






-
激光参数综合诊断系统是我国开展惯性约束聚变(ICF)研究的某大科学装置的分系统之一[1],是一个高精度、多功能的激光参数诊断平台,用来精密诊断大型激光装置输出光束的特性参数,包括能量、近场、远场、时间波形、波前分布等。激光参数综合诊断系统的终极目标是基于纹影法的原理实现高功率激光强度时空分布的测量,为未来大型激光装置的频率转换组件[2]和强激光远场分布的测量提供理论指导和精确实验参数。
对于大型激光装置强激光远场光强的测量方法,国内外的学者开展了大量的研究工作。国外学者所采用的方法主要有直接测量法[3]、阵列探测法[4]、间接测量法[5-6]、数字微镜器件法[7]等。2007年,美国NIF装置使用高动态范围CCD 直接对远场分布进行测量[3];2008年,美国Aegis 公司研制了用于测试长距离传输的激光束光强分布的目标靶[4],适合对于大尺寸、连续辐射的强激光光束光强的测量;2008年,罗切斯特大学研制了OMEGAEP焦斑诊断系统[5-6],该装置是通过先测量近场波前和光强,再依据衍射理论计算远场分布的间接测量法,该方法与计算成像的发展方向一致;2012年,Fiorito R B等人使用数字微镜器件法实现远场分布的测量[7],该方法需要根据预判的光强分布特征来确定反射型的掩模的“遮挡”区域。
国内学者提出的方法主要有纹影法[8]、衍射光栅法[9]、光场相机法[10]等。2006年,程娟首次提出利用纹影法测量激光远场[8]。2012年,贺元兴等人提出基于衍射光栅的激光远场测量方法[9],从理论上分析了该方法在拓展CCD动态范围、提取远场焦斑高频旁瓣信息的有效性。2018年,李铭提出了基于光场相机的远场测量方法[10],所设计的测量系统可以快速适应焦斑形态的变化。
对于强激光远场测量数学模型的研究,王拯洲和夏彦文等人做了大量的研究工作。2014年,提出了基于纹影的高动态范围激光焦斑测量数学模型[11-12],获得了大型激光装置的强激光远场分布图像。2017年,提出了基于纹影的强激光远场测量自动重构方法[13],该方法适合主瓣和旁瓣图像同时存在明显的相似纹理的情况。2020年,提出了基于远场测量数学模型改进的CNN去噪方法[14],在数学模型中引入DnCNN去噪算法,作为提高基于纹影的强激光远场测量精度的重要手段。
随着大型激光装置的建成和物理实验的逐步深入开展,发现该装置主要存在远场强信号、弱信号同时探测这一矛盾和旁瓣光束弱信号区域无法精确测量的问题。针对以上矛盾和问题, 2022年,王拯洲等人提出了基于旁瓣光束衍射反演的纹影法强激光远场测量方法[15],以旁瓣光束衍射光强图像和相位图像作为输入,通过计算获得未遮挡前旁瓣光束远场分布。该方法虽然经过衍射反演获得了旁瓣光束的分布图像,但是未能实现对旁瓣光束任意方向上各个旁瓣波峰参数的有效检测,缺少对于旁瓣弱信号区域每个旁瓣波峰参数的量化,不仅影响对任意方向、任意位置旁瓣光束分布参数的度量,而且影响从整体上对于旁瓣光束分布特征的评价。因此,对于旁瓣光束弱信号区域旁瓣波峰的检测主要存在以下几个需要解决的问题:(1)如何检测旁瓣光束图像任意方向、任意一个像素点的旁瓣波峰参数;(2)任意方向的一维旁瓣曲线需要检测哪些波峰参数;(3)如何从整体上评价一个旁瓣光束的旁瓣波峰参数。
对于一幅旁瓣光束衍射反演图像来说,旁瓣弱信号区域是从图像中心向外半径逐渐增大的圆环,圆环的灰度值从高到低依次减小;观察旁瓣光束衍射反演三维图像,旁瓣弱信号区域是从中心向外波峰和波谷相间的、波峰灰度值依次降低的、波峰间隔大致相等的多个立体的圆形环[16];而一维旁瓣分布曲线的旁瓣弱信号区域是从中心向外灰度值从大到小的多个波峰,且极小值大致相当的多个波谷。因此,对于旁瓣波峰参数的检测,就需要以角度作为自变量,在角度采样间隔预先选定的条件下,通过检测每一个角度一维旁瓣分布曲线的波峰参数,当完成对所有方向上的一维旁瓣分布曲线的波峰参数检测后,就实现了对整个旁瓣图像旁瓣波峰参数的检测。
根据旁瓣波峰分布特征,需要检测旁瓣光束弱信号区域中的任何一个像素点的旁瓣波峰参数,主要检测和量化以下特征:(1)任何一个像素点相对旁瓣图像中心的XY坐标、角度方向信息;(2)任何一个像素点所在旁瓣波峰编号对应的区间,即第一波峰还是第二波峰;(3)任何一个像素点所在旁瓣波峰的具体位置,即位于上升沿、下降沿、峰值位置,还是波谷位置;(4)任何一个像素点所在位置的Y方向参数,即灰度值;(5)任意一个像素点所在旁瓣波峰的X方向参数,包括上升沿和下降沿、脉冲宽度等。
对于旁瓣光束图像来说,不仅需要检测任意一个像素所对应的旁瓣波峰的参数,更重要的是需要检测整个旁瓣图像的最小可测波峰信号值,因为最小可测信号值是计算远场动态范围比值的重要依据,是衡量旁瓣光束分布特征的一个重要综合性参数。然而,由于旁瓣光束图像存在噪声,为了降低噪声信号对于最小可测波峰信号值的影响,采用概率统计的思想,选择360°方向上某一个可识别的旁瓣波峰极大值环的平均值作为整个旁瓣光束的最小可测信号,这为整个远场动态范围比值的计算提供重要依据。
总之,为了对旁瓣光束弱信号区域的旁瓣参数进行检测,文中提出了基于旁瓣光束衍射反演的远场测量旁瓣区域弱信号检测方法。主要思想是:对旁瓣光束图像按照选定的角度采样间隔进行量化,使用角度变换将二维旁瓣光束图像转化为全方向的一维旁瓣光束曲线集合,检测每个角度一维旁瓣光束曲线的各个旁瓣波峰参数,从而获得旁瓣光束任意方向各个旁瓣的参数。重点考虑统计两类参数:(1)统计所有方向的每个旁瓣波峰的极大值,用来生成每个旁瓣波峰极大值圆环;(2)统计每个旁瓣波峰极大值圆环的灰度均值,选择大于本底噪声1.5倍的最小旁瓣波峰极大值圆环的灰度均值为整个旁瓣光束的最小可测旁瓣波峰信号。实验结果表明:该方法能够有效检测旁瓣光束任意方向各个旁瓣的参数,任意方向上每个旁瓣波峰灰度极大值与理论灰度极大值误差小于0.477。该方法提高了基于旁瓣光束衍射反演的远场测量方法的实验精度和可信度,为将来大科学装置强激光远场的精确测量奠定基础。
-
在大型激光装置参数测量综合诊断系统中,使用分光系统将主光路分为主瓣光路和旁瓣光路。主瓣光路经过大倍率光束衰减器件和主瓣聚焦透镜后使用主瓣CCD直接采集主瓣光路分布图像;旁瓣光路依次经过旁瓣聚焦透镜1、纹影小球、旁瓣透镜2,最后使用旁瓣CCD采集旁瓣光路分布图像。该光路设计存在一个理想化的假设,即认为被纹影小球遮挡的旁瓣光束遮挡区域的光强分布为零,认为非遮挡区域的光强分布不变。
然而,根据光学衍射理论可知,旁瓣光束光场的传播在绕过纹影小球这个障碍物后,后面的旁瓣光束光场已经是一个发生了衍射作用的衍射场。当旁瓣光束被纹影小球遮挡后(如图1中黑色圆),先被纹影小球衍射,再传输至CCD成像位置时,CCD成像位置的旁瓣衍射光束分布与未遮挡前的旁瓣光束分布已经发生了巨大的变化。
根据衍射逆运算理论,反演准确的未遮挡前的旁瓣光束分布,需要以旁瓣光束衍射光强图像和相位图像作为输入。因此,基于旁瓣光束衍射反演的纹影法远场测量光学系统设计方案如图1所示。使用分束镜splitm将主光路分为主瓣和旁瓣光束,主瓣光束被大倍率衰减后使用主瓣CCD直接测量主瓣区域强信号区域;在旁瓣光束的靶点位置放置纹影小球遮挡旁瓣光束中心区域,靶点后使用旁瓣分束镜splitp对旁瓣光束进行二次分光,分光比例为1∶1,旁瓣光路1使用旁瓣CCD测量旁瓣衍射光束的振幅信息,旁瓣光路2使用Hartmann传感器测量旁瓣衍射光束的相位信息。旁瓣光束衍射反演的目的就是以旁瓣光束衍射光强图像和相位图像作为输入,通过衍射反演公式(14)的运算,获得未遮挡前(o点)的旁瓣光束远场分布图像。
需要说明是,在光学平台搭建过程中,需要保证旁瓣CCD和Hartmann传感器距离靶点之间的光程必须相等,如图1中,用公式表示为l2+l3=l4。

Figure 1. Optical design for far field measurement of focus spot using schlieren method based on diffraction inversion of sidelobe beam
-
依据参考文献[15],基于旁瓣光束衍射反演的强激光远场测量的主要思想为:采用逆向推演间接测量的研究方法,沿光路传播逆方向推导,以旁瓣光束衍射光强图像和相位图像作为输入,通过计算获得未遮挡前旁瓣光束的远场分布。因此,在该测量方法中,真正未衍射以前的及未遮挡(o点)的旁瓣光束远场分布图像是由旁瓣CCD采集光强图像和Hart-mann传感器相位图像相结合,沿旁瓣光束传播的逆方向推导,由衍射反演公式的运算获得,该方法与目前流行的间接测量的思想和方法相一致。
假设CCD采集到的旁瓣光束图像I'p_dn(xi,yj),Hartmann传感器采集到的旁瓣光束的波前相位分布图像为ϕ'p_dn(xi,yj),依据衍射逆运算理论,未衍射前的及未遮挡(o点)的旁瓣光束远场分布图像为I'IDiff_p(xi,yj),用公式表示为[17-18]:
式中:U'p_dn(xi,yj)为旁瓣光束衍射反演光强分布函数I'p_dn(xi,yj) 的复振幅表示形式,用公式表示为:
公式(2)中ϕ'p_dn(xi,yj)为量化的旁瓣光束的波前相位分布图像,在使用旁瓣光束衍射反演前需要对旁瓣光束的波前相位分布图像进行去噪处理,公式(1)中
$IRs({x_i},{y_j}) = {{\rm e}^{ - j\tfrac{{2\pi }}{\lambda }z\sqrt {{{(1 - \lambda {x_k})}^2} + {{(1 - \lambda {y_k})}^2}} }}$ ,$ IRs $ 是一个低通滤波器,该滤波器与光束传播距离z相关,λ为波长,z表示CCD相机测量位置和纹影小球中心之间的距离,FFT和IFFT分别表示二维傅里叶变换和二维傅里叶逆变换。 -
由于每个光束的旁瓣区域包含多个波峰波谷,对旁瓣信号的检测需要检测每个旁瓣的波峰值、波峰位置、上升沿、下降沿以及每个波谷的位置。一维旁瓣曲线(Y=256)波峰参数检测主要步骤为:(1)检测各波峰极大值[18];(2)检测各个波谷位置[19];(3)各个波峰区域分割;(4)上升沿、下降沿、脉宽、灰度积分计算。
-
根据极大值的定义:假设旁瓣光束一维曲线函数为
$ f(x) $ ,其导数为$ {f'}(x) $ ,如果$ {x_0} $ 点导数值为0,即$ {f'}({x_0}){\text{ = }}0 $ ,当$ x \lt {x_0} $ 时,$ {f'}({x_0}) \gt 0 $ ;且当$ x \gt {x_0} $ 时,$ {f'}({x_0}) \lt 0 $ ,则$ f({x_0}) $ 为极大值,$ {x_0} $ 为极大值位置。由于待检测旁瓣光束一维曲线为经过量化的数字曲线$ f({x_i}) $ ,离散点数量为N,波峰极大值检测不仅需要考虑导数$ {f'}({x_i}) $ ,还需要考虑波峰检测时的两个重要参数:波峰最小阈值Th和波峰之间的最小间距D。波峰极大值搜索主要步骤为:(1)
$ f({x_i}) $ 一阶求导对于离散的旁瓣光束一维曲线
$ f({x_i}) $ 来说, f(xi)与f(xi+1)的升降关系使用$ f({x_i}) $ 的导数$ f_{}'({x_i}) $ 来确定,由于相邻坐标xi+1和xi 之间差值为1,所以导数$ f_{}'({x_i}) $ 用公式表示为:(2)使用符号函数sign简化一阶导数
$ f_{}'({x_i}) $ 当
$ f_{}'({x_i}) $ >0时,表示f(xi)在xi位置为增函数,反之为降函数。为了方便统计f(xi)在相邻区域内增函数或者降函数的个数,对一阶导数$ f_{}'({x_i}) $ 执行符号函数sign操作。用公式表示为:当
$ f_{}'({x_i}) $ >0时,$f_{\rm sign}'({x_i})$ =1;当$ f_{}'({x_i}) $ <0时,$f_{\rm sign}'({x_i})$ =−1;当$ f_{}'({x_i}) $ =0时,$f_{\rm sign}'({x_i})$ =0。(3)对符号函数
$f_{\rm sign}'({x_i})$ 进行二次求导为了获得f(xi)所有潜在的极大值位置
${f_{\rm peaks}}({x_i})$ ,对一阶导数$ f_{}'({x_i}) $ 的符号函数$f_{\rm sign}'({x_i})$ 进行二次求导,用公式表示为:(4)搜索所有潜在极大值点
搜索所有潜在极大值点的条件为
$f_{\rm sign}{''}({x_i})$ =−2,即当$f_{\rm sign}{''}({x_i})$ =−2时,xi为潜在极大值点,潜在极大值个数表示为P。相邻二阶导数满足:当$f_{\rm sign}{''}({x_{i + 1}})$ =0,f(xi+2)和f(xi+1)为连续下降点,当$f_{\rm sign}{''}({x_{i - 1}})$ =2时,f(xi)相对f(xi-1)为上升点。(5)裁剪
$ f({x_i}) $ 小于阈值Th的数据点,当$f({x_i}) \lt T h$ 时,设置 f(xi)=-1,Th为需要检测的峰值最小阈值。(6)删除所有潜在波峰满足
$f_{\rm sign}{''}({x_i})$ =−2位置xi附近半径D以内的位置点,用公式表示为:式中:D为波峰之间的最小间距;N为一维旁瓣曲线离散点个数。
(7)统计潜在的所有极大值位置
$ {p_j} $ 将
$ {p_j} $ 的每一项初始值置0,j的取值范围为[1,···, P],用公式表示为:(8)统计真实的极大值点个数Q
删除
$ {p_j} $ 中所有小于等于0的项,满足条件$ {p_j} $ >0的所有$ {p_j} $ 为真实的极大值位置$ {p_m} $ ,用公式表示为:式中:Q为真实的极大值点个数;m取值范围为[1,···,Q]。
(9)获得最终的波峰极大值位置
$ {p_m} $ 将
$ {p_m} $ 按照升序进行排列,则$ {p_m} $ 为最终的波峰极大值位置列表,$ f({p_m}) $ 为旁瓣光束一维曲线的波峰灰度值。为了简化数学公式,将步骤(1)~(9)的推导数学公式(3)~(8)封装为SearchPeaks函数,则波峰极大值搜索函数用公式表示为:
式中:
$ f({x_i}) $ 为旁瓣光束的一维曲线;Th为最小阈值,默认选择极大值的1%;D为波峰之间的最小间距,默认值为20。由于旁瓣光束分布在理论上是对称的,因此,使用SearchPeaks函数检测旁瓣光束一维曲线f(xi)右半部分(255<= xi<=512)的各个波峰参数信息。先检测右半部分,是因为从左到右,第1、第2、第3、第4、第5波峰的峰值依次减少,能够将前三个旁瓣波峰的参数放在更加突出的位置。左半部分波峰极大值检测方法和右半部分相似。
-
为了重复利用波峰检测方法,对于旁瓣光束一维曲线进行反转运算,用公式表示为:
式中:
$ T({x_i}) = \max (f(x)) - f({x_i})) $ 表示对原始旁瓣光束一维曲线进行反转运算;SearchPeaks为波峰搜索函数;$ {t_n} $ 表示波峰位置,即水平方向坐标。$ T({t_n}) $ 表示反转运算后的旁瓣光束一维曲线的第n个波峰值,n的取值范围为[1 Q1],Q1为反转运算$ T({t_n}) $ 的波峰个数。由于反转函数
$ T({x_i}) $ 的各个波峰位置$ {t_n} $ 与原始旁瓣光束一维曲线$ f({x_i}) $ 的波谷位置一一对应,因此,$ {t_n} $ 表示$ f({x_i}) $ 的波谷位置,$ f({t_n}) $ 为一维曲线$ f({x_i}) $ 的波谷灰度值。 -
对一个确定的波峰位置pm来说,一个波峰区域的分割是由该波峰两边的波谷位置决定的。搜寻波谷的位置,是为计算上升沿、下降沿的宽度、脉冲宽度做准备。任意原始旁瓣光束一维曲线
$ f({x_i}) $ 的各个波峰区域分割用公式表示为:式中:
$ {s_{n - 1}} $ 为峰值位置pm对应波峰的紧邻左波谷位置,$ {s_n} $ 为峰值位置pm对应波峰的紧邻右波谷位置;式中m的取值范围为[1 Q];n的取值范围为[1 Q1]。 -
对每一个波峰来说,上升沿的宽度是波峰位置减去紧邻左边波谷的位置,下降沿是紧邻右边波谷的位置减去波峰位置。该波峰的脉宽是紧邻右边波谷的位置与紧邻左边波谷的位置之差。
通过各个波峰区域分割,第m个波峰对应的波峰位置为pm,第m个波峰对应区间为 [sm−1 sm],第m波峰的脉冲宽度=sm−sm−1+1,上升沿区间为[sm−1 pm],上升沿宽度为pm−sm−1+1,下降沿区间为[pm sm],下降沿宽度=sm−pm+1。那么,第2个波峰对应的波峰位置为p2,第2个波峰对应区间为 [s1 s2],第2波峰的脉冲宽度为s2−s1+1,上升沿区间为[s1 p2],上升沿宽度为p2−s1+1,下降沿区间为[p2 s2],下降沿宽度为s2−p2+1。
第m个波峰的灰度积分为第m波峰区间 [tm−1 tm]所有像素灰度之和,其物理意义为激光功率密度随位置分布的积分值,用公式表示为:
-
依据衍射反演理论,理想的旁瓣光束是一个完全对称的二维分布图像。但是,在真实的远场测量实验中,旁瓣光束在经过长距离传输后,需要经过多个光学元件的反射、透射、分光过程,每个光学元件对于最终的远场分布都会产生影响。此外,旁瓣光束衍射反演中采集的旁瓣光束衍射相位图像和旁瓣光束衍射光强图像都是使用CCD采集获得,包含不同程度的随机噪声,再经过DnCNN去噪处理,通过反演运算的旁瓣光束衍射反演图像具有以下特征:(1)旁瓣光束反演图像并不是理想的、完全对称分布的二维旁瓣光束分布图像;(2)在任意一个方向上的一维分布曲线与水平曲线是完全不同的;(3)在旁瓣光束反演图像中,图像中心并不是纹影小球的中心,两者存在一定的偏差,需要对旁瓣光束反演图像进行校正,使得图像中心和纹影小球中心相重合;(4)由于光学元件的影响,在特殊情况下,旁瓣光束弱信号区域存在多个不规则的孔状区域,并不是标准的波峰环。
基于以上原因,对于旁瓣光束反演图像,即旁瓣光束弱信号的检测是十分必要的,必要性表现为:(1)能够对旁瓣光束反演二维图像进行量化表示;(2)能够检测二维图像在任意方向的、各个波峰参数的分布特征;(3)旁瓣图像相比主瓣图像属于能量较弱的多个环状的震荡信号,量化各个方向的、各个波峰的弱信号分布特征对于衡量远场光束的质量具有重要意义[17];(4)检测所有方向、各个波峰参数后,统计每个波峰环的统计特性,波峰灰度均值、方差、波谷灰度均值、方差,以及波峰环半径等,能够从整体上掌握旁瓣光束,即远场光束的统计特征和光束质量;(5)准确检测旁瓣光束最小可测波峰值,是计算远场重构焦斑动态范围比值的重要依据。
旁瓣光束弱信号检测的主要目的是在旁瓣光束反演图像中的信号区域识别各个旁瓣波峰信号,并计算各个旁瓣波峰的波峰参数。为了降低旁瓣区域弱信号检测的难度,首先检测一维旁瓣曲线(Y=256) 各个波峰信号的分布值和分布特征;其次,再检测任意方向的一维旁瓣曲线的各波峰信号的分布值和分布特征,从而实现整个旁瓣光束波峰参数的检测。
对旁瓣信号来说,一维旁瓣曲线(Y=256)的主要检测对象是旁瓣区域内各个波峰信号的分布值和分布特征,因此,旁瓣弱信号检测时,需要同时检测波峰信号的峰值和峰值所在的位置,即旁边弱信号检测不仅需要检测旁瓣信号在Y方向的灰度值,而且要检测旁瓣峰值在X方向的位置。在理论旁瓣光束中,旁瓣信号包含很多个旁瓣波峰,其中有效的旁瓣信号为第一、第二、第三、第四旁瓣信号,每个旁瓣信号之间间隔相对很小,主要通过检测各个波峰或者波谷在小范围内的极大值和极小值来实现各个波峰区间的分割。对于一个旁瓣波峰来说,需要检测的参数为:上升沿、下降沿、脉宽、波峰和波谷灰度值、波峰和波谷位置、灰度积分等。
基于旁瓣光束衍射反演的远场测量旁瓣波峰参数检测方法数据处理共包含四部分:(1)旁瓣光束图像获取;(2)角度变换;(3)检测任意方向一维光束曲线旁瓣的波峰参数;(4)整个光束旁瓣波峰特征参数统计。旁瓣波峰参数检测数据处理流程如图2所示。

Figure 2. Flow chart of data processing
在旁瓣光束衍射反演实验条件下,以旁瓣光束衍射相位去噪图像(如图3(a)所示)和旁瓣光束衍射光强去噪图像作为输入(如图3(b)所示),使用公式(2)进行反演运算,获得真正未衍射前的及未遮挡的旁瓣光束分布二维和三维图像(如图3(c)和(d)所示)。
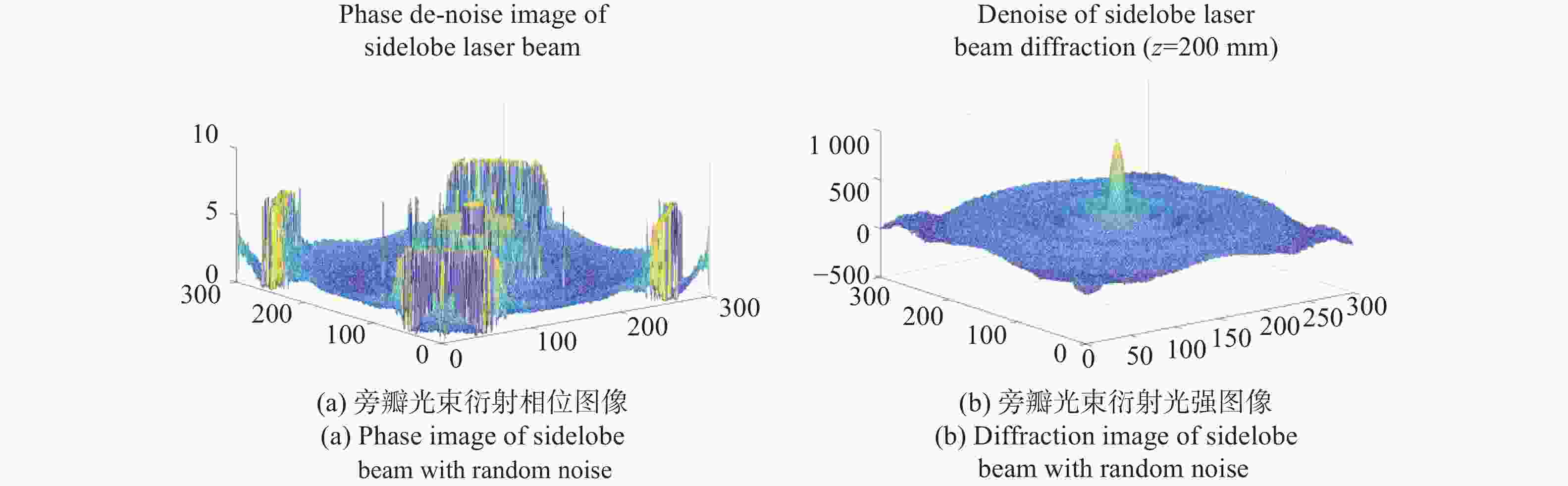

Figure 3. Image of sidelobe beam diffraction inversion
-
旁瓣光束传输至图像采集位置前,需要经过一次主光路分光、二次旁瓣光束分光、纹影小球遮挡、旁瓣光束衍射。在真实实验条件下,旁瓣CCD采集获得旁瓣光束衍射光强图像,Hartmann采集获得旁瓣光束衍射相位图像,两个图像都包含随机噪声。在仿真实验条件下,等效措施是对经过两次分光、纹影小球遮挡、旁瓣光束衍射的仿真旁瓣光强和相位图像分别增加均方差为10、50的随机噪声。对旁瓣光束衍射相位图像、旁瓣光束衍射光强图像使用参考文献[14]所示的改进DnCNN算法进行去噪处理,如图3(a)、(b)所示。
为了准确获得未遮挡前的旁瓣光束分布,就需要以旁瓣光束衍射相位去噪图像(见图3(a))和旁瓣光束衍射光强去噪图像(见图3(b))作为输入,通过反演运算获得真正未衍射前的及未遮挡的旁瓣光束分布二维和三维图像,如图3(c)和(d)所示。文中实验旁瓣CCD采集位置距离纹影小球中心位置200 mm。
-
假设原始旁瓣光束中心为
$ ({x_0},{y_0}) $ ,旁瓣光束CCD采集图像为$ f(x,y) $ ,任意角度为$ \theta $ ,则任意方向上的旁瓣光束一维曲线提取步骤如下。 -
由于旁瓣光束分布图像是尺寸为512×512的二维图像,任意角度上的旁瓣光束一维曲线所对应的曲线长度是不同的,当角度为0或者90°时,一维曲线的取值范围为[0 512];当角度为45°时,一维曲线的取值范围为[0
$512\times \sqrt 2$ ]。根据旁瓣光束的分布特征,即旁瓣光束分布图像是一个圆形的、多个环状、主瓣中心圆形区域灰度为0的二维分布图像,对于任意角度的旁瓣光束一维曲线,只有选取旁瓣光束水平方向最大尺寸R=512之内的图像数据,才是有效的一维分布曲线,因此,选择旁瓣光束一维曲线取值范围为[0 512]。 -
为了提取所有方向上的旁瓣曲线,需要将二维旁瓣图像依据角度间隔大小进行采样,提取一维曲线总数量SampleNum与角度采样间隔DltAngle 密切相关,两者之间的关系式为SampleNum =360/DltAngle。
为考虑方便计算,将采样数量确定为360的整数倍,文中实验选择角度间隔DltAngle=0.5°,则采样数量=720,每一角度将提取两条旁瓣光束的一维曲线。
-
(1)右半边一维旁瓣曲线提取
当提取右半边一维旁瓣曲线时,角度取值范围0≤angle<180°,则任意角度旁瓣光束一维曲线XY方向坐标,用公式表示为:
式中:(x0, y0)表示旁瓣图像中心坐标;r表示距离中心坐标(x0, y0)的距离,0=<r≤256;RealX, ReaY表示角度为angle的一维曲线距离中心(256, 0)为r的位置在原始旁瓣图像f(x,y)相对于(0,0)的坐标值。
右半边一维旁瓣曲线提取公式为:
式中:r的取值范围为[0 256×1.414]=[0 263],因为一维曲线g的定义域为[0 512],只对256+r<512对应的f(RealX, RealY)进行赋值。
(2)左半边一维旁瓣曲线提取
当提取左半边一维旁瓣曲线时,所提取的旁瓣光束曲线位置点位于任意角angle加180°的方向,即任意角angle沿旁瓣光束中心位置点(x0, y0) 的对称点位置,则任意角度旁瓣光束一维曲线XY方向坐标,用公式表示为:
左半边一维旁瓣曲线提取公式为:
式中:0<=256−r<256,只对一维曲线g(x)定义域在[0 256)对应的f(RealX,RealY)灰度值进行赋值。综合以上方法,将任意方向上的旁瓣光束一维曲线提取用公式表示为:
式中:f表示二维旁瓣光束分布函数;angle表示角度,取值范围[0 360°];g表示任意角度的一维旁瓣光束曲线,定义域为[0 512]。
(3)提取所有方向旁瓣光束一维曲线,构建角度变换图像
在获得任意方向上的旁瓣光束一维曲线后,就可以根据公式(3)~(12)所示方法计算任意方向上各个旁瓣波峰的参数进行检测,特定角度的旁瓣光束一维曲线波峰检测方法与水平方向一维曲线(Y=256)波峰检测方法是完全相同的。
为了体现旁瓣光束所有方向各个波峰信号的分布特征,对二维旁瓣光束图像不同的角度间隔(0.5°)在所有向上(0~360°)进行采样,可以获得720条旁瓣光束的一维曲线。然后对720条一维曲线分别使用公式(3)~(12)的方法检测各旁瓣波峰的参数,角度变换图像如图4所示。当度采样间隔为0.5°时,所有方向共提取720条旁瓣光束的一维曲线,将所有的一维曲线保存在大小为720×512的矩阵G中,用公式表示为:
式中:G为所有方向旁瓣光束一维曲线集合。
Figure 4. Angle transformation image
-
使用文中提出的一维旁瓣曲线波峰参数检测数学模型,对于任意方向上一维光束曲线旁瓣波峰参数进行计算,主要步骤为:(1)检测各波峰极大值[18];(2)检测各个波谷位置[19];(3)各个波峰区域分割;(4)上升沿、下降沿、脉宽等参数的计算。文中实验选择角度为30°的一维旁瓣曲线为例来说明旁瓣波峰参数的检测过程,待检测原始一维旁瓣曲线(Angle=30°)如图5(a)所示。

Figure 5. Parameter detection of sidelobe peak of one-dimensional beam curve in any direction
-
检测一维波峰曲线各个波峰的灰度极大值和位置是对各个波峰进行分割和识别的关键,对每一个波峰的灰度极大值是一个完整波峰区间内的极大值,位置是该极大值对应的X坐标。波峰分割和识别需要预先确定最小高度(Min Peak Height, MPH),两个峰值间的最小间隔(Min Peaks Distance, MPD),当每个波峰灰度值大于最小高度时才认为是有效波峰,当两个相邻波峰之间的距离大于最小间隔时才认为是两个独立的波峰,从而可以过滤掉单调周期内的干扰极值。根据先验知识,文中实验选择最小高度为整个一维曲线极值的8%,最小间隔为20 pixel。各波峰极值检测结果如图5(b)所示,从图中可以看出,共检测到16个旁瓣波峰,每个波峰极大值位置用红色*号标识,每个波峰编号用数字标识,波峰编号1~16。其中11~16为一维旁瓣曲线右半边波峰,其中第一~第五波峰编号为11~15,1~7为坐一维旁瓣曲线左半边波峰,其中第一~第五波峰编号为7-1,编号8、9、10波峰位于旁瓣光束中心区域,是由随机噪声产生的干扰信号,不参与旁瓣波峰的分割和参数的计算。
-
任意方向上的一维旁瓣光束曲线的旁瓣区域不仅包含多个波峰,也包含多个波谷,其中一个波峰左边和右边分别对应两个波谷,检测一维波峰曲线各个波谷的灰度极小值和位置是为计算上升沿、下降沿的宽度、脉冲宽度做准备,是对各个波峰进行分割和识别的重要依据。
为了简化对各个波谷的极大值和位置的检测步骤,需要将原始一维旁瓣曲线进行反转处理,用公式表示为:反转一维旁瓣曲线灰度=原始一维旁瓣曲线极大值-原始一维旁瓣曲线灰度。这样,就可以重复利用旁瓣波峰极大值检测方法来检测反转一维旁瓣曲线的极大值,其中,每个极大值位置和原始一维旁瓣曲线波谷位置相对应。使用该方法所检测的原始一维旁瓣曲线波谷灰度值和位置如图5(c)所示。
从图中可以看出,共检测到16个旁瓣波谷,每个波谷极小值位置用绿色*号标识,每个波谷编号用数字标识,波谷编号1~19。其中13~19为一维旁瓣曲线右半边波谷,其中第一波峰对应的左右波谷编号为13和14,第二波峰对应的左右波谷编号为14和15。1~7为一维旁瓣曲线左半边波谷,其中第一波峰(左)对应的左右波谷编号为6和7,第二波谷(左)对应的左右波谷编号为5和6。
-
在获得每个旁瓣波峰的左右两个波谷位置后,就可以对每个波峰进行区域分割,其目的是为了计算每个旁瓣波峰的上升沿、下降沿、脉冲宽度等参数。各个波峰区域分割结果如图5(d)所示,每个波峰分割位置使用粉色虚线标识。左半边第一波峰分割区间为波谷13和波谷14之间区域,右边第一波峰分割区间为波谷6和波谷7之间区域,其他波峰区间为该波峰左右波谷之间区域。右半边和左半边一维曲线都分割出五个波峰,从中间向两边,依次为第一~第五波峰。
-
根据每个旁瓣波峰的波峰位置和左右两个波谷位置进一步分割每个波峰对应的上升区域、下降区域。分割结果如图5(e)所示,每个波峰的上升沿和下降沿分别用不同的颜色进行标识。右边第一波峰上升沿用红色曲线标识(Rise1),区间为[342 354],上升沿宽度为12,下降沿用绿色曲线标识(Fall1),区间为[354 370],下降沿宽度为17,脉冲宽度为29;右两边第二波峰上升沿用粉色曲线标识(Rise2),区间为[370 381],上升沿宽度为11 ,灰度积分为7515.5,下降沿用品色曲线标识(Fall2),区间为[381 395],下降沿宽度为15,脉冲宽度为26,灰度积分为3749.9。右边其他波峰、所有波峰的上升沿、下降沿、脉宽、灰度积分、波峰位置、波峰灰度值等参数见后面实验中的噪声条件下的参数表。第三波峰上升沿和下降沿分别用黄色黑色曲线标识,其他波峰上升沿和下降沿分别用红色绿色曲线标识。
-
在矩阵G中,每一行数据代表一个角度一维旁瓣曲线,对每条一维旁瓣曲线使用公式(2)~(5)方法进行检测,可以获得每条曲线每个旁瓣波峰的参数,包括波峰值、波峰位置、上升沿、下降沿、波谷位置等。
其中SearchPeaks函数用来搜索一维旁瓣曲线的波峰位置,每条曲线的所有波峰位置保存在矩阵P中,其中第1列~第5列分别为第一~第五波峰波峰位置。所有方向旁瓣波峰位置搜索用公式表示为:
SearchPeaks为波峰搜索函数,返回值为五个波峰位置,矩阵P每一行对应每一角度间隔采样下的五个波峰位置,则第一波峰对应的波峰灰度信息为G(No,P(No,1)),…,第五波峰对应的灰度信息为G(No,P(No,5)),No为角度编号,取值范围为0≤No<720,则每个角度中每个波峰对应的XY
坐标用公式表示为: 式中:X和Y为大小为720×5的矩阵,每一行保存角度编号为No的五个波峰XY坐标;X矩阵的第一列~第五列依次为第一~第五波峰位置的X坐标、Y矩阵的第一列~第五列依次为第一~第五波峰位置Y的坐标。
-
所有一维曲线的第一波峰可以获得720个极大值,将所有的极大值对应的坐标位置用曲线进行连接,则生成一个第一波峰极大值曲线环;同理,第二、第三、第四波峰同样可以获得720个极大值,将每一波峰的720个极大值对应的坐标位置用曲线连接,可以生成第二、第三、第四波峰极大值曲线环。通过波峰曲线环,可以分析每个波峰在不同方向的分布情况,如果该波峰对应的波峰极大值曲线环越接近与理想圆,说明该波峰能量变化越小,光束质量越好;如果该波峰对应的波峰极大值曲线环越曲折,说明该波峰能量变化越大,旁瓣光束质量越差。
将每个角度对应的一维旁瓣曲线的第一波峰位置XY的坐标连接生成一条曲线,则生成了第一波峰极大值曲线环,同理,每个角度对应的一维旁瓣曲线的第二至~五波峰位置XY的坐标连接分别生成一条曲线,则生成了第二~第五波峰极大值曲线环,结果如图6所示。
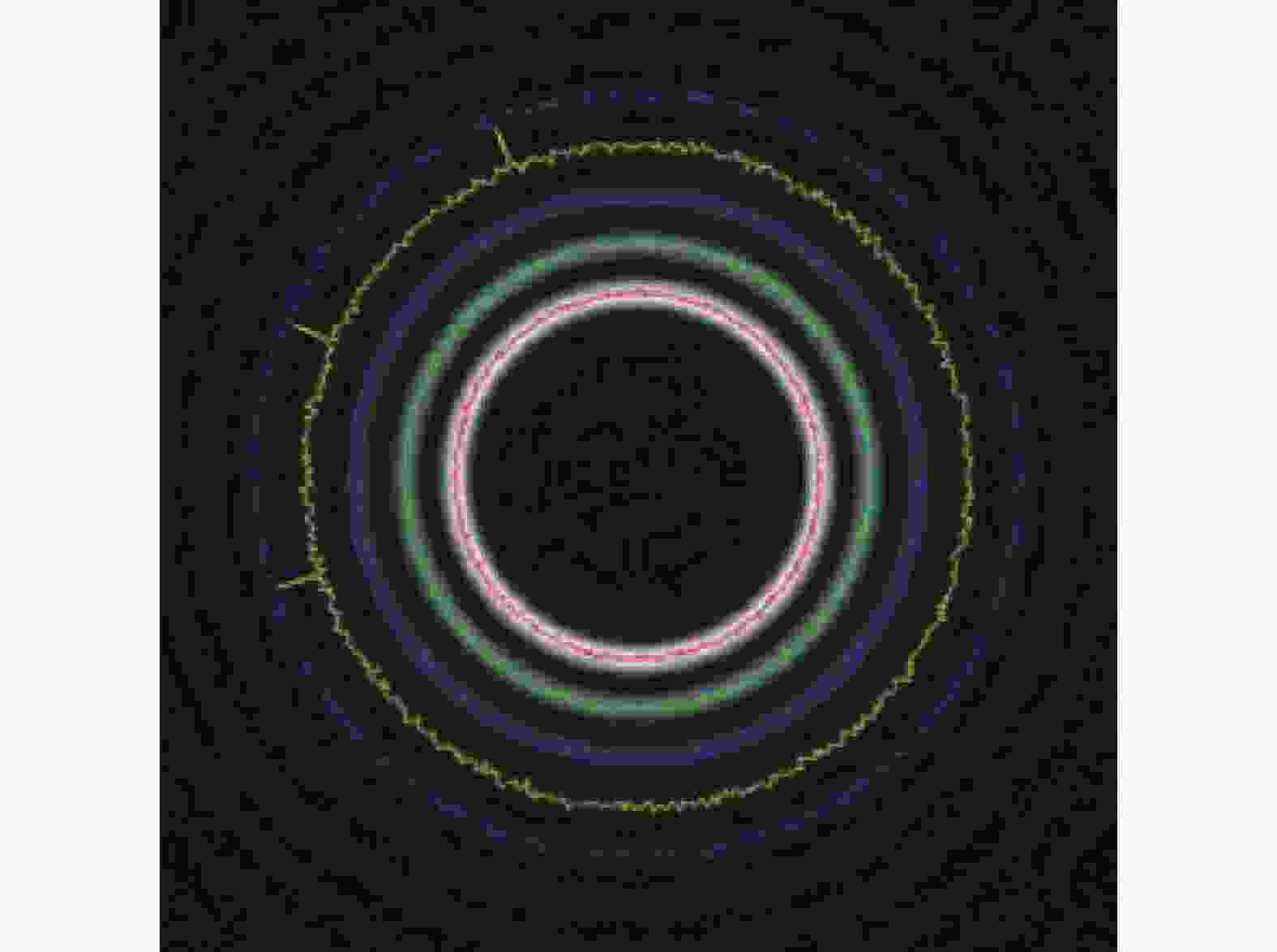
Figure 6. Maximum curve rings of each sidelobe peak
每个波峰极大值曲线环的形状体现了每一个波峰在不同方向上的极值分布情况,每个波峰极大值曲线环越接近于理想圆环,说明每个波峰在不同方向上的极值分布越均匀;每个波峰极大值曲线环越曲折,说明每个波峰在不同方向上的极值分布越不均匀、分布突变越大。
对于每个波峰来说,第一波峰半径最小,第二~第五波峰半径依次增大,而每个波峰曲线圆环之间的间隔DltRadius大体上是相等的,约等于27。每个波峰曲线环像涟漪一样从中心向外逐渐散开。为了从整体上衡量每个波峰的分布特征,分布计算每个波峰灰度极大值的均值,用公式表示为:
式中:
$ \mathop {Pea{k_1}}\limits^{\_\_\_\_\_\_\_} $ 、$ \mathop {Pea{k_2}}\limits^{\_\_\_\_\_\_\_} $ 、…、$ \mathop {Pea{k_5}}\limits^{\_\_\_\_\_\_\_} $ 分别为第一~第五波峰环的均值。波峰均值是用来计算整个光束远场动态范围比值的重要依据。 -
根据基于纹影法远场测量的原理[8],远场动态范围定义为远场主瓣图像的最大值与旁瓣光束最小可测旁瓣波峰信号的比值,用公式表示如下:
式中:D表示远场的动态范围;
$ {C_{\max }} $ 表示重构图像的最大值;$ {S_{\max }} $ 表示旁瓣光束最小可测旁瓣波峰信号。其中旁瓣光束最小可测峰值信号最终选择是根据实际检测来确定的。噪声越小,则选择更外围的旁瓣峰值,如第四或第五波峰均值;噪声越大,则选择中间旁瓣波峰均值作为旁瓣光束最小可测旁瓣波峰信号,如第二或第三波峰;当第二~第五波峰被全部淹没在噪声中时,选择第一波峰环的均值作为旁瓣光束最小可测旁瓣波峰信号。
-
为了对比文中旁瓣信号检测方法的有效性,文中实验首先对理论旁瓣信号进行检测。使用文中方法对理论旁瓣信号(Y=256)的检测结果如图7和表1所示。从表中可以看出,共检测到五个旁瓣信号,对于右边五个旁瓣波峰来说,旁瓣的波峰灰度值从左向右依次降低,分别是573.59、278.61、156.61、96.31、63.55。每个波峰的脉冲宽度大致相等,约等于27。每个波峰的灰度积分分别是7209.5、3666.9、2055.2、1266.2、834.9。对于左边五个波峰来说,旁瓣的波峰从右向左依次降低,分别是573.59、278.61、156.61、96.31、63.55,每个波峰灰度积分分别是7209.5、3666.9、2055.2、1266.2、834.9。从图7和表1中可以看出,第一波峰灰度积分最大,第二波峰次之,第三个波峰次之。

Figure 7. Theoretical one-dimensional curve to detect the parameters of sidelobe peak (Y = 256)
Side lobe
No.Peak
No.PosX/
pixelPeak value
(gray)Rise/fall/
pixelPulse width/
pixelEnergy integral
(gray)Peak
No.PosX/
pixelPeak value
(gray)Rise/fall/
pixelFulse width/
pixelEnergy integral
(gray)Left Right 1 5 160 573.59 15/8 24 7209.5 6 354 573.59 8/15 24 7209.5 2 4 133 278.61 15/13 28 3666.9 7 381 278.61 13/15 28 3666.9 3 3 107 156.61 15/12 27 2055.2 8 407 156.61 12/15 27 2055.2 4 2 81 96.31 15/12 27 1266.2 9 433 96.31 12/15 27 1266.2 5 1 54. 63.55 14/13 27 834.9 10 460 63.55 13/14 27 834.9 Table 1. Detected parameters of sidelobe peak of theoretical one-dimensional curve (Y=256)
在真实的旁瓣图像采集中,旁瓣CCD采集的图像是包含噪声的图像,假设旁瓣CCD采集图像是包含了均方差为10的旁瓣图像,其中噪声最大值为45.77,理论旁瓣信号最大值为573.59,噪声最大值与理论旁瓣信号最大值之比为45.77/573.59=0.0798。也就是说,噪声信号最大是旁瓣信号理论值的7.98%。

Figure 8. Detected peak and trough position of one-dimensional sidelobe noise curve (Y = 256)
Sidelobe
No.Peak
No.PosX/
pixelPeak value
(gray)Rise/fall/
pixelFulse width/
pixelGray integral
(gray)Peak
No.PosX/
pixelPeak value
(gray)Rise/fall/
pixelFulse width/
pixelGray integral
(gray)Left Right 1 6 159 556.51 13/19 32 7523.9 11 354 543.42 14/17 31 7515.5 2 5 132 293.17 14/15 29 3768.9 12 381 290.45 11/15 26 3749.9 3 4 106 168.14 17/13 30 2214.8 13 407 162.31 12/16 28 2002.7 4 3 84 91.01 19/6 25 1294.4 14 431 121.49 9/26 35 1580.4 5 2 56 81.59 20/10 30 1092.7 15 459 82.87 3/22 25 697.2 Table 2. Detected parameters of each sidelobe peak of one-dimensional noise curve (Y=256)
从图8中可以看出,噪声对于旁瓣区域弱信号检测有一定影响,能够准确检测出第一~第五波峰,波峰位置使用如红色*标示,右半边如编号11~15所示,左半边如编号6~2所示。右边第六波峰(编号16)完全淹没在噪声中,左边第六波峰(编号1)也被淹没在噪声中。特别是在主瓣区间[177-340],也检测出几个极大值点,这是由随机噪声所造成的,根据先验知识,主瓣区域的理论值为0,因此,需要将主瓣区域的极大值点舍弃。图中除检测到所有波峰的极大值位置以外,每个波峰的波谷位置使用绿色*标示,编号如黑色字体1~19所示。对于左半边旁瓣曲线来说,第一波峰的波谷位置的左右编号分别为6和7,左右位置为146和177,脉冲宽度为32,上升沿和下降沿分别为13和19,极大值位置为159,极大值为556.51,灰度积分为7523.9。对于右边旁瓣曲线来说,第一波峰的波谷位置的左右编号分别为13和14,左右位置为342和370,脉冲宽度为31,上升沿和下降沿分别为14和17,极大值位置为354,极大值为543.42,灰度积分为7515.5。其他波峰的参数信息如表2所示。
将表1理论旁瓣信号(Y=256)的检测结果与表2噪声条件下的旁瓣区域弱信号(Y=256)检测结果进行比较,可以看出,噪声对于旁瓣区域弱信号检测有一定的影响。影响最大的是Y方向的波峰灰度值,其中左半边第一波峰灰度值增量为560.03−573.6= −13.57,而右半边第一波峰灰度值增量为556.5−573.6=−17.1,由此可见,噪声对于波峰灰度值影响结果非常大,
有效的去噪处理算法对于旁瓣区域弱信号的检测是十分必要的。然而,幸运的是,噪声对于X方向波峰的位置信息检测结果影响较小,其中第一波峰位置误差小于1,脉冲宽度误差小于1。
-
在真实的远场测量实验中,旁瓣光束在经过长距离传输后,需要经过多个光学元件的反射、透射、分光过程,每个光学元件对于最终的远场分布都会产生影响。真实的远场并不是完全对称分布的图像,任意一个方向上的一维分布曲线与水平曲线是完全不同的。因此,对于旁瓣光束一维曲线弱信号的检测,不仅需要检测水平方向、垂直方向的各个波峰参数,而且需要检测任意方向上的各个波峰参数。然而,虽然理想的远场是一个包含多个同心环状的二维分布曲线,任意方向上的波峰参数检测,首先需要将二维的环状焦斑按照不同角度提取出来。
将每个角度对应的一维旁瓣曲线的第一~第五波峰位置XY坐标连接生成一条曲线,则生成了第一~第五波峰极大值曲线环。第一~第五波峰的极大值曲线环的检测结果如图9所示。
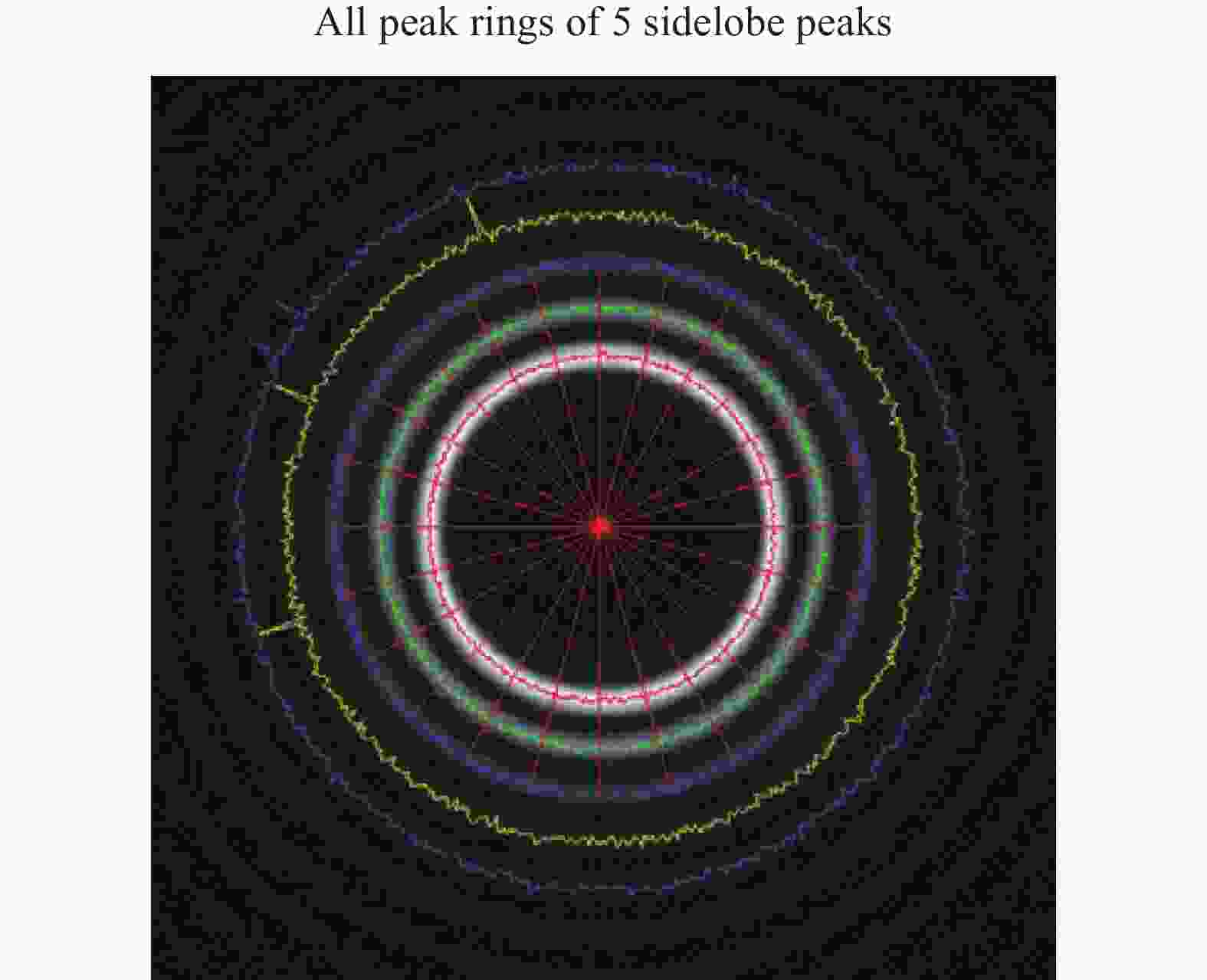
Figure 9. All maximum curve rings of each sidelobe peak
从图9中可以看出,每个极大值曲线环呈环状分布。从内向外依次为第一、第二、第三、第四波峰极大值曲线环,依次使用红色、绿色、蓝色、黄色曲线标识。其中第一波峰极大值曲线环半径最小,如红色曲线所示,第五波峰极大值曲线环半径最大,如蓝色曲线所示。观察曲线环的分布特征可以看出第一波峰极大值曲线环越接近于理想圆环,从内至外,曲线环边缘越曲折,也就是极大值偏离理想曲线环的两边越远,与理想曲线环半径的误差越大。产生这种半径越大、误差偏离越大的原因主要为:(1)内部曲线环的极大值相比噪声信号强度较大,外部曲线环的极大值相比噪声信号强度较小;(2)曲线环极大值越大,噪声对极大值位置检测结果影响越小,曲线环极大值越小,噪声对极大值位置检测结果影响越大,当曲线环极大值与噪声信号相差不大时,极大值信号将被淹没在噪声中,则极大值位置将无法准确检测出;(3)半径越大,外围波峰曲线环相邻角度编号两个极值点的距离越远,则显得外围的波峰曲线环越曲折。五个波峰环的检测结果如图9所示。
为了从整体上掌握旁瓣光束每个旁瓣波峰的分布特征,将五个波峰极大值曲线环的灰度极大值均值(如公式(21)中的
$ \overline {Pea{k_i}} $ )与理论灰度值进行比较。结果如表3第八列(Peaks/Mean)、第九列(Peaks/Theory)、第十列(Peaks/error)所示。可以看出,灰度极大值均值和理论灰度值之间的误差非常小,最小误差为0.036,最大误差为0.477。根据公式(22)对于动态范围比值的定义,大于本底噪声1.5倍的最小“波峰均值”为整个旁瓣光束的最小可测旁瓣波峰信号,如公式(22)中的Smax,该波峰均值即为波峰极大值曲线环的灰度极大值均值$ \overline {Pea{k_i}} $ 。由此可见,文中方法能够有效检测旁瓣瓣光束最小可测旁瓣波峰信号Smin,从而有利于提高强激光远场动态范围比值D的精度。No. Radius/pixel Peaks (gray) Gray integral (gray) Min Max Mean Error Min Max Mean Theory Error Min Max Mean Error 1 95 102 97.47 −0.53 526.64 600.39 573.243 573.590 −0.350 14573 15726 15080 661 2 121 129 124.81 −0.19 249.76 318.95 279.127 278.610 0.430 6911.1 7883.2 7372.7 27.3 3 147 157 151 0.00 136.08 197.90 156.506 156.612 −0.102 3900.3 4735.0 4253.6 42 4 172 201 177.67 0.67 81.65 136.96 96.441 95.963 0.477 2665.5 3963.7 3173.5 682.7 5 201 224 204.55 1.55 51.56 116.53 63.586 63.554 0.036 1288.3 2002.2 1641.7 −86.1 Table 3. Statistics of distribution characteristics of 5 maximum curve rings
五个波峰极大值曲线环分布特征如表3所示。从表中可以看出,每个波峰极大值环半径最小值和最大值相差较大,第一~第五波峰的最大半径和最小半径之差分别为7、8、10、29、23,这说明第一~第五波峰极大值圆环半径的误差依次增大,对应的极大值位置与理论极大值位置的偏离越大,外围波峰环的极大值位置越离散。为了从总体上标识旁瓣光束第一波峰的总体位置,使用第一波峰极大值圆环半径的均值来定量表示第一波峰所有方向上的波峰位置距离中心坐标(x0,y0)的距离。第一波峰极大值圆环半径的均值为97.47,与理论值误差为−0.5319;第二波峰极大值圆环半径均值为124.81,与理论误差为−0.1917。对所有波峰来说,每个波峰极大值圆环半径的均值与理论值半径之间误差小于两个像素,第三波峰极大值圆环半径误差最小,值为0.0028,第五波峰极大值圆环半径误差最大,值为1.55。类似地,每个波峰灰度极大值与理论值灰度极大值小于2。
与每个波峰极大值圆环半径、灰度极大值所不同的是,每个波峰的灰度积分与理论灰度积分差别较大,其中第三波峰灰度积分误差最大为682.7,第二波峰灰度积分误差最小为27.3。造成灰度积分比例系数较大的主要原因为:在对远场旁瓣区域弱信号进行检测前,未经过去噪处理。由此可见,一定范围内的均方差噪声虽然对于任意角度旁瓣光束一维曲线的主要参数,如上升沿、下降沿、峰值、波峰位置的检测影响较小,但是,因为一维曲线的每个灰度值中都包含了未去除的噪声信号,对于灰度积分的误差影响较大。因此,对于包含噪声旁瓣图像进行去噪处理,对于提高旁瓣光束弱信号的检测精确是十分必要的。
为了说明旁瓣光束在任意方向上的各个旁瓣波峰参数的检测结果,对旁瓣波峰参数检测的方法,按照检测步骤进行分解,如图10所示。主要分为五个步骤:(1)角度变换;(2)任意方向一维旁瓣曲线波峰参数检测;(3)旁瓣波峰环分离;(4)每个旁瓣波峰环峰值检测和统计;(5)确定整个旁瓣光束的最小可测旁瓣波峰信号。

Figure 10. Detected parameters of each sidelobe peak of sidelobe beam in any directions
在图10中,第①列为旁瓣光束的二维图像,第②列为所有方向生成的角度变换图像,第③列为选择两个方向(30°和150°)一维旁瓣曲线波峰参数的检测结果。在旁瓣光束二维图像中,以o点为圆心位置,当采样角度等于30°时,对旁瓣光束二维图像沿着线段oa进行采样,将旁瓣图像①oa线段转换到角度变换图像②水平线段oa,将旁瓣图像①ob线段转换到角度变换图像②水平线段ob,其中o为起点,ab分别为终点。同理,当采样角度等于150°时,将旁瓣图像①oc和od线段转换到角度变换图像②水平线段oc和od。通过角度变换,将尺寸512×512的旁瓣光束二维图像转换成尺寸720×512的角度变换图像,在角度变换图像②中,每一行的角度变换图像对应0.5°旁瓣光束二维图像,第一行为0°,最后一行为359°,如第①列粉色箭头所示。
对于任意方向上一维旁瓣曲线各个波峰、波谷检测结果如第③列所示,其中选择两个最有代表性的方向30°和150°,从图中可以看出,每个波峰位置使用红色星号*和黑色字体标识,每个波谷位置使用绿色星号*和字体标识。第二行四个环是旁瓣光束四个旁瓣波峰区域环,从左至右依次对应第一、第二、第三、第四波峰区域环,区域环平均半径依次增大,区域环的宽度依次为31、26、28、35。从左到右,四个区域环分别与角度变换图像四个竖向的旁瓣波峰条纹(1,2,3,4)相对应,如粉色箭头所示。四个区域环中每个方向上的极大值曲线环分别如红色(第一波峰)、绿色(第二波峰)、蓝色(第三波峰)、黄色(第四波峰)曲线环所示。
-
针对大型激光装置强激光远场测量不能有效检测旁瓣光束弱信号区域各个旁瓣波峰参数的问题,文中提出了基于旁瓣光束衍射反演的远场测量旁瓣区域弱信号检测方法。主要优化措施为:(1)使用角度变换将二维旁瓣光束图像转化为全方向的一维旁瓣光束曲线集合;(2)检测每一个角度的一维旁瓣光束曲线的各个旁瓣波峰参数,统计所有方向的各个旁瓣峰值,生成每个旁瓣波峰的极大值圆环;(3)统计每个旁瓣波峰极大值圆环的灰度均值,将各个旁瓣波峰极大值圆环的灰度均值与本底噪声进行比较,选择大于本底噪声1.5倍的最小波峰均值为整个旁瓣光束的最小可测旁瓣波峰信号。总之,文中采用角度变换和生成任意方向极大值曲线环的方法进行远场测量旁瓣区域弱信号检测的研究,探索提高基于旁瓣光束衍射反演的远场测量旁瓣区域各个波峰参数准确测量的问题,对揭示动态范围比值的评价准则具有重要意义,为将来大科学激光装置的强激光远场的精确测量奠定了基础。
Detection method of sidelobe peaks parameter for far-field measurement based on the diffraction inversion of sidelobe beam
doi: 10.3788/IRLA20220281
- Received Date: 2022-04-21
- Rev Recd Date: 2022-05-31
- Publish Date: 2023-01-18
-
Key words:
- far field measurement /
- schlieren method /
- diffraction inversion of sidelobe beam /
- angle transformation /
- parameter detection of sidelobe peaks
Abstract: In order to solve the problem that high power laser far-field measurement can not effectively identify the parameters of each sidelobe peak in any direction of sidelobe beam, a detection method of sidelobe peak parameters of far-field measurement based on sidelobe beam diffraction inversion is proposed in this paper. The main idea is to quantify the sidelobe beam image according to a specific angle sampling interval, and convert the two-dimensional sidelobe beam image into a set of one-dimensional sidelobe beam curves in all directions by angle transformation, then detect the parameters of each sidelobe peak of one-dimensional sidelobe beam curve at each angle, so as to obtain the parameters of each sidelobe peak in any direction of sidelobe beam. The main optimization measures are as follows: (1) Convert the two-dimensional sidelobe beam image into a set of one-dimensional sidelobe beam curves in all directions by angle transformation; (2) Detect the parameters of each sidelobe peak of one-dimensional sidelobe beam curve at each angle, count each sidelobe peak in all directions, and generate the maximum rings of each sidelobe peak; (3) Count the gray mean values of the maximum rings of each sidelobe peak, compare the gray mean values of the maximum rings of each sidelobe peak with the background noise, and select the minimum peak mean value greater than 1.5 times the background noise as the minimum measurable sidelobe peak signal of the whole sidelobe beam. The experimental results show that this method can effectively detect the parameters of each sidelobe peak in any direction of the sidelobe beam. The error between the mean value of gray maximum value and the theoretical value of gray maximum value in any direction is 0.477, and the error between the mean value of the maximum ring radius and the radius of the theoretical value of 5 sidelobe peaks is less than 1 pixel. This method improves the experimental accuracy and reliability of far-field measurement of high power laser based on the diffraction inversion of sidelobe beam, and it will lay a foundation for the accurate measurement of the far field of the high power laser in the large scientific facility in the future.






















































































 DownLoad:
DownLoad: