







-
目前地震、泥石流等地质灾害频发,对人民群众生命财产造成巨大损失。如果能够实现对二氧化碳等气体浓度的精准检测,对于预防地质灾害有着重要的意义。实现气体检测的相关技术有很多,其中最常见的是基于朗伯-比尔原理的红外吸收光谱技术,其优点主要体现在反应快、精度高以及灵敏度高。但是该技术非常依赖高精度的温度控制,温度发生波动直接会影响气体浓度测量的准确性,对检测性能有较大影响[1-2]。因此,解决气体检测过程中的温度控制问题具有重要的现实意义。
传统PID方法存在着控制系统误差选取不合理、对于误差微分求取不准确、积分环节会有负面影响的问题,所以目前在气体检测系统应用中对于温度的控制算法有很多研究。模糊PID控制算法在气体检测系统中的温度控制上得以应用,能够达到无超调的效果,但检测系统温控箱内的气体温度从20 ℃加热到30 ℃的过程中达到稳态的时间达到了600 s,调节时间过长。这是因为虽然模糊控制具有一定的智能性,但模糊控制的完成需要确定精确的模糊控制规则,同时还要经历复杂的经验学习过程[3]。而采用分数阶PID方法对温控箱控温有着较理想的控制效果,调节时间相比于PID快了15%。然而,该方法非常依赖于系统温控箱的精确数学模型,目前,控制效果只能在实验室环境下保证,在外部环境下检测受到干扰后控制质量会显著变差,精度仅为±0.08 ℃[4]。而采用BP神经网络与传统PID结合的方法对温控箱进行温度控制,对环境有较强的适应性,受到干扰后5 min能够调整到目标温度,但仍有5.6%的超调[5]。目前,对于气体检测系统的温度精度和稳定性的要求越来越高,因此需要无超调、高精度以及稳定性高的控制算法来满足气体检测系统特殊需求[6-7]。
文中先从理论上介绍了LADRC的原理,然后通过仿真对比PID算法与LADRC算法的温度控制性能,最后通过实验对采用LADRC算法的温度控制系统进行验证。
-
LADRC主要由跟踪微分器(TD)、扩展状态观测器(ESO)和线性状态误差反馈控制器(LSEF)三部分组成,它们的结合能够有效减小温控系统的超调,并且将温控系统的外部干扰纳入内部总干扰,有较强的干扰抑制能力和适应性[8]。图1是LADRC的基本结构。
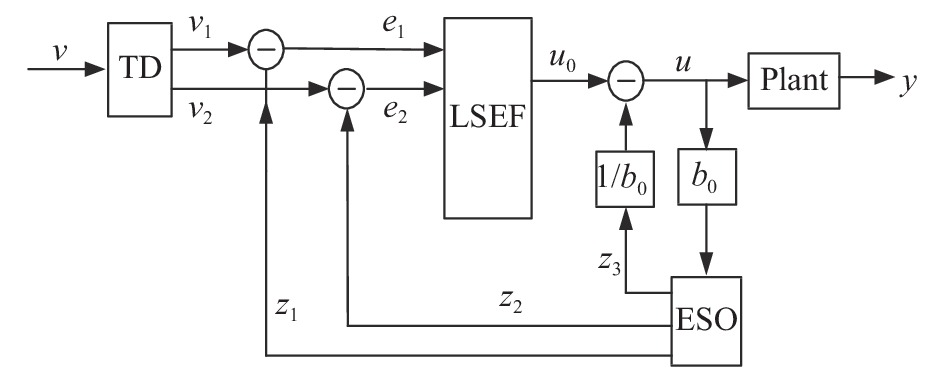
Figure 1. Photograph of LADRC controller structure
在图1中,v是温控系统的目标温度,y为温控系输出的实时温度,u0为LSEF计算输出的调整量,b0是温控系统已知控制量的增益,而u为控制器输出的调整量。LADRC不是直接计算温控系统的温度误差值,而是通过TD预先对目标温度安排过渡过程v1以及过渡过程的微分信号v2,这样能够很好地解决系统超调与响应时间的矛盾。ESO是LADRC的核心部分,具有干扰跟踪和补偿的作用。它不依赖于温控系统的精确数学模型,用温控系统的输出的实时温度y和控制器输出的调整量u来估计温控系统的状态和扰动,由它们作为ESO的输入信号,得到v1的跟踪信号z1、v2的跟踪信号z2和具有扰动补偿作用的信号z3。误差信号e1由TD的过渡过程v1和ESO的跟踪信号z1形成,e2由TD的过渡过程微分信号v2和ESO的跟踪微分信号z2形成。它们作为LSEF的输入信号,通过内部线性组合输出u0,再结合z3,用于改变TEC的输入电流,从而实现气体检测系统的温度控制。
为了能够实现对于温控系统的干扰跟踪和补偿控制,需设计TD、ESO、LSEF的控制算法。TD控制算法如公式(1)所示:
式中: e(k)为第k个采样时刻的偏差量;T为温控系统采样周期;r为决定跟踪速度的因子;h为滤波因子;fhan(e(k),v2(k),r,h)为离散时间优化控制综合函数,具体算法如下:
式中:δ为区间长度;sign(x)为符号函数;δ0,a,a0为调整参数。
扩展状态观测器ESO选择k时刻温控系统计算的调整量u(k)和温控系统输出的温度y(k)作为它的输入,算法实现如下:
式中:β1、β2和β3为调整参数;目标温度跟踪信号z1、目标温度微分信号跟踪信号z2分别对系统输出的实时温度及其微分信号起跟踪的作用;z3可以估计温控系统的扰动量给出,并能反馈给系统计算的温度调整量u;fal函数是幂函数,作用是防止出现高频振荡,具体算法为:
式中:α为幂参数,0 < α ≤1。LADRC线性状态误差反馈控制器的算法如公式(5)所示:
式中:e1为TD安排的过渡过程v1与其跟踪信号z1的误差;e2为过渡过程微分信号v2与其跟踪信号z2的误差,由它们作为线性反馈环节输入信号;β01和β02为LSEF的增益参数;u0为LSEF输出的调整量。
-
参数调整的是否合适直接能够影响温控系统的控制性能,整个LADRC控制器共包含8个参数,r、h、β1、β2、β3、b0、β01和β02。其中b0是与温控系统相关的常量参数,h为滤波因子较为固定。r参数足够大就可以一直保证TD部分有着较稳定的性能,因此较容易整定。综上所述,LADRC控制器的参数整定工作应主要集中于ESO部分的参数β1、β2和β3,和LSEF部分的参数β01和β02。高志强教授提出了基于系统带宽参数化算法的ESO参数简化整定策略[9]。基于该简化策略,对于离散型三阶线性扩张状态观测器而言,三个参数β1、β2和β3可被简化如下:
而β01,β02与传统PID中的比例系数和微分系数相似,调整时可以参考PID的整定方法,在调整时β1适当增大能够减小温控系统的超调,提高系统的调节速度,而选取合适的β2可以抑制超调现象。
-
首先采用COMSOL软件进行仿真分析,确定温控箱加热结构,同时在SIMULINK中选择LADRC算法和PID算法进行仿真对比,验证了LADRC算法具有无超调、调整时间快的优点。
-
COMSOL基于有限体积法,将计算域离散化为一系列控制体积,在这些控制体积上求解质量、动量、能量、组分等。将偏微分方程组离散为代数方程组,用数值方法求解代数方程组以获取流场解[10-11]。通用守恒方程如公式(7):
式中:V 为体积;A 为面积;
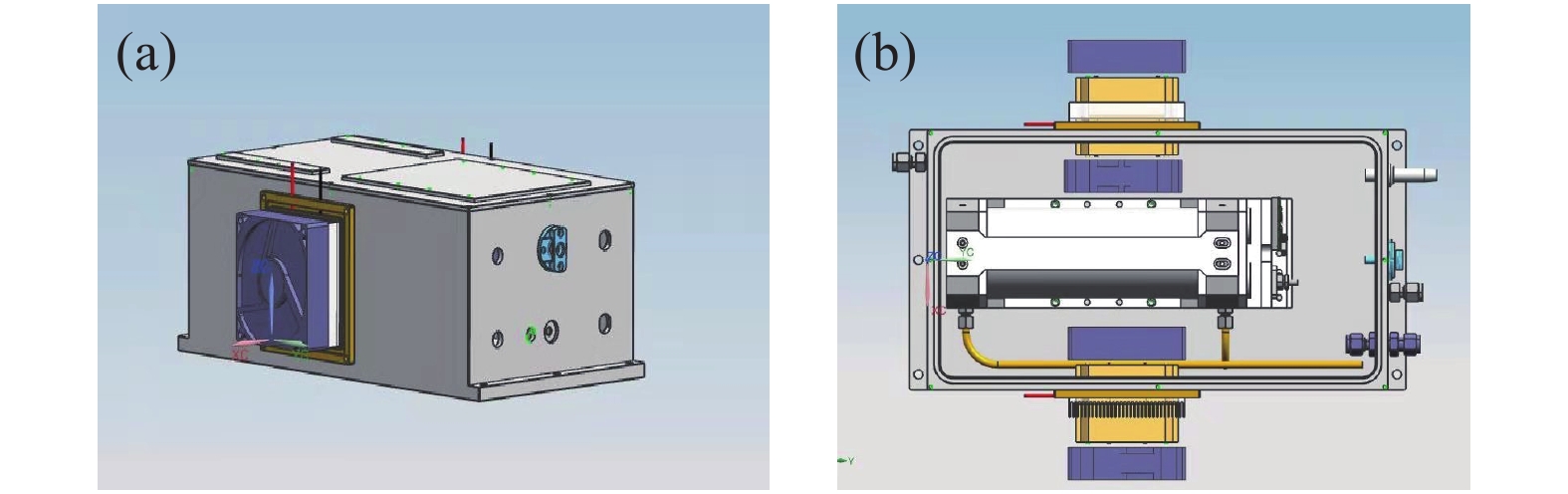
$\varGamma_{\phi}$ 为广义扩散系数;$\nabla $ 为那勃勒算子。温控箱可选的温控方案目前有TEC放置在温控箱前后、左右以及温控箱的四面,如图2所示。
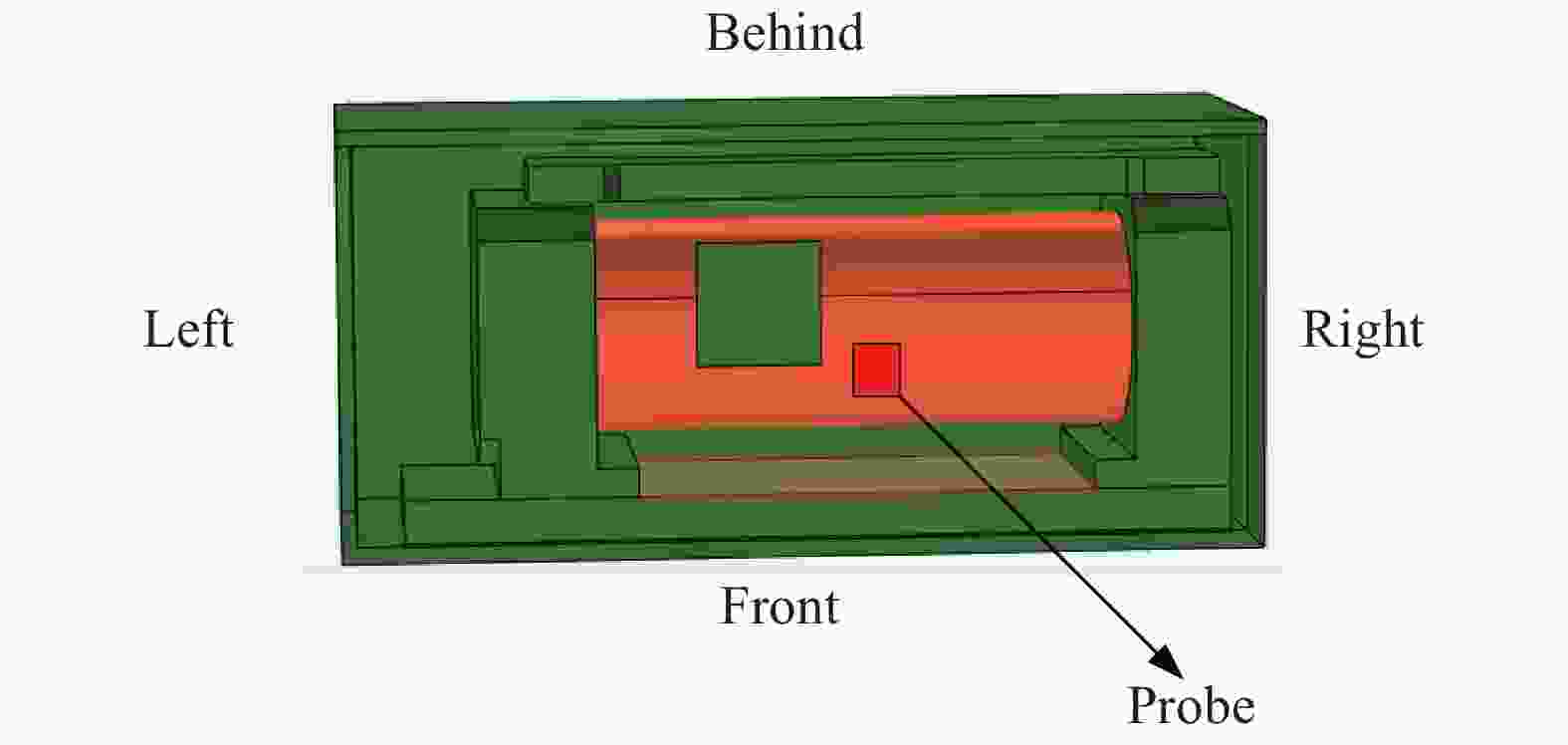
Figure 2. Photograph of temperature control scheme and probe
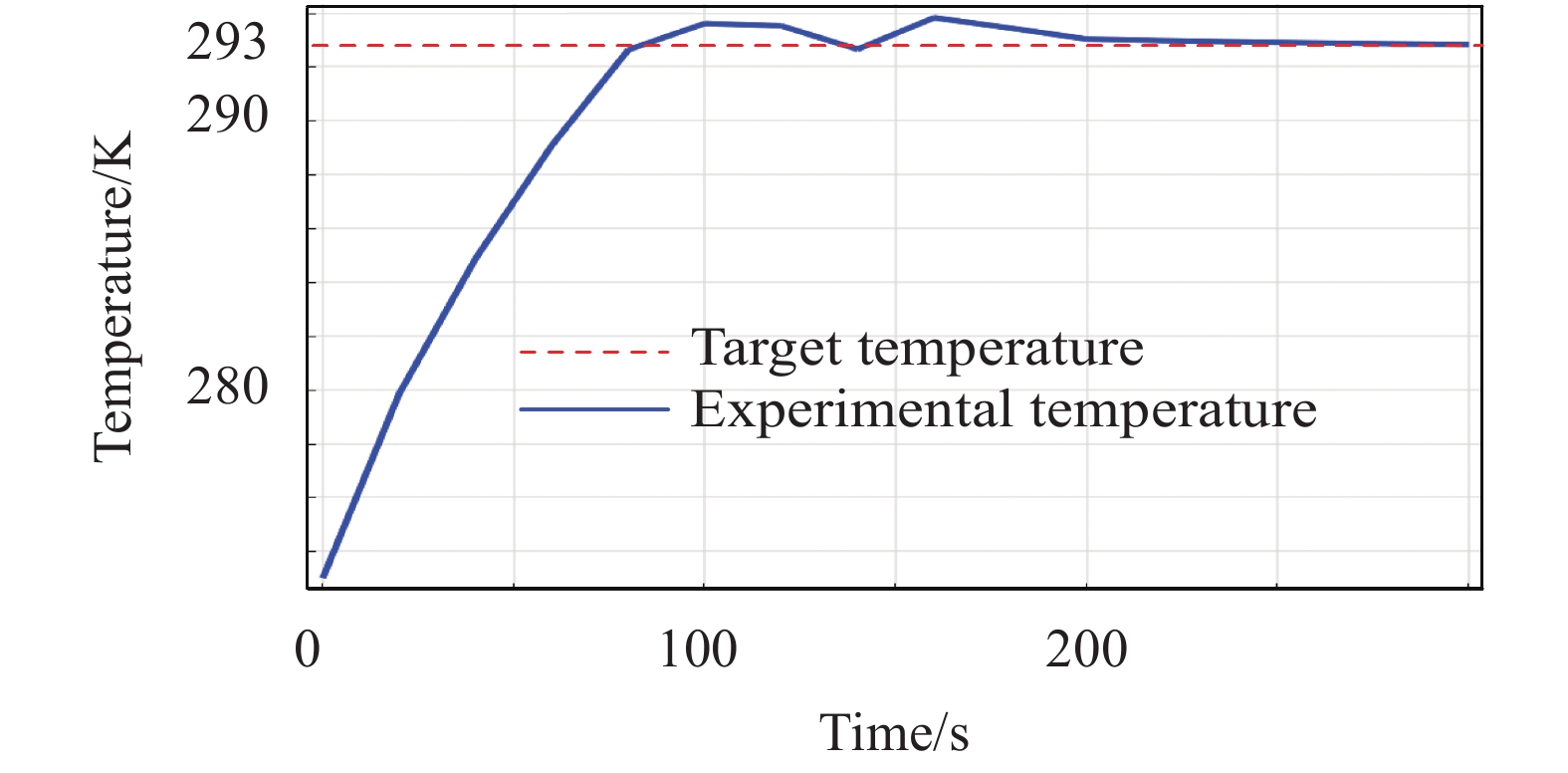
在气室中选取图2所示红点作为探针,探针为气室内一点,选取目的是比较不同温控方案的温控精度。在COMSOL中分别对以上三种不同温控方案进行仿真, 设定目标温度293 K,结果如图3~图5所示。

Figure 3. Left and right temperature control scheme curve
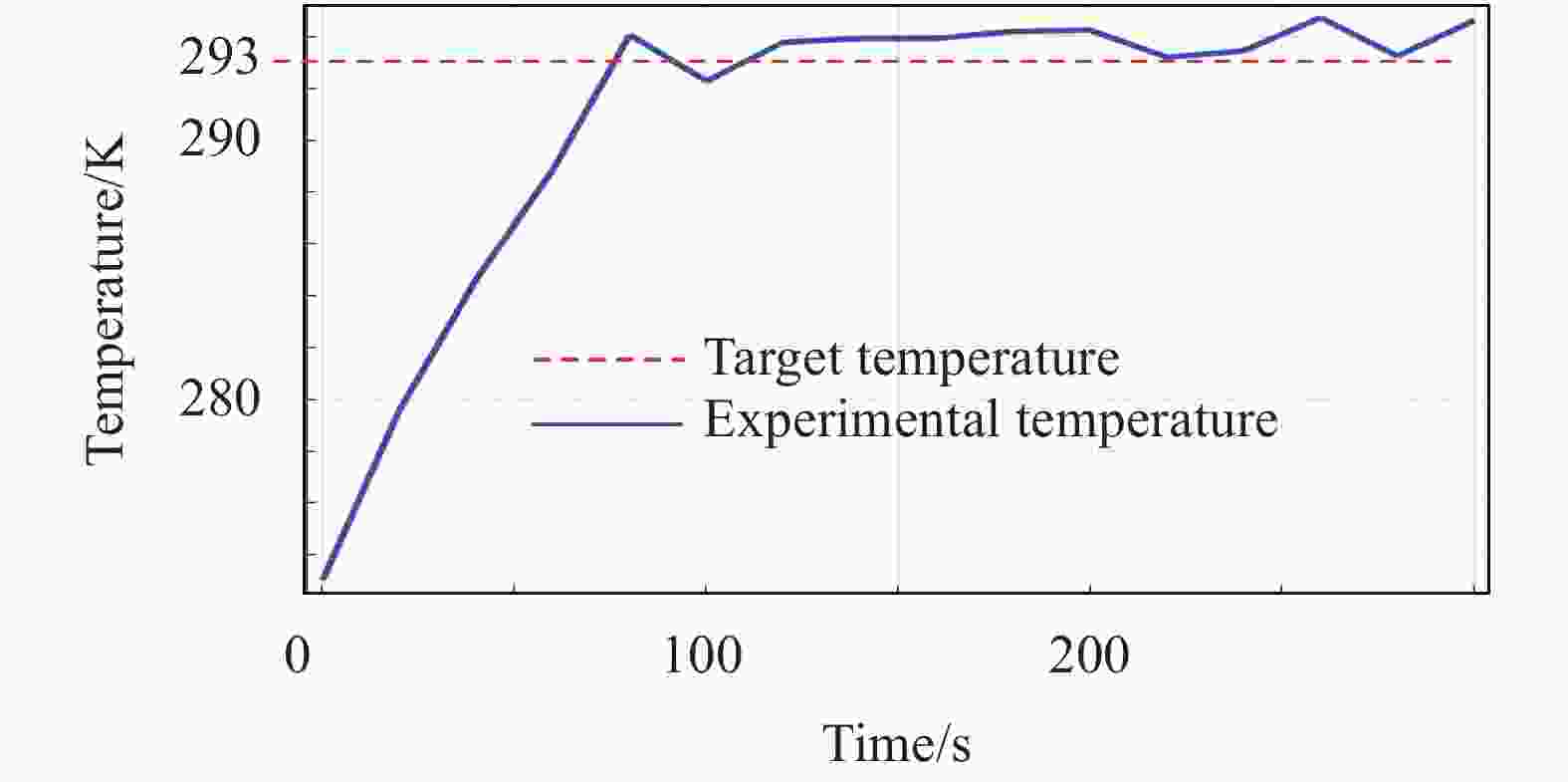
Figure 4. Four sides temperature control scheme curve

Figure 5. Front and behind temperature control scheme curves
如图3所示,采用左右结构的温控方案,温度波动较大达到了2.7 ℃,同时调节到稳定的时间为270 s;如图4所示,采用四面结构的温控方案,温度波动为2.3 ℃但调节时间为300 s。而图5所示前后结构的温控方案,温度波动仅为0.8 ℃,同时在210 s就达到了稳定。所以前后方案对于多通池温控效果最好,图6为最终系统温控箱的结构示意图。

Figure 6. Diagram of system structure
如图6所示,在温控箱前后放置TEC,同时在TEC上添加风扇更有利于热量传递,该结构可以有效保证温控箱进行高精度和快速响应的温度控制,从而满足红外气体检测的使用需求。
-
为了验证LADRC的控制性能,利用SIMULINK采用传统 PID 算法与其进行仿真比较。 在SIMULINK中设定从起始温度19.8 ℃加热到目标温度32 ℃,分别采用PID和LADRC算法进行仿真实验,实验结果如图7所示。
红色曲线代表PID算法温控结果,深蓝色曲线代表LADRC算法温控结果。在温度控制过程中PID算法表现出明显超调,需经过250 s的调整时间后达到稳态。而LADRC算法只需160 s调整后达到稳定状态,并且没有出现超调。LADRC具有无超调、调整时间快的优点,其动态性能明显优于PID控制。在此过程中LADRC扩张状态观测器ESO中目标温度微分信号及其跟踪信号的结果如图8所示。
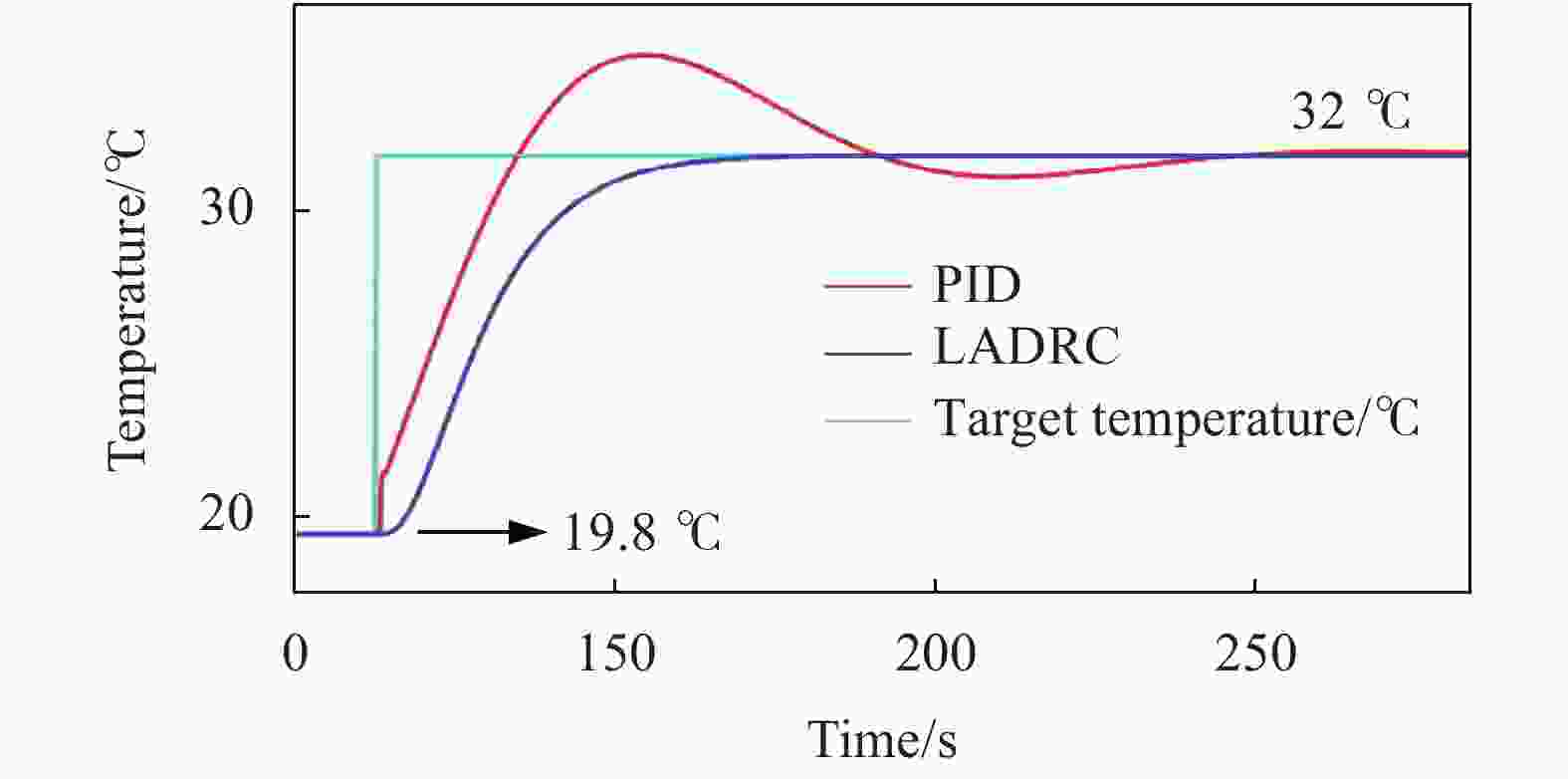
Figure 7. Control performance comparison between LADRC and PID
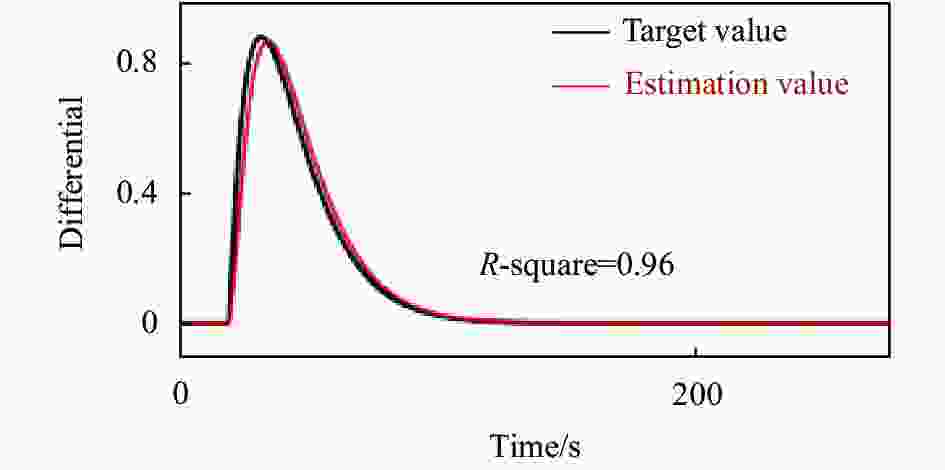
Figure 8. Differential signal tracking curves
图8中黑色曲线为设定过渡过程的微分信号,红色曲线为ESO对其跟踪的效果。ESO为实际估计部分,直接能够体现控制器的性能,R方值为0.96,表明实际曲线与目标值曲线相关程度非常好,两线重合度较高,说明LADRC控制器控制效果较好[12-13]。
-
气体检测温度控制系统由液晶显示屏、单片机、数模转换模块(A/D)、TEC驱动电路、温度传感器等组成,如图9所示。
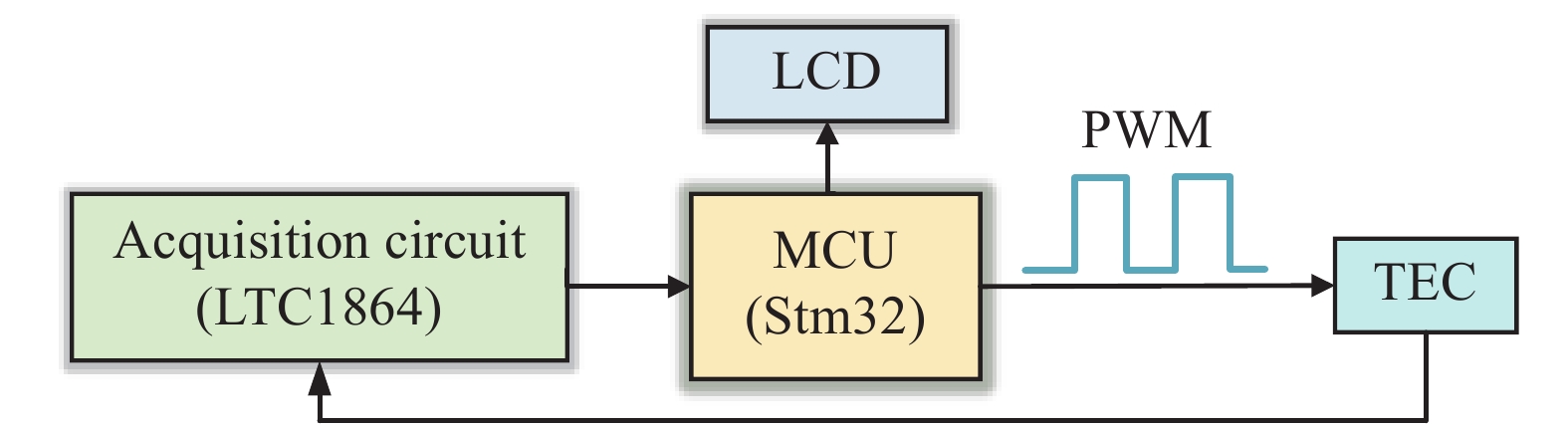
Figure 9. Photograph of hardware systerm composition
温度采集电路利用A/D模块实时采集气室的温度,然后通过SPI通信协议传输至单片机,在单片机中通过LADRC算法将采集的温度值与设定值进行比较后得到最佳控制量,调整对应的PWM占空比驱动TEC,从而实现对气室的实时目标温度控制。
-
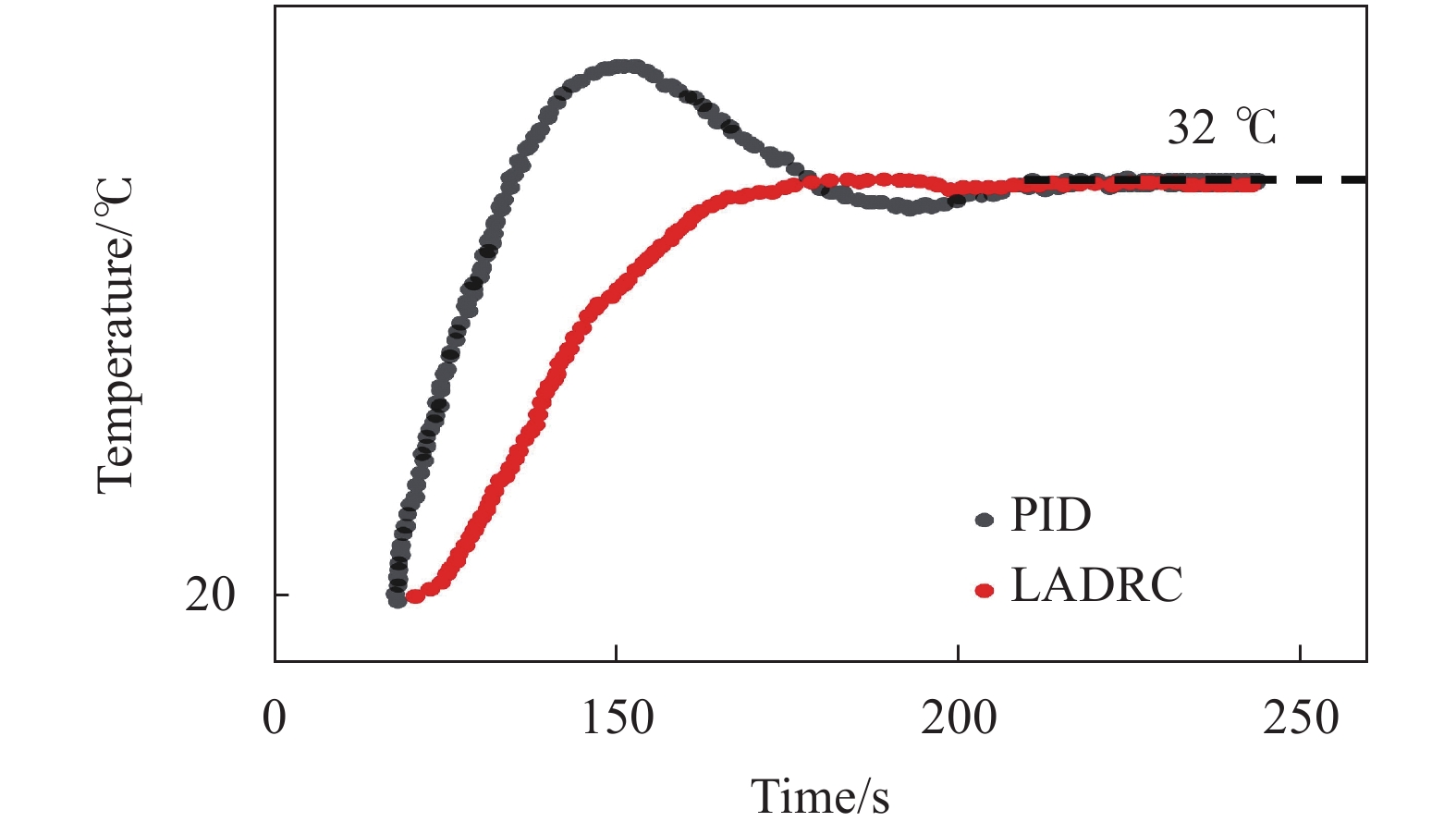
在实验室环境条件下对两种算法进行温控超调对比实验,温控曲线如图10所示,黑色曲线代表温控过程中PID的温控结果,红色曲线代表LADRC的温控结果。

Figure 10. Overshoot comparison between LADRC and PID
实验室温度为19.8 ℃,在该温度下设定温控箱温控目标温度32 ℃,PID算法温控曲线呈先上升后下降的趋势,均超过目标温度32 ℃,最后达到稳定,有明显超调。LADRC算法温控曲线上升平缓,无超调,快速调节到目标温度32 ℃并达到稳定状态。
-
以32℃为目标温度进行长时间测量,测量时间为400 s,采集样本点2 000个,结果如图11所示。其中蓝色曲线代表PID的温度控制稳定性,红色曲线代表LADRC的温度控制稳定性。

Figure 11. Stability comparison between LADRC and PID
PID算法下的温度标准差为0.1396 ℃,而LADRC算法下的温度标准差仅为0.0357 ℃,表明LADRC算法比PID算法有着更高的控制精密度。通过上述实验证明LADRC算法具有高精度、无超调的优点,其控制性能明显优于PID算法。
-
对温控箱进行环境外部扰动干扰实验,结果如图12所示,黑色曲线代表LADRC算法的温度控制结果,红色曲线代表PID算法的温度控制结果。

Figure 12. Response time comparison between LADRC and PID
在受到环境外部扰动后,PID算法下的温度受到了较大干扰,有明显的下降趋势,从初始的32 ℃最低温度降到了29.8 ℃,且调整5 min后才回到目标预设温度,而LADRC算法下的温度从32 ℃最低降到31 ℃,调整时间仅为4 min,相比较之下,LADRC比PID有更强的抗干扰性能和更快的响应时间。
-
针对传统采用PID算法的温度控制系统存在超调、响应时间慢、精度低的问题,采用线性自抗扰算法,控制温度标准差达到0.0357 ℃,响应时间相比PID算法快了1 min,实现了精度高、无超调、抗干扰的目的。下一步拟计划采用系统模型补偿方法降低ESO的观测负担,这样能够解决传统ESO在复杂环境下由于扰动量大而造成精度降低的问题,使气体检测系统能够在更复杂的环境下稳定工作,为气体浓度及同位素丰度检测提供了广阔的应用前景。
Research on high precision temperature control system using linear auto disturbance rejection technique
doi: 10.3788/IRLA20210813
- Received Date: 2021-11-02
- Rev Recd Date: 2021-11-22
- Accepted Date: 2021-11-23
- Publish Date: 2023-02-25
-
Key words:
- infrared gas detection /
- temperature control /
- finite element analysis /
- linear auto disturbance rejection algorithm /
- semiconductor cooler
Abstract: With the development of photoelectric measurement technology, infrared gas detection technology is widely used in many fields. Temperature has an important influence on the detection of gas concentration and isotopic abundance. The traditional temperature control system using proportional integral differential (PID) control algorithm has the disadvantages of overshoot, slow response time and low precision. Firstly, COMSOL software is used to determine the heating structure by finite element analysis. Secondly, the STM32 single chip microcomputer is used to collect real-time temperature data through 16 bit AD chip LTC1864. Finally, the linear auto disturbance rejection algorithm (LADRC) is used to adjust the PWM wave that achieve the high-precision and real-time dynamic adjustment of the system temperature by controlling the semiconductor cooler (TEC). Under the temperature of 19.8 ℃ condition, an temperature control experiments with a target temperature of 32 ℃ is carried out. The results show that the standard deviation of temperature fluctuation is 0.0357 ℃. Compared with the temperature control system using PID algorithm, it has the advantages of no overshoot, fast response time and high precision.











 DownLoad:
DownLoad: