







-
在诸如量子阱红外探测及红外焦平面探测器等红外系统中,通常需要机械制冷机提供低温环境,以降低信噪比,获取更好的探测器工作效率[1]。在20世纪80年代初,制冷机内原有的旋转电机结构被直线压缩机结构逐步取代,展现出制冷温度低、工作效率高、占用体积小等优点,因此被广泛应用于军工及航空航天领域[2]。当前的制冷机结构也存在一定的问题,其主要缺点为压缩机活塞正弦往复运动带来的振动问题。这一振动问题会导致红外探测器等设备偏离其光学系统预设的正常“焦深”值范围,致使光学系统成像模糊,严重影响后续的测量精度和分辨率[3];也有可能会引起其他设备的机械共振,给系统带来机械损伤等更加严重的后果[4]。
为了降低压缩机振动带来的影响,多个院校和科研院所提出了多种对制冷机振动的优化和抑制方法。其中一种基于自适应窄带陷波滤波器的自适应主动减振算法,通过不断调整驱动信号的幅度和相位来实现减振功能,极大地改善了制冷机原有的振动问题[4]。这一方法被在构成完整减振系统后能够被广泛应用于各类膨胀机和压缩机减振,具有良好的稳定性、收敛性和鲁棒性。
根据这一方法的机理,在逆变器开关驱动信号上叠加反向高频信号,由于是通过同样的驱动方式产生的信号,反向叠加进入基波驱动的高阶信号实际上也会带来新的谐波问题。这一高阶信号导致的谐波产生是由于在高频驱动状态下,制冷机的工作特性发生变化,其作为驱动电路负载的电气特性随之发生了根本性的变化,从近似阻性的负载转化为变化的阻感性负载。同时结合制冷机驱动电路的驱动方法特点,改变了高阶驱动下的制冷机两端电压和通过电流波形。针对阻感性负载的驱动方法曾在一些文章中被介绍,其中部分文章根据其工作输出特性分析了工作在感性负载下的工作特性,并提出了补偿策略[5-7],但其设计方法存在一定普适性问题;参考文献[8]中提出了五阶逆变器用于优化对负载的驱动,这一方法效果好,控制精确,能有效达到对负载的低谐波控制的目的,但存在控制阶数高,对晶体管的需求量大等问题;参考文献[9]提出了一种采用功率MOS管嵌入四象限开关实现的SPWM拓扑,通过控制振幅调制指数和频率调制比改善线路和负载电流的谐波分布。文中基于制冷机作为驱动的负载特性及逆变器的传统驱动方法的工作特性,提出了新的制冷机驱动方法,使其在高频驱动下不发生波形畸变,同时保证基频驱动时的输出波形稳定,并有优秀的总谐波失真(Total Harmonic Distortion, THD)特性。
-
通常红外用机械制冷机被分为电路-机械-热力学三部分[10],其内部一侧压缩机考虑其工作过程,经过简化等效为如图1所示的等效电路结构。
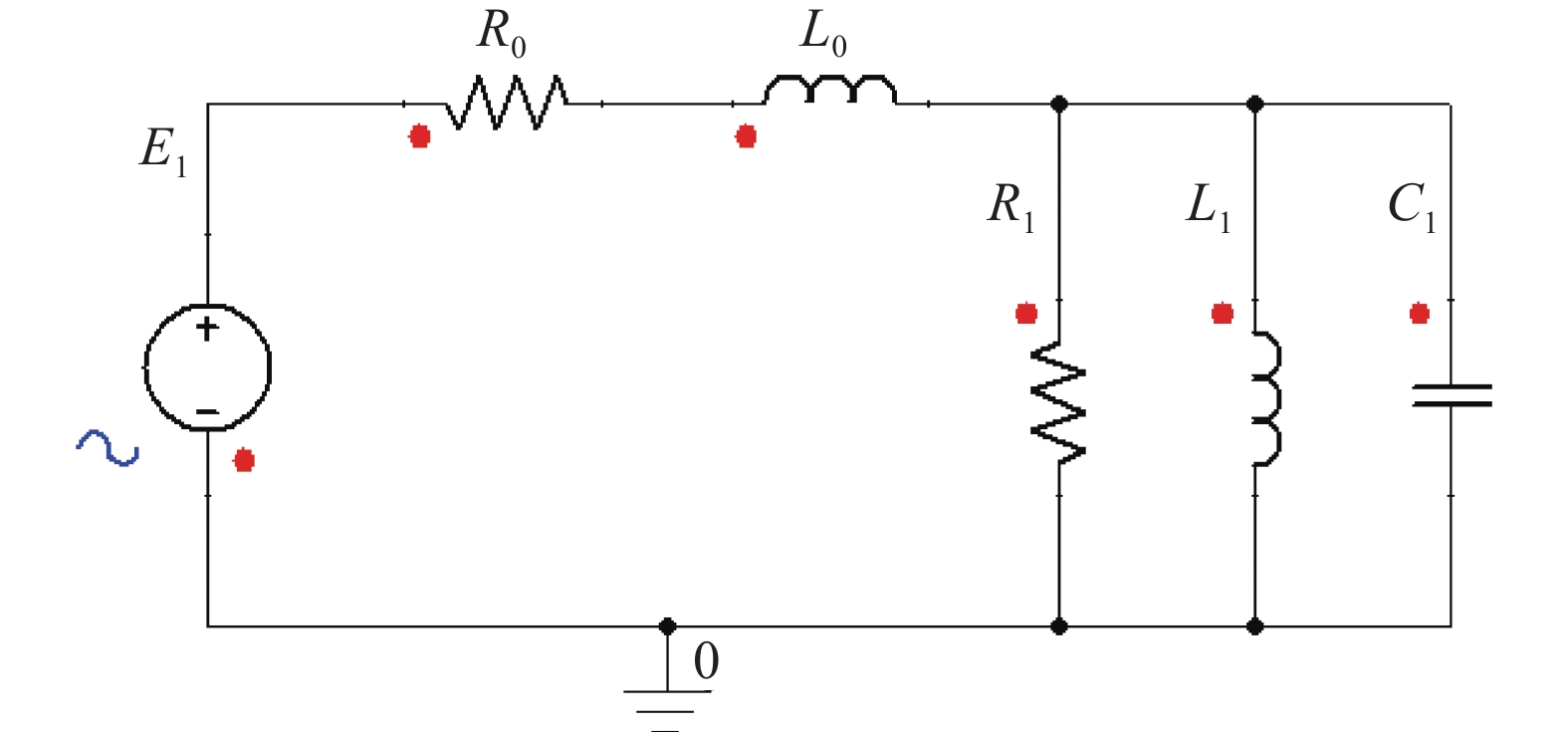
Figure 1. Equivalent circuit of single-side compressor of refrigerator
图中,R0为制冷机线圈电阻,L0为制冷机线圈的静态电感,R1为等效的摩擦系数(包括机械摩擦系数和气体等效摩擦系数),L1为等效的弹簧系数(包括机械弹簧系数和气体等效弹簧系数),C1为等效的运动活塞质量[11]。进一步将这一结构等效为一变化的电阻和电感串联,可以得到单个压缩机阻抗的表达式:
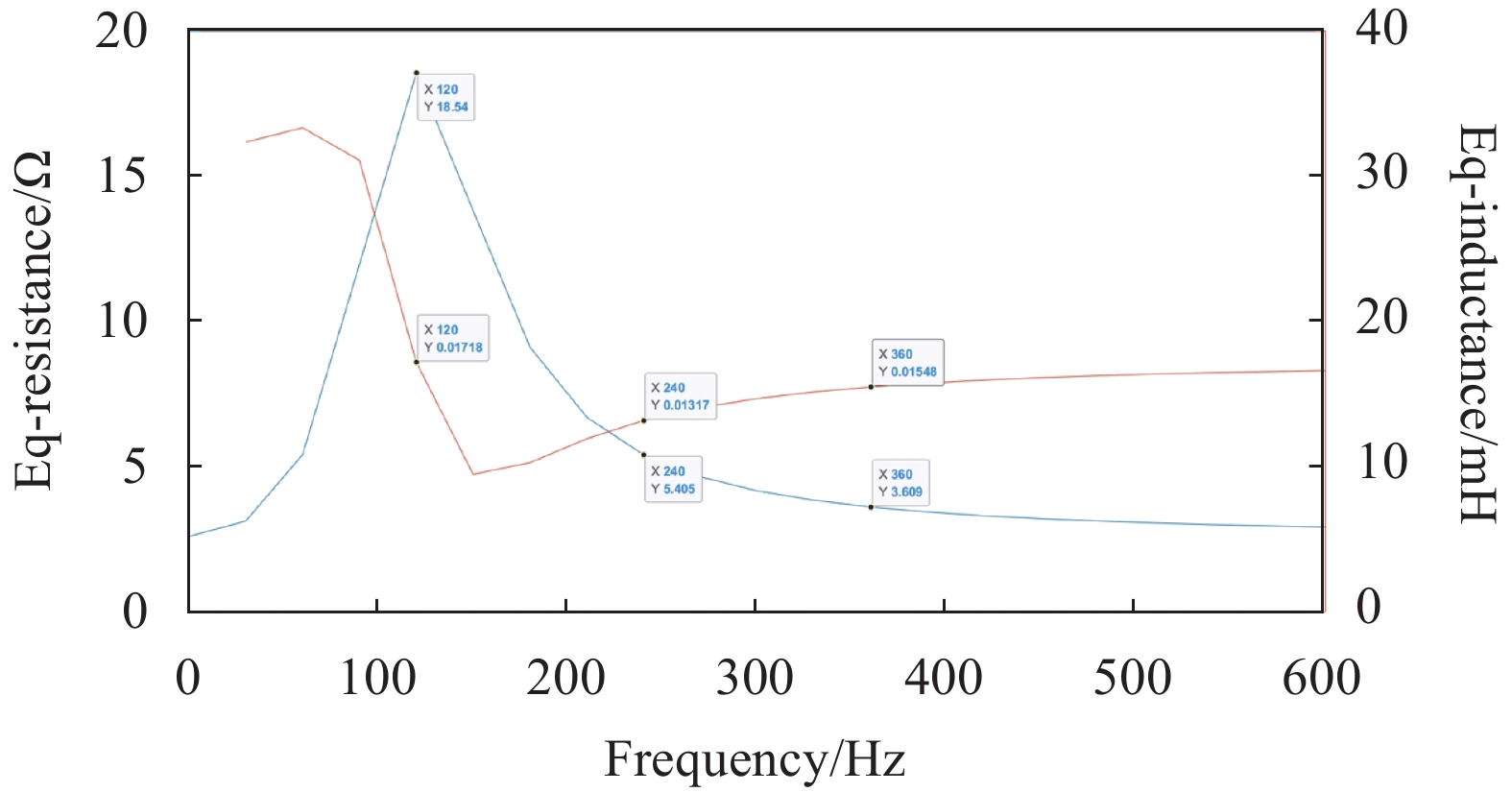
其中,L1和C1发生谐振处的频率为制冷机的系统能量转换效率最大点,通常定义这一谐振频率点为额定驱动频率点[12],在这一频率点上存在等效电阻Req的峰值和等效电感Leq的极小值,此时由于工作频率低且等效电感值小,负载制冷机在额定工作频率下的感性部分导致的相移也相当小,制冷机可以近似为一个大的电阻,在传统驱动方法下驱动的影响极小。当制冷机驱动频率提高时,等效电阻值快速降低,等效电感值逐渐提高,并在一定频率后分别稳定为一固定电阻值和电感值。因此,在基频驱动状态下,制冷机是以大电阻和小电感串联结构进行工作的;高阶驱动状态下,制冷机基本是以小电阻和大电感串联结构进行工作的。
以所应用的Redlich型动磁式制冷机为例,当其工作在180 K温区下,其单侧压缩机的等效电阻和等效电感变化特性如图2所示,其具体参数由后文实验部分给出。其中橙色为等效电感随频率变化大小的结果,蓝色为等效电阻随频率变化大小的结果,标记点为120 Hz和360 Hz频率点。

Figure 2. Variation results of equivalent resistance and equivalent inductance of compressor with frequency
可以看出,制冷机在基频处附近为等效电阻峰值,电感较小,以阻性特征为主;而在高频下电阻远小于基频,电感对比之下显得较大,呈现明显的感性特性。
-
传统制冷机逆变桥驱动电路如图3所示。

Figure 3. Traditional cryocooler drive full bridge inverter circuit
驱动电路包括两个PMOS上管和两个NMOS下管,为了便于信号控制,通常在PMOS管前增加自举电路。D1~D4分别为对应MOS管T1~T4自带的体二极管,通常可以在MOS管关断时行使续流功能[13]。
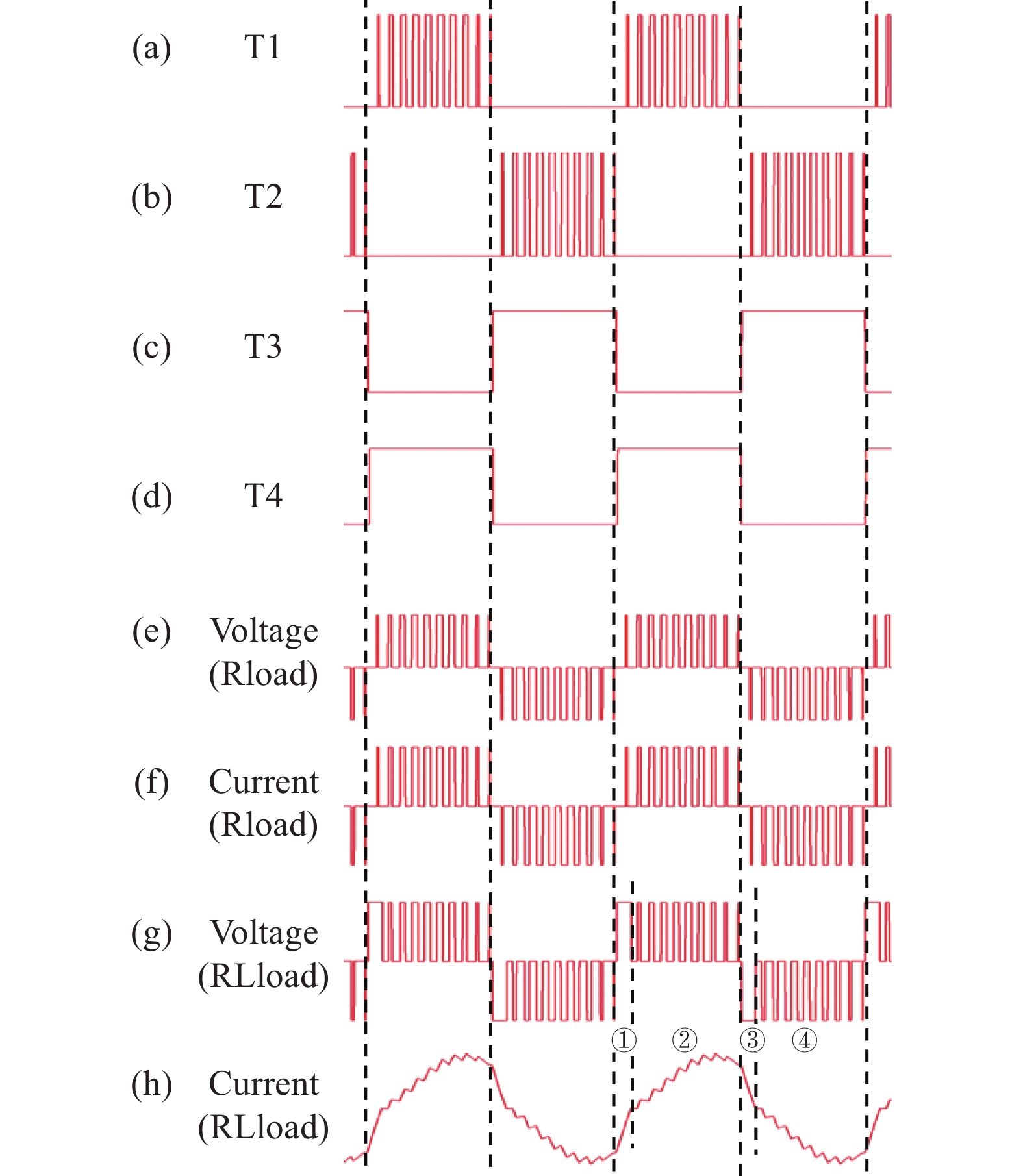
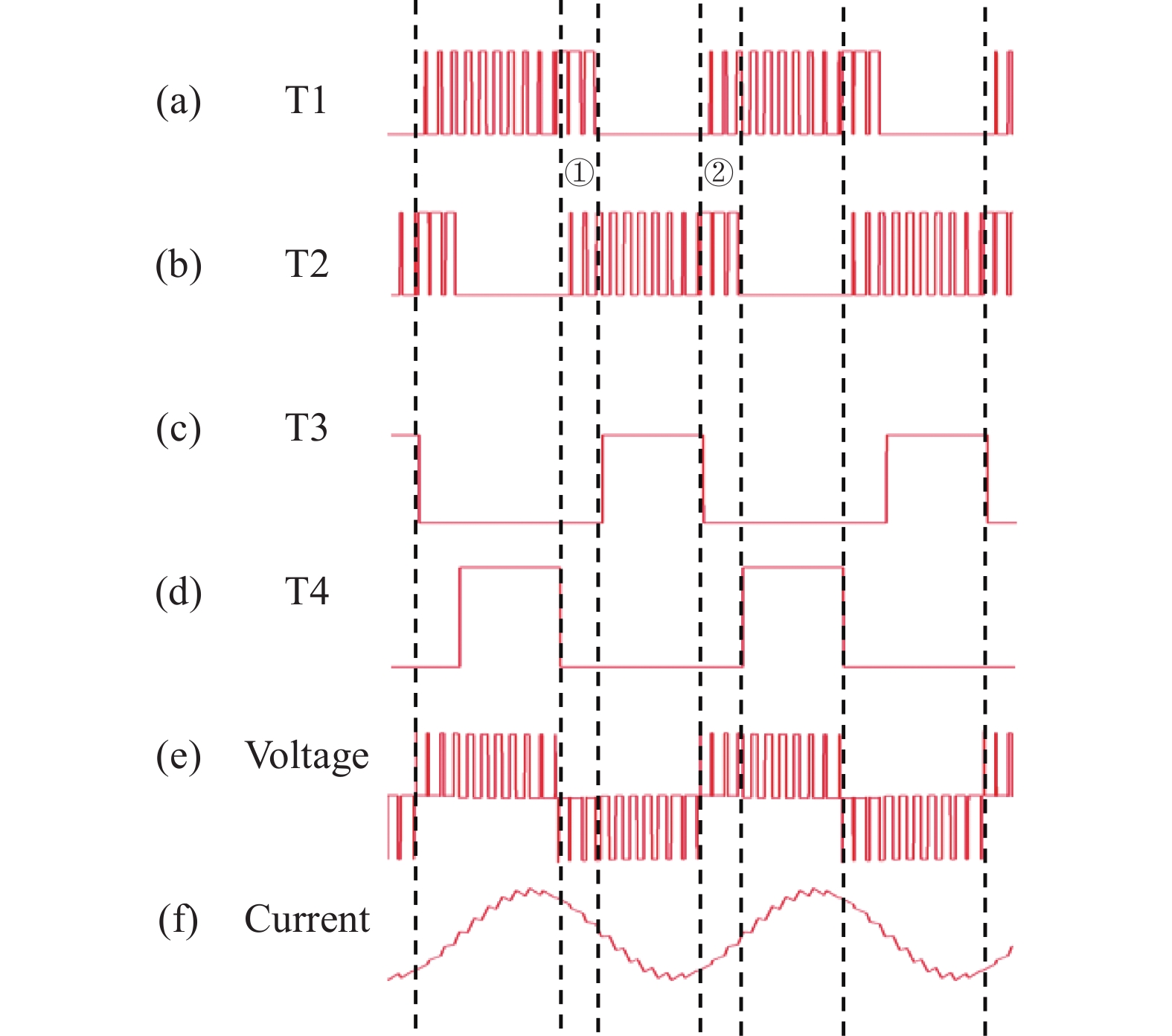
典型的驱动方法包含单极性驱动、双极性驱动及单极性倍频驱动等。在传统工程应用上常采用单极性驱动方法,利用单片机或DSP产生SPWM信号,给左上管T1和右上管T2通以SPWM信号使其往复开断,在下管T3和T4分别通以相位相差180°的方波信号,在驱动时使T1和T4信号同步输入控制信号,T2和T3同步关断形成正向正弦半波;随后向T2和T3输入控制信号,T1和T4关断形成反向正弦半波,给负载两端施加得到完整的正弦驱动波形。各管脚信号输入和负载输出如图4所示。
然而,在驱动负载感性部分较大的情况下,输入驱动信号相同,其输出的电压和电流波形如图4(g)和图4(h) 所示。以T1、T4开断的半个周期为例,将图5中的电感L和电阻R视为一个整体的负载,Uin是输入的直流电压源,则在常规的一个开关周期内SPWM开断部分存在工作状态如下。

Figure 4. MOS transistor driving signal and output waveform under traditional driving method

Figure 5. Freewheeling path after half wave under traditional driving mode
MOS管T1和T4上下导通时,有电流通路直流源——MOS管T1——负载——MOS管T4——直流源,此时电流值上升,有工作状态表达式[6]:
式中:τ表示时间常数,有
$\tau=\dfrac{L}{R}$ 。MOS管T1关断而T4依然导通,有电流通路负载——MOS管T4——体二极管D3——负载,此时电流值降低,有工作状态表达式:
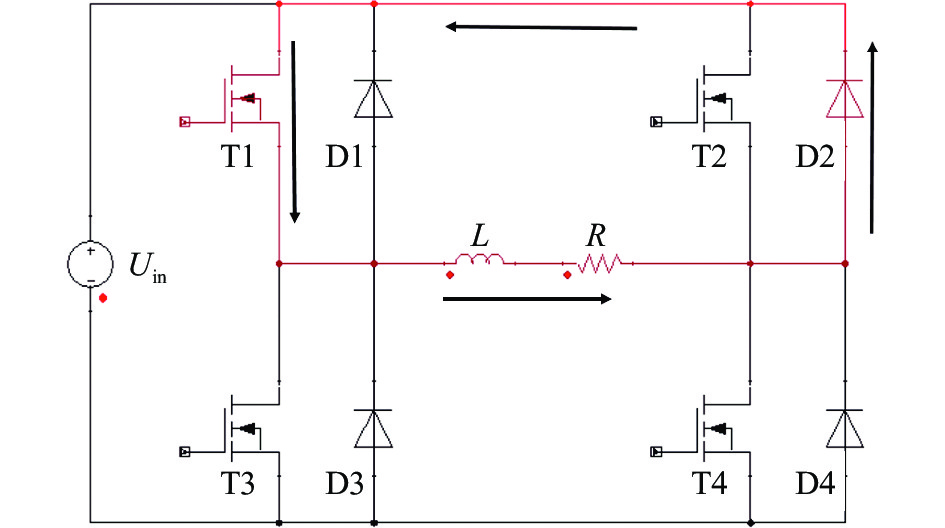
以上两个工作状态不断重复,构成了输出波形中图4(g)和图4(h)中的②阶段,④阶段同理。其中,负载端输出电压和电流的畸变部分是由于感性部分存储的电流无法在SPWM半波结束后直接降到0,需要一条续流通路将电流泄放。其泄放通路为负载——体二极管D2——直流源——MOS管T3——负载,其通路示意图如图5所示。
由于通路将负载直接连接电压两端,且与电流流向相反,通常称其为反压续流,其状态如图4(g)和图4(h)的①和③阶段[7]。其工作状态表达式为:
传统的方法优势在于简单而且开关损耗小,在一个周期内同一时间仅有一个MOS管在不断进行SPWM开关。但是显然传统驱动方式下的制冷机驱动模式受负载特性影响较大,当制冷机工作在基频状态下时可以近似为大电阻,可以在一定程度下保证输出波形的可靠性,不会导致明显的输出波形畸变;而当制冷机高频驱动下呈小电阻大电感状态时容易导致输出电压和电流波形畸变。
-
优化的驱动方法的目的是将原有的反压续流部分改为呈SPWM开断的状态,使其输出结果由图4(g)转变为同图4(e)中的结果一致,即负载两端电压为源端电压和零电压交替。为了满足这一目的,需要设计使电流通路不经过源端只经过负载,形成零压续流环路,将零压和反压环路交替进行可以最终达到改善输出波形的效果。根据全桥逆变电路的结构可以得到两条零压续流的环路[14]。基于这两种续流回路,文中提出了如下两种新的驱动方法用于改进原有的驱动方法,从而达到改善输出电压电流信号的目的。
-
在一个周期中, T1和T4管导通结束切换为关断,T2和T3即将开通,此时电路电流流通通路如图6所示。为使负载两端电压变为负电源电压和零压之间交替,可使电流续流通路从T1绕回,即负载——体二极管D2——MOS管T1——负载,其工作状态如图6所示。

Figure 6. Working loop for zero voltage freewheeling through the upper circuit
此时零压续流环路通过负载和两个上桥臂实现,其工作状态方程与公式(3)一致。
通过控制逆变桥各管脚使电流续流通路在图5和图6的工作状态下反复,可以得到良好的SPWM形状的续流结果。由于在传统驱动方法中,T1在这一半波期间并不开通,且在设计中的开通时间需要由实际的续流时间决定,需要通过采样续流信号时长通过反馈环路控制T1的开通。
-
这一方法可以通过采样T2管反向电流信号实现。当T2管检测到反向的电流信号,标志续流环节的开始。这一状态下需要控制T1管开通使电流流入,当T1导通时负载两端电压为零,T1关断时负载两端电压为负的电源电压,和原本的SPWM波关系相反,因此将原本T2管的控制信号进行反向后叠加在T1上,使T1管能够进行开通和关断。由于此时T3处于导通状态,为了避免左侧上下桥臂T1和T3同时导通发生短路,将续流期间的T3管常通信号关闭,等电感电流泄放完毕后再通以高电平信号使其导通。同理,当T1侧出现反向电流时也对T2和T4管控制信号进行改变。在这一方法中,各MOS管的输入信号如图7所示。

Figure 7. MOS transistor driving signal and output waveform of upper loop freewheeling method
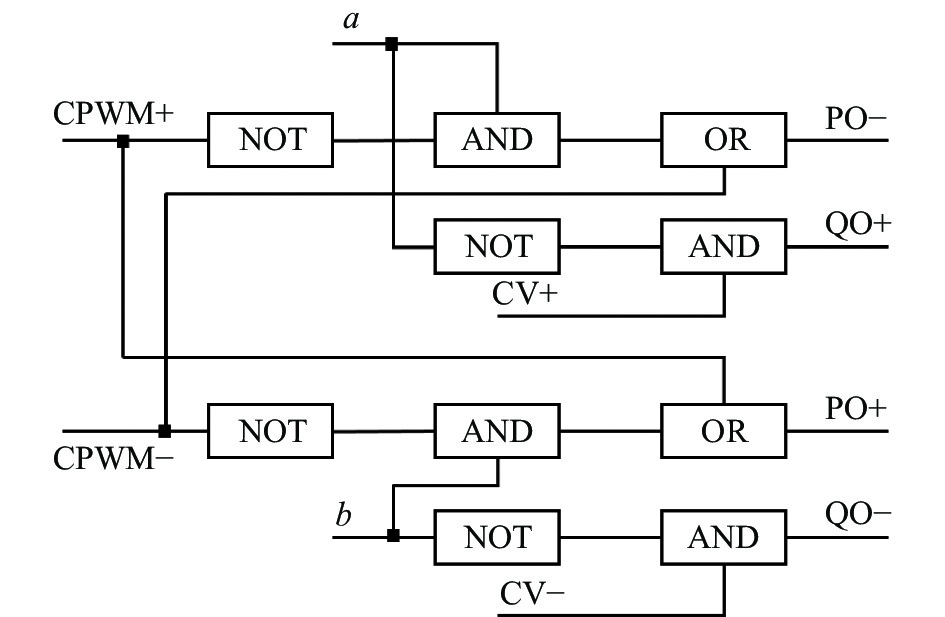
两上桥臂较传统驱动方法开断时间更长,加长部分以反向SPWM进行开断(即以大占空比作为初始状态逐个开关周期减小),两下桥臂开通时长减少,减少时间和上桥臂增加时间一致,用于避免上下桥臂同时导通造成电源短路。可以得到对T1和T2管续流信号提取及对其他MOS管的控制逻辑,如图8所示。其中,CPWM+和CPWM−分别为两个传统控制方法下的上管SPWM信号输入,CV+和CV−为相对应的两下管方波信号输入,a和b来自两上管续流电流的采样信号。PO+和PO−为经反馈后给两个上桥臂输入的实际控制信号,QO+和QO−为经反馈后给两个下桥臂的信号输入。

Figure 8. Control signal processing logic of upper loop freewheeling method
-
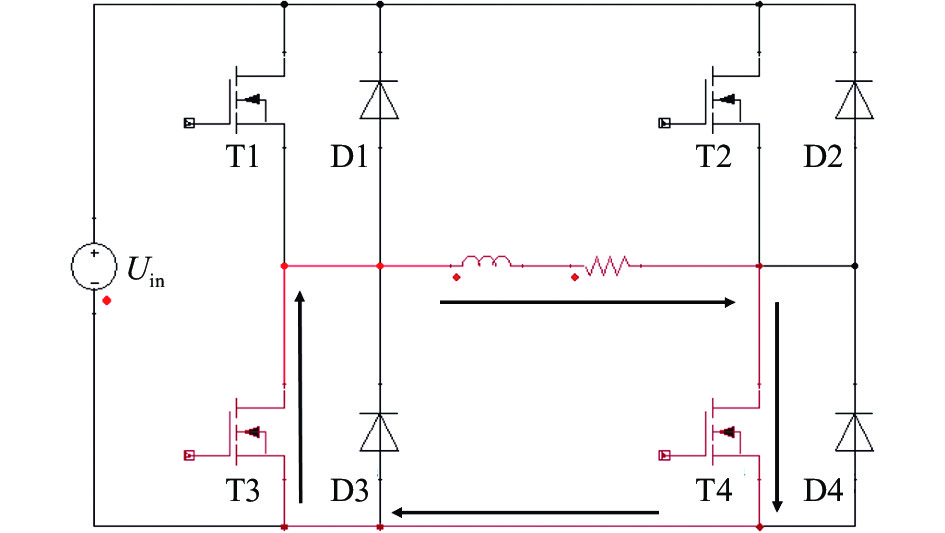
在对零压续流部分通路的选择中,可以存在另一条续流通路如图9所示。其环路为负载——MOS管T4——MOS管T3——负载,通过两个下桥臂实现。这一通路也是在逆变桥开关管常规开断状态下的续流通路。使电路在一个半波周期内保持在图5和图9的工作状态下,也可以实现抑制半波变化时输出波形畸变的问题。
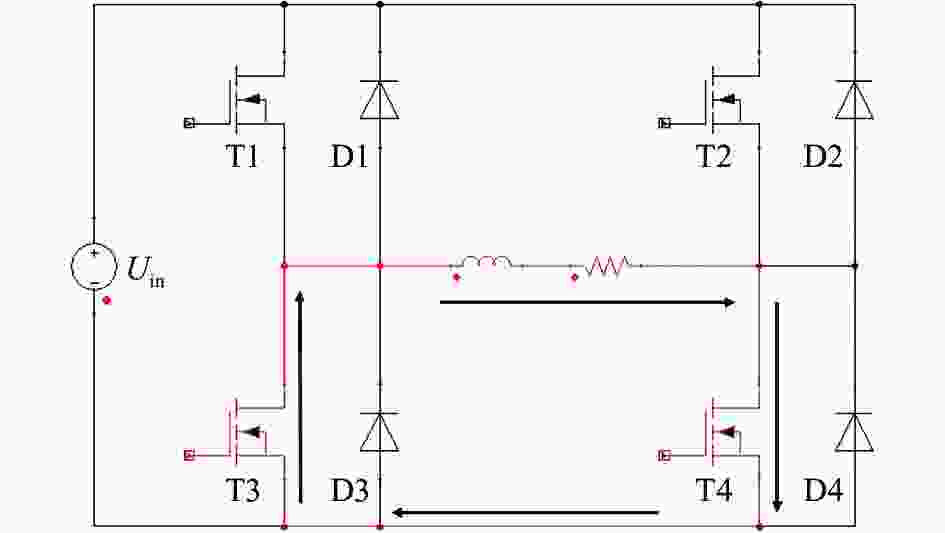
Figure 9. Working loop for zero voltage freewheeling through lower loop
-
这一方法在续流通路的选择上和常规部分(如图4(g)和(h)中的②、④部分)的续流通路是一致的,仅是将D3用T3代替。因此可以认为在某一半波中,其电流通路一直基于回路直流源——MOS管T1——负载——MOS管T4——直流源和负载——MOS管T4——MOS管T3——负载两种通路回切换。图9的工作状态可以通过使T4导通实现。因此,可以直接将某一半波中的T2和T4反复分别导通来实现负载分别接通反向电压和无外接电源的效果,同时,原本流过T4体二极管的续流部分也可以稳定通过T4管导通完成回路。这一方法下各管输入信号如图10所示。
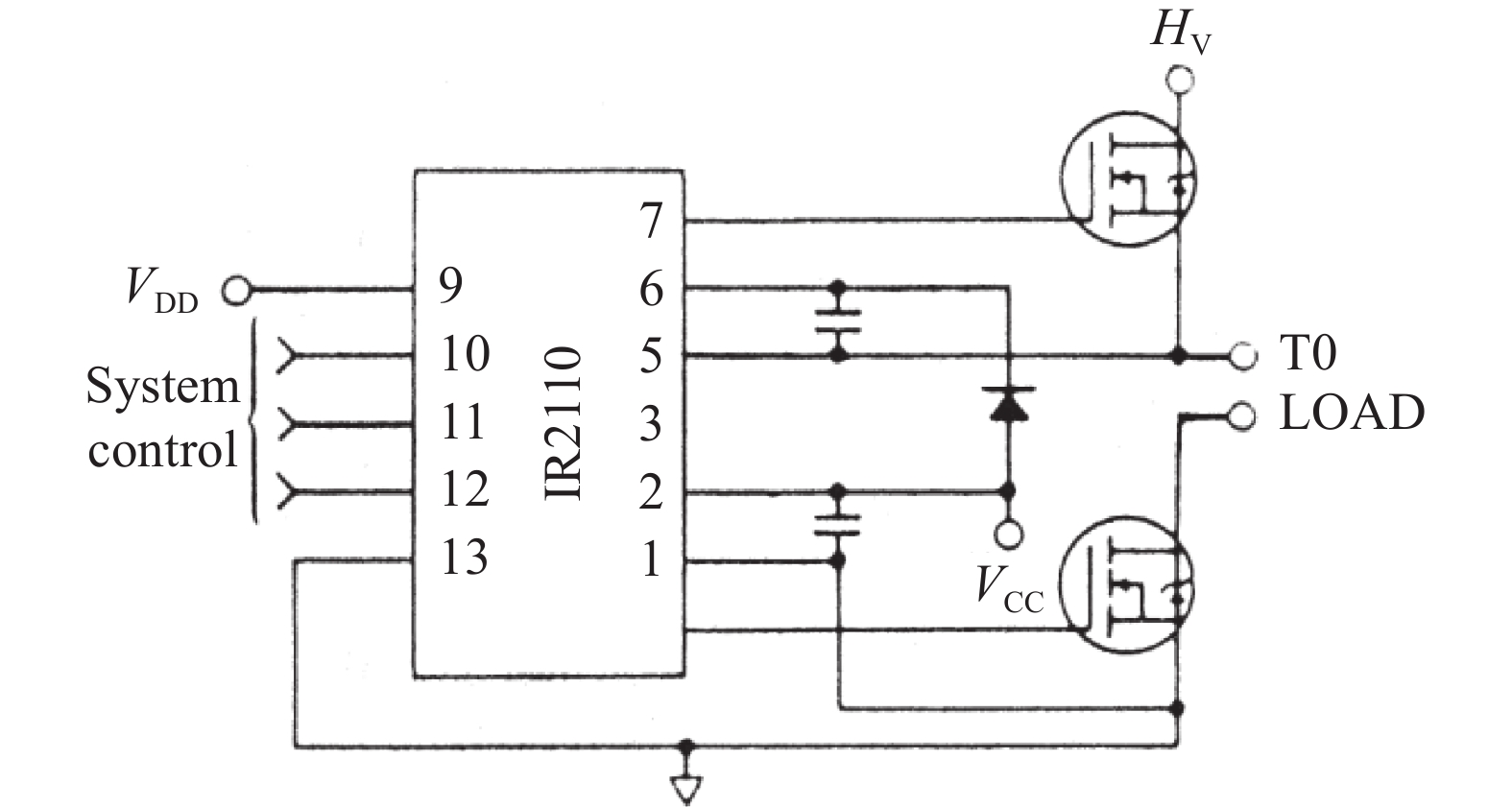
同一侧桥臂上下管信号正好反向,两个上桥臂的信号相位差180°,可以通过一个驱动信号得到剩下MOS管的控制信号。在控制同一侧桥臂上下两MOS管信号相反时,为了保证MOS管开关的同步性也同时避免上下MOS管出线同时导通的问题,可以采用芯片IR2110对输入信号进行处理[15]。
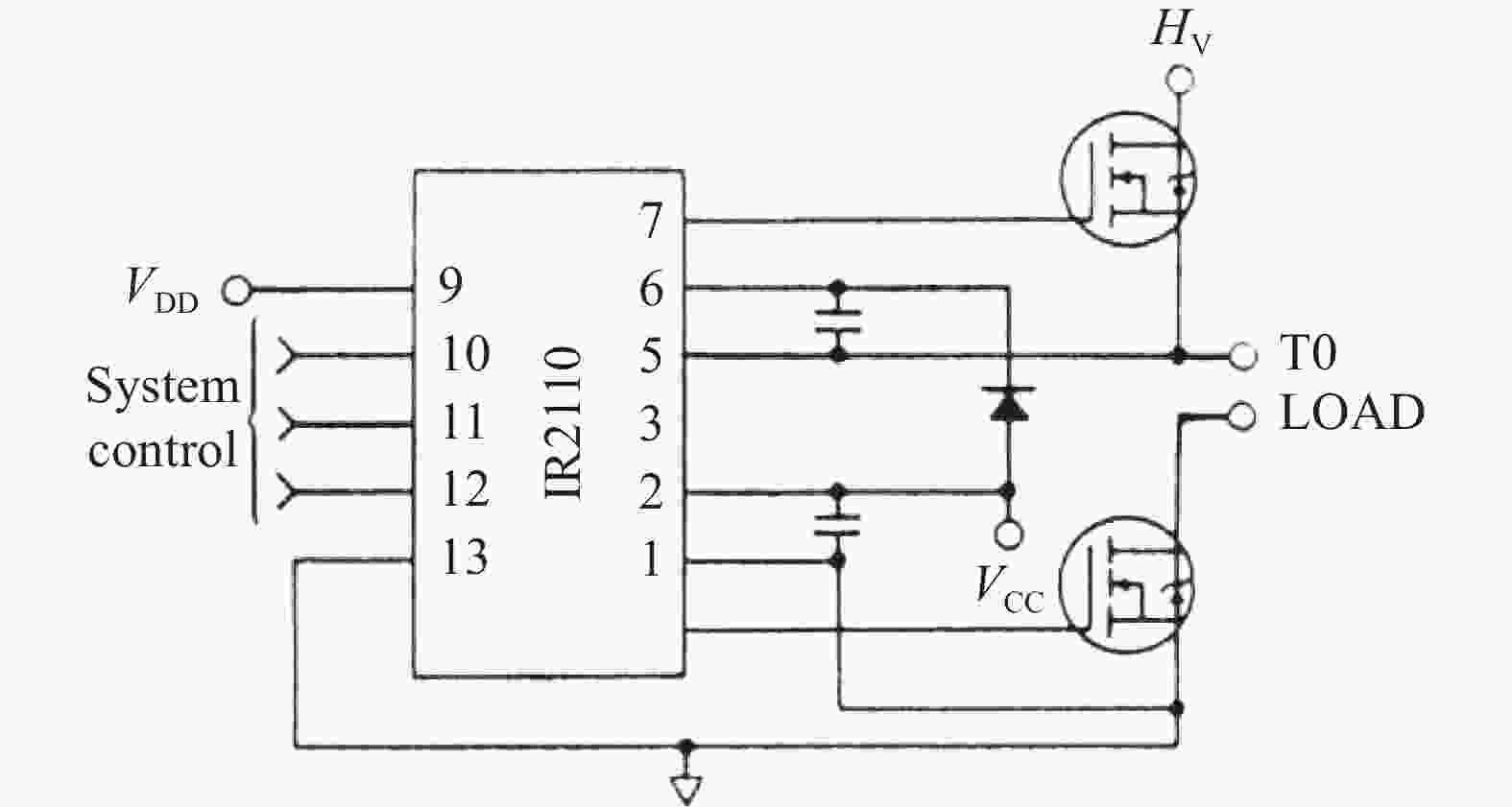
Figure 11. Typical working circuit of IR2110
IR2110是具有高可靠性的信号处理芯片,其典型工作电路如图11所示。其内部集成MOS管用于给输出信号添加死区,以保证控制信号输出后上下桥臂不会同时导通。同时,其为上桥臂的NMOS管开通提供了电荷泵,使输出的控制信号能够满足上桥臂NMOS管Vgs >> 0使其开通的效果。其外围电路设计需要满足电荷泵的电荷积累,其自举电容(图11电路5、6引脚之间)参数有一定要求,其设计大小表达式为[16-17]:
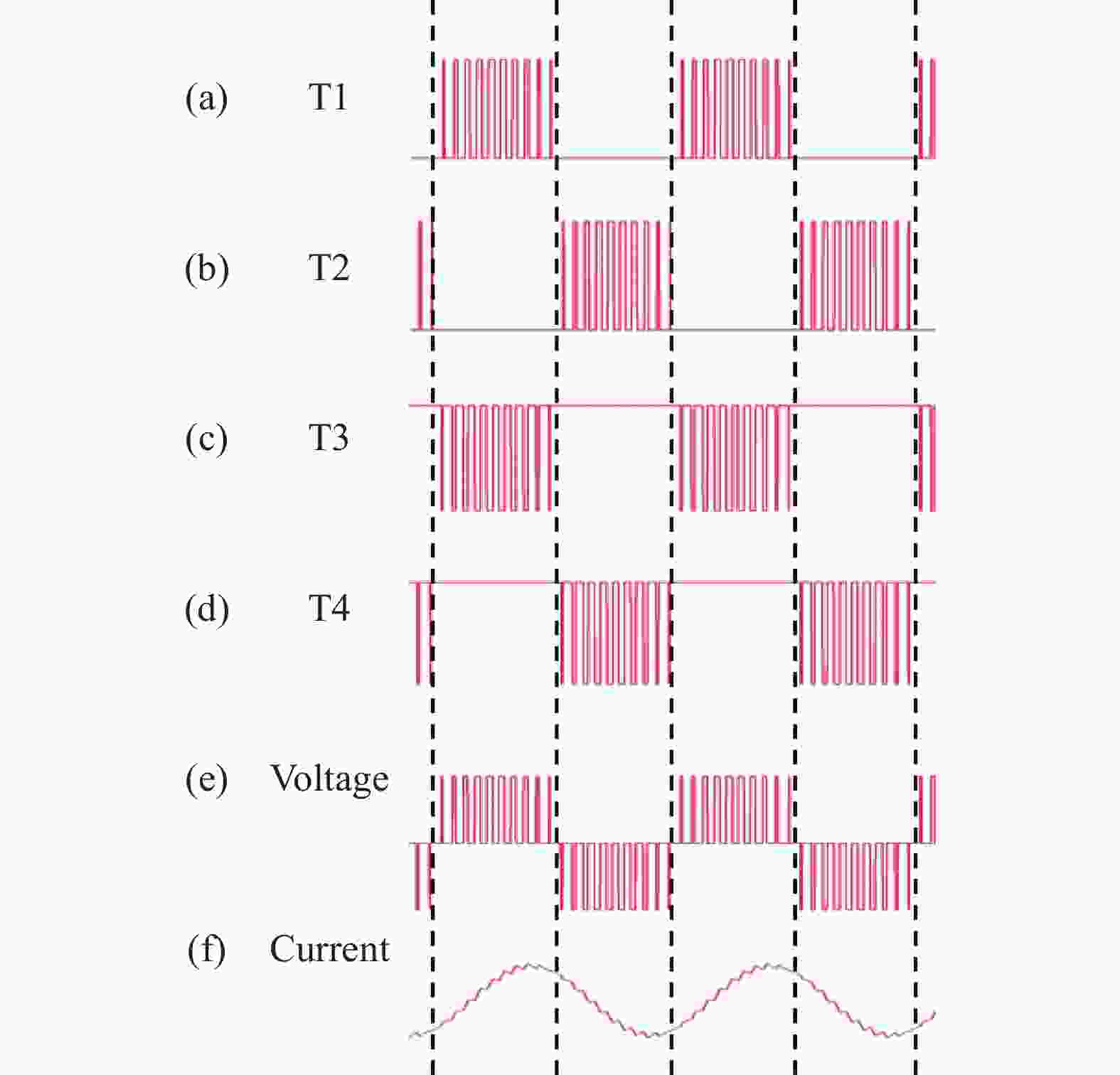
Figure 10. MOS transistor driving signal and output waveform of lower loop freewheeling method
由于分式分子中的后面几项极小,通常可以忽略并简化为:
式中:Qg表示上桥臂门极充电所需电荷量;Vcc表示充电电源电压;Vf表示自举二极管上的正向压降;VLS表示负载或下桥臂上的压降。其作用就是为下一次上桥臂提供足够的电荷量使其完成开通功能。
-
对比两种改进方法,各存在其优点和缺点。其中上回路续流方法的优势在于对原有的驱动桥不需要做改变,只需要在软件控制信号输出和MOS管之间增加信号采样和处理部分电路,同时其工作时在同一时间段仅有一个MOS管在开断,不会增加开关损耗;缺点在于信号经过采样和多个芯片处理可能存在一定延迟,导致一定的时序问题,同时当给驱动电路增加滤波器后,电流续流通路变为在负载电感、负载电阻和滤波电容中形成内部谐振,导致这一部分电能被最终消耗而不经过MOS管,会使得这一方法失效。
下回路续流方法的优势在于控制的方法直观,而且需要的信号处理芯片少,由于不存在反馈环节,可以避免出现时序问题。在后续增加滤波器的设计中,其每一个开关工作状态与传统的驱动方法一致,不会出现方法失效的问题;缺点在于在同一时间下MOS管上下管在同一时间进行反向开断,使开关损耗变为原来的两倍,因此也需要更好的散热设计,同时开关管的上下开断需要增加死区,会在一定程度上引入新的谐波问题。
而对比常用的双极性SPWM驱动方式,双极性SPWM驱动方法通过控制负载桥臂使其反复接入电源正端和负端产生SPWM波形,由于其正负半波的产生方式没有差异,在每次从正电压向负电压切换后电流即进行续流,不会产生同单极性SPWM驱动方法在半波结束后切换通路导致的半波畸变问题,因此双极性SPWM驱动方法也同样能够适用于阻感性负载的情况下。然而双极性SPWM驱动方法同样存在明显的弊端,其开关管的每一次切换会从正电源电压Uin切换为负电源电压–Uin,对比单极性仅从Uin变化到0或从–Uin到0,双极性开关管的dv/dt远大于单极性驱动方法,会导致严重的开关频率及其边频带谐波,导致严重的电磁兼容问题,切换电压过大也同样会增大电流的纹波,在一定程度上影响其输出性能,也增大了后续滤波设计的压力。取相同负载和频率参数,驱动频率50 Hz,开关频率10 kHz,对比下回路续流方法和双极性驱动方法,在实现相同幅值的正弦电压时有如图12所示的频谱结果。图中,蓝色为双极性驱动下的频谱,红色为下回路续流方法下的频谱,显然双极性驱动下开关频率及其边频带的谐波远大于文中给出的设计方法,而在驱动频率边频带上基本没有差异,能够有效保证输出波形的正弦特性。

Figure 12. Frequency spectrum of lower loop freewheeling method and bipolar driving method
-
在ANSYS Simplorer中对传统方法和下回路续流方法建立仿真,对MOS管基于元器件的DATASHEET建立模型,并建立负载制冷机等效电路工作模型[18],使其还原制冷机的实际工作状态。其工作电路如图13所示。
由于制冷机负载由两个对置压缩机构成,当中负载可被替换为两个如图1所示的等效电路并联得到,各元器件取值为:R0=1.3 Ω,L0=8.6 mH,L1=7.34 mH,R1=7.97 Ω,C1=60 μF,其中L1和C1的谐振频率为120 Hz,为制冷机额定工作频率。仿真取驱动频率为120 Hz和三倍频360 Hz,MOS管开关频率取21600 Hz,逆变桥供电电源电压为42 V,取IR2110的自举电容为1 μF,将最大占空比设为一半,得到输出电流和电压波形分别如图14和图15所示。

Figure 13. Improved method 2 cryocooler driving circuit

Figure 14. Improved method 2 (a) output voltage and (b) current waveform of 120 Hz drive

Figure 15. Improved method 2 (a) output voltage and (b) current waveform of 360 Hz drive
根据仿真结果可以得到,改进方法极大程度地改善了原本驱动方式在驱动大感性负载时的弊端,并在制冷机工作在不同频率下均保持稳定的SPWM电压波形输出和正弦电流。
-
基于改进方法2设计电路并建立实验平台,如图16所示。

Figure 16. Photo of experimental test platform
分别以基频120 Hz和三倍频360 Hz的驱动频率对制冷机负载进行驱动,对照传统驱动方法可以得到如图17和图18所示的输出电压和电流波形。

Figure 17. Traditional driving methods drive output voltage waveforms at (a) 120 Hz and (b) 360 Hz frequencies
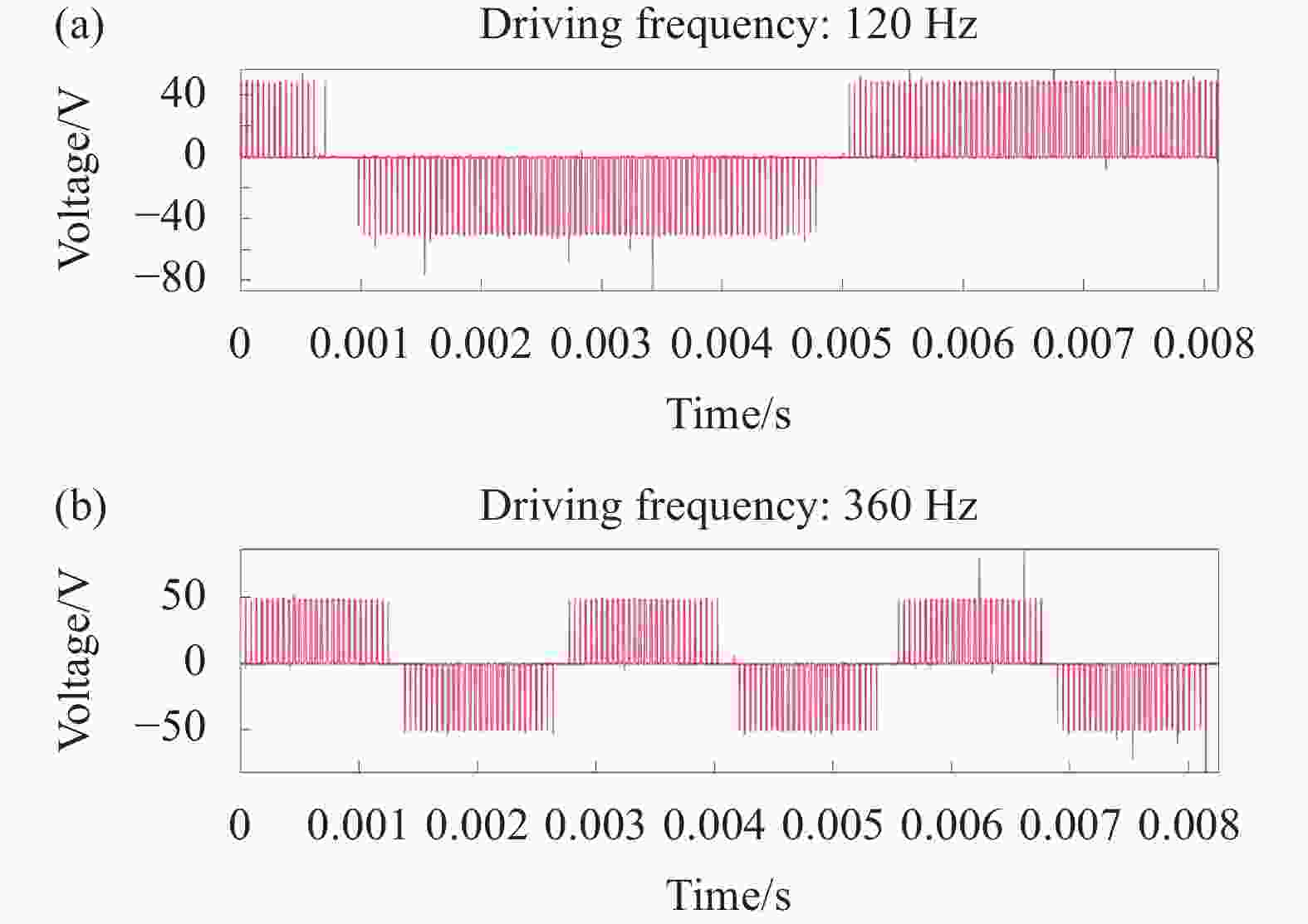
Figure 18. Improved method 2 drive output voltage waveforms at (a) 120 Hz and (b) 360 Hz frequencies
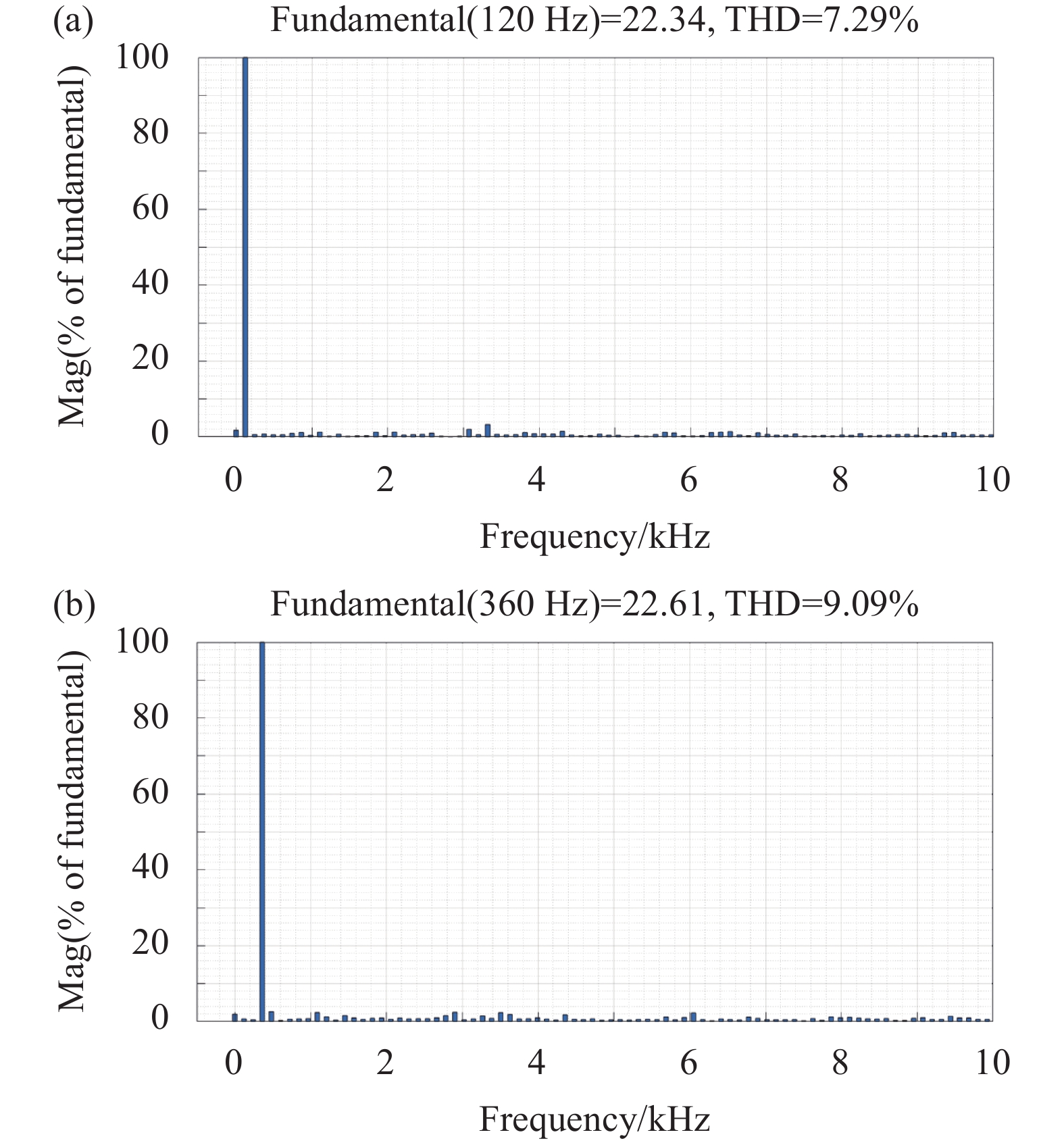
对实验输出电压和电流进行频域分析,忽略开关频率及其边频带来的高频谐波,取最大采样频率为10 kHz,可以得到如图19和图20所示的输出电压和电流波形。
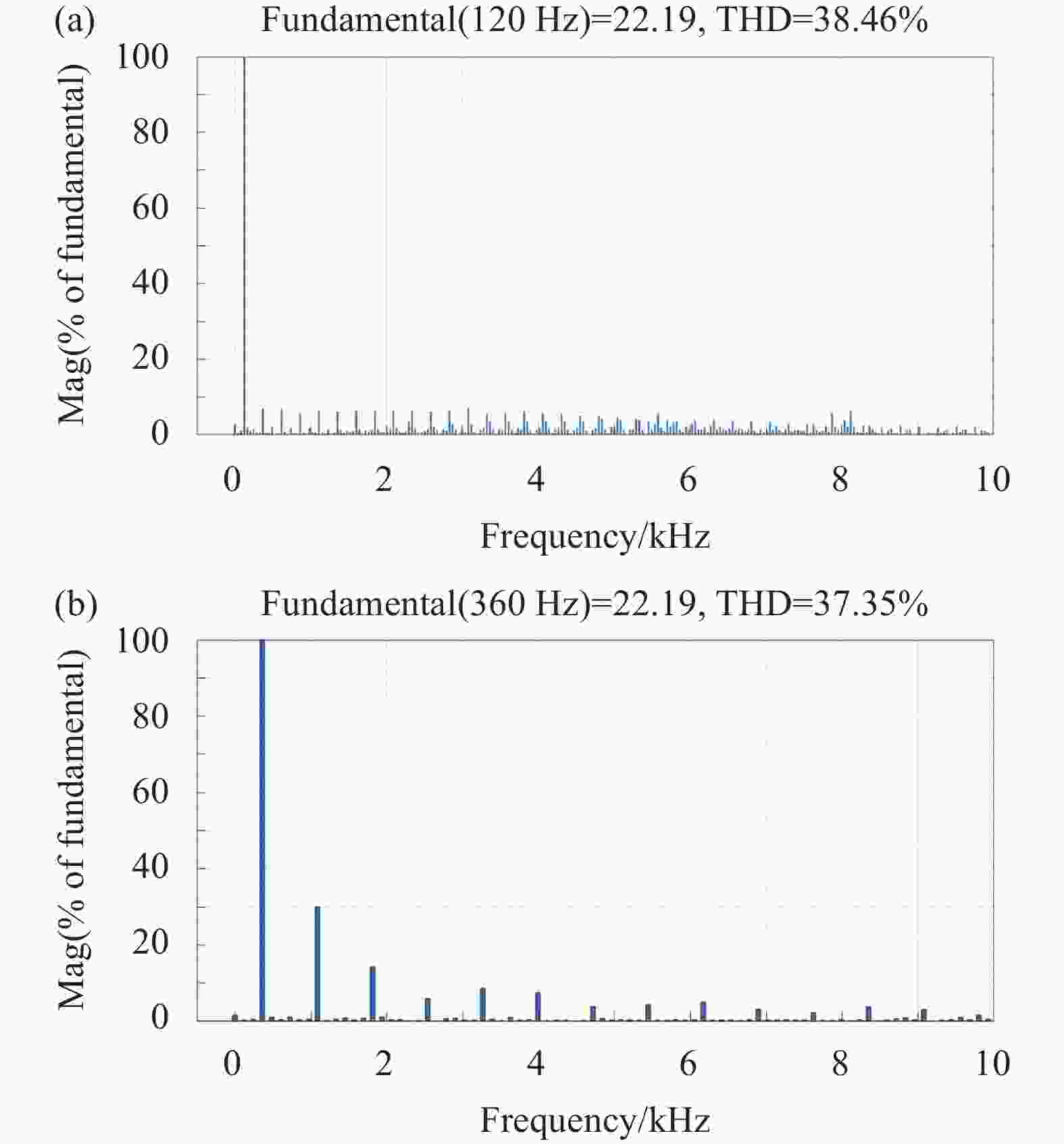
Figure 19. Traditional driving methods drive the output voltage spectrum at (a) 120 Hz and (b) 360 Hz frequencies

Figure 20. Improved method 2 drive the output voltage spectrum at (a) 120 Hz and (b) 360 Hz frequencies
传统的驱动方法下,10 kHz以内的THD在120 Hz和360 Hz频率驱动下分别为38.46%和37.35%,其中基频的THD虽然较大,但其谐波点分布均匀,在一定程度上使得输出波形畸变小,而高阶驱动下的波形存在谐波峰值,使得输出畸变严重。而改进型驱动方法下,10 kHz以内的THD在120 Hz和360 Hz频率驱动下分别为7.29%和9.09%。根据实验结果显示,传统驱动方法在驱动制冷机时其时域电压波形存在明显的反压续流部分(即图17中每个半波开始时的方波部分),在高频驱动时感性特征更显著,反压续流的持续时间也变长。这在电压波形的频域结果上也得以呈现,当基频驱动时感性部分较小,频谱中呈现较小的谐波,且幅值较为均匀,不存在明显峰值,而高频(三倍频)驱动下感性部分较大,其电压频谱也呈现明显的谐波尖峰,其中谐波最大峰值接近基波的30%。显然反压续流导致了电压频谱上的谐波的产生,当频率接近10 kHz时谐波基本消失,其范围主要位于驱动频率边频带上,这样的谐波存在直接影响了输出波形的正弦特性。改进型的驱动方法通过改变MOS管开断使得时域波形结果呈完整的SPWM形状,对比传统驱动方法结果,完全避免了传统方法导致的反压续流部分,极大地改善了制冷机输出电压波形的畸变,反压续流部分的消失使得电压更接近正弦,这也从根源上有效消除了驱动频率及其边频带的谐波。而在改进型驱动方法的电压频谱中依然存在少量的谐波,这是由于SPWM波的自身频谱特征和实际MOS管的非理想特性共同作用导致的。
-
文中基于制冷机的高频工作特性呈明显感性这一特点,提出了两种基于电流续流回路的驱动方法用于改善输出波形畸变的问题,结合实际情况给出了相应方法的实现方案,并对比了两种改进驱动方法的优缺点,在此基础上选取其中一种更具优势的方法进行了仿真和实验。在得到的实验和仿真结果中,改进后的驱动方法输出的时域电压波形呈明显的SPWM波特性,有效改善了感性特征带来的影响,验证了方法的可靠性和有效性,从根本上改变了原有驱动方法的问题,极大改善了在高频驱动下输出波形电压和电流畸变的问题,结合频谱分析,可以得到改进后的方法明显不存在驱动频率边频带的谐波,使THD降低了75%以上。同时,通过进行多个频率的驱动实验,验证了这一驱动方法在基频和高频驱动时均能有效改善输出电压的THD问题。
Optimal driving method design of infrared cryocooler under high-order driving
doi: 10.3788/IRLA20220369
- Received Date: 2022-05-30
- Rev Recd Date: 2022-12-09
- Publish Date: 2023-02-25
Fund Project:
Nation Key R & D Program of China(2018YFB0504700, 2018YFB0504701)
-
Key words:
- infrared cryocooler /
- harmonics distortion /
- freewheeling path /
- high-order driving
Abstract: High order active vibration suppression technology has been gradually applied to the multi-order vibration of space infrared mechanical cryocooler to improve the working life of cryocooler and the working performance of infrared load. When the mechanical cryocooler is driven by high-order working frequency, it will produce serious harmonic distortion, which will affect the active suppression effect of high-order vibration. By analyzing the working mechanism of the driving circuit and the high-frequency characteristics of the load, the method of using the control freewheeling path to suppress the harmonic distortion in high-order driving is put forward, and the corresponding implementation method according to the required freewheeling path is also presented. For one of the freewheeling methods, simulation and experiments show that the scheme can effectively suppress the waveform distortion and reduce the high-order harmonic distortion by more than 75%.













 DownLoad:
DownLoad: