






-
全球卫星导航系统(Global Navigation Satellite System,GNSS)是一种基于空间的无线电导航定位系统,可以在地球表面或近地空间中的任何位置为用户提供全天候的三维坐标,速度和时间信息。是能在地球表面或近地空间的任何地点为用户提供全天候的三维坐标、速度以及时间信息的空基无线电导航定位系统,比较熟悉的有美国的GPS定位系统、俄罗斯的GLONASS定位系统及欧盟的Galileo定位系统[1]。近年来,随着我国航天事业的快速发展,我国自主研发的北斗导航定位系统发展迅猛,随着2020年6月的北斗三号卫星成功发射,北斗导航系统已经完成部署,可见卫星星座的数量有了显著提高。
然而,在卫星信号受干扰严重的复杂地貌环境中,可见卫星数目仍然较少,卫星信号质量差,单模卫星定位导航的精度一直是不尽人意,尤其是针对动态导航定位精度问题更为明显。
导航系统的效率和精确性取决于导航解算算法,目前已有较多学者在该领域取得了较多的研究成果,比较常见的如伪距定位,但大多是单点定位、相对定位和差分定位。针对伪距定位,国内外学者做了大量研究,总结起来,伪距定位算法主流上一般都采用基于卫星高度角的加权最小二乘算法,依据高度角调整参与解算用户位置的卫星的权值进而完成目标定位解算[2]。典型的组合定位解算算法主要有如传统Gauss-Newton迭代法[3]以及Helmert方差分量估计迭代法[4]。总体来看,针对我国导航系统的组合定位算法研究,研究成果大多是针对基础理论论证分析,没有给出一种实用性较强的解算算法以及相应的工程应用案例,很难有说服力。
因此,为了提高动态导航定位精度,文中提出了一种可实现性强的导航解算算法,即一种多模GNSS的伪距组合定位算法,它是基于一种有迭代的组合定位解算算法。文中所述算法的有效性和可靠性经过了仿真实验和实际应用试验验证,具有一定的理论意义和现实意义。
-
参考文献[2]对伪距联合方程的阐述,在GNSS伪距组合定位过程中,考虑纠正由明显的卫星时钟误差、电离层延迟误差、相对论和对流层延迟引起的误差的情况下,第i颗卫星的伪距观测方程可以表示为:
式中:
$i = 1,2, \cdots ,n$ ,$\left( {{x_i},{y_i},{{\textit{z}}_i}} \right)$ 表征第i颗卫星的坐标;${\rho _i}$ 表征第i颗卫星的校正伪距观测值;$c$ 为光传播速度;${t_u}$ 为接收机时钟与系统时钟之间的时钟差异引起的时间延迟;$\left( {{x_u},{y_u},{{\textit{z}}_u}} \right)$ 为GPS/BDS三频接收机的位置坐标;$\delta _f^i$ 为多路径效应及卫星故障造成的测量过程中的误差,即测量误差;$\delta _c$ 为GPS/BDS三频接收机内部噪声干扰带来的共有误差;$\delta _r^i$ 为尚未完全修正的其它未知误差,诸如其它电离层延迟误差、相对论引起的误差以及对流层延迟误差等,$\delta _r^i$ 相互独立服从正态分布,即是$\delta _r^i \sim N\left( {{u_\delta },\sigma _\delta ^2} \right)$ 。假设共有
$n$ 颗可视卫星,对伪距观测方程可进行一次泰勒级数展开,可得线性化形式如下:式中:
$\Delta \rho $ 是$n \times 1$ 维向量,表征期望测量值与已纠正伪距之差;$H$ 是$n \times 4$ 维向量,表征测量矩阵;$\Delta x_u^{\rm T}$ 是$3 \times 1$ 维向量,表征接收机估计位置与真实位置之间的差异;$\Delta {t_u}$ 为接收机时钟与系统时钟之间的时钟差异估计和实际时钟差的修正值;$\delta $ 是$n \times 1$ 维向量,表征不可预知修正的其他伪距残余误差。根据公式(2),可得到第i颗卫星的伪距误差
$\delta _i^{real}$ 如下:笔者所在课题组在利用加权最小二乘法求解过程中,一般需要做接收机估计位置与真实位置足够接近的假设,从而仅有伪距公共误差部分
$\delta _{com}'$ 受伪距误差$\Delta {t_u}$ 的影响,即则有伪距残差
$\delta _i$ 对公式(5)进一步分析,在相同的历元时刻,比较不同卫星的伪距质量,就是比较伪距特征误差,也即是比较不同卫星伪距的测量误差、随机误差与其均值偏差之和的大小。假设给出第i颗卫星伪距的特征误差
$\delta _{eig}^i$ ,则有$\delta _{eig}^i$ 相互独立且服从$\delta _{eig}^i \sim N\left( {\delta _f^i,\sigma _\delta ^2} \right)$ 。在实际的定位解算过程中,不可能直接获得伪距特征误差,也不可能获得不同卫星伪距特征误差的大小关系,一般根据公式(5)和(6)表示的伪距残差近似模型求得伪距特征误差。
伪距残差近似模型分如下两种情况:
(1)当所有观测卫星的测量误差满足
$\delta _f^i = 0$ 时,即误差服从正态分布时,伪距特征误差可以近似表示为:(2)当某些观测卫星的测量误差不服从正态分布时,比如当出现多径效应误差、卫星故障等问题时,
$\delta _{com}'$ 明显受到某些卫星测量误差的影响,使得之后的迭代运算中随机误差的均值估计偏差较大,导致利用公式(7)得到的伪距特征误差近似值出现明显偏差,误差逐渐积累,最终导致定位失真。在实际测量环境中,多卫星同时出现故障的概率是很低的,只是很少的部分卫星出现故障的概率是存在的,因此残差中值不易受到残差中个别大数的影响,变换比较微小,相对残差均值更稳定。因此,当部分卫星存在明显的测量误差时,利用残差中值判定卫星伪距质量更合理,假设伪距残差中值为$\delta _{mid}$ ,得到如下卫星伪距特征误差修正值:式中:
$\delta _f^{mid}$ 和$\delta _r^{mid}$ 分别表征残差中值中所包含的测量误差和随机误差。 -
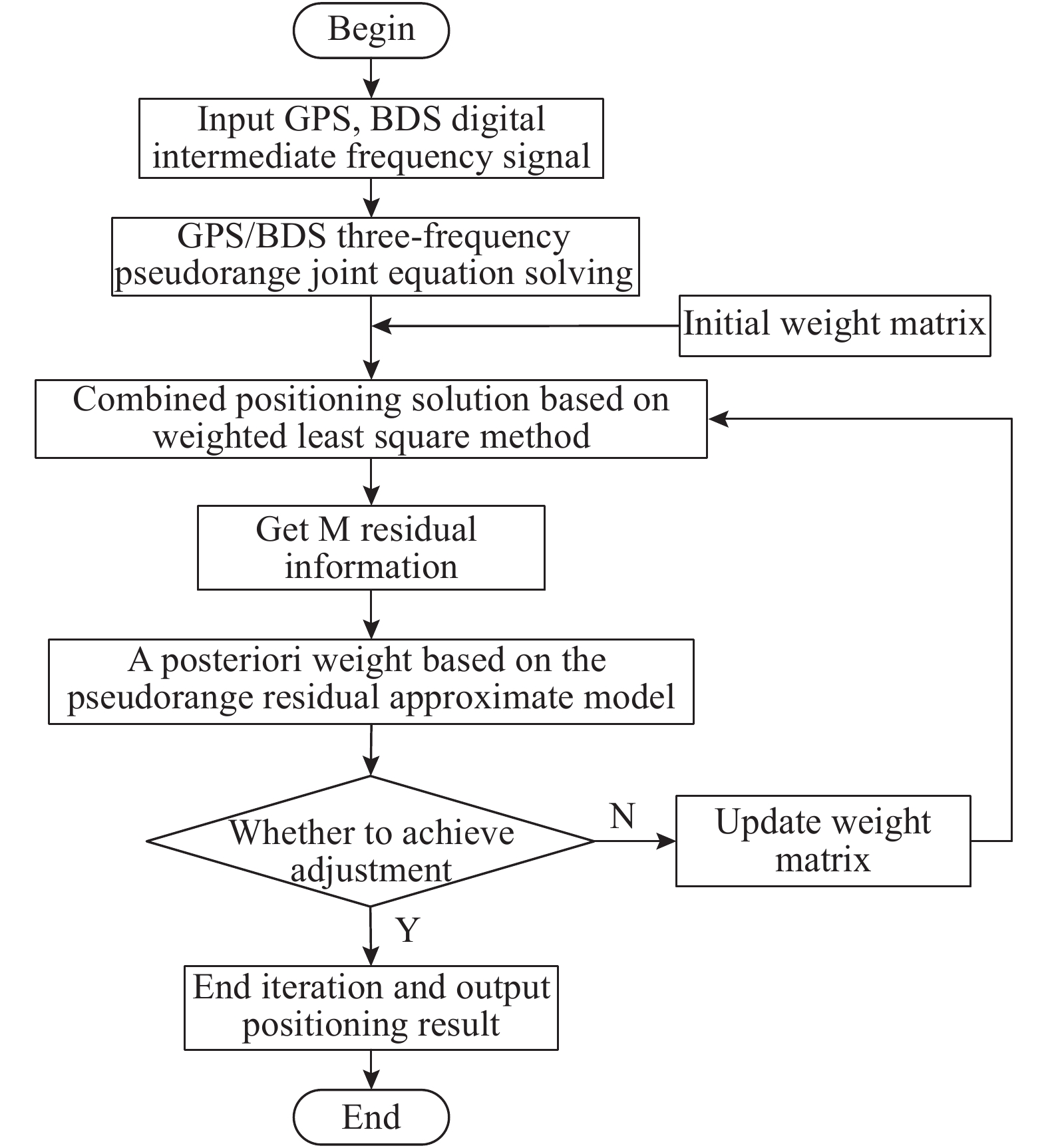
此节针对多模GNSS伪距组合定位算法提出改进,提出一种有迭代的GPS/BDS三频伪距组合定位算法,该算法首先借助M残差模型提高了Helmert方差分量估计法的鲁棒性,然后提出了一种权矩阵确定方法,快速准确固定加权最小二乘法中的权矩阵,算法总体流程图如图1所示。

Figure 1. Schematic diagram of iterative combined positioning algorithm
通过算法流程图可知,文中提出的算法的关键是组合定权算法的实现,从参考文献[2]的描述中可以看出,伪距定位算法主要都采用基于卫星高度角的加权最小二乘算法完成解算。因此,GPS/BDS三频伪距组合定位时,三频伪距联合方程的解算结果由权矩阵决定,所以将详细介绍权矩阵的确定方法和过程。算法的主要步骤如下:
(1)接收机接收GPS、北斗数字中频信息,作为解算的输入;
(2) GPS/BDS三频伪距联合方程求解;
(3)给定初始权矩阵,进行先验定权;
(4)基于加权最小二乘法组合定位求解;
(5)解算完成,获取M残差信息,并基于伪距残差近似模型进行后验定权矩阵;
(6)条件判断,是否实现平差,如若不满足平差条件继续更新权矩阵,
(7)返回步骤(4)继续循环解算;如若满足平差条件,则直接进行下一步;
(8)结束循环迭代,输出定位解算结果。
-
由上文可知,基于文中提出的组合定位算法的定位精度在一定程度上取决于权值矩阵W 的取值,权值越精确即W 矩阵越精确,则接收机定位精度越高。现阶段,比较常用的权重
${w_n}$ 取值为误差标准差的倒数。其表达式如公式(9)所示:由上式可知,该权值的大小取决于误差方差值,直接基于误差方差值确定权矩阵是部分学者提出的一种方法,但这种方法往往忽略了多次迭代过程中粗差产生的影响。因此利用误差方差作为构造权矩阵的主要依据的思路有待进一步改进[5]。基于上述原因,文中结合卫星定位的实际情况,提出了一种权矩阵固定方法。其主要思想是:对于某一卫星定位系统中的不同卫星所获得的伪距测量值,首先根据卫星高度角的大小对其进行定权;之后,在多次迭代的过程中,利用M估计的方差分量来完成权矩阵的构建;最后,得出一个更为精确的最优权矩阵。
在接收机接收卫星信号完成用户定位的过程中,其定位精确度在很大程度上会受到卫星高度角
$\theta $ 的影响。这是由于卫星位置的不同,导致信号在传播过程中受到大气层延迟、多径干扰等方面的影响各不相同。通过多次试验发现,卫星高度角越高则接收机受到的大气层延时、多径干扰问题越小[6]。卫星高度角越低时,接收机受到的各种干扰特别是由于多径效应引起的干扰将会越严重。因此在该部分中将首先根据统一系统的卫星高度角的大小对获得的伪距观测量进行定权[7]。对于高度角较大的卫星,对应的伪距观测量权值应取相对较小的权值;反之,权值应相应的较大。文中利用$\sin \left( \theta \right)$ 模型来完成该权矩阵的构建。在考虑卫星高度角对伪距观测量的影响时,应同时考虑到观测量的标准差
$\sigma $ 对最终接收机定位精度的影响,因此本课题在构建权值矩阵时同时考虑了观测方差以及定位时的卫星高度角信息。首先,确定$\sigma _0^2$ 为当卫星处于接收机的天顶方向时的观测方差;其次,需要设定卫星相对于接收机的高度角为$\theta $ 时的观测量方差。考虑到对于单一的BDS或GPS系统而言,对于当处于接收机天顶方向的卫星不同时,其产生的$\sigma _0^2$ 值应相同,所以设定文中提出的算法中的初始权重为${w_n}$ 。同时,为了便于计算,将上文提到的加权最小二乘的解,即公式(9)中的P作为全矩阵。因此文中提出的算法的初始权矩阵${P_0}$ 为:式中:
$\sigma _0^2$ 表示当卫星处于接收机的天顶方向时,利用单点定位所产生的伪距观测量方差;${\theta _i}$ 表示不同卫星相对于接收机的高度角。此外,对于同一位置同一系统而言,$\sigma _0^2$ 是相同的。当利用BDS或GPS某一单系统进行定位的过程中,不同卫星的
$\sigma _0^2$ 值相同,在进行定位解算的过程中,可利用上文提到的经典的最小二乘法的求解步骤将其消除,而无需计算其详细的取值[8]。而针对文中提出的双系统三频组合定位中,由于BDS与GPS存在系统间的差异,因此对于不同的卫星导航系统其$\sigma _0^2$ 也会存在差异,无法对其进行消除。因此其权值的确定应根据$\sigma _0^2$ 值的大小进行相应的调整,当$\sigma _0^2$ 越小时,表明伪距观测量较为精确,其对应的权值应越高;反之,权值应相应的较小[9]。验后估计定权法需要结合上述提到的高度角先验定权来完成其权值的确定,具体思路是对初始残差信息进行估计,得出当前运算结果的方差和协方差,并根据具体的估计结果更新权矩阵,实现平差[10]。为了使计算出的方差和协方差值能够满足最终定位精度的需求,通常情况下经过若干次迭代就可以固定最优权矩阵[11]。传统的Helmert方差分量估计法直接计算残差,没有一定的准则,导致该方法的鲁棒性较差,当遇到误差较大的测量值时,容易影响迭代过程,而文中借助M残差模型优化了Helmert方差分量估计法,在计算残差是需要依据M估计准则,从而有效的实现权矩阵更新迭代的优化[12],实现接收机的高精度定位。
文中在测量数据观测中涉及到两类独立的观测方程,BDS观测矩阵设为
${L_1}$ ,是${n_1} \times 1$ 维度矩阵,GPS观测矩阵设为${L_2}$ ,是${n_2} \times 1$ 维度矩阵,它们的权值矩阵分别设置为${P_1}$ 和${P_2}$ ,其误差方程分别为:其中,
伪距残差模型优化的Helmert方差分量估计法的目的是利用各次平差后各类观测值的残差信息来重新估计以残差均值为中心的标准差
$\sigma _{01}$ 和$\sigma _{02}$ ,除此以外,为了适应伪距残差近似模型,还需要利用各次平差后各类观测值的残差信息来重新估计以残差中值为中心的标准差$\sigma _{01}'$ 和$\sigma _{02}'$ 。一般而言,严格的方差分量估计公式为:
其中,
式中:
${N_1}$ 和${N_2}$ 分别为BDS和GPS观测数据的个数,${N_1} = A_1^{\rm T}{P_1}{A_1}$ ,${N_2} = A_2^{\rm T}{P_2}{A_2}$ ,$N = {N_1} + {N_2}$ ;${k_1} = \dfrac{{\lambda _{1i}^{ - 2}{\lambda _{2i}}}}{{\sigma _i^2}}$ ;${k_2} = \dfrac{{\lambda _{1i}^{ - 1}{\lambda _{3i}}}}{{\sigma _i^2}}$ ;${k_3} = \dfrac{{\lambda _{1j}^{ - 2}{\lambda _{2j}}}}{{\sigma _j^2}}$ 。通过解公式(14)得
${\overset{\frown}\sigma } _{01}^2$ 和${\overset{\frown}\sigma } _{02}^2$ 之后,依据本节开始阐述的伪距残差近似模型重新调整权值矩阵$P$ ,权矩阵按照如下原理进行动态调整:将BDS中对应的标准差
$\sigma _{01}$ 和$\sigma _{01}'$ 中的大值作为检验统计量$D$ :$D = \max \left( {\sigma _{01},\sigma _{01}'} \right)$ ,特征误差的标准差$\sigma _\delta $ 置为判决门限$T$ :即$T{\rm{ = }}\sigma _\delta $ ,在$D < T$ 时,认为误差分布近似于正态分布,认为此时不存在误差大数,直接利用公式(7)可计算出伪距特征误差;在$D \geqslant T$ 时,则存在误差大数,利用公式(8)可计算得到伪距特征误差;同理GPS中对应的标准差$\sigma _{02}$ 和$\sigma _{02}'$ 做类似处理。上述估计的标准差计算完成后,接着可利用其对近似伪距特征误差进行标准化,进而通过核函数构造权值矩阵
$P$ ,对应BDS系统中标准差$\sigma _{01}$ 和$\sigma _{01}'$ 构造的权值矩阵${P_1}$ 为:同理,对应GPS系统中标准差
$\sigma _{02}$ 和$\sigma _{02}'$ 构造的权值矩阵${P_2}$ 同理可得。根据公式(17)和(18)联合构造GPS/BDS系统的权值矩阵
$P$ ,通过迭代求解,直到检验的两类观测值的方差相近为止(${\overset{\frown}\sigma } _{01}^2 \approx {\overset{\frown}\sigma } _{02}^2$ )。根据参考文献[13]论述,
${k_1}$ ,${k_2}$ 和${k_3}$ 中的参数$\lambda {_{1i}}$ ,${\lambda _{ \,2i}}$ ,$\lambda {\,_{3i}}$ 可以基于M残差的方差分量估计法进行推导,根据M估计的定义[13],不同类观测的解方程为:式中:
$\varphi (x)$ 是奇函数,根据M估计线性表达式理论,公式(19)可表示为:也即:
M估计法是观测误差服从P-范数分布时的最大似然估计。该方法具有一定的容错能力,能够减少甚至消除粗差对参数估计的影响,从而获得具有一定效率的鲁棒估计[14]。一般而言,测量数据误差是服从高斯分布模型的,考虑正态分布,则
${\Delta _{{ij}}}$ 服从期望为0、方差为${\sigma _i}^2$ 的正态分布,如公式(22)所示:令:
则
公式(24)给出了正态分布条件下参数
${\lambda _{1i}}$ ,${\lambda _{2i}}$ ,${\lambda _{3i}}$ 的一般估算公式,可以代入公式(15)完成S的求解,进而通过公式(14)完成$\hat \theta $ 的迭代求解,根据公式(17)和(18)迭代求解即可。 -
为了充分验证文中所述有迭代伪距组合定位算法的有效性,从算法定位精度方面进行实验,横向分析算法的有效性。同时,为了比较文中所述算法与已有算法的性能差异,文中设计了纵向对比实验,选择传统Gauss-Newton迭代法(参考文献[3]中的算法)、Helmert方差分量估计迭代法(参考文献[4]中的算法)以及无迭代伪距组合定位算法(参考文献[15]中的算法)进行对比实验,这三种算法都是在组合定位解算过程中常用且成熟的算法,且在国内外导航设备上均取得了大量应用,具有较好的对比参照性[15]。因此,与这两种算法进行对比实验能够证明文中所述两种算法各自的优势和所适用的场景。
根据前文所述,文中实验仿真平台为MATLAB,实验数据来源为某型号中频信号采样器输出的中频采样数据,为了保证对比实验的有效性,中频信号的捕获和跟踪算法采用相同的软件算法,且选用带有抗多径功能的跟踪环路。为了避免其他影响因素会影响算法性能的分析,尤其是多径效应带来的误差,文中选择的实验场景为空旷场地下,也就是中频数据采集场景为空旷场地。中频数据采样点(天线)的精确位置通过精密单点定位的方式得出,以便衡量定位解算算法的定位精度。
-
文中基于中频信号采样器采集到的实际数据,从多个不同的方面进行实验仿真分析,来验证文中所述算法的性能。
(1)可见卫星数目对比分析
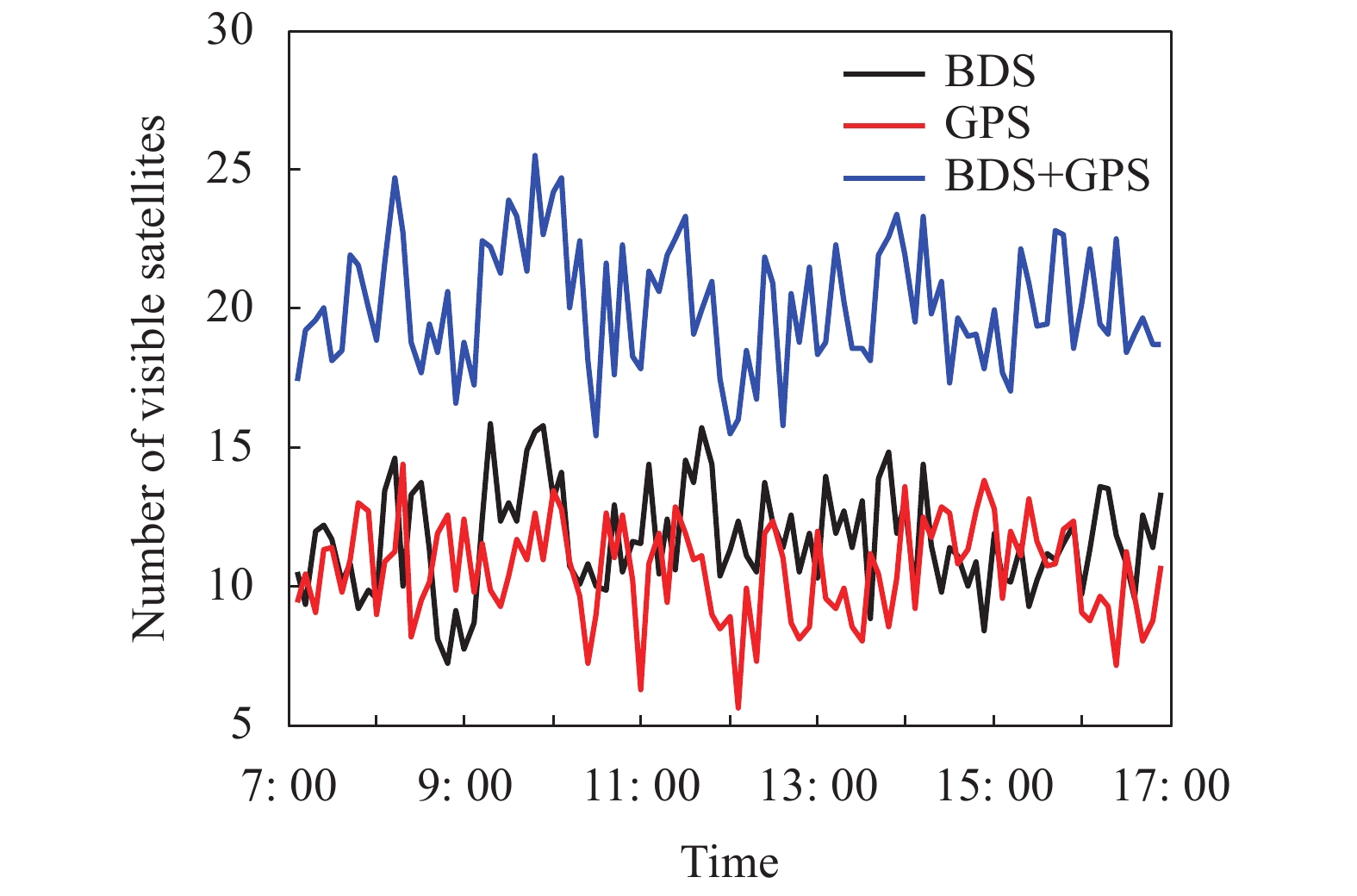
可见卫星数的多少在一定程度上影响着接收机的定位精度,由第二章卫星定位原理可知,只有当可见卫星数大于等于4时,接收机才能实现定位。据统计,在同一场景下同一个接收机可见卫星数越多,则其定位精度越高。因此为了确保文中提出算法的有效性,同时结合上文提出的实验方案,在太原理工大学明向校区信息与计算机学院楼下进行长达10 h的中频数据采集,记录期间BDS、GPS的可见卫星数并对其进行记录与统计,利用matlab将统计结果进行绘制,其结果如图2所示。
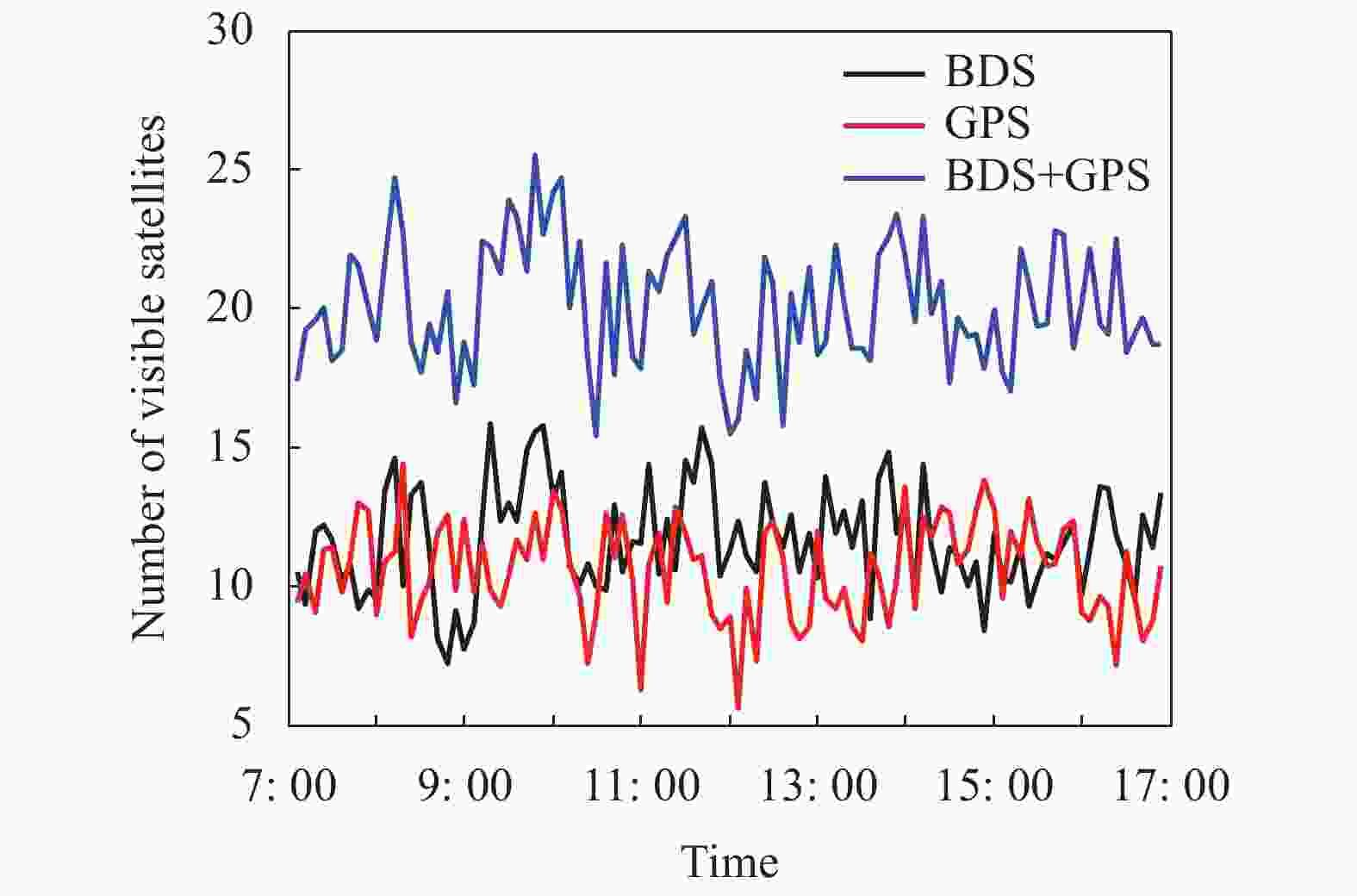
Figure 2. Comparison of the visible satellites number between single-mode and dual-mode GNSS receiver
图2中,红色线条表示GPS卫星的统计结果、蓝色线条表示BDS卫星的统计结果、黑色线条表示GPS/BDS组合系统的可见卫星数。通过统计分析可知,在所选定的区域内,BDS可见卫星的平均数为6、GPS可见卫星的平均数为5、双系统的可见卫星平均数为11。由上图可知,在数据采集的过程中,GPS/BDS双系统的可见卫星数在任意时刻都大于单系统的可见卫星数。因此从可见卫星数目的角度出发,双系统更有利于提高定位精度。该方案在复杂的环境下,特别是单系统的可见卫星数小于4的场景下,效果愈发的明显。
(2)位置精度因子PDOP值对比分析
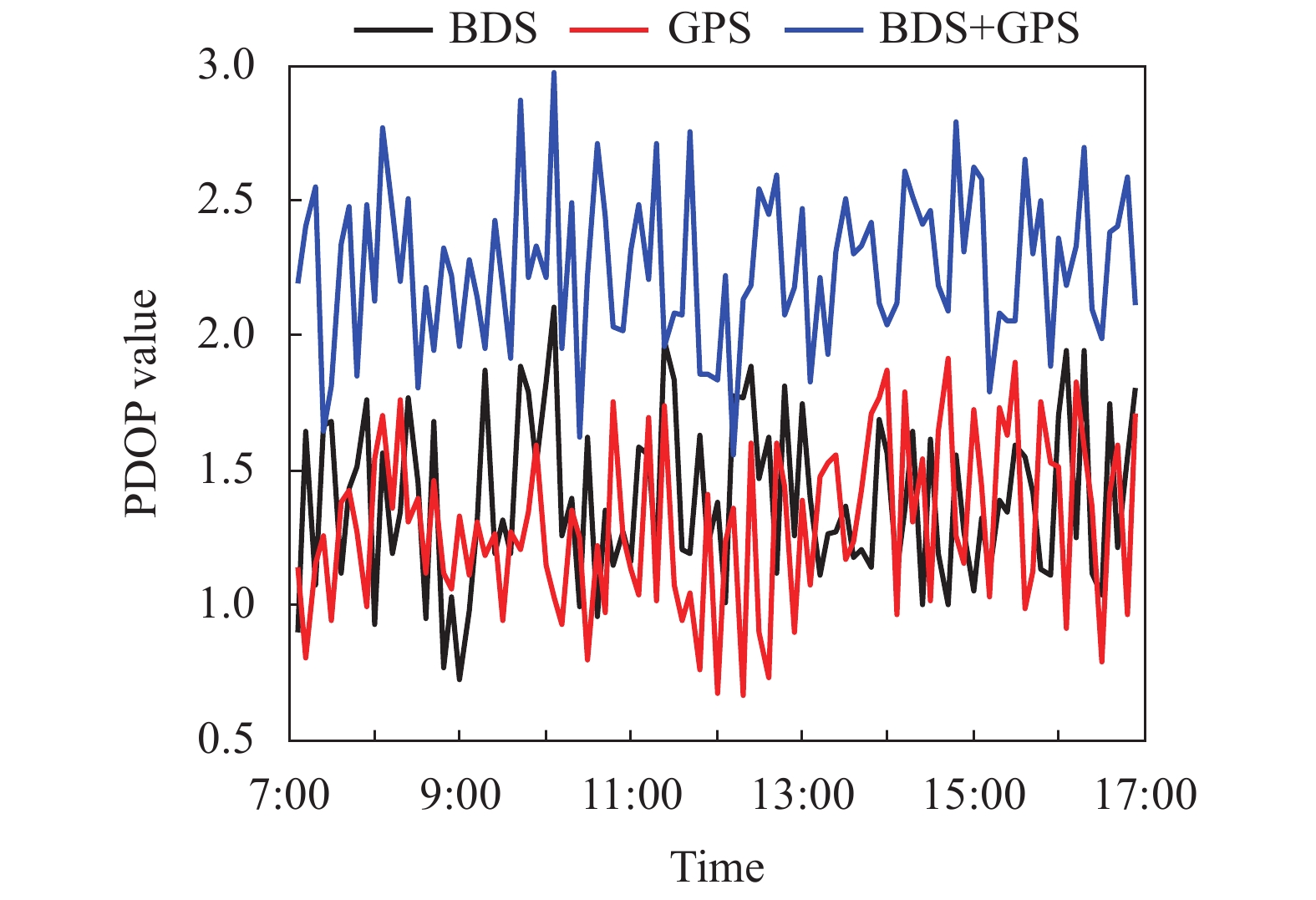
位置精度因子(Position Dilution of Precisio Precisio,PDOP)可以有效体现接收机的定位导航性能,其值越小则表明接收机的定位质量越好,定位精度越高。对于PDOP的计算方式目前已经有较为成熟可靠的算法,限于篇幅原因文中不在进行叙述,且目前大多数的接收机在输出定位结果的同时会实时的计算PDOP值。文中在实验过程中,对PDOP值进行了统计分析,其结果如图3所示。

Figure 3. Comparison of PDOP value between single-mode and dual-mode GNSS receiver
为了和可见卫星数的统计结果相对应,在实验中,依然用红色线条表示利用BDS实现定位的PDOP值,用蓝色线条表示利用GPS单系统实现定位的PDOP值,用黑色线条表示GPS/BDS双系统实现定位的PDOP值。通过统计分析可知,BDS单系统实现定位的PDOP平均值为1.67、GPS单系统实现定位的PDOP平均值为1.6、GPS/BDS双系统实现定位的PDOP平均值最小为0.83。从上图以及PDOP平均值可知,利用双系统实现定位时定位效果最好,因此文中提出的组合定位算法可以有效的提高定位精度。
(3)定位精度对比分析
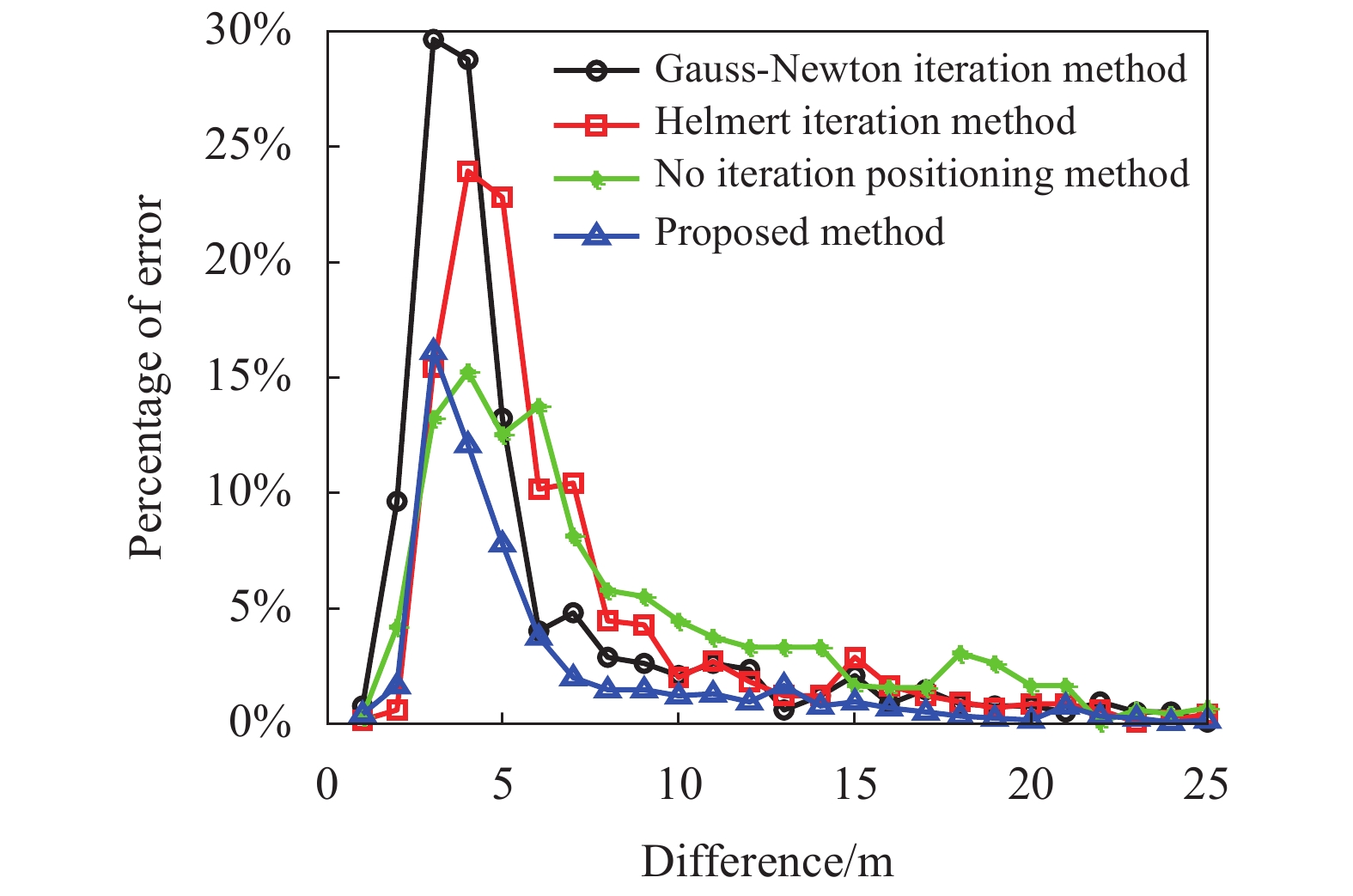
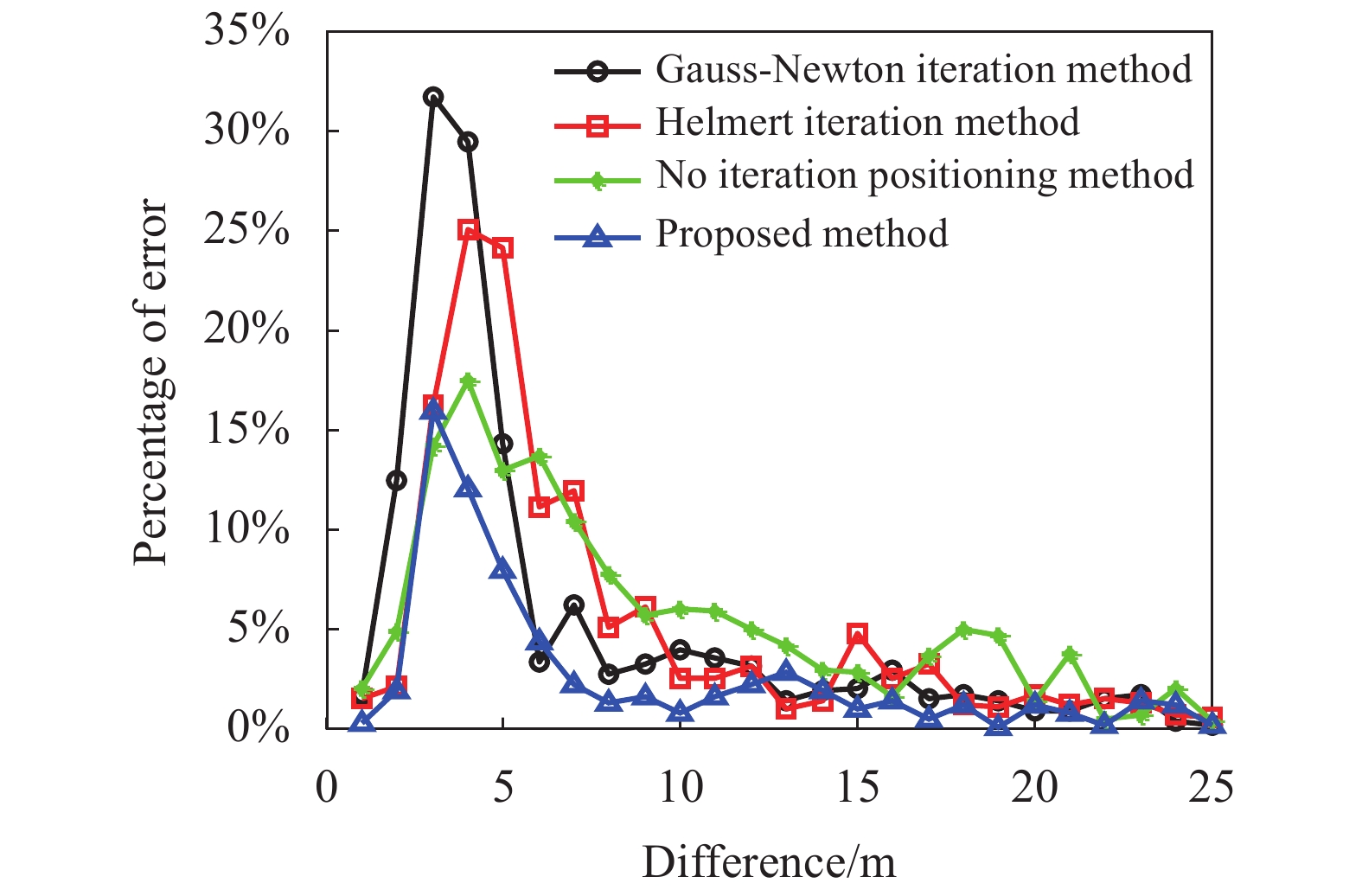
根据前文所述,为了验证文中所述算法对于组合定位算法的定位精度有所改进,文中设计了纵向对比实验,实验过程中解算了多个中频数据采样点,将四种算法在X、Y、Z三个方向上的定位误差分布情况通过折线图的方式对比分析四种算法的定位精度,分别如图4、5、6所示。

Figure 4. Positioning error comparison diagram of the X direction
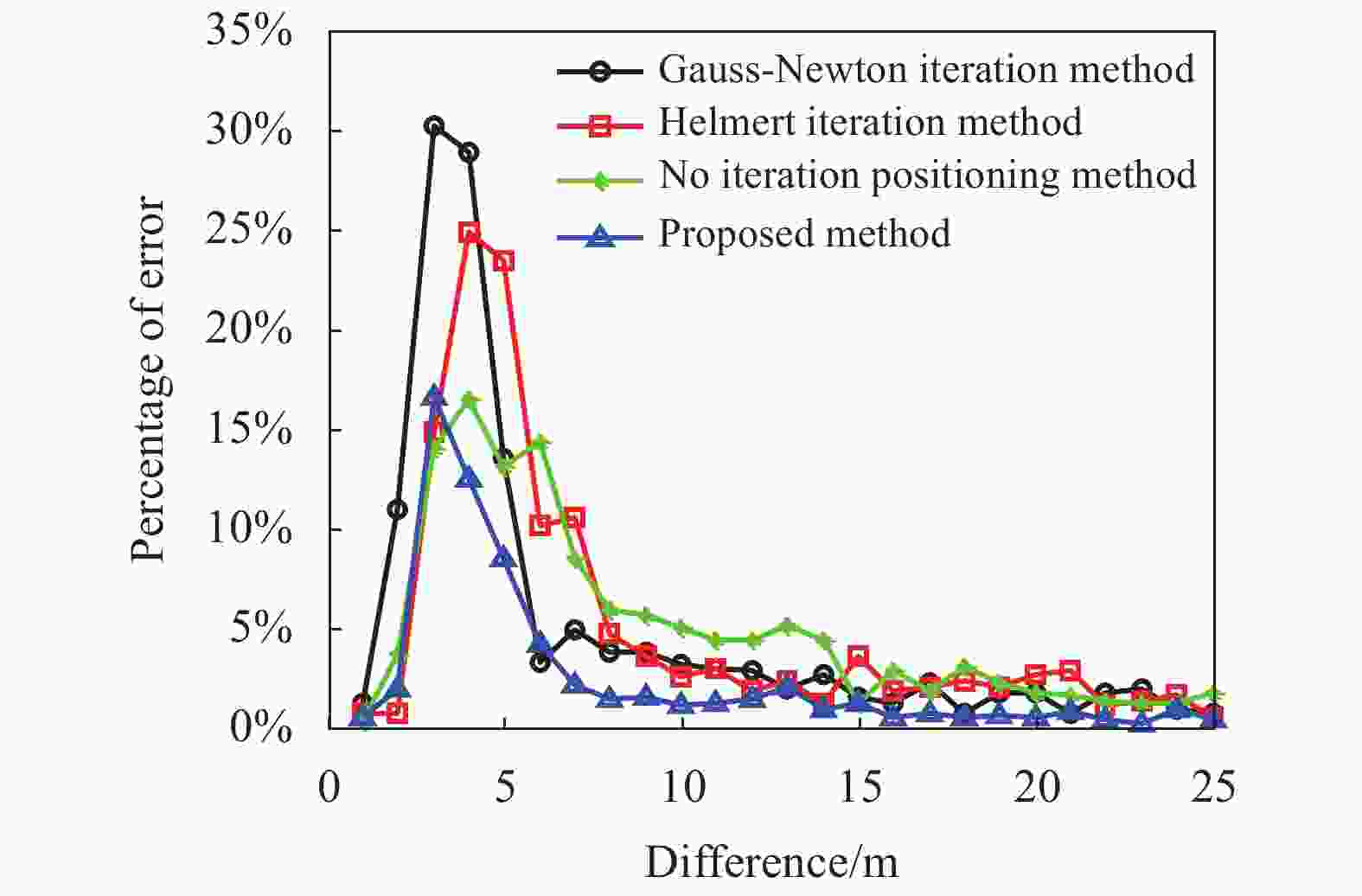
Figure 5. Positioning error comparison diagram of the Y direction
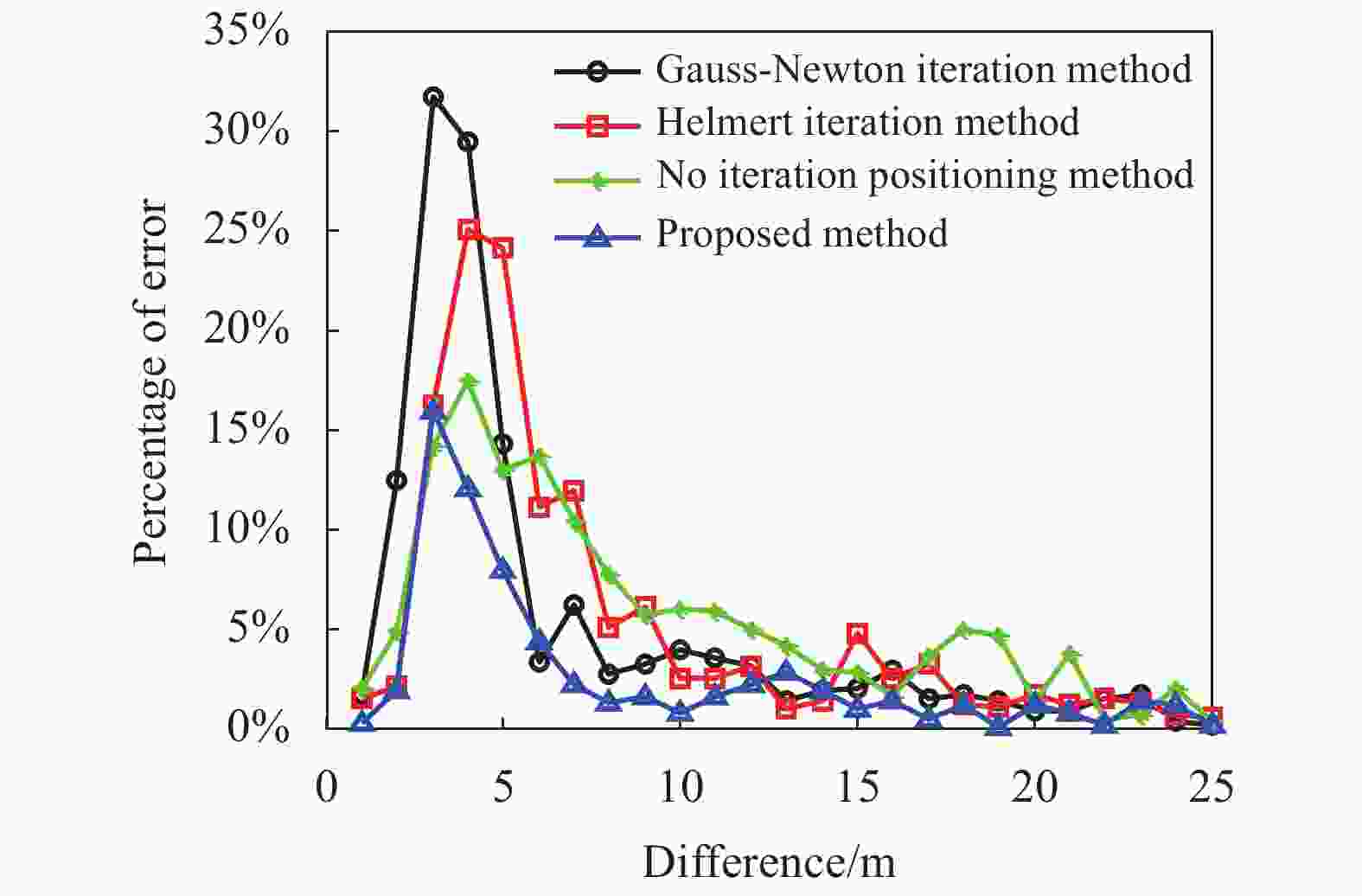
Figure 6. Positioning error comparison diagram of the Z direction
图4、5和6表示了四种不同算法的定位误差分布情况,横轴为误差值,纵轴为对应该误差值在所有误差值中所占的百分比,从图中可以看出,文中所设计的有迭代定位算法整体误差分布更均匀,整体定位误差最小。无迭代算法只在较小误差值处的占比小于文中设计的有迭代算法,而在较大误差值处的占比大于文中设计的有迭代算法,同理可以看出Gauss-Newton迭代算法的定位误差最大,Helmert方差分量估计迭代法次之。统计实验数据可知,在X方向上,Gauss-Newton迭代算法定位误差值为1.26 m,Helmert方差分量估计迭代法为0.95 m,文中所设计的无迭代组合定位算法为0.84 m,有迭代组合定位算法为0.75 m;在Y方向上,Gauss-Newton迭代算法定位误差值为1.42 m,Helmert方差分量估计迭代法为1.02 m,文中所设计的无迭代组合定位算法为0.98 m,有迭代组合定位算法为0.77 m;在Z方向上,Gauss-Newton迭代算法定位误差值为1.54 m,Helmert方差分量估计迭代法为1.05 m,文中所设计的无迭代组合定位算法为1.04 m,有迭代组合定位算法为0.81 m,对比可以看出,这四种算法在X、Y、Z三个方向上的表现是一样的,Gauss-Newton迭代算法定位精度最低,有迭代组合定位算法定位精度最高。
同时,无迭代组合定位算法的定位精度也比两种传统的组合定位解算算法的定位精度要高,这与算法中采用的迭代方式有关,文中所述有迭代组合定位算法是在Helmert方差分量估计迭代法的基础上增加了M估计过程,因此定位精度最高,这与前文理论推导得出的结论是完全吻合的,同时仿真实验结果也进一步验证了算法的有效性。
为了更加直观的对比分析,以及明确无迭代组合定位算法和有迭代组合定位算法的定位误差值,对上述实验数据进一步统计计算,可以得到四种算法的综合定位精度RMS值如表1所示。
Method Positioning accuracy (RMS value) Gauss-Newton iteration method 2.44 m Helmert iteration method 1.74 m No iteration positioning method 1.65 m Proposed method 1.34 m Table 1. Precision comparison of the traditional algorithm and the proposed algorithm
从表1中可以看出,文中所述算法的定位精度要高于其他两种算法。
除此之外,为了确保整个实验过程中数据解算的正确性,文中还将把本次实验中无迭代组合定位算法的解算结果,与当前市面上相对实用的公用软件GrafNav的计算结果进行对比[16]。实际操作步骤为:使用一致的中频数据进行实验,之后再使用GrafNav来对位置进行精确计算,对数据进行动态差分求解计算,分析GrafNav软件解算坐标标准误差(Standard Deviation,SD)与文中算法解算结果的差值(即文中计算结果与实际结果的差值),把该差值应用高斯坐标方程画出来[17],如图7所示。
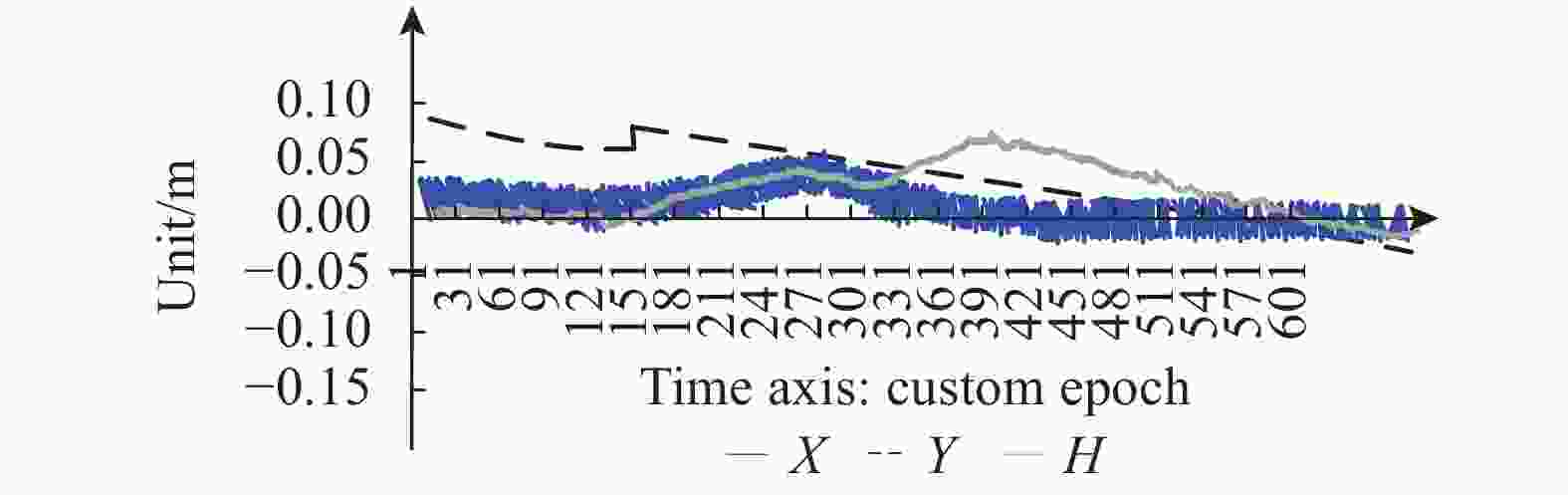
Figure 7. Comparison of the proposed algorithm and the public software GrafNav
由图7可以看出,分析上述曲线可以得出结论,使用公用软件CrafNav的计算结果与应用文中方法的位置结果差值十分微小,在X与Y方向两种方法解算结果差值处于3cm以内,而H方向两种方法解算结果差值处于5cm内(此处表示文中算法与公用软件GrafNav定位结果的差值,而非文中算法的定位误差),进一步验证了文中所述算法在数据解算过程中的准确性,确保了文中实验过程的有效性。
-
为了更好地验证文中所述算法的工程应用性,该节针对具体工程项目的数据分别应用两种算法进行解算分析,并与北京强度环境研究所生产的M300 GPS/BDS接收机进行仿真分析对比。
M300 GPS/BDS接收机动态定位主要指标如下:
(1)信号跟踪:20通道;
GPS L1C/A码L1/L2 P码,BDS B1\B2 I支路C码;
(2)定位参数:
伪距精度:L1=4 m/L2=5 cm,B1=3 cm/B2=4 cm;
载波精度:L1=3.5 m/L2=3.8 m,B1=5 m/B2=3.5 m;
单点定位精度 <3.5 m;
静态差分精度 水平:±(2.5 +1×10−6D)m;
垂直:±(5 + 1×10-6D)m;
(3)双频RTK动态差分精度:
水平:±(10 +1×10−6×D)m(GPS);
±(10+1×10−6×D)m(BDS);
±(10+0.5×10−6×D)m(GPS+BDS);
垂直:±(20 +1×10−6×D)m(GPS);
±(20+1×10−6×D)m(BDS);
±(20+0.5×10−6×D)m(GPS+BDS);
(4)信号跟踪:
冷启动<50 s;
温启动<30 s;
热启动<15 s;
RTK初始化时间:<20 s;
信号重捕获:<2 s;
时钟精度:20 ns;
可靠性:大于99.9%;
更新率:1 Hz、2 Hz、5 Hz、10 Hz、20 Hz选配。
-
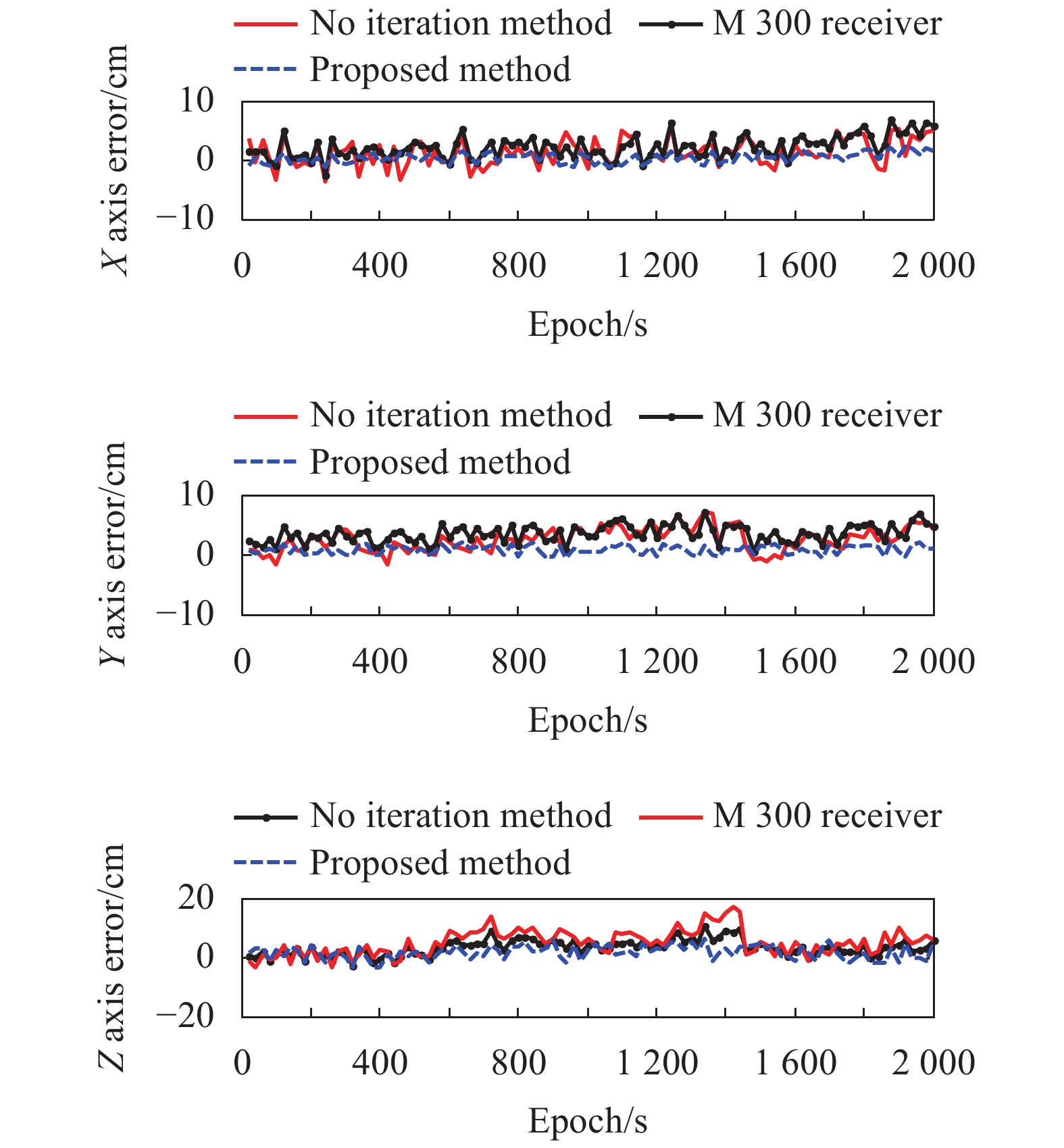
2016年10月,笔者所在课题组有幸参加某研究所空投试验项目,主要承担空投物资的落点轨迹分析及落点位置估算,并与真实的落点位置进行验证。课题组选用北京强度环境研究所生产的M300 GPS/BDS接收机,于2016年10月12日10时25分至2016年10月12日15时50分时间段多次进行空投试验采集数据,采集频率为60 Hz,其中GPS采用 L1频点卫星信号,BDS采用 B1、B2频点卫星信号,接收机的坐标已知。在MATLAB环境中分别运用此章介绍的无迭代GPS/BDS伪距组合定位算法、有迭代GPS/BDS伪距组合定位算法进行组合定位,并与M300 GPS/BDS接收机得到的组合定位精度进行对比,从各分方向定位误差、定位散点图、均方根误差等方面分析定位结果,得到文中所设计GPS/BDS组合定位算法与M300 GPS/BDS接收机在X、Y、Z方向误差对比如图8所示,散点相互对比如图9所示。
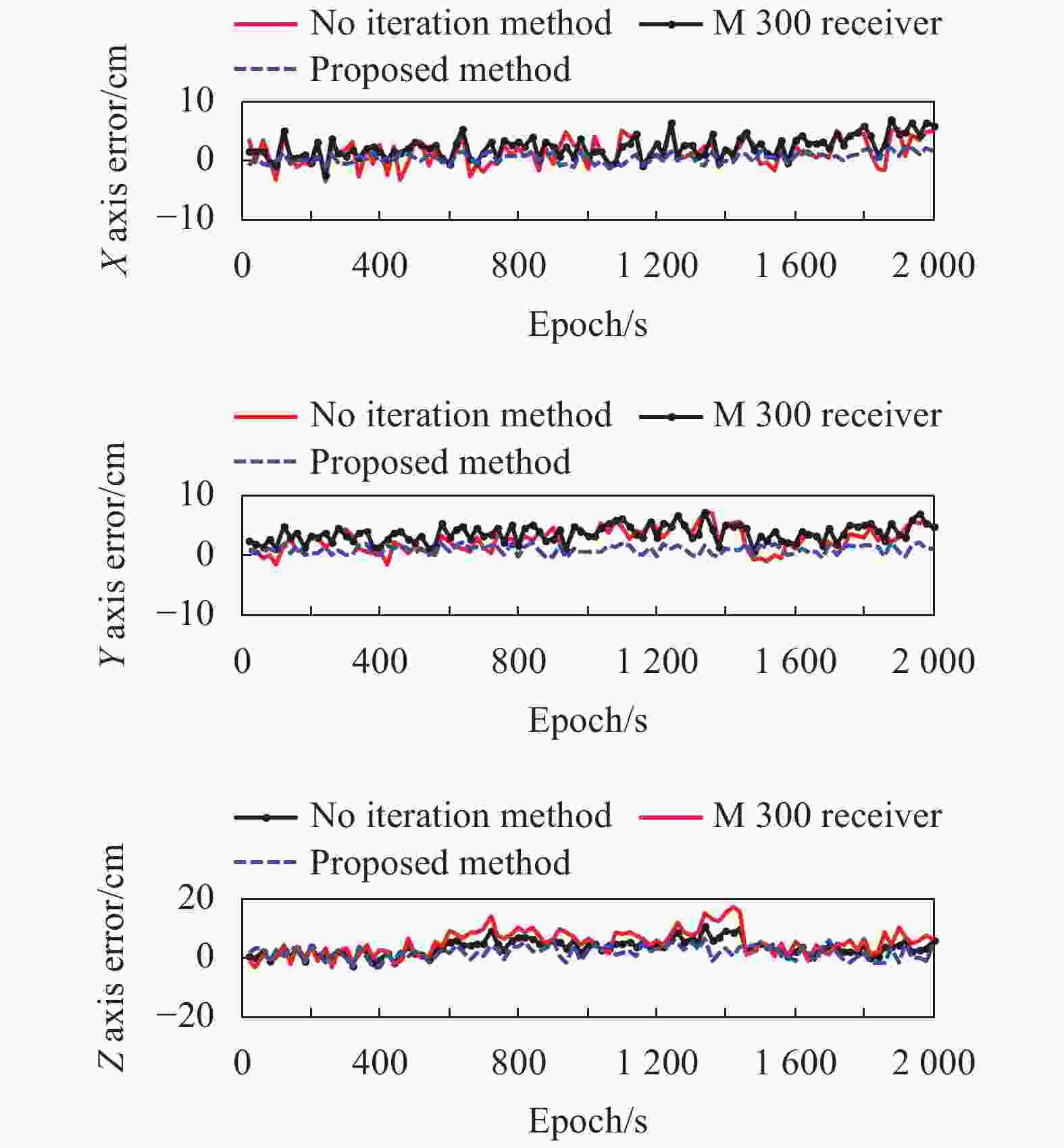
Figure 8. Error diagram of GPS/BDS pseudorange combination positioning
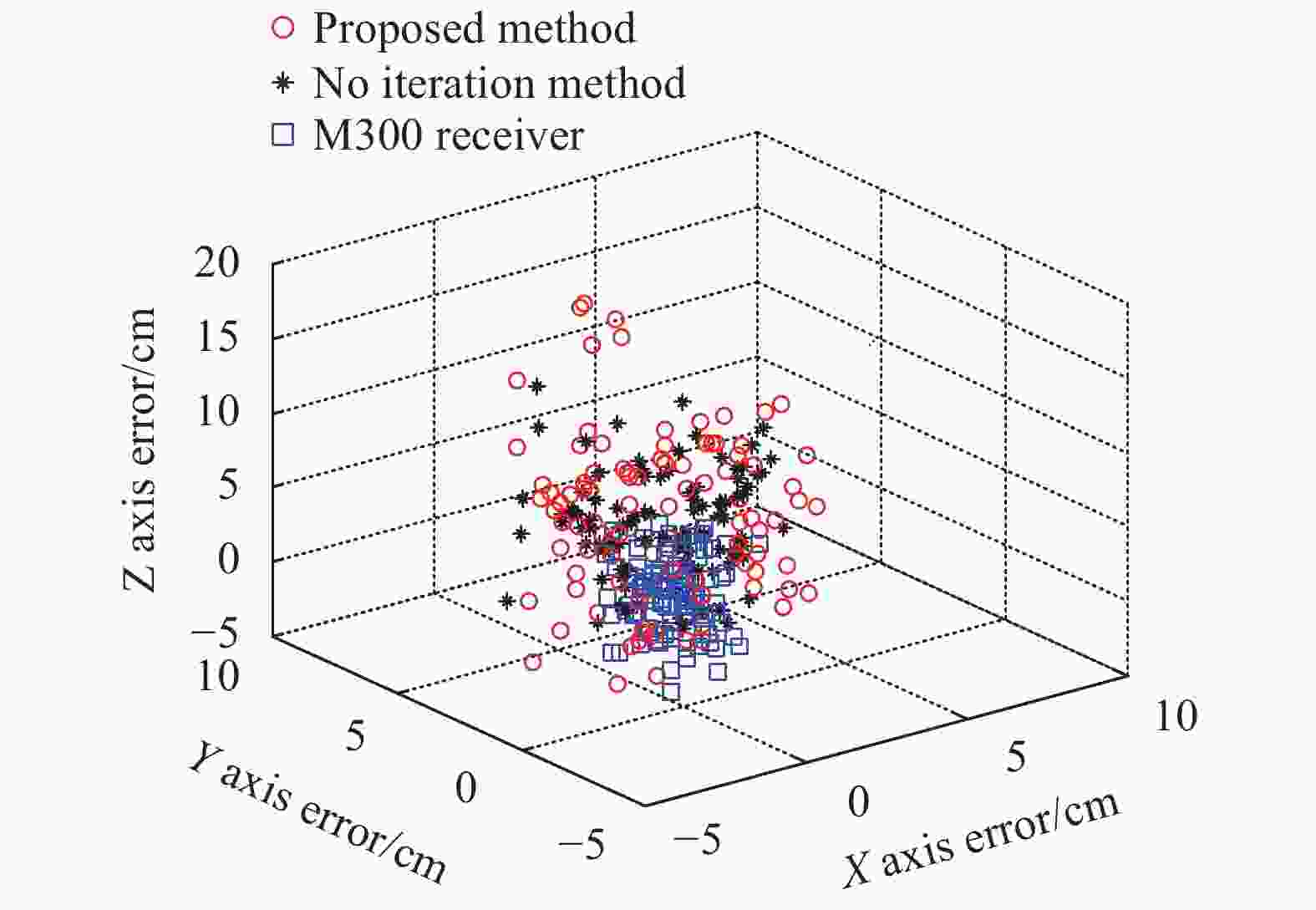
Figure 9. Scatter diagram of GPS/BDS pseudorange combination positioning
从定位解算的结果来看,使用文中设计的有迭代GPS/BDS伪距组合定位算法进行组合定位在X、Y、Z三轴向均方根误差(RMS)值分别为1.28 m、1.61 m、1.49 m;使用无迭代GPS/BDS伪距组合定位算法进行组合定位在X、Y、Z三轴向均方根误差(RMS)值分别为1.37 m、1.92 m、3.23 m;使用M300 GPS/BDS接收机进行定位在X、Y、Z三轴向均方根误差(RMS)值分别为2.02 m、2.53 m、3.32 m。从仿真图形和解算误差结果来看,不管是单轴向还是三维位置分析,虽然实际工程试验比实验仿真精度低,但GPS/BDS伪距组合定位算法均能够起到优化定位效果的作用,使得定位结果整体表现稳定性提升,平滑性更好、更准确,尤其是有迭代GPS/BDS伪距组合定位算法表现更优。
为了进一步验证文中所设计GPS/BDS伪距组合定位算法对于GNSS定位精度的提升,文中选取了若干篇近三年来研究GPS/BDS伪距组合定位算法的参考文献,将文中所述算法的定位精度与其进行对比,如表2所示。
Table 2. Precision comparison of the traditional algorithm and the proposed algorithm
从表2中可以看出,与选取的参考文献中的算法相比较,文中所述算法的定位精度要优于近年来其他学者提出的同类算法,进一步说明了文中所述算法的有效性。
-
在开展基金课题研究中,进行了大量的理论推导与实验仿真,从理论和实验两方面均验证了所设计算法的有效性,并结合了具体工程项目中的真实试验数据进行了解算结果分析,验证了所设计算法的真实有效。经过仿真分析,文中所述算法的定位精度要优于近年来其他学者提出的同类算法,算法运行过程简洁高效,可实施性强,试验设计切合实际应用场景,可以为相关领域提供参考,具有一定的理论意义和实用价值。
Design and verification of multi-mode GNSS pseudo-range combined positioning method
doi: 10.3788/IRLA2021G006
- Received Date: 2021-03-27
- Rev Recd Date: 2021-04-29
- Publish Date: 2021-06-30
-
Key words:
- multi-mode /
- GNSS /
- pseudo-range /
- combined positioning /
- attitude matrix /
- position matrix
Abstract: In a complex geomorphic environment where satellite signals are severely interfered with, due to the small number of visible satellites and poor satellite signal quality, the accuracy of single-mode satellite positioning and navigation has been unsatisfactory, especially for dynamic navigation and positioning accuracy. In order to improve the accuracy of dynamic navigation and positioning, a multi-mode GNSS pseudo-range combined positioning algorithm was designed, which belonged to an iterative combined positioning algorithm. The initial iterative weight matrix was determined by the height angle priori weight model, and the weight was the smallest. In the process of the two multiplication method, the posterior model was estimated by the variance component, and the weight matrix was continuously updated iteratively to obtain the accurate position of the target. The algorithm needed to rely on the initial value and multiple iterations, but the positioning accuracy was better than the Gauss-Newton iterative algorithm and Helmert variance component estimation method. Experimental simulation results show that compared with Gauss-Newton iterative algorithm and Helmert variance component estimation method, the positioning accuracy of the algorithm designed in this paper is improved by 45.1% and 23%, respectively. Finally, combined with the actual airdrop test analysis, it is shown that the algorithm described in this paper can accurately calculate the drop point of the airdrop material, which can provide a reference for the aircraft navigation system designer, and has certain theoretical significance and practical value.











































































































 DownLoad:
DownLoad: