







-
天文学、天体物理学的重要科学成果高度依赖望远镜的观测。拼接镜面、主动光学和自适应光学等技术的出现使得建造更大口径光学望远镜成为现实。目前,国际上10 m级望远镜已有多台,并正在建造数台超大口径的光学望远镜,如30 m望远镜(TMT)、巨型麦哲伦望远镜(GMT)及欧洲极大望远镜(E-ELT)。与国际相比,目前我国已建成的大望远镜主要有大天区面积多目标光纤光谱天文望远镜(LAMOST)和两台2 m级光学望远镜,即兴隆2.16 m望远镜和丽江2.4 m望远镜。当前我国正在建造多台2 m级望远镜及4 m级望远镜[1-2];清华大学也正在筹备6.5 m宽视场巡天望远镜(MUST)[3]。
大口径望远镜的光学系统以主次两镜系统为主,卡塞格林系统是最常用的光学系统。广义的卡塞格林系统通常有三种设计:卡塞格林式、Ritchey-Chretien式和主镜球面系统[4]。在两镜中间增加一平面反射镜即可增加焦点。三镜的功能主要是光路折转,将来自次镜的光束折转至耐焦、折轴焦点、Coude焦点等。除光路折转功能外,为实现望远镜的更好成像,三镜系统在逐渐发展新功能,如波前校正等。在SOAR望远镜中,三镜具备波前整体倾斜校正的功能,提供频率50 Hz的快速控制,用来补偿大气的扰动,配合望远镜主动光学系统,实现更好的成像质量[5]。随着望远镜口径越来越大,为提高望远镜的使用效率,需对望远镜的焦点进行充分利用,亦使望远镜具备多焦点的功能。因此能够实现自动切换的三镜作为转换焦点、提高大口径望远镜功能的关键元件,其作用越来越受到关注[6]。
文中针对丽江2.4 m望远镜的三镜(M3)系统进行设计。该望远镜卡焦平台配备了多个观测终端,以实现不同的观测任务[7]。由于卡焦平台安装空间有限,以及有挂载现代重型科学仪器的迫切需求,文中设计了耐焦卡焦自动切换系统,在观测时可以快速实现焦点间的切换,以挖掘出该望远镜更大的观测潜力。介绍了切换系统的组成结构及实现方法,并进行了理论定位精度分析和有限元分析,最后通过实验验证了切换系统的设计满足指标要求。
-
丽江2.4 m望远镜采用卡塞格林光学系统[8],如图1所示,具备两个耐焦和一个卡焦。M3通过镜室及支撑叶片等装配在光轴中心位置,此前只能通过手动装拆来实现焦点切换。为了保留卡焦终端的同时并充分利用好耐焦,需要M3能够快速地实现焦点切换。该切换系统的工作原理是:在耐焦仪器观测时,M3切换到光轴中心,且与光轴成45°,将来自次镜的光路折转到耐焦,同时M3还需绕光轴旋转180°,以实现不同耐焦切换;当使用卡焦观测时,M3需要位姿变换来让出卡焦光路通道,为了不影响卡焦仪器进行观测,此时M3需在图1所示的阴影区内。
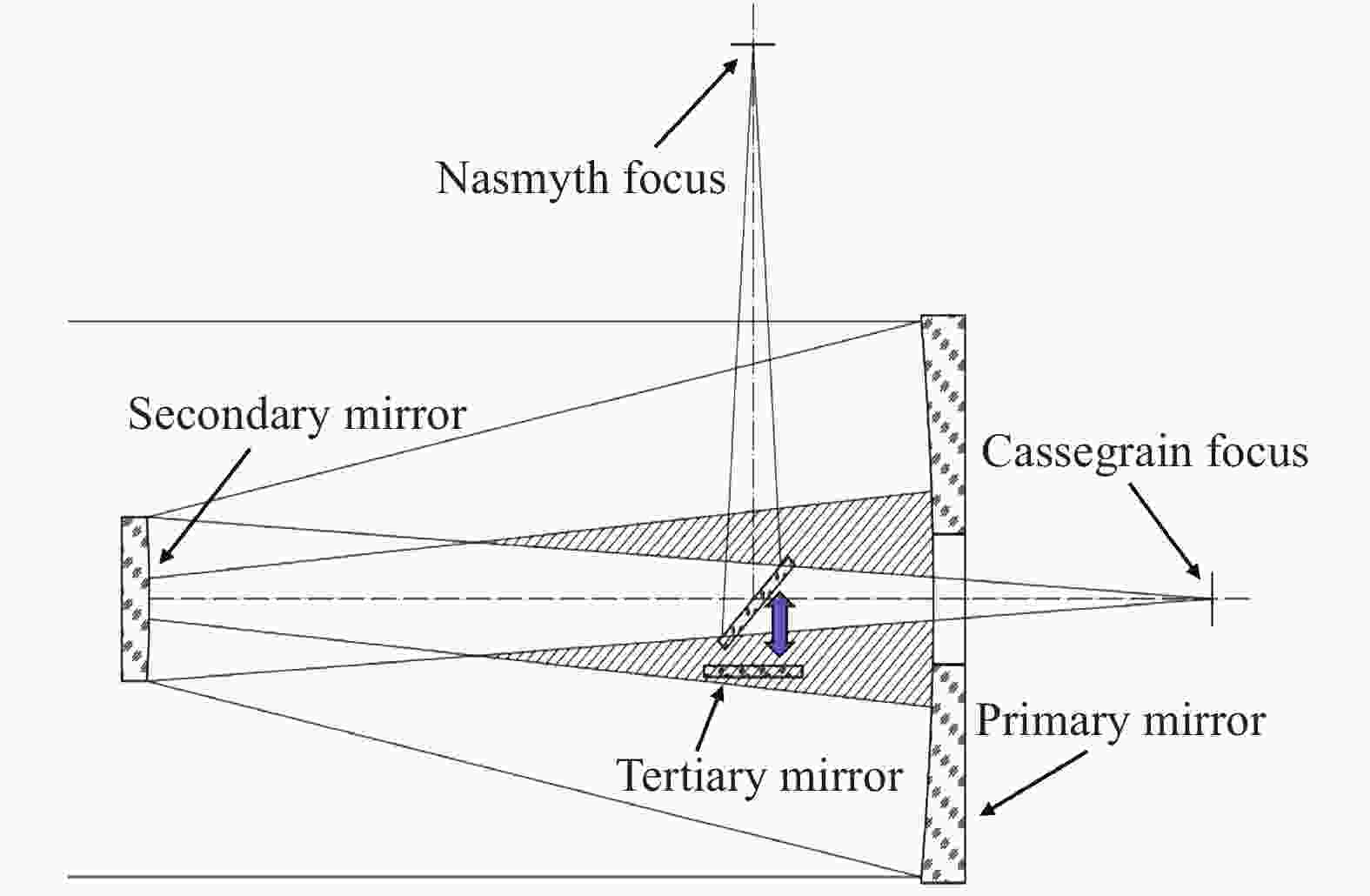
Figure 1. Cassegrain optical system
-
切换系统通过支撑叶片安装在望远镜的中间块上,当使用卡焦观测时,来自次镜的光束将穿过切换系统,到达成像焦面。为实现在卡焦和两个耐焦之间的切换,M3需要实现整体“旋转”、角度“俯仰”及“平移”三个动作。
切换系统由三个主要部分组成,分别为方位轴系、俯仰轴系及平移机构,其余组成包括遮光罩、支撑叶片,各运动轴系的限位等结构,如图2所示。在使用望远镜观测时,可以通过软件实时校正单次的镜面角度微小偏差,多次的定位误差过大会影响望远镜的观测。因此,运动机构的重复定位精度(RMS)是重要的设计指标,其技术指标如表1所示。

Figure 2. Switching system. (a) State of Nasmyth focus; (b) State of Cassgrain focus
Item Repeated positioning precision Azimuth/(″) 2 Altitude/(″) 2 Translation/mm 0.02 Table 1. Technology parameters
图2(a)所示为望远镜耐焦观测时切换系统的状态,图2(b)所示为卡焦观测时的状态。从耐焦向卡焦切换的方法是:通过俯仰轴系的运动,将M3装配体翻转至与光轴平行,然后平移机构将装配体移动到光路阴影区内,使其进入卡焦观测状态;从卡焦向耐焦切换的方法为:通过平移机构将M3装配体运动到光轴中心位置,然后驱动俯仰轴系将M3翻转至与光轴成45°夹角,此时望远镜便进入耐焦观测状态。
方位轴系的旋转运动通过齿轮啮合传动来实现两个耐焦之间的切换。方位轴系采用转盘轴承,将方位轴与转盘相连,转盘上安装有俯仰轴系以及平移机构等装配体。当使用耐焦观测时,为了使切换系统的重心位于望远镜中心轴线上,方位轴系设有配重,使切换系统达到力矩平衡,结构如图3所示。

Figure 3. Components of the azimuth structure and translation stage
俯仰轴系依托于系统装配体两侧的轴承座,实现M3角度翻转。M3支撑镜室的两侧装有大齿轮,同时与俯仰轴连接。俯仰轴与轴承座之间用双列调心球轴承连接,施加适当预紧力以提高轴承的刚度以及轴系的回转精度。装配体两侧设置配重,以实现轴系的力矩平衡。俯仰轴系采用齿轮啮合传动,通过位于镜室两侧的伺服电机驱动小齿轮,实现角度翻转,结构如图4所示。

Figure 4. Components of altitude structure
平移机构实现M3装配体在光轴与阴影区之间的位置变动。由伺服电机驱动齿轮啮合传动,并拖动两侧蜗轮蜗杆同时工作,使精密滚珠丝杠转动,实现M3装配体在直线导轨上的平移,以进行装配体的位置切换,结构如图3所示。
为了消除齿轮啮合间隙及运动部件之间的间隙带来的传动误差,采用双电机消隙及弹簧消隙机构。方位轴系和俯仰轴系均采用双电机消隙,通过控制两个电机的力矩分配,使大齿轮在启动和换向过程中始终受到偏置力矩,小齿轮分别啮合在大齿轮相反的啮合面,保证大齿轮在换向时不会在齿轮的齿隙之间来回游动[9]。平移机构设置弹簧消隙机构,在M3装配体的两侧设有压缩弹簧,安装位置见图3。当M3装配体运动到光轴中心位置时,弹簧力大于导轨滑块和丝杠螺母之间的摩擦力,以消除运动件的间隙,保证平移机构到位时的精度。
控制计算机通过以太网接收望远镜观测控制系统(OCS)的指令,并通过运动控制器实现方位轴系、俯仰轴系及平移机构之间多个伺服电机的协调控制。三个轴系分别通过编码器及光栅尺进行角度与位置的检测,并反馈到控制器中,实现闭环回路控制。同时系统具有故障诊断处理和安全保护功能。控制系统如图5所示。
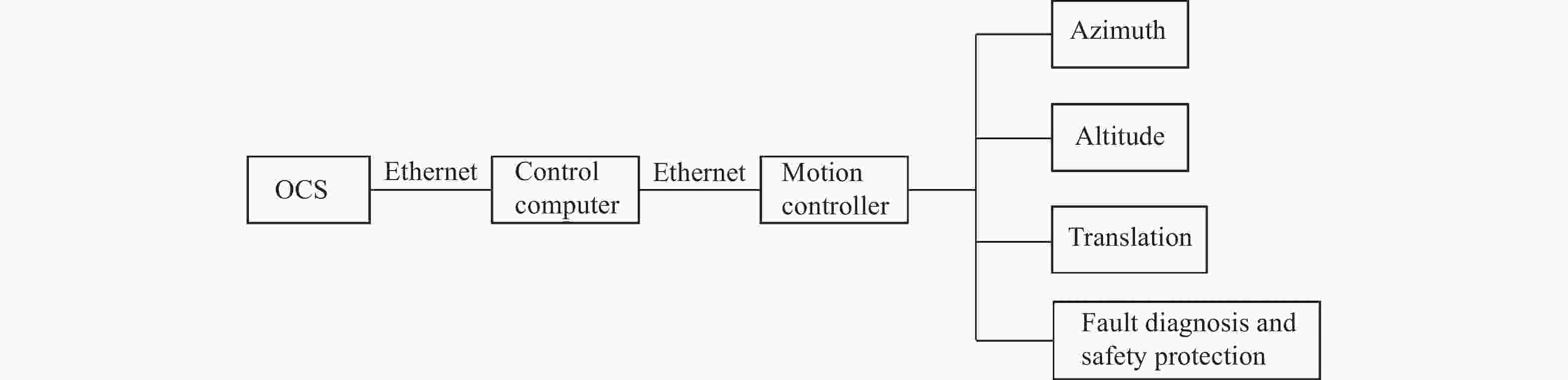
Figure 5. Control system
-
方位轴系由双电机驱动小齿轮,再与中间大齿轮相啮合。旋转部件为施加预紧的转盘轴承,通过编码器检测角度。双电机消隙驱动装置消除了齿轮传动的末级齿隙,因此方位轴系的回转定位误差主要由角度编码器定位误差及伺服电机分辨率不足造成角度偏差构成,其计算公式如下:
式中:λ为方位轴系定位误差;
$ {\mathrm{\lambda }}_{1} $ 为编码器的定位误差,该方位轴系选用了29位绝对式编码器,根据选型手册,细分误差${\mathrm{\lambda }}_{1}=\pm 0.04\mathrm{〞}$ ;$ {\lambda }_{2} $ 为伺服电机因分辨率造成的角度偏差,电机精度为1′,其中减速机的减速比$ {i}_{1}=10 $ ,齿轮的传动比$ {i}_{2}=7.58 $ ,可得${\lambda }_{2}=0.79\mathrm{〞}$ 。将各数值代入公式(1)中,得到方位轴系的理论定位误差为
$ \mathrm{\lambda }=0.791\mathrm{〞} $ 。由此可见,采用该型号的绝对式编码器在重复定位时精度足够好,对定位误差影响极小。俯仰轴系通过齿轮啮合来实现角度的翻转,由角度编码器检测角度。轴系两侧的轴承均采用双列调心球轴承并施加预紧。同样的,双电机消隙驱动装置消去了齿轮啮合的末级齿隙,俯仰轴系的定位误差来源主要由俯仰轴与两侧轴承座的同轴度误差、装配误差及变形误差、编码器的位置误差及伺服电机角度误差构成[10]。其轴系的最大误差计算公式如下:
式中:
$ \mathrm{\theta } $ 为俯仰轴系的最大定位误差;$ {\mathrm{\theta }}_{1} $ 为轴系的最大角运动误差;$ {\mathrm{\theta }}_{2} $ 为随机误差,一般取值${\mathrm{\theta }}_{2}\leqslant 0.3\mathrm{〞}$ ;$ {\mathrm{\theta }}_{3} $ 为编码器的位置误差,根据选型手册,取值${\mathrm{\theta }}_{3}\leqslant 0.4\mathrm{〞}$ ;$ {\theta }_{4} $ 为俯仰轴系所用伺服电机因分辨率而引起的角度偏差,电机精度为1′,减速机的减速比$ {i}_{1}=20 $ ,齿轮的传动比$ {i}_{2}=4.21 $ ,计算可得${\theta }_{4}=0.71\mathrm{〞}$ 。式中:ε为rad单位换算成(″)的转换系数,取值2×105;L为轴系两支点之间的距离;
${k}$ 为轴承的径向跳动;${{p}}_{{z}}$ 为支撑轴的同轴度误差;${{p}}_{{k}}$ 为两端轴承座的同轴度误差;${m}$ 为轴系的装配间隙误差。在这个切换系统中,上述参数取值如下:L=556 mm;${k}$ =0.002 mm;${{p}}_{{z}}$ =0.002 mm;${{p}}_{{k}}$ =0.002 mm;${m}$ =0.002 mm,计算可得${\mathrm{\theta }}_{1}=1.80\mathrm{〞}$ 。将上述各数值代入公式(2)中,可得到俯仰轴系的最大定位误差为
$\mathrm{\theta }=2.0\mathrm{〞}$ 。平移机构由于压缩弹簧消去了直线导轨滑块及滚珠丝杠传动间隙引入的误差,因此造成定位误差的来源主要取决于齿轮啮合间隙、蜗轮蜗杆啮合间隙、光栅尺的定位误差以及装配体安装误差等造成的随机误差[11],计算公式如下:
式中:
$ {{\alpha }}_{1} $ 为齿轮引起的误差;$ {{\alpha }}_{2} $ 为蜗轮蜗杆引起的误差;$ {\mathrm{\alpha }}_{3} $ 为光栅尺的定位精度,根据选型手册,$ {\mathrm{\alpha }}_{3}=3\;{\text{μm}} $ ;$ {\mathrm{\alpha }}_{4} $ 为零件装配等造成的随机误差,根据工程经验,其值取5 μm。齿轮引起的定位误差为:
式中:s为滚珠丝杠的导程,s=5 mm;
$ {\mathrm{\tau }}_{1} $ 为齿轮啮合间隙,根据工程经验,取值$ {\mathrm{\tau }}_{1}=5\;{\text{μm}} $ ;m为齿轮模数,m=1;Z为齿数,Z=62。计算得,$ {\mathrm{\alpha }}_{1}=0.13\;{\text{μm}} $ 。蜗轮蜗杆引起的定位误差为:
式中:
$ {{m}}_{1} $ 为蜗轮的模数,$ {{m}}_{1}=1.25 $ ;$ {{Z}}_{2} $ 为蜗轮的齿数,$ {{Z}}_{2}=48 $ ;$ {\mathrm{\tau }}_{2} $ 为蜗轮蜗杆的啮合间隙,此处取值$ {\mathrm{\tau }}_{2}=4\;{\text{μm}} $ 。计算得,$ {\mathrm{\alpha }}_{2}=0.11\;{\text{μm}} $ 。将上述各计算数值代入公式(4)中,得到平移机构的最大定位误差为
$ \mathrm{\alpha }=5.83\;{\text{μm}}\mathrm{。} $ -
利用Ansys软件对整个系统进行静力学分析和模态分析,并对整个系统进行结构优化。材料的选用需考虑经济成本、力学性能、机械加工性能及材料稳定性等,为了满足系统最终成像的效果,不仅要保证选用的材料有较大的比刚度,还需考虑不同材料之间的热膨胀系数不宜相差过大,否则会引入局部应力,影响望远镜最终成像[12-13]。表2所示为切换系统中采用的主要材料及其性能参数。
Material Density/g·mm−3 E/MPa Poisson ratio λ/W·m−1·K−1 α/K Q235 7.86 212000 0.288 43 11.1×10−6 40Cr 7.82 211000 0.277 44 12×10−6 45 7.81 200100 0.26 48 11.59×10−6 Zerodur 2.54 96000 0.24 1.6 0.1×10−6 2A12 2.9 141000 0.33 155 23.2×10−6 4J36 8.1 150000 0.29 10.4 1.6×10−6 Lead 11.34 17000 0.42 34.8 29.3×10−6 Table 2. Material properties of switching system
-
建立有限元模型,对不同的组件赋予材料属性,采用实体单元划分网格。对于方位轴系及俯仰轴系中的轴承分别进行简化,去除滚子部分,建立弹簧单元,模拟滚子处作用力[14]。通过弹性力学中接触刚度理论计算出轴承的刚度,在有限元模型中采用数值模拟轴承模型,可简化分析的复杂性[15]。仿真模型中支撑叶片的端部固定约束,与实际切换系统装配在望远镜上保持一致,并使切换系统的有限元模型仅受重力作用。图6(a)所示为望远镜在使用耐焦观测时,镜筒指向天顶,在重力的作用下,切换系统的最大下沉量为0.04 mm,所处位置在俯仰轴系的配重块及支架;图6(b)所示为镜筒指向水平时的切换系统的静力学仿真分析云图,在仅受重力的作用下,切换系统的最大下沉量为0.24 mm,所处位置在俯仰轴系的配重块及支架。

Figure 6. Statics simulation
当望远镜在跟踪天体时,M3切换系统随高度轴转动,受重力的影响,M3镜面相对于理想反射面会有角度的扭转。当望远镜的高度轴绕图6(a)所示的X轴从水平到天顶转动时,M3的镜面角度偏差数据通过计算,如图6(c)所示。望远镜的高度轴从水平指向天顶的过程中,M3镜面与XZ平面的偏差角逐渐变大,而与YZ平面的偏差角逐渐变小。在整个天体跟踪转动过程中,相比于理想情况下的光路折转45°夹角,M3镜面的最大偏转角为15.6″。望远镜在进行观测跟踪天体时,可以通过软件程序进行实时的校正,不影响正常观测使用。
丽江2.4 m望远镜的三镜为八边形平面镜,尺寸为515 mm×235 mm×50 mm,质量约为19.6 kg。通过有限元分析可得到反射镜在仅受重力作用时底支撑及两个方向侧支撑时的面形。从仿真计算模型中提取出镜面节点变形参数,并通过最小二乘法平面拟合去除刚体位移,得到最终的使用面形。由表3可知,在不同方向的支撑下,镜面RMS及PV值均较为理想,RMS值小于λ/60 (λ=632.8 nm)。
Item PV/nm RMS/nm Axial support 13.717 3.207 Lateral support-1 16.578 2.247 Lateral support-2 16.582 1.373 Table 3. PV and RMS values under different support
-
模态分析是动力学分析的基础,即求模型的固有振动频率及振型。对切换系统整体进行分析,图7所示为模型的前四阶模态振型云图。
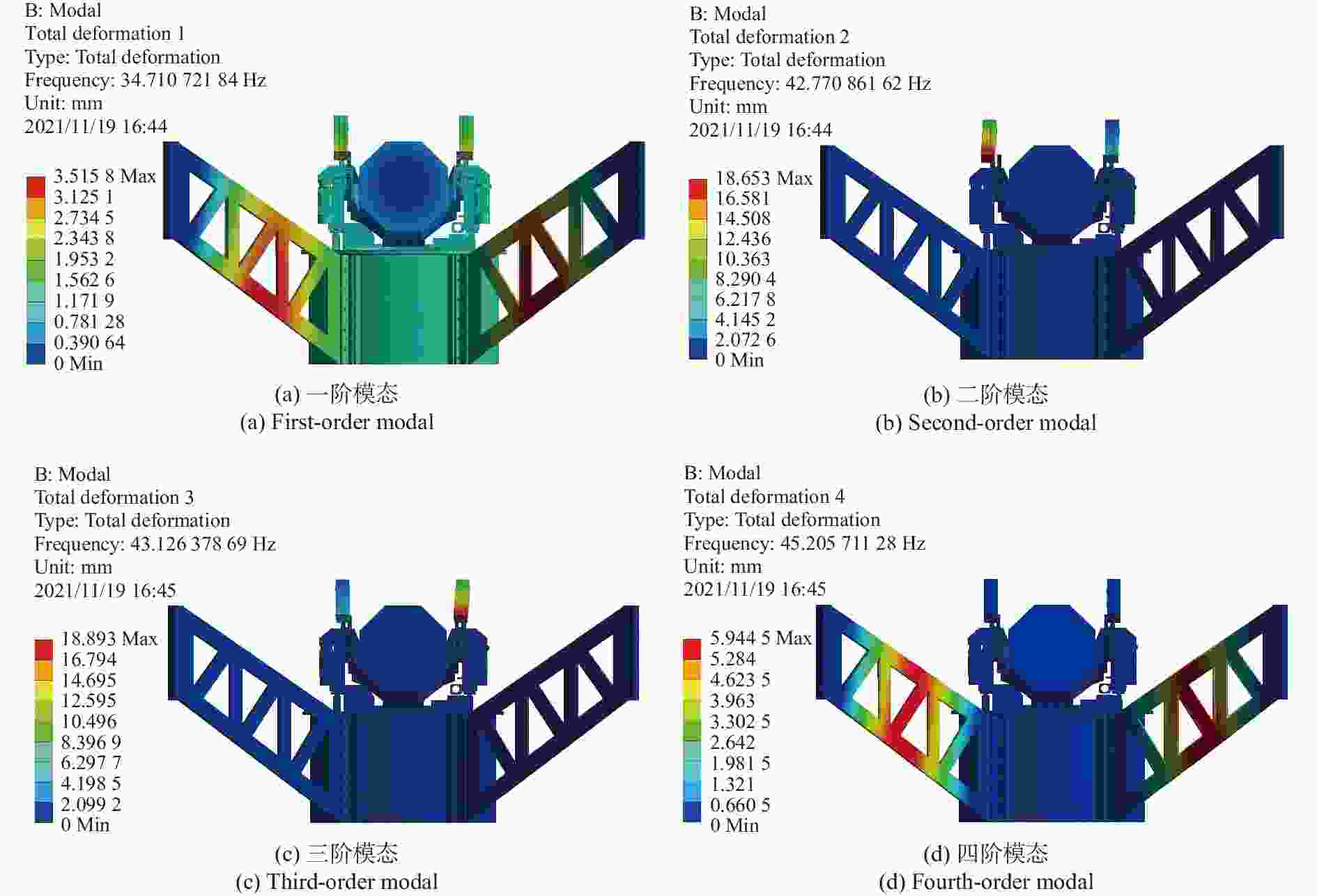
Figure 7. Modal analysis
由分析结果可知,该切换系统的一阶模态为34.71 Hz,振型为支撑叶片扭转及整个装配体扭动;第二阶模态为42.77 Hz,振型为俯仰轴系上配重的摆动;第三阶模态为43.13 Hz,振型为俯仰轴系上另一侧配重的摆动;第四阶模态为45.21 Hz,振型为支撑叶片的扭转。2 m级望远镜的一阶模态为10 Hz左右[16],该切换系统的模态分析结果表明最薄弱零件为支撑叶片,但综合静力学的分析结果表明,该系统刚度较好,满足在望远镜上观测使用。
-
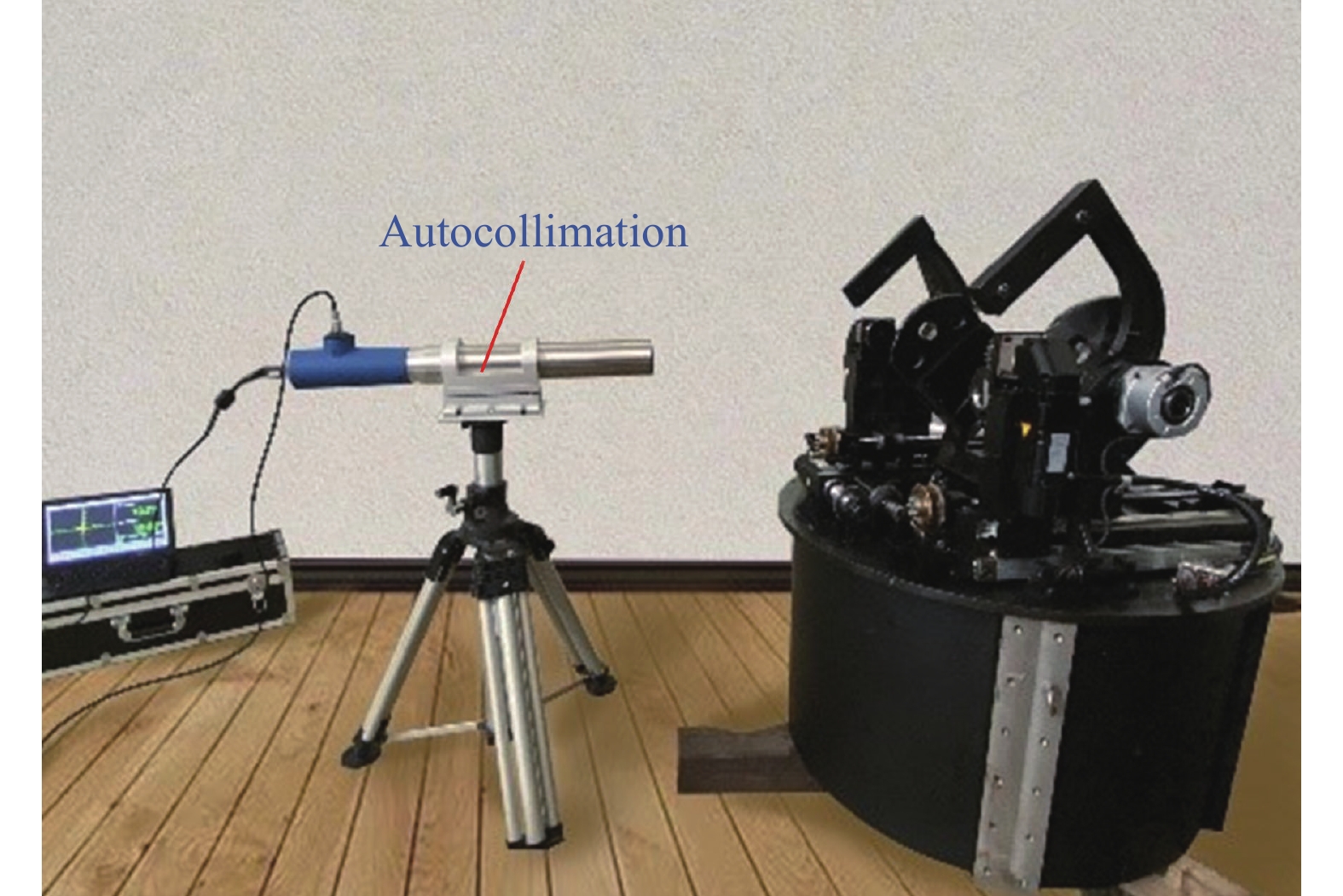
通过理论分析、设计制图、零部件的加工和元器件的采购,以及后期的装配调试,最终完成切换系统的初步研制。起初镜室中心采用小的平面镜来测试系统的性能,并添加配重块使俯仰轴系的力矩平衡,使其接近实际状态。利用自准直仪测试方位轴系和俯仰轴系的定位精度。自准直仪的分辨率为0.1″, 测量精度为0.5″(±100″以内),其测量精度均满足系统的测试要求。装调好自准直仪,在方位轴系和俯仰轴系到达观测的角度并稳定后,记录下仪器所测的数值。利用千分表测量平移机构的定位精度。千分表安装在两个导轨滑块的端部位置,在直线平移运动到达指定位置并稳定后,记录千分表的测量数据。图8为在实验室进行测试。

Figure 8. Experimental test
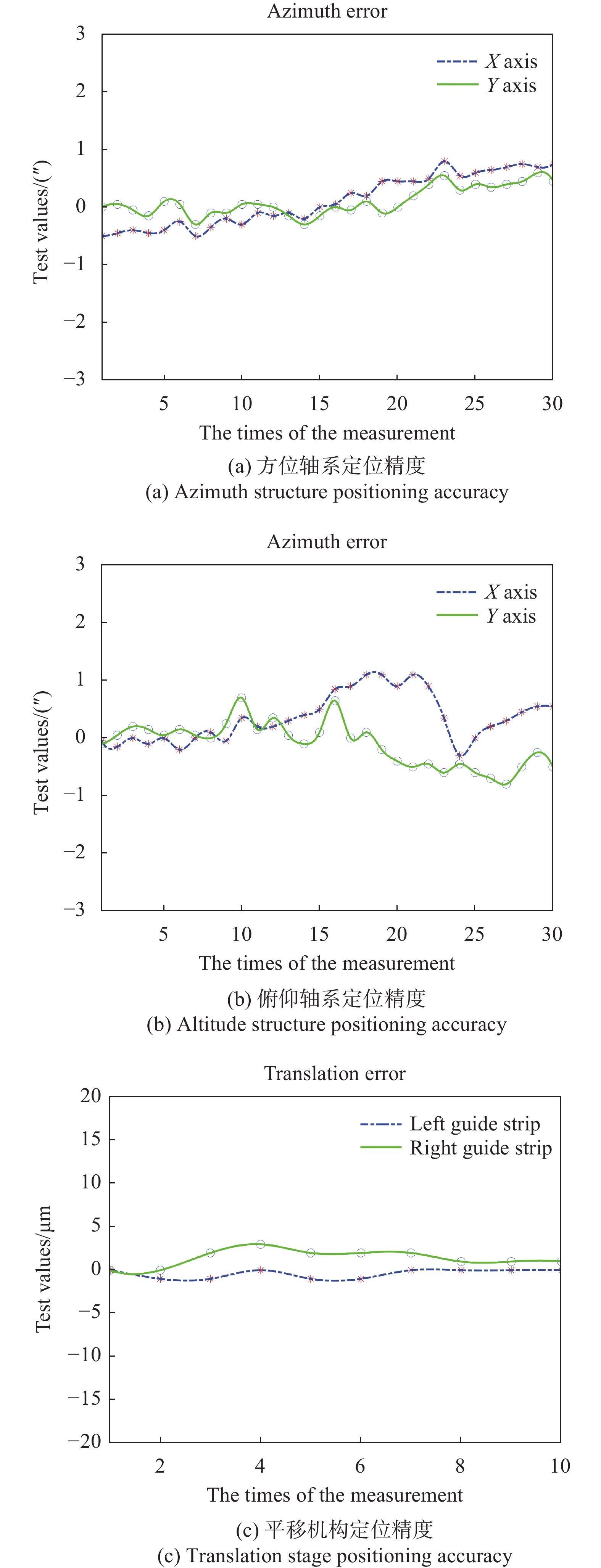
图9(a)~(c)分别为俯仰轴系、方位轴系以及平移机构的测试数据。理论分析下方位轴系、俯仰轴系及平移机构的定位误差分别为0.791″、2.0″以及5.83 μm。在实际测试中,方位轴系、俯仰轴系以及平移机构的最大定位误差分别为1.25″、1.10″及3 μm。理论分析与实际检测结果的差值由检测设备的固有误差、检测环境的温度、地面震动及装配调试中的随机误差等因素共同造成。理论分析下各轴系的定位误差与实验测量值接近,验证了结构设计和机械装调较为合理。

Figure 9. Experimental test data
利用自准直仪分别测出方位轴系和俯仰轴系到达位置并稳定后反射镜在X轴和Y轴的偏转角度,利用千分表测量平移机构到达位置后的精度。经过数据处理后,得到方位轴系、俯仰轴系及平移机构的最大定位误差分别为1.25″、1.10″及3 μm。经过计算,三个轴系的重复定位精度(RMS)分别为0.46″、0.42″及1 μm。在系统的实际焦点切换中,各个轴系误差的共同作用对镜面角度偏差影响较小,该切换系统满足望远镜在耐焦观测时的使用。
2021年9月底至10月初,中国科学院国家天文台南京天文光学技术研究所的技术人员在云南天文台丽江观测台站进行了2.4 m望远镜耐焦卡焦自动切换系统的装调,如图10所示。目前该望远镜已在正常观测中,后续耐焦平台的仪器将安装到位,不久便可以利用耐焦观测。

Figure 10. Installation and adjustment on site
-
文中针对丽江2.4 m望远镜耐焦与卡焦不能自动切换的现状,设计了一种三自由度的平面镜切换系统。详细介绍了系统的组成及实现方法,并通过有限元进行了仿真分析,分析了镜面支撑面形和重力作用下的静力学变形以及模态分析,最后实验测试了切换系统的三个维度定位精度。根据仿真及实验测试,在重力作用下反射镜面形精度
RMS<λ/60 (λ=632.8 nm),切换系统的第一阶模态为34.71 Hz,其刚度较好。理论分析得到方位轴系、俯仰轴系和平移机构的定位误差,与实验测试值基本相符。测试结果表明,方位轴系和俯仰轴系的重复定位精度优于0.5″,平移机构的重复定位精度为1 μm,达到了设计指标要求。各项指标性能均满足在该望远镜上的使用,同时为类似系统的研制提供了参考。
Design and analysis of Lijiang 2.4-meter telescope Nasmyth focus and Cassgrain focus switching system
doi: 10.3788/IRLA20210881
- Received Date: 2021-11-24
- Rev Recd Date: 2022-03-04
- Accepted Date: 2022-03-04
- Publish Date: 2022-06-08
Fund Project:
National Natural Science Foundation of China (11703057)
-
Key words:
- 2.4-meter telescope /
- tertiary mirror system /
- precision analysis /
- finite element analysis
Abstract: In order to solve the situation that the 2.4-meter telescope cannot switch Nasmyth focus and Cassgrain focus intelligently, a switching system was designed to switch focuses rapidly to improve the observation ability. Firstly, a M3 switching system model was built, the composition and implementation of the system were discussed in detail. Then precision analysis and finite element analysis were performed to optimize design. Finally, the calibration and test were carried out through experiment. Finite element analysis shows that under the action of gravity, the mirror surface shape RMS<λ/60 (λ=632.8 nm). The first-order modal of system reaches 34.71 Hz, the system has good stiffness. Experimental measurement shows that azimuth structure and altitude structure repetition precision are superior to 0.5″, translation stage repetition precision is 1 μm. The switching system meets the performance requirements and has been installed in the telescope, which has been used for observation. It also provides a reference for the design of other telescopes.



















































 DownLoad:
DownLoad: