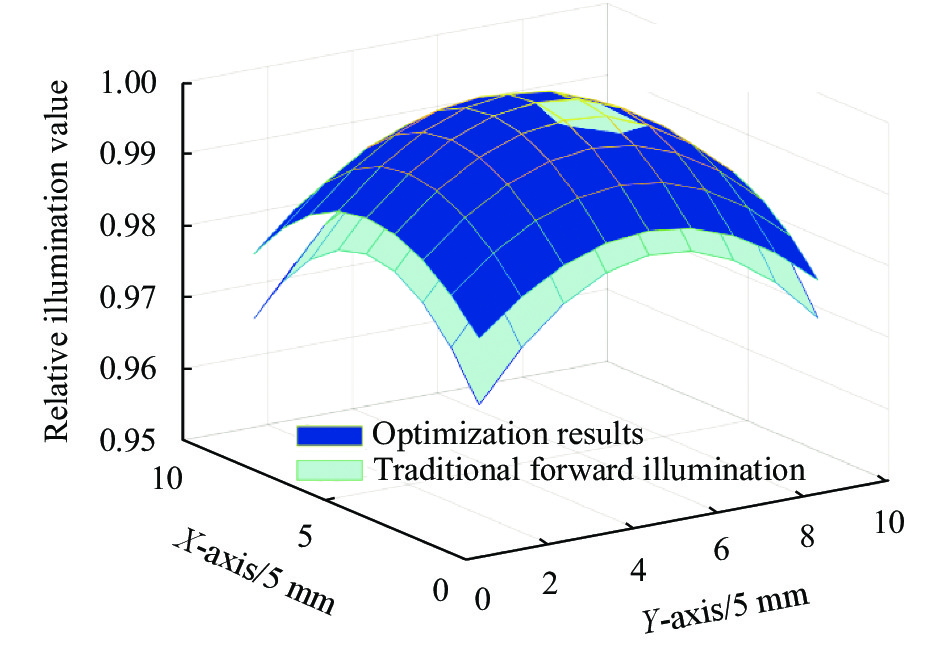
当前芯片封装质量视觉检测的工业应用中,光源通常采用正向照明方式。将传统正向照明的理论照度分布与文中优化后的理论照度分布作对比,如图16所示。其中,为使正向照明与文中优化方案具有相同的高度条件,正向照明采用的位姿参数为(
$ {\theta _1} = 90^\circ $ ,$ {\theta _2} = 11.86^\circ $ ,$ {\rm{d}}{x_2} = 223.95\;{{\rm{mm}}} $ ,${\rm{d}}{{\textit{z}}_2} = 322.18\;{{\rm{mm}}}$ )。从图16可以看出,传统正向照明下的平面照度分布与文中优化所得结果基本一致,但平面照度分布具有更高的梯度,照度变化更显著,不利于建立高质量目标图像采集所需要的、具有较高照度均匀度的照明系统,故文中提出的基于改进樽海鞘算法的视觉检测系统LED光源照度优化方法及条形LED阵列光源布置方案优于传统正向照明方案。
Figure 16. Comparison of optimization results and traditional forward illumination
-
针对当前视觉检测系统LED光源照度优化研究中存在的照度效果评价因素单一、照度优化方案通用性不足等问题,文中以芯片封装质量视觉检测为例,提出一种基于改进樽海鞘算法的LED光源照度优化方法。该方法在单个LED光源照度数学模型基础上,建立条形LED阵列光源照度数学模型,获取条形LED阵列在任意空间位姿与被测面的照度值;基于照度均匀度、照度梯度变化与对中度、平均照度、目标与背景区分度等因素建立平面照度效果评价函数;提出改进樽海鞘算法,通过改进算法收敛系数、速度、领导者与追随者等更新策略,增强搜索区域的多样性;对平面照度效果评价函数进行优化求解,获取具有最优照度效果的空间位姿参数。实验结果表明,文中提出LED光源照度优化方法所得目标区域理论照度均匀度大于98.78%,理论照度分布结果与实际测量所得照度分布结果基本一致,误差在5.57%以内,故提出方法优化目标合理,可用于获取光源最优位姿信息参数。文中研究成果可为工业产品机器视觉检测中的均匀照明提供一定的理论参考。
Illumination optimization method of LED light source for visual inspection system
doi: 10.3788/IRLA20210745
- Received Date: 2021-05-25
- Rev Recd Date: 2021-07-15
- Accepted Date: 2021-11-11
- Publish Date: 2021-12-31
-
Key words:
- illumination modeling /
- improved Salp swarm algorithm /
- optimization calculation /
- illumination uniformity /
- LED array
Abstract: To address the issues that the illumination effect evaluation elements were limited and the illumination optimization methods were lack of universality in current research of illumination optimization method of LED light source for visual inspection system, an illumination optimization method of LED light source for visual inspection system based on improved Salp swarm algorithm, taking visual inspection on chip package quality as example in this paper. A mathematical illumination model of single LED light source was established, based on which the mathematical illumination model of standard strip shape LED array was proposed to obtain the illumination values of the LED array in arbitrary spatial position and measured plane. The plane illumination effect evaluation function was constructed in comprehensive consideration of the illumination uniformity, the average illumination, the illumination gradient variation, the threshold reaching standard, the distinguishability of target and background area. An improved salp swarm algorithm (ISSA) was proposed to optimize the computing procedure of plane illumination effect evaluation function and obtain the spatial position parameters of optimal illumination effect. The update strategies of the convergence coefficients, the Salp speed, the leader and its followers’ position were improved, to enhance the diversity of area searching in ISSA. The experimental results show that based on the observation of the relative illumination distribution of the optimize area, the illumination distribution obtained by the propose method is basically consistent with the illumination distribution by actual measurement, the illumination uniformity of the target area is above 98.78%, and the maximum difference is within 5.57%. Therefore, the proposed method had a reasonable optimization objective and could be used to obtain the spatial position parameters of optimal illumination effect for visual inspection system.























































































































































































































































 DownLoad:
DownLoad: